非车载充电机(充电桩)与BMS(电池管理系统)通讯协议解析——CANScope协议解析功能介绍
充电机与BMS通讯报文分析说明
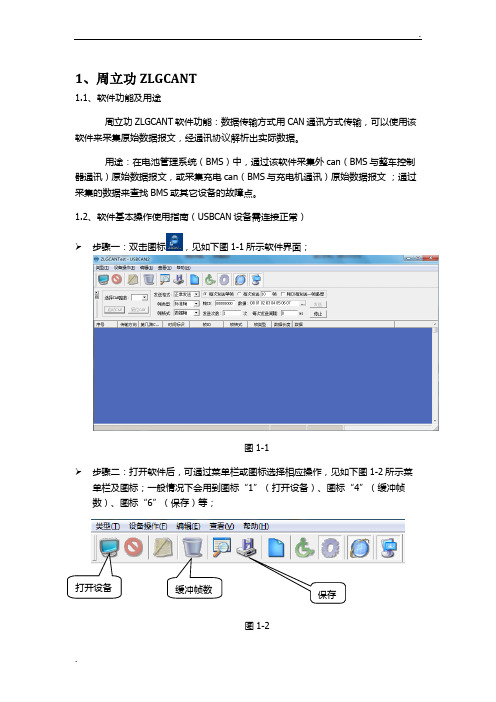
1、周立功ZLGCANT1.1、软件功能及用途周立功ZLGCANT 软件功能:数据传输方式用CAN 通讯方式传输,可以使用该软件来采集原始数据报文,经通讯协议解析出实际数据。
用途:在电池管理系统(BMS )中,通过该软件采集外can (BMS 与整车控制器通讯)原始数据报文,或采集充电can (BMS 与充电机通讯)原始数据报文 ;通过采集的数据来查找BMS 或其它设备的故障点。
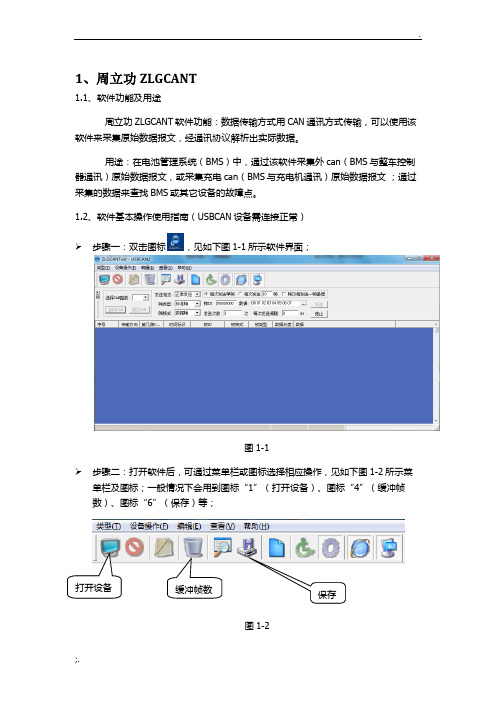
1.2、软件基本操作使用指南(USBCAN 设备需连接正常) ➢ 步骤一:双击图标,见如下图1-1所示软件界面;图1-1➢ 步骤二:打开软件后,可通过菜单栏或图标选择相应操作,见如下图1-2所示菜单栏及图标;一般情况下会用到图标“1”(打开设备)、图标“4”(缓冲帧数)、图标“6”(保存)等;图1-2打开设备缓冲帧数保存➢步骤三:通过菜单栏“设备操作”中选择“打开设备”,或点击图标“1”打开设备,通常情况下只选择相应CAN网络的波特率,其它参数均为默认值,然后点击“确认”,见如下图1-3所示;注:BMS内can波特率为500kbps,外can波特率为250kbps,充电can波特率为250kbps;其它can网络根据实际波特率选择。
选择相应波特率图1-3➢步骤四:设备参数配置完成后,通过菜单栏“编辑”中选择“缓冲帧数”,或点击图标“4”缓冲帧数,通常情况下将缓冲帧数改为最大“1000000”帧(为保证数据完整性),然后点击“确认”,见如下图1-4所示;缓冲帧数更改到最大1000000图1-4➢步骤五:点击“启动CAN”按钮,数据开始收集,见如下图1-5所示;点击“启动can”按钮图1-5➢步骤六:数据收集完成后,点击图标“6”保存按钮,文件命名(格式如“年-月-日-车牌编号”),选择保存路径,然后点击“保存”,见如下图1-6所示;点击“保存按钮”文件命名格式:年-月-日-车牌编号图1-6➢步骤七:数据保存完毕后,如无需其它操作(继续采集数据),则关闭该软件。
非车载充电机与BMS通信步骤详解
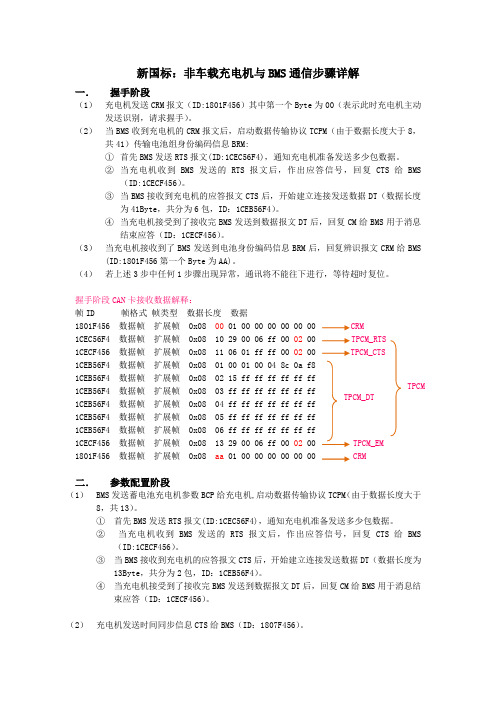
新国标GB/T 27930-2015 国标GB/T 27930-2011:非车载充电机与BMS通信步骤详解一.握手阶段(1)充电机发送CRM报文(ID:1801F456)其中第一个Byte为00(表示此时充电机主动发送识别,请求握手)。
(2)当BMS收到充电机的CRM报文后,启动数据传输协议TCPM(由于数据长度大于8,共41)传输电池组身份编码信息BRM:①首先BMS发送RTS报文(ID:1CEC56F4),通知充电机准备发送多少包数据。
②当充电机收到BMS发送的RTS报文后,作出应答信号,回复CTS给BMS(ID:1CECF456)。
③当BMS接收到充电机的应答报文CTS后,开始建立连接发送数据DT(数据长度为41Byte,共分为6包,ID:1CEB56F4)。
④当充电机接受到了接收完BMS发送到数据报文DT后,回复CM给BMS用于消息结束应答(ID:1CECF456)。
(3)当充电机接收到了BMS发送到电池身份编码信息BRM后,回复辨识报文CRM给BMS ( ID:1801F456 第一个 Byte 为AA )。
(4)若上述3步中任何1步骤出现异常,通讯将不能往下进行,等待超时复位。
握手阶段CAN卡接收数据解释:充电机:56H,BMS:F4H,FFH(255)为全局地址。
标准中的SPN没有什么实际用处。
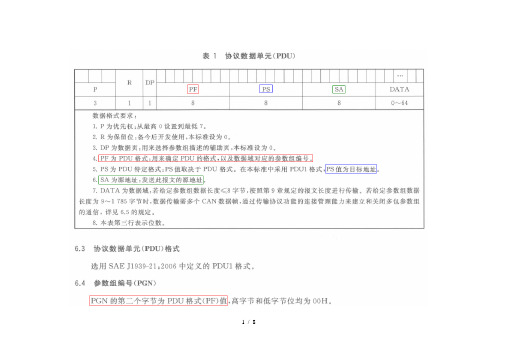
PGN的第二字节处于帧ID的第二个字节(PF)的位置,或多包协议的数据末3字节。
TP.CM:传输协议-连接管理,RTS:发送者,CTS:响应者,DT:数据包,EM:TP.CM_EndofMsgAck,消息结束应答二.参数配置阶段(1) BMS发送蓄电池充电机参数BCP给充电机,启动数据传输协议TCPM(由于数据长度大于8,共13)。
①首先BMS发送RTS报文(ID:1CEC56F4),通知充电机准备发送多少包数据。
②当充电机收到BMS发送的RTS报文后,作出应答信号,回复CTS给BMS(ID:1CECF456)。
新国标非车载充电机与BMS通信协议详解

新国标非车载充电机与BMS通信协议详解随着电动汽车的发展,非车载充电机的应用越来越广泛。
为了保证充电的安全和效率,充电机与电池管理系统(BMS)之间需要进行通信。
因此,新国标出台了非车载充电机与BMS通信协议。
新国标的通信协议主要包括通信协议的物理层、数据链路层和应用层。
首先是物理层,物理层主要定义了通信所需要的硬件电气特性,包括电压、电流、传输速率等。
新国标规定了通信的电压范围为9V到40V,电流范围为0A到50A,传输速率为250kbps到2Mbps。
其次是数据链路层,数据链路层主要负责数据包的传输和错误检测。
新国标使用了CAN总线作为数据链路层的传输介质,CAN总线能够提供可靠的传输和错误检测。
数据包分为两种类型:命令帧和数据帧。
命令帧用于控制充电机的行为,数据帧用于传输电池的状态。
数据包还包括校验码,用于检测数据传输过程中是否出现错误。
最后是应用层,应用层主要定义了充电机与BMS之间的通信协议。
通信协议中包括了多个命令和数据的定义,用于实现充电机和BMS之间的功能交互。
其中,命令包括启动充电、停止充电、查询电池信息等;数据包括电池的电量、电流、电压等信息。
通信协议还定义了命令和数据的格式和长度,以及对应的数据类型和单位。
总的来说,新国标的非车载充电机与BMS通信协议详细规定了通信的物理特性、数据传输方式和通信命令的定义。
这样一来,充电机和BMS之间可以进行可靠、安全、高效的通信,提高了充电的效率和充电系统的安全性。
通过此协议的实施,能够有效促进充电设备的互操作性和标准化,推动电动汽车的发展。
电动汽车非车载传导式充电机与电池管理系统之间的通信协议

电动汽车非车载传导式充电机与电池管理系统之间的通信协议介绍随着电动汽车的普及,非车载传导式充电机成为了一种主要的充电方式。
这种充电方式通过传感器和通信协议实现电能的传导和管理,保证安全和高效的充电过程。
本文将深入探讨电动汽车非车载传导式充电机与电池管理系统之间的通信协议。
传导式充电机与电池管理系统的通信需求电动汽车的非车载传导式充电机需要与电池管理系统进行通信,以实现以下功能:1. 确定电池状态:传导式充电机需要了解电池的充电状态、温度、容量等信息,以确保安全和高效的充电过程。
2. 控制充电过程:充电机需要向电池管理系统发送充电指令,包括充电功率、充电电流等参数,以控制充电过程。
3. 监测充电过程:充电机需要实时监测充电过程中的电流、电压等参数,以确保充电过程的安全和稳定。
通信协议设计为了实现上述通信需求,需要设计一种专门的通信协议。
以下是一个基本的通信协议设计方案:1. 物理层传导式充电机与电池管理系统之间的通信可以采用有线或无线方式,常用的有线方式有CAN总线、RS485等,无线方式有蓝牙、WiFi等。
具体选择哪种方式需要根据实际情况进行评估。
2. 数据链路层在物理层之上,需要设计数据链路层协议来实现数据的可靠传输。
可以使用帧结构来封装数据,并采用差错检测和纠错技术来确保数据的完整性和准确性。
3. 网络层在数据链路层之上,需要设计网络层协议来管理通信的路由和地址分配。
可以为充电机和电池管理系统分配唯一的地址,以确保通信的准确性和安全性。
4. 传输层在网络层之上,可以设计传输层协议来提供可靠的端到端通信。
传输层协议可以基于TCP或UDP,根据实际需要选择合适的协议。
5. 应用层在传输层之上,可以设计应用层协议来定义具体的通信功能和数据格式。
应用层协议可以基于现有的标准协议,如HTTP、MQTT等,也可以根据实际需求设计自定义的协议。
通信协议示例以下是一个基于TCP/IP协议栈的通信协议示例:1. 物理层:有线通信使用CAN总线作为物理传输介质。
新国标:非车载充电机与BMS通信协议详解
新国标:非车载充电机与BMS 通信步骤详解一. 握手阶段(1) 充电机发送CRM 报文(ID:1801F456)其中第一个Byte 为00(表示此时充电机主动发送识别,请求握手)。
(2) 当BMS 收到充电机的CRM 报文后,启动数据传输协议TCPM (由于数据长度大于8,共41)传输电池组身份编码信息BRM:① 首先BMS 发送RTS 报文(ID:1CEC56F4),通知充电机准备发送多少包数据。
② 当充电机收到BMS 发送的RTS 报文后,作出应答信号,回复CTS 给BMS(ID:1CECF456)。
③ 当BMS 接收到充电机的应答报文CTS 后,开始建立连接发送数据DT (数据长度为41Byte ,共分为6包,ID :1CEB56F4)。
④ 当充电机接受到了接收完BMS 发送到数据报文DT 后,回复CM 给BMS 用于消息结束应答(ID :1CECF456)。
(3) 当充电机接收到了BMS 发送到电池身份编码信息BRM 后,回复辨识报文CRM 给BMS(ID:1801F456第一个Byte 为AA)。
(4) 若上述3步中任何1步骤出现异常,通讯将不能往下进行,等待超时复位。
握手阶段CAN 卡接收数据解释:帧ID 帧格式 帧类型 数据长度 数据1801F456 数据帧 扩展帧 0x08 00 01 00 00 00 00 00 00 CRM1CEC56F4 数据帧扩展帧 0x08 10 29 00 06 ff 00 02 00TPCM_RTS 1CECF456 数据帧 扩展帧 0x08 11 06 01 ff ff 00 02 00 TPCM_CTS 1CEB56F4 数据帧 扩展帧1CEB56F4 数据帧 扩展帧1CEB56F4 数据帧 扩展帧 0x08 03 ff ff ff ff ff ff ff 1CEB56F4 数据帧 扩展帧 0x08 04 ff ff ff ff ff ff ff 1CEB56F4 数据帧 扩展帧1CEB56F4 数据帧 扩展帧1CECF456 数据帧 扩展帧 0x08 13 29 00 06 ff 00 021801F456 数据帧 扩展帧 0x08 aa 01 00 00 00 00 00 00 CRM二. 参数配置阶段(1) BMS 发送蓄电池充电机参数BCP 给充电机,启动数据传输协议TCPM (由于数据长度大于8,共13)。
混合动力电动汽车BMS与充电机的CAN总线通信设计

混合动力电动汽车BMS与充电机的CAN总线通信设计CAN总线通信是混合动力电动汽车(BMS)与充电机之间进行数据交换和控制命令传输的关键技术之一、本文将从通信网络拓扑结构、通信协议、通信帧格式、错误处理和性能指标几个方面详细介绍CAN总线通信的设计。
1.通信网络拓扑结构2.通信协议CAN总线通信采用CAN协议进行数据传输。
CAN协议是一种多主控、分布式的实时通信协议,具有高实时性、抗干扰性和高可靠性的特点。
3.通信帧格式CAN总线通信数据采用帧格式进行封装和传输。
CAN总线数据帧分为标准帧和扩展帧两种格式。
标准帧包括帧起始位(SOF)、报文ID(Identifier)、远程传输请求(RTR)、数据域(Data)、CRC校验和(CRC)和帧结束位(EOF)。
扩展帧在标准帧的基础上增加了帧类型位和标识符扩展位。
4.错误处理CAN总线通信在传输过程中可能会出现错误,如数据位错误、CRC校验错误、帧丢失等。
为了提高通信可靠性,需要在设计中考虑错误处理机制,如重发机制、错误帧过滤和错误诊断等。
5.性能指标CAN总线通信的性能指标包括通信速率、通信延迟、通信带宽和网络可扩展性等。
通信速率一般可达到1Mbps以上,通信延迟一般在微秒级别,通信带宽取决于总线负载和通信帧长度,网络可扩展性可通过添加中继器和分支器实现。
综上所述,混合动力电动汽车BMS与充电机的CAN总线通信设计是一项关键技术,通过合理的拓扑结构、协议选择、帧格式定义、错误处理和性能指标优化,可以实现稳定可靠的数据交换和控制命令传输,为混合动力电动汽车的充电过程提供了良好的通信保障。
充电桩BMS通讯协议详解

充电桩BMS通讯协议详解充电桩BMS通讯协议详解1. 引言充电桩是电动汽车的重要设备之一,而其中的BMS(电池管理系统)作为充电桩的核心部件,负责管理和保护电动汽车的电池组。
而充电桩BMS通讯协议则是实现充电桩与电动汽车BMS之间进行数据通信的关键。
2. 充电桩BMS通讯协议的重要性充电桩BMS通讯协议的存在是为了确保充电桩和电动汽车BMS之间的数据传输准确可靠。
通过通讯协议,充电桩可以实时获取到电动汽车的电池状态、充电需求等信息,而电动汽车的BMS也可以通过通讯协议告知充电桩其充电需求和电池的状态。
3. 充电桩BMS通讯协议的分类根据通信方式的不同,充电桩BMS通讯协议可以分为有线通信和无线通信两种形式。
3.1 有线通信有线通信是指通过物理线缆来进行数据传输的方式,常见的有线通信协议包括CAN总线、LIN总线、RS485等。
其中,CAN总线是应用最为广泛的一种通讯协议,能够实现高速、可靠的数据传输。
3.2 无线通信与有线通信不同,无线通信是通过无线信号进行数据传输的方式。
常见的无线通信技术包括蓝牙、WiFi、ZigBee等。
无线通信相比于有线通信具有更大的灵活性和便携性,但在传输速率和稳定性等方面可能存在一定的限制。
4. 充电桩BMS通讯协议的实现方式充电桩BMS通讯协议的实现方式包括硬件和软件两个方面。
4.1 硬件实现硬件实现是指通讯协议所需要的硬件设备和接口。
在充电桩中,常见的通讯接口有CAN、RS485等,通讯模块可以通过这些接口连接到BMS,并进行数据的传输和接收。
4.2 软件实现软件实现是指通讯协议所需要的软件编程和算法。
充电桩通讯协议的设计和实现需要遵循一定的规范和标准,确保数据传输的准确性和可靠性。
常见的通讯协议有ISO 15118、GB/T 18487等,不同的通讯协议有不同的实现方式和要求。
5. 充电桩BMS通讯协议的应用和发展充电桩BMS通讯协议的应用和发展离不开电动汽车行业的快速发展。
非车载传导式充电机与电动汽车之间的数字通信协议第2部

非车载传导式充电机与电动汽车之间的数字通信协议第2部涵盖了充电机与电动汽车之间的通信方式和数据传输格式。
该协议基于CAN(控制器局域网)通信协议制定,采用主从应答模式进行通信。
充电机作为主设备,汽车作为从设备。
充电机向从设备发送的命令都以0x开头,从设备接收到命令后,根据接收到的命令码来确定是否执行命令。
充电机发送的数据位流中包含有充电电流或电压调整步长、通信速率、通信校验等参数,这些参数对从设备的响应和充电控制至关重要。
具体的通信过程包括充电机发送充电控制命令和数据位流、从设备响应并反馈状态信息、充电机根据状态信息进行充电控制等步骤。
在充电过程中,充电机和从设备之间的通信主要用于调整充电电流或电压,以及获取充电状态信息。
以上内容仅供参考,建议咨询专业人士获取更准确的信息。
破解电动汽车和充电桩的通讯协议兼容性问题!
充电桩或电动汽车BMS符合国标GB/T27930 CAN总线通讯协议的一致性认证测试软件介绍基于CANScope分析仪的“BMS充电机测试软件”2014年开始,整个电动汽车行业突飞猛进,把沉寂徘徊多年的电动汽车及其配套产业都带动起来。
一时间做电动车的企业如雨后春笋,同时做充电设备的企业也蜂拥而上,但带来了很多充电CAN总线通讯协议的兼容性问题。
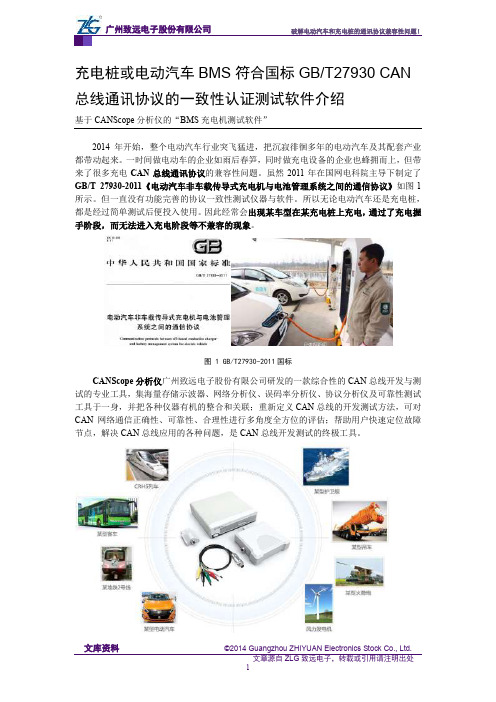
虽然2011年在国网电科院主导下制定了GB/T 27930-2011《电动汽车非车载传导式充电机与电池管理系统之间的通信协议》如图1所示。
但一直没有功能完善的协议一致性测试仪器与软件。
所以无论电动汽车还是充电桩,都是经过简单测试后便投入使用。
因此经常会出现某车型在某充电桩上充电,通过了充电握手阶段,而无法进入充电阶段等不兼容的现象。
图 1 GB/T27930-2011国标CANScope分析仪广州致远电子股份有限公司研发的一款综合性的CAN总线开发与测试的专业工具,集海量存储示波器、网络分析仪、误码率分析仪、协议分析仪及可靠性测试工具于一身,并把各种仪器有机的整合和关联;重新定义CAN总线的开发测试方法,可对CAN网络通信正确性、可靠性、合理性进行多角度全方位的评估;帮助用户快速定位故障节点,解决CAN总线应用的各种问题,是CAN总线开发测试的终极工具。
CANScope的“BMS充电机测试软件”,如图2所示为致远电子与国网电科院合作研发的,对被测充电机或者电动汽车电池管理系统(BMS)进行符合GB/T27930协议的一致性测试软件。
图 2 CANScopeBMS充电机测试软件此软件具备以下四种工作模式:(1)监控测试模式:在此模式下,CANScope作为一台只听设备,监控充电双方的通信,如图3所示。
图 3 监控测试模式选择监控测试启动后,界面中为四个充电过程的流程监控图,实时闪动目前进行的步骤。
如果发生充电过程异常中断,可以自动提示目前中断的位置,便于查找问题原因。
CANScope充电桩行业应用方案

CANScope 充电桩行业应用方案
一、充电桩结构
充电桩内部主要有充电桩控制器、计费单元、充电机等模块组成,主要采用CAN 总线通讯。
其中充电控制器与外部BMS 进行通讯,主要完成充电握手等充电过程。
图1 充电桩内部架构
二、充电桩行业CAN 总线测试要求
1、协议一致性
充电机控制器与BMS 之间CAN 总线通讯必须满足《34658-2017 电动汽车非车载传导式充电机与电池管理系统之间的协议一致性测试》,以此验证充电功能是否正常。
如果没有通过该项目测试,将导致车桩充电时出现充电故障,充不上电乃至更大程度的安全隐患问题。
注:具体要求解读如《充电桩标准解读》所示。
2、国网标准物理层测试要求
充电桩的充电控制器与BMS 通讯是采用CAN 总线,必须满足
《QGDW1591-2014 电动汽车非车载充电机检验技术规范》规定了物理层及链路层测试内容:
物理层测试项目:传输速率测试、信号幅值测试、总线延时测试、总线利用率测试、总线错误率测试、终端电阻变化测试、报文压力测试、抗干扰测试
链路层测试项目:帧格式测试、协议数据单元测试、协议数据单元PDU。
电动汽车电池管理系统与非车载充电机之间的通信协议
电动汽车电池管理系统与非车载充电机之间的通信协议编制说明一、 制定背景和意义电动汽车产业化现阶段面临的最大困难是技术的成熟度问题,要实现产业化,其前提必然是统一的标准和规范。
为保证电动汽车充电设施的规范化和标准化,需制定电动汽车充电通信协议的标准,目前针对电动汽车的非车载充电通信协议国内外没有统一的标准。
本标准的目的就是针对电动汽车非车载充电在行业内形成统一的标准,为建立标准化、规范化的电动汽车充电设施奠定良好的基础。
本标准由全国汽车标准化技术委员会电动车辆分技术委员会动力蓄电池及其应用工作组通讯协议标准起草组负责起草。
二、 制定原则本标准的制定原则是立足国内,参考国际上在该领域的现有成果,结合中国的具体情况,本着科学、开放、适用和促进国内技术发展的原则,对电动汽车电池管理系统与非车载充电机之间的通信协议进行深入研究,制定出适合我国国情并且反应国内外电动汽车充电通信协议研究领域最新成果的标准。
三、 标准起草过程1.2009 年3 月27 日,电动车辆分技术委员会电动汽车用动力蓄电池及其应用标准化工作组在天津召开了工作组首次会议。
根据会上讨论意见,电动车辆分技术委员会秘书处走访了相关单位,综合各单位对该标准参与起草的申请情况和企业技术基础,确定了通讯协议标准起草组。
根据第一次工作组会议精神,标准起草工作组各成员单位按照分工进行了诸多富有成效的工作。
标准起草工作组在广泛收集资料并深入研究的基础上形成了标准草案稿。
2.2009年8月17日,在天津召开标准讨论会,针对该标准草案进行了讨论,会后,对标准草稿进行了讨论和修改。
3.2009年9月,标准起草工作组在天津与日产(中国)投资有限公司与日本东京电力公司进行了技术交流,了解了目前国外标准制定情况。
4.2010年1月13—14日,在天津召开标准讨论会,会后,对标准草案进行了修订。
5.2010年3月10日,形成标准征求意见稿。
四、 标准说明1、标准内容总体概括本标准共6章,1个规范性附录。
充电机与BMS通讯报文分析说明
10 0D 00 02 FF 00 06 00为此报文的内容,“10”表示功能码16请求发送,说明此报文想要与充电机建立连接。“0D 00”用两个字节表示BMS将要发送的数据数量为0x000D=13个字节数据。“02”表示要发送此报文中的13个数据一共要发送2个包才足以容纳13个字节的数据。“FF”为保留内容。“00 06 00”表示此报文BCP对应的PGN(查看报文时可通过此数据内容找出,现在要建立连接请求的报文为协议中对应的哪个报文)。
在完成长包请求连接成功后,BMS开始发送数据包编号为1的包含数据内容的报文,
截包工具中显示:0x1CEB56F4 01 00 01 00 03 49 02 A0
分析此报文内容:
0x1CEB56F4为报文ID,“1C”为包含报文优先级(3个位)、保留位(1个位)和数据页(1个位)。“EB”为此报文的功能说明(EC为数据大于8字节的报文连接请求,EB为长度大于8字节的报文数据内容传输)。“56”此报文发送的目的地址为充电机。“F4”表示发送此报文的源地址为BMS。
后面的ff?ffffffffffff为填充的数据无效数至此表示bmssf充电机在启动充电前的流程已经完成接下来可以进行充电10可编辑可修改15在此阶段充电机根据接收到的bms需求报文来调整自己的输出电压和电定时间内没有接收到则立即停止充电或者出现无法正常充电的故障也要立即停止充在充电阶段中bms向充电机发送电池充电总状态bcs和电池充电需求报文bcd充电机在规定时间内接收到这两个报文向bmsg送充电机充电状态报文ccs同时等待是否接收到bms发送的充电中止报文bst如果接收到bst则充电机立即停止充电并向bm跋送充电机中止充电报文cst作为回应
电动汽车非车载传导式充电机与电池管理系统之间的通信协议

电动汽车非车载传导式充电机与电池管理系统之间的通信协议电动汽车非车载传导式充电机与电池管理系统之间的通信协议1. 协议目的本协议旨在规定电动汽车非车载传导式充电机与电池管理系统之间的通信方式和数据格式,确保充电过程中数据传输的安全可靠。
2. 协议范围本协议适用于所有使用非车载传导式充电机进行充电的电动汽车,包括但不限于私家车、公共交通工具、物流配送车辆等。
3. 术语定义3.1 传导式充电:指通过接触器或插头将充电设备与电动汽车连接,通过金属导体进行能量传输的充电方式。
3.2 非车载传导式充电机:指不搭载在电动汽车上,而是固定在地面或墙壁上,供用户进行充电的设备。
3.3 电池管理系统:指监测和控制锂离子等化学类型蓄电池状态的系统。
3.4 充放电控制器:指对蓄电池进行充放电控制和保护的硬件设备。
3.5 通信接口:指用于实现数据交换和命令控制的物理连接口。
4. 通信协议4.1 通信接口电动汽车非车载传导式充电机与电池管理系统之间的通信接口采用CAN总线通信方式,通信速率为250kbps。
4.2 数据格式数据格式采用标准CAN数据帧格式,包括帧ID、数据长度、数据域和校验码。
4.3 数据内容数据内容包括但不限于以下信息:- 充电设备状态:充电机的开关状态、输出电压和电流等信息。
- 电池状态:包括电池容量、SOC(State of Charge)、SOH(State of Health)等信息。
- 充放电控制器状态:包括充放电控制器的工作状态、温度和故障码等信息。
- 其他控制命令:例如启动/停止充电、调节输出功率等命令。
5. 安全性要求5.1 数据加密为确保数据传输安全可靠,本协议要求所有通信数据进行加密处理,防止数据被非法篡改或窃取。
5.2 认证机制本协议规定了认证机制,只有通过认证的设备才能进行充放电操作。
同时,认证过程中还需验证设备是否具备足够的安全性能和合法性。
5.3 故障保护为保证充电过程中的安全性,本协议要求在发生故障时,充放电控制器应立即停止充电,并向充电设备发送故障信息。
充电机与BMS通讯报文分析说明
1、周立功ZLGCANT1.1、软件功能及用途周立功ZLGCANT 软件功能:数据传输方式用CAN 通讯方式传输,可以使用该软件来采集原始数据报文,经通讯协议解析出实际数据。
用途:在电池管理系统(BMS )中,通过该软件采集外can (BMS 与整车控制器通讯)原始数据报文,或采集充电can (BMS 与充电机通讯)原始数据报文 ;通过采集的数据来查找BMS 或其它设备的故障点。
1.2、软件基本操作使用指南(USBCAN 设备需连接正常) ➢ 步骤一:双击图标,见如下图1-1所示软件界面;图1-1➢ 步骤二:打开软件后,可通过菜单栏或图标选择相应操作,见如下图1-2所示菜单栏及图标;一般情况下会用到图标“1”(打开设备)、图标“4”(缓冲帧数)、图标“6”(保存)等;图1-2打开设备缓冲帧数保存➢步骤三:通过菜单栏“设备操作”中选择“打开设备”,或点击图标“1”打开设备,通常情况下只选择相应CAN网络的波特率,其它参数均为默认值,然后点击“确认”,见如下图1-3所示;注:BMS内can波特率为500kbps,外can波特率为250kbps,充电can波特率为250kbps;其它can网络根据实际波特率选择。
选择相应波特率图1-3➢步骤四:设备参数配置完成后,通过菜单栏“编辑”中选择“缓冲帧数”,或点击图标“4”缓冲帧数,通常情况下将缓冲帧数改为最大“1000000”帧(为保证数据完整性),然后点击“确认”,见如下图1-4所示;缓冲帧数更改到最大1000000图1-4➢步骤五:点击“启动CAN”按钮,数据开始收集,见如下图1-5所示;点击“启动can”按钮图1-5➢步骤六:数据收集完成后,点击图标“6”保存按钮,文件命名(格式如“年-月-日-车牌编号”),选择保存路径,然后点击“保存”,见如下图1-6所示;点击“保存按钮”文件命名格式:年-月-日-车牌编号图1-6➢步骤七:数据保存完毕后,如无需其它操作(继续采集数据),则关闭该软件。
非车载充电机与BMS通信步骤详解

新国标GB/T 27930-2015 国标GB/T 27930-2011:非车载充电机与BMS通信步骤详解一.握手阶段〔1〕充电机发送CRM报文〔ID:1801F456〕其中第一个Byte为00〔表示此时充电机主动发送识别,请求握手〕。
〔2〕当BMS收到充电机的CRM报文后,启动数据传输协议TCPM〔由于数据长度大于8,共41〕传输电池组身份编码信息BRM:①首先BMS发送RTS报文(ID:1CEC56F4),通知充电机准备发送多少包数据。
②当充电机收到BMS发送的RTS报文后,作出应答信号,回复CTS给BMS〔ID:1CECF456〕。
③当BMS接收到充电机的应答报文CTS后,开始建立连接发送数据DT〔数据长度为41Byte,共分为6包,ID:1CEB56F4〕。
④当充电机接受到了接收完BMS发送到数据报文DT后,回复CM给BMS用于消息结束应答〔ID:1CECF456〕。
〔3〕当充电机接收到了BMS发送到电池身份编码信息BRM后,回复辨识报文CRM给BMS ( ID:1801F456 第一个 Byte 为AA )。
〔4〕假设上述3步中任何1步骤出现异常,通讯将不能往下进行,等待超时复位。
握手阶段CAN卡接收数据解释:充电机:56H,BMS:F4H,FFH〔255〕为全局地址。
标准中的SPN没有什么实际用处。
PGN的第二字节处于帧ID的第二个字节〔PF〕的位置,或多包协议的数据末3字节。
TP.CM:传输协议-连接管理,RTS:发送者,CTS:响应者,DT:数据包,EM:ndofMsgAck,消息结束应答二.参数配置阶段〔1〕 BMS发送蓄电池充电机参数BCP给充电机,启动数据传输协议TCPM〔由于数据长度大于8,共13〕。
①首先BMS发送RTS报文(ID:1CEC56F4),通知充电机准备发送多少包数据。
②当充电机收到BMS发送的RTS报文后,作出应答信号,回复CTS给BMS〔ID:1CECF456〕。
电池管理系统通讯协议

电池管理系统通讯协议随着电动汽车的普及和电池技术的迅猛发展,电池管理系统(BMS)的作用越来越突出。
BMS是电池组的重要组成部分,负责监控和管理电池的状态以确保其安全可靠运行。
为了实现BMS与其他系统之间的通信,电池管理系统通讯协议应运而生。
本文将介绍电池管理系统通讯协议的作用、常见协议及其特点。
一、电池管理系统通讯协议的作用电池管理系统通讯协议是指用于BMS与其他系统或设备之间进行数据传输与交互的规则和格式。
它定义了数据的结构和传输方式,确保不同系统之间能够正确地理解和解析数据,实现有效的通信。
通过通讯协议,BMS可以与整车控制系统、动力电池充放电系统、电池制造商的信息管理系统等进行连接,实现对电池的监控、管理和控制。
二、常见的1. CAN总线协议CAN总线协议是一种广泛应用于汽车电子系统的通讯协议。
它的特点是速度快、可靠性高、传输距离远。
CAN总线协议被广泛应用于电动汽车的BMS中,用于实现BMS与整车控制系统之间的通信。
CAN总线协议定义了数据传输的格式和通信的规则,支持多设备同时传输数据,提供了错误检测和纠正机制,确保数据的可靠性。
2. Modbus协议Modbus协议是一种串行通信协议,最初由Modicon公司于1979年开发,现已成为工业自动化领域最常见的通讯协议之一。
Modbus协议支持多种物理层传输方式,如串口、以太网等。
它定义了数据的结构和传输方式,使用简单、易于实现。
在电池管理系统中,Modbus协议常用于BMS与充电桩、能源存储系统之间的数据交互。
3. Ethernet协议Ethernet协议是一种计算机网络通信协议,用于在局域网中传输数据。
它是一种高速的通信协议,支持大量的数据传输和多设备同时通信。
Ethernet协议广泛应用于现代电动汽车中的BMS,用于实现BMS 与车载电脑、云端服务器之间的数据传输和远程监控。
三、电池管理系统通讯协议的特点1. 实时性:电池管理系统通讯协议需要保证数据传输的实时性,在电池状态发生变化时及时将数据传输给其他系统,以便及时做出相应的控制和管理。
非车载充电机的名词解释

非车载充电机的名词解释非车载充电机是一种用于给电动车、电动汽车等充电的设备,也被称为电动车充电桩。
随着电动车的普及和充电需求的增加,非车载充电机的重要性日益凸显。
在这篇文章中,我们将对非车载充电机进行深入剖析,探讨其工作原理、分类和市场前景。
一、工作原理非车载充电机是将电能源转换为电动车可以接受的电能的设备。
它通过将交流电转换为直流电,并通过充电接口与电动车连接,将电能传输给电动车的电池组。
充电机的核心部件是直流充电桩,它包括变流器、充电枪、通信模块等部件。
变流器将市电交流电转换为直流电,并根据电动车的需求调节电流和电压,确保充电过程的安全和高效。
二、分类根据充电速度和电源接入方式的不同,非车载充电机可以分为几个不同的类别。
1. 慢速充电桩(AC充电桩):慢速充电桩通常使用交流电源,充电速度较慢,适合长时间停留的地方充电,例如住宅区、停车场等。
这种充电桩成本相对较低,建设相对简单,但充电速度相对较慢,不适合急需充电的情况。
2. 快速充电桩(DC充电桩):快速充电桩一般使用直流电源,充电速度较快,通常能够在较短的时间内完成充电。
这种充电桩适合在高速公路服务区、加油站等高流量地区使用。
快速充电桩在一定程度上提高了电动车的充电效率,但建设成本相对较高。
3. 超级充电桩(超级充电站):超级充电桩是指充电速度更快、功率更高的充电设备,它能够为电动车提供更快、更便捷的充电服务。
超级充电桩往往具有很大的充电功率,能够快速为电动车充电,缩短用户等待时间。
三、市场前景随着环保意识的增强和电动车市场的蓬勃发展,非车载充电机市场前景广阔。
首先,政府在提倡环保出行方面发挥了重要作用,加大对充电设备建设的支持力度,推动了充电设备市场的快速增长。
各地的地方政府纷纷出台政策补贴和扶持措施,鼓励充电桩的建设。
这将进一步推动非车载充电机市场的发展。
其次,电动车的普及率不断提高,越来越多的人选择电动车作为代步工具。
电动车的便捷性和环保性质使其成为城市居民的首选。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
非车载充电机(充电桩)与电动汽车BMS通讯协议解析CANScope协议解析功能介绍
CANScope分析仪广州致远电子股份有限公司研发的一款综合性的CAN总线开发与测试的专业工具,集海量存储示波器、网络分析仪、误码率分析仪、协议分析仪及可靠性测试工具于一身,并把各种仪器有机的整合和关联;重新定义CAN总线的开发测试方法,可对CAN网络通信正确性、可靠性、合理性进行多角度全方位的评估;帮助用户快速定位故障节点,解决CAN 总线应用的各种问题,是CAN总线开发测试的终极工具。
CANScope支持各种车载CAN-bus应用协议的解析,特别是支持充电桩与电动汽车BMS(电池管理系统)的通讯协议解析与验证,只要用户将CANScope接入被测系统,即可实现协议数据的解析。
可用于电动汽车CAN协议解析、正确性验证等,如图 1所示。
图 1 CANScope总线分析仪解析示意图
操作步骤
1. 将仪器测试头接入被测系统CAN总线,打开CANScope软件,选择正确的波特率,启动。
如果正确连接与设置,将会有数据出现,如图 2所示;
图 2 打开CANScope软件
2. 点击菜单“高级”操作中的“报文解析列表”,进入解析界面,如图 3所示;
图 3 打开报文解析列表
3. 报文解析列表界面中,点击“加载协议”,选择“J1939_bms.dbc”文件打开,然后点击菜单栏上的“分类显示”,如图 4所示。
图 4 加载DBC文件
4. 此时接收数据即可进行协议解析,用户可以使用分类显示获取实时值或者刷新显示查看具体的帧时序关系。
如图 5所示,为握手阶段的解析。
图 5 握手阶段的解析
如图 7所示,为充电阶段的解析。
图 7 充电阶段的解析
图 8 充电结束阶段的解析
小技巧:在动态测量时,软件会将有变化的数据标红,这是由于这个数据有变化。
测试与仿真插件
为了方便客户测试充电机与BMS的通讯协议完整性,CANScope中带有协议测试与仿真插件,如图9所示。
图9 BMS与充电机协议测试仿真软件
1. 监控测试
软件可对BMS与充电桩充电过程进行监控,查找出不符合国标协议的部分,便于用户及时查找出故障根源,明确故障责任方。
图10 监控测试
2. 充电机仿真测试
这个模式下,CANScope仿真成一台充电机,对被测的BMS系统进行仿真测试,检验BMS 系统在充电的不同阶段下与异常情况下的处理是否符合国标协议的规范。
如图11所示。
图11 充电机仿真测试
3. BMS仿真测试
这个模式下,CANScope仿真成车载BMS系统,对被测的充电机系统进行仿真测试,检验充电机在充电的不同阶段下与异常情况下的处理是否符合国标协议的规范。
如图12所示。
图12 BMS仿真测试
4. 稳定性测试
本测试作为CAN物理链路层的测试工具,主要检验被测充电机或者BMS系统的CAN物理链路层的稳定性。
如图13所示。
图13 稳定性测试。