CAE软件操作小百科(36)
CAXA CAE入门操作介绍
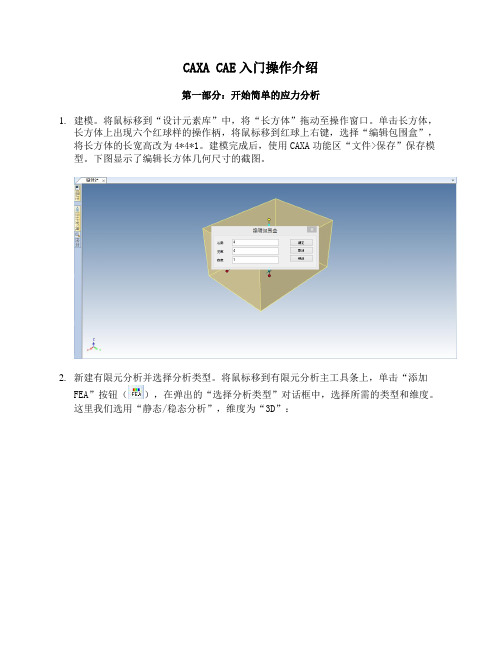
CAXA CAE入门操作介绍第一部分:开始简单的应力分析1.建模。
将鼠标移到“设计元素库”中,将“长方体”拖动至操作窗口。
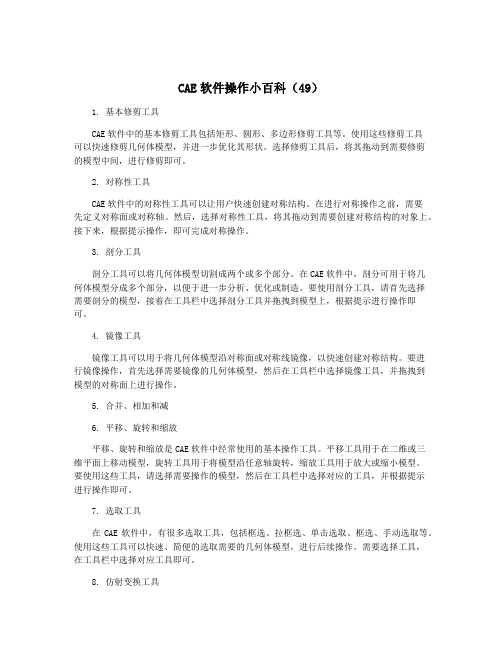
单击长方体,长方体上出现六个红球样的操作柄,将鼠标移到红球上右键,选择“编辑包围盒”,将长方体的长宽高改为4*4*1。
建模完成后,使用CAXA功能区“文件>保存”保存模型。
下图显示了编辑长方体几何尺寸的截图。
2.新建有限元分析并选择分析类型。
将鼠标移到有限元分析主工具条上,单击“添加FEA”按钮(),在弹出的“选择分析类型”对话框中,选择所需的类型和维度。
这里我们选用“静态/稳态分析”,维度为“3D”:3.在屏幕右端弹出“Multiphysics FEA”选项卡。
选项卡的上半部分是有限元分析树,树图中有模型等分析叶。
一般来说,所有分析均可通过由树的顶部至底部依次填写各叶而完成设置。
有的分析叶前有双问号(如“模型”前的“??”),表示这个叶还未进行设置。
首先有限元分析树下显示的是顶级叶的页面,Analysis(分析)页面。
我们确保勾选物理性下面的“应力”,这样表示我们将进行应力分析。
4.单击“??模型”下面的“??默认材料”。
默认材料是材料库中的第一个材料,修改材料可通过“类别”和“名称”下拉菜单。
这里我们使用默认材料即可。
可单击“编辑材料”来查看或编辑材料的线性性质。
确保勾选材料物理性下的“应力”:5.单击“??约束”后,在约束页面单击“位置和旋转”后弹出固定位置页面,选择模型的一个侧面,页面默认将所选实体(实体列表中的实体)的全部方向固定为0,符合我们的要求,因此不做更改,单击绿色对号。
6.单击“??载荷-源”后单击“力”,在弹出的外力页面中,不改变外力默认大小(100),选择刚刚固定侧面的对面(选择看不见的面可用Ctrl+Alt+Shift),单击“设定方向”使外力方向为拉长长方体。
7.由于分析例子比较简单,我们可以直接单击“自动求解”按钮,自动划分网格并计算出结果。
CAE软件操作小百科(49)
CAE软件操作小百科(49)CAE (Computer-Aided Engineering)软件是指利用计算机进行工程分析和设计的软件系统。
CAE软件设计主要包括CAD、CAE、CAM三部分,其中,CAD为计算机辅助设计;CAE为计算机辅助工程分析;CAM为计算机辅助制造。
在这个系列中,我们将通过一系列的文章帮助大家学习和了解CAE软件的基础知识和操作技能。
本篇文章将为大家介绍CAE软件操作小百科。
一、CAE软件的基本操作1. CAE软件的启动:双击桌面上的CAE软件图标或者通过开始菜单打开CAE软件。
2. CAE软件的模型导入:选择导入模型文件,将文件导入到软件中。
3. CAE软件的模型准备:对导入的模型进行准备,包括模型缩放、网格划分等等。
4. CAE软件的后处理:对模拟结果进行后处理,包括结果可视化、图形绘制等等。
1. CAE软件的键盘快捷键操作:通过键盘快捷键可以方便快捷地完成常见的操作,包括选择、旋转、缩放、平移等等。
2. CAE软件的标记和注释:标记和注释可以用于更好地理解模型和模拟结果,可以通过加标识、线条、颜色等方式进行处理,使得结果更易于读取。
3. CAE软件的过滤功能:过滤功能可以用于从大量的结果数据中筛选出所需要的数据,减少数据冗余,提高结果处理速度。
4. CAE软件的剖面与截面功能:剖面与截面功能可以用于更全面地展示模拟结果,以便更好地分析结果和进行优化。
1. 细心审查模型和模拟条件:在模拟之前,一定要细心审查模型和模拟条件,确保模型和条件符合要求,避免因为错误的模型和条件导致结果不准确。
2. 调整参数时要谨慎:在调整参数时要谨慎,特别要注意参数的范围和变化的速度,避免因参数范围不正确或变化过快导致结果的不准确或收敛不到。
3. 提高计算机的性能:CAE软件需要消耗较大的计算资源,为了保证计算的效率和精度,需要提高计算机的性能,例如增加计算机内存、更换显卡等等。
四、总结CAE软件操作小百科主要介绍了CAE软件的基础操作、常见操作技巧和注意事项,希望对大家在使用CAE软件过程中有所帮助,提高CAE软件的操作效率和精度。
CAE软件操作小百科(3)
CAE软件操作小百科(3)如果要在MSC Patran中建立局部坐标系,需在工具栏上Geometry选项中依次设置Action和Object的属性为Create 和Coord,在Method选框中选取合适的方法(3Point/Axis/Euler/Normal/2Vector/View Vector),Coord ID List 会自动生成所创建的坐标系编号,在Type选项中根据需要创建的局部坐标系类型进行选择,然后在Refer.Coordinate Frame中输入参考坐标系的编号,再完成剩余选项的填写(如果在Method中选择3Point方法,则还需完成Origin, Point on Axis 3, Point on Plane 1-3的选择),完成局部坐标系的创建.2 在MSC Patran中如何根据局部坐标系读取?┙峁??点击工具栏上Results选项,设置Action属性为Create,根据需读取的结果类型将Object的属性设置为Deformation/Fringe/Marker/Cursor/Contour/Graph/Reprot,然后点击Plot Options按钮,在Coordinate Transformation中选定CID,弹出Select Coordinate Frame,在对应的空白处输入局部坐标系的编号(如Coord 1)或直接点击对应的局部坐标系,根据需要对其余选项进行设置,Apply一下即可完成在局部坐标系中读取计算结果的操作.3 在MSC Patran中如何隐藏几何体或单元?在菜单Display中选择Plot/Erase选项,或者在工具栏中选择图标.以隐藏MPC单元为例,在工具栏中点击FEM entity 按钮,点击按钮,然后选择需隐藏的MPC单元即可.隐藏几何体及其余类型单元操作与其类似.4 如何将随时间变化的动态载荷函数表达式输入到MSC Patran中?在计算中经常会遇到随时间变化的动态载荷,这些载荷需用精确的公式进行表达.可在工具栏上Fields选项中依次设置Action,Object和Method的属性为Create,Non Spatial 和Tabular Input,在Field Name框中输入载荷名,选中Time(t)作为Active Independent Variables,单击Input Data按钮,在弹出的Non Spatial Scalar Table Data窗口中选中Map Function to Table,将载荷随时间变化的关系式输入PCL Expression f(t′)中,依次设置Start Time, End Time和Number of Points即可.5 如何在CATIA中获取模型某个截面的转动?┕吡浚开?在工具栏的测量菜单中,点击测量惯性按钮,在定义中选择测量三维的惯性,在定制中勾选所需的经测量得到的数据,然后在模型上选择需测量的截面,在轴惯性中勾选轴选项即可选定轴,在重心惯性中即可查看该截面关于不同轴的转动惯量.在操作中,一般将面密度设为1 000 kg/m2.6 在ANSYS中杆单元与梁单元的选择问题杆单元只承受沿杆件方向的拉力或压力,即杆单元不能承受弯矩,这是杆单元的基本特点;而梁单元既可承受拉力和压力,又可承受弯矩.如果计算的结构中要承受弯矩,则不能选杆单元.常用的梁单元有beam3, beam4和beam188等3种,其区别在于:(1)beam3是2D的梁单元,只能解决二维问题;(2)beam4是3D的梁单元,可解决三维的空间梁问题;(3)beam188是3D梁单元,可根据需要自定义梁的截面形状.7 薄壁结构选实体单元还是壳单元?对于薄壁结构,最好选用shell单元,因为shell单元相对于实体单元可大大减少计算量.另外,在薄壁结构承受弯矩时,如果选用实体单元,且在厚度方向的单元层数太少,计算结果误差有时会比较大,不如shell单元计算准确.8 在MSC Patran中如何将Tri3单元转换为Tri6?┑ピ??在MSC Patran的Modeling工具栏中选择Element,将Action,Object和Method依次设定为Modify,Element和Edit,在Element Attributes中勾选Type选项,在Shape中选择Tri,New Shape选择Tri6,最后选取要改变的Tri3单元即可.9 在MSC Patran中如何移动一组Points的位置而不改变这组Points的ID编号?在MSC Patran的Modeling工具栏中选择Geometry,将Action,Object和Method依次设为Transform,Point和Translate,这样不仅不会改变节点的编号,而且会保留其相应的属性以及边界条件.10 HyperMesh 生成的单元导入MSC Patran或ANSYS 中只有节点而没有网格的原因?这是因为在HyperMesh中没有定义单元类型,在ANSYS 中可通过如下操作解决:(1)用HyperMesh的export功能导出ANSYS所需的.inp文件;(2)编辑此文件,在定义单元的关键字前一行加上ET, A, XXXX.其中,A为被提示没有定义的单元代号;XXXX代表ANSYS中的单元类型.11 ANSYS画等应力线(1)plotcrtls→device options→vector mode wireframe: on,在每条等应力线旁边产生一些字母,可在第2步进行修改;(2)Plotcrtls→Style→Contour→Contour Labeling→Key Vector Mode Countour Labels: on every Nth ele,填入一个数字后观察其效果,直到在每条等应力线旁边的字母数差不多为止;(3)Plotcrtls→Style→Contours→Uniform Contours: NCONT Number of contours,填入等应力线的数量.12 在HyperMesh划分四面体网格,如何将已画好的1阶四面体单元转化为2阶?2阶的四面体单元相对于1阶四面体单元计算结果更精确,可通过在3D中选择orderchange选项,在change to 2nd 选项处打勾,点击change order即可.选择change to 1st可实现上述的逆转换.13 惯性载荷(Inertial loading)和加速度载荷有何区别?Inertial Loading: 定义惯性载荷.惯性载荷不依赖于任何单元,其通过指定参考坐标系中的移动加速度、旋转加速度和旋转速度进行定义;Acceleration: 定义加速度,需要指定具体节点.14 在MSC Patran中如何转换单位?MSC Patran没有定义具体的单位制,用户使用自己默认的、自统一的单位制即可.如果确实需要进行转换,通过MSC Patran中的Group→Transform→Scale,可实现模型在各坐标系统之间的转换.需要注意的是,此转换只会将坐标尺寸进行转换,而外力与边界条件、单元特性与材料常数等资料并未自动转换,其中外力与边界条件可通过放大因子(Scale factor)进行快速修正.(待续)。
CAE软件操作小百科(35)
第26卷第1期 2017年2月计算机辅助工程Computer Aided EngineeringVol. 26 No. 1Feb. 2017应用技术与技巧Application Technique and Skills DOI:10.13340/j. cae.2017. 01.013 CAE软件操作小百科(35)席强(_同济大学座用.力.学所,上海200092)1 LAMMPS 的 Lattice 命令LA.M MPS本身在建瘼方面是比较薄弱的,因此 L attb命令在LAMMPS建模中具宥举足轻重的地 位,Lattbf.可以建立大多数晶格模型》在金属、晶体、材料等相关领域的研究中使用比较频繁.Lattice命令可以定义一个其他指令可以使用的 晶格.在LAMMPS中,一个晶格是空间中简单的点 集,由基本原子构成的可在三維空间中无限复制的 晶胞(反映晶体对称性的最小重复单元,也称单胞)所组成.Lattice命令定义的晶格应用在2处:第-j 在模拟盒乎内部的格点上创建原子(可以为棊本原 ^分配不同的_屬管类療).c:r eat&_atoms {Jommaiid..;第 二,三维晶格中的晶格间距可以被其他命令,如 create J〕ox..,.rt?giQn,velocity等,作为距离孽元便用.Lattice命令的.决定参数.一个晶袼由:晶胞v晶胞 内部的基原子和变换参数(密度、、平移规则、取 向:)决食..矢藝K,a.3是晶胞.的棱矢遽,在:围态物 理學虽面用术语《基矢”来表示,应用时獻基于此查 找相关文献.在LAMMPS中不一定要用最小体积的 原胞(最小的周期性重复单55)决定晶格参数,比如 • peri/pmb等介观势函数'力场下__暴粒大子原|包体 积,在某些情况下又由基本原子决定.原胞类型要对应维度.晶格类型必须要与模拟 的维度匹配.简单立方se,体心立方bcc,,面心立方 f保:,六角密堆积丨i〇p和金刚_石diamond类:鐵用乎三| 维建模.!四方sq.,sq2和六方hex:类謹用爹二维建 模;自定义custom类型既可以用于二维也可以用于 维建模.Keyword的使用•origin选项指定在将单胞愈置到模拟盒子中的时候,如何对其进行上浮或者平移.参数是分数值(〇矣<1.〇),意思是说按着相应方向上的晶格间距的分数值进行平移或者上浮_orient选项指定在将孽胞布置到模拟盒子中的时候,如何对其进行旋转,其实是设置坐标轴放在哪个晶格方向為所指定的3个晶格方向必须羅相望正交并且满足右手定则的.spaci啤选项用来直接设置晶格间距,只在特殊情况下使用.2 LAMMPS中重叠原子的处理如果随机给定初始条件,不可避免会产生原子重叠.摸拟开始时必须把熏叠原子推开,否则模拟无法进行.处理重叠原子和能量最小化有区别,因为推开原子不一定能量就最小.处理办法g前主要有以下3种.(1.) pair—style 'soft conmand 力口J tspiall tiiuestep,. soft style HT使厚子坐截重叠力.不会无海大,再加上 小的时间步,这样原子一次移动的距离不会太大 (最奸<〇.1个单位),从而保证推开重叠原子-(:2)fix nve/Iimit.c卿m_i可通过限制最大移动 距离来实现原子的分离,此办法对势能和时间步长 没有特殊要求.(3)minimize coiu.wand可通过一窮的算法使系统能量巖小化,在某些时候可以用来推开重義原乎,—般用于周期性模拟盒子,而且系统中没有需要固定不动的原子,相比较而言,较为常见的是minimize command,但有些时候还是会报错,所以这座推荐第二种办法,使用方便J;命令自身对模拟系统没有特别的要求,较为通用.收稿日期:2016-11-.30作者简介:席强(1994一),男,陕西汉中人,硕士研究生,研究方向为海水座力腐蚀机理,(E-mail)xiqiang@ tongji. edu. cn cae@ shmtu. edu. cn ; smucae@ 163. com http ;//www. chinacae. cn76计算机辅助工程2017 年3 LAMMPS 中的 fix deform 命令一般地,fix deform 命令用来改变体系形状从而 模拟非平衡动力学,可以通过多种方法产生非平衡 行为.这里抛开动力学问题不谈,介绍其用于系统建 模时的技巧和特殊用处.用fix deform 来设置体系密度的命令如下fix 1 all deform 1000 x final - 50. 0 50. 0 y final - 50. 050. 0 z final -50. 0 50. 0 units box其原理在于通过改变系统的体积来改变系统的 密度.使用final style 对于精确设定系统体积很有帮 助,在建立模拟体系时,如果体系只有单独一个,可 以把边界设置好;也可以把初始的体系密度设置很 大,然后利用这个命令改变到自己所要的密度上,从 而不再从read, data 中改变边界值(如果这样的话, 对于跨边界的bond 会出错).这个技巧对于需要通 过改变密度来模拟不同体系时非常方便,不用多次 做初始化数据的工作.在使用时需要注意以下几点.(1) 用命令改变长度时,一定要加上单位,最好 不要默认,否则也可能出错.(2)最好在开始时使用此命令来设定密度,因 为改变密度后还有个趋平过程,如果中间改变的话,以前的模拟步数都要舍弃,这样会增加模拟的时间.(3) 此命令可能会使系统产生宏观速度,所以 使用后最好用velocity command 重新初始化速度.(4)此命令是用从新标度原子的方法来变化坐 标的,如果体系有刚性的物体或多个必须固定的原 子,就不要用或者把这些原子先剔除,把其他的改变 好后再放入体系.4 LAMMPS 如何生成data 文件由于LAMMPS 本身生成初始坐标文件的能力无法很好地适应不同的模拟方向,因而许多初始坐 标要自己写成data 文件.LAMMPS 对读入的data 文 件有自己的格式要求,需要具备一定编程能力才能 自主编写data 文件,下面总结几种编写data 文件的 方法.(1) 仔细阅读手册中关于data 文件的章节白data 文件的格式及用法.先模拟例子中与自己领 域相关的例子,用restart 命令继续计算.restart 文件 通过工具文件夹中的restart2date 工具转换成data文件,然后套用格式到自己的初始坐标文件中.(2) 将工具文件夹中的msi21mp. exe 拷贝到定文件夹下,在MS( Materials Studio)中建立好结构 模型后,在dS 模型或者forcite 模型中指定力场类 型,export 结构保存为cai •格式,同时自动有mdf 格 式的文件生成,将cai •和mdf 文件以及力场文件拷 贝到msi21mp. exe 所在的文件,运行msi21mp. exe, 生成文件data. xxx.(3) 在MS 中导出pdb 格式文件,套用上面方(1)中的固定格式•在实际使用中,建议常使用第三种办法,即得到坐标文件—固定格式—修改,既可以避免在转换过程中产生的错误,又对自身模型有一个更深刻的理解,不能过分依赖现有程序.在LAMMPS 的使用中,遇到问题先联想已经掌握的方法,再考虑应用此方法的“副作用”并想办法解决或避免,在此过程中一定要反复查阅手册(http://lammps. sandia. gov/doc/Manual. h tm l),最终形成自己的问题解决办法.(摘自同济大学郑百林教授《CAE 操作技能与实践》课堂讲义)(待续)http ;//www. chinacae. cn cae@ shmtu. edu. cn ; smucae@ 163. com。
CAE软件操作小百科(49)
CAE软件操作小百科(49)1. 基本修剪工具CAE软件中的基本修剪工具包括矩形、圆形、多边形修剪工具等。
使用这些修剪工具可以快速修剪几何体模型,并进一步优化其形状。
选择修剪工具后,将其拖动到需要修剪的模型中间,进行修剪即可。
2. 对称性工具CAE软件中的对称性工具可以让用户快速创建对称结构。
在进行对称操作之前,需要先定义对称面或对称轴。
然后,选择对称性工具,将其拖动到需要创建对称结构的对象上。
接下来,根据提示操作,即可完成对称操作。
3. 剖分工具剖分工具可以将几何体模型切割成两个或多个部分。
在CAE软件中,剖分可用于将几何体模型分成多个部分,以便于进一步分析、优化或制造。
要使用剖分工具,请首先选择需要剖分的模型,接着在工具栏中选择剖分工具并拖拽到模型上,根据提示进行操作即可。
4. 镜像工具镜像工具可以用于将几何体模型沿对称面或对称线镜像,以快速创建对称结构。
要进行镜像操作,首先选择需要镜像的几何体模型,然后在工具栏中选择镜像工具,并拖拽到模型的对称面上进行操作。
5. 合并、相加和减6. 平移、旋转和缩放平移、旋转和缩放是CAE软件中经常使用的基本操作工具。
平移工具用于在二维或三维平面上移动模型,旋转工具用于将模型沿任意轴旋转,缩放工具用于放大或缩小模型。
要使用这些工具,请选择需要操作的模型,然后在工具栏中选择对应的工具,并根据提示进行操作即可。
7. 选取工具在CAE软件中,有很多选取工具,包括框选、拉框选、单击选取、框选、手动选取等。
使用这些工具可以快速、简便的选取需要的几何体模型,进行后续操作。
需要选择工具,在工具栏中选择对应工具即可。
8. 仿射变换工具仿射变换工具可以对几何体模型进行多种变换,包括旋转、缩放、翻转等。
要使用仿射变换工具,请选择需要变换的模型,在工具栏中选择仿射变换工具,并根据提示进行操作。
9. 元素生成工具10. 曲线绘制工具CAE软件中曲线绘制工具可以用于绘制任意曲线,包括多边形、圆弧、贝尔曲线等,可以用于定义或优化几何体模型的形状。
CAE软件操作小百科
CAE软件操作小百科作者:顾铖璋,武秀根来源:《计算机辅助工程》2010年第03期在MSC Patran中一般通过Properties→Create→0D→Grounded Spring或Properties→Create→1D→Spring设定弹簧单元.前者定义的弹簧为一端固定,一端变形;后者定义的弹簧2端都可变形.定义弹簧时必须指定弹簧的自由度方向,自由度依赖于在定义节点时所用的坐标系.若定义不与现有坐标系平行的弹簧单元,可在Geometry中新建1个与弹簧单元平行的坐标系,然后通过element→modify→node→edit修改弹簧节点的坐标系.2 如何在ANSYS中定义非直角坐标系数组参数?若在直角坐标系中定义数组参数,可通过Parameters→Array Parameters→Define(或Edit)实现;但若在非直角坐标系下定义数组参数,则无法通过GUI操作实现.可使用命令流,如Local,12,1*DIM, zp, table, 72, 10, 1, Y, Z, NULL, 12其中:Local命令的作用是定义1个新坐标系;12为该坐标系的参考编号,可为任意大于10的整数;1表示该坐标系的类型为柱坐标系;*DIM命令的作用是定义1个数组参数;zp为数组名;table为数组类型;72,10和1分别为数组在各个维上的大小;Y,Z和NULL分别代表数组各个维的变量,NULL表示空.3 在FLUENT中几种压力的概念与相互关系在FLUENT中会接触到以下几种压力:(1)相对压力(Relative Pressure):以其中1端(或1点)的压力为参考值,其他地方的压力为与该端(或该点)的差值;(2)滞止压力或总压(Stagnation or Total Pressure):某点静压与动压之和;(3)静压(Static Pressure):因流体分子自由运动所造成的压力;(4)动压(Dynamic Pressure):因流体整体运动所造成的压力;(5)绝对压力(Absolute Pressure):以绝对真空为零点所测量到的压力;(6)表压(Gauge Pressure):以1个大气压为零点所测量到的压力;(7)操作压力(Operating Pressure):即大气压力.其相互关系为总压=静压+动压;绝对压力=操作压力+表压4 如何在FLUENT中判断结果是否收敛?判定结果收敛与否没有绝对标准,通常可用以下3种方法判断计算是否已经收敛.(1)观察残差曲线.可在残差监视器面板中设置Convergence Criterion(收敛判据),如设为10-3,当残差下降到小于10-3时,系统即认为计算已经收敛并同时终止计算.(2)流场变量不再变化.有时不论怎样计算,残差都不能下降到收敛判据以下,此时可用具有代表性的流场变量判断计算是否已经收敛(如果流场变量在经过多次迭代后不再发生变化,就可认为计算已经收敛).(3)总体质量、动量和能量达到平衡.在Flux Reports(通量报告)面板中检查质量、动量、能量和其他变量的总体平衡情况,计算域的净通量应小于0.2%.5 在FLUENT中各种求解器的区别和适用范围FLUENT 6以后的版本中有2种求解器:基于压力的求解器(pressure,based solver)和基于密度的耦合求解器(density,based coupled solver).如图1所示,前者将动量和压力(或压力修正)作为基本变量求解;后者用矢量形式求解连续性方程、动量方程、能量方程和组分方程.基于压力的求解器又分为分离式(segregated)计算和耦合式(coupled)计算.分离式计算和耦合式计算的区别在于求解连续、动量、能量和组分方程的方法有所不同.前者分别求解上面的几个方程,最后得到全部方程的解;后者则用求解方程组的方式同时进行计算,最后获得方程的解.二者的共同点是在求解附带的标量方程时(如计算湍流模型或辐射换热)都采用单独求解的方式,先求解控制方程,再求解湍流模型方程或辐射方程.图 1 FLUENT求解器简介基于压力的求解器适于求解从低速不可压缩流体到高速可压缩流体的绝大多数问题,占用内存较少;基于压力的耦合求解器在求解绝大多数的单相流时比标准的基于压力的求解器表现更好,但不能用于求解多相流且其所需的内存是分离式求解器的1.5~2倍;基于密度的求解器适用于求解密度、能量、动量和组分之间耦合关系较强的问题,如带燃烧的高速可压缩流动、高超声速流动或激波的相互作用等.6 在FLUENT中求解难以收敛的解决方法求解难以收敛往往由问题自身的合理性、网格质量较差或不恰当的求解设置等引起,不收敛的结果基本是错误的.遇到难以收敛的问题时,可尝试采用以下的解决方法:(1)确保所需求解的问题合理;(2)用1阶离散格式计算初始解;(3)对于基于压力的求解器,降低有收敛问题的项的低松弛因子(underrelaxation factors);(4)对于基于密度的求解器(density,based solver),降低Courant数;(5)重新划分网格或改善网格质量.(待续)(摘自同济大学郑百林教授《CAE操作技能与实践》课程讲义.)。
CAE软件操作小百科
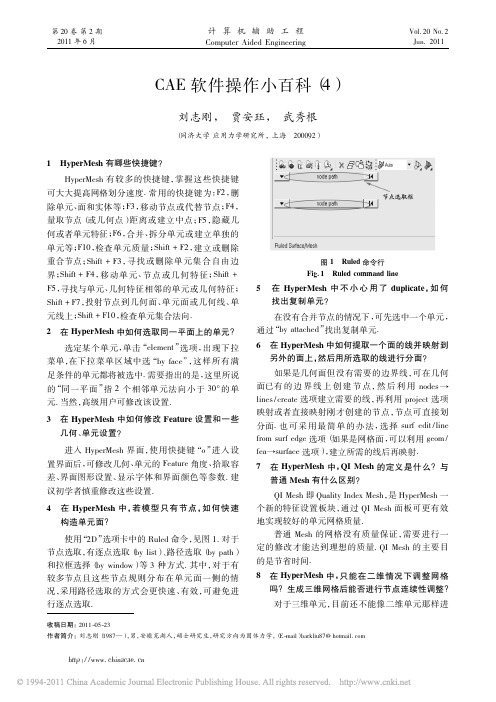
http ://www.chinacae.cn第20卷第2期2011年6月计算机辅助工程Computer Aided EngineeringVol.20No.2Jun.2011CAE 软件操作小百科(4)刘志刚,贾安珏,武秀根(同济大学应用力学研究所,上海200092)收稿日期:2011-05-23作者简介:刘志刚(1987—),男,安徽芜湖人,硕士研究生,研究方向为固体力学,(E-mail )barkliu87@hotmail.com 1HyperMesh 有哪些快捷键?HyperMesh 有较多的快捷键,掌握这些快捷键可大大提高网格划分速度.常用的快捷键为:F2,删除单元、面和实体等;F3,移动节点或代替节点;F4,量取节点(或几何点)距离或建立中点;F5,隐藏几何或者单元特征;F6,合并、拆分单元或建立单独的单元等;F10,检查单元质量;Shift +F2,建立或删除重合节点;Shift +F3,寻找或删除单元集合自由边界;Shift +F4,移动单元、节点或几何特征;Shift +F5,寻找与单元、几何特征相邻的单元或几何特征;Shift +F7,投射节点到几何面、单元面或几何线、单元线上;Shift +F10,检查单元集合法向.2在HyperMesh 中如何选取同一平面上的单元?选定某个单元,单击“element ”选项,出现下拉菜单,在下拉菜单区域中选“by face ”,这样所有满足条件的单元都将被选中.需要指出的是,这里所说的“同一平面”指2个相邻单元法向小于30ʎ的单元.当然,高级用户可修改该设置.3在HyperMesh 中如何修改Feature 设置和一些几何、单元设置?进入HyperMesh 界面,使用快捷键“o ”进入设置界面后,可修改几何、单元的Feature 角度、拾取容差、界面图形设置、显示字体和界面颜色等参数.建议初学者慎重修改这些设置.4在HyperMesh 中,若模型只有节点,如何快速构造单元面?使用“2D ”选项卡中的Ruled 命令,见图1.对于节点选取,有逐点选取(by list )、路径选取(by path )和拉框选择(by window )等3种方式.其中,对于有较多节点且这些节点规则分布在单元面一侧的情况,采用路径选取的方式会更快速、有效,可避免进行逐点选取.图1Ruled 命令行Fig.1Ruled command line5在HyperMesh 中不小心用了duplicate ,如何找出复制单元?在没有合并节点的情况下,可先选中一个单元,通过“by attached ”找出复制单元.6在HyperMesh 中如何提取一个面的线并映射到另外的面上,然后用所选取的线进行分面?如果是几何面但没有需要的边界线,可在几何面已有的边界线上创建节点,然后利用nodes →lines /create 选项建立需要的线,再利用project 选项映射或者直接映射刚才创建的节点,节点可直接划分面.也可采用最简单的办法,选择surf edit /line from surf edge 选项(如果是网格面,可以利用geom /fea →surface 选项),建立所需的线后再映射.7在HyperMesh 中,QI Mesh 的定义是什么?与普通Mesh 有什么区别?QI Mesh 即Quality Index Mesh ,是HyperMesh 一个新的特征设置板块,通过QI Mesh 面板可更有效地实现较好的单元网格质量.普通Mesh 的网格没有质量保证,需要进行一定的修改才能达到理想的质量.QI Mesh 的主要目的是节省时间.8在HyperMesh 中,只能在二维情况下调整网格吗?生成三维网格后能否进行节点连续性调整?对于三维单元,目前还不能像二维单元那样进http ://www.chinacae.cn行reMesh ,但可以通过F3键调整节点的位置以保持节点的连续性.当利用tetraMesh 选项时,在fixed trias 中选择的单元和在floatable trias 中选择的单元都是要从二维转化到三维的单元,节点位置可通过调整二维网格的节点位置进行改变.9在HyperMesh 中,2个物体接触面的上、下面的节点编号相同吗?接触面的上、下面的节点编号是不相同的.采用2D →detach 可以将单元或节点分开.用detach element 可以选择节点上面的单元;用detach from 可以选择节点下面的单元.10在HyperMesh 中有linear ,bellcurve 和exponent ,它们都是从一端到另一端逐渐加密,能否实现从中间到两端逐渐变疏或变密?在HyperMesh 中划分单元,选择bellcurve 类型并设定intensity 的值,就可获得两端密、中间疏的单元;如果将intensity 的值设置为负值,则会得到两端疏、中间密的单元.另一种方法是将需要加密的地方先进行几何切割,再进行网格划分.11在HyperMesh 中,对面上网格进行不同的comp 划分时,划分的网格并不连续,如何合并成连续的单元?在Tool →edges 下找出并合并面单元的自由边,然后找出并删除重合节点;在Tool →faces 下找出并合并体单元的自由面,然后找出并删除重合节点.12在HyperMesh 中,利用edges →find edges 发现有自由边,如何处理?T-connection 是什么含义?有2种自由边:(1)合理的自由边,如在边界上的边没有公共边界,这种情况属于合理的自由边;(2)不合理的自由边,如在单元的内部,边应该有公共边界,但如果出现无公共边界的边,则不合理,即单元不协调,说明网格有问题.应确定哪些单元存在该问题,为什么不协调,并尽量用最小的工作量解决,而不是删除所有单元.T-connection 代表3个单元相交,类似于T 形,如结构中存在T 形结构,那T-connection 正常,但是对于一般的体单元(四面体或六面体),它的整个结构由一层外壳包裹起来,内部不应该有搭界的结构,即不存在T-connection 的情况,这时的T-connection 就是有问题的.所以,在生成体单元时一定要检查free edge 和T-connection ,以确保整个模型内部节点的协调性.13在HyperMesh 中,怎样将八节点六面体单元改成二十节点六面体单元?可以用3D 面板下的order change 修改.对于其他类型的单元都可以通过1D ,2D 或3D 面板完成单元1阶、2阶类型的转换.(待续)(摘自同济大学郑百林教授《CAE 操作技能与实践》课程讲义.檿檿檿檿檿檿檿檿檿檿檿檿檿檿檿檿檿檿檿檿檿檿檿檿檿檿檿檿檿檿檿檿檿檿檿檿檿檿檿檿檿檿檿檿檿檿)上海海事大学杂志总社多人获上海市科技期刊优秀编辑奖近日,上海海事大学杂志总社吴磊明、张婕、贾裙平和于杰等4人获上海市科技期刊学会授予的“优秀责任编辑奖”(全市科技期刊共表彰61人);廖粤新、吴磊明、张敏和于杰等4人获上海市高校学报研究会授予的“上海市高校科技期刊优秀编辑奖”(全市高校共表彰31人);于杰获上海市科技期刊学会授予的“上海市科技期刊优秀青年编辑奖”(全市科技期刊共表彰12人).931第2期刘志刚,等:CAE 软件操作小百科(4)。
CAE教程——精选推荐

CAE教程CAE 分析1.打开⽂件2.点击开始→⾼级仿真打开仿真界⾯3.在仿真导航器单击右键新建FEM和仿真,单击确定,出现新建FEM和仿真对话框。
在对话框下端的求解器选择NX NASTRAN 分析类型选择结构,单击确定。
4.上⼀步单击确定后出现解算⽅案对话框,在上端解算⽅案类型中选取101-单约束(由于结构简单)。
解算⽅案类型有许多种,根据实际情况选取。
5.在上⼀步选取好解算⽅案类型后,在常规下⽅勾选单元迭代求解器,点击⼯况控制,点击输出请求后的按钮;打开新的对话框,根据需要,在下端属性中选取你想那些⼒、位移、应⼒、应变等(解算出的结果是根据选取的来求解),选取后在下端启⽤前打勾。
这⾥我选取⼒、位移、应⼒、应变、接触结果。
选取好后单击确认—确认。
6.单击⼯具栏---窗⼝—选择后缀为.fem7.出现的新界⾯为⽹格划分界⾯。
→直接点击3D 四⾯体⽹格→出现⽹格划分对话框-------选择第1个体→选择10点四⾯体→⽹格⼤⼩→建捕捉器,选取材料。
8.捕捉器建⽴和选取材料点击,出现⽹格捕集器,在属性—类型后⾯,点击创建物理项→出现,单击继承的后⾯选取材料→在材料表中选取材料→这⾥我选择9.同样的⽅法,将另外的⼀个部件定义⽹格、材料(材料选⽤Nylon)等。
10.⽹格划分完成后,在仿真导航器中出现如图3D收集器,如果以上步骤中,划分⽹格、选取材料出错的情况下,可以在此点击右键编辑;其中Solid主要是材料的选取、3D_mesh主要是⽹格⼤⼩的设置。
11.单击⼯具栏---窗⼝—选择后缀为.sem 窗⼝,点击确认12.出现的新界⾯为载荷、约束、解算界⾯。
选择约束→点击下拉菜单→选择固定约束,选择2好零件下表⾯→确定。
13.同样的⽅法→选择强迫位移约束,→→根据3D 部件可以看到,上端1好部件沿着Y 轴负⽅向向下运动,直到和部件2扣在⼀起,运⾏的距离可以测量,→单击确认。
此处也可以添加⼒来解算14. 点击仿真对象下拉箭头,选择⾯对⾯接触确认15.在新出现的⾯对⾯接触对话框中,点击⾃动配对后的下拉箭头,选择⼿⼯,→出现源区域和⽬标区域的选择→单击源区域下的按钮→出现新对话框,选择对象中选择1号部件的两个斜边→单击确认。
CAE软件操作小百科

CAE软件操作小百科作者:***来源:《计算机辅助工程》2021年第01期1 Abaqus中的复合结构及其建模方法有哪些?Abaqus提供多种途径对复合结构进行建模。
根据复合材料的种类、对应的数据信息、边界条件等因素选择合适的方法,最终可得到理想的结果。
复合结构是由复合材料制成的,其中层状复合材料比较常见,主要包括纤维增强塑料、层合板和夹芯板等。
复合材料被广泛应用于航空航天等领域。
根据组分不同可对复合材料进行分类,主要有聚合物基复合材料(polymer matrix composite, PMC)、金属基复合材料(metal matrix composite, MMC)、陶瓷基复合材料(ceramic matrix composite, CMC)、碳和石墨基复合材料(carbon and graphite matrix composite, CGMC)等。
Abaqus软件可提供多种方法对复合结构进行模拟:(1)微观上,基体和增强材料可采用单独的可变形连续体进行模拟。
(2)宏观上,基体和增强材料可采用整体的可变形连续体进行模拟。
当单个纤维的微观行为和与基体的相互作用不重要时,这种方法效果较好。
(3)混合建模时,复合结构可采用单一正交各向异性材料进行模拟。
当结构的整体行为比微观行为更重要时,可以采用这种方法,定义单个材料即可预测全局行为。
2 Abaqus模拟复合材料如何设置单元类型?Abaqus建模的单元类型设置见图1。
Abaqus共有3种单元类型可供选择:Conventional Shell单元、Continuum Shell单元和Solid单元。
Conventional Shell为壳单元;Continuum Shell和Solid都是体单元,但Solid单元不能选择Lamina(复合材料)类型,只有Continuum Shell可以定义Lamina类型。
3 Abaqus复合材料层压板静力分析步骤有哪些?复合材料层压板静力分析步骤如下。
CAE软件操作小百科(5)
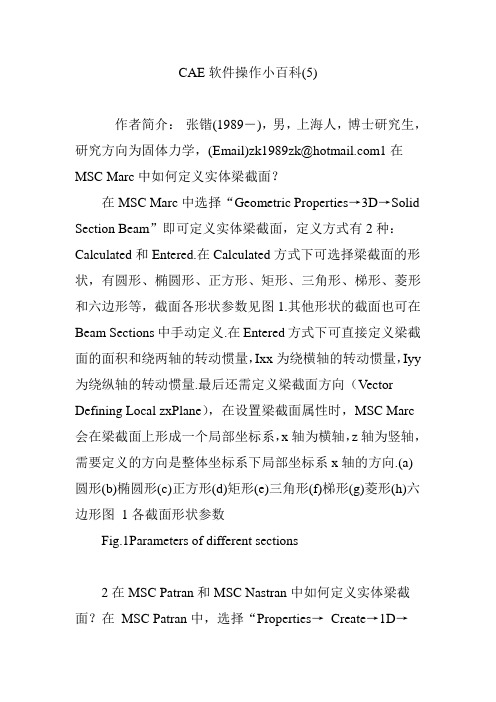
CAE软件操作小百科(5)作者简介:张锴(1989―),男,上海人,博士研究生,研究方向为固体力学,(Email)zk1989zk@1在MSC Marc中如何定义实体梁截面?在MSC Marc中选择“Geometric Properties→3D→Solid Section Beam”即可定义实体梁截面,定义方式有2种:Calculated和Entered.在Calculated方式下可选择梁截面的形状,有圆形、椭圆形、正方形、矩形、三角形、梯形、菱形和六边形等,截面各形状参数见图1.其他形状的截面也可在Beam Sections中手动定义.在Entered方式下可直接定义梁截面的面积和绕两轴的转动惯量,Ixx为绕横轴的转动惯量,Iyy 为绕纵轴的转动惯量.最后还需定义梁截面方向(Vector Defining Local zxPlane),在设置梁截面属性时,MSC Marc 会在梁截面上形成一个局部坐标系,x轴为横轴,z轴为竖轴,需要定义的方向是整体坐标系下局部坐标系x轴的方向.(a)圆形(b)椭圆形(c)正方形(d)矩形(e)三角形(f)梯形(g)菱形(h)六边形图1各截面形状参数Fig.1Parameters of different sections2在MSC Patran和MSC Nastran中如何定义实体梁截面?在MSC Patran中,选择“Properties→Create→1D→Beam→Input Properties”即可定义梁的属性,选择Create Sections可根据MSC Nastran的梁截面库定义截面,软件会自动计算相关参数;在Section Name的Value Type中选择Properties可手动定义梁截面的参数.最后需要定义Bar Orientation,与MSC Marc一样,MSC Nastran也会在梁截面上形成一个局部坐标系,1轴为横轴,2轴为竖轴;但与MSC Marc不同的是,MSC Nastran中Bar Orientation定义的方向是整体坐标系下局部坐标系2轴的方向.3在MSC Marc,MSC Patran和MSC Nastran中如何拓扑显示梁截面?若在MSC Marc中选择Calculated方式,在MSC Patran和MSC Nastran中使用截面库定义梁截面,则截面在软件中可拓扑显示.在MSC Marc中选择“Plot→Elements Settings→Beam→Plot Beams in 3D”,然后选择Regen重新生成即可;在MSC Patran中选择“Display→Load/BC/Elem Props→Beam Display→3D: FullSpan”.4在MSC Marc中如何查看变形后Rebar单元与参考轴的角度?MSC Marc的结果中不直接给出变形后Rebar单元与参考轴的角度,但可根据Rebar单元的最大主应力角度进行测量.在Results中选择“More→Vector Plot→On→Vector →Principal Rebar Stress Max”,显示Rebar单元最大主应力的向量,测量其与参考轴的角度.Rebar主要承受拉力,因此最大主应力方向与Rebar单元方向一致,测得的角度即为Rebar单元与参考轴的角度.5在MSC Marc中如何导出变形后的模型轮廓?在Results中将Deformed Shape选为Off,否则结果会出错.选择相应的步数,然后选择“Tools→Rezone Mesh”得到变形后的网格,切换到Mesh Generation→Convert→Edges to Curves,选择模型轮廓上的单元边界,最后选择Files→Export导出.6在MSC Marc中如何将前次计算的结果作为本次计算的初始条件?使用MSC Marc的PreState功能.具体方法为:Initial Conditions→General→Previous Analysis State,其中Stress和Strain为必选,其他可选;选择Axisymmetric to 3D 可将二维轴对称结果文件旋转为三维模型,在Expand Repetition中输入环向复制的次数,即环向单元个数.在Post File中选择前次计算的结果文件,其中必须包含Stress和Strain,否则会出错.7在MSC Marc中如何选取摩擦模型?在MSC Marc中选择“Jobs→Contact Control→Friction→Type”,MSC Marc提供库仑摩擦模型(Coulomb)和剪切摩擦模型(Shear).库仑摩擦模型分为反正切(Arctangent)、双线性(Bilinear)和黏滑(StickSlip)模型.反正切模型多用于相对运动速度较大的情况,双线性模型多用于相对位移较大的情况,黏滑模型多用于从黏性摩擦到滑动摩擦突变的情况.剪切摩擦模型分为反正切和双线性模型,多用于模拟金属加工成型.8在MSC Marc中如何调整颜色?在MSC Marc中选择Visualization→Colors,可在右侧手动调整单元、边界条件和背景等颜色,也可在左侧Colormap 中选择MSC Marc预设的颜色.9在MSC Marc中如何确定二维刚体的接触方向?在MSC Marc中选择“Contact→Contact Bodies→ID Contact”,观察代表刚体的曲线,光滑一侧为接触面,带短线一侧为非接触面(见图2),可使用Flip Curves命令调整方向,若方向设置错误,单元会穿透刚体.图2接触方向示意Fig.2Schematic diagram of contact direction10在MSC Marc中如何设定接触容差?选择“Contact→Contact Table→Properties→选择相应的接触对→Distance Tolerance”,软件默认设置为0,表示容差为最小单元边长的1/20或壳单元厚度的1/4,可根据具体情况调整.11如何不打开Marc Mentat直接提交计算?首先使用Marc Mentat打开需要计算的文件,选择“Files→Write”,保存dat文件至指定目录;然后打开命令提示符,切换到dat文件目录下,输入run_marc -j **.dat,其中**代表dat文件的文件名,若出现问题,可在marc\\tools目录下找到run_marc.bat文件,将第3行for %%i in (%0) do set DIRSCRIPT=%%~dpi编辑为for %%i in (run_marc.bat) do set DIRSCRIPT=%%~dp$PATH:i即可.(待续)(摘自同济大学郑百林教授《CAE操作技能与实践》课程讲义.)。
CAE软件操作小百科(49)
CAE软件操作小百科(49)CAE软件的操作方法是非常重要的,因为它涉及到CAE软件的应用能力和使用效率。
因此,以下是一些CAE软件的操作小百科,供大家参考。
1. 软件安装首先,需要正确地安装CAE软件。
在安装过程中,请注意以下流程:(1)先下载和安装必要的软件环境,例如Microsoft Visual C++、Microsoft .NET Framework、Java环境等;(2)下载CAE软件安装包,解压后找到安装程序;(3)在安装CAE软件时,请按照提示安装,并确保选择正确的安装路径;(4)完整完成安装后,检查软件是否可以正常启动。
2. 用户界面正确的用户界面可以大大提高使用者的操作效率。
下面是一些常见的界面设置:(1)选择合适的配色方案和字体大小;(2)设置显示器的分辨率和屏幕尺寸;(3)在绘图区域中合理地设置视角;(4)通过调整窗口位置和大小,最大化界面的可视范围。
3. 创建模型对于CAE软件来说,创建模型是入门的重要步骤。
以下是一些技巧:(1)选取合适的模型创建方式,例如基于实体、面或线条的方法;(2)使用3D鼠标或其他设备,可以方便地构建模型;(3)使用复制、旋转、移动等基本操作,可以快速地模拟出复杂的结构。
4. 自动网格生成(1)在创建模型时就尽可能地避免生成网格的瓶颈;(2)通过调整参数和模型的几何形状,可以加快自动网格生成的进程;(3)可以通过手动添加节点和控制网格密度等方式,对自动生成的网格进行微调。
5. 分析和优化在进行CAE仿真分析时,需注意以下事项:(1)尽量选取合适的分析方式和求解器,以达到效率和精度的平衡;(2)加速求解器的速度,可以通过并行计算、减少计算节点等方式;(3)在完成分析之后,可以使用优化技术对模型进行进一步的改进,以达到更好的性能指标。
总之,CAE软件的操作方法需要大量的实践和经验积累。
只有正确地掌握这些操作技巧,才能运用CAE技术解决实际的工程问题。
CAE软件操作小百科
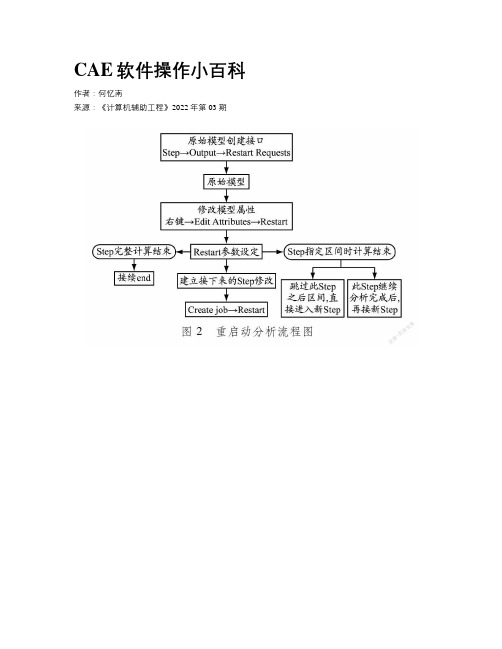
CAE软件操作小百科作者:***来源:《计算机辅助工程》2022年第03期1.什么是重启动分析?重启动分析是Abaqus软件自带的过程分析功能,主要用于2种情况:第一种情况主要用于天灾人祸等非人力控制因素,例如计算机宕机、磁盘空间不足、已达到分析步指定的最大增量等;第二种情况主要是人为特殊需求,例如因考量分析目的,需要从某时间点变更模型设定条件,之后接续分析等特殊情况。
在铁片下压迫使铜片包裹不同制造表面的铜导线的仿真(见图1)分析中,铁片在下降过程中会首先接触并压迫铜片,使铜片弯折包裹导线,但在铜片对导线形成紧密包裹的大部分过程中,导线间其实并没有产生紧密接触,导线间摩擦力对于该过程仿真的影响不明显,可是从最终变形图看,导线间摩擦力对最终结果的影响非常明显。
若将铁片整个压迫过程分为数段,将整个分析划分为数个间隔,分析的前大半段压迫过程不需要进行重复分析,只在最后一个间隔即在最后紧密接触段之前设置重启动操作,更改铜导线间摩擦系数,即可实现分析目的。
2.如何设置重启动分析?在Abaqus中启用重启动功能时,需要在原始计算模型的基础上进行重启动设置。
应先对计算模型进行正常计算步骤如材料、载荷等设置,如果条件允许最好先试运行一次,避免出现错误。
重启动功能在软件Step模块下主菜单output选项中的Restart Requests项进行设置。
设置选项包括需要重启动的分析步、输出重启动文件的频率等。
在弹出的Restart Requests对话框中,如果是Standard隐式分析,会在Step后出现Frequency选项,且默认值为0,代表当前Step并不输出重启动分析数据,如改为1则代表在每个时间增量步都输出重启动分析数据,输出的数据格式有restart(.res)、analysis database (.abq, .mdl, .pac, and .stt)、part(.prt)、selected results(.sel)、output database files (.odb)等。
CAE软件操作小百科(47)

CAE软件操作小百科(47)1. 引言1.1 CAE软件操作小百科(47)CAE软件操作小百科(47)是专门为工程师和设计师准备的一系列操作指南,旨在帮助他们更加熟练地运用CAE软件进行工程分析和设计。
本篇文章将介绍CAE软件的基本概念、常用功能、操作注意事项、快捷键以及模型导入与导出等内容,旨在帮助读者更好地理解和使用CAE软件。
CAE软件,全称为计算机辅助工程软件(Computer-Aided Engineering Software),是一种利用计算机技术进行工程分析和设计的专业软件。
它能够帮助工程师进行结构、热流、疲劳、振动等方面的分析,从而优化产品设计和提高工程效率。
在工程领域中,CAE软件已经成为不可或缺的工具。
在我们将详细介绍CAE软件的基本概念,包括其工作原理和应用领域;常用功能,如建模、网格划分、求解器设置等;操作注意事项,例如数据准确性、模型简化等;快捷键的使用方法以及模型的导入和导出技巧。
通过本文的阐述,希望读者能够更加深入地了解和掌握CAE软件的操作技巧,为工程设计和分析工作提供更多便利和支持。
2. 正文2.1 CAE软件基本概念CAE,即计算机辅助工程,是一种利用计算机技术对工程问题进行仿真、分析和优化的方法。
它通过建立数学模型,应用数值计算方法,对工程问题进行求解。
CAE软件是支持CAE技术实现的工具,可以帮助工程师进行复杂的工程分析和设计。
CAE软件通常包括建模、网格划分、求解和后处理等模块。
建模模块用于构建工程模型,网格划分模块将模型划分为网格用于数值计算,求解模块用于求解工程方程,后处理模块用于分析和可视化计算结果。
在CAE软件中,工程模型可以是几何模型、有限元模型、流体网格模型等,不同的模型适用于不同的工程问题。
用户可以根据具体需求选择合适的模型进行分析。
CAE软件还包括各种模拟工具,如结构分析、热传导分析、流体力学分析等,用户可以根据需要选择合适的工具进行仿真和分析。
CAE软件操作小百科(4)

几何 、 元设 置? 单
如果 是几何 面但 没 有需 要 的边 界 线 , 在 几何 可 面 已有 的 边 界 线 上 创 建 节 点 , 后 利 用 nds 然 oe— l e/ra i scet n e选项 建立 需要 的线 , 利 用 poet 项 再 r c选 j 映射 或 者直接 映射 刚才 创 建 的节 点 , 点 可 直 接 划 节 分 面. 可 采 用 最 简 单 的 办 法 , 择 sr ei le 也 选 uf dt i /n f m sreg 选 项 ( r u e o f d 如果是 网格 面 , 以利用 go 可 em/
作者简介 :刘志刚( 97 1 8 一), , 男 安徽芜湖人 , 士研 究生, 究方向为 固体力学 ,E ma ) aki8 @ht i cr 硕 研 ( - i brl 7 o l o l u刚 , :A 等 C E软 件操作 小百科 ( ) 4
l9 3
行r e , e s 但可以通过 F M h 3键调整节点 的位 置 以保
进 入 HyeMeh界 面 , 用 快 捷 键 “ ” 入 设 pr s 使 O进
f - sr c 选项) 建立所需的线后再映射. e - u ae a- f r ,
7 在 HyeMeh 中 , s pr s QIMeh的定 义 是 什 么? 与 普 通 Meh有什 么区别 ? s
Q s I h即 Q a t Id xMeh 是 H p r s Me uly n e s , i y eMeh一
况, 采用路径选取的方式会更快速 、 有效 , 可避 免进
行逐 点选 取 .
收稿 日期 : 0 10 —3 2 1 -52
CAE软件操作小百科(6)
计 算 结 束 后 会 产 生 “F L MO E rt U L D I s”和 .
“U L D Ld” F L MO E . b 2个文 件 . C ) 应 力集 中 的 区 域 分 割 和 细 化 后 , 新 求 Z将 重
解 . 时 , 边 界 条 件 区 域 操 作 Sai Src rl ̄ 此 在 t c t t a- t u u -
, , , , 0, 0
C DOF, B …
FT SH NI
板 中 N wo- ̄aho eiul的数字 0改 为最 大 e t -R p snR s as n- d 工 步 数 ; 果 该 接 触 解 析 不 收 敛 , 可 通 过 查 看 如 则
( 济 大 学 应 用 力 学研 究 所 , 海 同 上 20 9 ) 0 02
KESUM E
1 如 何 使用 子域 法求解 应 力?
/s l ou
求解一个部件的位移所需的网格数量远小于求
解应 力 所需 的 网格数 量 , 由此产 生子 域法 求解 应力 .
在 A S S Wok e c N Y rb nh中 可 按 如 下 方 法 实 现 子 域 法 求解 应力 .
/ NP I UT, I E,b o, !CB FL cd , : 1
然 后 点 击 N me e c o s I pr N me a d Sl t n m o a d ei t
Sl tn 选 择 子 域 的 分 割 面 , 命 名 为 ee i , co
“ t un a y Cu Bo d r ”.
() 先求解整个模 型的位移 , 结: 1首 在 果中操 作
Slt n Isr C m a d , 后 点 击 I p r, 择 0 i _ net o m n s 然 u0 m ot选 预先 编 辑好 的文 本 文 件 , 件 内容 ( 可 直 接 编 写 文 也 到命 令 区域 ) 为
简述cae的功能以及实际操作流程

简述cae的功能以及实际操作流程下载温馨提示:该文档是我店铺精心编制而成,希望大家下载以后,能够帮助大家解决实际的问题。
文档下载后可定制随意修改,请根据实际需要进行相应的调整和使用,谢谢!并且,本店铺为大家提供各种各样类型的实用资料,如教育随笔、日记赏析、句子摘抄、古诗大全、经典美文、话题作文、工作总结、词语解析、文案摘录、其他资料等等,如想了解不同资料格式和写法,敬请关注!Download tips: This document is carefully compiled by theeditor.I hope that after you download them,they can help yousolve practical problems. The document can be customized andmodified after downloading,please adjust and use it according toactual needs, thank you!In addition, our shop provides you with various types ofpractical materials,such as educational essays, diaryappreciation,sentence excerpts,ancient poems,classic articles,topic composition,work summary,word parsing,copy excerpts,other materials and so on,want to know different data formats andwriting methods,please pay attention!CAE技术:功能概述与实际操作流程计算机辅助工程(Computer-Aided Engineering,简称CAE)是一种利用计算机软件进行工程分析和模拟的技术。
CAE软件操作小百科-工程
CAE软件操作小百科-工程1 CAE软件与CAD软件接口问题在模型制作方面,CAD软件的功能远远强于CAE软件,因此,CAD软件与CAE软件之间的接口问题就显得比较重要.模型传递主要有2种方法:一种是通过专用数据接口进行传递,另一种是通过标准图形格式进行传递.目前,流行的图形标准格式有IGES,SAT,STEP和ParaSolid.其中,IGES格式标准不很严格,大部分软件都有该接口,但只能传递面元素,不能传递体,遇到复杂模型容易出错;其他几种格式相对成熟,应用广泛.如ANSYS Workbench和SolidWorks,NX 等设计有专业数据接口,命令为:SolidWorks→ANSYS 13→Workbench通过标准格式读入命令为:File→Import→Geometry File2 ANSYS可靠性计算方法工程结构要求具有一定的可靠性.可靠性指设为定量的值实际上具有不确定性,它们应该被认为是具有某种分布特性的随机变量.结构可靠性分析的任务就是考虑各类不确定性因素对结构分析的影响.以静力学分析为例,可以将弹性模量、载荷和结构尺寸等设为参数变量,需要在结果中设置一个或几个输出变量.使用模块为Six Sigma Analysis进行可靠性计算时用命令Design of Experiments(SSA)→P1 Pressure Magnitude→Distribution Type,选择参数变量的分布类型,如线性分布、正态分布等.使用命令Design of Experiments(SSA)→Design of Experiments Typ e,选择实验设计类型,然后利用蒙特卡罗法、响应面法等进行数据分析.3 动力学软件与有限元软件柔体功能的区别在动力学软件中,首先利用有限元技术,计算出构件的自然频率和对应的模态振型,然后通过各个模态振型的线性叠加计算得出构件的位移;在有限元软件中,则严格按照物理方程、几何方程和平衡方程等进行数值计算得到.二者的计算过程有本质的区别.4 对于平面应力问题,用2D单元分析比用3D单元准确对于平面应力问题,采用3D单元进行网格划分时厚度方向太薄,会造成3D单元畸变,质量较低;而采用2D单元进行网格划分,则可以保证较高的单元精度.因此,使用2D单元分析平面应力问题比使用3D单元精度要高.5 在ANSYS Workbench中对壳单元做接触分析时厚度的考虑在ANSYS Workbench中,用壳单元做接触对时默认为中面接触,但在实际中却是壳体的顶面或底面接触.在ANSYS Workbench中可以使用以下2种方法实现顶面或底面的接触:(1)使用中面偏移.命令为Connections→Contacts→Offset,输入半个板厚数值.(2)使用宏命令Connections→Contacts→Commands,输入“keyopt,cid,11,1”.在等厚度时,上述2种方法都可以使用,但在变厚度时,只能使用方法(2).6 变厚度壳在ANSYS Workbench中的设置对于变厚度壳的厚度值,可以通过以下方法实现:(1)对于厚度有规律的,可以使用厚度函数实现,如Thickness=0.1x2+0.2.(2)对于厚度无规律的,可以使用External Date参数化实现.在壳上取很多点的厚度和坐标信息,编写好Excel后改成cvs格式,读入到软件中,命令为External Date→Setup→Date Source;读入编辑好的cvs文件,然后设置好单位;最后将External Date与计算模型中的Setup连接起来.利用该方法可以实现厚度、压力、温度和传热系数等多个物理量的参数化.7 在ANSYS Workbench中生死单元的运用在ANSYS Workbench中,可以利用生死单元进行一些特殊的计算.首先提取并命名需要激活或者杀死的单元,命令为Model→Named Selections,选择单元区域.使用命令Model→Static Structural→Commands,激活或者杀死已经选择的单元.根据具体需要插入语句,如杀死b1区域的单元,语句为:NROPT,FULLekill,b1esel,s,livensle,snsel,inved,all,all,0allsel激活b1区域的单元,语句为:NROPT,FULLEALIVE,b1cmsel,s,b1nsle,sDDELE,all,allallsel8 在ANSYS Workbench中,复杂模型网格的划分技巧对复杂模型划分二次四面体网格时,由于模型复杂,特别是当应力集中区域过多而使需要网格细化的区域很多时,网格往往划不出来、划得不理想或者有的网格控制命令实现不了.可以将模型分割成若干部分,按照先难后易的顺序逐个划分:先选择控制命令较多的部分划分网格,再选择控制命令较少的部分划分网格,以此类推.命令如下:选择需要划分部分(右键)→Generate Mesh on Selected Bodies.对于局部网格细化,可以采用以下几种方法:(1)应力集中区域直接设定划分尺寸,缺点是网格数量比较多.(2)使用命令Model→Insert→Mapped Face Meshing,选择需要细划的面;使用命令Model→Insert→Sizing,选择需要细划的边.该方法划分网格质量较高、网格数量相对较少.(3)使用命令Model→Insert→Sizing→Type→Sphere of Influence→Sphere Center,然后选择局部坐标、球半径以及控制尺寸等.该方法限制网格划分的范围,可以控制网格数量.9 在ANSYS Workbench中模拟摩擦生热模拟摩擦生热,实际是热结构瞬态耦合问题,对于耦合问题需要使用耦合单元,在此选用SOLID 226单元为例,命令为Model→Geometry→Solid→Commands,输入“ET,1,SOLID 226,11”.因为接触单元默认情况下没有温度自由度,所以需要修改,使接触单元具有温度自由度;另外,目标单元默认情况下为低阶单元,而SOLID 226却是高阶单元,所以也需要将目标单元修改成高阶单元;命令为Model→Connections→Contacts→Commands,并输入以下语句:keyopt,cid,1,1keyopt,cid,1,1。
CAE软件操作小百科(续1)
CAE软件操作小百科(续1)作者:付昆昆武秀根来源:《计算机辅助工程》2010年第04期如何在MSC Marc中模拟变形体的旋转?在用MSC Marc处理变形体旋转问题时,一般先建立刚性体,用Glue命令将刚体粘贴在变形体上,通过对刚性体施加转速或转矩进而带动变形体旋转. MSC Marc对刚性体施加转速或转矩时需设定控制节点与辅助节点. 控制节点有3个方向的平动自由度,将力和平动位移施加在控制节点上,控制刚性体的平动;而辅助节点有3个方向的旋转自由度,将转矩和旋转位移施加在辅助节点上,控制刚性体的旋转在MSC Marc中如何使用局部坐标系?若需要在MSC Marc中建立局部坐标系(如柱坐标系等),需设定局部坐标系的位置,然后通过Modeling Tools→Transformations选项选择需转换为局部坐标系的节点进行转换. 在设定边界条件时选择转换后的节点,之后边界条件会被自动转换到局部坐标系下如何在MSC Marc中应用重启动命令?在进行大规模非线性分析时,计算的步长往往相差较大,当设置的控制参数无法使求解问题有效收敛时,需要在分析中使用重启动命令,即保留每步或不收敛前一步的计算文件,将该文件作为初始步,修改控制参数后(如减小步长)继续进行分析. 具体步骤为:Job→Job Parameters→Restart→Write用于生成重启动文件,重启动文件名字为jobname.t08;用于读入重启动文件,改变控制参数后继续进行分析如何在MSC Marc中考虑具有加强筋或帘线作用的材料?MSC Marc在模拟轮胎帘线和混凝土中的加强筋时提供Rebar单元. 在MSC Marc中有2种方式定义Rebar单元. (1)通过使用相同的单元相关性将Rebar单元的单元矩阵添加到其对应单元的单元矩阵中,即二者拥有相同的单元形式,这样,Rebar单元就与其对应的单元拥有相同的节点、不同的单元编号,相当于在单元矩阵中增加其对应单元的材料属性.(2)使用INSERT选项设定Rebar单元,即采用线单元(二维)或面单元(三维)考虑,即使用不同形式的单元进行分析. 第1种形式的Rebar单元由于采用相同的节点编号,不增加多余的自由度,计算量较小;第2种形式的Rebar单元由于采用不同形式的单元,增加求解规模和计算量,但适用于具有任意方向的帘线或混凝土加强筋,且该形式的Rebar单元在视觉上更符合物理模型中RBE2单元与RBE3单元有何区别?RBE2单元:定义若干个从节点(非独立节点)与某个主节点(独立节点)间的相互约束关系,从而使从节点在选定的自由度(DOF)上与主节点保持一致,包括位移也保持一致. 因此,属于刚性连接.RBE3单元:不是刚性连接,主要用于从1个节点向多个节点力传递的模拟.用该单元可作力的均匀传递,也可设置权重因数,作力的非均匀传递.6 如何对圆形面进行高质量的四边形网格划分?网格划分的原则是将模型剖分为简单且规则图1 “钱币”原理划分网络的形状,然后利用有限元软件提供的网格划分工具进行划分.对圆形面可利用“钱币”原理剖分:将圆面中部剖分成正方形区域,像钱币的形状,其他部分以正方形对角线为基准进行4等分,可得到5个简单规则的形状,从而实现高质量的网格划分,见图(摘自同济大学郑百林教授《CAE操作技能与实践》课程讲义.)。
cae技术的使用流程有哪些
CAE技术的使用流程有哪些1. 简介CAE(Computer-Aided Engineering)即计算机辅助工程,是一种通过计算机软件模拟各种工程问题解决方案的技术。
它可以在产品设计阶段预测产品性能、优化设计方案,并降低实际测试和制造的成本。
本文将介绍CAE技术的使用流程,并列出主要步骤和工具。
2. CAE使用流程概述CAE技术的使用流程通常包括以下几个主要步骤:2.1. 问题定义和建模在CAE分析之前,首先需要明确待解决的问题,如优化产品设计、预测产品性能等。
然后,根据问题的特点进行建模,将问题抽象为数学模型,并选择相应的数值方法和算法。
2.2. 前处理前处理阶段是进行CAE分析的准备阶段。
在这个阶段,需要将建模阶段得到的模型导入到CAE软件中,并进行材料属性、边界条件和加载条件等的定义和设置。
此外,还需要对模型进行几何网格剖分和单元类型的选择。
2.3. 求解和后处理求解阶段是CAE分析的核心阶段,通过数值计算方法对模型进行求解,得到数值解。
求解会消耗大量计算资源,需根据所用的CAE软件和计算机配置进行合理规划。
求解完成后,进入后处理阶段。
后处理阶段包括结果的可视化和分析,如生成各种图表、动画和报告等。
通过后处理,可以直观地观察分析结果,并基于结果做出合理的决策。
2.4. 结果验证和优化CAE分析的结果通常需要与实际测试结果进行比较,以验证模型的准确性和可靠性。
根据测试结果和分析结果之间的差异,可以针对问题进行优化和改进。
优化方法可以是参数优化、拓扑优化等。
3. CAE使用的主要工具在CAE技术的使用流程中,有一些主要的工具被广泛采用:3.1. 有限元分析软件(FEA)有限元分析软件是CAE技术使用中最常用的工具之一。
它可以将复杂的物理模型分割成许多简单的有限元单元,并对每个单元进行数值计算,从而得到整个模型的数值解。
常见的有限元分析软件有ANSYS、ABAQUS等。
3.2. 计算流体力学软件(CFD)计算流体力学软件主要用于模拟气体和液体在力学和热学方面的行为。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
CAE软件操作小百科(36)
作者:王峰
来源:《计算机辅助工程》2017年第02期
1如何利用Abaqus进行非线性屈曲分析
弧长法是目前结构非线性分析中数值计算最稳定、计算效率最高且最可靠的迭代控制方法之一,可用于跳跃失稳问题的研究,也可以用于分支屈曲的后屈曲研究. 分支屈曲的后屈曲分析不能直接在分支屈曲后面研究,而是要给一个初始缺陷,使力学响应呈连续状态(非线性).
Abaqus根据分支屈曲模型取线性组合、根据静力分析结果或直接指定等3种方法定义初
始缺陷. 若已知初始缺陷,则一般采用第一种方法.
(1)特征屈曲分析(分析步选择Buckle). (2)将这些特征屈曲模态添加到理想的几何体中,作为初始缺陷(见图1,菜单栏中选择Model→Edit Keywords). Abaqus通过节点标签
输入初始缺陷(imperfection),但是软件不会去确认2个模型的兼容性,所以要特别注意节点标号的一致性. 一般来说因数w在第1阶模态最大,而且w一般取结构几
何参数的倍数,如壳的厚度的0.1倍等. (3)利用弧长法进行非线性分析(分析步选择Static,Riks).
2如何在Abaqus中建立弹簧单元
在Abaqus中建立弹簧单元一般有2种方法:定义Spring单元和定义Wire Feature.
方法一:定义Spring单元. 在Abaqus/CAE中进入Interaction模块,在菜单栏中选择Special→Springs/Dashpots→Manager,进入弹簧阻尼单元管理器,可以选择创建两点弹簧或者接地弹簧,见图2. 点击Continue按钮可以对弹簧刚度、位置和自由度进行设置.
方法二:定义Wire Feature. (1)创建Wire Feature. 在Abaqus/CAE中进入Interaction模块,在工具条中选择(Create Wire Feature),在弹出的对话框中点击“+”,选择两点创建Wire Feature. (2)为Wire Feature赋予属性. 在Interaction模块下点击工具条中的Create Connector Section,将Connection Category选为Basic,Translational type选为Cartesian,并点击Continue;在弹出的Create Connector Section对话框中设置弹簧的属性,见图3. (3)在Interaction模块下点击工具条中的Create Connector Assignment赋予属性.
需要注意的是,虽然2种方法的作用一致,但是方法二在一些情况下使用更加方便,即方法二可以同时定义3个方向的刚度,而且可以模拟非线性弹簧,此外还可以同时定义线性或非线性阻尼等,这对于分析带有减振装置的复杂结构十分便捷.
3Abaqus接触问题分析
Abaqus/Standard 的接触对由主面(master surfer)和从面(slave surfer)构成. 在模拟过程中,接触方向总是主面的法线方向,从面上的节点不会穿越主面,但主面上的节点可以穿越从面. 在定义主面和从面时要注意以下问题.
(1)主从面的定义.1)选择刚度较大的面作为主面,此处的刚度不仅要考虑材料特性,也要考虑结构刚度. 刚体必须作为主面,从面则必须是柔体上的面(可以是施加了刚体约束的柔体). 2)主面不能由节点构成,并且必须连续. 如果相对滑动形式为有限滑移,则主面在发生接触的部位必须是光滑的(即不能有尖角). 3)如果为有限滑移,则整个分析过程中尽量不要让从面节点落到主面之外,更不要落到主面的背面,否则收敛会出现问题.
(2)滑移形式.有限滑移要求主面是光滑的,否则会出现收敛问题. 如果主面在发生接触的部位存在尖角或凹角,应该在此尖角处把主面分为2部分分别定义. 对于由单元构成的主面,Abaqus 会自动进行平滑处理. 对于小滑移的接触对,Abaqus/Standard在分析的开始就确定了从面节点与主面的关系,在整个分析过程中这种接触关系不会再发生变化.
(3)接触面间的几何尺寸位置和Adjust参数. 如果不特别设置,Abaqus会直接根据模型尺寸位置判断从面和主面的距离,从而确定二者的接触状态,这就要求建模时模型尺寸必须非常精确. 一般情况下,模型尺寸往往会存在误差,可以应该利用Adjust参数调整从面节点的初始坐标. 如果从面节点与主面的距离小于这个参数,Abaqus将调整这些节点的初始坐标,使其与主面的距离为0(刚好接触).
(4)收敛问题.在进行接触分析时,难免会遇到收敛问题(往往是因为模型中有问题),例如存在刚体位移、过约束、接触定义不当等,这时应该查看MSG文件,然后采取相应措施.
(摘自同济大学郑百林教授《CAE操作技能与实践》课堂讲义)
(待续)。