Panasonic机器人教学编程设定篇PPT课件
松下机器人操作手册
或者
登录
②窗口显示事例(焊接开始点) ※19
※18
空走
※19
③窗口显示事例(焊接中间点) ※20
焊接
※20
④窗口显示事例(焊接结束点) ※21
P10
焊接
※21
空走
7.退出当前示教模式
1)按下 窗口切换 键 2)打开[文件]菜单 3)选择 文件保存 选项
※22 ※23 ※24
※22
窗口切换
※23
+
文件
安全开关按下过轻 [力度适中]
伺服电源打开 <可以打开>
安全开关按下力量过大 伺服电源关闭
[力度过大]
<不能打开>
※1 ※2
※3
伺服打开
2 打开 机器人运转 图标 3.选择坐标系
※2 ※3
按下 右转换键 后,可以使用 键切换坐标
关闭
打开
关节
切换
直角
切换
工具
切换
圆柱
用户
(需要使用扩张机能设定)
+
右转换键
①
①②两种操作均可
②
+
持续按下
+ +
前进键
※6向后跟踪
①
+
未到达示教点 到达示教点
持续按下
・向前跟踪到1以外的其它示教点
②
- +
后退键
.
未到达 到达
P13
B.从所选择的程序跟踪修正
1.将模式选择开关打到 示教 一侧 ※1
※1
2.打开 文件 菜单
※2
3.在 文件 菜单上选择 [打开] 选项 ※3 4.选择「程序」或「最近打开过的文件」
1)打开 MORE 菜单
※1
2)选择 扩张设定
松下机器人操作手册
安全开关按下过轻 [力度适中]
伺服电源打开 <可以打开>
安全开关按下力量过大 伺服电源关闭
[力度过大]
<不能打开>
※1 ※2
※3
伺服打开
2 打开 机器人运转 图标 3.选择坐标系
※2 ※3
按下 右转换键 后,可以使用 键切换坐标
关闭
打开
关节
切换
直角
切换
工具
切换
圆柱
用户
(需要使用扩张机能设定)
+
右转换键
<在示教模式下使用用户功能键>
※24
+ 保存
使用这些键 进行换页
F1 F2 F3 F4 F5
开始跟踪 检气・送丝 示教内容切换 追加次序指令 切替 *速度变换 焊接/空走 插补方式变换 坐标系变换 切替
上面的设定仅仅是假设,用户可以根据需要随意改变设定内容。
* 在示教以外的其他操作方式时,功能键的使用会随着操作方式的不同而不同。 如果要了解进一步的详细信息,请参考用户功能键使用说明。
向前微动
微动键
TP正面
液晶显示屏
向后微动
+加
-减
确认/登录键 窗口切换键
(背面) 右转换键
取消键
安全开关
TP背面
右转换键
左转换键
模式选择开关
用户功能键
中文名称 非常停止开关
启动开关 暂停开关 伺服启动开关 Jog 微动键 登录键(确认键) 窗口切换键 取消键 用户功能键 模式选择开关 运动功能键 右转换键 左转换键 3 点安全开关
ファンクションキーⅠ
4.运转 推荐坐标(直角坐标/运动)(工具坐标/角度)
1)各轴运动时坐标系的选择
直角
焊枪的运动
松下机器人操作说明

产业机器人操作说明书基本操作型号No.YA-1 NA 系列VR Ⅱ系列GⅡ控制器内容1. 结构2. 如何使用示教盒3. 工作时得到的协助 (帮助)4. 示教模式操作 (示教)5. AUTO 模式6. 查看7. 有用的文件编辑功能 8. 错误和警报 9. 图标 10. 次序指令目录使用本产品之前,请仔细阅读本手册并保存本手册以备以后使用。
OM0105045E00(0105045)0108Panasonic机器人VRⅡ系列的"操作手册"系统 名字 描述和备注 用法安全手册 Panasonic机器人是在使用者遵守本手册内容的前提上被设计和制造的。
使用者在使用本列表中其他手册前一定要首先阅读并了解本手册的内容。
本手册解释了与工业机器人相关的基本法律和规则以及在逐步进行安装,维护和修理时的安全规程。
本文件用于机器人安装时的培训程序以及对所有机器人操作人员定期的安全操作培训。
机器人系统操作手册文件解释了标准机器人系统的配置和安装,例如通常的CO2焊接机器人系统。
本文件用于了解机器人系统的配置和安装中通常的系统连接。
机器人本体操作手册本文件解释了机器人本体的运输,安装,连接,初始设定,维护和修理。
文件的内容被限制在设备的硬件。
本文件供从事安装及维护的人员使用。
机器人控制器操作手册本文件解释了机器人控制器的运输,安装,连接,初始设定,维护和修理。
本文件的内容仅限于设备的硬件。
注意)机器人安装时软件的初始设定见"操作手册,高级操作"。
本文件供从事安装及维护的人员使用。
可选设备操作手册本文件解释GⅡ系列可选设备的安装,连接和修理。
本文件的内容仅限于设备的硬件。
注意)机器人安装时软件的初始设定见"操作手册高级操作"。
本文件用于可选设备。
本文件供从事安装及维护的人员使用。
操作手册基本操作本文件针对首次操作 Panasonic GⅡ机器人的操作人员。
本文件解释了基本的机器人功能和基本的机器人焊接操作。
松下机器人示教编程详解入门篇
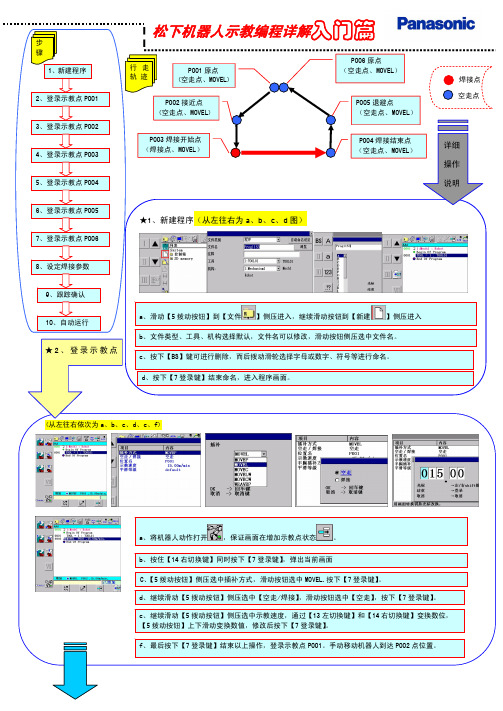
a、滑动【5拨动按钮】到【文件】侧压进入,继续滑动按钮到【新建】侧压进入
b、文件类型、工具、机构选择默认,文件名可以修改,滑动按钮侧压选中文件名。
c、按下【BS】键可进行删除,而后拨动滑轮选择字母或数字、符号等进行命名。
a、将机器人动作打开,保证画面在增加示教点状态。
a、按住【14右切换键】同时按下【7登录键】,弹出当前画面
b、用上述方法对【插补方式】和【空走/焊接】进行选择,并最终按下【7登录键】登录示教点P002。
手动移动机器人到达P003点位置。
★4、登录P003
a、按住【14右切换键】同时按下【7登录键】,弹出当前画面
b、重复以上操作,但这一点应选择【焊接点】,按下【7登录键】登录示教点P003。
手动移动机器到达P004点位置。
★5、登录示教a、关闭机器人动作
将光标移动到P001点,按下复制键
,
点,按下粘贴键
★8、设定焊接参数:d、将光标移动到【ARC-SET】一列侧压滑轮选中。
e、对参数进行设定,侧击滑轮修改数值。
★9、跟踪确认;将光标移到【Begin】一列,把机器人动作打开,选
中跟踪键,加伺服按住【MOVE+】,侧压推动滑轮进行跟踪,跟踪为逐
F3(从左往右依次为a、b 图)
(从左往右依次为a、b 图)
a、b、c、d、e 图)
(从左往右依次为9、10图)
点P002。
松下机器人通常设定

10、自动备份设定
在“设定”菜单上,点 击“备份”显示备份对 话框。
11、其它设定
屏保、工具补偿等等
焊接电源的设定
独立焊接电源
一体化焊接电源
焊接电源的设定
焊接电源的设定
焊接电源的设定
焊接开始
焊接结束
DeviceNet分割
DeviceNet分割
I/O状态
谢谢聆听
设定基本参数
3、设定软限界
在“设定”菜单上,点击“机器 人”然后点击“软限界”将显示 如右对话框。
4、微动设定
在“设定”菜单上,点击“机 器人”然后点击“微动”将显 示如右对话框。
设定基本参数
5、日期设定
在“设定”菜单上,点击“管理 工具”然后点击“日期/ 时间” 将显示对话框。
6、语言设定
在“设定”菜单上,点击“TP” 然后点击“其他语言”将会 显示设定对话框。
松下机器人教育训练
松下机器人
作成/讲解:杨桂潮 2009.10.20
课程内容 1.松下机器人控制器构成 2.设定基本参数 3.焊接电源的设定 4.DeviceNet分割
理论:50分钟 实操:50分钟
控制器构成
正向
控制器构成
冷却风扇
开关
焊接控 制卡 伺服CPU卡
主CPU卡 制动器
控制器构成
示教电缆
设定基本参数
7、编程(示教)文件夹的设定
在“设定”菜单上,点击“TP”然 后点击“文件夹设定”将显示设 定对话框。
8、设定速度限制
在“设定”菜单上,点击“控 制器”然后点击“速度限制” 将显示设定对话框。
设定基本参数
9、平滑等级设定
在“设定”菜单上, 点击“控制 器”,“运动参数”,“平滑等级” 将显示设定对话框。
松下机器人操作手册
控制器
・在设定窗口 |
输入用户ID
「robot」(英文小写字母)
(允许使用浏览功能)
・在设定窗口 |
输入登录密
码「0000」(数字)。
◎标准设定 (系统管理员级)
用户ID
robot
用户登录密码
0000
当输入错误需要修正时,可以使用BS清除+
・B2以后的版本 【允许使用自动登录功能】 设定 → 管理工具 → 用户管理→
※2
* 运动速度取决于Jog键旋转的格数
②
直角
或
或
++ -
※3
* 右图中的「高」「中」「低」速度同
设定速度相对应。
速度的限制在More中选择示教设定
※1
※2
【示教详细设定】 在 P12 进行说明
3)微动运动操作
机器人运动一段指定距离后自动停止
标准速度 高 30m(限制在 15m) 中 10m 低 3m
+加 -减
英文名称 Emergency STOP Switch (EMG. STOP) (E. STOP) START Switch
HOLD Switch
Servo ON Switch
Jog Dial Enter Key
Window Change Key
Cancel Key
User Function Key
ファンクションキーⅠ
4.运转 推荐坐标(直角坐标/运动)(工具坐标/角度)
1)各轴运动时坐标系的选择
直角
焊枪的运动
外部轴
工具标准运动
工具中心
直角
移动时
切换
切换
左转换键
左转换键
坐标切换
第5章松下PLC编程及应用PPT40页
26、机遇对于有准备的头脑有特别的 亲和力 。 27、自信是人格的核心。
28、目标的坚定是性格中最必要的力 量泉源 之一, 也是成 功的利 器之一 。没有 它,天 才也会 在矛盾 无定的 迷径中 ,徒劳 无功。- -查士 德斐尔 爵士。 29、困难就是机遇。--温斯顿.丘吉 尔。 30、我奋斗,所以我快乐。--格林斯 潘。
40、学而不思则罔,思而不学则殆。——孔子
谢谢!
36、自己的鞋子,自己知道紧在哪里。——西班牙
37、我们唯一不会改正的缺点是软弱。——拉罗什福科
xiexie! 38、我这个人走得很慢,但是我从不后退。——亚伯拉罕·林肯
ห้องสมุดไป่ตู้
39、勿问成功的秘诀为何,且尽全力做你应该做的事吧。——美华纳
松下焊接机器人电子教案PPT课件
CHENLI
13
第二章 机器人示教器(4)
(辅图)机器人的分级管理功能
CHENLI
14
第二章 机器人示教器(3)
向上/向下微动来移动光标
点击拨动按钮 显示子菜单项目
EXI T
点击拨动
EXI T
按钮关闭子
菜单项目
点击图 标显示图 标的子菜 单项目
教材(图2-17)选择菜单
大约 0.2 s 大约 0.5 s
教材(图10-12)二进制方式时序图
CHENLI
40
第十章 输入/输出设定(7)
运转输出 启动输入
启动操作
程序预约 XXX 程序预约 YYY 输入选通
Prog0ZZZ.prg 被 选 择 0.2 s 以 上
P ro g 0 Y Y Y.p rg 被 选 择
预约输出 XXX 预约输出 YYY
CHENLI
57
几第种插十补七方章式: 机器人编程的几种插补方式
示教点的插补 PTP(MOVEP)
点到点的运动
1、直线插补 Linear(MOVEL) 机器人从该点到下一点运行一段线 段。
E 1
S
2
教材(图3-22)六种摆动形式组图
CHENLI
22
第三章 手动模式(7)
程序开始 焊接开始点 焊接结束点 程序结束
教材(图3-35)设定焊接条件
CHENLI
23
第三章 手动模式(8)
关节 直角 工具 圆柱 用户
教材(图3-9)机器人运动坐标系选择菜单组图
关节坐标系的切换
CHENLI
24
(确认、窗口切换与删除键) User function
松下机器人操作手册
⑩ 示教练习 ・直线示教练习 ・直线修正练习 ・圆弧示教练习 ・圆弧修正练习 ・摆动运动示教练习 ・摆动修正练习 ・综合练习
P1
2 3 4
5 6-7 7 7
8 9 10 11 11 12 12
13 14 15 16-17 18 18
持续按下
+―键
键
OK +
或者
登录
C.从程序检查・修正操作下退出
1.窗口切换
※1
2.选择 文件 菜单 ※2
19
20-21 22 23 23
24
25 26 27 28 29 30 30 31 31
32 32 32 33
34 35 36 37 38 39 40
① 示教器说明(中文/英文 Windows CE 系统)
1.各种功能键说明
左转换键、安全开关 (背面)
功能键
暂停开关
紧急停止开关
启动开关
伺服启动开关
液晶显示器
P3
3.ID 设定
・ID 设定(B2以后的版本具有自动登录功能)
新程序的示教 程序修正 程序编辑 系统设定
这些操作都需要 ID 登录(用户级别如 右图所示)
・<ID 登录界面>
用户级别 ・操作员级
运转操作 ・程序员级
运转操作+程序示教 ・系统管理员级
运转+示教+系统设定
※如何显示用户ID登录界面
ファンクションキーⅠ
4.运转 推荐坐标(直角坐标/运动)(工具坐标/角度)
1)各轴运动时坐标系的选择
直角
焊枪的运动
外部轴
工具标准运动
工具中心
Panasonic机器人教学编程设定篇
Panasonic机器人教学编程设定篇以下是为您起草的一份Panasonic 机器人教学编程设定相关的合同:合同主体:1、甲方(提供教学编程服务方):姓名:____________________________地址:____________________________联系方式:____________________________2、乙方(接受教学编程服务方):姓名:____________________________地址:____________________________联系方式:____________________________合同标的:1、甲方将为乙方提供 Panasonic 机器人教学编程设定的相关服务,包括但不限于理论知识讲解、实际操作指导、案例分析等。
2、教学编程设定的目标是使乙方能够熟练掌握 Panasonic 机器人的编程技巧和应用,能够独立进行相关项目的开发和操作。
权利义务:11 甲方的权利义务111 甲方有权按照合同约定收取服务费用。
112 甲方有义务按照行业标准和专业要求,为乙方提供高质量、全面的教学编程设定服务。
113 甲方应根据乙方的学习进度和需求,合理调整教学内容和方法。
114 甲方应保守乙方在教学过程中涉及的商业秘密和个人隐私。
12 乙方的权利义务121 乙方有权要求甲方按照合同约定提供教学服务。
122 乙方有义务按照甲方的教学安排和要求,按时参加学习,积极配合教学工作。
123 乙方应按时支付合同约定的费用。
124 乙方不得将甲方提供的教学资料和技术内容擅自转让或泄露给第三方。
违约责任:1、若甲方未按照合同约定提供教学服务,导致乙方无法达到预期的学习效果,甲方应承担相应的责任,退还部分或全部服务费用,并根据实际情况给予乙方一定的补偿。
2、若乙方未按时支付服务费用,每逾期一天,应按照未支付金额的一定比例向甲方支付违约金。
若逾期超过一定期限,甲方有权解除合同,并要求乙方支付已提供服务的费用及违约金。
松下机器人基本操作PPT课件

Panasonic(中国)焊接学校
Panasonic(中国)焊接学校
Panasonic(中国)焊接学校
Panasonic(中国)焊接学校
Panasonic(中国)焊接学校
焊接导航功能
Panasonic(中国)焊接学校
29
承蒙垂听 深表感谢
TW轴:手腕(转动)
FA轴:肩(转动)
UA轴:躯体(前后) RT轴:腰(扭转)
机器人:6个自由度
人:7个自由度
TA机器人本体各轴与人的比较
TM1400机器人本体主要规格参数
标准型
Panasonic(中国)焊接学校
1、结构:6轴独立多关节型 2、手腕负载:6kg 3、重复定位精度:±0.08mm 4、最远到达距离:1437mm 5、总功率:3400w 6、安装姿态:普通、天吊 7、质量:约170kg
在实际工作中,通常需要将示教程序试运行,并进 行修改、调整,才能得到有效的工作程序。
Panasonic(中国)焊接学校
Panasonic(中国)焊接学校
1-启动按钮;2-暂停按钮;3-伺服ON按钮;4-紧急停止按钮; 5-+/-键;6-拨动按钮;7-登录键;8-窗口切换键;9-取消键; 10-用户功能键;11-模式切换开关;12-动作功能键
FG焊接机器人部品图
机器人焊接电源
RW轴:手臂(扭转) FA轴:肩(转动)
Panasonic(中国)焊接学校
BW轴:手腕(扭转) TW轴:手腕(转动)
RT轴:腰(扭转)
UA轴:躯体(前后)
机器人:6个自由度
TM 机器人本体各轴介绍
Panasonic(中国)焊接学校
松下机器人操作说明
产业机器人操作说明书基本操作型号No.YA-1 NA 系列VR Ⅱ系列GⅡ控制器内容1. 结构2. 如何使用示教盒3. 工作时得到的协助 (帮助)4. 示教模式操作 (示教)5. AUTO 模式6. 查看7. 有用的文件编辑功能 8. 错误和警报 9. 图标 10. 次序指令目录使用本产品之前,请仔细阅读本手册并保存本手册以备以后使用。
OM0105045E00(0105045)0108Panasonic机器人VRⅡ系列的"操作手册"系统 名字 描述和备注 用法安全手册 Panasonic机器人是在使用者遵守本手册内容的前提上被设计和制造的。
使用者在使用本列表中其他手册前一定要首先阅读并了解本手册的内容。
本手册解释了与工业机器人相关的基本法律和规则以及在逐步进行安装,维护和修理时的安全规程。
本文件用于机器人安装时的培训程序以及对所有机器人操作人员定期的安全操作培训。
机器人系统操作手册文件解释了标准机器人系统的配置和安装,例如通常的CO2焊接机器人系统。
本文件用于了解机器人系统的配置和安装中通常的系统连接。
机器人本体操作手册本文件解释了机器人本体的运输,安装,连接,初始设定,维护和修理。
文件的内容被限制在设备的硬件。
本文件供从事安装及维护的人员使用。
机器人控制器操作手册本文件解释了机器人控制器的运输,安装,连接,初始设定,维护和修理。
本文件的内容仅限于设备的硬件。
注意)机器人安装时软件的初始设定见"操作手册,高级操作"。
本文件供从事安装及维护的人员使用。
可选设备操作手册本文件解释GⅡ系列可选设备的安装,连接和修理。
本文件的内容仅限于设备的硬件。
注意)机器人安装时软件的初始设定见"操作手册高级操作"。
本文件用于可选设备。
本文件供从事安装及维护的人员使用。
操作手册基本操作本文件针对首次操作 Panasonic GⅡ机器人的操作人员。
本文件解释了基本的机器人功能和基本的机器人焊接操作。
松下机器人编程操作
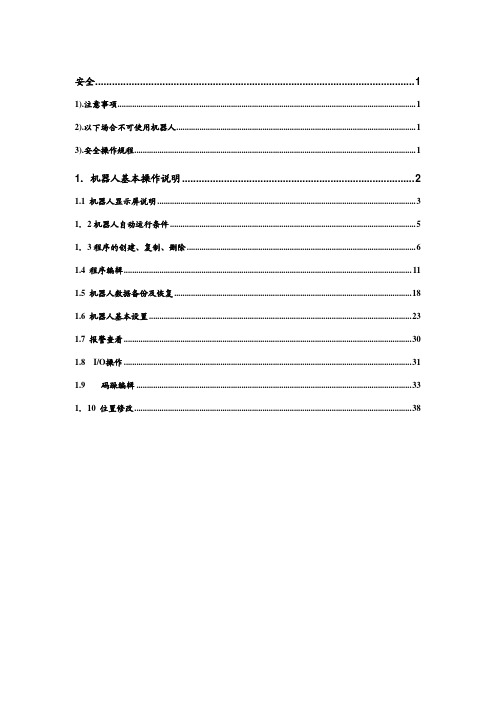
安全 (1)1).注意事项 (1)2).以下场合不可使用机器人 (1)3).安全操作规程 (1)1.机器人基本操作说明 (2)1.1 机器人显示屏说明 (3)1.2机器人自动运行条件 (5)1.3程序的创建、复制、删除 (6)1.4 程序编辑 (11)1.5 机器人数据备份及恢复 (18)1.6 机器人基本设置 (23)1.7 报警查看 (30)1.8 I/O操作 (31)1.9码跺编辑 (33)1.10 位置修改 (38)安全1).注意事项1.FANUC机器人所有者、操作者必须对自己,机器人周边人员和设备的安全负责。
FANUC 不对错误使用机器人的安全问题负责。
FANUC提醒用户在使用FANUC机器人时必须使用安全设备,必须遵守安全条款。
2. FANUC机器人程序的设计者、机器人系统的设计和调试者、安装者必须熟悉FANUC 机器人的编程方式和系统应用及安装。
3. FANUC机器人和其他设备有很大的不同,在于机器人可以以很高的速度移动很大的距离。
2).以下场合不可使用机器人1,燃烧的环境2.有爆炸可能的环境3.无线电干扰的环境4.水中或其他液体中5.运送人或动物6.攀附7.其他!FANUC公司不为错误使用的机器人负责。
3).安全操作规程3.1).示教和手动机器人1)禁止带手套操作示教盘和操作盘。
2)在点动操作机器人时要采用较低的倍率速度以增加对机器人的控制机会。
3)在按下示教盘上的点动键之前要考虑到机器人的运动趋势。
4)要预先考虑好避让机器人的运动轨迹,并确认该线路不受干涉。
5)机器人周围区域必须清洁、无油,水及杂质等。
3.2).生产运行1)在开机运行前,须清楚了解机器人根据所编程序将要执行的全部任务。
2)必须清楚了解所有会左右机器人移动的开关、传感器和控制信号的位置和状态。
3)必须清楚了解机器人控制器和外围控制设备上的紧急停止按钮的位置,准备在紧急情况下使用这些按钮。
4)永远不要认为机器人没有移动其程序就已经完成。