卫星导航差分系统和增强系统(十三)
卫星导航增强系统SBAS_图文

载波相位差分
• 1.单差观测方程
• 单差:即不同接收机(也称不同测站)同步观 测相同卫星所得观测量之差,单差又称一次 差,是相对定位中观测量的最基本线形组合 形式。
• 当测站在短距离内求差后,星历误差对测距 的影响只有原来的千分之一。
• 测站间求单差的模拟观测模型具有以下优势:
卫星导航增强系统SBAS_图文.pptx
• 这些系统综合使用了各种不同增强效果的导航增强技术,最终实现了其 增强卫星导航服务性能的目的。从增强效果上看,这些增强系统所使用 的卫星导航增强技术主要包括精度增强技术、完好性增强技术、连续性 和可用性增强技术。其中,精度增强技术主要运用差分原理,进一步可 分为广域差分技术、局域差分技术、广域精密定位技术和局域精密定位 技术;完好性增强技术主要运用完好性监测原理,进一步可分为系统完 好性监测技术、广域差分完好性监测技术等等。连续性和可用性增强技 术主要是增加导航信号源,进一步可分为天基卫星增强技术、地基伪卫 星增强技术等。当前卫星导航增强系统所采用的各种增强技术分类见下 表。
– (1)消除了卫星钟误差的影响; – (2)大大削弱了卫星星历误差的影响; – (3)大大削弱了对流层和电离层折射的影响,短距离内几乎可以
完全消除其影响。
当前卫星导航增强系统所采用的增强技术分类
WAAS发展阶段部署与 GEO卫星时间表
EGNOS系统空间段覆盖
具备EGNOSt-1R卫星
SBAS系统原理示意图
差分定位系统结构
差分定位
• 3.3 相位平滑伪距差分
• 现在很多接收机都能够提供原始观测量,即除了位置信息外,还有 伪距值和载波相位值。载波相位值的测量精度比码相位值的测量精 度高出2个数量级。如果能知道载波频率的整周数,那么就获得了 近乎无噪声的伪距值。一般情况下,无法获得载波相位整周数,但 能获得载波多普勒频率计数。实际上,载波多普勒计数测量反映了 载波相位变化信息,即反映了伪距变化率。在接收机中,一般利用 这一信息作为用户的速度估计。考虑到载波相位测量的高精度,并 且精确反映了伪距的变化,利用这一信息来辅助码伪距测量,就可 以获得比单独采用码伪距测量更高的精度。这一思想称为相位平滑 伪距测量,又可将其分为载频多普勒计数平滑伪距和载波相位平滑 伪距。这是由观测量的量纲不同而分类的。前者是以频率周数为单 位,后者是以载波波长为单位。两者利用平滑技术进行伪距差分的 方法是相同的。
卫星导航差分系统和增强系统(七)
卫星导航差分系统和增强系统(七)+刘天雄3.2 地基增强系统3.2.1 工作原理地基增强系统(GBAS)通过多个位置确定的地面参考站监测导航信号,同时监测电离层和对流层等空间天气对导航信号传播时延的影响,生成导航信号的差分改正数和系统完好性信息,再由一部或多部地面发射机将增强信息播发给用户。
GBAS通常都是对卫星导航系统的局部区域增强,利用差分技术,计算卫星导航信号的局域改正值以提高系统定位精度,同时通过完好性监视算法,给出系统的完好性信息。
GBAS主要用于对实时定位精度和信号完好性指标较为苛刻的民航导航,为机场范围内提供精密进场、离场程序、和终端区作业服务,满足民用航空精密进近和着陆引导对定位精度、完好性和可用性的要求。
在民航飞机着陆和精密进近过程中,针对GNSS信号缺乏实时、快速的闭环健康监控手段,国际民航组织ICAO定义的GBAS 是解决引导飞机精密进近过程中卫星导航系统的精度,特别是完好性指标不满足系统要求的问题,鉴于GBAS服务区域十分有限,美国联邦航空管理局将G B A S称为局域增强系统(Local Area Augmentation System,LAAS)。
G B A S一般利用甚高频(v e r y h i g h frequency,VHF)无线电地面通信链路向用户播发差分改正数和完好性信息,服务范围一般为30~50km。
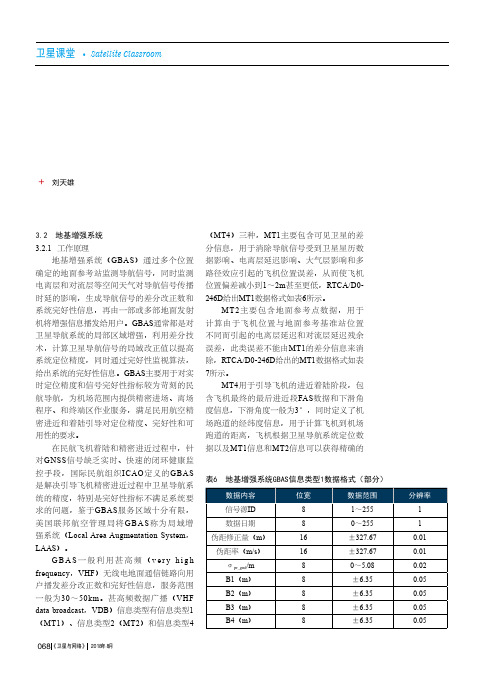
甚高频数据广播(VHF data broadcast,VDB)信息类型有信息类型1(MT1)、信息类型2(MT2)和信息类型4(MT4)三种,MT1主要包含可见卫星的差分信息,用于消除导航信号受到卫星星历数据影响、电离层延迟影响、大气层影响和多路径效应引起的飞机位置误差,从而使飞机位置偏差减小到1~2m甚至更低,RTCA/D0-246D给出MT1数据格式如表6所示。
M T2主要包含地面参考点数据,用于计算由于飞机位置与地面参考基准站位置不同而引起的电离层延迟和对流层延迟残余误差,此类误差不能由MT1的差分信息来消除,RTCA/D0-246D给出的MT1数据格式如表7所示。
差分GPS系统有什么作用?(上)
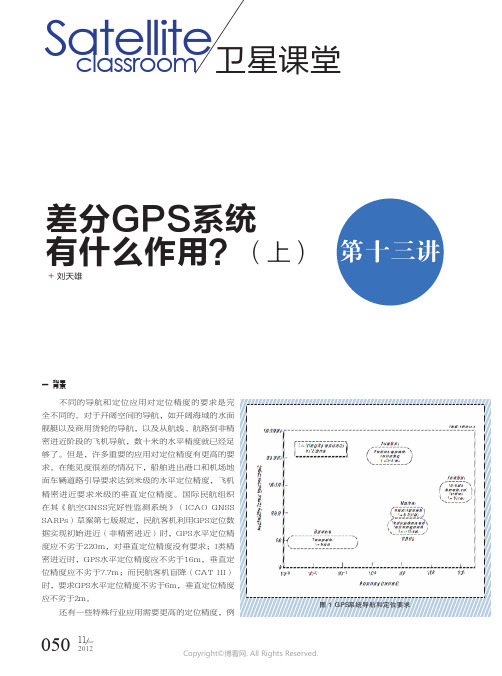
Nov2012Satelliteclassroom卫星课堂图1 GPS系统导航和定位要求差分GPS系统有什么作用?(上)第十三讲一 背景不同的导航和定位应用对定位精度的要求是完全不同的。
对于开阔空间的导航,如开阔海域的水面舰艇以及商用货轮的导航,以及从航线、航路到非精密进近阶段的飞机导航,数十米的水平精度就已经足够了。
但是,许多重要的应用对定位精度有更高的要求。
在能见度很差的情况下,船舶进出港口和机场地面车辆道路引导要求达到米级的水平定位精度,飞机精密进近要求米级的垂直定位精度。
国际民航组织在其《航空GNSS完好性监测系统》(ICAO GNSSSARPs)草案第七版规定,民航客机利用GPS定位数据实现初始进近(非精密进近)时,GPS水平定位精度应不劣于220m,对垂直定位精度没有要求;I类精密进近时,GPS水平定位精度应不劣于16m,垂直定位精度应不劣于7.7m;而民航客机盲降(CAT III)时,要求GPS水平定位精度不劣于6m,垂直定位精度应不劣于2m。
还有一些特殊行业应用需要更高的定位精度,例+ 刘天雄050Copyright©博看网. All Rights Reserved.Satellite& Network如,水库或水电站的大坝由于水负荷的重压而产生变形,危及坝体的安全,需要对大坝外观变形进行连续而精密的监测,监测精度要求为亚毫米级。
滑坡是指在一定环境中斜坡岩土在重力作用下,由于内外因素的影响,使其沿着坡体内一个或几个软弱面(带)发生剪切下滑现象。
对水库、山区高速公路、铁路等附近区域滑坡体的三维变形实时监测,规避山体滑坡造成的民众人身安全风险十分必要,监测精度要求为毫米级。
如此高的定位精度要求仅仅单独靠GPS系统是无法实现的。
大地测量、航空和航海等GPS系统高端用户对定位精度和导航信号完好性要求如图1所示。
如何进一步提高GPS导航和定位的精度呢?要解决这个问题,就要先了解差分GPS。
卫星导航系统实时精确定位方法改进策略
卫星导航系统实时精确定位方法改进策略导航系统在现代社会中扮演着重要的角色,卫星导航系统的出现为实时精确定位提供了可行性。
然而,随着导航技术的发展,仍存在许多不足之处,需要改进的地方。
本文将探讨现有卫星导航系统实时精确定位方法的不足,并提出改进策略。
一、不足之处现有的卫星导航系统存在以下问题:1.多路径效应多路径效应是卫星导航系统中的一大挑战。
当信号在传播过程中经过建筑物、地形等障碍物反射时,会产生多个路径的信号。
这些多路径信号对接收信号的质量和精确性造成严重影响,导致定位误差增加。
2.卫星几何卫星几何指的是卫星在天空中的分布情况。
由于地球曲率以及卫星数量有限,卫星几何会对接收信号的强度和精确性产生影响。
在山区、城市峡谷等特殊地形中,卫星几何会变得更加复杂,导致定位误差增大。
3.钟差误差卫星导航系统中的钟差误差是导致实时精确定位误差的主要因素之一。
卫星内部的原子钟可以提供非常高的精度,但由于各种因素的影响(例如温度、振动等),钟差误差仍然存在。
这种误差会直接影响到卫星导航系统的定位精度。
二、改进策略针对以上问题,我们可以采取以下策略进行改进:1.多路径抑制技术为了解决多路径效应问题,可以采用多路径抑制技术。
通过采集和分析多路径信号,对其进行滤波和抑制,从而提高接收信号的质量和精确性。
采用多频率信号处理方法,利用不同频率的信号来抑制多路径效应,可以有效减小多路径引起的位置偏差。
2.增加卫星数量为了改善卫星几何,可以通过增加卫星数量来提高定位精度。
增加卫星数量可以提供更多的可见卫星,改善接收信号的质量和强度。
此外,选择高海拔地点部署卫星,可以改善在特殊地形中的卫星几何。
3.时钟校正技术时钟校正技术可以用于解决钟差误差问题。
通过定期校正卫星内部的原子钟,消除由于温度和振动等因素引起的钟差误差。
利用地面测量站和参考卫星进行时钟校正,可以提高卫星导航系统的定位精度。
4.增加增强定位技术除了以上策略,还可以考虑增加增强定位技术,例如差分GPS技术和增强型现实技术等。
卫星导航差分系统和增强系统(十)

卫星导航差分系统和增强系统(十)+刘天雄3.4.1 美国广域增强系统WAAS3.4.1.1 系统组成广域增强系统(Wide Area Augmentation System,WAAS)是美国的星基增强系统,是为满足美国民用航空对GPS更高的精度和完好性要求,1992年,美国联邦航空管理局(FAA)在WADGPS的基础上设计的。
其利用GEO地球同步静止轨道卫星广播GPS差分修正数据和完好性信息电文,实现在北美地区GPS系统的完好性增强。
WAAS系统的GEO卫星不仅作为完好性告警通道,播发增强信号的同时还提供测距服务,利用GEO卫星覆盖范围大且位置相对稳定的特点,对地面用户高仰角高,作为一个稳定的测距信号源,可补充GPS星座用户可见卫星数量。
WAAS系统的发展经历了四个阶段,一是初始运行阶段(Initial Operating Capability,IOC),2003年已实现目标,2003年7月10日,FAA宣布WAAS系统为民航提供服务,服务范围覆盖美国本土95%的区域以及阿拉斯加部分区域。
二是全面实现带垂直引导的水平进近LPV服务(Full LPV Performance),2008年已实现目标,2007年服务区域扩展到加拿大和墨西哥。
三是全面实现带垂直引导的水平进近LPV-200服务(Full LPV-200 Performance),2014年8月,WAAS系统可为全美提供LPV-200服务。
四是开展双频多系统(dual-frequency multi-constellation,DFMC)兼容互操作研究,进一步提升WAAS系统的可用性,计划在2014年~2028年期间实现DFMC 服务。
目前,WAAS系统支持民航航路、终端、进近以及带垂直引导的水平进近(Localizer Performance with Vertical,LPV)服务,为美国和加拿大一千多个机场提供仪表垂直引导进近(vertically guided instrument approach)服务,即带垂直引导的水平进近LPV-200服务(接近CAT-I进近水平),可以引导飞机从200英尺的高度着陆(height above touchdown,HAT)。
卫星导航差分定位

跟踪观测GPS卫星的 伪距相位
测得的伪距、相位和 电离层延时的结果传 输到中心站
计算三项误差的改正 数包括卫星星历误差、 卫星钟差、电离层延时
将这些误差改正用数 据通信链传输到用户 站
用户用接收到的误差 改正观测量,得到GPS 精确定位
网络RTK—虚拟参考站(VRS)
•由若干个连续运行的 GNSS基准站、控制中心 和用户站(移动站)构成。
基准站 实际坐标 = x+0, y+0 校正 = x-5, y+3
位置差分
优点: 计算方法简单,适用范围较广; 缺点: 实现位置差分原理的先决条件是必须保证基准站和用 户站观测同一组卫星的情况; 适用范围:用户与基准站间距离在100km以内。
接收机估计位置
真实位置 (已知)
X X X 0 Y Y Y0 Z Z Z0
➢ 根据差分改正数类型 ▪ 位置差分 ▪ 距离差分
➢ 根据观测值的类型 ▪ 伪距差分 ▪ 载波相位差分
➢ 根据覆盖范围 ▪ 局域差分 ▪ 广域差分
位置差分
x+30, y+60
-5, +3
流动站
电台
差分改正 = x+(30-5) and y+(60+3) 实际坐标 = x+25, y+63
x+5, y-3
vbj )
akb
(Rak
Rbk ) c(da
d
b
)
(dM
k a
dMbk ) (vak
vbk )
求 消除钟差 差
ajbk ajb akb
(Raj
Rbj
Rak
Rbk
)
(dM
卫星导航差分系统和增强系统(九)
卫星导航差分系统和增强系统(九)+刘天雄配备双频接收机的测距与完好性监视站(RIMS)测量可见星(仰角大于15°)的电离层延迟数据,获得的电离层延迟再转换为对应电离层穿透点(IPP)的垂直延迟。
所有RIMS站得到的垂直延迟送入主控中心(MCC),用于计算某一网格的4个网格点(IGP)的垂直电离层延迟。
计算电离层延迟改正数的算法有很多,例如,对于第k个IGP,MCC在计算垂直电离层延迟时,首先以第k个IGP为圆心,以R(一般为1000km)为半径画圆,使用处于圆内的电离层延迟采用距离倒数加权法计算该IGP的垂直电离层延迟。
主控站获得这些电离层校正数据经导航注入站注入GEO卫星,由卫星将校正数据播发给服务区内的用户。
SBAS能够测量出对流层的温度、压力和相对湿度等,因为这些量的空间相关距离很短,所以由MCC估算出该延迟发给用户没有太大意义。
SBAS电文不含对流层校正值,延迟补偿模型需要设置在接收机内,一般可以消除90%的对流层延迟。
SBAS通过对各类改正数误差的确定及验证来完成对广域差分改正数完好性的监测,广域差分改正数包括卫星星历改正、卫星钟差改正和电离层网格垂直延迟改正。
卫星星历改正和卫星星钟改正都是与卫星有关的误差改正,这两种改正数相应的误差综合给出,以用户差分距离误差(User Differential Range Error,UDRE)表示。
电离层网格垂直延迟改正相应的误差以GIVE表示。
用户差分距离误差(UDRE)指由经差分修正后的空间信号误差引起的用户误差。
因此它是经星历误差修正和卫星钟差修正后的真实用户级误差。
考虑完好性的概率要求,UDRE可以定义为在系统服务区内,可视卫星星历及钟差改正数误差相应的伪距误差的置信限值。
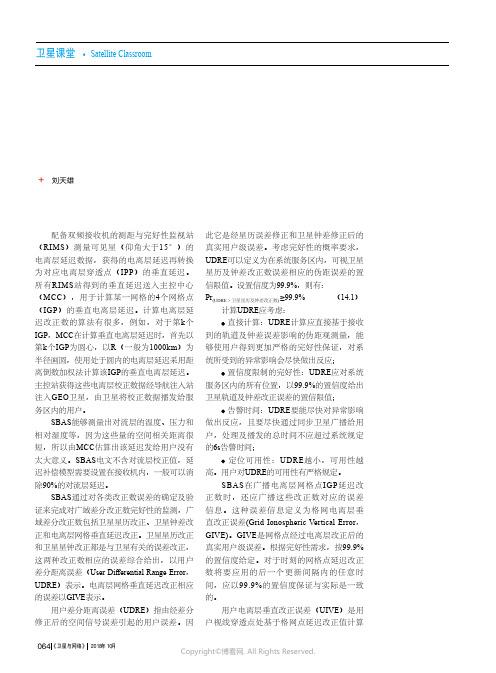
设置信度为99.9%,则有:Pr(UDRE > 卫星星历及钟差改正数) ≥99.9% (14.1)计算UDRE应考虑:直接计算:UDRE计算应直接基于接收到的轨道及钟差误差影响的伪距观测量,能够使用户得到更加严格的完好性保证,对系统所受到的异常影响会尽快做出反应;•置信度限制的完好性:UDRE应对系统服务区内的所有位置,以99.9%的置信度给出卫星轨道及钟差改正误差的置信限值;•告警时间:UDRE要能尽快对异常影响做出反应,且要尽快通过同步卫星广播给用户,处理及播发的总时间不应超过系统规定的6s告警时间;• 定位可用性:UDRE越小,可用性越高。
卫星导航增强技术与系统读书笔记

《卫星导航增强技术与系统》读书笔记目录一、内容概要 (2)1. 卫星导航系统的基本概念 (3)2. 卫星导航增强技术的意义与作用 (4)二、卫星导航增强技术原理 (5)1. 多源增强原理 (6)2. 地面增强原理 (7)3. 空间增强原理 (8)三、卫星导航增强系统技术分类 (10)1. 主要技术分类 (11)2. 各类技术的特点与发展趋势 (13)四、卫星导航增强系统硬件设备 (14)1. 发射器 (16)2. 接收器 (18)五、卫星导航增强系统软件算法 (19)1. 数据处理算法 (22)2. 角度计算算法 (23)3. 位置计算算法 (25)六、卫星导航增强系统测试与验证 (26)1. 测试方法 (27)2. 验证方法 (28)3. 测试与验证实例 (30)七、卫星导航增强系统典型应用 (31)1. 军事应用 (33)2. 气象应用 (34)3. 导航应用 (35)八、卫星导航增强技术发展前景 (36)1. 技术创新方向 (37)2. 应用拓展前景 (38)九、结论 (40)1. 卫星导航增强技术的重要性 (41)2. 对未来发展的展望 (42)一、内容概要本书主要介绍了卫星导航增强技术与系统,包括卫星导航系统的基本原理、发展历程和现状,以及卫星导航增强技术的分类和应用。
卫星导航系统概述:介绍了卫星导航系统的定义、发展历程和组成部分,重点阐述了美国的GPS、俄罗斯的GLONASS、欧洲的伽利略和中国的北斗等系统。
卫星导航增强技术:详细讲解了卫星导航增强技术的分类,包括空间增强、地面增强、用户设备增强等,以及这些技术的工作原理和典型应用。
卫星导航系统与增强技术融合:探讨了卫星导航系统与增强技术融合的发展趋势和前景,包括多源数据融合、多模导航、室内外一体化等方向。
卫星导航增强系统设计与实现:介绍了卫星导航增强系统的设计原则、关键技术、实现方法和典型应用案例。
卫星导航增强技术应用场景:分析了卫星导航增强技术在交通运输、智能出行、农业、海洋、公共安全等领域的应用潜力和价值。
中国精度星基增强系统

18
Part There
定位性能
中国精度南海测试数据
19
Part There
定位性能
中国精度南海测试数据
20
目
CONTENTS
录
1 2
系统简介
系统意义
3
4 5
定位性能
服务及产品 中国精度接收机
21
Part Four
服务及产品
中国精度解决方案
提供不同层级定位精度服务&全套的解决方案
5.7 cm (2-sigma)
中国精度内符合定位精度: 1-sigma :2.5 cm (68%) 2-sigma :5.7 cm (95%)
15
Part There
定位性能
中国精度收敛优势
1 0.9 0.8 0.7
Horizontal Error (meters)
中国精度 竞争对手 1 竞争对手 2
12
• ATLAS L1
• ATLAS Local
目
CONTENTS
录
1 2
系统简介
系统意义
3
4 5
定位性能
服务及产品 中国精度接收机
13
Part There
定位性能
全球星站差分系统介绍
中国精度(China CM) 厂商:中国思壮 服务:中国区(H100、H30、H10) 性能:<8cm 价格:四大星基系统最便宜 StarFire 厂商:美国NOVCOM 服务:中国区(WCT) 性能:10-35cm 价格:接收机贵、服务码贵
0.6 0.5 0.4 0.3 0.2 0.1 0
中国精度 20分钟即可收 敛到10cm左右的精度; 比另外两家星基差分服 务的收敛时间都快。
卫星导航增强系统与方法的新进展
卫星定位增强系统发展
北斗一代增强系统
卫星定位增强系统发展
JPL全球差分GPS系统 - IGDG
GDGPS Operations Center
QuickTime?anda Pho to -J PEGdeco mpre s or arenededtose thispicture.
区别:
网络RTK:基于双差残差构建误差改正模型 HiRIM:每颗卫星分别构建误差改正模型
联系:
当电离层薄层高度设定为0时,HiRIM方法所得非差残 差中包含的双差残差关系并未发生变化
增强系统关键技术进展
基于非差电离层改正数的网络RTK方法
将全部参考站划分为若干三角子网, 分别对各子网构建每颗可视卫星的 基于非差电离层改正数的网络RTK 方法 由于对每个子网内任意测站每颗可
算例(江苏CORS网)——170km
数据处理 检测站 检测时 卫星
模式
个数 段数 轨道
igs
L1静态
igs
brd
brd
9
220
igs
igs L1动态
brd
brd
注:数据采样间隔为30s
卫星 钟差
igs rec brd rec igs rec brd rec
rms_ E
(mm) 7.9
7.9 7.7 8.1 9.9 9.9 9.9 9.9
卫星定位增强系统发展
WAAS的全球进展
China MSAS
GAGAN
WAAS
EGNOS
SA/WAAS
世界已建或在建 WAAS 系统
卫星定位增强系统发展
美国WASS系统
卫星定位增强系统发展
GNSS基本原理、差分原理、误差等解析

北京天恒昕业第一期技术培训
目录
1.GNSS系统 2.GPS发展差分定位原理 3.GPS GNSS增强系统 4.卫星运动及GPS卫星星历 5.GPS现代化 6.GPS测量定位的误差源
一、GNSS的定义
全球卫星导航系统(GNSS):
(Global Navigation Satellite System)是一种以卫
轨道面与赤道面夹角65°;运行周期为11小时15分;
频率基准铯钟,包括S码、P码、L1与L2载波; 单点水平定位精度约16米。
3、欧盟GALILEO系统
欧盟Galileo的全球卫星导航服务系统( GALILEO Satellite Navigation System )。
主要参数:
30(27+3)颗卫星; 3个圆轨道,平均高度24126KM; 轨道面与赤道面夹角56°; 单点水平定位精度约1米;
• 中心力——假设地球为匀质球体的引力 • 非中心力——摄动力,包括地球非球形对称的作用 力、日月引力、大气阻力、光辐射压力、地球潮汐 力
卫星运动
• 影响卫星轨道的因素及其研究方法
对应两类作用力,产生了两种研究方法
• 无摄运动——忽略所有摄动力,仅考虑地球质心引 力 • 受摄运动——在二体问题基础上,再加上摄动力来 推求卫星运动轨道
星为基础的无线电导航系统,系统可提供时间/空间基准
和所有与位置信息相关的实时动态信息,又称天基系统。
??
GNSS GPS
二、GNSS构成
Compass
GPS GLONASS Galileo
1、美国GPS系统
美国的全球卫星定位系统(Global Positioning
System —GPS)。
卫星导航差分系统和增强系统(十二)

3.4.2 欧洲静止轨道卫星导航重叠服务3.4.2.1 系统组成欧洲地球静止轨道卫星导航重叠服务(European Geostationary Navigation Overlay Service,EGNOS)是GPS在欧洲的星基增强系统(SBAS),目的是在欧洲民用航空委员会(European Civil Aviation Conference,ECAC)服务区域从定位精度和完好性两个方面改善GPS的导航性能,其中完好性需要满足导航服务的可用性和连续性指标要求。
EGNOS系统通过GEO卫星广播GPS卫星轨道和时钟改正数、电离层延迟改正数、完好性信息,给出具有较高置信度的位置误差边界,达到增差分系统和增强系统(十二)卫星导航+刘天雄强GPS服务的目标。
2002年,欧盟和欧空局(ESA)启动EGNOS系统论证,2005年建设地面运行控制系统并同步部署卫星,2008年1月份系统空间段卫星播发导航增强信号,2010年EGNOS全面运营。
EGNOS系统由地面段、空间段、用户段三部分组成,如图37所示,地面段由4个任务控制中心(Mission Control Center,MCC)、41个地面测距和完好性监测站(Ranging and Integrity Monitoring Station,RIMS)、6个地面导航增强信息注入站(Navigation Land Earth Station,NLES)和一套EGNOS系统广域通信网络(Wide Area Network,EWAN)组成。
MCC图37 EGNOS系统组成负责任务控制和数据处理工作,4个MCC中1个工作,1个热备,2个冷备;41个RIMS分布在欧洲20余个国家,负责监测GPS和GLONASS卫星信号。
空间段包括3颗GEO卫星,卫星播发中心频点为1575.42MHz的EGNOS增强信号。
此外,EGNOS系统配置了系统性能评估和检查机构(Performance Assessment and Checkout Facility,PACF)以及应用检定机构(Application Specific Qualification Facility,ASQF),作为系统正常运行的支撑机构。
全球四大导航系统

全球四大卫星定位系统目前,世界上只有少数几个国家能够自主研制生产卫星导航系统。
当前全球有四大卫星定位系统,分别是美国的全球卫星导航定位系统GPS、俄罗斯的格罗纳斯GLONASS系统、欧洲在建的“伽利略”系统、和中国的北斗卫星导航系统。
一、美国GPS长期垄断美国国防部从1973年开始实施的GPS系统,这是世界上第一个全球卫星导航系统,在相当长的一段时间内垄断了全球军用和民用卫星导航市场。
GPS全球定位系统计划自1973年至今,先后共发射了41颗卫星,总共耗资190亿美元。
GPS 原来是专门用于为洲际导弹导航的秘密军事系统,在1991年的海湾战争中首次得到实战应用。
随后,在科索沃战争、阿富汗战争和伊拉克战争中大显身手。
从克林顿时代起,该系统开始应用在了民用方面。
现运行的GPS系统由24颗工作卫星和4颗备用卫星组成。
美国利用GPS获得了巨大的经济利益,多年来在出售信号接收设备方面赚取了巨额利润。
以1986年为例,当时一台一般精度的GPS定位仪价格5万美元,高精度的则达到10万美元。
现在价格虽然有所下降,但也可推算出20年来GPS“收获颇丰”。
以GPS为代表的卫星导航定位应用产业,已成为八大无线产业之一。
据美国国家公共管理研究院进行的调查评估表明,GPS的全球销售额将以每年38%的速度增长,2005年全球GPS市场已达到310亿美元。
长期以来,美国对本国军方提供的是精确定位信号,对其他用户提供的则是加了干扰的低精度信号——也就是说,地球上任何一个目标的准确位置,只有美国人掌握,其他国家只知道个“大概”。
在海湾战争时,美国还曾置欧盟各国利益不顾,一度关闭对欧洲GPS服务。
2003年3月20日,伊拉克战争爆发。
大批轰炸机、战斗机猛扑向伊拉克首都巴格达,用炸弹准确地将一座建筑彻底摧毁,行动代号:“斩首行动”;4月,一架B-1B“枪骑兵”轰炸机临时接到任务,用炸弹摧毁了另一座建筑。
他们的目标都是一个人:萨达姆侯赛因,他们所使用的炸弹都是一种:联合攻击炸弹(JDAM),这些炸弹之所以都能够精确的打击目标,是因为他们都是通过卫星定位来实现定位,提供这种定位服务的正是由24颗美国卫星组成的全球定位系统--GPS。
第12章 卫星导航增强技术
12.1 卫星增强系统分类
12.1 卫星增强系统分类
差分数据分类 按照卫星导航系统分
GPS,GLONASS 北斗,GALILEO 按照内容分 伪距差分(原始数据或者改正数) 载波相位差分(原始数据或者改正数) 基准站信息 按照格式分 CMR RTCM2.X,RTCM3.X
12.1 卫星增强系统分类
12.2 差分GNSS技术
差分GNSS(differential GNSS,DGNSS)是通过位置精确 已知的参考站接收GNSS信号,将测得的位置或距离数据与已 知的位置、距离数据进行比较,得出准确改正值,然后将这 些改正数据通过数据链发播给覆盖区域内的用户,用户根据 接收到的数据进行位置解算,以提高GNSS定位精度。差分定 位系统DGNSS使用差分增强技术作为GNSS本身的补充与改 进措施,能有效提高系统的服务精度、可用性、连续性和完 好性指标。
12.2 差分GNSS技术
基准站通过数据链将此改正数发送出去,用户接收后对其解 算的用户站坐标进行改正,
X Yu
u X Yu*
* u
X Y
Zu
Zu*
Z
式中,(Xu*, Yu*, Zu*)为用户接收机自身观测结果,(Xu, Yu, Zu) 为经过改正后的用户坐标。
12.2 差分GNSS技术
地基增强系统的误差源分为5个方面,分别是大气层误 差、电离层误差、地面参考接收机误差、飞机GNSS接收机 误差、飞机多路径效应误差。
12.1 卫星增强系统分类
星基增强系统
星基增强系统(satellite based augmentation system,SBAS) 是利用地球静止轨道卫星(geostationary orbit satellite,GEO) 建立的地区性广域差分增强系统,通过地球静止轨道卫星搭载 卫星导航增强信号转发器,可以向用户播发星历误差、卫星钟 差、电离层延迟等多种修正信息,实现对于原有卫星导航系统 定位精度的改进,从而成为各航天大国竞相发展的手段。
GNSS星基增强系统综述
GNSS星基增强系统综述摘要:自GPS提供全球导航定位服务以来,无论是在经济、政治还是军事、民用等方面都发挥了重要的作用,基于此,目前许多国家都在论证和建设自己的卫星导航定位系统,比如,俄罗斯的GLONASS、欧盟的Galileo等,中国的北斗卫星导航定位系统(BeiDou Navigation Satellite System,BDS)也于2012年底正式运行,并到2020年将能够提供全球服务。
由各国卫星导航系统所构成的全球卫星导航系统(Global Navigation Satellite System, GNSS)广泛应用于位置服务、道路铁路、航空航天、农业、测绘、授时同步等多个领域,特别是在民用航空领域,其优势更加突出[1]。
在状态空间域差分技术中广域精密定位技术主要以载波观测量为主,可以达到分米甚至厘米级的定位精度,但其需要解算模糊度参数,因此初始化时间长,且在卫星机动条件下,其解算的卫星星历及星钟差分改正数精度较低;而广域差分技术,主要以伪距观测量为主,定位精度只有1-3m,但其模型简单,解算速度快,不需要初始化时间,且能够提供完备性信息,因此在民用航空领域得到了广泛的应用。
关键词:星基增强、卫星导航、广域差分1 意义当前中国民航正在实施民航强国战略,要求加快建设现代空中交通服务系统。
到2020年,中国民航运输机队规模将达到4000架,通用航空机队规模将达到5000架,航空器年起降架次将超过1500万,运输总周转量将达到1700亿吨公里以上,旅客运输量将超过7亿人次。
中国是一个多地形国家,机场环境差异较大,依靠传统的仪表着陆系统、测距仪等陆基导航设备无法对飞机的安全起降做出充分的保证,且其设备投资巨大,维护费用较高。
当前国际民用航空领域正在从陆基导航向星基导航(卫星导航系统及其增强系统)过渡。
但我国目前在主要航路和终端、进近仍以陆基导航为主要设备源,因此,基于中国民航运输航空运行需求和导航技术发展现状,中国民航在其制定的导航技术发展战略的中期(2021年~2030年)将稳步推进从陆基导航向星基导航过渡,并建议开展星基增强系统(Satlellite Based Augmentation System,SBAS)的研究和实验工作。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
066《卫星与网络》2019年4月3.4.2.2 工作原理EGNOS系统体系结构复杂且高度冗余,EGNOS系统的设计目标是满足SBAS的标准要求,开展以下四方面的工作,一是接收GPS、GLONASS、及EGNOS-GEO卫星播发的信号和电文数据;二是估计服务区的系统完好性数据和广域差分(Wide Area Differential,WAD)改正数;三是通过GEO卫星广播类似GPS卫星的增强信号,电文包含轨道和时钟改正数、电离层延迟改正数及系统完好性数据,信号同时具有测距功能;四是验证上述完好性数据和改正数的正确性。
EGNOS系统工作原理和美国WAAS基本一致,EGNOS系统地面测距和完好性监测站RIMS接收GPS、GLONASS导航信号以及EGNOS系统GEO卫星的增强信号,将原始数据送到4个任务控制中心MCC,每个任务控制中心MCC的中心处理设备CPF开展导航信号改正数的实时计算,包括卫星星历、星载原子钟钟差、电离层延迟改正数以及系统完好性信息,然后地面导航增强信息注入站NLES将EGNOS增强电文上行注入给GEO卫星,最后由GEO卫星将EGNOS增强信号透明转发给用户,EGNOS系统运行示意图如图41所示。
EGNOS系统用3颗GEO卫星覆盖整个欧洲服务区,作为透明转发器播发地面导航增强信息注入站NLES上注的增强信号。
在一颗GEO卫星链路出现失效时,EGNOS系统空间段还有两颗GEO卫星能够正常工作,这种配置可以在整个服务区内具有较高程度的冗余度。
EGNOS系统的运行控制理念是确保在服务区内任何位置都有两颗GEO卫星正常播发系统的增强信号。
差分系统和增强系统(十三)卫星导航+刘天雄理论上,用户只要接收到一颗GEO卫星播发的系统增强信号,就能获得EGNOS位置解(需要同时接收GPS或者GLONASS导航信号),在剩下的两颗卫星中有一颗意外服务中断情况下,系统通过切换链路就可以确保系统的可靠性。
作为GPS系统在欧洲的星基增强系统SBAS,EGNOS系统GEO卫星在GPS系统的L1频点(1575.42 MHz)播发增强信号,信号也是采用右旋圆极化(right-hand circular polarization,RHCP)方案。
EGNOS系统播发每秒含有250bits信息的增强电文,原始导航增强电文采用与前向误差修正码(Forward Error Correcting,FEC)的1/2卷积编码方案,增强电文数据流的信息速率是500symbol/second。
图41 EGNOS系统运行示意图增强电文再与1023-bit伪随机测距码模二和处理生成扩频信号,然后利用二相移位键控技术(biphase shift-keyed,BPSK)将扩频信号调制到L1载波信号上,信号码速率1.023Mega-chips/second。
EGNOS增强信号结构符合ICAO SARPs制定的SBAS星基增强标准,详见http://www.navipedia.net/index.php/EGNOS_Messages。
对于地面5°以上仰角的用户,EGNOS系统增强信号的落地电平-161dBW~-153 dBW,在EGNOS系统开放式服务OS和生命安全服务SOL的接口控制文件中详细定义了EGNOS系统增强信号结构,详见MOPS DO 229相关规定,包括载波频率、调制方式、电文结构、电文协议和内容,增强信号的主要特征如下:·载噪比(Carrier Phase Noise): 10Hz单边噪声带宽时,单载波信号的相位噪声谱密度要使接收机锁相环路能够跟踪到载波信号的精度是0.1弧度(rms);·信号频谱(Signal Spectrum): 利用GPS系统的L1频点播发EGNOS系统增强信号,中心频点1575.42MHz,信号带宽2.2MHz,在中心频点+/- 12MHz带宽内,信号功率不小于95%;·多普勒频移(Doppler Shift): 在最坏情况下,稳态用户的多普勒频移小于40m/s, 在L1频点的多普勒频移近似为210Hz ;·载波频率稳定性(Carrier Frequency Stability): 排除电离层延迟和多普勒频移后,在用户接收机天线的输入端处的载波频率短期稳定性(Allan方差的平方根值)优于5x10-11/1s~10s; ·极化方式(Polarization): 右旋圆极化,轴比小于2 dB;·相关损失(Correlation Loss): 由于信号调制过程中的不理想或者转发器滤波损失引起的相关损失小于1 dB;EGNOS系统Inmarsat-III通信卫星 (AOR-E和IOR-W)和ESA Artemis通信卫星星载导航增强转发器载荷的关键参数如表17所示,地面段计算GPS和GLONASS卫星精密的轨道、时钟、电离层延迟差分改正数以及完好性误差边界,空间段3颗GEO卫星作为冗余的增强信号播发通道,将地面段计算的增强信息透明转发给地面段用户。
用户利用EGNOS接收机计算当前的位置并获取完好性信息。
地面段同时还要完成系统性能分析、运行维护等任务。
EGNOS系统依靠高精度的GPS接收机提供的系统1 PPS(one Pulse Per Second)同步秒脉冲实现内部各个环节的时间同步任务,即EGNOS系统时间与GPST保持时间同步。
地面段对GPS、GLONASS、及EGNOS-GEO信号的监控(Monitoring and Control,M&C)工作由任务主控中心MCC的中心处理设备CPF实施,MCC由工作人员值守,并不是一个自动化系统,如果主控中心MCC工作异常,那么另一个热备的主控中心MCC将立刻接管EGNOS系统信号监控的任务,另外2个主控中心MCC处于冷备状态,当主份和热备主控中心MCC都出现问题后,2个冷备状态的主控中心MCC则立即被激活。
EGNOS系统是一个广域分布的、冗余的系统,各个子系统之间的数据流也具有不同程度的备份措施。
EGNOS系统数据流分为信号处理环路(Processing cycle)和信号检测环路(Check cycle),如图42所示,信号处理环路通过地面测距和完好性监测站RIMS的A通道接收GPS/GLONASS/EGNOS-GEO卫星信号,同时给出伪表17 星载导航增强转发器载荷的关键参数067Satellite& Network码和载波伪距观测量以及系统完好性信息,并生成增强信号,图中红线表示系统信号处理环路的实时关键数据流;信号检测环路通过地面测距和完好性监测站RIMS的B、C通道接收GPS/GLONASS/EGNOS-GEO卫星信号,将原始数据送到系统任务主控中心MCC的中心控制设备(Central Control Facility,CCF),独立开展伪码和载波伪距观测量以及系统完好性信息的验证和存档工作,图中绿线表示信号检测环路数据流;两个环路数据流闭环处理时间不超过6s,以满足EGNOS系统完好性对告警时间的要求。
EGNOS系统信号处理环路完备地给出了GPS/GLONASS/EGNOS-GEO卫星信号的差分改正数和系统的完好性信息,信号处理环路首先通过地面测距和完好性监测站RIMS的A通道接收GPS/GLONASS/EGNOS-GEO卫星信号,给出伪码和载波伪距观测量和与协调世界时UTCop的偏差。
巴黎地面测距和完好性监测站RIMS的监测接收机时钟与协调世界时UTCop保持同步,用于计算任务主控中心MCC中心处理设备CPF的EGNOS系统网络时间(EGNOS Network Time,ENT)与协调世界时UTC的偏差,ENT与UTC的时间偏差信息则通过增强电文MT12播发给用户,用户可以据此溯源UTC时间。
然后这些数据被送到任务主控中心MCC的中心处理设备CPF,生成差分改正数和系统完好性信息,具体处理流程分为四步,一是数据预处理和有效性验证,包括剔除电离层和对流层延迟等系统误差量,监测并剔除载波相位周跳观测量,数据平滑处理以减少随机噪声,滤除残余多径干扰信号分量;二是计算EGNOS增强数据,包括GPS/GLONASS/EGNOS-GEO卫星星历和时钟差分改正数、各网点电离层延迟改正数、用户差分测距误差UDRE和格网电离层垂直误差GIVE残余误差估计及其差分改正数据;三是系统内部增强数据检查和质量估计,包括卫星完好性评估、应用差分改正后用户差分测距误差UDRE和格网电离层垂直误差GIVE残余误差估计的一致性、中心处理设备CPF以服务质量标识形式反映结果的一致性,根据服务质量标识,地面导航增强信息注入站NLES可以选择主用中心处理设备CPF的数据;四是根据ICAO SBAS标准生成格式化的增强电文,并确定增强电文的最优播发顺序。
EGNOS系统信号处理环路实时关键数据流如图43所示,任务主控中心MCC的中心处理设备CPF的核心是一套复杂的系统完好性算法及其软件,决定了EGNOS系统的性能,其中对于用户差分测距误差UDRE和格网电离层垂直误差GIVE的计算是至关重要的,它们的误差边界确定了系统完好性,算法同时会影响系统的连续性和可用性指标评估结果。
CPF将生成并核对后的EGNOS电文通过系统广域通信网络EWAN送到地面导航增强信息注入站NLES,将EGNOS电文上行注入给系统的GEO卫星,由卫星播发给用户。
图43 EGNOS系统信号处理环路的实时关键数据流图42 EGNOS系统数据流068《卫星与网络》2019年4月069Satellite & Network EGNOS系统信号检测环路完备地通过地面测距和完好性监测站RIMS的B、C通道接收GPS/GLONASS/EGNOS-GEO卫星信号,在任务主控中心MCC的中心处理设备CPF生成EGNOS电文之前以及GEO卫星将其播发给用户之后,任务主控中心MCC的中心控制设备CCF独立开展系统完好性的验证工作,CCF同时开展数据统计试验,以验证差分改正数及其相应残余误差的可靠性。
对于用户等效测距误差(User Equivalent Range Error,UERE)和用户差分测距误差(User Differential Range Error,UDRE)来说,由多个地面测距和完好性监测站RIMS同时观测一颗卫星,然后开展伪距观测误差数据的统计分析工作,获得用户等效测距误差UERE及其残余误差——用户差分测距误差UDRE。
中心处理设备CPF计算的差分改正数及其残余误差与中心控制设备CCF独立计算的相应数据进行比对,当两者计算结果偏离较大时,系统给出完好性告警标识“not monitored”。