MATLAB_OTSU
用MATLAB优化工具箱解线性规划

用MATLAB优化工具箱解线性规划线性规划是运筹学中的一个研究对象,它通常是以线性方程组的形式来描述数学模型,极大(或极小)化线性函数,同时满足一定的线性限制条件。
而MATLAB是一种十分流行的数学计算软件,其优化工具箱提供了一些功能强大的优化算法,可以用来解决一些复杂的优化问题,包括线性规划问题。
一、线性规划问题的定义线性规划问题的一般形式可以描述为:$min/max$ $c^Tx$$subject$ $to$:$Ax \le b$$x \ge 0$其中,$c^Tx$是一个线性函数,称为线性目标函数,$A$是一个$m\times n$的系数矩阵,$b$是一个$m\times1$的列向量,$x$是一个$n\times1$的列向量,是待求解的变量,我们称之为决策变量。
$x_j$表示变量$x$的第$j$个分量,$m$和$n$分别是限制条件数目和变量数目。
$Ax \le b$是一个线性等式系统,约束了$x$的取值范围,$x \ge0$要求$x$的分量非负,这被称为非负约束条件。
二、使用MATLAB函数求解线性规划问题MATLAB中的优化工具箱提供了一些函数,可以用来求解线性规划问题,其中最常用的函数是“linprog”。
linprog函数是求解线性规划问题的标准函数,在使用之前需要做一些准备工作:(1)确定目标函数和约束条件:目标函数和约束条件应该以线性方程组的形式表达。
(2)将方程组转换为标准形式:标准形式是指将约束条件转换为$Ax \le b$的形式,且决策变量的非负约束被包含在这个矩阵中。
(3)定义参数:包括目标函数和约束条件中的系数矩阵和向量。
(4)运行函数:使用linprog函数求解。
下面是linprog函数的语法格式:[x,fval,exitflag,output,lambda]=linprog(f,A,b,Aeq,beq,lb,ub,x 0,options)linprog函数的参数解释如下:(1)f:目标函数的系数向量。
Matlab深度学习工具箱使用方法
Matlab深度学习工具箱使用方法深度学习作为一种强大的机器学习技术,已经在许多领域展现了出色的性能和应用潜力。
为了帮助广大研究人员和工程师更好地使用深度学习技术,MathWorks公司推出了Matlab深度学习工具箱。
本文将介绍该工具箱的基本使用方法,并结合实例演示其强大的功能。
一、准备工作在使用Matlab深度学习工具箱之前,我们需要进行一些准备工作。
首先,确保你的电脑已经安装了Matlab软件和深度学习工具箱。
其次,如果你希望使用GPU进行运算加速,还需要确保你的电脑上安装了适当的GPU驱动程序。
二、创建深度学习模型在Matlab深度学习工具箱中,我们可以使用各种各样的函数和工具来创建深度学习模型。
首先,我们需要选择适合我们任务的网络结构。
Matlab深度学习工具箱中提供了许多常见的深度学习网络结构,如卷积神经网络(CNN)、循环神经网络(RNN)和生成对抗网络(GAN)等。
我们可以根据具体的任务需求选择合适的网络结构。
接下来,我们需要定义模型的输入和输出。
在Matlab深度学习工具箱中,我们可以使用图像数据存储对象(ImageDatastore)和标签数据存储对象(Datastore)来管理和预处理我们的数据。
同时,我们还可以使用预处理函数来对数据进行增强和归一化等操作,以提高模型的性能。
最后,我们可以使用trainNetwork函数来训练我们的深度学习模型。
在该函数中,我们需要指定训练数据、验证数据、损失函数和优化器等参数。
训练完成后,我们可以使用classify函数对新的数据进行分类预测,或使用predict函数对数据进行其他类型的预测。
三、模型调优与评估在创建深度学习模型之后,我们通常需要对其进行调优和评估。
在Matlab深度学习工具箱中,我们可以使用HyperparameterTuner对象来进行超参数的自动调优。
通过指定待调优的超参数范围和调优目标,我们可以在指定的训练框架中自动寻找最优的超参数组合。
MATLAB的常用函数和工具介绍
MATLAB的常用函数和工具介绍MATLAB是一款被广泛应用于科学计算和工程设计的软件,它提供了丰富的函数库和工具箱,能够帮助用户进行数据分析、模拟仿真、图像处理、信号处理等多种任务。
本文将介绍一些MATLAB常用的函数和工具,帮助读者更好地利用MATLAB进行编程和数据处理。
一、MATLAB函数介绍1. plot函数:该函数用于绘制二维图形,如折线图、曲线图等。
通过输入数据点的坐标,plot函数可以帮助用户快速可视化数据分布,同时支持自定义线型、颜色和标注等功能。
2. imread函数:该函数用于读取图像文件,支持常见的图像格式,如JPEG、PNG等。
通过imread函数,用户可以方便地加载图像数据进行后续的处理和分析。
3. fft函数:该函数用于进行快速傅里叶变换,可以将时域信号转换为频域信号。
傅里叶变换在信号处理中广泛应用,通过fft函数,用户可以快速计算信号的频谱信息。
4. solve函数:该函数用于求解方程组,支持线性方程和非线性方程的求解。
用户只需输入方程组的表达式,solve函数会自动求解变量的值,帮助用户解决复杂的数学问题。
5. mean函数:该函数用于计算数据的平均值。
mean函数支持数组、矩阵和向量等多种数据类型,可以方便地对数据进行统计分析。
6. importdata函数:该函数用于导入外部数据文件,如文本文件、CSV文件等。
通过importdata函数,用户可以将外部数据加载到MATLAB中,进行后续的数据处理和分析。
二、MATLAB工具介绍1. MATLAB Editor:这是MATLAB自带的编辑器,可以用于编写和调试MATLAB代码。
它提供了代码高亮、自动缩进和代码片段等功能,能够提高编程效率和代码可读性。
2. Simulink:这是MATLAB的一个强大的仿真工具,用于建立动态系统的模型并进行仿真。
Simulink支持直观的图形化建模界面,用户可以通过拖拽元件和线条来搭建系统模型,进而进行仿真和系统分析。
基于最大类间、类内方差比法的图像分割
最大类间、类内方差比法进行图像分割一、实验目的在理解均匀性图像分割算法的基础上,实现图像的分割,要求对灰度图像和彩色图像均进行实验,并讨论该方法对何种情况下的图像有比较好的分割效果。
二、实验要求建议采用MATLAB 软件编程实现,核心程序不准调用MATLAB 的图像处理函数。
三、实验思路1、分割的基本原理:由于最大类间、类内方差比法是基于图像灰度分布的阈值方法。
数学模型如下:设原图像为f(x,y),经过分割处理后的图像为g(x,y),g(x,y)为二值图像,则有(3-1)1 (,)(,)0 (,)f x y Th g x y f x y Th>=⎧=⎨<⎩2、最大类间方差法与最大类间、类内方差比法的不同:最大类间方差法又叫大津法,简称OTSU。
它是按图像的灰度特性,将图像分成背景和目标2部分。
背景和目标之间的类间方差越大,说明构成图像的2部分的差别越大。
它只需处理类间方差,在Matlab 中grathresh()即为最大类间方差函数,用来寻找阈值。
最大类间、类内方差比法是在最大类间方差法基础上的发展,在少部分教科书上可见。
它是要处理类间方差与类内方差的比值,找到满足二者比值最大时的Th,在Matlab没有此方法的工具函数。
3、本实验阈值Th的确定方法:由于最大类间、类内方差比法图像分割的核心是阈值Th的确定,即要处理类间方差和类内方差的比值,找出最大的比值,此时满足最大比值的Th即为所求。
我们可以将所有类间、类内方差的比值放在一个矩阵中,然后使用find函数找出矩阵的最大值,对应的Th即为所求,。
4、本实验对不同图像的处理方法:针对灰度图像,笔者打算根据如下的实验步骤进行实验仿真;对于彩色图像,笔者打算分别将原图三通道提取出来,然后按照如下的实验步骤分别对单通道分割,然后对处理后的三个通道进行整合,得到新的分割图像。
四、实验步骤1、给定一个初始阈值Th=Th0,将图像分成C1和C2两类;2、分别按下列公式计算两类中的方差σ1^2和σ2^2,灰度均值μ1和μ2,以及图像的总体均值μ;灰度方差:22(,)((,))iii x y c f x y u σ∈=-∑灰度均值:(,)1(,)iii x y c c f x y N μ∈=∑总体均值:111(,)mni j imagef i j N μ===∑∑3、按下式计算两类在图像中的分布概率p1和p2;11c image N p N =21c imageN p N =4、计算类间方差σb^2=和类内方差σin^2;5、选择最佳阈值Th=Th*,使得图像按照该阈值分成C1和C2后,满足两者方差比最大:(41)-(42)-(43)-(44)-(45)-(46)-2221122()()bp p σμμμμ=⋅-+⋅-2221122in p p σσσ=⋅+⋅2*2max , b in Th Th σβσ⎧⎫==⎨⎬⎩⎭6、按下式对原图的像素进行变换**1 (,)(,) 0 (,)f x y Thg x y f x y Th⎧>=⎪=⎨<⎪⎩五、基于MATLAB 的实验仿真 1、应用于灰度图像分割代码clear all; close all;a=imread('D:\我的图片\3.jpg'); a=rgb2gray(a); figure; imshow(a);title('此为原图'); a=double(a); [m,n]=size(a);th=zeros(1,254); %建立一维零矩阵存放类间类内方差比的值;我们需要对灰度值从1到254遍历; for T=1:254(47)-(48)-s1=0;s2=0;c1=0;c2=0;q1=0;q2=0;for i=1:mfor j=1:nif(a(i,j)>=T)s1=a(i,j)+s1;c1=c1+1;endif(a(i,j)<T)s2=a(i,j)+s2;c2=c2+1;endendendu1=s1/c1; %C1的灰度均值;u2=s2/c2; %C2的灰度均值;p1=c1/(c1+c2); %C1的发生概率;p2=c2/(c1+c2); %C2的发生概率;u=(s1+s2)/(c1+c2); %样本的总体均值;x=p1*(u-u1)*(u-u1)+p2*(u-u2)*(u-u2); %类内方差;for i=1:mfor j=1:nif(a(i,j)>=T)q1=(a(i,j)-u1)*(a(i,j)-u1)+q1;endif(a(i,j)<T)q2=(a(i,j)-u2)*(a(i,j)-u2)+q2;endendendy=p1*q1+p2*q2; %类间方差;c=x/y;th(T)=c; %零矩阵每个位置都存放着类间、类内方差的比值;endd=find(th==max(th(:))); %寻找方差比最大时,该方差比在th矩阵中所处的位置,也就是具体的阈值TTh=d;b=zeros(m,n); %新建二维矩阵b用来显示分割后的图像for i=1:mfor j=1:nif(a(i,j)>=Th)b(i,j)=255;endif(a(i,j)<Th)b(i,j)=0;endendendfigure;imshow(b);title(‘此为分割结果’);二、应用于彩色图像的分割代码clear all;close all;X=imread('D:\我的图片\3.jpg');figure;imshow(X);title('此为原图');X=double(X);I=X; %建立与原图相等的矩阵I,用来将X三通道分割的结果整合再分别赋予I,作为最后的输出结果;R=X(:,:,1);G=X(:,:,2);B=X(:,:,3);[m,n]=size(R); %R,G,B作为X三通道矩阵,肯定维度都一样;%对通道1进行分割;th1=zeros(1,254); %建立一维零矩阵存放类间类内方差比的值;我们需要对灰度值从1到254遍历;for T=1:254s1=0;s2=0;c1=0;c2=0;q1=0;q2=0;for i=1:mfor j=1:nif(R(i,j)>=T)s1=R(i,j)+s1;c1=c1+1;endif(R(i,j)<T)s2=R(i,j)+s2;c2=c2+1;endendendu1=s1/c1; %C1的灰度均值;u2=s2/c2; %C2的灰度均值;p1=c1/(c1+c2); %C1的发生概率;p2=c2/(c1+c2); %C2的发生概率;u=(s1+s2)/(c1+c2); %样本的总体均值;x=p1*(u-u1)*(u-u1)+p2*(u-u2)*(u-u2); %类内方差;for i=1:mfor j=1:nif(R(i,j)>=T)q1=(R(i,j)-u1)*(R(i,j)-u1)+q1;endif(R(i,j)<T)q2=(R(i,j)-u2)*(R(i,j)-u2)+q2;endendendy=p1*q1+p2*q2; %类间方差;z=x/y;th1(T)=z; %零矩阵每个位置都存放着类间、类内方差的比值;endd1=find(th1==max(th1(:))); %寻找方差比最大时,该方差比在th矩阵中所处的位置为d1,也就是具体的阈值T1Th1=d1;for i=1:mfor j=1:nif(R(i,j)>=Th1)R(i,j)=255;endif(R(i,j)<Th1)R(i,j)=0;endendend%对通道2进行分割th2=zeros(1,254);for T=1:254s1=0;s2=0;c1=0;c2=0;q1=0;q2=0;for i=1:mfor j=1:nif(G(i,j)>=T)s1=G(i,j)+s1;c1=c1+1;endif(G(i,j)<T)s2=G(i,j)+s2;c2=c2+1;endendendu1=s1/c1;u2=s2/c2;p1=c1/(c1+c2);p2=c2/(c1+c2);u=(s1+s2)/(c1+c2);x=p1*(u-u1)*(u-u1)+p2*(u-u2)*(u-u2); for i=1:mfor j=1:nif(G(i,j)>=T)q1=(G(i,j)-u1)*(G(i,j)-u1)+q1;endif(G(i,j)<T)q2=(G(i,j)-u2)*(G(i,j)-u2)+q2;endendendy=p1*q1+p2*q2;z=x/y;th2(T)=z;endd2=find(th2==max(th2(:)));Th2=d2;for i=1:mfor j=1:nif(G(i,j)>=Th1)G(i,j)=255;endif(G(i,j)<Th1)G(i,j)=0;endendend%对通道3进行分割th3=zeros(1,254);for T=1:254s1=0;s2=0;c1=0;c2=0;q1=0;q2=0;for i=1:mfor j=1:nif(B(i,j)>=T)s1=B(i,j)+s1;c1=c1+1;endif(B(i,j)<T)s2=B(i,j)+s2;c2=c2+1;endendendu1=s1/c1;u2=s2/c2;p1=c1/(c1+c2);p2=c2/(c1+c2);u=(s1+s2)/(c1+c2);x=p1*(u-u1)*(u-u1)+p2*(u-u2)*(u-u2);for i=1:mfor j=1:nif(B(i,j)>=T)q1=(B(i,j)-u1)*(B(i,j)-u1)+q1;endif(B(i,j)<T)q2=(B(i,j)-u2)*(B(i,j)-u2)+q2;endendendy=p1*q1+p2*q2;z=x/y;th3(T)=z;endd3=find(th3==max(th3(:)));Th3=d3;for i=1:mfor j=1:nif(B(i,j)>=Th3)B(i,j)=255;endif(B(i,j)<Th3)B(i,j)=0;endendendI(:,:,1)=R;I(:,:,2)=G;I(:,:,3)=B;figure;imshow(I);title('此为分割结果');六、实验运行示例:原始彩色图像,亦为两个程序同一输入:1、针对灰度图像的实验结果2、针对原彩色图像的实验结果对比两次试验我们发现,对于同一张彩色图片,将其按照本实验程序进行分割处理,再将原图转换为灰度图按照相同程序进行分割,二者有一定差别。
数字图像处理 matlab代码
MATLAB实用源代码图像读取及灰度变换I=imread('cameraman.tif');%读取图像subplot(1,2,1),imshow(I) %输出图像title('原始图像') %在原始图像中加标题subplot(1,2,2),imhist(I) %输出原图直方图title('原始图像直方图') %在原图直方图上加标题图像旋转I = imread('cameraman.tif');figure,imshow(I);theta = 30;K = imrotate(I,theta); % Try varying the angle, theta. figure, imshow(K)边缘检测I = imread('cameraman.tif');J1=edge(I,'sobel');J2=edge(I,'prewitt');J3=edge(I,'log');subplot(1,4,1),imshow(I);subplot(1,4,2),imshow(J1);subplot(1,4,3),imshow(J2);subplot(1,4,4),imshow(J3);1.图像反转MATLAB 程序实现如下:I=imread('xian.bmp');J=double(I);J=-J+(256-1); %图像反转线性变换H=uint8(J);subplot(1,2,1),imshow(I);subplot(1,2,2),imshow(H);2.灰度线性变换MATLAB 程序实现如下:I=imread('xian.bmp');subplot(2,2,1),imshow(I);title('原始图像');axis([50,250,50,200]);axis on; %显示坐标系I1=rgb2gray(I);subplot(2,2,2),imshow(I1);title('灰度图像');axis([50,250,50,200]);axis on; %显示坐标系J=imadjust(I1,[0.1 0.5],[]); %局部拉伸,把[0.1 0.5]内的灰度拉伸为[0 1] subplot(2,2,3),imshow(J);title('线性变换图像[0.1 0.5]');axis([50,250,50,200]);grid on; %显示网格线axis on; %显示坐标系K=imadjust(I1,[0.3 0.7],[]); %局部拉伸,把[0.3 0.7]内的灰度拉伸为[0 1] subplot(2,2,4),imshow(K);title('线性变换图像[0.3 0.7]');axis([50,250,50,200]);grid on; %显示网格线axis on; %显示坐标系3.非线性变换MATLAB 程序实现如下:I=imread('xian.bmp');I1=rgb2gray(I);subplot(1,2,1),imshow(I1);title(' 灰度图像');axis([50,250,50,200]);grid on; %显示网格线axis on; %显示坐标系J=double(I1);J=40*(log(J+1));H=uint8(J);subplot(1,2,2),imshow(H);title(' 对数变换图像');axis([50,250,50,200]);grid on; %显示网格线axis on; %显示坐标系4.直方图均衡化MATLAB 程序实现如下:I=imread('xian.bmp');I=rgb2gray(I);figure;subplot(2,2,1);imshow(I);subplot(2,2,2);imhist(I);I1=histeq(I);figure;subplot(2,2,1);imshow(I1);subplot(2,2,2);imhist(I1);5. 线性平滑滤波器用MA TLAB实现领域平均法抑制噪声程序:I=imread('xian.bmp');subplot(231)imshow(I)title('原始图像')I=rgb2gray(I);I1=imnoise(I,'salt & pepper',0.02);subplot(232)imshow(I1)title(' 添加椒盐噪声的图像')k1=filter2(fspecial('average',3),I1)/255; %进行3*3模板平滑滤波k2=filter2(fspecial('average',5),I1)/255; %进行5*5模板平滑滤波k3=filter2(fspecial('average',7),I1)/255; %进行7*7模板平滑滤波k4=filter2(fspecial('average',9),I1)/255; %进行9*9模板平滑滤波subplot(233),imshow(k1);title('3*3 模板平滑滤波');subplot(234),imshow(k2);title('5*5 模板平滑滤波');subplot(235),imshow(k3);title('7*7 模板平滑滤波');subplot(236),imshow(k4);title('9*9 模板平滑滤波');6.中值滤波器用MA TLAB实现中值滤波程序如下:I=imread('xian.bmp');I=rgb2gray(I);J=imnoise(I,'salt&pepper',0.02);subplot(231),imshow(I);title('原图像');subplot(232),imshow(J);title('添加椒盐噪声图像');k1=medfilt2(J); %进行3*3模板中值滤波k2=medfilt2(J,[5,5]); %进行5*5模板中值滤波k3=medfilt2(J,[7,7]); %进行7*7模板中值滤波k4=medfilt2(J,[9,9]); %进行9*9模板中值滤波subplot(233),imshow(k1);title('3*3模板中值滤波');subplot(234),imshow(k2);title('5*5模板中值滤波');subplot(235),imshow(k3);title('7*7模板中值滤波');subplot(236),imshow(k4);title('9*9 模板中值滤波');7.用Sobel算子和拉普拉斯对图像锐化:I=imread('xian.bmp');subplot(2,2,1),imshow(I);title('原始图像');axis([50,250,50,200]);grid on; %显示网格线axis on; %显示坐标系I1=im2bw(I);subplot(2,2,2),imshow(I1);title('二值图像');axis([50,250,50,200]);grid on; %显示网格线axis on; %显示坐标系H=fspecial('sobel'); %选择sobel算子J=filter2(H,I1); %卷积运算subplot(2,2,3),imshow(J);title('sobel算子锐化图像');axis([50,250,50,200]);grid on; %显示网格线axis on; %显示坐标系h=[0 1 0,1 -4 1,0 1 0]; %拉普拉斯算子J1=conv2(I1,h,'same'); %卷积运算subplot(2,2,4),imshow(J1);title('拉普拉斯算子锐化图像');axis([50,250,50,200]);grid on; %显示网格线axis on; %显示坐标系8.梯度算子检测边缘用MA TLAB实现如下:I=imread('xian.bmp');subplot(2,3,1);imshow(I);title('原始图像');axis([50,250,50,200]);grid on; %显示网格线axis on; %显示坐标系I1=im2bw(I);subplot(2,3,2);imshow(I1);title('二值图像');axis([50,250,50,200]);grid on; %显示网格线axis on; %显示坐标系I2=edge(I1,'roberts');figure;subplot(2,3,3);imshow(I2);title('roberts算子分割结果');axis([50,250,50,200]);grid on; %显示网格线axis on; %显示坐标系I3=edge(I1,'sobel');subplot(2,3,4);imshow(I3);title('sobel算子分割结果');axis([50,250,50,200]);grid on; %显示网格线axis on; %显示坐标系I4=edge(I1,'Prewitt');subplot(2,3,5);imshow(I4);title('Prewitt算子分割结果');axis([50,250,50,200]);grid on; %显示网格线axis on; %显示坐标系9.LOG算子检测边缘用MA TLAB程序实现如下:I=imread('xian.bmp');subplot(2,2,1);imshow(I);title('原始图像');I1=rgb2gray(I);subplot(2,2,2);imshow(I1);title('灰度图像');I2=edge(I1,'log');subplot(2,2,3);imshow(I2);title('log算子分割结果');10.Canny算子检测边缘用MA TLAB程序实现如下:I=imread('xian.bmp');subplot(2,2,1);imshow(I);title('原始图像')I1=rgb2gray(I);subplot(2,2,2);imshow(I1);title('灰度图像');I2=edge(I1,'canny');subplot(2,2,3);imshow(I2);title('canny算子分割结果');11.边界跟踪(bwtraceboundary函数)clcclear allI=imread('xian.bmp');figureimshow(I);title('原始图像');I1=rgb2gray(I); %将彩色图像转化灰度图像threshold=graythresh(I1); %计算将灰度图像转化为二值图像所需的门限BW=im2bw(I1, threshold); %将灰度图像转化为二值图像figureimshow(BW);title('二值图像');dim=size(BW);col=round(dim(2)/2)-90; %计算起始点列坐标row=find(BW(:,col),1); %计算起始点行坐标connectivity=8;num_points=180;contour=bwtraceboundary(BW,[row,col],'N',connectivity,num_points);%提取边界figureimshow(I1);hold on;plot(contour(:,2),contour(:,1), 'g','LineWidth' ,2);title('边界跟踪图像');12.Hough变换I= imread('xian.bmp');rotI=rgb2gray(I);subplot(2,2,1);imshow(rotI);title('灰度图像');axis([50,250,50,200]);grid on;axis on;BW=edge(rotI,'prewitt');subplot(2,2,2);imshow(BW);title('prewitt算子边缘检测后图像');axis([50,250,50,200]);grid on;axis on;[H,T,R]=hough(BW);subplot(2,2,3);imshow(H,[],'XData',T,'YData',R,'InitialMagnification','fit');title('霍夫变换图');xlabel('\theta'),ylabel('\rho');axis on , axis normal, hold on;P=houghpeaks(H,5,'threshold',ceil(0.3*max(H(:))));x=T(P(:,2));y=R(P(:,1));plot(x,y,'s','color','white');lines=houghlines(BW,T,R,P,'FillGap',5,'MinLength',7);subplot(2,2,4);,imshow(rotI);title('霍夫变换图像检测');axis([50,250,50,200]);grid on;axis on;hold on;max_len=0;for k=1:length(lines)xy=[lines(k).point1;lines(k).point2];plot(xy(:,1),xy(:,2),'LineWidth',2,'Color','green');plot(xy(1,1),xy(1,2),'x','LineWidth',2,'Color','yellow');plot(xy(2,1),xy(2,2),'x','LineWidth',2,'Color','red');len=norm(lines(k).point1-lines(k).point2);if(len>max_len)max_len=len;xy_long=xy;endendplot(xy_long(:,1),xy_long(:,2),'LineWidth',2,'Color','cyan');13.直方图阈值法用MA TLAB实现直方图阈值法:I=imread('xian.bmp');I1=rgb2gray(I);figure;subplot(2,2,1);imshow(I1);title(' 灰度图像')axis([50,250,50,200]);grid on; %显示网格线axis on; %显示坐标系[m,n]=size(I1); %测量图像尺寸参数GP=zeros(1,256); %预创建存放灰度出现概率的向量for k=0:255GP(k+1)=length(find(I1==k))/(m*n); %计算每级灰度出现的概率,将其存入GP中相应位置endsubplot(2,2,2),bar(0:255,GP,'g') %绘制直方图title('灰度直方图')xlabel('灰度值')ylabel(' 出现概率')I2=im2bw(I,150/255);subplot(2,2,3),imshow(I2);title('阈值150的分割图像')axis([50,250,50,200]);grid on; %显示网格线axis on; %显示坐标系I3=im2bw(I,200/255); %subplot(2,2,4),imshow(I3);title('阈值200的分割图像')axis([50,250,50,200]);grid on; %显示网格线axis on; %显示坐标系14. 自动阈值法:Otsu法用MA TLAB实现Otsu算法:clcclear allI=imread('xian.bmp');subplot(1,2,1),imshow(I);title('原始图像')axis([50,250,50,200]);grid on; %显示网格线axis on; %显示坐标系level=graythresh(I); %确定灰度阈值BW=im2bw(I,level);subplot(1,2,2),imshow(BW);title('Otsu 法阈值分割图像')axis([50,250,50,200]);grid on; %显示网格线axis on; %显示坐标系15.膨胀操作I=imread('xian.bmp'); %载入图像I1=rgb2gray(I);subplot(1,2,1);imshow(I1);title('灰度图像')axis([50,250,50,200]);grid on; %显示网格线axis on; %显示坐标系se=strel('disk',1); %生成圆形结构元素I2=imdilate(I1,se); %用生成的结构元素对图像进行膨胀subplot(1,2,2);imshow(I2);title(' 膨胀后图像');axis([50,250,50,200]);grid on; %显示网格线axis on; %显示坐标系16.腐蚀操作MATLAB 实现腐蚀操作I=imread('xian.bmp'); %载入图像I1=rgb2gray(I);subplot(1,2,1);imshow(I1);title('灰度图像')axis([50,250,50,200]);grid on; %显示网格线axis on; %显示坐标系se=strel('disk',1); %生成圆形结构元素I2=imerode(I1,se); %用生成的结构元素对图像进行腐蚀subplot(1,2,2);imshow(I2);title('腐蚀后图像');axis([50,250,50,200]);grid on; %显示网格线axis on; %显示坐标系17.开启和闭合操作用MA TLAB实现开启和闭合操作I=imread('xian.bmp'); %载入图像subplot(2,2,1),imshow(I);title('原始图像');axis([50,250,50,200]);axis on; %显示坐标系I1=rgb2gray(I);subplot(2,2,2),imshow(I1);title('灰度图像');axis([50,250,50,200]);axis on; %显示坐标系se=strel('disk',1); %采用半径为1的圆作为结构元素I2=imopen(I1,se); %开启操作I3=imclose(I1,se); %闭合操作subplot(2,2,3),imshow(I2);title('开启运算后图像');axis([50,250,50,200]);axis on; %显示坐标系subplot(2,2,4),imshow(I3);title('闭合运算后图像');axis([50,250,50,200]);axis on; %显示坐标系18.开启和闭合组合操作I=imread('xian.bmp'); %载入图像subplot(3,2,1),imshow(I);title('原始图像');axis([50,250,50,200]);axis on; %显示坐标系I1=rgb2gray(I);subplot(3,2,2),imshow(I1);title('灰度图像');axis([50,250,50,200]);axis on; %显示坐标系se=strel('disk',1);I2=imopen(I1,se); %开启操作I3=imclose(I1,se); %闭合操作subplot(3,2,3),imshow(I2);title('开启运算后图像');axis([50,250,50,200]);axis on; %显示坐标系subplot(3,2,4),imshow(I3);title('闭合运算后图像');axis([50,250,50,200]);axis on; %显示坐标系se=strel('disk',1);I4=imopen(I1,se);I5=imclose(I4,se);subplot(3,2,5),imshow(I5); %开—闭运算图像title('开—闭运算图像');axis([50,250,50,200]);axis on; %显示坐标系I6=imclose(I1,se);I7=imopen(I6,se);subplot(3,2,6),imshow(I7); %闭—开运算图像title('闭—开运算图像');axis([50,250,50,200]);axis on; %显示坐标系19.形态学边界提取利用MATLAB实现如下:I=imread('xian.bmp'); %载入图像subplot(1,3,1),imshow(I);title('原始图像');axis([50,250,50,200]);grid on; %显示网格线axis on; %显示坐标系I1=im2bw(I);subplot(1,3,2),imshow(I1);title('二值化图像');axis([50,250,50,200]);grid on; %显示网格线axis on; %显示坐标系I2=bwperim(I1); %获取区域的周长subplot(1,3,3),imshow(I2);title('边界周长的二值图像');axis([50,250,50,200]);grid on;axis on;20.形态学骨架提取利用MATLAB实现如下:I=imread('xian.bmp');subplot(2,2,1),imshow(I);title('原始图像');axis([50,250,50,200]);axis on;I1=im2bw(I);subplot(2,2,2),imshow(I1);title('二值图像');axis([50,250,50,200]);axis on;I2=bwmorph(I1,'skel',1);subplot(2,2,3),imshow(I2);title('1次骨架提取');axis([50,250,50,200]);axis on;I3=bwmorph(I1,'skel',2);subplot(2,2,4),imshow(I3);title('2次骨架提取');axis([50,250,50,200]);axis on;21.直接提取四个顶点坐标I = imread('xian.bmp');I = I(:,:,1);BW=im2bw(I);figureimshow(~BW)[x,y]=getpts。
MATLAB优化工具箱

MATLAB优化工具箱MATLAB是一种广泛应用于工程、科学和数学领域的计算机语言和开发环境。
它具有许多功能强大的工具箱,其中之一就是优化工具箱。
优化是在给定的约束条件下找到一个最优解的问题,这在科学和工程中非常常见。
在本文中,我们将探讨MATLAB优化工具箱的一些重要功能和用途。
优化问题通常需要定义一个目标函数以及一些约束条件。
目标函数是需要最小化或最大化的函数,约束条件是一组等式或不等式约束,限制了解的范围。
MATLAB优化工具箱提供了各种方法来定义和求解这些问题。
在MATLAB中,可以使用优化工具箱中的函数来定义目标函数和约束条件。
例如,可以使用'fmincon'函数来求解具有等式和不等式约束条件的非线性优化问题。
该函数使用了一种称为约束优化方法的算法,可以有效地找到最优解。
除了求解优化问题之外,MATLAB优化工具箱还提供了一些评估和分析优化结果的函数。
例如,可以使用'fmincon'函数的输出来检查最终解是否满足约束条件,以及如何通过调整输入参数来改进解。
除了'fmincon'函数之外,MATLAB优化工具箱还提供了许多其他函数和算法,用于解决不同类型的优化问题。
例如,'linprog'函数用于求解线性规划问题,'quadprog'函数用于求解二次规划问题,'ga'函数用于求解遗传算法问题等等。
对于每个具体的问题,MATLAB优化工具箱都提供了相应的函数和算法来快速求解。
总而言之,MATLAB优化工具箱是一个强大而灵活的工具,可用于解决各种类型的优化问题。
它提供了一套丰富的函数和算法,使用户能够轻松地定义和求解优化问题。
无论是在工程、科学还是数学领域,MATLAB优化工具箱都可以为用户提供帮助,帮助他们找到最优解或最佳方案。
无论是学术研究还是工程应用,MATLAB优化工具箱都是一个非常有价值的工具。
matlab优化工具箱
用最优化方法解决最优化问题的技术称为最优化技术,它包含两个方面的内容:1)建立数学模型即用数学语言来描述最优化问题。
模型中的数学关系式反映了最优化问题所要达到的目标和各种约束条件。
2)数学求解数学模型建好以后,选择合理的最优化方法进行求解。
最优化方法的发展很快,现在已经包含有多个分支,如线性规划、整数规划、非线性规划、动态规划、多目标规划等。
9.1 概述利用Matlab的优化工具箱,可以求解线性规划、非线性规划和多目标规划问题。
具体而言,包括线性、非线性最小化,最大最小化,二次规划,半无限问题,线性、非线性方程(组)的求解,线性、非线性的最小二乘问题。
另外,该工具箱还提供了线性、非线性最小化,方程求解,曲线拟合,二次规划等问题中大型课题的求解方法,为优化方法在工程中的实际应用提供了更方便快捷的途径。
9.1.1 优化工具箱中的函数优化工具箱中的函数包括下面几类:1.最小化函数9.1.3 参数设置利用optimset函数,可以创建和编辑参数结构;利用optimget函数,可以获得options优化参数。
●optimget函数功能:获得options优化参数。
语法:val = optimget(options,'param')val = optimget(options,'param',default)描述:val = optimget(options,'param') 返回优化参数options中指定的参数的值。
只需要用参数开头的字母来定义参数就行了。
val = optimget(options,'param',default) 若options结构参数中没有定义指定参数,则返回缺省值。
注意,这种形式的函数主要用于其它优化函数。
举例:1.下面的命令行将显示优化参数options返回到my_options结构中:val = optimget(my_options,'Display')2.下面的命令行返回显示优化参数options到my_options结构中(就象前面的例子一样),但如果显示参数没有定义,则返回值'final':optnew = optimget(my_options,'Display','final');参见:optimset●optimset函数功能:创建或编辑优化选项参数结构。
基于阈值的图像分割

N
N
i 0
L 1
i
第i级出现的概率为:
Ni P i N
在OTSU算法中,以阈值k将所有的像素分为目标C0和背景C1两类。其 中,C0类的像素灰度级为0~k-1,C1类的像素灰度级为k~L-1。 图像的总平均灰度级为:
u iP i
i 0
L 1
C0类像素所占面积的比例为:
0 P i
(a)原图 图3-1 生成直方图
(b)直方图
3.2 最大类间方差法(OTSU)
最大类间方差法又称为OTSU算法,大津法(OTSU)是一种确定图像二 值化分割阈值的算法,由日本学者大津于1979年提出。从大津法的原理 上来讲,该方法又称作最大类间方差法,因为按照大津法求得的阈值进 行图像二值化分割后,前景与背景图像的类间方差最大。 原理: 对于图像 A(x,y),前景(即目标) 和背景的分割阈值记作 T ,属于前景 的像素点数占整幅图像的比例记为 ω 0,其平均灰度μ 0;背景像素点数 占整幅图像的比例为 ω 1,其平均灰度为μ 1。图像的总平均灰度记为 μ , 类间方差记为g。 设A是一幅具有L级灰度级的图像,其中第i级像素为 个,其中i的值 在0~L-1之间,图像的总像素点个数为:
2 2
2
2
令k从0~L-1变化,计算在不同k值下的类间方差 k 2 使得 k 最大时的那个k值就是所要求的最优阈值。
图3-2为采用OTSU方法取得最优阈值后进行阈值分割的结果。 MATLAB程序如下: I=imread('tsaml.jpg'); [width,height]=size(I); level=graythresh(I); BW=im2bw(I,level); figure imshow(BW) MATLAB 提供 graythresh 函数来自动获取分割阈值, im2bw 功能是 转换图像为二进制图像。这两个函数结合使用,graythresh函数是自适 应阈值,求出图像的自适应阈值,然后利用im2bw函数再转化为二值图像 并输出,得到如图所示的自适应阈值图。
数字图像处理教程(matlab版)
FILENAME参数指定文件名。FMT为保存文件采用的格式。 imwrite(I6,'nirdilatedisk2TTC10373.bmp');
/1、图像的读取和显示
三、图像的显示
imshow(I,[low high])
I为要显示的图像矩阵。[low high]为指定显示灰度图像的灰度范围。 高于high的像素被显示成白色;低于low的像素被显示成黑色;介于 High和low之间的像素被按比例拉伸后显示为各种等级的灰色。 figure;imshow(I6);title('The Main Pass Part of TTC10373');
t c logk s
c为尺度比例常数,s为源灰度值,t为变换后的目标灰 度值。k为常数。灰度的对数变换可以增强一幅图像 中较暗部分的细节,可用来扩展被压缩的高值图像中 的较暗像素。广泛应用于频谱图像的显示中。
Warning:log函数会对输入图像矩阵s中的每个元素进行
操作,但仅能处理double类型的矩阵。而从图像文件中得到的 图像矩阵大多是uint8类型的,故需先进行im2double数据类型 转换。
原 图 像
滤 波 后 图
像
/4、空间域图像增强 三、滤波器设计
h=fspecial(type,parameters)
parameters为可选项,是和所选定的滤波器类型type相关的 配置参数,如尺寸和标准差等。
type为滤波器的类型。其合法值如下:
合法取值 ‘average’
‘disk’ ‘gaussian’ ‘laplacian’
DA
DMax A0
DA
MATLAB图像处理函数大全(英文)
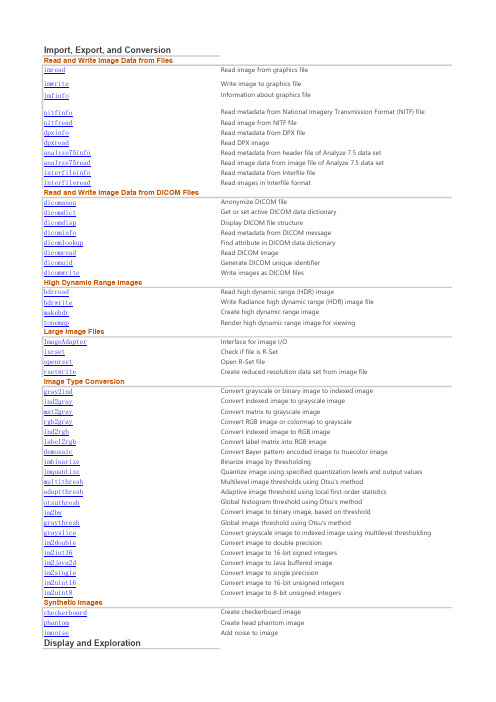
Import, Export, and ConversionRead and Write Image Data from Filesimread Read image from graphics fileimwrite Write image to graphics fileimfinfo Information about graphics filenitfinfo Read metadata from National Imagery Transmission Format (NITF) file nitfread Read image from NITF filedpxinfo Read metadata from DPX filedpxread Read DPX imageanalyze75info Read metadata from header file of Analyze 7.5 data setanalyze75read Read image data from image file of Analyze 7.5 data setinterfileinfo Read metadata from Interfile fileinterfileread Read images in Interfile formatRead and Write Image Data from DICOM Filesdicomanon Anonymize DICOM filedicomdict Get or set active DICOM data dictionarydicomdisp Display DICOM file structuredicominfo Read metadata from DICOM messagedicomlookup Find attribute in DICOM data dictionarydicomread Read DICOM imagedicomuid Generate DICOM unique identifierdicomwrite Write images as DICOM filesHigh Dynamic Range Imageshdrread Read high dynamic range (HDR) imagehdrwrite Write Radiance high dynamic range (HDR) image filemakehdr Create high dynamic range imagetonemap Render high dynamic range image for viewingLarge Image FilesImageAdapter Interface for image I/Oisrset Check if file is R-Setopenrset Open R-Set filersetwrite Create reduced resolution data set from image fileImage Type Conversiongray2ind Convert grayscale or binary image to indexed imageind2gray Convert indexed image to grayscale imagemat2gray Convert matrix to grayscale imagergb2gray Convert RGB image or colormap to grayscaleind2rgb Convert indexed image to RGB imagelabel2rgb Convert label matrix into RGB imagedemosaic Convert Bayer pattern encoded image to truecolor imageimbinarize Binarize image by thresholdingimquantize Quantize image using specified quantization levels and output values multithresh Multilevel image thresholds using Otsu's methodadaptthresh Adaptive image threshold using local first-order statisticsotsuthresh Global histogram threshold using Otsu's methodim2bw Convert image to binary image, based on thresholdgraythresh Global image threshold using Otsu's methodgrayslice Convert grayscale image to indexed image using multilevel thresholding im2double Convert image to double precisionim2int16Convert image to 16-bit signed integersim2java2d Convert image to Java buffered imageim2single Convert image to single precisionim2uint16Convert image to 16-bit unsigned integersim2uint8Convert image to 8-bit unsigned integersSynthetic Imagescheckerboard Create checkerboard imagephantom Create head phantom imageimnoise Add noise to imageDisplay and Explorationiptcheckhandle Check validity of handleiptgetapi Get Application Programmer Interface (API) for handle iptGetPointerBehavior Retrieve pointer behavior from HG objectipticondir Directories containing IPT and MATLAB iconsiptPointerManager Create pointer manager in figureiptremovecallback Delete function handle from callback listiptSetPointerBehavior Store pointer behavior structure in Handle Graphics object iptwindowalign Align figure windowsmakeConstrainToRectFcn Create rectangularly bounded drag constraint functiontruesize Adjust display size of imageGeometric Transformation, Spatial Referencing, and Image RegistrationGeometric Transformationsimcrop Crop imageimresize Resize imageimrotate Rotate imageimtranslate Translate imageimpyramid Image pyramid reduction and expansionimwarp Apply geometric transformation to imagefitgeotrans Fit geometric transformation to control point pairsimtransform Apply 2-D spatial transformation to imagefindbounds Find output bounds for spatial transformationfliptform Flip input and output roles of TFORM structuremakeresampler Create resampling structuremaketform Create spatial transformation structure (TFORM)tformarray Apply spatial transformation to N-D arraytformfwd Apply forward spatial transformationtforminv Apply inverse spatial transformationcheckerboard Create checkerboard imageaffine2d2-D Affine Geometric Transformationaffine3d3-D Affine Geometric Transformationprojective2d2-D Projective Geometric Transformationimages.geotrans.PiecewiseLinearTransformation2D2-D piecewise linear geometric transformationimages.geotrans.PolynomialTransformation2D2-D Polynomial Geometric Transformation2-D Local Weighted Mean Geometric Transformationimages.geotrans.LocalWeightedMeanTransformation2DSpatial Referencingimwarp Apply geometric transformation to imageimregister Intensity-based image registrationimregtform Estimate geometric transformation that aligns two 2-D or 3-D images imshow Display imageimshowpair Compare differences between imagesimfuse Composite of two imagesimref2d Reference 2-D image to world coordinatesimref3d Reference 3-D image to world coordinatesAutomatic Registrationimregister Intensity-based image registrationimregconfig Configurations for intensity-based registrationimregtform Estimate geometric transformation that aligns two 2-D or 3-D images imregcorr Estimates geometric transformation that aligns two 2-D images using phasecorrelationimregdemons Estimate displacement field that aligns two 2-D or 3-D imagesimfuse Composite of two imagesimshowpair Compare differences between imagesregistration.metric.MattesMutualInformation Mattes mutual information metric configuration objectregistration.metric.MeanSquares Mean square error metric configuration objectRegular step gradient descent optimizer configuration object registration.optimizer.RegularStepGradientDescentregistration.optimizer.OnePlusOneEvolutionary One-plus-one evolutionary optimizer configuration objectControl Point Registrationcpselect Control Point Selection Toolfitgeotrans Fit geometric transformation to control point pairscpcorr Tune control-point locations using cross correlationcpstruct2pairs Convert CPSTRUCT to valid pairs of control pointsnormxcorr2Normalized 2-D cross-correlationcp2tform Infer spatial transformation from control point pairsImage EnhancementContrast Adjustmentimadjust Adjust image intensity values or colormapimcontrast Adjust Contrast toolimsharpen Sharpen image using unsharp maskinghisteq Enhance contrast using histogram equalizationadapthisteq Contrast-limited adaptive histogram equalization (CLAHE)imhistmatch Adjust histogram of image to match N-bin histogram of reference image decorrstretch Apply decorrelation stretch to multichannel imagestretchlim Find limits to contrast stretch imageintlut Convert integer values using lookup tableimnoise Add noise to imageImage Filteringimfilter N-D filtering of multidimensional imagesimgaussfilt2-D Gaussian filtering of imagesimgaussfilt33-D Gaussian filtering of 3-D imagesfspecial Create predefined 2-D filterimguidedfilter Guided filtering of imagesnormxcorr2Normalized 2-D cross-correlationwiener22-D adaptive noise-removal filteringmedfilt22-D median filteringordfilt22-D order-statistic filteringstdfilt Local standard deviation of imagerangefilt Local range of imageentropyfilt Local entropy of grayscale imagenlfilter General sliding-neighborhood operationsgabor Create Gabor filter or Gabor filter bankimgaborfilt Apply Gabor filter or set of filters to 2-D imageimboxfilt2-D box filtering of imagesimboxfilt33-D box filtering of 3-D imagesintegralImage Calculate integral imageintegralImage3Calculate 3-D integral imageintegralBoxFilter2-D box filtering of integral imagesintegralBoxFilter33-D box filtering of 3-D integral imagesbwareafilt Extract objects from binary image by sizebwpropfilt Extract objects from binary image using propertiespadarray Pad arrayfreqz22-D frequency responsefsamp22-D FIR filter using frequency samplingftrans22-D FIR filter using frequency transformationfwind12-D FIR filter using 1-D window methodfwind22-D FIR filter using 2-D window methodconvmtx22-D convolution matrixMorphological Operationsbwhitmiss Binary hit-miss operationbwmorph Morphological operations on binary imagesbwulterode Ultimate erosionbwareaopen Remove small objects from binary imageimbothat Bottom-hat filteringimclearborder Suppress light structures connected to image borderimclose Morphologically close imageimdilate Dilate imageimerode Erode imageimextendedmax Extended-maxima transformimextendedmin Extended-minima transformimfill Fill image regions and holesbwunpack Unpack binary imageconndef Create connectivity arraydemosaic Convert Bayer pattern encoded image to truecolor imageedge Find edges in intensity imagefitgeotrans Fit geometric transformation to control point pairsfspecial Create predefined 2-D filtergetrangefromclass Default display range of image based on its classgrayconnected Select contiguous image region with similar gray valueshisteq Enhance contrast using histogram equalizationhough Hough transformhoughlines Extract line segments based on Hough transformhoughpeaks Identify peaks in Hough transformhsv2rgb Convert HSV colormap to RGB colormapim2double Convert image to double precisionim2int16Convert image to 16-bit signed integersim2single Convert image to single precisionim2uint16Convert image to 16-bit unsigned integersim2uint8Convert image to 8-bit unsigned integersimabsdiff Absolute difference of two imagesimadjust Adjust image intensity values or colormapimbinarize Binarize image by thresholdingimbothat Bottom-hat filteringimboxfilt2-D box filtering of imagesimclearborder Suppress light structures connected to image borderimclose Morphologically close imageimcomplement Complement imageimcrop Crop imageimdilate Dilate imageimerode Erode imageimextendedmax Extended-maxima transformimextendedmin Extended-minima transformimfill Fill image regions and holesimfilter N-D filtering of multidimensional imagesimfindcircles Find circles using circular Hough transformimgaborfilt Apply Gabor filter or set of filters to 2-D imageimgaussfilt2-D Gaussian filtering of imagesimgradient3Find 3-D gradient magnitude and direction of images imgradientxyz Find the directional gradients of a 3-D imageimhist Histogram of image dataimhmax H-maxima transformimhmin H-minima transformimlincomb Linear combination of imagesimmse Mean-squared errorimopen Morphologically open imageimoverlay Burn binary mask into 2-D imageimpyramid Image pyramid reduction and expansionimquantize Quantize image using specified quantization levels and output values imread Read image from graphics fileimreconstruct Morphological reconstructionimregionalmax Regional maximaimregionalmin Regional minimaimresize Resize imageimrotate Rotate imageimtophat Top-hat filteringimtranslate Translate imageimwarp Apply geometric transformation to imageintegralBoxFilter2-D box filtering of integral imagesintegralImage Calculate integral imageintlut Convert integer values using lookup tableiptcheckmap Check validity of colormapiradon Inverse Radon transformmat2gray Convert matrix to grayscale imagemean2Average or mean of matrix elementsmedfilt22-D median filteringnormxcorr2Normalized 2-D cross-correlationpadarray Pad arrayradon Radon transformregionprops Measure properties of image regionsrgb2gray Convert RGB image or colormap to grayscale rgb2ycbcr Convert RGB color values to YCbCr color space std2Standard deviation of matrix elementsstdfilt Local standard deviation of imagestretchlim Find limits to contrast stretch image。
MATLAB优化工具箱ppt

要点三
问题求解
整数规划问题通常比较复杂,需要利 用专门的整数规划函数进行求解,通 过定义问题的目标函数和约束条件, 选择适合的整数规划函数可以求解不 同场景下的整数规划问题。
05
使用matlab优化工具箱的注意事项
选择合适的求解器
线性规划
使用`linprog`函数求解线性规 划问题,可以选择内置的单纯 形法或者内点法等求解器。
适用场景
适用于制造业、物流业、服务业等 行业的生产计划、调度和资源配置 问题。
投资组合优化问题
总结词
在风险和收益之间寻求平衡,构建最优投资组合,以最大化投资回报并控制风险。
详细描述
通过使用matlab优化工具箱,可以建立投资组合优化模型。首先定义投资组合中的资产及其权重、收益和风险等参数,然 后构建合适的数学模型并使用求解器求解最优解。
专业性强
优化工具箱采用了先进的优化算 法和数学模型,能够针对不同类 型的问题进行优化。
易用性高
使用简单的操作界面,可以方便地 设置和执行优化任务。
常见优化问题的求解方法
非线性规划
用于解决非线性优化问题,如 最优化投资组合、生产成本最 小化等。
整数规划
用于解决决策变量为整数的问 题,如车辆路径问题、排班计 划等。
区别不同模块之间也存在区别,如算法模块中的不同算法 适用于不同的优化问题,使用者需要根据自己的需求选择 合适的算法;而应用模块中不同的应用领域也需要使用者 根据实际情况进行选择和调整。
03
求解优化问题
求解优化问题的基本步骤
确定优化目标和变量
明确优化问题的目标函数和决策变量。
分析结果
根据优化结果,分析目标函数的最优解和 变量的最优值。
MATLAB深度学习工具箱教程

MATLAB深度学习工具箱教程第一章:MATLAB深度学习工具箱概述MATLAB深度学习工具箱是MathWorks公司开发的一套用于深度学习任务的工具。
它提供了丰富的函数和算法,可以帮助用户在MATLAB环境下进行深度学习模型的设计、训练和推理。
本章将介绍MATLAB深度学习工具箱的主要功能和应用领域。
首先,MATLAB深度学习工具箱提供了丰富的预训练模型。
这些模型已经在大规模数据集上进行了训练,并在各种视觉、语音和文本任务中取得了良好的性能。
用户可以直接使用这些预训练模型,从而节省了大量的训练时间和计算资源。
其次,MATLAB深度学习工具箱还支持自定义模型的设计和训练。
用户可以根据自己的任务需求,使用MATLAB提供的高级API来构建复杂的深度学习模型,包括卷积神经网络、循环神经网络和生成对抗网络等。
同时,工具箱还提供了丰富的训练算法和优化器,可以帮助用户有效地训练模型并提高模型的性能。
第二章:MATLAB深度学习工具箱的应用领域MATLAB深度学习工具箱具有广泛的应用领域,包括图像处理、计算机视觉、语音识别、自然语言处理等。
本章将以计算机视觉为例,介绍MATLAB深度学习工具箱在图像分类、目标检测和图像生成等任务中的应用。
首先,MATLAB深度学习工具箱可以用于图像分类任务。
用户可以使用预训练模型,将输入图像的特征提取和分类过程简化为一步操作。
此外,用户还可以通过微调预训练模型,提高其在特定任务上的性能。
工具箱提供了一系列评估指标,可以帮助用户评估模型在测试集上的性能。
其次,MATLAB深度学习工具箱还可以用于目标检测任务。
用户可以使用预训练的目标检测模型,将输入图像中的目标位置和类别信息提取出来。
工具箱提供了多种目标检测算法,包括基于区域建议的方法和单阶段方法,可以根据任务需求选择合适的算法。
第三章:MATLAB深度学习工具箱的基本操作在使用MATLAB深度学习工具箱进行深度学习任务之前,用户需要了解一些基本的操作。
matlab otsu算法

matlab otsu算法什么是Otsu算法?Otsu算法,也被称为最大类间方差法,是一种常用于图像处理和计算机视觉中的图像二值化方法。
该算法是由日本学者大津秀一在1979年提出的。
Otsu算法的主要目标是将图像转化为黑白二值图像,以便进行后续的图像分割和特征提取等操作。
其基本原理是在图像中寻找一个最佳的阈值,将图像的像素点分成两个互补的类别,使得两个类别之间的方差最大化。
如何实现Otsu算法?步骤1:计算灰度直方图首先,我们需要计算图像的灰度直方图。
灰度直方图是一种统计图,用于显示图像中各个灰度级别的像素点的分布情况。
在MATLAB中,我们可以使用imhist函数来计算灰度直方图。
步骤2:计算类间方差接下来,我们需要计算图像的类间方差。
类间方差是指图像中不同类别(即黑色和白色)之间的方差。
在Otsu算法中,我们要找到一个最佳的阈值,使得将图像分为两个类别时,类间方差最大化。
计算类间方差的公式为:\[\sigma^2_w(t) = \omega_1(t)\omega_2(t)[\mu_1(t)-\mu_2(t)]^2\]其中,\(\sigma^2_w(t)\)表示在阈值t处的类间方差,\(\omega_1(t)\)和\(\omega_2(t)\)表示在阈值t处两个类别的像素点比例,\(\mu_1(t)\)和\(\mu_2(t)\)表示在阈值t处两个类别的平均灰度值。
步骤3:寻找最佳阈值在这一步中,我们通过遍历不同的阈值,找到一个使类间方差最大化的阈值。
具体的实现方法如下:1. 根据步骤2中的类间方差公式,计算每个阈值下的类间方差值。
2. 找到类间方差最大的阈值,这个阈值即为最佳阈值。
步骤4:二值化图像最后,我们使用最佳阈值来将图像进行二值化处理。
二值化即将图像中的像素点分为只有黑色和白色两种颜色的情况。
根据最佳阈值,大于阈值的像素点被赋值为白色,小于等于阈值的像素点被赋值为黑色。
在MATLAB中,可以使用下列代码执行Otsu算法:matlab读取图像img = imread('image.jpg');将图像转化为灰度图像gray_img = rgb2gray(img);计算灰度直方图histogram = imhist(gray_img);计算类间方差class_variances = zeros(256, 1);for t = 1:256计算每个阈值下的类间方差omega1 = sum(histogram(1:t)) / numel(gray_img);omega2 = sum(histogram(t+1:end)) / numel(gray_img);mu1 = sum((0:t-1)' .* histogram(1:t)) / sum(histogram(1:t));mu2 = sum((t:255)' .* histogram(t+1:end)) /sum(histogram(t+1:end));class_variances(t) = omega1 * omega2 * (mu1 - mu2)^2;end找到最佳阈值[~, threshold] = max(class_variances);二值化图像binary_img = gray_img > threshold;显示二值化图像imshow(binary_img);总结:Otsu算法是一种常用的图像二值化方法,它能够通过寻找最佳的阈值,将图像转化为黑白二值图像。
otsu阈值处理matlab
文章标题:探索Otsu阈值处理在Matlab中的应用一、引言Otsu阈值处理是一种图像分割方法,旨在寻找最佳的阈值,以将图像分成两个部分:背景和对象。
在Matlab中,Otsu阈值处理有着广泛的应用,通过自动计算最佳阈值来实现图像分割。
在本文中,我们将深入探讨Otsu阈值处理在Matlab中的原理、应用和优缺点,以帮助读者更好地理解这一概念。
二、Otsu阈值处理的原理Otsu阈值处理的核心思想是寻找一个阈值,使得在该阈值下背景和对象的类内方差最小,类间方差最大。
具体而言,在图像直方图中,通过计算每个灰度级别的像素在整个图像中的概率分布,以及对应的灰度级别的类内方差和类间方差,最终得出最佳阈值。
在Matlab中,可以通过内置的otsuthresh函数来实现Otsu阈值的计算。
三、Otsu阈值处理的应用Otsu阈值处理在Matlab中广泛应用于图像分割、目标检测、医学图像处理等领域。
通过Otsu阈值处理,可以有效地将图像分成背景和对象两部分,为后续的图像处理和分析提供了基础。
在Matlab中,通过imbinarize函数可以直接调用Otsu阈值处理来实现图像的二值化。
四、Otsu阈值处理的优缺点Otsu阈值处理的优点在于对图像的自适应性强,能够根据图像的特性自动计算最佳阈值,无需人工干预。
Otsu阈值处理能够有效地区分目标和背景,适用于复杂的图像场景。
然而,Otsu阈值处理也存在一些缺点,例如对噪声敏感、对弱对比度图像效果不佳等。
五、个人观点与理解在我看来,Otsu阈值处理是一种非常有效的图像分割方法,在Matlab中的应用也为图像处理的自动化和智能化提供了重要支持。
然而,在实际应用中,我们也需要考虑到Otsu阈值处理的局限性,并结合具体的图像特点选择合适的算法和参数,以达到最佳的图像分割效果。
六、总结与回顾通过本文的阐述,我们对Otsu阈值处理在Matlab中的原理、应用和优缺点有了更清晰的认识。
matlab 自适应阈值函数
matlab 自适应阈值函数全文共四篇示例,供读者参考第一篇示例:MATLAB是一种非常流行的科学计算软件,广泛应用于工程、物理、生物、金融等领域。
自适应阈值函数是图像处理领域一项重要的功能,可以帮助我们在处理图像时更加精确地提取我们需要的信息。
在本文中,我们将深入探讨MATLAB中的自适应阈值函数,以及如何在实际应用中灵活使用它来处理各类图像。
自适应阈值函数在图像处理中的作用是什么?我们需要了解图像处理中阈值的概念。
阈值处理是指将图像中的像素值与一个特定的数值进行比较,从而实现对图像的二值化处理。
而自适应阈值处理则是根据图像的局部特性动态地调整阈值,从而使得图像的二值化效果更加精确和准确。
MATLAB中自适应阈值函数通常是通过调用imbinarize函数实现的。
该函数的调用格式为imbinarize(I,method,param1,param2,...),其中I为输入的图像,method表示所使用的自适应阈值方法,而param1、param2等为各种方法的参数。
常见的自适应阈值方法包括Sauvola、Niblack、Otsu等。
以Sauvola算法为例,该算法在处理图像时结合了图像的均值和标准差,以自适应地调整阈值。
调用imbinarize函数时,需要将method参数设置为'Sauvola',并可以通过传入其他参数来调整算法的参数。
这样,我们就可以得到一张使用Sauvola算法进行自适应阈值处理的图像。
在实际应用中,如何灵活使用MATLAB的自适应阈值函数呢?我们需要根据具体的图像特点选择合适的自适应阈值算法。
对于光照不均匀的图像可以选择Sauvola算法,而对于二值化效果要求较高的图像可以选择Otsu算法。
我们还可以通过调整算法的参数来进一步优化二值化效果。
在实际应用中,我们还可以将自适应阈值函数与其他图像处理函数结合使用,以满足特定的处理需求。
第二篇示例:MATLAB是一款非常流行的科学计算软件,广泛应用于工程、科学、医学领域等各个领域。
MATLAB_OTSU
MATLAB_OTSUfunction ostuimg = imread('Lena.jpg');I_gray=rgb2gray(img);figure,imshow(I_gray);I_double=double(I_gray); %转化为双精度,因为大多数的函数和操作都是基于double的%figure,imshow(I_double);[wid,len]=size(I_gray); %wid为行数,len为列数colorlevel=256; %灰度级hist=zeros(colorlevel,1); %直方图,256×1的0矩阵%threshold=128; %初始阈值%计算直方图,统计灰度值的个数for i=1:widfor j=1:lenm=I_gray(i,j)+1; %因为灰度为0-255所以+1hist(m)=hist(m)+1;endend%直方图归一化hist=hist/(wid*len);%miuT为总的平均灰度,hist[m]代表像素值为m的点个数miuT=0;for m=1:colorlevelmiuT=miuT+(m-1)*hist(m);endxigmaB2=0; %用于保存每次计算的方差,与下次计算的方差比较大小for mindex=1:colorlevelthreshold=mindex-1;omega1=0; %前景点所占比例omega2=0; %背景点所占比例for m=1:threshold-1omega1=omega1+hist(m); %计算前景比例endomega2=1-omega1; %计算背景比例miu1=0; %前景平均灰度比例miu2=0; %背景平均灰度比例%计算前景与背景平均灰度for m=1:colorlevelif mmiu1=miu1+(m-1)*hist(m); %前景平均灰度elsemiu2=miu2+(m-1)*hist(m); %背景平均灰度endend% miu1=miu1/omega1;% miu2=miu2/omega2;%计算前景与背景图像的方差xigmaB21=omega1*(miu1-miuT)^2+omega2*(miu2-miuT)^2; xigma(mindex)=xigmaB21; %保留每次计算的方差%每次计算方差后,与上一次计算的方差比较。
OTSU算法学习OTSU公式证明

OTSU算法学习OTSU公式证明OTSU算法学习 OTSU公式证明1 otsu的公式如下,如果当前阈值为t,w0 前景点所占⽐例w1 = 1- w0 背景点所占⽐例u0 = 前景灰度均值u1 = 背景灰度均值u = w0*u0 + w1*u1 全局灰度均值g = w0(u0-u)*(u0-u) + w1(u1-u)*(u1-u) = w0*(1 – w0)*(u0 - u1)* (u0 - u1)⽬标函数为g, g越⼤,t就是越好的阈值.为什么采⽤这个函数作为判别依据,直观是这个函数反映了前景和背景的差值.差值越⼤,阈值越好.下⾯是⼀段证明g的推导的matlab代码syms w0 u0 u1 %w0 前景均值 u0 前景灰度均值 u1 背景灰度均值%背景均值w1 =1- w0;%全局灰度均值u=w0*u0+w1*u1;%⽬标函数g=w0*(u0-u)*(u0-u)+w1*(u1-u)*(u1-u);%化简的形式g1 =w0*w1*(u0-u1)*(u0-u1);%因式展开a1 = expand(g)%结果是 - u0^2*w0^2 + u0^2*w0 + 2*u0*u1*w0^2 - 2*u0*u1*w0 - u1^2*w0^2 + u1^2*w0a2 = expand(g)%结果是 - u0^2*w0^2 + u0^2*w0 + 2*u0*u1*w0^2 - 2*u0*u1*w0 - u1^2*w0^2 + u1^2*w0%对g进⾏因式分解a2 = factor(g)%结果 -w0*(u0 - u1)^2*(w0 - 1)这⾥是matlab初等代数运算的讲解2 关于最⼤类间⽅差法(otsu)的性能:类间⽅差法对噪⾳和⽬标⼤⼩⼗分敏感,它仅对类间⽅差为单峰的图像产⽣较好的分割效果。
当⽬标与背景的⼤⼩⽐例悬殊时,类间⽅差准则函数可能呈现双峰或多峰,此时效果不好,但是类间⽅差法是⽤时最少的。
3 代码实现public int GetThreshValue(Bitmap image){BitmapData bd = image.LockBits(new Rectangle(0,0, image.Width, image.Height), ImageLockMode.WriteOnly,image.PixelFormat);byte* pt =(byte*)bd.Scan0;int[] pixelNum = new int[256];//图象直⽅图,共256个点byte color;byte* pline;int n, n1, n2;int total;//total为总和,累计值double m1, m2, sum, csum, fmax, sb;//sb为类间⽅差,fmax存储最⼤⽅差值int k, t, q;int threshValue =1;// 阈值int step =1;switch(image.PixelFormat){case PixelFormat.Format24bppRgb:step =3;break;case PixelFormat.Format32bppArgb:step =4;break;case PixelFormat.Format8bppIndexed:step =1;break;}//⽣成直⽅图pline = pt + i * bd.Stride;for(int j =0; j < image.Width; j++){color =*(pline + j * step);//返回各个点的颜⾊,以RGB表⽰pixelNum[color]++;//相应的直⽅图加1}}//直⽅图平滑化for(k =0; k <=255; k++){total =0;for(t =-2; t <=2; t++)//与附近2个灰度做平滑化,t值应取较⼩的值{q = k + t;if(q <0)//越界处理q =0;if(q >255)q =255;total = total + pixelNum[q];//total为总和,累计值}//平滑化,左边2个+中间1个+右边2个灰度,共5个,所以总和除以5,后⾯加0.5是⽤修正值pixelNum[k]=(int)((float)total /5.0+0.5);}//求阈值sum = csum =0.0;n =0;//计算总的图象的点数和质量矩,为后⾯的计算做准备for(k =0; k <=255; k++){//x*f(x)质量矩,也就是每个灰度的值乘以其点数(归⼀化后为概率),sum为其总和sum +=(double)k *(double)pixelNum[k];n += pixelNum[k];//n为图象总的点数,归⼀化后就是累积概率}fmax =-1.0;//类间⽅差sb不可能为负,所以fmax初始值为-1不影响计算的进⾏n1 =0;for(k =0; k <255; k++)//对每个灰度(从0到255)计算⼀次分割后的类间⽅差sb{n1 += pixelNum[k];//n1为在当前阈值遍前景图象的点数if(n1 ==0){continue;}//没有分出前景后景n2 = n - n1;//n2为背景图象的点数//n2为0表⽰全部都是后景图象,与n1=0情况类似,之后的遍历不可能使前景点数增加,所以此时可以退出循环if(n2 ==0){break;}csum +=(double)k * pixelNum[k];//前景的“灰度的值*其点数”的总和m1 = csum / n1;//m1为前景的平均灰度m2 =(sum - csum)/ n2;//m2为背景的平均灰度sb =(double)n1 *(double)n2 *(m1 - m2)*(m1 - m2);//sb为类间⽅差if(sb > fmax)//如果算出的类间⽅差⼤于前⼀次算出的类间⽅差{fmax = sb;//fmax始终为最⼤类间⽅差(otsu)threshValue = k;//取最⼤类间⽅差时对应的灰度的k就是最佳阈值}}image.UnlockBits(bd);image.Dispose();return threshValue;}参考了这篇⽂章4 ⼆维otsu算法下图是⼆维otsu的⽴体图,是对右边的A进⾏⼆维直⽅图统计得到的图像, 遍历区域为5*5.这是对应的matlab代码%统计⼆维直⽅图 i 当前点的亮度 j n*n邻域均值亮度function hist2 = hist2Function(image, n)%初始化255*2565矩阵hist2 = zeros(255,255);[height, width]= size(image);for i =1:heightfor j =1:widthdata = image(i,j);tempSum =0.0;for l =-n:1:nfor m =-n:1:nx = i + l;y = j+m;if x <1x =1;elseif x > widthx = width;endif y <1y =1;elseif y > heighty = height;endtempSum = tempSum + double(image(y,x));endendtempSum = tempSum /((2*n+1)*(2*n+1));hist2(data,floor(tempSum))= hist2(data,floor(tempSum))+1;endend%加载图像imagea = imread('a.bmp');%显⽰图像%imshow(imagea);%显⽰直⽅图%figure;imhist(imagea);%计算⼆维直⽅图hist2 = hist2Function(imagea,2);%显⽰⼆维直⽅图[x,y]=meshgrid(1:1:255);mesh(x,y,hist2)<灰度图象的⼆维Otsu⾃动阈值分割法.pdf> 这篇⽂章讲解的不错.⽂章这⾥有下载下⾯⽤数学语⾔表达⼀下i :表⽰亮度的维度j : 表⽰点区域均值的维度w0: 表⽰在阈值(s,t)时所占的⽐例w1: 表⽰在阈值(s,t)时, 所占的⽐例u0(u0i, u0j): 表⽰在阈值(s,t)时时的均值.u0时2维的u1(u1i, u1j): 表⽰在阈值(s,t)时的均值.u1时2维的uT: 全局均值和⼀维otsut函数类似的⽬标函数sb = w0(u0-uT)*(u0-uT)’ + w1(u1-uT)*(u1-uT)’= w0[(u0i-uTi)* (u0i-uTi) + (u0j-uTj)* (u0j-uTj)] + w1[(u1i-uTi)* (u1i-uTi) + (u1j-uTj)* (u1j-uTj)]这⾥是代码实现.出⾃这篇⽂章:int histogram[256][256];double p_histogram[256][256];double Pst_0[256][256];//Pst_0⽤来存储概率分布情况double Xst_0[256][256];//存储x⽅向上的均值⽮量int OTSU2d(IplImage * src){int height = src->height;int width = src->width;long pixel = height * width;int i,j;for(i =0;i <256;i++)//初始化直⽅图for(j =0; j <256;j++)histogram[i][j]=0;}IplImage * temp = cvCreateImage(cvGetSize(src),8,1);cvSmooth(src,temp,CV_BLUR,3,0);for(i =0;i < height;i++)//计算直⽅图{for(j =0; j < width;j++){int data1 = cvGetReal2D(src,i,j);int data2 = cvGetReal2D(temp,i,j);histogram[data1][data2]++;}}for(i =0; i <256;i++)//直⽅图归⼀化for(j =0; j <256;j++)p_histogram[i][j]=(histogram[i][j]*1.0)/(pixel*1.0);Pst_0[0][0]= p_histogram[0][0];for(i =0;i <256;i++)//计算概率分布情况for(j =0;j <256;j++){double temp =0.0;if(i-1>=0)temp = temp + Pst_0[i-1][j];if(j-1>=0)temp = temp + Pst_0[i][j-1];if(i-1>=0&& j-1>=0)temp = temp - Pst_0[i-1][j-1];temp = temp + p_histogram[i][j];Pst_0[i][j]= temp;}Xst_0[0][0]=0* Pst_0[0][0];for(i =0; i <256;i++)//计算x⽅向上的均值⽮量for(j =0; j <256;j++){double temp =0.0;if(i-1>=0)temp = temp + Xst_0[i-1][j];if(j-1>=0)temp = temp + Xst_0[i][j-1];if(i-1>=0&& j-1>=0)temp = temp - Xst_0[i-1][j-1];temp = temp + i * p_histogram[i][j];Xst_0[i][j]= temp;}double Yst_0[256][256];//存储y⽅向上的均值⽮量Yst_0[0][0]=0* Pst_0[0][0];for(i =0; i <256;i++)//计算y⽅向上的均值⽮量for(j =0; j <256;j++){double temp =0.0;if(i-1>=0)temp = temp + Yst_0[i-1][j];if(j-1>=0)temp = temp + Yst_0[i][j-1];if(i-1>=0&& j-1>=0)temp = temp - Yst_0[i-1][j-1];temp = temp + j * p_histogram[i][j];Yst_0[i][j]= temp;}int threshold1;int threshold2;double variance =0.0;double maxvariance =0.0;for(i =0;i <256;i++)//计算类间离散测度for(j =0;j <256;j++){longdouble p0 = Pst_0[i][j];longdouble v0 = pow(((Xst_0[i][j]/p0)-Xst_0[255][255]),2)+ pow(((Yst_0[i][j]/p0)-Yst_0[255][255]),2);longdouble p1 = Pst_0[255][255]-Pst_0[255][j]-Pst_0[i][255]+Pst_0[i][j];longdouble vi = Xst_0[255][255]-Xst_0[255][j]-Xst_0[i][255]+Xst_0[i][j];longdouble vj = Yst_0[255][255]-Yst_0[255][j]-Yst_0[i][255]+Yst_0[i][j];longdouble v1 = pow(((vi/p1)-Xst_0[255][255]),2)+pow(((vj/p1)-Yst_0[255][255]),2);variance = p0*v0+p1*v1;if(variance > maxvariance){maxvariance = variance;threshold1 = i;threshold2 = j;}}//printf("%d %d",threshold1,threshold2);return(threshold1+threshold2)/2;}总结: ⼆维otsu算法得到⼀个阈值,然后对图像做⼆值化.仍然不能解决光照不均匀⼆值化的问题.⽐⼀维otsu效果好⼀些,但不是很明显.这个算法的亮点在于考虑的点的附近区域的均值.。
Otsu传统算法和快速算法的matlab实现
说明:每个%%都表示一个模块,每个模块可以单独执行,也可以将%%去掉整体执行。
将读入图像修改成自己机子上的,Otsu传统算法执行顺序如下:cell1-cell2-cell3,Otsu快速迭代算法执行顺序如下:cell1-cell2-cell4。
%%%%%%%%%%%%%%%%%%%%%%%%%%%% cell1 读入图像1I=imread('e:/photo/m/rice.png');%% cell2显示原图及其直方图subplot(2,2,1);imshow(I);xlabel('a,原图');subplot(2,2,2);imhist(I);%% cell3Otsu法传统算法的参数说明及步骤%参数说明:%M,N---图像大小%TT,T-----阈值,使得方差为最大的阈值%Ib,Ibav,Ibavm----背景图像,背景图像的灰度平均值,合适阈值时对应的背景图像的灰度平均值%If,Ifav,Ifavm----前景图像,前景图像的灰度平均值,合适阈值时对应的前景图像的灰度平均值%Iav----图像的平均灰度值(数学期望)%Ivar,Ivarm----方差,值最大的方差%%%%%%%%%%%步骤:%1.阈值T从图像的最小灰度值开始遍历,直到最大灰度值。
%2.划分前景和后景:所有I>=T的为背景Ib,得出背景所占比例pb与背景的平均灰度值Ibav;%2.划分前景和后景:所有I<T的为前景If,得出前景所占比例pf与前景的平均灰度值Ifav;%3.求出图像的平均灰度Iav和方差Ivar%4.遍历结束后,Tm即为所求,然后二值化分割。
%%%%%%%%%%%%%%%%%%%%%%[M,N]=size(I);Ivarm=0;T=0;Iav=mean(mean(I));tic;for TT=min(min(I)):max(max(I))%划分前景背景Ib=I(I>=TT);pb=length(Ib)/(M*N);Ibav=mean(Ib);If=I(I<TT);pf=length(If)/(M*N);Ifav=mean(If);%求类间方差,并找出最大方差Ivar=pb*pf*(Ibav-Ifav)^2 %lvar=pb*(Ibav-Iav)^2+pf*(Ifav-Iav)^2; if Ivar>IvarmIvarm=Ivar;T=TT;endendtoc;% 输出disp(strcat('大律法计算出的阈值: ',num2str(T)));Iotsu=im2bw(I,double(T)/255);subplot(2,2,2);imshow(Iotsu,[]);xlabel('b,大律法'); %%%%%%%%%%%%%%%%%%%%%%%%%% cel4 OTSU传统算法的快速实现----迭代%参数说明:%M,N---图像大小%T-----阈值(即使得方差为最大的阈值)%gmin,gmax---图像灰度级最小值和最大值%p---图像灰度级概率分布,一维数组长度gmin*gmax%Ibp,Ibav,Ibavm----背景图像灰度级概率,背景图像的灰度平均值,合适阈值时对应的背景图像的灰度平均值%Ifp,Ifav,Ifavm----前景图像灰度级概率,前景图像的灰度平均值,合适阈值时对应的前景图像的灰度平均值%Iav----图像的平均灰度值(数学期望)%Ivar,Ivarm----方差,值最大的方差%%%%%%%%%%%步骤:%1.先求解gmin,gmax,p,Iav,并令Ibp=0,Ibav=0,Ivarm=0;%2.i从gmin+1到gmax+1迭代搜索,(下面为方便说明,使用了序列)Ibp(i)=Ibp(i-1)+p(i),Ibav(i)=(Ibp(i-1)*Ibav(i-1)+i*p(i))/Ibp(i),Ivar(i)=(Ibp(i)*(Iav-Ibav(i))^2)/(1-Ibp(i));%2.判断Iavm是否大于Iav,若是,则i=i+1,重复第2步;若否,则Iavm=Iav,T=i,Ibavm=Ibav,Ifavm=Ifav,i=i+1,重复第2步;%3.迭代结束,T即为所求,二值化分割。
matlab otsu算法 -回复
matlab otsu算法-回复“Otsu算法”是一种常用于图像分割的算法,它通过自动确定灰度图像的阈值,将图像分为背景和前景两部分。
Otsu算法由日本学者大津展之于1979年提出,已经成为图像处理领域中的经典算法之一。
下面我将逐步介绍Otsu算法的原理和步骤,以及如何在Matlab中实现。
首先,让我们来了解一下图像分割的概念。
图像分割是指将图像划分为若干个具有独立语义或纹理特征的区域。
在实际应用中,图像分割常常是图像处理的前置步骤,用于提取出感兴趣的目标区域,进一步进行图像识别、分析和理解等操作。
Otsu算法基于灰度直方图的统计特性,通过寻找使得目标物体和背景物体之间的类间方差最大的阈值来进行图像分割。
在具体实现中,可以按照以下步骤进行:步骤一:计算灰度直方图首先,将图像转换为灰度图像,并统计每个像素值的出现频率,生成灰度直方图。
在Matlab中,可以使用imhist函数来计算灰度直方图。
步骤二:计算灰度直方图的归一化频率将灰度直方图中每个像素值的频率除以图像总像素数,得到归一化频率。
这一步的目的是将频率转化为概率。
步骤三:计算灰度直方图的累积概率计算归一化频率的累积概率,即累计每个像素值的概率值。
在Matlab中,可以使用cumsum函数来计算累积概率。
步骤四:计算类内方差和类间方差通过遍历每个可能的阈值,计算每个阈值下的类内方差和类间方差。
类内方差衡量的是同一类别内的像素灰度值差异,而类间方差衡量的则是不同类别间的像素灰度值差异。
在Matlab中,可以根据归一化频率和累积概率来计算。
步骤五:确定最佳阈值通过比较每个阈值下的类内方差和类间方差,选择使得类间方差最大的阈值作为最佳阈值。
通常情况下,类间方差最大的阈值对应的像素灰度值就是图像分割后的阈值。
步骤六:应用阈值进行图像分割将最佳阈值应用到原始灰度图像中,将图像分为背景和前景两部分。
在Matlab中,可以使用imbinarize函数将灰度图像转换为二值图像。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
function ostu
img = imread('Lena.jpg');
I_gray=rgb2gray(img);
figure,imshow(I_gray);
I_double=double(I_gray); %转化为双精度,因为大多数的函数和操作都是基于double的
%figure,imshow(I_double);
[wid,len]=size(I_gray); %wid为行数,len为列数colorlevel=256; %灰度级
hist=zeros(colorlevel,1); %直方图,256×1的0矩阵
%threshold=128; %初始阈值
%计算直方图,统计灰度值的个数
for i=1:wid
for j=1:len
m=I_gray(i,j)+1; %因为灰度为0-255所以+1
hist(m)=hist(m)+1;
end
end
%直方图归一化
hist=hist/(wid*len);
%miuT为总的平均灰度,hist[m]代表像素值为m的点个数miuT=0;
for m=1:colorlevel
miuT=miuT+(m-1)*hist(m);
end
xigmaB2=0; %用于保存每次计算的方差,与下次计算的方差比较大小
for mindex=1:colorlevel
threshold=mindex-1;
omega1=0; %前景点所占比例
omega2=0; %背景点所占比例
for m=1:threshold-1
omega1=omega1+hist(m); %计算前景比例
end
omega2=1-omega1; %计算背景比例
miu1=0; %前景平均灰度比例
miu2=0; %背景平均灰度比例
%计算前景与背景平均灰度
for m=1:colorlevel
if m
miu1=miu1+(m-1)*hist(m); %前景平均灰度
else
miu2=miu2+(m-1)*hist(m); %背景平均灰度
end
end
% miu1=miu1/omega1;
% miu2=miu2/omega2;
%计算前景与背景图像的方差
xigmaB21=omega1*(miu1-miuT)^2+omega2*(miu2-miuT)^2; xigma(mindex)=xigmaB21; %保留每次计算的方差
%每次计算方差后,与上一次计算的方差比较。
保留最大方差为 finalT
if xigmaB21>xigmaB2
finalT=threshold;
xigmaB2=xigmaB21;
end
end
%比较方法两种阈值的不同
fT=finalT/255; %阈值归一化
T=graythresh(I_gray); %matlab函数求阈值
for i=1:wid
for j=1:len
if I_double(i,j)>finalT
bin(i,j)=255;
else
bin(i,j)=0;
end
end
end
figure,imshow(bin);
figure,plot(1:colorlevel,xigma);
end。