基于Solidworks PCB数控钻床工作台的虚拟装配与运动仿真
基于SolidWorks的斜孔钻模设计及虚拟装配

第1期(总第224期)2021 年 2 月机 械 工 程 与 自 动 化MECHANICAL ENGINEERING & AUTOMATIONNo1Feb文章编号= 1672-6413(2021)01-0116-03基于SolidWorks 的斜孔钻模设计及虚拟装配孙淑婷(太原工业学院机械工程系,山西 太原 030008)摘要:完成了加工托架零件上2-010. 1 mm 斜孔的钻模设计。
首先对被加工零件的结构及相关要素进行了分析,拟定出斜孔钻模的定位、导向、夹紧、分度方案;之后用SolidWorks 软件对钻模上的零件进行了三维实体建模和钻模的虚拟装配。
虚拟装配技术的应用大大缩短了钻模的设计、制造周期,提高了零件的生产效率。
关键词:斜孔钻模;SolidWorks ;虚拟装配中图分类号:TP391.7:TH161+ . 1 文献标识码:A0引言钻床夹具因大都具有导向装置,习惯上又称为钻 模,主要用于孔加工。
在机床夹具中,钻模占有很大的 比例。
在用钻模加工零件上的孔时,绝大多数被加工 孔的轴线与钻床上安装的钻头轴线平行,这种钻模设 计相对简单。
但是,在生产实际中有些零件上被加工 孔的轴线与钻头轴线倾斜成一定的角度,加工这种孔 的钻模叫斜孔钻模,斜孔钻模的设计相对复杂。
本文 基于SolidWorks 软件设计了加工托架零件上的与钻 头轴线倾斜25° 士 20’的两个<J >10. 1 mm 孔的斜孔 钻模。
1斜孔钻模结构设计图1为被加工零件托架的工序示意图。
本工序要 加工2-^10. 1 mm 孑L,在此工序之前①33H7孔、端面AJ2和两侧面£已经加工完成。
本设计的任务是设 计钻削两个犕12的螺纹底孔2-010. 1的斜孔钻模。
A BDg.44 .033H72-010. 1^25°±20'88. 5±0. 1525°±2088. 5±0. 152-R18 E图1托架加工工序示意图1. 1 工序加工要求1)零件上两个010. 1 mm 孔的轴线与O 33H7 孔的轴线之间的夹角为25°士20'。
基于solidwork的三维建模和运动仿真的开题报告
基于solidwork的三维建模和运动仿真的开题报告基于SolidWorks的三维建模和运动仿真的开题报告一、研究背景随着计算机技术的不断发展,三维建模和运动仿真技术在工程设计领域中得到了广泛应用。
SolidWorks作为一款专业的三维建模软件,具有强大的建模和仿真功能,被广泛应用于机械、电子、建筑等领域。
本研究旨在探究基于SolidWorks的三维建模和运动仿真技术在工程设计中的应用,为工程设计提供更加精确、高效的解决方案。
二、研究内容1. SolidWorks的基本操作和建模技术本研究将首先介绍SolidWorks的基本操作和建模技术,包括建立零件、装配体和图纸等操作。
通过学习SolidWorks的基本操作和建模技术,可以快速掌握SolidWorks的使用方法,为后续的运动仿真打下基础。
2. SolidWorks的运动仿真技术本研究将重点探究SolidWorks的运动仿真技术,包括建立运动学模型、定义运动学参数、设置运动学分析等操作。
通过运动仿真技术,可以模拟机械、电子等系统的运动过程,分析系统的运动特性,为工程设计提供更加精确的解决方案。
3. 实例分析本研究将通过实例分析的方式,探究SolidWorks的三维建模和运动仿真技术在工程设计中的应用。
以机械系统为例,通过建立运动学模型、定义运动学参数、设置运动学分析等操作,模拟机械系统的运动过程,分析系统的运动特性,为工程设计提供更加精确、高效的解决方案。
三、研究意义本研究将探究基于SolidWorks的三维建模和运动仿真技术在工程设计中的应用,具有以下意义:1. 提高工程设计的精度和效率通过SolidWorks的三维建模和运动仿真技术,可以更加精确地模拟机械、电子等系统的运动过程,分析系统的运动特性,为工程设计提供更加精确、高效的解决方案。
2. 降低工程设计的成本和风险通过SolidWorks的三维建模和运动仿真技术,可以在设计阶段发现和解决问题,降低工程设计的成本和风险,提高工程设计的成功率。
基于SolidworksPCB数控钻床工作台的虚拟装配与运动仿真

基于SolidworksPCB数控钻床工作台的虚拟装配与运动仿真作者:王建春周松霖王晓兵来源:《中国新技术新产品》2015年第19期摘要:基于Solidworks软件平台,建立PCB数控钻床工作台的三维结构模型,并对建好的模型进行虚拟装配。
展示了工作台部分各零件间的装配关系,利用干涉检查和运动仿真,查找虚拟装配体中存在的问题,改进并完善装配体。
虚拟装配规范了装配工艺,对工作台的后续研发具有重大的意义。
关键词:Solidworks;工作台;虚拟装配;干涉检查;运动仿真中图分类号:TG506 文献标识码:A我国PCB数控钻床目前存在的问题是:(1)零件的整体性差,累积误差大;(2)单一零件装配后达不到应有效果,有些无法装配。
(3)结构设计及优化存在着一定问题。
所以,我国的PCB数控钻床还需要不断的改进和提高。
本文基于Solidworks软件,对钻床的工作台部分进行虚拟装配和运动仿真。
由此,可以很好的了解工作台的装配关系、装配信息、装配规划、装配路径、装配工艺,并规范装配过程。
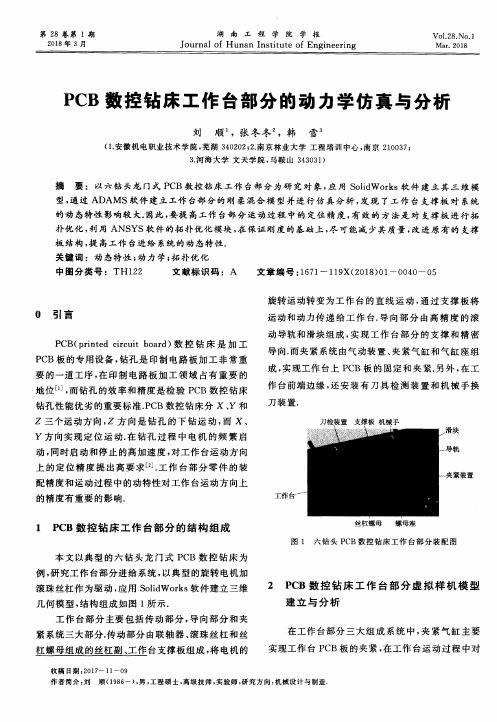
1 工作台的工作原理PCB数控钻床的工作台(Y轴)主要由导轨、直线电机、工作台面、夹紧机构、机械手、刀具检测装置、光栅尺位移传感器等组成。
导轨的作用是对工作台面起支撑作用,并控制着工作台面的水平运动方向。
直线电机是提供工作台运动的动力,直线电机直接控制着整个工作台Y方向的进给速度、进给加速度、定位精度与重复定位精度。
待加工的PCB板上安装有定位针,由工作台上安装的夹紧机构夹紧定位针,保证PCB板在加工过程中不会偏移。
机械手和刀具检测装置的作用分别是对刀具的更换和刀具工作情况的检测。
光栅尺位移传感器是高精度的反馈装置,观察和跟踪走刀误差,起一个补偿刀具误差的作用。
在钻孔过程中,待加工的PCB板由夹紧装置固定在工作台面上,直线电机带动工作台面在水平方向(Y轴)做往复运动。
工作台在移动过程中配合加工主轴对PCB板进行钻孔。
在钻孔时,根据加工需要对刀具进行检测和更换。
SolidWorks运动仿真完全教程
15
运动副基础知识(6)
In Line点在直线上
In Plane点在面内
方向
指定 的面
连接点
连接点
X参考轴
约束2个移动自由度
约束构件1的连接点,只能沿着构件2连接点 标记的Z轴运动
© 2007 SolidWorks Corp. Confidential.
a Concentric joint.
– 一个正交同轴配合转化为同轴副
One Coincident and One Orthogonal Concentric mates in
SolidWorks becomes a Revolute joint.
– 一个重合和一个正交同轴配合转化为一个转动 副
One Point to Point coincident mate in SolidWorks
Pendulum restrained to pivot about mounting point
5
Constraint Mapping约束映射
▪ Mapping of SolidWorks assembly mates (constraints) to COSMOSMotion joints.
映射SolidWorks装配体配合(约束)为 COSMOSMotion的运动副
运动约束 PointPoint PointPointDist PointLine PointLineDist PointPlaneDist PointPlaneDist PointLineDist PointLine LineLine LineLineDist LineLineAng LineLineAng (0 deg.) LineLineAng (90 deg.)
基于solidworks的数控试验台的虚拟装配
摘要虚拟装配技术可帮助产品摆脱对于试制物理样机并装配物理样机的过度依赖,有效地提高产品装配建模的质量与速度,有助于降低产品开发成本,缩短产品开发周期。
利用虚拟装配技术对数控试验台进行虚拟装配,首先通过在SolidWorks软件平台上对设计好2D图纸数控试验台工作台、底座、调整板、轴承支座等零部件进行3D建模,然后在计算机三维软件solidworks上对已经建立的产品零件按照产品的装配关系完成各部件的三维装配模型,在装配的过程中同时进行干涉检查,利用应用软件提供的功能进行装配零件之间的静态干涉检查,一旦发现有设计不合理之处及时调整并修改设计图纸,保证在虚拟环境下的装配精确性和合理性,从而可缩短产品制造与装配生产过程的时间,降低产品的装配成本,提高设计质量。
关键词:虚拟装配;装配路线;静态干涉;干涉检查; 3D建模AbstractVirtual assembly technology products can help get rid of the physical prototype and assembly for the trial of over-reliance on physical prototypes, effectively improve product quality and speed of assembly modeling, help to reduce product development costs, shorten product development cycles. Then the computer on the three-dimensional software solidworks product components in accordance with the established relationship between the product to complete the assembly assembly model three-dimensional parts In the process of assembling the same time interference check of application software functions provided by the static interference between the assembly parts inspection, if found unreasonable to adjust the design and modify the design drawing.In a virtual environment to ensure accuracy and rationality of the assembly, thus shortening the production process of product manufacturing and assembly time, reduce product assembly costs and improve design quality. NC virtual assembly technology test bed for virtual assembly, first through the SolidWorks software platform to design a good test bed CNC 2D drawing table, base, adjust the plate, bearing supports and other components for 3D modeling.Key—words:Virtual Assembly;Path Planning;Static Interference;Interference Check;3D Modeling目录1 绪论11.1 研究背景11.2 课题目的和意义31.2.1 虚拟装配技术的主要功能 (3)1.2.2 虚拟装配的研究内容 (4)1.3 国内外的研究现状51.3.1 国内的研究现状 (5)1.3.2 国外的研究现状 (6)2 虚拟装配建模82.1 左轴承支座的建模82.1.1 创建左轴承支座主体 (8)2.1.2 加工凸台 (9)2.1.3 拉伸切除底部孔 (11)2.1.4 添加圆角 (12)2.1.5 拉伸切除 (12)2.2 底座的建模142.2.1 创建底座主体 (14)2.2.2 完成侧边创建 (16)2.3 轴承的三维建模182.3.1 角接触球轴承的特点及用途 (18)2.3.2 生成轴承7205内外圈 (19)2.3.4 球体的生成 (21)2.3.5 为轴承内外圈指定材质 (23)2.3.6 更新装配体 (24)2.3.7 零件整体尺寸的检查 (24)3 装配公差分析263.1 尺寸链计算263.2 极值法分析装配性能273.2.1 左轴承支座与角接触球轴承7205的公差分析 (28)3.2.4 左轴承支座与法兰盘的公差配合分析 (29)4 数控试验台虚拟装配过程314.1 数控机床试验台总体机构314.2 数控试验台装置装配特点314.3装配过程324.4 装配体干涉检查374.4.1 干涉检查 (38)4.4.2 干涉模型的修改 (39)5 爆炸图制作41总结与展望45参考文献46致谢471 绪论1.1 研究背景当今社会,市场要求企业不断缩短新产品从概念设计到产品投放市场的时间(Time.to.market),企业不断将各种先进的设计制造手段应用于产品开发制造。
PCB数控钻床工作台部分的动力学仿真与分析
型 ,通 过 ADAMS软件 建 立工作 台部 分 的 刚柔 混 合模 型并 进 行 仿 真分 析 ,发 现 了工 作 台支撑 板 对 系统
的动 态特性 影 响较 大 因此 ,要 提 高工作 台部 分 运 动 过程 中的 定 位精 度 ,有效 的 方 法是 对 支撑板 进 行 拓
扑 优化 ,利 用 ANSYS软 件 的拓扑 优化 模 块 ,在 保证 刚度 的 基础 上 ,尽 可 能减 少其质 量 ,改进 原 有 的 支撑
板 结 构 ,提 高 工 作 台 进 给 系 统 的 动 态特 性 .
关 键 词 :动 态特性 ;动 力 学 ;拓 扑优化
中 图分 类 号 :TH122
文献 标识 码 :A 文章 编 号 :1671—119X(2O18)Ol一0040—05
0 引 言
PCB(printed circuit board)数 控 钻 床 是 加 工 PCB板 的 专用设 备 ,钻 孔 是 印 制 电路 板 加 工非 常重 要 的一 道工 序 ,在 印制 电路 板 加 工 领 域 占有 重要 的 地位 [1],而钻孔 的效率 和精 度是 检 验 PCB数 控 钻床 钻孔 性 能优 劣 的重要 标准 .PCB数控 钻床 分 x、y 和 Z 三个 运动 方 向 ,z 方 向是 钻 孔 的 下 钻 运 动 ,而 X、 y 方 向实现 定 位 运 动.在 钻 孔 过 程 中 电机 的频 繁 启 动 ,同时启 动和 停止 的高加 速度 ,对 工作 台运 动方 向 上 的 定 位 精 度 提 出 高要 求 _2].工 作 台部 分 零 件 的装 配精 度 和运 动过 程 中 的动特 性对 工作 台运 动方 向上 的精度 有 重要 的影 响.
和振 动对 工 作 台定 位 精 度 有 重要 影 响.在 进 给 系 统 件 的 ANSYS有 限元模 型 ,如 图 2所 示.
基于SolidWorks开发的机构运动方案设计虚拟实验系统
为了更好地实现实验目的,提高实验效率,作者以机构运动方案设计实验的要求、实验原理、方法为蓝本,用计算机虚拟实验技术,模拟仿真该实验的全过程,设计了一个机构运动方案设计虚拟实验系统.应用该系统,学生在实验前在计算机上对自己所设计方案的可行性、正确性进行可视化验证,然后再进行实际的拼接,提高了实验效率.1 虚拟实验系统的功能1)必须具备齐全的模型、而且尽量接近实物,这样才能对实验进行真实的模拟.2)灵活性强,零件的参数能根据需要随时进行调整,实现尺寸驱动功能,即改变其中一个零件的参数后,只需要重建模型,其它零件的相应点的位置会跟着发生改变,零件之间依然保持相应的联结关系,而不需重新进行装配.3)对于机构运动的模拟仿真功能.4)具有运动特性分析和动力特性分析的功能.5)具有实验指导功能.系统的结构流程图如图1所示.图1 系统的结构流程图2系统开发方法虚拟实验系统选用的平台是三维设计软件系统SolidWorks。
SolidWorks它是基于Windows 的全参数化特征造型软件,可十分方便地实现复杂的三维零件实体造型、复杂装配和生成工程图,以参数化和特征建模的技术为核心,为设计人员提供了良好的设计环境,还可以方便地对SolidWorks进行二次开发.用户二次开发的应用程序,可直接挂在SolidWorks的菜单下,形成统一的界面.一般而言,开发人员首先需要在SolidWorks的界面上添加自己的菜单项,以此作为激活用户程序的接口,完成与用户的数据交换。
SolidWorks的API(Application Programming Interface应用编程接口)提供了两种接口方式:有OLE Automation的Idispatch和作为Windows基础的COM(Component Object model).Idispatch 的方法可用于VB、VBA或VC的开发环境,常作为快速开发的手段.本文开发的实验系统所使用的程序就是采用的Idispatch接口方法,用VC++6.0编写的.在程序编好后,编译即可形成DLL文件.不同的操作系统需要用不同的设置:Windows95/98采用"MBCS";WindowsNT/2000采用"Unicode";生成需要的3dll文件后,就可以使用SolidWorks 的"文件/打开"菜单,在过滤器中选择"AddIns(3.dll)",加载自己的DLL.若该DLL在注册表中注册成功,还可使用"工具/插件"菜单进行一次性加载,以后启动SolidWorks,就可自动加载该DLL,无须再进行加载操作,十分方便.3系统功能的实现3.1实验装配零件库的建立为了满足模型齐全的要求,笔者选用SolidWorks2001进行零件的三维造型,并把所有实验室内要用到的零件做成了一个零件库.通过对SolidWorks进行设置,可以使自己创建的零件库像工具条一样陈列在SolidWorks主窗口中.具体方法是:通过选择SolidWorks主菜单中的工具选项选择文件位置,将文件夹显示为调色板零件,再选"添加",选中自己的零件库文件夹的存放位置.要使用这个零件库,只需要打开它就可以了.方法是,启动SolidWorks后,在工具下选择FeaturePalette,随后便有一个小窗口被打开,选中用户添加的文件夹,就会有一个新的窗口打开,创建的零件库内所有零件都以图标的形式陈列在窗口内,就好象在真实实验里看到的摆放在实验室里的零件一样.但使用起来比在真实实验室里方便多了,你只需要移动滑动条,就可以找到所需要的零件.3.2机构运动设计方案的确定在拟订方案之前,首先可以从过去成功的设计案例中进行检索,看是否有与设计要求类似的设计案例.如果有,则以这个案例为模板,并对其作适当的修改,以满足当前的设计要求.这样做即可以保证设计要求,还可提高设计效率.如果没有类似的设计案例,则利用所掌握的专业知识和经验进行新的设计.机构运动方案的设计具体由以下几个步骤组成:1)输入设计要求(包括输入输出间的函数关系和工艺动作要求等等)以及外部的各种约束条件.2)将设计要求及外部条件分解成各个基本动作、基本运动及其约束条件3)初步选定能完成设计要求的基本机构或已有案例.4)将初步选定的基本机构进行组合,得到多种可能的设计方案.5)对各种方案进行初步的尺度综合.6)对各种方案的机构进行性能分析(包括运动和动力性能分析).7)对各种方案进行评价和排序,以选出最满意的方案.8)如果所有方案均不满意,则重新进行机构选型及组合、尺度综合及性能分析、方案评价及排序等工作.其中对方案的机构性能分析可以通过所设计的虚拟实验系统来完成.学生要做的就是先按以上步骤初步确定设计方案,画出机构运动简图,然后利用虚拟实验系统进行虚拟装配,给出初始输入条件,让系统进行分析计算,学生根据分析计算结果对设计方案优劣作出判断,如果满意,则根据确定的方案进行实际的拼接,如果不满意,则对机构进行构型演化,再装配,再分析,直至得出满意方案.3.3虚拟装配在虚拟装配之前在磁盘上新建一个文件夹,用以存放选择的零件和最后形成的装配体.首先选出装配所需要的零件,从零件库拖出相应零件的图标,系统就会打开相应零件的编辑窗口,选择另存为,把这个零件存放到新建的文件夹中.注意不要改变没有保存的编辑窗口中零件的各项参数,因为放在这个零件库中的零件是一个参考模板文件,它的参数一旦发生改变,所有以它为参考模板文件生成的文件中的相应参数都会发生改变,所以在拖出图标后,一定要将其另存到自己的文件夹中.即可以在装配之前选好所要用的零件,也可在装配时随取,一般只需要选好几类零件就可以了.SolidWorks是基于Windows操作系统的,使用起来完全和Windows 一样,可以利用复制、粘贴的形式在装配体窗口内生成同样类型的多个零件.如果是初始装配,则需打开一个新的装配体文件,将选好的零件插入到这个装配体文件中,在零件之间添加相应的装配配合关系就可以了.各构件之间的装配关系和其运动副关系是这样定义的:若是转动副,则在两零件连接处添加端面贴合和同轴心关系;若是移动副,则在两零件接触处添加平面贴合关系.对于机架和导轨等固定不动的构件通过右击SolidWorks特征管理树(Feature manager)中相应零件的实体名,在弹出的菜单内选择固定来实现.由于是虚拟装配,自然比真实装配轻松得多.因为SolidWorks可以实现尺寸驱动,所以改变装配完的机构中构件的某些参数,如杆长,机架的位置后,只需要对装配体机构进行重建模型,其它零件的相应位置会根据配合关系跟着改变,而不需要拆卸后重新装配.图2所示为运用此系统装配好的四杆机构,并且已在SolidWorks界面上加载了自己的菜单,准备进行运动仿真.3.4对机构运动的干涉检查在装配体形成后,首先要对其进行初步的干涉检查.可以使用SolidWorks自带的干涉检查功能.如果觉得不够直观的话,则可以用拖动其中某个构件的方法,观察各个构件的运动情况,直观地看它们的运动是否会发生干涉.进一步的干涉检查,可以在运动的仿真过程中.选择编程加载的菜单下运动仿真项,对装配搭建的机构进行运动仿真.在仿真过程中可以观察到是否发生干涉,如果发生干涉,两个零件将有重叠的部分,这就需要对机构中的参数进行调整.3.5机构运动的仿真机构的动态仿真的实现相当于在每一运动时刻,将各个构件根据约束摆放到空间的指定位置上.构件的初始位置在装配体装配好以后就确定了,其中机架位置的坐标值用户是可以自己设定的,而构件在运动当中的各个数据是由外部机构分析程序提供.因此,这种机构三维仿真方法不受机构的复杂性和自由度所限制.给出不同的输入,外部分析程低碳马氏体在热作模具中的应用/mjsj/133.htmlCr13模具钢开裂焊接工艺与Cr13模具钢磨损焊接工艺/zyzs/218.html 电热水器选择五要点与如何选购安全的灯具/zyzs/226.html序会提供不同的运动数据分析结果,使机构得以实现不同的运动.运动数据分析结果被存储在数据库中以便需要时进行调用.3.6机构运动特性分析和动力学特性分析运动仿真之后,还需要对机构进行运动特性和动力学特性分析.从而判断出所设计出的机构的优劣.方法是输出特征点的位置、速度、加速度、和力分析曲线.具体实现是通过VC编程绘制曲线图,从数据库中取出保存好的绘图所用的数据.如果所设计的方案未打到设计要求,就需要修改设计方案,进行机构构型的演化.演化的方法主要有运动副变换、加杆组、运动倒置、加自由度、运动等效变换,不断对方案进行修改,然后装配,进行运动学特性和力学特性分析,直到形成最满意的方案.3.7实验指导功能实验指导主要是在修改设计方案时,系统提供帮助信息,告诉以通过那些方法来优化机构,在学生选好一种方法后,系统会给出方法的原理,帮助使用者快速地修改方案引言混凝土搅拌机是使混凝土配合料均匀拌和而制备混凝土的专用机械,是现代化建设施工中不可缺少的机械设备。
基于斯沃仿真系统的数控虚拟加工技术

基于斯沃仿真系统的数控虚拟加工技术随着计算机技术的普及应用,数控加工仿真系统因其功能强大、交互性好、操作便捷和安全可靠等优点,在数控技术相关课程教学中越来越得到广泛应用。
本文以典型的轴类零件为研究对象,结合MasterCAM自动编程技术,重点介绍基于斯沃数控仿真系统的数控虚拟加工技术在教学中的应用。
通过研究得出在虚拟环境中数控加工,不仅丰富了教学手段,提高了学生学习兴趣,还有效解决了在数控技术课程实验教学中因数控设备昂贵与资金短缺而造成的教学效果不理想、效率低的问题。
一、引言xx年5月,教育部高校转型改革方向已明确,国家普通高等院校1200所学校中,将有600多所转向职业教育。
转型改革就要求应用型机械类本科专业人才的培养,除了满足普通高等教育的要求外,还要求突出“能设计、会操作、懂管理”的能力。
因此,应用型机械人才的培养,既不同于一般本科的培养,又必须区别于单纯技能型培养的高职学生。
由于制造业高速发展,数控机床在制造加工中的使用越来越普遍,数控产品技术的推广与应用,需要大批既有一定理论知识又具备实际操作技能的应用型机械人才。
随着数控加工和虚拟现实技术的发展,数控虚拟加工技术成为一项非常有效的辅助手段。
数控虚拟加工是结合机床厂家实际加工制造经验与学校教学训练所开发的一种机床控制虚拟仿真系统,在教学中应用,不仅有效解决了传统数控机床占地面积大、耗材多、成本高及投入大等不足,而且通过近6年的《数控技术及应用》课程教学和学生的反馈信息得出,采用数控虚拟加工技术作为前期的辅助教学手段是一种安全有效的教学模式和教学途径。
二、斯沃仿真系统简介目前数控加工仿真软件众多,这些仿真软件能在计算机上进行三维仿真,模仿数控机床操作,并能进行手工编程或CAD/CAM自动编程,与实物机床有较好的兼容性。
斯沃仿真软件是南京斯沃软件技术有限公司开发的仿真软件,可以将虚拟现实技术应用于数控加工操作技能培训和考核,界面显示自然友好,图1所示为FANUC Oi-T的仿真面板。
基于SOLIDWORKS环境下的实体建模和模拟装配

论文题目:基于solidworks环境下的实体建模和模拟装配班级:姓名:学号:基于solidworks环境下的实体建模和模拟装配摘要:对solidworks模块功能进行简单介绍,并阐述应用solidworks软件对机械零件建模的基本过程。
通过实例描述在solidworks环境下可以对实体模型运用多种方法建立和机械零部件转配基本过程,为学习和掌握solidworks环境下的机械零件设计提供技术指导。
关键词:solidworks;零件;装配;Solidworks软件简介Solidworks是基于windows环境下开发的CAD软件,有全面的实体造型功能,可快速生成完整的工程图纸,还可进行模具的制造及计算机辅助设计分析。
目前solidworks软件已成为三维机械设计软件的标准。
该软件的显著优点为:功能强大无与伦比的、基于特征的实体建模功能;采用智能化装配技术、智能零件技术和镜像部件等技术来加快装配体的总体装配体;技术先进的互联网协同工作能力等。
整个产品设计是百分之百可编辑的,零件设计、装配设计和工程图之间全相关。
易学易用可视化、可交互式用户界面,为用户提供一整套完整的动态界面和鼠标拖动控制,有效减少了设计步骤和多余的对话框。
技术创新第一个基于windows平台的三维机械CAD软件;第一个创造了特征管理员的设计思想;第一个在windows平台下实现了自顶向下的设计方法;第一个实现动态装配干涉检查的CAD软件;第一个实现智能化装配的CAD软件;第一个开发特征自动识别的软件;第一个开发基于Internet的电子图版发布工具。
Solidworks模块功能1)零件建模S olidWorks提供了无与伦比的、基于特征的实体建模功能。
通过拉伸、旋转、薄壁特征、高级抽壳、特征阵列以及打孔等操作来实现产品的设计。
通过对特征和草图的动态修改,用拖拽的方式实现实时的设计修改。
三维草图功能为扫描、放样生成三维草图路径,或为管道、电缆、线和管线生成路径。
PCB数控钻床工作台部分的动力学仿真与分析

PCB数控钻床工作台部分的动力学仿真与分析刘顺;张冬冬;韩雪【摘要】以六钻头龙门式PCB数控钻床工作台部分为研究对象,应用SolidWorks 软件建立其三维模型,通过ADAMS软件建立工作台部分的刚柔混合模型并进行仿真分析,发现了工作台支撑板对系统的动态特性影响较大.因此,要提高工作台部分运动过程中的定位精度,有效的方法是对支撑板进行拓扑优化,利用ANSYS软件的拓扑优化模块,在保证刚度的基础上,尽可能减少其质量,改进原有的支撑板结构,提高工作台进给系统的动态特性.【期刊名称】《湖南工程学院学报(自然科学版)》【年(卷),期】2018(028)001【总页数】5页(P40-44)【关键词】动态特性;动力学;拓扑优化【作者】刘顺;张冬冬;韩雪【作者单位】安徽机电职业技术学院,芜湖 340202;南京林业大学工程培训中心,南京 210037;河海大学文天学院,马鞍山 343031【正文语种】中文【中图分类】TH1220 引言PCB(printed circuit board)数控钻床是加工PCB板的专用设备,钻孔是印制电路板加工非常重要的一道工序,在印制电路板加工领域占有重要的地位[1],而钻孔的效率和精度是检验PCB数控钻床钻孔性能优劣的重要标准.PCB数控钻床分X、Y和Z三个运动方向,Z方向是钻孔的下钻运动,而X、Y方向实现定位运动.在钻孔过程中电机的频繁启动,同时启动和停止的高加速度,对工作台运动方向上的定位精度提出高要求[2].工作台部分零件的装配精度和运动过程中的动特性对工作台运动方向上的精度有重要的影响.1 PCB数控钻床工作台部分的结构组成本文以典型的六钻头龙门式PCB数控钻床为例,研究工作台部分进给系统,以典型的旋转电机加滚珠丝杠作为驱动,应用SolidWorks软件建立三维几何模型,结构组成如图1所示.工作台部分主要包括传动部分,导向部分和夹紧系统三大部分.传动部分由联轴器、滚珠丝杠和丝杠螺母组成的丝杠副、工作台支撑板组成,将电机的旋转运动转变为工作台的直线运动,通过支撑板将运动和动力传递给工作台.导向部分由高精度的滚动导轨和滑块组成,实现工作台部分的支撑和精密导向.而夹紧系统由气动装置、夹紧气缸和气缸座组成,实现工作台上PCB板的固定和夹紧.另外,在工作台前端边缘,还安装有刀具检测装置和机械手换刀装置.图1 六钻头PCB数控钻床工作台部分装配图2 PCB数控钻床工作台部分虚拟样机模型建立与分析在工作台部分三大组成系统中,夹紧气缸主要实现工作台PCB板的夹紧,在工作台运动过程中对系统的动静态特性影响较小,分析时可以忽略,而进给系统是工作台部分传递运动与动力,其受力变形和振动对工作台定位精度有重要影响.在进给系统中联轴器和滚珠丝杠对工作台部分系统的动态特性影响不大[3],视为刚体.滚动导轨系统在工作台沿Y方向进给运动中起到导向与支撑作用,由于安装稳固,本身结构变形小,对整个工作台部分系统的影响不大,视为刚体.对于目前六钻头的数控钻床为减小工作过程中的振动,工作台普遍采用花岗石材料,所以其振动、结构变形小,也视为刚体.2.1 ADAMS软件系统动力学分析ADAMS软件广泛用于机械系统的动力学分析,可以建立包括刚体和柔性体的复杂动力学模型,通过软件分析可以避免复杂的理论动力学模型,直观的了解机械系统中结构部件的运动与受力情况.ADAMS软件动力学分析是运用其内部的Solver求解器完成,求解器的理论基础是运用Euler-Lagrange方法得到动力学方程,再运用New-Raphson方法求解[4].对于简单的多刚体动力学模型,忽略了机械系统各构件的受力变形.简单的受力变形较小的机械零部件,仿真结果与实际误差较小,但受力复杂的机械系统中,重要零部件的弹性振动和变形不可忽略,不能将其看为简单的刚体,而将其视为柔性体,建立刚柔混合动力学模型[5].由于刚体运动的位移和柔性体内部的弹性位移相互耦合,所以刚柔混合动力学模型的分析也比较复杂[6].2.2 工作台部分刚柔混合模型的建立ADAMS软件进行动力学仿真建立柔性体的三种方法,前两种是利用ADAMS软件建立柔性体,适用于几何形状规则简单的柔性体,对于几何形状复杂的机械结构零件,建立柔性体比较困难,所以应用ANSYS软件对三维零件的几何模型进行网格划分,建立有限元模型,导入到ADAMS软件中进行动力学仿真分析[7]. (1)简化模型.根据工作台部分运动过程中的受力情况以及各个部件之间的装配关系和作用,不考虑机械手换刀装置、刀具检测装置、以及气动夹紧装置等零部件对运动和动力分析的影响,简化三维模型.(2)将工作台支撑板、丝杠螺母座等零件的三维几何模型依次导入到ANSYS软件中,选择合适的单元类型mass21和solid92,确定常实数,添加材料属性,进行网格划分,建立支撑板、丝杠螺母座等零件的ANSYS有限元模型,如图2所示.图2 支撑板和丝杠螺母座有限元模型(3)建立ANSYS有限元模型的外连接点和刚性区域,并生成ADAMS软件能够识别的中性模态(MNF)文件.(4)将SolidWorks软件建立的简化虚拟装配模型导入到ADAMS软件,添加材料属性,添加构件之间的约束,在工作台上施加载荷,建立工作台部分多刚体系统动力学模型[8].构件之间的运动副约束之间关系如表1所示.(5)将支撑板、丝杠螺母座等几何模型生成的MNF文件导入到ADAMS软件中,通过外连接点和刚性区域衔接,代替工作台部分多刚体动力学模型中的支撑板、丝杠螺母座等重要零件模型,完成工作台部分刚柔混合动力学模型的建立.表1 构件之间的约束关系零件1零件2约束关系自由度滚珠丝杠丝杠螺母螺旋副1丝杠螺母丝杠螺母座固定副0丝杠螺母座支撑板固定副0支撑板工作台固定副0滚动导轨滑块移动副1滑块工作台固定副0(6)建立好刚柔混合模型后,设置仿真终止时间为1 s,仿真步数为1000步.理想情况下工作台部分系统的输入为(1)对(1)式求其一阶和二阶导数,得出(2)(3)其中,P为滚珠丝杠的导程,和分别为滚珠丝杠的输入角位移、角速度和角加速度,而Xt、X′t和X″t为丝杠螺母的线位移、线速度和线加速度.以角加速度的形式,通过STEP函数在滚珠丝杠处添加输入驱动,点击仿真按钮完成仿真.工作台理想的速度、加速度曲线如图3所示.图3(a) 驱动理想运动曲线图3(b) 工作台部分理想加速度曲线按照上述建模方式,分别建立以支撑板和丝杠螺母座为柔性体的刚柔混合模型,执行仿真,并选择工作台上坐标点为测量点,得到分别以支撑板和丝杠螺母座为柔性体的加速度运动曲线,如图4所示.通过图4的仿真结果可以看出,高速高精度的工作台进给系统中,支撑板和螺母座的弹性变形会影响工作台部分的瞬态定位误差,从而影响工作台的定位精度.但丝杠螺母座的弹性变形对工作台部分的定位误差影响并不明显,而以支撑板为柔性体的加速度曲线对工作台的动态特性影响较大.工作台支撑板是系统的薄弱环节,所以要提高工作台的动态特性,需要针对支撑板结构进行优化设计,在保证刚性的基础上,合理减少支撑板材料,改进结构,提高工作台部分系统的动态特性.图4 工作台部分加速度响应曲线3 工作台支撑板的结构优化和改进PCB数控钻床工作台支撑板是工作台部分进给系统中非常重要的零件.起到连接丝杠螺母座和钻床工作台,传递运动和动力的作用.在工作台频繁高速的启动与停止过程中,产生较大惯性力,工作台支撑板受力变形,导致钻孔过程中的定位误差.拓扑优化是寻求最优的拓扑结构,利用ANSYS软件的拓扑优化功能,以支撑板的柔顺度为目标函数,体积为约束函数,寻求最优的材料分布,通过减少支撑板结构的材料,使工作台运动系统中的惯性力减小,提高工作台运动过程中的结构刚度.3.1 支撑板结构平面拓扑优化过程根据支撑板在进给系统中和工作台、丝杠螺母座的装配关系和受力情况,在支撑板连接点处添加固定约束和载荷力.根据支撑板的材料,确定弹性模量为1.22×105 MPa、泊松比为0.25和材料密度7800 kg/m3,选择迭代次数为12次,材料减少的优化目标,执行优化.查看减少50%和70%材料时的节点伪密度分布,优化结果如图5所示.3.2 优化结果分析和结构改进利用ANSYS软件的后处理模块功能,分别查看减少50%和70%材料时的目标函数的优化迭代曲线,如图6所示.通过图6可以看出,减少50%材料时的最小柔顺度为169.471 m/N,而减少70%材料时的最小柔顺度为321.099 m/N,所以减少50%材料时的柔顺度最小,材料的结构刚度最大.通过拓扑优化给支撑板的结构改进提供了参考,根据支撑板结构的节点伪密度分布情况,合理减少材料结构,保证结构刚度.改进后的支撑板结构如图7所示.图7 改进型支撑板结构4 结论通过ADAMS软件的动力学仿真分析,工作台支撑板的弹性变形对系统产生瞬态的定位误差,其刚性对工作台的加速度影响较大,而其他零部件的弹性变形对工作台的加速度影响较小,通过拓扑优化改进原有支撑板结构.结果表明,改进后的支撑板结构对工作台部分的动态特性有了一定的改善.在实际的生产应用过程中,提高了该型号的数控钻床工作台的定位精度.参考文献【相关文献】[1] 王英章.高精高速微孔PCB数控钻床关键技术的研究与应用[D].重庆:重庆大学,2004.[2] 王忠林.印制电路板加工精度因素分析[J].印制电路信息,2004(10):20-24.[3] 王丁磊.影响进给系统动特性的因素分析[J].机械设计与制造,2010(10):210-212.[4] 袁士杰,吕哲勤.多刚体系统动力学[M].北京:北京理工大学出版社,1992.[5] 刘延柱,洪嘉振,杨海兴.多刚体系统动力学[M]北京:高等教育出版社,1989.[6] 张冬冬.新型PCB数控钻床的动力学分析与研究[D].成都:西华大学,2013.[7] 张冬冬,张均富,邹文韬. PCB数控钻床下钻机构的动力学分析与仿真[J].机械与电子,2012(10):29-32.[8] 李军,邢俊文,覃文浩.ADAMS实例教程[M].北京:北京理工大学出版社,2002.。
基于Solidwords机用虎钳的虚拟装配及运动仿真
目录1 绪论 (1)2 模拟仿真技术概述 (1)2.1模拟仿真技术的概念 (1)2.2模拟仿真的产生与发展 (2)2.3模拟仿真技术的关键技术 (2)3 SOLIDWORKS概述 (3)3.1S OLID W ORKS软件介绍 (3)3.2S OLID W ORKS软件特点 (3)3.3S OLID W ORKS软件在机械零件设计中的应用 (4)4 机用虎钳 (6)4.1机用虎钳的定义及分类 (6)4.2机用虎钳的用途及工作原理 (6)5 基于SOLIDWORKS的模拟仿真实例 (6)5.1基于S OLID W ORKS的三维实体建模 (7)5.1.1 固定钳身的三维实体建模 (7)5.1.2 活动钳身的三维实体建模 (9)5.1.3 丝杠的三维实体建模 (10)5.1.4 螺母的三维实体建模 (12)5.1.5 护口板的三维实体建模 (12)5.1.6 其余零部件 (13)5.2高级装配设计 (14)5.2.1 机用虎钳的虚拟装配 (15)5.2.2 装配体的干涉检查 (17)5.2.3 机用虎钳的爆炸视图 (17)5.3运动仿真动画的制作过程 (19)5.3.1 物理模拟的方法 (19)5.3.2 机用虎钳的运动仿真 (19)6 结论 (20)致谢 (20)参考文献 (21)1 绪论计算机辅助设计(Computer Aided Design,简称CAD),是辅助设计人员利用计算机强有力的计算功能和高效率的图形处理能力,进行工程和产品的设计与分析,以达到理想的目的或取得新成果的一种技术。
CAD技术已经成为加速产品更新、提高产品质量、提高市场竞争力的工具;是提高产品设计和工程设计水平、降低能耗、缩短产品开发周期、提高劳动生产率的重要手段。
目前,CAD技术正朝着集成化、智能化、网络化和多媒体化的方向发展[1]。
计算机仿真技术是世界各国十分重视的一项高新技术。
仿真是以计算机系统为基础,根据用户的要求,建立实际系统的数学模型,并使之转换为仿真模型,在不同的工况下,在计算机系统中运行演示,从而真实地展现实际系统运行状态的过程。
SolidWorks三维设计及运动仿真实例教程 实例10 轴类零件三维设计

拉伸切除:铣键槽
倒角:车C2倒角
阶梯轴建模过程分析 阶梯轴建模过程
新建零件文档
选择棒料特征的右端面,单击【草图】工具栏中 的【圆】按钮,将指针移到草图原点,指针变化时,
拉伸凸台:下料
单击并移动指针,再次单击即完成圆的绘制。单击
拉伸切除:车右轴颈
【智能尺寸】按钮将圆的直径设置为35mm,单击
拉伸切除:掉头车齿轮座
Solidworks
三维设计及运动仿真实例教程
教你玩转三维设计
实例10 轴类零件三维设计
10.2 齿轮轴三维设计实例
齿轮轴建模过程分析 齿轮轴建模过程
本例设计齿轮轴,齿轮的齿为斜齿,其参数如下表所示。
法向模数 齿数 螺旋角 齿顶圆直径
5 17 8°7′(左旋) 95.86
分度圆直径 齿根圆直径 端面齿厚 基圆直径
新建零件文档 拉伸凸台:下料 拉伸切除:车右轴颈 拉伸切除:掉头车齿轮座 拉伸切除:车左轴颈 拉伸切除:铣键槽
1、画草图 选择前视基准面,选择【视图定向】【正视于】, 单击【草图】工具栏上的【直槽口】按钮,绘制键槽 草图。给槽口中心线和草图原点添加【重合】关系, 并单击“智能尺寸”按钮囹为其添加定位尺寸:槽距 轴肩3mm和定形尺寸:槽长45mm和槽宽12mm, 如图所示。
倒角:车C2倒角
专家提示:在标注圆弧之间 的距离时,可以直接点击两个圆 弧的象限点,也可以在【尺寸】 对话框中单击【引线】选项卡, 【圆弧条件】选择【最大】。
阶梯轴建模过程分析 阶梯轴建模过程
新建零件文档 拉伸凸台:下料 拉伸切除:车右轴颈 拉伸切除:掉头车齿轮座 拉伸切除:车左轴颈 拉伸切除:铣键槽 倒角:车C2倒角
Solidworks
三维设计及运动仿真实例教程
基于Solidworks印制板钻床Z轴的虚拟装配

( p r i n t e d c i r c u i t b o a r d )d r i l l i n g m a c h i n e p a r t s ,a n d t h r o u g h v i r t u a l a s s e mb l y t o p u t t h e p a r t s t o g e t h e r .
设计与研究 D e s i n d R e s e a r c h
基于 S o l i d wo r k s E I ] ¥ U 板 钻 床 Z轴 的虚 拟 装 配
马飞达 蔡长韬 蔡 良金
( 西华 大学机 械工 程 与 自动 化学 院 , 四川 I成都 6 1 0 0 3 9 )
弊端 , 加 以改进 , 完善 虚拟装 配 , 装配最 后通 过制 作动 画来演 绎其运 动过 程仿真 。进 而提 高 了产 品 的 研发 速度 , 降低 了加工 成本 , 规 范 了装 配工 艺 , 提 高 了生产 效 率。 关 键词 : S o l i d w o r k s 印 制板钻床 z轴 虚拟 装配 中图分 类号 : T P 3 9 1 . 9 ; T H1 2 8 文 献标识 码 : A 运动 过程 仿真
Ac c o r d i n g t o t h e o r d e r o f a s s e mb l y,s h o w t h e a s s e mbl y r e l a t i o n s h i p o f v a r i o u s p a r t s o f t h e Z—a x i s p a r t s . Th r o u g h i n t e fe r r e nc e c h e c ki ng t o in f d d r a wb a c k s f o r i mp r o v i n g t h e v i r t u a l a s s e mbl y,a n d i n t e r p r e t i t s s i mu l a t i o n o f t h e mo v e me n t p r o c e s s b y t h e a n i ma t i o n i n e n d o f t h e a s s e mb l y.T hi s me t h o d( a n i mp r o v e t h e s p e e d o f r e s e a r c h a n d d e v e l o p me n t ,r e d u c e p r o c e s s i n g c o s t s,r e g u l a t e t h e a s s e mb l y p r o c e s s a n d i m-
基于SolidWorks的虚拟装配路径规划研究
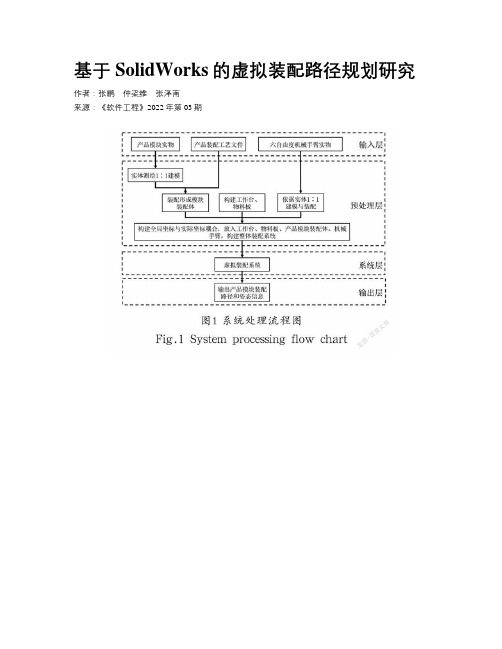
基于SolidWorks的虚拟装配路径规划研究作者:张鹏仲梁维张泽南来源:《软件工程》2022年第03期摘要:在机械产品制造过程中,装配工作占有重要的地位,其成本可以占到制造成本的30%—50%。
装配工作对产品的最终质量也有很大影响。
虚拟装配可以提前模拟装配过程,对保障装配质量和最终产品质量有着重要的意义,机械手臂的应用也使得装配工作更可控。
本文基于SolidWorks三维模型设计软件,利用SolidWorks提供的API接口,通过.NET编程语言控制机械手臂,对产品零件进行装配模拟、碰撞干涉检查和机械手臂运动空间路径规划,最终生成机械手臂装配最优路径,大大减少了人工对机械手臂运动的调试工作,提高了产品的最终质量,对加速制造业发展具有重要意义。
关键词:虚拟装配;六自由度机械手臂;包围盒;蚁群算法中图分类号:TP319 文献标识码:AResearch of Virtual Assembly Path Planning based on SolidWorksZHANG Peng, ZHONG Liangwei, ZHANG Zenan(School of Mechanical Engineering, University of Shanghai for Science and Technology,Shanghai 200093, China)*****************;**************;*****************Abstract: In the manufacturing process of mechanical products, assembly work plays an important role, and its cost can account for 30% to 50% of the manufacturing cost. Assembly work also has a great impact on the final quality of products, as it can simulate assembly process in advance, which is of great significance to ensure assembly quality and final product quality. The application of manipulator also makes the assembly work more controllable. Based on SolidWorks 3D model design software and its API interface, this paper proposes to use .NET programming language to control the manipulator, and conduct assembly simulation of product parts, collision interference inspection and manipulator movement space path planning. Finally, the optimal path for the manipulator assembly is generated. It greatly reduces the manual adjustment of the movement of the manipulator, improves the final quality of the product, and is of great significance for accelerating the development of the manufacturing industry.Keywords: virtual assembly; six-degree-of-freedom (six-DOF) manipulator; bounding box; ant colony algorithm1 引言(Introduction)在機械制造等领域,装配是产品生产过程中必不可少的一步,装配工艺的把控也直接影响着产品的质量以及产品的检修工作[1]。
钻孔加工设备虚拟仿真控制系统构建

钻孔加工设备虚拟仿真控制系统构建1. 引言钻孔加工设备是制造业中常见的机械设备之一,广泛应用于金属加工、航空航天、汽车制造等多个领域。
为了提高钻孔加工设备的效率和精度,虚拟仿真控制系统成为了不可或缺的工具。
本文将深入探讨钻孔加工设备虚拟仿真控制系统的构建,帮助读者更全面地理解该系统的原理和功能。
2. 虚拟仿真控制系统的定义和作用钻孔加工设备虚拟仿真控制系统是一种基于计算机技术的控制系统,利用数值模型和仿真技术对钻孔加工过程进行模拟和控制。
该系统可以实时模拟钻孔过程中的各个环节,包括刀具选择、切削参数设定、钻孔进给速度控制等。
通过虚拟仿真控制系统,操作人员可以在计算机上进行实验和调试,从而提前发现和解决潜在的问题,提高钻孔加工的效率和质量。
3. 钻孔加工设备虚拟仿真控制系统的构成要素钻孔加工设备虚拟仿真控制系统主要包括以下几个要素:3.1 数值模型数值模型是虚拟仿真控制系统的核心组成部分,它是对钻孔加工设备的数学模型进行建模和仿真的工具。
数值模型通常包括钻头、工件、切削液、切削力等各个参数,并通过计算机程序进行相应的计算和模拟。
通过数值模型,操作人员可以对钻孔加工的各个环节进行仿真和控制。
3.2 控制算法控制算法是虚拟仿真控制系统的关键部分,它负责根据数值模型中的参数进行计算和控制。
常见的控制算法包括PID控制、自适应控制、模糊控制等。
控制算法的选择和设计需要考虑到钻孔加工设备的具体情况和要求,以实现稳定、高效的钻孔加工过程。
3.3 用户界面用户界面是操作人员与虚拟仿真控制系统进行交互的工具,它向操作人员提供各个参数的设置和实时的仿真结果。
一个好的用户界面应该具有简洁明了、易操作的特点,方便操作人员进行系统调试和性能优化。
4. 虚拟仿真控制系统的优势和应用4.1 优势钻孔加工设备虚拟仿真控制系统具有以下几个优势:4.1.1 节省成本和时间通过虚拟仿真控制系统,操作人员可以在计算机上进行实验和调试,无需实际的物理设备和材料,从而避免了大量的实验成本和时间。
数控机床刀架虚拟装配仿真系统的设计与实现
数控机床刀架虚拟装配仿真系统的设计与实现虚拟装配系统以装配对象的三维实体模型为基础,在计算机上对装配操作的全过程进行仿真,真实地模拟和展示产品的相关特性。
虚拟装配系统的作用主要有:在设计和制造阶段,可以通过仿真环境优化产品设计,避免或减少产品实际加工中的反复试制或改进;在装配阶段,可以通过虚拟环境模拟装配过程,利用计算机对装配序列、装配路径的规划进行验证和纠错,从而降低装配成本;将虚拟装配与实际装配相结合,创建沉浸、半沉浸的虚拟环境,对于培训和教学而言,可以提高装配操作人员的工作效率。
数控机床刀架是数控车床的执行机构,是重要的功能部件,它在一定程度上标志着数控车床的技术水平,并且与加工精度和生产效率密切相关。
通过虚拟装配仿真系统可以更加安全、高效地掌握数控机床刀架的工作原理和装拆方法,对于数控机床的检测和故障维修具有重要意义。
LDB4数控机床刀架为经济型数控车床电动刀架,在加工制造业具有广泛的应用场合。
本文以LDB4数控机床刀架的虚拟仿真为背景,以虚拟装配培训为目标,利用虚拟现实技术原理,为产品装配过程的设计、规划和运动仿真分析构建一个实用的平台。
这个系统可通过人机交互的方式,对装配体进行模型展示、装配序列和装配路径的模拟,同时可结合分析验证装配序列的可行性与合理性。
1 系统功能模块及总体框架1.1 开发环境的选择EON Studio是一种虚拟现实环境生成工具,可以依据使用者的意图,研发实时3D应用程序。
本文选用VC++6.0与EON Studio相结合,进行交互式虚拟装配仿真系统的开发。
所设计的数控机床刀架虚拟装配系统,主要应用于教学,系统在满足虚拟装配仿真的基础上,易学易用,操作简便灵活,并具备可拓展的功能。
1.2 系统的构成构建虚拟仿真系统的主要任务是实现数控机床刀架三维可视化模型的展示,按照合理的装配序列和装配路径进行运动仿真和人机交互操作训练。
本文所建立的交互式虚拟装配仿真系统主要包括三维模型创建模块、模型导入模块、装配仿真模块、人机交互模块、功能集成模块。
基于SolidWorks的钻床分度工作台三维建模 与运动仿真

Mechanical Engineering and Technology 机械工程与技术, 2018, 7(1), 38-42Published Online February 2018 in Hans. /journal/methttps:///10.12677/met.2018.71005Three-Dimensional Modeling andSimulation Analysis of DrillingTable Based on SolidWorksXiangtong Yan1, Yandong Feng21School of Mechanical Engineering, Xi’an University of Science and Technology, Xi’an Shaanxi2People’s Government of Gulahema Town, Qira County, Hetian XinjiangReceived: Feb. 2nd, 2018; accepted: Feb. 19th, 2018; published: Feb. 27th, 2018AbstractAccording to the three-dimensional modeling software of SolidWorks, combined with the standard tool library Toolbox, the 3D model and its assembly model of each part of the drilling table are set up and the interference check is carried out. The motion simulation of the drilling table is carried out by using COSMOSMotion plug-in, and the rationality and scientific nature of each structure and working process are verified.KeywordsDrilling Machine, Indexing Table, SolidWorks, 3D Modeling, Simulation Analysis基于SolidWorks的钻床分度工作台三维建模与运动仿真闫向彤1,冯延东21西安科技大学机械工程学院,陕西西安2新疆策勒县固拉合玛镇人民政府,新疆和田收稿日期:2018年2月2日;录用日期:2018年2月19日;发布日期:2018年2月27日摘要钻床分度工作台是钻床必不可少的一部分,利用SolidWorks三维建模设计软件,结合标准件库Toolbox,闫向彤,冯延东建立钻床分度工作台各个零件的三维模型及其装配体模型,并进行干涉检查。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
配规 范了装 配工 艺 ,对 工作 台的后 续研发 具 有重 大 的意 义。 关键 词 :S o l i d w o r k s ;工作 台;虚拟 装 配 ;干 涉检 查 ;运动 仿真
中 图分类 号 :T G5 0 6 文 献标 识码 :A
我 国P C B 数 控 钻 床 目前 存 在 的 问 题 导轨 、直线 电机 、工作 台面 、导 轨 滑架 、 进 和优 化 。对于 动态 干涉 检查 ,可 以使 工 是 : (1 )零 件 的整 体 性 差 ,累 积 误 差 夹 紧装 置 、机 械手 、刀 具检 测装 置 、限位 作 台运 动到加 工 的两个 极 限位 置和 理论 位
需 要 对刀 具进 行检 测 和更换 。整 个 过程是
机 械 运动 、气 动 、电动 三者 相互 协 调的过 程 ,工 作 台和 钻孔 主轴 的精 确定 位 ,才 能 保 证钻 孑 L 精度。 2工作 台零件 的三维 实体 建模
器等 。其 中 ,标准 件 ( 比如 :圆柱销 和螺 置 ,进 行多 次工 作 台的来 回运 动 ,观察 其 栓 )可 以直 接 在T o o l b o x 插件 的标准库 中找 是 否出现 干涉 。 到 ,直接插 入而 不需要 建立模 型 。 4 工作 台运 动仿 真 3 工作 台虚拟 装配 为 了更 详 细 的 了解 工 作 台 的 运 动 情 在 完 成 工 作 台 零 部 件 模 型 后 ,根 据 况 ,可利 用 S o l i d w o r k s 中 的运 动算 例 功 能 零 部件 之 间 装配 约 束 关 系 ,在 S o l i d w o r k s 快 速 、简洁 地完 成工 作 台的仿 真运 动 。通 软件 中进 行虚 拟装 配 。在装 配 过程 中进行 过 添加 直线 马达 进行 驱动 来控 制工 作 台的 相应 的检 验 ,对不 合理 的装 配关 系进 行修 前 后运 动 ,通过设 定键 码 点 ,来确 定工 作 改 。在满 足性 能参 数 的条件 下 ,对 工作 台 台从一 个位 置 到另一 个位 置 的顺序 。运 动 进行 整体 评估 更改 ,实 现工 作 台在装 配 中 仿 真动 画制 作完 成后 ,可 查看 工作 台虚 拟 的高效 性 。 装 配体 的运 动效 果 。如果 运动 中观 察到 工 3 . 1 组 建工作 台装 配体 作 台存 在干 涉 ,则说 明工 作 台存在 缺 陷 , 装配体 的组 建是 虚拟 装配 过程 的核 心 可 以 回到静 态装 配体 中 ,对相 应 的零部 件 步骤 ,它 展示 了 工作 台的整 个 装配 过程 , 进 行更 改 ,完善 装配 体 。若确 认无 误 ,可 并 能根据 这个 过程 得 到装 配工 艺 。根据 装 将 动 画保 存 为A V I 格 式视 频 文件 ,方便 携 配 方 式 的 不 同 ,装 配 过 程 可 分 为 两种 : 带 、教学 与演 示等 。 是 自底 向上 ( d o w n — t 0 p ),二是 自顶 向 结 语 下 ( t o p — d o w n )。两种 装配 方式 优 缺点 各 利 用S o l i d w o r k s 软件 对P C B 数 控钻 床驱 在此 次 的虚拟 装 配过程 中 ,笔 者采 用 动 工 作 台进 行 虚 拟装 配 。基 于S o l i d w o r k s 两 种方 法相 结合 的方 式进行 装 配 。对于 能 软 件平 台 ,采 用合 理 的建 模方 法 ,快 速高 够 提高 工作 台性 能 ,尺寸 改动 范 围大 的零 效 构建 工作 台 三维模 型 ,通过 虚拟 装 配技 件 ,采用 自顶 向下 的装 配方 式 ,比如 :夹 术 ,实 现工 作 台整体 的正 确安 装 和拆卸 , 紧 装置 、机 械手 等 ;对于 固定 的 、不可 变 方 便技 术人 员 清楚 了解 工作 台 的结 构 和工 的零 件 以 自底 向上 的装 配方 法 ,比如 :底 作 原理 ,并 制定 相应 的装 配工 艺 。能适 时 座 、导轨 等 。本 文 中 ,由于工 作 台零件 很 地 、方 便 地 进行 修 改 替 换 和 制 定 装 配 工 多 ,装 配过 程复 杂 。实 际的工 作 台装配 体 艺 ,提 高装 配效 率 、缩 短装 配时 间 。很 大 分 为两个 步骤 :初 装 和总装 。即先 将一 些 程 度上 降低 了企 业研 发 和试验 成本 ,为产 零 部件 装成 子装 配体 完成初 装 ,然 后再 将 品研发 提供 了参考 依据 。 子 装配 体装 配成 整体 完成 总装 。 因此 ,在 参 考文 献 建 立 工 作 台 的装 配 体 时 ,先 建 立 子装 配 [ 1 ] 王冰 ,王 成 勇 ,汤 宏群 ,等 . 印刷 电路 体 ,再 建立 整体 装配 体 。为 了便 于观察 位 板 高速 数控 钻 床 的特 点 及 关键 技 术 f 7 ] . 工 置关 系 ,建模 后 可选 择爆 炸视 图对 装配 体 具技 术 ,2 0 0 9 ,4 3( 1 2 ):3 - 5 . 进行 全方位 观察 。 f 2 1 王 星 , 宋 富 民 ,等 . P C B数 控 钻 孔 机
大; ( 2 )单 一零 件 装 配后 达 不 到应 有 效 果 ,有些 无 法 装 配 。 ( 3 )结 构设 计 及 优 化 存在 着 一定 问题 。所 以 ,我 国的P C B 数 控 钻床 还需 要不 断 的改进 和 提高 。本 文基 于S o l i d w o r k s 软件 ,对 钻床 的工 作 台部 分 进 行虚 拟装 配 和运 动仿 真 。由此 ,可 以很 好 的 了解工 作 台的 装配关 系 、装 配信 息 、 装 配规 划 、装配 路径 、装 配 工艺 ,并规 范
对刀 具 的更换 和刀 具工 作情 况 的检 测 。光
栅 尺 位移传 感 器是 高精 度 的反馈 装置 ,观 察和 跟踪走 刀误 差 ,起 一个 补偿 刀具 误差
的作 用 。在 钻孔 过程 中 ,待 加 工 的P C B 板
由夹 紧装 置 固定 在 工作 台 面上 ,直线 电机
带 动 工 作 台面 在水 平 方 向 ( Y 轴 )做 往 复 运 动 。工作 台在移 动过 程 中配合 加工 主轴 对P C B 板进 行 钻孔 。在 钻 孑 L 时 ,根 据 加工
Q !
Q : Q i 2
高 新 技 术
Ne W T e c h n o l o z i e s a n d Pr o du c t s
基于S o l i d wo r k s P CB 数控 钻 床工作 台的虚拟 装 配 与运 动 仿 真
王 建 春 周 松 霖 王 晓 兵 。
( 1 . 四川科新机 电股份有 限公 司 ,四川 什邡 6 1 8 4 0 0 ;2 . 西华大学机械 工程 学院 ,四川 成都 6 1 0 0 3 9 ; 3 . 西南石 油大学机 电工程 学院,四川 成都 6 1 0 5 0 0)
摘 要 :基 于S o l i d w o r k s 软 件 平 台 ,建 J , - P C B 数 控 钻床 工作 台的三 维结 构模 型 ,并 对建好 的模 型进 行 虚拟 装 配。展 示 了工 作 台部 分各 零件 间 的装 配 关 系,利 用干 涉检查 和运 动仿 真 ,查 找虚 拟装 配体 中存 在 的 问题 ,改进 并 完善 装 配体 。虚拟 装
装 配过 程 。 1 工作 台的工作 原理
P C B 数 控钻 床 的工 作 台 ( Y 轴 )主要 由导 轨 、直 线 电 机 、工 作 台面 、夹 紧 机 构 、机 械手 、刀具 检测 装置 、光栅 尺 位移
传 感器 等 组成 。导 轨 的作用 是对 工作 台面 起 支撑 作用 ,并 控 制着 工作 台面 的水 平运 动方 向 。直 线 电机 是提 供工 作 台运动 的动 力 ,直 线 电机 直接 控 制着 整 个 工作 台Y 方 向的进 给 速度 、进 给加 速度 、定 位精 度 与 重 复 定位 精 度 。待加 工 的P C B 板上 安 装有 定 位 针 ,由工 作 台上安 装 的夹 紧机 构夹 紧 定 位 针 ,保 证P C B 板在 加 工过 程 中不 会偏 移 。机 械 手和 刀具 检测 装置 的作 用分 别是