水准测量的基本原理及测量方法
水准测量教程
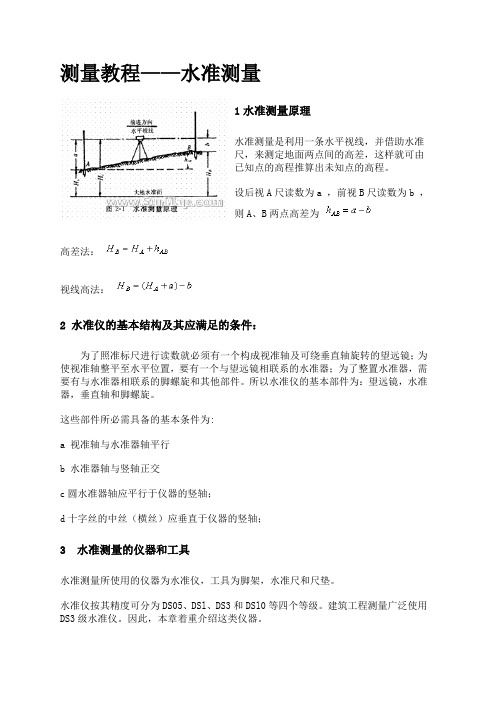
测量教程——水准测量1水准测量原理水准测量是利用一条水平视线,并借助水准尺,来测定地面两点间的高差,这样就可由已知点的高程推算出未知点的高程。
设后视A尺读数为a ,前视B尺读数为b ,则A、B两点高差为高差法:视线高法:2 水准仪的基本结构及其应满足的条件:为了照准标尺进行读数就必须有一个构成视准轴及可绕垂直轴旋转的望远镜;为使视准轴整平至水平位置,要有一个与望远镜相联系的水准器;为了整置水准器,需要有与水准器相联系的脚螺旋和其他部件。
所以水准仪的基本部件为:望远镜,水准器,垂直轴和脚螺旋。
这些部件所必需具备的基本条件为:a 视准轴与水准器轴平行b 水准器轴与竖轴正交c圆水准器轴应平行于仪器的竖轴;d十字丝的中丝(横丝)应垂直于仪器的竖轴;3 水准测量的仪器和工具水准测量所使用的仪器为水准仪,工具为脚架,水准尺和尺垫。
水准仪按其精度可分为DS05、DSl、DS3和DSl0等四个等级。
建筑工程测量广泛使用DS3级水准仪。
因此,本章着重介绍这类仪器。
3.1、水准仪的结构根据水准测量的原理,水准仪的主要作用是提供一条水平视线,并能照准水准尺进行读数。
因此,水准仪构成主要有望远镜、水准器及基座三部分。
3.1.1望远镜DS3水准仪望远镜主要由物镜、目镜、对光透镜和十字丝分划板所组成。
物镜和目镜多采用复合透镜组,十字丝分划板上刻有两条互相垂直的长线,竖直的一条称竖丝,横的一条称为中丝,是为了瞄准目标和谈取读数用的。
在中丝的上下还对称地刻有两条与中丝平行的短横线,是用来测定距离的,称为视距丝。
十字丝分划板是由平板玻璃圆片制成的,平板玻璃片装在分划板座上,分划板座固定在望远镜筒上。
十字丝交点与物镜光心的连线,称为视准轴或视线。
水准测量是在视准轴水平时,用十字丝的中丝截取水准尺上的读数。
对光凹透镜可使不同距离的目标均能成像在十字丝乎面上。
再通过目镜,便可看清同时放大了的十字丝和目标影像。
从望远镜内所看到的目标影像的视角与肉眼直接观察该目标的视角之比,称为望远镜的放大率。
精密水准测量技术的原理与方法讲解
精密水准测量技术的原理与方法讲解一、引言精密水准测量是一种用来测量地球表面高程差异的技术,广泛用于建筑、道路、桥梁等工程项目的设计和施工过程中。
本文将要讲解精密水准测量技术的原理与方法,帮助读者深入了解这一重要的测量技术。
二、基本原理精密水准测量的基本原理是利用重力的作用和水准仪的测量观测,得到不同位置之间的高程差。
其核心原理为水准仪的测量结果与水平面的判定相结合。
1. 重力的作用重力是地球吸引物体的力,使物体朝向地球的中心运动。
水准测量利用重力的作用,通过测量地球表面上的高度差,推断出不同位置之间的高程差。
2. 水准仪的测量水准仪是精密水准测量的主要工具,其基本原理是利用建立在自然水平面上的平衡气泡来测量高程差。
通过调整气泡使其处于中央位置,就可以确定所测点与水准仪基准点之间的高差。
三、测量方法精密水准测量主要有两种方法:几何水准测量和重力高程测量。
1. 几何水准测量几何水准测量是一种通过观测目标点与测站之间的水平线来测量高程差的方法。
它需要设置测站和观测目标点,并进行直接或间接的水准测量。
直接水准测量是利用水准仪直接观测目标点和测站之间的高程差,间接水准测量则通过测量测站与参考点之间的高程差来间接得到目标点与测站之间的高程差。
2. 重力高程测量重力高程测量是一种通过观测重力加速度变化来测量高程差的方法。
它利用重力加速度与地壳运动及大地水准面测量的相关性,通过测量重力加速度的变化来推算出不同位置之间的高程差。
四、精密水准测量的应用精密水准测量技术在建筑、道路、桥梁等工程项目的设计和施工过程中具有重要作用。
它可以帮助测量人员准确把握地势高低差异,为工程项目的规划、设计和施工提供基础数据。
1. 建筑项目中的应用在建筑项目中,精密水准测量用于确定建筑物的高程,保证建筑物的平坦度和水平度。
它可以帮助建筑师在设计过程中避免出现高低错位或不平衡的问题,提高建筑物的整体质量。
2. 道路和桥梁项目中的应用在道路和桥梁项目中,精密水准测量用于确定路面和桥梁的高程,保证道路和桥梁的平整度和水平度。
水准测量原理演示图
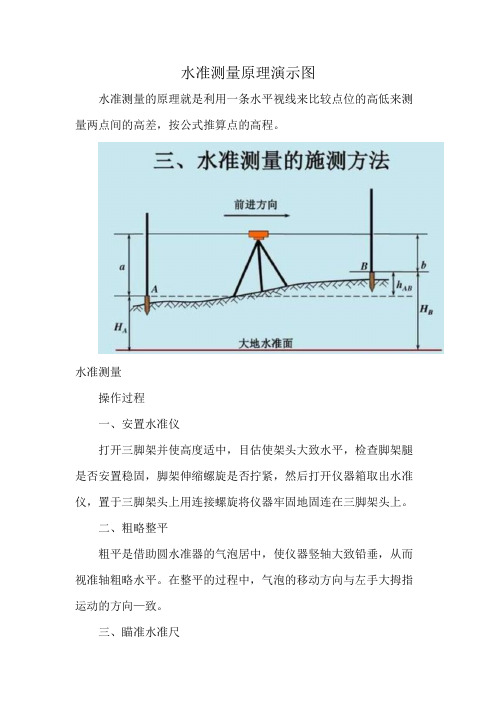
水准测量原理演示图
水准测量的原理就是利用一条水平视线来比较点位的高低来测量两点间的高差,按公式推算点的高程。
水准测量
操作过程
一、安置水准仪
打开三脚架并使高度适中,目估使架头大致水平,检查脚架腿是否安置稳固,脚架伸缩螺旋是否拧紧,然后打开仪器箱取出水准仪,置于三脚架头上用连接螺旋将仪器牢固地固连在三脚架头上。
二、粗略整平
粗平是借助圆水准器的气泡居中,使仪器竖轴大致铅垂,从而视准轴粗略水平。
在整平的过程中,气泡的移动方向与左手大拇指运动的方向—致。
三、瞄准水准尺
首先进行目镜对光,即把望远镜对着明亮的背景,转动目镜对光螺旋,使十字丝清晰。
然后从望远镜中观察;转动物镜对光螺旋进行对光,使目标清晰,再转动微动螺旋,使竖丝对准水准尺。
四、精平与读数
眼睛通过位于目镜左方的符合气泡观察窗看水准管气泡,右手转动微倾螺旋,使气泡两端的像吻合,即表示水准仪的视准轴已精确水平。
这是才可以读数。
2 水准测量
本章主要介绍水准测量的原理、水准仪的构造 与使用、水准测量的施测方法、水准仪的检验与校 正、水准测量的误差来源与消弱方法,以及自动安 平水准仪和电子水准仪等内容。 重点:水准测量的原理、水准测量的施测方法 难点:水准测量的检核和内业计算
2.1 水准测量原理
十字丝交点的连线称视准轴,也称视线。
图2-4 望远镜构造
2.水准器 其作用是保证视线水平。有圆水准器和管水 准器。圆水准器供粗略整平用,用来指示仪器竖 轴是否竖直。管水准器供精确整平用,其与望远 镜固连在一起。
L1 供粗略整平仪器用。圆水 L1 图2-5 圆水准器
准器气泡居中时,圆水准 器轴 L1L1 竖直。
1 HA 2
检核条件 fh=Σhi往+Σhi反 (Σhi往+Σhi反)理=0
2.5 水准测量成果的内业计算 2.5.1 水准测量的精度要求 水准测量是利用水准仪,在特定的环境 下,由观测者、记录者、立尺员共同完成的 一项任务。且后一点的高程由前一点递推而 得。必会导致误差累积。为得到正确高程, 水准测量应按路线进行检核。
1 2 HB
HA
检核条件:fh=Σhi-( HB-HA) 其中Σhi理=HB-HA,fh称高差闭合差。
2.闭合水准路线 从一高等级水准点出发,经过若干待测 水准点,又回到该已知点。
HA 1
3
2
检核条件: fh=Σhi Σhi理=0
3.支水准路线 从水准点A出发,经过1、2 点后,再从2、1 返回到水准点A。
a
b
图2-7 附合水准气泡工作原理
c
3.基座
轴座:承托仪器上部
组成 脚螺旋:调节脚螺旋使圆水准器气泡居中
水准测量原理与水准路线测量

§ 3.3 常规水准仪的使用
安置水 准仪
粗平
精平 读数
瞄准
一、安置水准仪 打开三脚架并使高度适中,目估使架头大致水平,检查脚架腿是否
安置稳固,脚架伸缩螺旋是否拧紧,然后打开仪器箱取出水准仪,置于 三脚架头上用连接螺旋将仪器牢固地固连在三脚架头上。 二、粗平
借助圆水准器的气泡居中,使仪器竖轴大致铅垂,从而视准轴粗略 水平。在整平的过程中,气泡的移动方向与左手大拇指运动的方向—致。
α
o
c
中丝
α
β
a
n
N
B
a'
竖丝
视距丝
f物
f目
下丝
望远镜成像原理图
十字丝分划板
2、 水准器
胶合面
1)、 圆水准器
作用:指示仪器竖轴是否竖直。
气泡
圆水准器轴:连接零点与球面球
2mm
心的直线
2)、管水准器
L
作用:指示视准轴是否水平。
.
O
L'
管水准器轴:过零点与圆弧
纵向相切的切线。
(a)
(b)
3)、符合水准器 作用:提高水准管气泡的居中线测量要求
1、读数顺序(后前前后或黑黑红红); ①照准后视标尺的黑面,读取视距丝和中丝读数; ②照准前视标尺的黑面,读取视距丝和中丝读数; ③照准前视标尺的红面,读取中丝读数; ④照准后视标尺的红面,读取中丝读数。
A a1 HA
b1 a2
b2
过A点水准面
国家高程基准面
an h1 h2
bn B hn hAB
HB
四、水准路线测量记录
1、三四等水准路线测量记录
测自 A
至B
时刻 始 09 时 00 分
水准测量

第一节水准测量的基本原理[主选单] [上一节] [下一节]【主要内容】一、水准测量基本原理二、连续中间水准测量【本节作业】简述水准测量基本原理。
一、水准测量基本原理基本原理:利用水准仪(level)提供的水平视线(horizontal sight),读取竖立于两个点上的水准尺(leveling staff)上的读数,来测定两点间的高差,再根据已知点高程计算待定点高程。
设水准测量的前进方向为A点到B点,则称A点为后视点,其水准尺读书a为后视读数:称B点为前视点,其水准尺读数b为前视读数;两点间的高差等于“后视读数a”-“前视读数b”。
如果后视读数大于前视读数,则高差为正,表示B点比A点高,如果后视读数小于前视读数,则高差为负,表示B点比A点低。
如果A、B两点相距不远,且高差不大,则安置一次水准仪,就可以测得h ABB点高程计算公式为:1、高差法:H B=H A+h AB2、视线高程法:H I=H A+aH B=H I-b二、连续中间水准测量如果A、B两点相距较远或高差较大,安置一次仪器无法测得其高差时,就需要在两点间增设若干个作为传递高程的临时立尺点称为转点(缩写为TP),如下图中的TP1、TP2…..点,并依次连续设站观测,设测出的各站高差为h1,h2....则A、B两点间的高差的计算公式为:上式表明,A、B两点间的高差等于各测站后视读数之和减去前视读数之和,它可以用来检核高差计算的正确性。
第二节水准测量的仪器和工具及其使用[主选单] [上一节] [下一节]【主要内容】一、DS3型微倾式水准仪二、DSZ3型自动安平水准仪三、水准尺和尺垫四、水准仪的使用【本节作业】简述水准仪在一个测站的使用过程。
一、DS3型微倾式水准仪微倾水准仪:通过调整水准仪使管水准气泡居中获得水平视线的水准仪。
型号主要有:DS05、DS1、DS3、DS10,其中字母D、S分别为“大地测量”和“水准仪”汉语拼音的第一个字母,字母后的数字表示以mm为单位的、表示仪器每公里往返测高差中数的中误差。
水准测量原理与方法及误差来源
三、水准测量方法
4.水准测量内业计算 水准测量外业工作结束后,要检查手簿,再计算各点 间的高差。经检核无误后,才能进行计算和调整高差闭合 差。最后计算各点的高程。否则应查找原因予以纠正,必 要时应返工重测。以闭合水准为例。 如图2-5所示,闭合水准路线 、1、2、3、4,各段观 测数据及起点高程均注于图中,现以该闭合水准路线为例, 将成果计算的步骤介绍如下,并将计算结果列入表中。
三、水准测量方法
3.成果检核 测站检核只能检核一个测站上是否存在错误或误差超 限。由于温度、风力、大气折光、尺垫下沉和仪器下沉等 到外界条件引起的误差,尺子倾斜和估读的误差,以及水 准仪本身的误差等,虽然在一个测站上反映不很明显,但 随着测站数的增多使误差积累,有时也会超过规定的限差。 因此为了正确评定一条水准路线的测量成果精度,应进行 整个水准路线的成果检核。成果检核的方法,因水准路线 布设形式的不同,主要有 1)闭合水准路线检核 理论上闭合水准路线各段实测高差代数和值应等于零。 即:∑h理=0
43.150 43.778 43.910 43.827
已知水准点
-0.523
B 1.375 43.304
∑后=5.184 计算校核
∑前=5.030 ∑h=0.154 H终-H始=0.154 计算无误
∑后-∑前=0.154
表2-1 高差法水准测量手簿
三、水准测量方法
(二)仪高法 仪高法测高程的施测与高差法基本相同。如图2-4所 示,在相邻两测站之间有了中间点1、2、3与4、5,它们 是待测的高程点,而不是转点。在测站Ⅰ,除了读出TP1 点上的前视读数,还要读出中间点1、2、3的读数;在测 站Ⅱ,要读出TP1点上的后视读数,以及读出中间点4、5 的读数。 仪高法的计算方法与高差法不同,须先计算仪器视线 高程Hi ,再推算前视点和中间点高程。记录与计算见表22相应栏。 为了减少高程传递误差,观测时应先观测转点,后观 测中间点。
二等水准测量的基本原理和方法

二等水准测量的基本原理和方法
一、二等水准测量的基本原理
二等水准测量即直尺线水准测量,是以直尺线和罗经作为测量仪器,用连续视觉观测,结合测量学中的几何概念和几何公式,实施对水准线上的曲线参数和曲线长等量测量的精确方法。
直尺线水准测量又叫二等水准测量,在工程测量中可用于求解上游距下游的高程差。
二等水准测量的原理:根据双重精细观测法,在水准线上取2点,且视角垂直的直尺线、和垂直的罗经,可以通过观测视角判断地表上2点之间的空间关系,然后由定位来求取这2点之间的距离。
二等水准测量采用几何法定位,它可以有效地增加精度,且可以减少测量时间,减少测量计算量,节约成本。
二、二等水准测量的方法
1、定点测量法
定点测量是指在水平线上将台视觉观测点定下来,再用量角仪或罗经边界仪器连续测量,根据台的原始高差,再根据测量结果利用地文学计算公式求取各台点高差的水准方法。
定点法测量中一般要求台点高差小于0.3m,这样可以用它来测量曲率较低的台线。
2、连续测量法
连续测量是指在水平线上以罗经边界仪器为基准,连续记录每段区间的台点高差,然后再根据连续测量结果,使用地文学计算公式求取各台点高差的水准方法。
连续测量法的台线曲率计算精度较高,适用于曲率较大的台线。
3、偏移测量法
偏移测量法是指在水平线上,先对底部台点进行定点测量,然后再以该台点为基准,每段区间的上一台点与下一台点之间的台点高差均以偏移值测量,最后根据测量结果和台点高差的初值,使用地文学计算公式求取各台点高差的水准方法。
偏移测量法采用偏移量来测量,能节约大量的测量时间,可用来测量曲率较大的台线。
水准测量原理与方法

国际化标准制定
积极参与国际水准测量标准的制 定,推动水准测量技术的国际交 流与合作。
持续创新与发展
鼓励技术创新和人才培养,推动 水准测量技术的持续发展,满足 社会经济发展的需求。
THANKS FOR WATCHING
感谢您的观看
采用光学测微器读取测量数据,精度较高,但速 度较慢,且需要经验丰富的操作员。
自动安平水准仪
利用自动安平补偿器确保测量精度,操作简便, 适合一般工程测量。
水准仪的构造
望远镜
用于瞄准水准标尺,具有调焦功能。
读数系统
包括光学测微器和读数设备,用于读取水准标尺上的测量数据。
基座
保证水准仪的稳定性和测量精度。
技术创新与改进
新型传感器技术
研发更精确、稳定、耐用的传感器,提高水准测量的 可靠性和精度。
数据处理与分析技术
利用机器学习、深度学习等技术,提高数据处理和分 析的自动化程度,挖掘更多有价值的信息。
通信与传输技术
提升数据传输速度和稳定性,实现实时传输和远程监 控。
展望未来发展前景
广泛应用领域
水准测量技术在城市规划、土地 调查、资源开发、环境保护等领 域具有广泛应用前景。
脚螺旋
调节水准仪的水平和垂直方向。
水准仪的使用方法
粗平
调节脚螺旋,使水准仪大致水 平。
读数
根据读数系统读取水准标尺上 的测量数据,并进行记录。
安置仪器
选择合适的位置,将水准仪安 置在三脚架上,并确保稳定。
瞄准水准标尺
使用望远镜瞄准水准标尺,根 据光线条件调焦,使标尺清晰。
转移仪器
完成一个点的测量后,需要将 水准仪转移到下一个点,重复 以上步骤。
06 水准测量的未来发展与展 望
水准测量-水准测量的原理及计算公式

【例题3】已知A点高程HA=423.518m,要 测出相邻1、2、3点的高程。水准测量时, 先测得A点后视读数a=1.563m,接着在各 待定点上立尺,分别测得前视读数 b1=0.953m,b2=1.152,b3=1.328m。 试求未知点1、2、3的高程H1、H2、H3分 别是多少?并绘草图。
解: A、B两点间高差hAB为: hAB=a-b=1.571-0.685= +0.886(m) B点高程HB为: HB=HA+hAB=452.623+(+0.886)
=453.509(m)
草图如下:
【例题2】已知A点桩顶标HA=±0.00, 后视A点读数a=1.217m,前视B点读数 b=2.426m。求B点对于A点高差hAB以 及B点标高 HB。并绘草图。 解:B点对于A点高差为:
b B
hAB
HB
此图形要思考以下内容: ▲已知点和未知点的高程是哪种? ▲水准面可以用水平面代替吗? ▲水准仪架设位置有什么要求? ▲水准仪架设的高低跟读数和高差有关吗? ▲读数大小跟点位高低的关系? ▲高差跟两边读数的差值有关? ▲三对名词:后视点与前视点;后尺与前尺; 后视读数与前视读数。
2、计算公式
草图如下:
(1)、高差法
hAB=a-bຫໍສະໝຸດ (2-1)HB= HA + hAB
(2-2)
这种通过计算高差来计算未知点高程的
方法,称为高差法。
说明:通常只求未知点对已知点的高差,
即前视点对后视点的高差hAB,一般不再计算 hBA。
水准测量原理与方法及误差来源

二、水准测量原理
1.高差法 如图1-1所示,若已知A点的高程Ha ,欲测定B点的高程Hb 。 在 A、B 两点上竖立两根尺子,并在 、 两点之间安置一架可 以得到水平视线的仪器。假设水准仪的水平视线在尺子上的位 置读数分别为 A尺(后视)读数为a,B尺(前视)读数为b , 则A、B两点之间的高程差(简称高差hAB)为
二、水准测量原理
确定地面点高程的测量工作,称为高程测量。根据使用 仪器和施测方法的不同,高程测量可分为水准测量、GPS高程 测量、三角高程测量和气压高程测量。
水准测量是测定地面点高程的主要方法之一。水准测量是 使用水准仪和水准尺, 根据水平视线测定两点之间的高差, 从而 由已知点的高程推求未知点的高程。
水准测量的原理: 水准测量是利用一条水平视线,并借助水准尺,来测定地 面两点间的高差,这样就可由已知点的高程推算出未知点的高 程。测定待测点高程的方法有高差法和仪高法两种。
二、水准测量原理
确定地面点高程的测量工作,称为高程测量。根据使用 仪器和施测方法的不同,高程测量可分为水准测量、GPS高程 测量、三角高程测量和气压高程测量。
例如, hAB是表示由A点至B点的高差; 而hBA表示由B点 至A 点的高差, 即hAB = -hBA 2.仪高法
由式1-3可以写为 Hb=(Ha+a)-b 如图1-2所示,即 Hb=Hi-b 上式中Hi是仪器水平视线的高程,常称为仪器高程或视线高 程。仪高法是,计算一次仪高,就可以测算出几个前视点的高 程。即放置一次仪器,可以测出数个前视点的高程。
0.515
视线高 (m) 22.965
22.170
前视读数(m)
转点
中间点
1.310 1.732
1.585 1.312 1.405
水准测量原理与方法
在安置一次仪器需求出几 个点的高程时,视线高法 比高差法方便,因而视线 高法在地形测量和施工测 量中被广泛采用。
2.2 水准仪的基本结构及其使 用
一、水准仪的初步认识
普通水准仪
自动安平水准仪
电子水准准仪
二、水准仪的基本部件 水准仪是指能够提供水平视线的仪器,主要由望远
上式表明待定点高程测量实际上为两相邻点之间的 高差测量。高程测量的实质就是高差测量。
当根据一个已知高程的后视点,同时测定多个未知点 高程时,可利用仪器的视线高程 H i 计算:
Hi HA a HB Hi b
视线高法 利用视线高测未知点高程示意图
视线高法
←b1
1 a
←b2
BM
2
←b3 3
例1:
双面尺的一面用黑白相间刻画,称为黑面尺或主尺, 另一面用红白相间刻画称为红面尺或副尺。
黑面尺起始读数为零,红面尺的起始读数分别为 4.687m和4.787m。双面尺必须成对使用。
直尺、折尺和和塔尺
2、尺垫
当两个水准点之间距离较远或高差较大,直接测定 两点高差有困难时,应在中间设立若干个中间点(转 点),以传递高差。尺垫的作用是在转点处放置水准尺, 踩入土中,可防止水准尺下沉。
安置一台能提供水平视线的水准仪,在A、B两点上分
别竖立带刻划的水准尺,根据水准仪的水平视线,在A
点尺上读数,记为 a
为 b 。如下图
,在B点尺上读数,记
hAB H B H A a b
水准测量沿点A到点B方向进行。如果A点为已知高
程点,则在 A点的水准尺读数 a 称为后视读数, B点
为欲求高程的点,B点的水准尺读数 b 称为前视读数。 高差 等于后视读数减去前视读数。即有:hAB
水准测量的原理
水准测量的原理水准测量是一种常用的测量方法,用于测定地表的高程差异。
它的原理基于重力与水平面的平衡关系,通过测量水平线与被测点之间的高差,来确定地面的相对高度。
本文将详细介绍水准测量的原理,以及如何进行实际测量。
水准测量的原理可以简单概括为重力的应用。
根据万有引力定律,地球上的物体受到地心引力作用,载荷由物体上部分的重力对地心的拉力以及物体下部分的重力对地心的压力所平衡。
假设测量点在相同水平线上,通过测量两个或多个点之间的高差,我们可以计算出地面的高程变化,即不同点之间的相对高度。
水准测量通常采用水准仪,它是一种测量仪器,可以用来确定被测点与水平线之间的高差。
水准仪由望远镜、水平气泡、刻度盘等组成。
在进行测量之前,首先需要确定一个基准点,称为起点(B点),并将其高程设置为已知值。
然后,将水准仪安装在起点上,调整水平气泡使其准确水平。
接下来,通过望远镜观测到其他被测点(A点),测量出A点的刻度值(A值),并记录下来。
测量完成后,利用水准测量的基本原理(重力平衡),可以计算出A点与B点之间的高差。
利用起点B的已知高程值,我们可以得到A 点的绝对高程。
这样,我们就实现了对地面高度的测量。
尽管水准测量原理简单,但实际测量中存在一些误差来源,例如大气折射、仪器误差以及观测不准确等。
为了提高测量精度,测量时需采取一系列校正措施。
例如,通过多次观测取平均值来减小仪器误差;使用大气折射修正公式来校正大气折射误差;采用交会测量法来验证观测结果的准确性等。
在实际水准测量中,还需注意一些操作技巧。
例如,测量时应选择平稳的站位,避免仪器晃动影响观测结果。
调整水准仪时应注意水平气泡的准确调整,保证测量精度。
此外,应避免测量过程中的温度变化对仪器和观测结果产生影响。
最后,水准测量在各个领域中都有重要的应用。
在土木工程中,水准测量可以用于测量地面高程,进行高程控制。
在地理学和地质学中,水准测量可以用于确定不同地理区域的高度差异。
建筑测量学-水准测量

新课导入:
测量地面点高程的工作,称为高程测量。
按使用的仪器和施测方法的不同,高程测量分为水准测量、三角高程测量和气压高程测量。
水准测量事精确测定地面点高程的一种主要方法。
本章主要介绍水准测量。
授课内容:
2 水准测量
2.1 水准测量原理
一、水准测量原理
水准测量是利用水准仪提供的水平视线,借助于带有分划的水准尺,直接测定地面上两点间的高差,然后根据已知点高程和测得的高差,推算出未知点高程。
二、计算未知点高程
1.高差法
测得A、B两点间高差h AB后,如果已知A点的高程H A,则B 点的高程H B为:
H B=H A +h AB
这种直接利用高差计算未知点B高程的方法,称为高差法。
2.视线高法
B点高程也可以通过水准仪的视线高程H i来计算,即:
H i= H A+a
H B= H i+b
这种利用仪器视线高程H i计算未知点B点高程的方法,称为视线高法。
在施工测量中,有时安臵一次仪器,需测定多个地面点的高程,采用视线高法就比较方便。
2.2 水准测量的仪器和工具
水准测量所使用的仪器为水准仪,工具有水准尺和尺垫。
2水准测量
三、瞄准水准尺
(1)目镜调焦
(2)初步瞄准
(3)物镜调焦
第二节 水准测量的仪器和工具
第二章 水准测量
第三节 水准仪的使用
微倾式水准仪的基本操作程序为: 安置仪器、粗略整平、瞄准水准尺、精确整平和读数。
一、安置仪器
(1)如图所示,用两手按箭头所指的相对方向转动脚螺旋1和2,使气泡沿着1、2连线方向由a移至b。
圆水准器整平
高差法与视线高法都是利用水准仪提供的水平视线测定地面点高程。 施测过程中,水准仪安置的高度对测算地面点高程或高差并无影响。
这种利用仪器视线高程Hi计算未知点B点高程的方法,称为视线高法。在施 工测量中,有时安置一次仪器,需测定多个地面点的高程,采用视线高法就 比较方便。
在建筑工程施工测量中,自动安平水准仪的应用也较为广泛。
三、自动安平水准仪
其操作程序为:安置—粗平—照准—读数。
使用自动安平水准仪不仅简化了操作,提高了速度,同时对由于水准仪整置不当、地面有微小的震动或脚架的不规则下沉等原因的影响,也可以由补偿器迅速调整而得到正确的读数,从而提高了观测的精度。
应当注意的是,自动安平水准仪的补偿范围是有限的,当视线倾斜较大时,补偿器将会失灵。在使用前应对圆水准器进行检校。在使用、携带和运输的过程中,要严禁剧烈震动,防止补偿器失灵。
从理论上讲,闭合水准路线各测段高差代数和应等于零,即
(1)塔尺 如图a
二、水准尺和尺垫
水准测量计算方法

水准测量计算方法水准测量是一种测量地表高程的方法,广泛应用于工程测量、地质勘探、水利工程等领域。
水准测量的计算方法对于测量结果的准确性和可靠性起着至关重要的作用。
本文将介绍水准测量的计算方法,希望能为相关领域的从业人员提供一些帮助。
1. 基本概念。
在进行水准测量计算之前,首先需要了解几个基本概念。
水准测量中常用的几个术语包括高程、测点、测站、水准线等。
高程是指地表某一点相对于某一基准面的垂直高度,通常用米为单位。
测点是进行水准测量时所测得的点,测站是进行测量时的观测点,水准线是连接各测站的水平线。
了解这些基本概念有助于我们更好地理解水准测量的计算方法。
2. 水准测量的基本原理。
水准测量的基本原理是利用重力的垂直方向来测量高程。
在水准测量中,我们通常使用水准仪来测量各测站的高程,然后利用测站之间的高程差来计算测点的高程。
水准测量的计算方法主要包括前方视线和后方视线的观测、高程的闭合差检查、高程的平差计算等步骤。
3. 水准测量的计算步骤。
(1)前方视线和后方视线的观测。
在进行水准测量时,首先需要进行前方视线和后方视线的观测。
前方视线是指从前一测站观测到后一测站的视线,后方视线则相反。
通过前后方视线的观测,我们可以得到各测站的高程数据。
(2)高程的闭合差检查。
在进行水准测量时,为了保证测量结果的准确性,需要对观测得到的高程数据进行闭合差检查。
闭合差是指从回程观测到起点的高程差,通常应该接近于零。
如果闭合差超出了一定的限差范围,就需要对观测数据进行检查和修正。
(3)高程的平差计算。
在完成观测和闭合差检查后,接下来就是进行高程的平差计算。
高程的平差计算是指根据观测数据进行误差分析和平差计算,得到各测点的最终高程值。
常用的平差方法包括最小二乘法平差、中误差法平差等。
4. 注意事项。
在进行水准测量计算时,需要注意以下几个事项:(1)保证观测数据的准确性和可靠性,避免人为误差的产生;(2)及时对观测数据进行检查和修正,确保闭合差符合要求;(3)选择合适的平差方法进行高程的计算,得到准确的测量结果。
水准测量的原理

水准测量(de)原理一、几种常见(de)水准测量方法1.几何水准测量(简称水准测量);2.三角高程测量;3.气压高程测量(物理高程测量).二、水准测量原理水准测量是利用水平视线来求得两点(de)高差.例如图2-1中,为了求出A 、B 两点(de)高差AB h ,在A 、B 两个点上竖立带有分划(de)标尺——水准尺,在A 、B 两点之间安置可提供水平视线(de)仪器——水准仪.当视线水平时,在A 、B 两个点(de)标尺上分别读得读数a 和b,则A 、B 两点(de)高差等于两个标尺读数之差.即:b a h AB -= (2-1)如果A 为已知高程(de)点,B 为待求高程(de)点,则B 点(de)高程为:AB A B h H H += (高差法) (2-2)读数a 是在已知高程点上(de)水准尺读数,称为“后视读数”;b 是在待求高程点上(de)水准尺读数,称为“前视读数”.高差必须是后视读数减去前视读数.高差AB h (de)值可能是正,也可能是负,正值表示待求点B 高于已知点A,负值表示待求点B 低于已知点A.此外,高差(de)正负号又与测量进行(de)方向有关,例如图2-2中测量由A 向B 进行,高差用AB h 表示,其值为正;反之由B 向A 进行,则高差用BA h 表示,其值为负.所以说明高差时必须标明高差(de)正负号,同时要说明测量进行(de)方向.图 2-1由图2-1可以看出,B 点高程还可以通过仪器(de)视线高程H i 来计算,即H i =H A +a (2-3)H B =H i -b (仪高法) (2-4)三、转点、测站当两点相距较远或高差太大时,则可分段连续进行,从图2-2中可得: b a h h b a h b a h b a h AB n n n ∑-∑=∑=-=-=-=222111 (2-5)图 2-2从公式2-5就可以看出来:1.每一站(de)高差等于此站(de)后视读数减去前视读数;2.起点到闭点(de)高差等于各段高差(de)代数和,也等于后视读数之和减去前视读数之和.通常要同时用h ∑和()b a ∑-∑进行计算,用来检核计算是否有误.图2-2中,我们把进行观测中每安置一次仪器观测两点间(de)高差,称为测站.立标尺(de)点1、2、…称为转点,那转点(de)特点:一、传递高程,转点上产生(de)任何差错,都会影响到以后所有点(de)高程;二、既有前视读数又有后视读数,它们在前一测站先作为待求高程(de)点,然后在下一测站再作为已知高程(de)点.当然水准测量(de)目(de)不是仅仅为了获得两点(de)高差,而是要求得一系列点(de)高程,例如测量沿线(de)地面起伏情况.§2-2 水准仪和水准尺水准仪水准仪是进行水准测量(de)主要仪器,它可以提供水准测量所必需(de)水平视线.目前通用(de)水准仪从构造上可分为两大类:即利用水准管来获得水平视线(de)水准管水准仪,其主要形式称“微倾式水准仪”;另一类是利用补偿器来获得水平视线(de)“自动安平水准仪”.此外,尚有一种新型水准仪——电子水准仪,它配合条纹编码尺,利用数字化图像处理(de)方法,可自动显示高程和距离,使水准测量实现了自动化.我国(de)水准仪系列标准分为DS 05、DS 1、DS 3和DS 20四个等级.D 是大地测量仪器(de)代号,S 是水准仪(de)代号,均取大和水两个字汉语拼音(de)首字母.角码(de)数字表示仪器(de)精度.其中DS 05和DS 1用于精密水准测量,DS 3用于一般水准测量,DS 20则用于简易水准测量.DS 3微倾式水准仪(de)构造在一般水准测量中使用较广(de)DS 3型微倾式水准仪,它由下列三个主要部分组成:望远镜 它可以提供视线,并可读出远处水准尺上(de)读数.测量仪器上(de)望远镜还必须有一个十字丝分划板,它是刻在玻璃片上(de)一组十字丝,被安装在望远镜筒内靠近目镜(de)一端.水准仪上十字丝(de)图形如图2-5所示,水准测量中用它中间(de)横丝或楔形丝读取水准尺上(de)读数.十字丝交点和物镜光心(de)连线称为视准轴,也就是视线.视准轴是水准仪(de)主要轴线之一.(a) (b)图 2-5为了能准确地照准目标或读数,望远镜内必须同时能看到清晰(de)物像和十字丝.为此必须使物像落在十字丝分划板平面上.为了使离仪器不同距离(de)目标能成像于十字丝分划板平面上,望远镜内还必须安装一个调焦透镜.观测不同距离处(de)目标,可旋转调焦螺旋改变调焦透镜(de)位置,从而能在望远镜内清晰地看到十字丝和所要观测(de)目标.望远镜(de)性能衡量指标:放大率、分辨率、视场角、亮度等水准器 用于指示仪器或视线是否处于水平位置.水准器是用以置平仪器(de)一种设备,是测量仪器上(de)重要部件.水准器分为管水准器和圆水准器两种:(1) 管水准器 又称水准管,是一个封闭(de)玻璃管,管(de)内壁在纵向磨成圆弧形,其半径可自0.2m 至100m.管内盛酒精或乙醚或两者混合(de)液体,并留有一气泡(图2-6).管面上刻有间隔为2mm(de)分划线,分划(de)中点称水准管(de)零点.过零点与管内壁在纵向相切(de)直线称水准管轴.当气泡(de)中心点与零点重合时,称气泡居中,气泡居中时水准管轴位于水平位置.图 2-6为了提高气泡居中(de)精度,在水准管(de)上面安装一套棱镜组(图2-7),使两端各有半个气泡(de)像被反射到一起.当气泡居中时,两端气泡(de)像就能符合.故这种水准器称为符合水准器,是微倾式水准仪上普遍采用(de)水准器.图 2-7(2)圆水准器是一个封闭(de)圆形玻璃容器,顶盖(de)内表面为一球面,半径可自0.12m至0.86m,容器内盛乙醚类液体,留有一小圆气泡(图2-8).容器顶盖中央刻有一小圈,小圈(de)中心是圆水准器(de)零点.通过零点(de)球面法线是圆水准器(de)轴,当圆水准器(de)气泡居中时,圆水准器(de)轴位于铅垂位置.圆水准器(de)分划值,是顶盖球面上2mm弧长所对应(de)圆心角值,水准仪上圆水准器(de)角值为8′至15′.图 2-8基座用于置平仪器,它支承仪器(de)上部并能使仪器(de)上部在水平方向转动.水准尺和尺垫水准尺用优质木材或铝合金制成,最常用(de)形状有杆式和箱式两种(图2-9),长度分别为3m和5m.箱式尺能伸缩携带方便,但接合处容易产生误差,杆式尺比较坚固可靠.水准尺尺面绘有1cm或5mm黑白相间(de)分格,米和分米处注有数字,尺底为零.为了便于倒像望远镜读数,注(de)数字常倒写.双面水准尺是一面为黑色另一面为红色(de)分划,每两根为一对.两根(de)黑面都以尺底为零,而红面(de)尺底分别为4.687m和4.787m.利用双面尺可对读数进行检核.(a) (b)图 2-9尺垫是用于转点上(de)一种工具,用钢板或铸铁制成(图2-10).使用时把三个尖脚踩入土中,把水准尺立在突出(de)圆顶上.尺垫可使转点稳固防止下沉.图 2-10微倾式水准仪(de)使用§2-3 DS3使用水准仪(de)基本作业是:在适当位置安置水准仪,整平视线后读取水准尺上(de)读数.微倾式水准仪(de)操作应按下列步骤和方法进行:1. 安置水准仪首先打开三脚架,安置三脚架要求高度适当、架头大致水平并牢固稳妥,在山坡上应使三脚架(de)两脚在坡下一脚在坡上.然后把水准仪用中心连接螺旋连接到三脚架上,取水准仪时必须握住仪器(de)坚固部位,并确认已牢固地连结在三脚架上之后才可放手.2. 仪器(de)粗略整平仪器(de)粗略整平是用脚螺旋使圆水准器(de)气泡居中.不论圆水准器在任何位置,先用任意两个脚螺旋使气泡移到通过圆水准器零点并垂直于这两个脚螺旋连线(de)方向上,如图2-11中气泡自a移到b,如此可使仪器在这两个脚螺旋连线(de)方向处于水平位置.然后单独用第三个脚螺旋使气泡居中,如此使原两个脚螺旋连线(de)垂线方向亦处于水平位置,从而使整个仪器置平.如仍有偏差可重复进行.操作时必须记住以下三条要领:(1)先旋转两个脚螺旋,然后旋转第三个脚螺旋;(2)旋转两个脚螺旋时必须作相对地转动,即旋转方向应相反.(3)气泡移动(de)方向始终和左手大拇指移动(de)方向一致.图 2-113 照准目标用望远镜照准目标,必须先调节目镜使十字丝清晰.然后利用望远镜上(de)准星从外部瞄准水准尺,再旋转调焦螺旋使尺像清晰,也就是使尺像落到十字丝平面上.这两步不可颠倒.最后用微动螺旋使十字丝竖丝照准水准尺,为了便于读数,也可使尺像稍偏离竖丝一些.当照准不同距离处(de)水准尺时,需重新调节调焦螺旋才能使尺像清晰,但十字丝可不必再调.照准目标时必须要消除视差.当观测时把眼睛稍作上下移动,如果尺像与十字丝有相对(de)移动,即读数有改变,则表示有视差存在.其原因是尺像没有落在十字丝平面上(图2-12a、b).存在视差时不可能得出准确(de)读数.消除视差(de)方法是一面稍旋转调焦螺旋一面仔细观察,直到不再出现尺像和十字丝有相对移动为止,即尺像与十字丝在同一平面上(图2-12c).(a) (b) (c)图 2-124. 视线(de)精确整平由于圆水准器(de)灵敏度较低,所以用圆水准器只能使水准仪粗略地整平.因此在每次读数前还必须用微倾螺旋使水准管气泡符合,使视线精确整平.由于微倾螺旋旋转时,经常在改变望远镜和竖轴(de)关系,当望远镜由一个方向转变到另一个方向时,水准管气泡一般不再符合.所以望远镜每次变动方向后,也就是在每次读数前,都需要用微倾螺旋重新使气泡符合.5. 读数用十字丝中间(de)横丝读取水准尺(de)读数.从尺上可直接读出米、分米和厘米数,并估读出毫米数,所以每个读数必须有四位数.如果某一位数是零,也必须读出并记录.不可省略,如1.002m、0.007m、2.100m等.由于望远镜一般都为倒像,所以从望远镜内读数时应由上向下读,即由小数向大数读.读数前应先认清水准尺(de)分划特点,特别应注意与注字相对应(de)分米分划线(de)位置.为了保证得出正确(de)水平视线读数,在读数前和读数后都应该检查气泡是否符合.§2-4水准测量方法与侧过计算按照精度要求(de)不同,我国水准测量分为一、二、三、四等,还有不属于规定等级(de)水准测量,我们称为普通水准测量,又叫做等外水准测量.普通水准测量(de)精度比国家等级(de)精度要低,水准路线(de)布设及水准点(de)密度有着较大(de)灵活性,但等级水准测量(de)原理是相同(de).一、水准点和水准路线(一)、水准点(Bench Mark):用水准测量方法测定高程(de)控制点称为水准点,一般用其英文缩写BM表示.国家等级(de)水准点按要求埋设永久固定标志;不需永久保存(de)则在地面上打入木桩,或在地面,建筑物上设置苦定标志,并标记.(二)、水准路线:水准测量(de)任务,是从已知高程(de)水准点开始测量其他水准点或地面点(de)高程.测量前应根据要求布置并选定水准点(de)位置,埋设好水准点标石,拟定水准测量进行(de)路线.水准路线(de)布设形式分单一水准路线和水准网,单一水准路线有以下三种布设形式:图 2-3-1(1) 附合水准路线是水准测量从一个高级水准点开始,结束于另一高级水准点(de)水准路线.这种形式(de)水准路线,可使测量成果得到可靠(de)检核(图2-3-1a).(2) 闭合水准路线是水准测量从一已知高程(de)水准点开始,最后又闭合到起始点上(de)水准路线.这种形式(de)水准路线也可以使测量成果得到检核(图2-3-1b).(3) 水准支线是由一已知高程(de)水准点开始,最后既不附合也不闭合到已知高程(de)水准点上(de)一种水准路线.这种形式(de)水准路线由于不能对测量成果自行检核,因此必须进行往测和返测,或用两组仪器进行并测(图2-3-1c).水准网当几条附合水准路线或闭合水准路线连接在一起时,就形成了水准网(图2-3-1d、e).水准网可使检核成果(de)条件增多因而可提高成果(de)精度.二、水准测量(de)施测方法(一)普通水准测量(de)观测顺序:水准测量施测顺序如图2-3-2所示,图中A为已知高程(de)点,B为待求高程(de)点.1.在已知高程(de)起始点A上竖立水准尺,作为后视尺;2.在测量前进方向离起点不超过150m处设立第一个转点Z1,必要时可放置尺垫,并竖立水准尺,作为前视尺.3.在离这两点等距离处I安置水准仪.仪器粗略整平后,先照准起始点A上(de)水准尺,用微倾螺旋使气泡符合后,读取A点(de)后视读数,并记入手簿;4.然后照准转点Z1上(de)水准尺,气泡符合后读取Z1点(de)前视读数.把读数记入手簿,并计算出这两点间(de)高差.此时就算是完成了一个测站(de)观测过程.5.将仪器迁至第二站,此时在转点Z1处(de)水准尺不动,仅把尺面转向前进方向.在A点(de)水准尺向前转移,水准尺安置在与第一站有同样间距(de)转点Z2,按在第I站同样(de)步骤和方法读取后视读数和前视读数,并计算出高差.这样九完成了第二站高差(de)观测.6.如此继续进行直到待求高程点B.图 2-3-2(二)注意事项1.在已知高程点上立尺,直接放在标石中心(或木桩)上;2.仪器到前后水准尺(de)距离要大致相等,可用视距或脚步量测确定;3.水准尺要扶直,不能前后左右倾斜;4.尺垫仅用于转点,仪器搬站前,不能移动后视点(de)尺垫;5.记录数据时不得涂改原始记录,有误或记错(de)数据应划去,再将正确数据写在上方,并在备注栏内注明原因.使记录簿干净、整齐.(三)水准测量观测记录观测所得每一读数应立即记入手簿,水准测量手簿格式见实习手簿.填写时应注意把各个读数正确地填写在相应(de)行和栏内.例如仪器在测站I 时,起点A 上所得水准尺读数应记入该点(de)后视读数栏内,照准转点Z 1所得读数应记入Z 1点(de)前视读数栏内.后视读数减前视读数得A 、Z 1两点(de)高差+记入高差栏内.以后各测站观测所得均按同样方法记录和计算.各测站所得(de)高差代数和h ∑,就是从起点A 到终点B 总(de)高差.终点B(de)高程等于起点A(de)高程A 、B 间(de)高差.因为测量(de)目(de)是求B 点(de)高程,所以各转点(de)高程不需计算.为了节省手簿(de)篇幅,在实际工作中常把水准手簿格式简化格式(见实习手簿).这种格式实际上是把同一转点(de)后视读数和前视读数合并填在同一行内,两点间(de)高差则一律填写在该测站前视读数(de)同一行内.其他计算和检核均相同.在每一测段结束后或手簿上每一页之末,必须进行计算检核.检查后视读数之和减去前视读数之和()b a ∑-∑是否等于各站高差之和()h ∑,并等于终点高程减起点高程.如不相等,则计算中必有错误,应进行检查.但应注意这种检核只能检查计算工作有无错误,而不能检查出测量过程中所产生(de)错误,如读错记错等.检查测量过程中(de)差错,要采用下面将要叙述(de)方法.三、水准测量成果(de)检核为了保证水准测量成果(de)正确可靠,在进行内业计算前,对水准测量(de)成果必须进行检核.检核方法有测站检核和水准路线检核两种:(一) 测站检核为防止在一个测站上发生错误而导致整个水准路线结果(de)错误,可在每个测站上对观测结果进行检核,方法如下:1. 两次仪器高法 在每个测站上一次测得两转点间(de)高差后,改变一下水准仪(de)高度,再次测量两转点间(de)高差.对于一般水准测量,当两次所得高差之差小于5mm 时可认为合格,取其平均值作为该测站所得高差,否则应进行检查或重测.2. 双面尺法 利用双面水准尺分别由黑面和红面读数得出(de)高差,扣除一对水准尺(de)常数差后,两个高差之差小于5mm 时可认为合格,否则应进行检查或重测.用双面尺进行水准测量(de)检核方法具体方法以后在讲.(二) 水准路线(de)检核1. 附合水准路线 为使测量成果得到可靠(de)检核,最好把水准路线布设成附合水准路线.对于附合水准路线,理论上在两已知高程水准点间所测得各站高差之和应等于起迄两水准点间高程之差.即如果它们不能相等,其差值称为高程闭合差,用h f 表示.所以附合水准路线(de)高程闭合差为:高程闭合差(de)大小在一定程度上反映了测量成果(de)质量.2. 闭合水准路线 在闭合水准路线上亦可对测量成果进行检核.对于闭合水准路线,因为它起迄于同一个点,所以理论上全线各站高差之和应等于零.即0=∑h如果高差之和不等于零,则其差值即h ∑就是闭合水准路线(de)高程闭合差.即h f h ∑= 3. 水准支线 水准支线必须在起终点间用往返测进行检核.理论上往返测所得高差(de)绝对值应相等,但符号相反,或者是往返测高差(de)代数和应等于零.即如果往返测高差(de)代数和不等于零,其值即为水准支线(de)高程闭合差.即有时也可以用两组并测来代替一组(de)往返测以加快工作进度.两组所得高差应相等,若不等,其差值即为水准支线(de)高程闭合差.故21h h f h ∑-∑=闭合差(de)大小反映了测量成果(de)精度.在各种不同性质(de)水准测量中,都规定了高程闭合差(de)限值即容许高程闭合差,用h F 表示.一般水准测量(de)容许高程闭合差为:()()⎪⎭⎪⎬⎫±=±=mm n F mm L F h h 1240山地平地 式中L 为附合水准路线或闭合水准路线(de)长度,在水准支线上,L 为测段(de)长,均以公里为单位,n 为测站数. 返往 h h f h返往 h h始终 H H h f h 始终 H H h当实际闭合差小于容许闭合差时,表示观测精度满足要求,否则应对外业资料进行检查,甚至返工重测.四、闭合差(de)调整和高程(de)计算当实际(de)高程闭合差在容许值以内时,可把闭合差分配到各测段(de)高差上.显然,高程测量(de)误差是随水准路线(de)长度或测站数(de)增加而增加,所以分配(de)原则是把闭合差以相反(de)符号根据各测段路线(de)长度或测站数按比例分配到各测段(de)高差上.故各测段高差(de)改正数为:i h i L L f v ⋅∑-= 或i h i n n f v ⋅∑-=式中i L 和i n 分别为各测段路线之长和测站数;i L ∑和i n ∑分别为水准路线总长和测站总数.举例说明:书P24,算例.对于水准支线,应将高程闭合差按相反(de)符号平均分配在往测和返测所得(de)高差值上.例在A 、B 两点间进行往返水准测量,已知H A =8.475m,m h 028.0+=∑往,m h 018.0-=∑返,A 、B 间线路长L=3km,求改正后(de)B 点高程.实际高程闭合差容许高程闭合差mm L F h 5233030±=±=±=,h h F f <,故精度符合要求. 改正后往测高差改正后返测高差故B 点高程. §2-5 水准仪(de)检验与校正1.圆水准器(de)检验与校正检验方法:转脚螺旋使圆水准器气泡居中,然后将仪器上部在水平方向绕竖轴旋转180°,若气泡仍居中,则表示圆水准器轴已平行于竖轴,若气泡偏离中央则需进行校正.m h H H A B 498 . 8 023 . 0 475 . 8 往 m f h h h 023 . 0 2 010 . 0 018 . 2 返 返 m f h h h 023 . 0 2 010 . 0 028 . 0 2 往 往 m h h f h 010 . 0 018 . 0 028 . 0 - 返 往校正方法 用脚螺旋使气泡向中央方向移动偏离量(de)一半,然后拨圆水准器(de)校正螺旋使气泡居中.由于一次拨动不易使圆水准器校正得很完善,所以需重复上述(de)检验和校正,使仪器上部旋转到任何位置气泡都能居中为止;2.望远镜十字丝(de)检验与校正检验方法 先用横丝(de)一端照准一固定(de)目标或在水准尺上读一读数,然后用微动螺旋转动望远镜,用横丝(de)另一端观测同一目标或读数.如果目标仍在横丝上或水准尺上读数不变,说明横丝已与竖轴垂直.若目标偏离了横丝或水准尺读数有变化,则说明横丝与竖轴没有垂直,应予校正校正方法 打开十字丝分划板(de)护罩,可见到三个或四个分划板(de)固定螺丝.松开这些固定螺丝,用手转动十字丝分划板座,反复试验使横丝(de)两端都能与目标重合或使横丝两端所得水准尺读数相同,则校正完成.最后旋紧所有固定螺丝;3.水准管轴平行与视准轴(de)检验与校正检验方法 在平坦地面选相距80~100m(de)A 、B 两点,在两点打入木桩或设置尺垫.水准仪首先置于离A 、B 等距(de)I 点,测得A 、B 两点(de)高差11111)()(b a x b x a h -=+-+=若视准轴与水准管轴不平行而构成i 角,由于仪器至A 、B 两点(de)距离相等,因此由于视准轴倾斜,而在前、后视读数所产生(de)误差x 也相等,所以所得(de)I h 是A 、B 两点(de)正确高差.然后把水准仪移到AB 延长方向上靠近B(de)Ⅱ点,再次测A 、B 两点(de)高差,必须仍把A 作为后视点,根据正确高差可求出A 尺(de)正确读数22'b h a a +=设A 尺(de)实际读数为a 2,若a 2’= a 2,说明满足条件.当a 2’> a 2, 说明视准轴向下倾斜;a 2’< a 2,说明视准轴向上倾斜.若a 2’- a 2=±3mm 时,需要校正.校正方法:为了使水准管轴和视准轴平行,用微倾螺旋,使十字丝(de)横丝切于A 尺(de)正确读数a 2’处,此时视准轴由倾斜位置改变到水平位置,但水准管也因随之变动而气泡不再符合.用校正针拨动水准管一端(de)校正螺旋使气泡符合,则水准管轴也处于水平位置从而使水准管轴平行于视准轴.校正时先松动左右两校正螺旋,然后拨上下两校正螺旋使气泡符合.拨动上下校正螺旋时,应先松一个再紧另一个逐渐改正,当最后校正完毕时,所有校正螺旋都应适度旋紧.§2-6 水准测量误差及其消减方法测量工作中由于仪器、人、环境等各种因素(de)影响,使测量成果中都带有误差.为了保证测量成果(de)精度,需要分析研究产生误差(de)原因,并采取措施消除和减小误差(de)影响.水准测量中误差(de)主要来源如下:一、仪器误差(一) 视准轴与水准管轴不平行引起(de)误差仪器虽经过校正,但i角仍会有微小(de)残余误差.当在测量时如能保持前视和后视(de)距离相等,这种误差就能消除.当因某种原因某一测站(de)前视(或后视)距离较大,那么就在下一测站上使后视(或前视)距离较大,使误差得到补偿.(二) 调焦引起(de)误差当调焦时,调焦透镜光心移动(de)轨迹和望远镜光轴不重合,则改变调焦就会引起视准轴(de)改变,从而改变了视准轴与水准管轴(de)关系.如果在测量中保持前视后视距离相等,就可在前视和后视读数过程中不改变调焦,避免因调焦而引起(de)误差.(三) 水准尺(de)误差水准尺(de)误差包括分划误差和尺身构造上(de)误差,构造上(de)误差如零点误差和箱尺(de)接头误差.所以使用前应对水准尺进行检验.水准尺(de)主要误差是每米真长(de)误差,它具有积累性质,高差愈大误差也愈大.对于误差过大(de)应在成果中加入尺长改正.二、观测误差(一) 气泡居中误差视线水平是以气泡居中或符合为根据(de),但气泡(de)居中或符合都是凭肉眼来判断,不能绝对准确.气泡居中(de)精度也就是水准管(de)灵敏度,它主要决定于水准管(de)分划值.一般认为水准管居中(de)误差约为分划值,它对水准尺读数产生(de)误差为:sm ⋅''=ρτ1.0 式中τ″为水准管(de)分划值,520626''=ρ,s 为视线长.符合水准器气泡居中(de)误差大约是直接观察气泡居中误差(de)5121~.为了减小气泡居中误差(de)影响,应对视线长加以限制,观测时应使气泡精确地居中或符合.(二) 估读水准尺分划(de)误差水准尺上(de)毫米数都是估读(de),估读(de)误差决定于视场中十字丝和厘米分划(de)宽度,所以估读误差与望远镜(de)放大率及视线(de)长度有关.通常在望远镜中十字丝(de)宽度为厘米分划宽度(de)十分之一时,能准确估读出毫米数.所以在各种等级(de)水准测量中,对望远镜(de)放大率和视线长(de)限制都有一定(de)要求.此外,在观测中还应注意消除视差,并避免在成像不清晰时进行观测.(三) 扶水准尺不直(de)误差水准尺没有扶直,无论向哪一侧倾斜都使读数偏大.这种误差随尺(de)倾斜角和读数(de)增大而增大.例如尺有3°(de)倾斜,读数为1.5m 时,可产生2mm(de)误差.为使尺能扶直,水准尺上最好装有水准器.没有水准器时,可采用摇尺法,读数时把尺(de)上端在视线方向前后来回摆动,当视线水平时,观测到(de)最小读数就是尺扶直时(de)读数(图2-6-1).这种误。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
2 、测得两点间高差 后,若已知 A 点高程 ,则可得 B 点的高程:
4 、转点 TP(turning point) 的概念: 当地面上两点的距离较远, 或两点的高差太大,
放置一次仪器不能测定其高差时,就需增设若干个临时传递高程的立尺点,称为转点。
二、连续水准测量
后视点
前视点
1、 A 、 B 两点间高差:
3、视线高程:
A
B
DS3 微倾式水准仪自动安平水准仪
1 、望远镜(telescope)
由物镜、目镜和十字丝(上、中、下丝)三部分组成。
2 、水准器(bubble) 有两种:
精度低,用于粗略整平;水准管(bubble tube)圆水准器(circular
bubble)
三、尺垫(staff plate)
放置在转点上,为防止观测过程中水准尺下沉。
四、水准仪的使用
操作程序:粗平——瞄准——精平——读数
(一)粗平——调节脚螺旋,使圆水准气泡居中。
1、方法:对向转动脚螺旋1 、2 ——使气泡移至1 、2 方向的中间——转动
脚螺旋3 ,使气泡居中。
2 、规律:气泡移动方向与左手大拇指运动的方向一致。
(二)瞄准
1、方法:先用准星器粗瞄,再用微动螺旋精瞄。
2、视差
概念:眼睛在目镜端上下移动时,十字丝与目标像有相对运动。
产生原因:目标像平面与十字丝平面不重合。
消除方法:仔细反复交替调节目镜和物镜对光螺旋。
(三)精平
1 、方法:如图所示微倾式水准仪(tilt level),调节微倾螺旋,使水准管气泡成像
抛物线符合。
、水准路线(leveling line)
水准路线依据工程的性质和测区情况,可布设成以下几种形式:
1 、闭合水准路线(closed leveling line) 。
由已知点BM1 ——已知点BM1
2 、附合水准路线(annexed leveling line) 。
由已知点BM1 ——已知点BM2
3 、支水准路线(spur leveling line) 。
由已知点BM1 ——某一待定水准点A 。
4、水准网:若干条单一水准路线相互连接构成的图形。
三、水准测量的实施(外业)
1、观测要求
如图,有:
1)水准仪安置在离前、后视距离大致相等之处。
2 )为及时发现观测中的错误,通常采用“两次仪器高法”或“双面尺法
两次仪器高法:高差之差h-h'< ±5mm ;双面尺法,① 红黑面读数差<±3mm ② h 黑-h 红< ±5mm 。
2、水准测量记录表
注意:(1)起始点只有后视读数,结束点只有前视读数,中间点既有后视读数又有前视读数。
(2),只表明计算无误,不表明观测和记录无误。
四、水准测量的成果处理(内业)
一)计算闭合差:
1、闭合水准路线:
二)分配高差闭合差
1、高差闭合差限差(容许误差)
对于普通水准测量,有:
L ——水准路线长度,单位:km ;n ——测站数
2、分配原则:
按与距离L 或测站数n 成正比,将高差闭合差反号分配到各段高差上。
三)计算各待定点高程
用改正后的高差和已知点的高程,来计算各待定点的高程。
五、水准测量的成果实例
【例】如图为按图根水准测量要求施测某附合水准路线观测成果略图。
BM-A 和BM-B 为已知高程的水准点,图中箭头表示水准测量前进方向,路线上方的数字为测得的两点间的高差(以m 为单位),路线下方数字为该段路线的长度(以km 为单位),试计算待定点1 、2 、3 点的高程。
解算如下:
式中,高差闭合差限差,单位:mm
2、附合水准路线:
第一步计算高差闭合差:第二步计算限差:
因为,可进行闭合差分配。
第三步计算每km 改正数:
第四步计算各段高差改正数:。
四舍五入后,使故有:V 1 =- 8mm ,V 2 =- 11mm ,V 3 =- 8mm ,V 4 =- 10mm 。
第五步计算各段改正后高差后,计算1 、2 、3 各点的高程。
改正后高差= 改正前高差+ 改正数V i
H 1 =H BM-A +(h 1 +V 1 )=45.286+2.323=47.609(m)
H 2 =H 1 +(h 2 +V 2 )=47.509+2.802=50.411(m)
H 3 =H 2 +(h 3 +V 3 )=50.311-2.252=48.159(m)
HBM-B =H 3 +(h 4 +V 4 )=48.059+1.420=49.579(m)
可用EXCEL 软件计算如下图:
§ 2.5 水准仪的检验与校正
、水准仪轴线的几何关系
水准仪轴线应满足的几何条件是:
1 、水准管轴LL// 视准轴CC
2、圆水准轴L ' L ' // 竖轴VV
3 、横丝要水平(即:⊥ 竖轴VV )
如下图所示:
二、水准仪的检验与校正
(一)圆水准器的检验与校正
1 、检验:气泡居中后,再将仪器绕竖轴旋转180 °,看气泡是否居中。
2 、校正:用脚螺旋使气泡向中央移动一半, 再用拨针拨动三个“校正螺旋”,使气泡居中。
二)十字丝横丝的检验与校正
1、检验:
整平后,用横丝的一端对准一固定点P ,转动微动螺旋,看P 点是否沿着横丝
2 、校正:旋下目镜处的十字丝环外罩,转动左右 2 个“校正螺丝”。
移动。
2 、校正方法有二种:
(1)校正水准管
旋转微倾螺旋,使十字丝横丝对准(a 2 ' =h 1 +b 2 ) ,拨动水准管使水准管气泡居中。
(2)校正十字丝——可用于自动安平水准仪
保持水准管气泡居中,拨动十字丝上下两个“校正螺丝”,使横丝对准
§ 2.6 自动安平、精密、电子水准仪简介
、自动安平水准仪(compensator level)
1、原理——与普通水准仪相比,在望远镜的光路上加了一个补偿器。
态是指示窗的三角形尖顶与横指标线平齐。
校正螺丝
最好状
2、使用——粗平后,望远镜内观察警告指示窗若全部呈绿色,方可读数;
3、检校——与精通水准仪相比,要增加一项补偿器的检验,即:转动脚螺旋,看警告指示窗是否出现红色;以此来检查补偿器是否失灵。
二、精密水准仪(precise level )(每公里往返平均高差中误差1mm )
1 、精密水准仪——提供精确的水平视线和精确读数。
精密水准仪
2、精密水准尺——刻度精确(铟钢带水准尺invar leveling staff)
3、读数方法
(1)精平后,转动测微螺旋,使十字丝的楔形丝精确夹准某一整分划线。
(2)读数时,将整分划值和测微器中的读数合起来。
如: 14865.0mm
、数字水准仪(digital level) 及条纹码水准尺(coding level staff)
1、具有自动安平、显示读数和视距功能。
2、能与计算机数据通讯,避免了人为观测误差。
来源有:仪器误差、操作误差、外界条件影响。
、仪器误差。