ADAMS在弧焊机器人运动学中的仿真分析和应用
基于ADAMS的搅拌摩擦点焊机器人动力学仿真分析
0
,
时 间 以
f .
V
乙
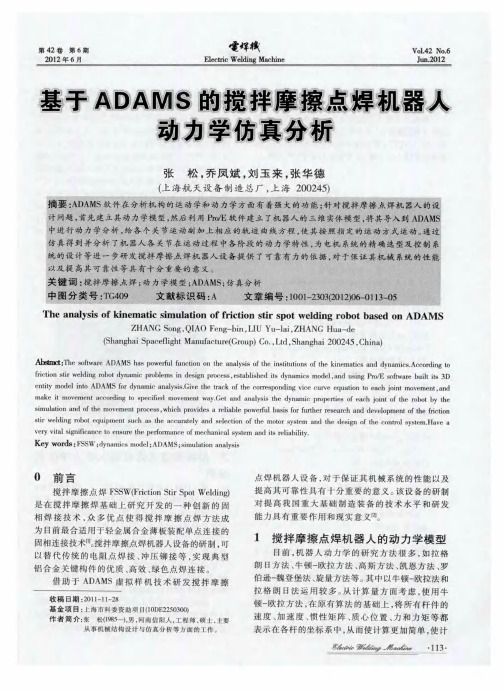
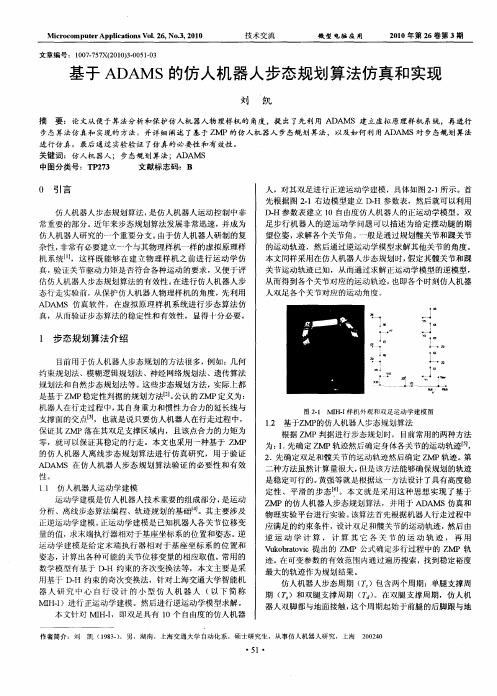
图 6 点 焊 机 器 人 各 关节 的 力矩 曲线
Fg o q e u v s f S W o o’ e c it i. T r u r e S r b t ahj n 6 c oF S o
内 , 焊 机 器 人空 载 运 行 , 械 臂应 迅 速 到 达 要 求 点 机 焊 接 的工件 上方 , 以要 有 较 大的 角加 速度 和 角速 所 度 ; 在 3 -.s 5  ̄ .s 而 5 4 和 . 7 内关 节 2完 成焊接 , 0 5 5 在
j
9 1 O 1 1
—
}
、 /
\ /
\/
2 3 5时 间
一
10 5 O
6
7
8
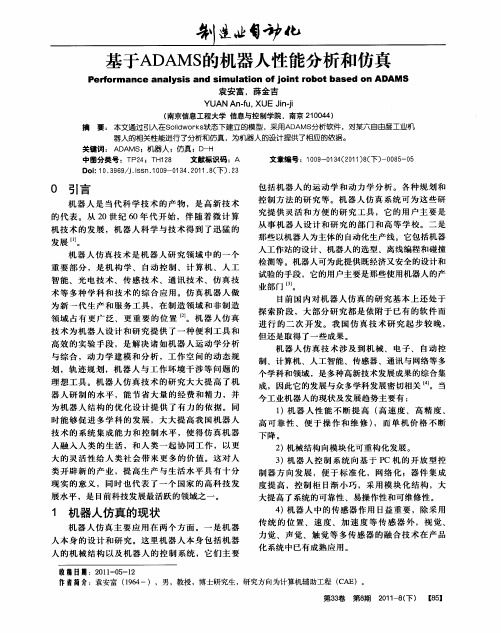
图 4 点 焊 机 器 人 各 关 节 的 角 速 度 曲线 Fg A g l p e u v f S W o o’E c it i. 4 n ua s edc reo S r b t a hj n r F S o
() 节 1的 角速 度 和 角加 速 度 在 75 95S之 1 关 .- . 间较 大 , 他 时 间段 普 遍 较 小 , 是 因为 该 时 间段 其 这
内要 转 移 到另外 一 点进 行焊 接 , 主要 依 靠关 节 1的
角速 度和 角加 速 度都 应较 大 , 真结 果 与实 际分 析 仿
免 在焊 接复 杂 工件时 发生 碰撞 。 因此都 是 在特定 的 动作 时间段 内有较 大 的角速 度 和角 加速 度 , 仿真 结 果 与 实际分 析相 符罔 。
对点 焊 机器 人各 关节 的力 矩 进行 统计 可知 , 点
基于ADAMS的机器人性能分析和仿真
时 能 够 促 进 多 学 科 的 发 展 ,大 大 提 高我 国机 器 人 技 术 的 系 统 集 成 能 力 和 控 制 水 平 ,使 得 仿 真 机 器
人 融 入 人 类 的 生 活 ,和 人 类 一 起协 同 工 作 ,以 更
高可靠性 、便于操作 和维修 ) ,而 单 机 价 格 不 断
技 术 为 机 器 人设 计 和 研 究提 供 了一 种 便 利工 具 和 高 效 的 实 验 手 段 ,是 解 决 诸 如 机 器 人 运 动 学分 析 与 综 合 ,动 力 学建 模 和 分 析 ,工 作 空 间 的动 态规 划 ,轨 迹 规 划 ,机 器 人 与 工 作 环 境 干 涉 等 问题 的
目前 国 内 对机 器 人 仿 真 的研 究基 本 上 还 处 于 探 索 阶段 ,大 部 分 研 究 都 是 依 附 于 已 有 的软 件 而 进 行 的二 次 开 发 。我 国 仿 真 技 术 研 究 起 步 较 晚 ,
但还 是取 得 了一些 成果 。
领域 占有 更 广 泛 、更 重 要 的位 置 。机 器 人 仿 真
本 文 所 介 绍 的机 器 人 由基 座 、大 臂 、二 臂 和
碗 部 四个 部 分 组 成 ,如 图 1 示 。通 过 其 内部 齿 所
轮 的组 装 配 合 ,实 现 机 器 人 的 六 个 自 由度 ,依
以连 杆 i 为 例 ,其 两端 的 两 个 关 节 的转 动 -1 轴 线 分 别为 i -1和 i ,这 两个 轴 线 的公 共法 线 的 长
现 实 的 意 义 ,同时 也 代 表 了一 个 国 家 的 高科 技 发 展水 平 ,是 目前科 技 发展 最活 跃 的领域 之一 。
大提 高 了系统 的可 靠性 、易操作性 和 可维修 性 。 4 机 器 人 中的 传 感器 作 用 日益 重 要 ,除 采 用 )
基于ADAMS的柔性焊接机器人动力学仿真

并进 行 了动 力学仿 真 。结果 表 明 :柔性 手臂 构件 对机 械 手 的运动 精度 产 生 了较 大影响 。 关键 词 :机械 动 力 学 ;虚拟 样机 ;刚 柔耦 合 模 型
中图分类号 : P 4 .; P 9 . T22 T 31 2 9 文献标 志码 : A
‘
文章编 号 :17 - 8 32 1)4 04 - 4 6 3 9 3 (0 0 - 0 50 1 -
【】 席俊杰. 4 虚拟样机技术的发展及应用 【 . J 制造业 自动化 , 】
2 o ,2 (1: 1— 1 0 6 81) 9 2 .
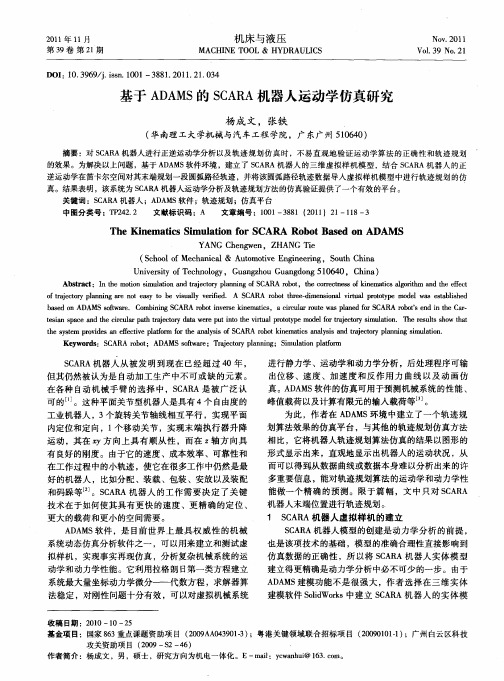
择 Po akn ltrcig命令 ,可 以得到最大值 、平均值 以及 t 均方根值 等。当角速度 为 10 oI时 ,机械手 的加速 0 ) s 度在 00 达到最大值 13 3 s ( . s 8 5. 5 图中虚线所示 ) 0 m/ ;
不 同定义 日 。简单来讲 ,虚拟样 机技术就 是用来代 】
替 真 实物理 样机 的技 术 ,即在 产 品设 计 过程 中 ,利 用 零 部 件 设 计 及 分 析技 术 ,构 造 出 产 品 的 整体 模 型 ,然后对 其各 种工 况进 行仿 真分 析 ,测得 其整 体 性 能 ,从 而对 产 品进行 优化 设计 的一 门技 术 】 。虚 拟 样 机技 术一 般 可 分为 以下 几个 过 程 : 1 )概念设计 。 即在 ADA MS软件里完成实体 建 模 ,或 者从其 他 CA 软件 中导入 ,经过 添加 约束 、 D 力 矩 等 产 生 系 统 模 型 ,建 立 整 体 样 机 模 型 。 在
Dy a c i lt no lxb eW e dn b t s d o n misS mu ai f e i l li g Ro o e n ADAM S o F Ba
基于ADAMS的SCARA机器人运动学仿真研究
o t j t l nn l o es ob i ayvr e. A S A A r o tr —ies n iul rt yem d l a s bi e fr e o pa iga nt ayt ev ul e fd C R o t he dm ni a v ta p o p oe w set lhd a c r n y e s l i i b e ol r o t a s
YANG e g n. ZHANG e Ch n we Ti
( c o lo c a ia S h o fMe h nc l& Auo t e E gn eig o t hn tmoi n ie rn .S uh C ia v
U iesyo T cn l y u nzo u n dn 1 6 O hn ) nvri f eh o g ,G a gh uG ag og5 0 4 ,C ia t o
21 年 1 01 1月
机床与液压
MACHI NE TOOL & HYDRAUL CS I
NO . 0 1 V 2 1
第3 9卷 第 2 1期
Vo . 9 No 2 13 . 1
DO :1 . 9 9 j i n 10 I 0 3 6 / .s . 0 1—3 8 . 0 . 1 0 4 s 8 12 1 2. 3 1
Kew rs C R bt D M f ae r et ypann ;Smlt npa o y o d :S A A r o;A A Ss tr ;Ta c r lnig i ua o ltr o ow j o i fm
S A A机器 人从 被发 明到 现在 已经超 过 4 CR 0年 , 但其仍然被认为是 自动加 工生产 中不可 或缺 的元 素。 在各种 自动 机械 手臂 的选择 中,S A A是被 广泛认 CR 可 的… 。这种平面关 节型机 器人是具有 4个 自由度的 工业机器人 ,3个旋转关节轴线相互 平行 ,实现 平面
基于ADAMS的点焊机器人动力学优化分析
( . n u P l eh i U iesy Wu uA h i 4 0 C ia 1 A h i o tcnc nvri , h n u 0 , hn ; y t 21 0 2 C eyA tm bl C .Ld , h n u 2 10 , hn ) . h r uo o i o t. Wu uA h i 4 0 6 C i e a
关键词 : 焊机器人 ; 力学分析 ;D M 点 动 A A S软 件 中 图 分 类 号 : P 4 . T 22 2 文献标识码 : A 文 章 编 号 :10 0 9—76 (0 1 0 0 4 0 9 1 2 1 )5— 04— 4
Th n m i sOptm ia in Anay i fS tW edi g Ro tBa e n ADAM S e Dy a c i z to l sso po l n bo s d o
中由机 器 人 的零 件 图 完 成 二 维 模 型 的 建 立 装 三
由于机 器 人 运 动情 况 比较 复 杂 , 用 人 工 计 算 很 因此 , 利 本文 只保 留 了主要 部 件 , Sl Wok 件 在 od rs软 i 配, 通过 Sl Wok 程 序接 口导人 A a s od rs i dm 软件 ,
i 0 . 0
§
茸
趸 。o 。 {
/
\
l- s
粤
Ⅲ
。
盛
喜m。 I
2。 。 船
.
詈 砌
2 00 5 00 05 1 1S 20 25 30 3S 40 45 . 0 . . .
为机器人 的设 计提 供依 据 。
基于ADAMS的五自由度焊接机械手运动学分析
设计提供 了参 考依 据。 关键 词 : 焊接机械手 ; D M ;五 自由度 ; 动学 分析 AAS 运
中图分 类号 :P 4 T2 1 D I1 .9 3 ji n 10 O :0 3 6/.s .07—14 2 1 .20 2 s 4 X.02 0 .1
焊 接机 械手 在高 质 、 高效 的焊 接生 产 中 , 发挥 了极 其 重 要 的 作用 , 它将 操 作 人 员从 繁重 、 调 、 单
第3 卷 第2 4 期
21年 4 02 月
武 汉理工 大学学报 ( 息与管理工 程版 ) 信
J U N LO T IF R A IN&M N G M N N IE RN ) O R A FWU ( O M TO N A A E E TE GN E IG
Vo . 4 No 2 13 .
图 2所示
 ̄WCa g) r 小臂∞ ) 手赡秆 4 手部沂5 ) )
五
一
编程计算, 可得出以 0 一 5 。0 为变量的运动学方程。
a P
。 T5 =
ay Py
() 3
a : P
0
1
中 : =CC 45一SS; =¥C 45 1 ; n 1 3C 2 1 v 12 C +C¥ 5 3 5
摘
E建立了五 自由度焊接机械手 的三维模 型 , r/
对其 建立 D— H模型和运动学分析 。利用 运动学分析软件 A A S D M 对其 简化模 型进 行运动 特性仿真分 析 , 给
出了机械 手在 特定运动状态下各关节 的角速度 、 扭矩及角 加速度 等特性 曲线 , 为机械手 运动控制及结构 优化
重复的体力劳动中解放 出来 。这不仅大大提高了 生产效率 , 同时也极大地提高 了产品 的加工精度 和产 品质 量 。
机器人运动学分析与仿真实现
机器人运动学分析与仿真实现在当今科技飞速发展的时代,机器人技术的应用越来越广泛,从工业生产中的自动化装配线,到医疗领域的手术机器人,再到家庭服务中的智能机器人,机器人已经逐渐融入到我们生活的方方面面。
而机器人运动学作为机器人技术的重要基础,对于机器人的设计、控制和应用具有至关重要的意义。
本文将对机器人运动学进行分析,并探讨其仿真实现的方法和过程。
一、机器人运动学的基本概念机器人运动学主要研究机器人各关节的运动与机器人末端执行器位姿之间的关系。
简单来说,就是如何通过控制机器人的关节角度或位移,来实现期望的末端执行器的位置和姿态。
机器人运动学可以分为正运动学和逆运动学两个方面。
正运动学是已知机器人各关节的参数(如关节角度、长度等),求解末端执行器在空间中的位置和姿态。
这就好比我们知道了一个人的各个肢体的长度和关节的转动角度,就能推算出他的手能够到达的位置。
逆运动学则是已知末端执行器的期望位置和姿态,求解各关节应有的参数值。
这相当于我们给定了一个目标位置,需要反过来计算出各个肢体应该如何运动才能达到这个目标。
二、机器人运动学模型的建立为了进行机器人运动学的分析,首先需要建立机器人的运动学模型。
常见的机器人模型有串联机器人和并联机器人。
串联机器人是由一系列关节依次连接而成,每个关节只有一个自由度;并联机器人则是由多个支链并行连接到动平台和静平台之间,具有多个自由度。
在建立模型时,需要确定机器人的连杆参数,包括连杆长度、连杆扭转角、关节偏移量和关节转角等。
这些参数通常可以通过机器人的机械结构设计图纸或实际测量得到。
以一个简单的平面两关节机器人为例,我们可以将其看作是两个连杆通过关节连接在一起。
设第一个连杆的长度为$l_1$,第二个连杆的长度为$l_2$,关节 1 的转角为$\theta_1$,关节 2 的转角为$\theta_2$。
通过三角函数的关系,可以得到末端执行器在平面坐标系中的位置坐标$(x, y)$与关节角度$\theta_1$ 和$\theta_2$ 之间的关系。
利用ADAMS进行动态仿真分析的一般方法和过程111

基于ADAMS软件进行动态仿真分析的一般方法和过程摘要:本文通过对相关资料的总结归纳,介绍了虚拟样机的发展现况、ADAMS软件、特点以及利用其进行动态仿真的一般方法和过程。
并结合多功能开沟机液压系统进行了建模与仿真分析。
关键词:仿真 ADAMS 优化虚拟样机1、前言随着近代科学技术的发展,工程设计的理论、方法和手段都发生了很大的变化。
从计算机辅助工程(CAE)的广泛应用,到并行工程(CE)思想的提出与推行,从根本上改变了传统的设计方法,极大地促进了制造业的发展和革命。
但与此同时,人们已清楚地认识到:即使系统中的每个零部件都是经过优化的,也不能保证整个系统的性能是良好的,即系统级的优化绝不是系统中各部件优化的简单叠加。
于是,由CAX/DFX等技术发展而来,以系统建模、仿真技术为核心的虚拟样机技术(Virtual Prototyping)得到了迅速发展,并正成为各国纷纷研究的新的热点。
虚拟样机技术(Virtual Prototyping Technology)是当前设计制造领域的一项新技术,其应用涉及到汽车制造、工程机械、航空航天、造船、航海、机械电子、通用机械等众多领域。
它利用计算机软件建立机械系统的三维实体模型和运动学及动力学模型,分析和评估机械系统的性能,从而为机械产品的设计和制造提供依据。
虚拟样机技术可使产品设计人员在各种虚拟环境中真实地模拟产品整体的运动及受力情况,快速分析多种设计方案,进行物理样机而言难以进行或根本无法进行的试验,直到获得系统的最佳设计方案为止。
虚拟样机技术的应用贯穿着整个设计过程中,它可以用在概念设计和方案论证中,设计者可以把自己的经验与想象结合在虚拟样机里,让想象力和创造力得到充分地发挥。
用虚拟样机替代物理样机,不但可以缩短开发周期而且设计效率也得到了很大的提高。
本文以ADAMS为平台,简单说明一下进行虚拟样机的动态仿真分析的一般方法和过程。
2、ADAMS软件简介及特点ADAMS(Automatic Dynamic Analysis of Mechanical System)软件,是由美国机械动力公司(Mechanical Dynamics Inc,现已经并入美国MSC公司)开发的最优秀的机械系统动态仿真软件,是目前世界上最具权威性的,使用范围最广的机械系统动力学分析软件,在全球占有率最高。
基于ADAMS和MATLAB的机器人联合运动仿真
三角 函数有关 , 其位移 函数是正 弦函数和余 弦函
第2 期
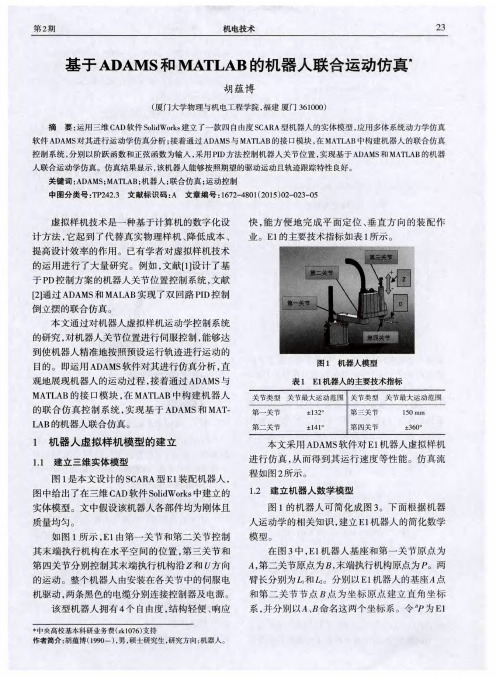
胡蕴博 : 基
A D A MS 和 MA T L A B的机器人联合运动仿真
器 人第 四关 节 上 的末 端执 行 器 L S 3 一 S H A F T ( 根 据 实 际 工作 需 求 设 计 ) 能 在许 用 范 围 内 的水 平 面 上
1 L 0 l
o - J
' ]
( 1 )
约束副。由图4 可 以看 出 , E 1 机 器 人虚 拟 样 机模 型 包含 6 个 约束 副 , 分别由3 个 固定副 、 2 个 旋转 副
及1 个 平 面副组 成 。
I 1 c o s 1 I
脚 c=
l L L 0 s i n 0 j l
实现匀速位移 , 这需要第一关节和第二关节协调
配 合才 能实 现 。 本 文 的仿 真 分 析 将 探 究 L S 3 一 S HA F T在 水 平 面 上 匀 速运 动 时 , E1 机器 人 第 一关 节 和 第 二关 节 之 间的相互 运 动关 系 。 为 了满 足上 述研 究 要求 , 在A D AMS 中将 机器
l 在 A D A M s 中 对 E 1 机 器 人 施 加 约 束 和 驱 动
设置机器人仿真运行参 数
由于 S o l i d Wo r k s 和A D A MS 之 间不 能 进 行 无 缝连接 , 直 接 将 机 器 人 的三 维 实体 模 型 导 人 A D .
A M S 中会 造成 图形 元素 的丢失 。故先 在 S o l i d —
Wo r k s 中将 机 器 人 的 三 维 实 体 模 型 文 件 转 换 为 P a r a s o l i d 格式 , 再 通 过 AD A MS / Vi e w窗 口中 的 I m —
基于ADAMS的工业机器人建模与动力学仿真
基于ADAMS的工业机器人建模与动力学仿真作者:刘佩森靳杏子郑翔鹏朱迪来源:《成都工业学院学报》2018年第04期摘要:为了提升工业机器人工作效率和运动性能,以6自由度工业机器人为研究对象,选用拉格朗日力学分析法进行动力学仿真。
使用三维设计软件SolidWorks对其进行结构建模,并通过接口导入ADMAS仿真软件中,运用动力学方程,并添加驱动,最终获得重要组件的特性曲线图,完成动力学仿真过程。
关键词:工业机器人;动力学仿真;虚拟样机建模;拉格朗日力学分析法中图分类号:TH1132文献标志码:A文章编号:2095-5383(2018)04-0010-04根據美国国家标准局(NBS)和国际标准化组织(ISO)的定义,工业机器人是指面向工业领域的多关节和多自由度的拟人操作臂,是具有编程能力并在自动控制下实现预期功能的机械装置[1]。
其典型应用包括抓取、焊接、搬运、配送、涂胶、喷涂、打磨、装配、检测和感知等[2]。
工业机器人是国家的高科技水平、制造业先进能力和综合国力的标志之一[3]。
工业机器人操作臂的主要类型包括笛卡尔型、关节型、SCARA(Selective Compliance Assembly Robot Arm,平面关节型)、球面坐标型、圆柱面坐标型和并联结构型等。
其中关节型操作臂的所有关节全部可以旋转,具有结构紧凑,空间施展范围大等优点,应用最为广泛。
但是关节型操作臂是复杂的动力学系统,其多个输入与输出之间的耦合关系存在复杂的动力学求解问题[4]。
工业机器人的结构设计较为成熟,而技术难点集中在动力学研究。
动力学研究是为了优化结构设计,修正运动控制过程,提高实时控制能力,进而达到运动学的最优化控制,改善系统运动性能[5]。
动力学分析方法主要有拉格朗日法[6]、凯恩法、牛顿欧拉法[7]、高斯方法、旋量法等。
动力学研究主要借助计算机软件进行动力学仿真,常用的动力学仿真软件包括ADAMS、DADS、RecurDyn和Simpack等。
机器人设计与仿真基于Adams与Matlab的案例分析与实现
机器人设计与仿真基于Adams与Matlab的案例分析与实现机器人设计与仿真是现代机器人工程领域的核心内容。
这个系列课程旨在帮助学习者掌握使用Adams和Matlab工具进行机器人设计、建模、控制算法开发和仿真分析的技能。
通过理论讲解和实践案例分析,学习者将了解机器人设计的基本原理和方法,并学会将其应用于实际机器人项目中。
课程共分为:基础篇以机械结构中常见机构为仿真示例,其中包含了平面四杆机构、凸轮机构、滑轮组、带传动、齿轮传动等,讲解了Adams/View的操作技巧和实战运用。
学员可:1、掌握Adams/View仿真基本流程。
2、掌握机械结构中常见机构的工作原理。
3、熟练Adams/View在机械系统仿真时常用模块及功能。
4、掌握在Adams中建立柔性体的流程。
5、熟悉Adams和MATLAB机电联合仿真技巧。
强化篇结合串联机器人、并联机器人、特种机器人及机器人控制系统的相关理论知识,运用MATLAB及Adams软件的编程和动力学仿真的强大功能,快速入门机器人领域。
学员可:1、熟悉机器人相关理论知识;2、掌握机器人基础性分析流程3、掌握MATLAB和Adams软件联合验证仿真以串联机器人作为机器人领域的入门,本小节主要以串联机器人的运动学建模、雅可比矩阵及奇异性分析、工作空间分析、轨迹规划及动力学分析为核心内容,通过理论建模,MATLAB编程计算,Adams仿真求解验证的方式,帮助各位学员更加深入理解机器人的基础理论知识。
以并联机器人中两种常见机器人(Delta、Stewart)为主要研究对象,讲解了并联机器人的基础性理论知识和仿真流程,同时,对Stewart平台通过MATLAB编程的方式进行了结构优化,通过Adams的仿真验证了优化结果。
简介特种机器人的发展状况,以四足机器人为研究对象,对其进行了运动学分析和关节空间轨迹规划,在通过MATLAB和Adams联合仿真的方式实现了四足机器人的行走。
基于ADAMS的仿人机器人步态规划算法仿真和实现
别描述踝关节和髋关节的空间位置, 其中X(、 ) ( a) Y【、 f t f )
和 x( y( 、z( 分 别 表 示 踝 关 节 和 髋 关 节 在基 坐 标 系 h O、 hO h) t
∑ 。 + k m g ∑ 。 (
一 。西 ∑: ,
0 一 Y 中的坐标值。 f 。 XZ 【表示踝关节与地面的夹角, (表 ) f )
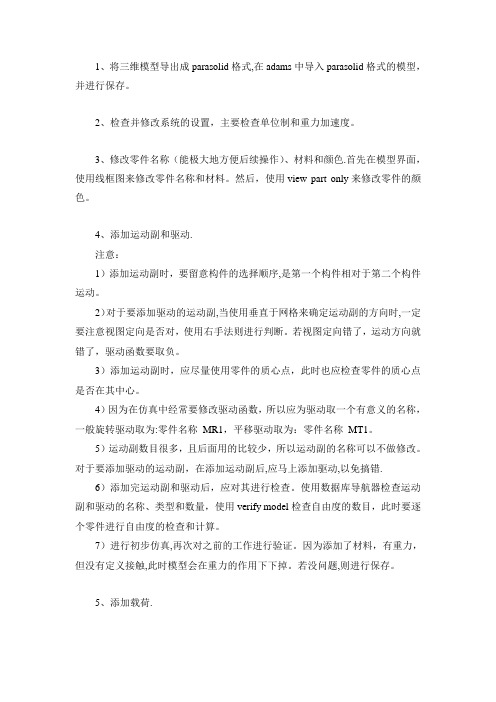
由图 4 1可 以看 出,所设计和实现 的步态规 划算法在 .
A MS上 进 行 步 态 仿真 后 ,成 功 的应 用 到 MI I ,并 能 DA H.上
AD AMS建立 了 MI Hq的虚拟原理样机系统 , 然后在其上进
行 了基于 Z MP的仿人机器人步态算法仿真 ,并最终将通过 仿真的算法运用到 MI 4 的物 理样机上 ,实现 了稳定 的步 H 态行走,既保护 了 MI I物理样机不受破坏 ,又便于进行 H— 算法分析,具有很好 的应用效果 。
腿 部 高 度 先 下 蹲 到 其 总 高度 的 8% ,设 定 的 步 态周 期 为 3 0 秒 , 步长 为 1 米 ,并 生 成 了步 态 规 划 数据 文 件 0厘 然 后 将 在 Ma a t b中生 成 的 MI I 部 的 l l H-腿 0个关 节 的 角
图 22 仿 人 机 器人 步 态 参 数 -
・
后纵深距离为 2 8 0mm,身体总重 2 k 不包括 电池 ) 其外 6 g( 。 形 尺 寸 图 如 图 21 示 。 .所
3 实 验 效 果 2
在进行仿人机器人 MI . 行走实验前 ,先将基于 Z HI MP 的步态规划算法生成的离线步态数据文件转化为 ML - H I上 的运动控制系统实时层可 以发送 的文件格式 。 然后在对仿人
机器人技术课程设计_基于Adams的五自由度机器人运动学仿真
机器人技术课程设计_基于Adams的五自由度机器人运动学仿真1. 课程设计目标本机器人技术课程设计的目标是基于Adams软件进行五自由度机器人运动学仿真,使学生能够掌握机器人的基本运动学概念、运动学方程和仿真方法。
通过课程的学习,学生将能够学习如何使用Adams仿真工具设计机器人运动学仿真,并能够理解机器人的基本运动学概念,包括机器人坐标系、机器人关节角度和机器人末端位姿等相关知识。
2. 课程设计内容本课程设计主要包括以下内容:2.1 机器人运动学基础知识介绍机器人的运动学基本概念,包括机器人坐标系、机器人关节角度和机器人末端位姿等相关知识。
学生通过理论学习和实际操作,掌握机器人基本运动学方程和计算方法。
2.2 Adams软件基础知识介绍Adams仿真软件的基本操作和使用方法,包括建模、仿真模拟、仿真结果分析等。
2.3 五自由度机器人运动学仿真实验设计结合机器人运动学概念和Adams软件的基础操作,设计五自由度机器人运动学仿真实验。
实验过程中,学生需要完成机器人模型的建立、参数设置、速度、加速度、位移等仿真参数的设置以及仿真结果的分析。
3. 课程设计过程3.1 建立五自由度机器人模型首先,通过Adams软件建立五自由度机器人的模型。
将机器人分解为关节和机械臂两个部分,建立关节和机械臂的零件模型,并设置零件的各项参数,包括初始速度、初始加速度、初始位移和初始角度等。
通过Adams软件的自动计算功能,计算出关节角度和末端位姿等参数。
3.2 计算机器人的运动学参数根据机器人模型的建立,计算机器人的运动学参数。
通过建立机器人坐标系、关节坐标系和末端位姿等参数,计算出机器人的各项运动学参数。
3.3 进行机器人运动学仿真实验在Adams仿真软件中进行机器人运动学仿真实验。
设置仿真实验的各项参数,包括仿真时间、仿真步长、仿真器件和仿真结果的分析等。
在仿真实验中,观察五自由度机器人的运动轨迹和末端位姿等参数,分析机器人的运动学性能,并根据仿真结果进行调整和优化。
Adams动力学仿真分析的详细步骤
1、将三维模型导出成parasolid格式,在adams中导入parasolid格式的模型,并进行保存。
2、检查并修改系统的设置,主要检查单位制和重力加速度。
3、修改零件名称(能极大地方便后续操作)、材料和颜色.首先在模型界面,使用线框图来修改零件名称和材料。
然后,使用view part only来修改零件的颜色。
4、添加运动副和驱动.注意:1)添加运动副时,要留意构件的选择顺序,是第一个构件相对于第二个构件运动。
2)对于要添加驱动的运动副,当使用垂直于网格来确定运动副的方向时,一定要注意视图定向是否对,使用右手法则进行判断。
若视图定向错了,运动方向就错了,驱动函数要取负。
3)添加运动副时,应尽量使用零件的质心点,此时也应检查零件的质心点是否在其中心。
4)因为在仿真中经常要修改驱动函数,所以应为驱动取一个有意义的名称,一般旋转驱动取为:零件名称_MR1,平移驱动取为:零件名称_MT1。
5)运动副数目很多,且后面用的比较少,所以运动副的名称可以不做修改。
对于要添加驱动的运动副,在添加运动副后,应马上添加驱动,以免搞错.6)添加完运动副和驱动后,应对其进行检查。
使用数据库导航器检查运动副和驱动的名称、类型和数量,使用verify model检查自由度的数目,此时要逐个零件进行自由度的检查和计算。
7)进行初步仿真,再次对之前的工作进行验证。
因为添加了材料,有重力,但没有定义接触,此时模型会在重力的作用下下掉。
若没问题,则进行保存。
5、添加载荷.6、修改驱动函数.一般使用速度进行定义,旋转驱动记得加d。
7、仿真。
先进行静平衡计算,再进行动力学计算。
8、后处理。
具体步骤如下:1)新建图纸,选择data,添加曲线,修改legend。
一般需要线位移,线速度,垂直轮压和水平侧向力的曲线。
2)分析验证,判断仿真结果的正确性(变化规律是否对,关键数值是否对)。
3)截图保存,得出仿真分析结论.。
基于SolidWorks与Adams的焊接机器人动力学仿真

基于SolidWorks与Adams的焊接机器人动力学仿真
龚龙;张春雷
【期刊名称】《中国西部科技》
【年(卷),期】2015(000)007
【摘要】本文先用拉格朗日法对一款六自由度焊接机器人进行动力学分析,得出该机器人各个关节的峰值力矩理论值。
并运用SolidWorks建立了该款机器人的三维装配模型,将其导入到Adams后进行动力学仿真分析,在Adams中仿真出焊接机器人在不同工况下各个运动情况,得出各个关节处的力矩图。
并将仿真出的峰值力矩与所求的理论峰值力矩对比,验证仿真数据的正确性。
将仿真结果与该机器人各个驱动关节处电机经减速器减速后的输出力矩对比,验证电机选型的合理性。
【总页数】4页(P36-39)
【作者】龚龙;张春雷
【作者单位】四川大学制造科学与工程学院,四川成都 610065;四川大学制造科学与工程学院,四川成都 610065
【正文语种】中文
【相关文献】
1.基于ADAMS的柔性焊接机器人动力学仿真 [J], 彭礼辉;李光;刘领化
2.基于SolidWorks和ADAMS的液压支架动力学仿真 [J], 蔡文书
3.基于ADAMS的液压支架焊接机器人动力学仿真分析 [J], 刘水利;薛力猛;毛清华;马宏伟
4.基于SolidWorks与ADAMS的章动减速器动力学仿真及动态特性分析 [J], 谢
志宇;姚立纲;张俊;蔡永武;吴亚强
5.基于SolidWorks与ADAMS的工业机器人动力学仿真 [J], 贾磊;朱彦齐
因版权原因,仅展示原文概要,查看原文内容请购买。
ADAMS仿真分析及调试
7.3.1 仿真分析和试验工具
仿真 工具
仿 真 分 析 设 置
仿真分析设置
6
7.3.2 仿真分析和试验---互交式、
选择仿真类型
Default默认、Dynamic动力学、Kinematic运动学、Static静态
选择仿真分析时间的定义方法,输入仿真分析时间
• End Time --义时间间隔
8
7.3.4 管理仿真结果
管理仿真结果
• ADAMS仅保存最后一次的仿真分析结果 • 可以利用保存命令将所需的仿真结果存入数据库 • 或从数据库删除结果
仿真分析控制参数设置
• 设置对话框 • 控制仿真显示 • 设置ADAMS/View输出 • 改变仿真求解设置
9
7.4调试样机
仿真开始之前的样机调试
• 利用数据库管理的对象拓扑命令 • 表格编辑器检查所有的对象有关定义
在互交式仿真过程中调试样机-----仿真调试程序
• Setting菜单 → Solver项 → Debugging →调试程序对话框 • 选择Enable Debugger → 启动仿真调试程序 • 选择仿真调试程序跟踪的对象
在进行动力学分析之前,先进行静态分析,以排除系统 在启动状态下的一些瞬态响应。
4
7.3 样机仿真分析和试验
ADAMS/View自动地调用ADAMS/Solver求解程序,再由 ADAMS/Solver完成以下4种类型的仿真分析:
动力学分析---- Dynamic 运动学分析---- Kinematic 静态分析 ---- Static 装配分析 ---- Assemble
3
7.2 检验样机模型
利用模型自检工具,检查不恰当的连接和约束、没有约 束的构件、无质量构件、样机的自由度等。
adams运动仿真分析

基于Adams的机器人仿真xxxxxx.xx摘要:机器人是高级整合控制论、机械电子、计算机、材料和仿生学技术的产物,用来协助或代替人类工作。
机器人可用于生产制造业,可以替代人从事危险的工作。
它在制造业、医学、农业、建筑业甚至军事等领域中均有重要用途,研究和开发一套机器人仿真系统是非常必要的。
adams是虚拟样机领域非常优秀的软件,它能根据实际运动系统建造仿真虚拟样机,在物理样机建造之前分析出系统的工作性能,并能方便地改进和优化。
本文简要分析了虚拟样机技术和机器人国内外发展的现状和趋势并提出阐述了研究意义。
关键词:机器人,虚拟样机,仿真,adamsThe Robot Based On Adams SimulationWu XiaoyongWuhan Polytechnic University . WuhanAbstract: the robot is advanced integration of cybernetics, machinery and electronics, computer, material and the product of bionics technology, used to assist or replace human work. The robot can be used in the production of manufacturing industry, can replace people engaged in dangerous job. It in manufacturing, medicine, agriculture, construction and even military, etc all have important USES, research and develop a set of robot simulation system is very necessary. Adams virtual prototype field is very good software, it can according to the actual motion system building simulation in virtual prototype, physical prototype was built before the analysis of system performance, and can easily improvement and optimization. This paper briefly analyzes the virtual prototype technology and the present situation of the development of robots at home and abroad and the trend and puts forward the significance of the research paper.Keywords: robot, virtual prototype, simulation, Adams0.引言机器人技术是近几十年来迅速发展起来的一门高技术,它综合了机械与精密机械、微电子与计算机、自动控制与驱动、传感与信息处理以及人工智能等多种学科的最新研究成果,是典型的机电一体化技术,是目前科技发展最活跃的领域之一。
基于ADAMS的弧焊机器人运动仿真
基于ADAMS的弧焊机器人运动仿真
熊震宇;陈焕明;葛杨
【期刊名称】《计算机工程与应用》
【年(卷),期】2005(041)011
【摘要】机器人三维运动仿真是当前机器人研究领域中重要的研究方向之一.采用CAD软件Pro/E和机械系统动力学仿真软件ADAMS,对德国CLOOS公司生产的76AW型弧焊机器人建立了三维运动仿真模型.采用Denavit-Hartenberg方法建立了连杆坐标系下的机器人运动学模型,并采用Marlab编写了运动学正、逆解的程序.详细阐述了模型的建立方法及具体过程,实现了在ADAMS环境下的机器人焊缝路径的运动仿真.为机器人动力学及离线编程技术的研究提供了基础.
【总页数】3页(P166-167,213)
【作者】熊震宇;陈焕明;葛杨
【作者单位】南昌航空工业学院材料科学与工程系,南昌,330034;南昌航空工业学院材料科学与工程系,南昌,330034;南昌航空工业学院材料科学与工程系,南
昌,330034
【正文语种】中文
【中图分类】TP24
【相关文献】
1.基于ADAMS/View的弧焊机器人运动精度可靠性分析方法 [J], 李昌;王炳晨;韩兴;于晓光
2.基于Internet的弧焊机器人远程运动仿真与控制 [J], 陈文杰;陈善本;林涛
3.基于UG的弧焊机器人模型装配与运动仿真 [J], 冯胜强;胡绳荪;申俊琦
4.基于Pro/E和ADAMS的背罐车翻转机构运动仿真及优化设计 [J], 陈子银;杨海峰;李瑞锋
5.基于ADAMS的弧焊机器人动力学仿真 [J], 沈红芳;宋又廉
因版权原因,仅展示原文概要,查看原文内容请购买。
基于ADAMS+MATLAB的移动焊接机器人运动仿真
基于ADAMS+MATLAB的移动焊接机器人运动仿真
王帅;张华;叶艳辉
【期刊名称】《制造业自动化》
【年(卷),期】2015(000)005
【摘要】基于虚拟样机技术对在狭小空间内实现焊接自动化的移动焊接机器人进行研究。
采用两自由度轮式移动平台,与万向球形成三点支撑,十字滑块作为二级精确运动平台,配合旋转电弧传感器可完成对平面焊缝的精确跟踪。
建立了移动焊接机器人数学模型并讨论其运动学方程。
在ADAMS中建立虚拟样机并验证其正确性。
针对本移动焊接机器人机构特点,采用ADAMS+MATLAB联合仿真技术对移动焊接机器人移动平台进行分析,使用PID控制对两驱动轮转速进行仿真控制,仿真得出了速度响应曲线,为物理样机实验提供了理论基础。
【总页数】4页(P28-31)
【作者】王帅;张华;叶艳辉
【作者单位】南昌大学江西省机器人与焊接自动化重点实验室,南昌 330031;南昌大学江西省机器人与焊接自动化重点实验室,南昌 330031;南昌大学江西省机器人与焊接自动化重点实验室,南昌 330031
【正文语种】中文
【中图分类】TP391
【相关文献】
1.基于单层神经元的移动焊接机器人焊缝跟踪方法研究 [J], 王霄霞
2.基于ADAMS/View明弧焊接机器人运动仿真分析 [J], 韩兴;李昌;于晓光;赵广兵
3.基于UG的焊接机器人装配及运动仿真 [J], 段丽媛;贺福强;管琪明
4.基于虚拟样机的六自由度弧焊接串联机器人的运动仿真 [J], 曲令晋;王兴举;刘伟
5.基于旋转电弧下移动焊接机器人焊缝跟踪 [J], 黄武奇
因版权原因,仅展示原文概要,查看原文内容请购买。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第21卷第12期2004年12月机 械 设 计JO UR NAL OF M ACHIN E DESIGNVol.21 N o.12Dec. 2004ADAM S在弧焊机器人运动学中的仿真分析和应用沈红芳1,郑建荣2(1.上海电机技术高等专科学校机械系,上海 200240; 2.华东理工大学机械学院,上海 200237)摘要:弧焊机器人的操作臂可以看成是一个含局部闭链结构的开式运动链,采用Denav it-Hartenberg方法建立弧焊机器人的坐标系,建立操作臂的运动学方程。
用A DA M S软件测量输出及仿真分析功能对机器人运动学正、逆问题进行分析和研究。
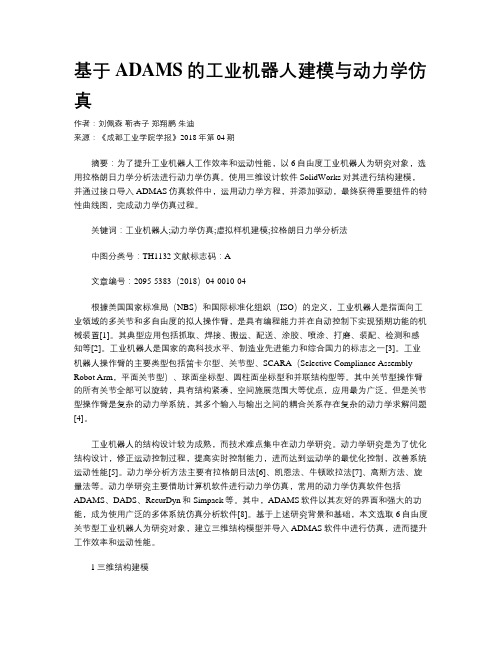
关键词:逆运动学;A DAM S;仿真分析中图分类号:T H165 文献标识码:A 文章编号:1001-2354(2004)12-0050-03这里讨论的机器人是一个6自由度的关节坐标型弧焊机器人,用于电梯链轮主轴颈与轮毂的焊接。
由9大构件和9个关节组成。
9大构件分别为基座(构件0)、腰(构件1)、下臂(构件2)、上臂(杆4 )、手腕(翻滚,构件7)、手腕(摆动,构件8)、手腕(俯仰构件9)、曲轴2 和拉杆3 ;9个关节则指上述各构件间的转动连接,关节变量分别为 1, 2, 3, 4, 5, 6, 2 , 3 , 4 。
1 弧焊机器人坐标系的建立用基于D-H方法建立了弧焊机器人中各构件坐标系,连基坐标在内,共有10个坐标系,如图1所示。
弧焊机器人的操作臂可以看成是一个含局部闭链结构的开式运动链。
它是由一系列连杆通过转动关节连接而成,其一端固定在基座上,另一端安装着末端执行器(焊枪),用以完成焊接作业。
关节由驱动器驱动,关节的相对运动导致连杆的运动,使手爪到达所需的位姿。
2 运动学方程利用机器人手爪位姿的描述方法,可以用位置矢量0P6o表示弧焊机器人末端手腕的位置,用旋转矩阵06R表示末端手腕的方位。
于是得到机器人手的末端相对于参考坐标系的变换60A: 6A=6R0P6o0001=n x o x a x p xn y o y a y p yn z o z a z p z0001(1)式(1)即为弧焊机器人的运动学方程,它表示了机器人末端手腕的位姿与6个主关节变量之间的关系。
若已知弧焊机器人6轴转角 1, 2, 3, 4, 5和 6,由运动方程式(1),可计算出手臂变换矩阵60A的各个元素。
图1 弧焊机器人坐标系(1)虚拟样机的动力学仿真显示,与渐开线齿轮传动一样,长幅外摆线圆弧齿传动重合度小于2,单齿啮合区大,此时的啮合作用力较大。
应该设法从齿形替代与增齿两种途径入手,扩大双齿啮合区,以改善轮齿受力状况。
(2)运用A DA M S动力学仿真分析软件与U G,Pro/E, Solidwor ks相结合,建立起长幅外摆线行星传动的仿真分析模型是有效的。
所提供的仿真平台为物理样机的设计和制造提供了有价值的理论依据。
参考文献[1] Edw ard V Sundt.摆线齿轮减速机[P].美国:3037400,1962,6[2] 大池洋三,芹川孝夫.高性能圆弧齿形冕轮减速器[J].机械设计(日),1976(1):113-117.[3] 王厚宽,裘建新.链条少齿差行星减速器[P].实用新型专利:87208342,1987,5.[4] 王厚宽,裘建新.K-H-V链条圆弧齿行星传动[J].机械设计,1989,9(4):11-16.[5] 王厚宽,王卫荣.链条少齿差行星减速机的研究及其CAD[J].机械工程学报,1994,30(4):76-82.[6] 石永刚.多圆弧针轮行星传动[J].机械工程学报,1996,32(2):25-33.[7] 李伟,等.行星摆线针轮减速器虚拟样机模型的建立[J].中国农业大学学报,2002,7(6):61-63.收稿日期:2004-03-26;修订日期:2004-07-01作者简介:沈红芳(1972-),女,江苏兴化人,工学硕士,讲师,专业方向:弧焊机器人虚拟样机设计与研究及机电一体化技术。
实际上,也可以用RP Y角法来描述机器人手末端的方位。
设定机器人手末端坐标系{6}最初与基坐标系{0}重合,然后将{6}相对于{0}以z-y-x即321的顺序旋转,即首先将{6}绕z0旋转 角,再绕y0旋转角,最后绕x0旋转!角,得相应的旋转矩阵:6R zyx( ,,!)=R(x0,!)R(y0,)R(z0, )=c c-s c sc s s!+s c!-s s s!+c c!-s!c-c s c!+s s!s s c!+c s!c c!=r11r12r31r21r22r32r31r32r33(2)式中:c余弦函数cos;s正弦函数sin。
3 运动学问题求解若机器人基坐标系{0}相对于参考坐标系(工作站){S}的变换矩阵为S0A,而手爪中所持焊枪相对于末端手腕变换矩阵为6T A,那么,焊枪T相对于参考坐标系(或工作站)S的位姿为:ST A=SA06A6TA(3)根据式(3),如果工具坐标系{T}相对腕部坐标系{W}= {6}的变换6T A已知,机器人相对工作站坐标系{S}的位姿S0A 已知,则工具坐标系{T}相对工作站{S}的位姿S T A即可求出。
根据关节变量 i(i=1,2,!,6)的值,利用运动学方程(1),便可计算出手臂变换矩阵06A的各个元素。
得到手末端相对于基座(或工作站)的位姿。
这称为运动学正问题求解。
反之,为了使机器人所持焊枪相对工作站的位姿满足给定的要求,计算相应的关节变量,称为运动学逆问题求解。
4 ADAM S仿真分析及结果研究以上,通过建立操作臂的运动方程,得出了机器人手的末端位姿与操作臂各关节变量及连杆参数之间的关系。
在此,可以利用ADAM S/V IEW的测量和仿真输出功能,对上述结果进行仿真分析和研究。
在ADAM S/V IEW中建立好样机的机械模型后,给样机的各轴施加载荷。
设定腰部(w aist)、下臂(link1)和曲柄(link2)的驱动力矩分别为t1,t2和t3,而腕部(wrist1、wrist2、wrist3)的驱动力矩设为t4,t5和t6。
其中,这6个驱动力矩设为6个状态变量,与ADAM S/CON T ROL模块及M AT L AB软件进行机电一体化系统仿真联合分析。
在V IEW模块中设定测量输出6个主关节变量即 i的值,同时测量输出机器人手末端按321顺序相对于基座坐标系旋转的RPY角以及机器人手末端相对于基座坐标的位移在3个坐标轴上的投影d x,d y和d z。
图2、图3分别表示了机器人手末端RP Y角在仿真时间内与各构件关节转角的关系。
图2中,横标表示仿真时间(s),由驱动函数及各关节变量范围决定。
纵标表示角度(∀)。
图2中的曲线2,5,6分别表示机器人手末端在仿真时间内相对基座坐标系的旋转角度pitch,yaw,roll角的变化情况。
曲线1表示在同一仿真时间内腰部回转角度的变化值,同样,曲线3和4表示下臂和曲柄回转角度随时间的变化情况。
由于设定下臂和曲柄的驱动力矩相同,因而,在图2中,曲线3和曲线4是重合的。
图2 机器人手末端RPY角与构件1,2,2 绕各轴转角的关系图3中,表示在仿真时间内,机器人手RPY角与3个腕关节转角的关系。
图3 机器人手末端RPY角与构件7,8,9绕各轴转角的关系图4和图5则表示了在同一仿真时间内机器人手的末端相对于基座坐标系移动的位移在3个坐标轴上的投影d x,d y, d z与各轴转角的关系。
两图中,横标表示仿真时间(s)。
左列纵标表示位移(mm)。
右列纵标表示角度(∀)。
图4 机器人手末端位移与构件1,2,2 绕各轴转角的关系以上4图也可以合并成一个图形,即反映了在仿真时间内任一时刻机器人手末端的位姿与各轴转角的关系。
如:在仿真时间0.1s时,从图2~图5中可以看出,此时,机器人手末端的位姿与各轴转角数值如表1所示。
512004年12月沈红芳,等:A DA M S在弧焊机器人运动学中的仿真分析和应用第21卷第12期2004年12月机 械 设 计JO UR NAL OF M ACHIN E DESIGNVol.21 N o.12Dec. 2004履带车辆悬挂系统磁流变液减振器的研究李猛,吕建刚,张进秋(军械工程学院火炮工程系,河北石家庄 050003)摘要:履带车辆被动式悬挂系统的设计是在某一确定的常用车速和地表形状下,确定系统的弹簧刚度和阻尼系数等基本参数以达到其工作性能的最佳化,对工况的适应性较差。
建立在减振器基本结构形式不变的前提下,采用磁流变液减振器的半主动悬挂系统,可以使车辆在各种工况下都保持其耗能减振性能的最优化。
通过理论分析,这种叶片式M RF 减振器提供的阻尼力可完全替代原减振器,并具有更优良的控制性和适应性。
关键词:减振器;半主动悬架;磁流变液;履带车辆中图分类号:T J811文献标识码:A 文章编号:1001-2354(2004)11-0052-04要进一步提高现代履带车辆的行驶速度,不仅仅是增加发动机功率,一个重要的制约因素就是地面激励所引起的振动问题没有很好的解决。
要保证履带车辆必要的行驶平稳性,保证乘载人员维持必要的战斗力和工作能力所需的舒适性,现有的悬挂系统是不能满足未来战争对先进作战车辆需要的。
另外,现代装甲车辆都有很完备的火控系统,可以实现行进间射击,如果改进悬挂系统的平稳性,对提高坦克、自行火炮等战斗车辆的行进间射击精度,缩短射击反应时间等将大有益处。
因此,改进和研制新型的履带车辆半主动式悬挂系统,对提高作战车辆的机动与火力性能具有重要的军事意义。
1 履带车辆被动式悬挂系统减振器的结构分析履带车辆悬挂系统的减振器多采用旋转叶片式液力减振器。
其工作原理为,当行驶中负重轮受到冲击向上运动时,拉臂使连接臂、叶片总成扭转,叶片向隔板靠拢,使高压腔内液体产生高压,经减压阀上的固定孔,使高压油流入低压腔。
当固定孔溢流来不及,油压上升使弹簧压缩,减压阀门打开,液压油可较多地涌入低压腔。
当负重轮向下运动时,拉臂使连接臂、叶片总成向反方向扭转,减压阀门关闭,低压腔内的液压油只能通过固定孔流入高压腔。
液压油在通过固定孔、阀门时阻力增大,压力升高,温度上升,使负重轮的冲击能量转化成热能。
所以减振器工作过程中主要依靠减压阀进行耗能减振。
减压阀的原理如图1所示:从其工作原理可以看出,减振器耗能主要依靠液体流过减压阀时产生的压力损失完成的。
其计算公式为:图5 机器人手末端位移与构件7,8,9绕各轴转角的关系这样,在任一时刻,若已知各主动关节变量的取值,即可求得末端的位姿。
反之,对应于机器人手末端的每一个位姿,都能从图中求得相应的关节转角的值。
这个结果也可用于验证运动学方程的正解和反解。
表1 在0.1s时机器人手末端位姿与各主动关节转角的关系机器人手末端0.1s时位姿各主动关节0.1s时转角d x-788.8mm Waist116.6∀d y-609.1mm Link1-8.6∀d z138.5mm Link2-8.6∀Roll-115.1∀W rsit117.1∀Pi tch52.0∀W ri st2-35.3∀yaw-9.5∀W ri st329.8∀参考文献[1] 郑建荣.ADAM S虚拟样机技术入门与提高[M].北京:机械工业出版社,2002.[2] 熊有伦,等.机器人学[M].北京:机械工业出版社,1993.[3] 蔡自兴.机器人学[M].北京:清华大学出版社,2000.[4] 金万敏,等.机器人机械学[M].南京:江苏科学技术出版社,1994.[5] 赵锡芳.机器人动力学[M].上海:上海交通大学出版社,1992.[6] 王庭树.机器人运动学及动力学[M].西安:西安电子科技大学出版社,1990.收稿日期:2004-03-22;修订日期:2004-06-24作者简介:李猛(1980-),男,江苏连云港人,硕士研究生,专业方向:车辆工程。