基于TMS320F2812定点库函数设计
基于TMS320F2812的电动机控制故障检测模块的设计研究

检测模 块 系统具 有 强大的数据 处理能 力、 据统 计和 分析 能 力 , 数 同时 又具 有 良好 的 稳 定性 , 而使 该模 块 具 从
有极 大的扩展 性和 实用性 。
关键 词 : MS 2 F 8 2 控 制 ; 障 ; 块 ; 计研Leabharlann 究 T 30 2 1 ; 故 模 设
中图分 类号 : P2 3 T 7 文献 标 志码 : A
tc biiy w ih is f a u e . ia l t t e t r s t Ke r y wo ds: TM S32 0F281 Co r , 2, ntol Fau t M odu e, sgn a e e r h l, l De i nd r s a c
T 30 2 1 M¥ 2 F 8 2是 一 款 高 速 的 信 号 处 理 芯 片 , 其 上集 成 了丰 富 的电 动机 控 制 模 块 , 括 : W M 电 包 P 路 、 获单 元 和正交 编 码脉 冲 QE 捕 P电路 j 独 特 的 , 硬 件设 计使 其 适合 数字 信 号 的处理 , 其对 F T等 尤 F 算 法在 运算 时 间上 优 势 更 为 明显 , 故 障信 号 处 理 是 系统 的理 想 选 择 , 用 F 8 2这 种 优 势 , 们 通 过 利 21 我
基于 T 3021 MS2F 82的电动机控制故障检 测模块的设计研 究
马 鸣鹤
( 宁 装 备 制 造 职 业 技 术 学 院 , 宁 沈 阳 10 6 ) 辽 辽 1 1 1
摘 要 : MS 2 F 8 2应 用范围广 阔, T 30 2 1 在信 号 处理模 块 的应 用 中占有重要 地 位 , 过研 究 , 通 对其 在故 障
试 验设 计 , 开发 了一 种 具 有 电 动机 控 制 功 能 的检 测
基于TMS320F2812的编码器电子学设计与实现

摘要 : 为克服传统 的编码器 电路 处理方案中存在 的诸 多弊 端, 如分 立元件多、 调整 电位 器多 、 集成度低 及 由于光 电信号 电流值 的离散 性比较大而造成的信号精度损失等 , 本文提 出基于高速信 号处 理器 T M S 3 2 0 F 2 8 1 2为处理 内核的编码器 电子学设计与实 现, 该 设计具有小型化 、 智 能化 、 简单化 的新型 电路处理方案 。 新 方案的设计确保 了信 号处理 的实 时性, 编码器数据 处理时间 约为 5 O u s; 能够进行大量 的数据处理 工作, 如信 号幅值 的检测 , 码道 的检查 , 进位 错误检查 , 信号参数 的快速 计算 ; 能够与 P C 机进行 快速 的数 据交换 ; 实现精码 信号 的放 大参数、 幅值参数 , 粗码信 号的鉴幅 电平 的 自动调整 , 便于 日后 的维护 , 方便用户 定 期 对 编 码 器 进 行 自维 护 工 作 。
t h e l o s s o f S i g n a l p r e c i S i o n d u e t o t h e l a r g e di s c r e t e n e s s o f t h e v i d i c o n’ s c u r r e n t v a l u e ,t h i S p a p e r h a s
c i r c u i t ,s u c h a s l o t s o f d i s c r e t e c o m p o n e n t , l o t s o f a d j u s t m e n t p o t e n t i o m e t e r , l o w i n t e g r a t i o n l e v e l a n d
a p r o c e s s o r c o r e .T h i S d e s i g n h a s a n e w c i r c u i t p r o c e s s p l a n o f m i ni a t u r i z a t i O n, i n t e l l e c t u a l i z a t i o n ,a n d S i m p l i f i c a t i o n . T h e d e s i g n o f t h e n e w p l a n c a n e n s u r e t h e t i m e l i n e s s o f t h e S i g n a l p r o c e s s a n d t h e d a t a p r o c e s S t i m e o f t h e e n c o d e r i S a b o u t 5 0 u s: c a n d e a l w i t h l a r g e n u m b e r s o f d a t a . s u c h a s t h e d e t e c t i o n o f s i g n a l a m p l i t u d e , t h e i n s p e c t i o n o f s i g n a l e n c o d e c h a n n e l a n d t h e w r o n g c a r r y a n d t h e f a s t c a l c u l a t i o n o f
基于TMS320F2812的机床数控系统设计

() 2 高性能的 3 2位 中央处理器 , 可以进行 1 6位
l 文保平 , 1 蔡晓. 电弧加 工全 桥式逆 变 电源试验 研究. 电加 工,9 8 19
() 3
1 刘晋春 , 2 赵家齐 , 赵万生. 特种加工 ( 3 ) 北京 : 械工业 出版 第 版 . 机
关键 词 : S 数控机 床 DP
(S ) D P 通过 U B . 接 口进行高速数据传递 。 S 20 满足 了系统的实时性要求。 控制 系统 U B . S 20
De in o sg f CNC y t m a e n T S s e B s d o MS 2 2 3 0F 81 2
自动化 控制 , 电力 电 子 技术 应 用 , 马达 伺 服 控 制 系 统
() 9 高性能 低功耗 , 用 18V内核 电压 和 33V 采 . . 外 围接 口电压 。 12 数控 系统 的硬件 构成 . 整个 机床 的数 控 系统 主要 由 以下 几部 分 组 成 : 工 业P C机 ,C机 与 D P的通 信 电路 , S P S D P以及 辅 助 电
Ab t a t n t i a e s r c :I h sp p r,i to uc d t e ma n f au e o n r d e h i e t r fTMS 2 28 2,su i d o h p n CNC y tm a e n 3 0F 1 tde nteo e s se b s d o TMS 20 81 3 F2 2.By u i h USB 0 i t ra e t c iv i h s e d ta se ewe n PC n P, sng t e 2. n e fc o a h e e h g p e r n f r b t e a d DS t r fr he eo e,t e ra h e l—tme c nr li a ife . i o to s s ts d i Ke ywo d r s:DS P;Nu rc lCo to c i e;Co r lS se ;US me ia n r lMa h n nto y tm B2. 0
基于TMS320F2812的DSP最小系统设计毕业设计论文

题目:基于TMS320F2812的DSP最小系统设计要求:TMS320F2812的DSP最小系统设计包括两个模块,即硬件设计模块和软件检测模块。
硬件设计模块包括电源设计、复位电路设计、时钟电路设计、存储器设计、JTAC接口设计等。
软件检测模块需要编写测试程序。
用Protel软件绘制原理图和PCB图。
从理论上分析,设计的系统要满足基本的信号处理要求。
DSP主要应用在数字信号处理中,目的是为了能够满足实时信号处理的要求,因此需要将数字信号处理中的常用运算执行的尽可能快。
这就决定了DSP的特点和关键技术。
适合数字信号处理的技术:DSP包涵乘法器,累加器,特殊地址发生器,领开销循环等;提高处理速度的技术:流水线技术,并行处理技术,超常指令等。
DSP对元件值的容限不敏感,受温度、环境等外部参与影响小;容易实现集成;VLSI 可以时分复用,共享处理器;方便调整处理器的系数实现自适应滤波;可实现模拟处理不能实现的功能:线性相位、多抽样率处理、级联、易于存储等;可用于频率非常低的信号。
关键词: TMS320F2812,CCS3.3,Protel99SE软件目录第1章绪论第2章系统设计2.1系统方案介绍2.2 系统结构设计第3章硬件电路设计3.1 TMS320F2812芯片介绍3.2电源及复位电路设计3.3 时钟电路设计3.4 DSP与JTAG接口设计3.5 DSP的串行接口设计3.6 通用扩展口设计3.7 总体电路原理图设计第4章软件设计4.1 程序设计4.2 仿真调试总结参考文献附录1:总体电路图附录2:程序代码第1章绪论数字化已成为电子、通信和信息技术的发展趋势与潮流。
在这种趋势与潮流的推动下,数字信号处理的理论与实现手段获得了快速的发展,已成为当代发展最快的学科之一。
而DSP芯片作为数字信号处理,尤其是实时数字信号处理的主要方法和手段,自20世纪70年代末、80年代初诞生以来,无论在性能上还是在价格上,都取得了突破性的迅猛发展。
基于TMS320F2812的信号处理系统的设计
信 号 电压 的 幅度 调 节 到 0~3V范 围 内 ; 外 R M 选 片 A 用 IS SI公 司 的 I6L 526 芯 片 作 数 据 缓 冲 ; S 1V 11 T S 2F 82 输 入 的信 号进 行 采 集 、 理 , 将 其 M 30 2 1 对 处 并 处理 结果 通 过 R 22总 线 接 口与 P S3 c进 行数 据 通 信 , 通过 串 口调试工具 实 时监 测发 送 和接 收数 据 ; D A C模
关 键 词 : S ; C ;采 集 ; 息 处 理 DP SI 信
中图法分类号 : 6 18 3 P 3 , +
文献标识码 : B
文章编 号:10 .142 1 )60 6 .2 0493 (0 00 .0 90
0 引ห้องสมุดไป่ตู้言
随着现代 科学 技 术 的发 展 和 计算 机 技术 的普 及 ,
系统结构框 图。
道值就 会 被保 存 到 相 应 的结 果 寄 存 器 ( eute0- R sl g- R R sh e l) eu R g5 中去 。其 A C模块框 图如 图 2所示 [l D 1 。 本 系统 采 用这 款 D P的 片上 A C模块 对待 处理 的信 S D 号进行 模数转 换 。该模 块有 l 6个通道 , 单通道 转换 的 最小的转换时间是 8 s 因此 , S 0n , D P的最大采样速率
石 21 年 00
・
油
仪
器
・6 ・ 9
第 2卷 4
第 6期
PT E ROLE UM NS RU I T MEN S T
计算机 与通讯 技术 ・
基于 T S2 F 82的信号处理 系统的设计 M 30 2 1
毕业设计---基于TMS320F2812的频谱分析仪设计

毕业设计(论文)题目基于TMS320F2812的频谱分析仪设计专业电子信息科学与技术学生姓名班级学号B****** B********指导教师指导单位通信与信息工程学院日期:2011年11月7日至2012年6月15日毕业设计(论文)原创性声明本人郑重声明:所提交的毕业设计(论文),是本人在导师指导下,独立进行研究工作所取得的成果。
除文中已注明引用的内容外,本毕业设计(论文)不包含任何其他个人或集体已经发表或撰写过的作品成果。
对本研究做出过重要贡献的个人和集体,均已在文中以明确方式标明并表示了谢意。
论文作者签名:日期:年月日摘要随着计算机和微电子技术的飞速发展,基于数字信号处理的频谱分析已经应用到各个领域并且发挥着重要作用。
但是在教学实践过程中,由于频谱分析仪价格昂贵,不能直观地给学生展示信号的频谱,从而使教学效果受到影响。
所以这个时候一个简单的频谱分析仪就显得很是简单实用,可以很直观地观察信号频谱以及对信号的各项参数的观测。
可以为数字信号处理的教学实践带来更多的帮助。
在本论文中采用TI的32位数字信号处理芯片TMS320F2812作为信号采集和处理的核心,通过片上自带的12位模数转换模块进行数据采集。
采集后的数据存储在片内存储器中。
数字处理部分主要是进行快速傅立叶变换的分析。
再通过片内数模转换单元转换为模拟信号输出。
全文介绍了DSP原理, TI公司TMS320系列F2812芯片资源,以及TMS320的软件集成开发环境(CCS)。
对频谱分析的实现作了细致的描述和分析.对数字信号处理中最经典的应用——快速傅立叶变换(FFT)运算,在定点DSP芯片上的实现做了分析和研究。
关键词:TMS320F2812;DSP;频谱分析;FF TABSTRACTNowadays, computer technique and micro electronic technique have developed rapidly. Spectrum analysis which is based on digital signal processing has been put into use in every field. Because of high cost of spectrum analyzer, it can not intuitively show frequency spectrum for students in practice of teaching. This may influence the teaching effect. At this time, a simple spectrum analyzer will be practical. It may intuitively observe signal frequency spectrum and parameters. It will better help teaching practice in digital signal processing.This article uses the 32-bit digital signal processing chip---- TMS320F2812 of TI to be the core of signal acquisition and signal processing. It processes data acquisition with its included 12 conversion module. The collected data are stored in internal storage. The part of digital handing is mainly to make analysis of fast Fourier transform and then transfer into analog output with analog-to-digital conversion unit.The full text introduces DSP theory, F2812 chip resource of TMS320 series in TI Company and CCS. It makes a detailed description of spectrum analysis. FFT operation is the most classical application in digital signal processing. This article also researches and analyzes the enforcement of FFT in DSP chip.Key words:TMS320F2812;DSP;spectrum analyzer;FFT目录第一章绪论................................................. - 1 -1.1论文背景......................................................... - 1 -1.2 FFT简介......................................................... - 1 -1.3 论文工作介绍.................................................... - 1 - 第二章 DSP原理............................................. - 3 -2.1 DSP简介......................................................... - 3 -2.1.1 DSP应用系统介绍.......................................... - 3 -2.2 DSP芯片的基本结构............................................... - 5 -2.2.1哈佛结构................................................... - 5 -2.2.3流水线..................................................... - 5 -2.2.3专用的硬件乘法器........................................... - 6 -2.2.4特殊的DSP指令............................................. - 6 -2.2.5快速的指令周期............................................. - 6 -2.3 TMS320C2000概述................................................. - 7 -2.4 DSP芯片的选择................................................... - 7 -2.5 小结.......................................................... - 8 - 第三章. F2812板及其开发环境CCS .............................. - 9 -3.1 F2812结构....................................................... - 9 -3.1.1 F2812硬件结构............................................. - 9 -3.1.2 F2812功能模块............................................ - 12 -3.1.3 F2812系统配置............................................ - 13 -3.1.4 中央处理单元(CPU)....................................... - 15 -3.2 CCS概述以及配置................................................ - 17 -3.2.1 CCS概述.................................................. - 17 -3.2.2 CCS的配置................................................ - 17 -3.3软件开发流程及代码生成工具...................................... - 19 -3.3.1软件开发流程.............................................. - 19 -3.3.2代码生成工具介绍.......................................... - 20 -3.4小结........................................................... - 20 - 第四章频谱分析原理及其DSP实现............................. - 22 -4.1 A/D转换模块................................................... - 22 -4.1.1 AD转换器的主要技术指标................................... - 23 -4.1.2 模数转换模块的主要特点.................................... - 23 -4.1.3 自动转换排序器的操作原理.................................. - 24 -4.1.4 ADC时钟的预定标......................................... - 26 -4.1.5 A/D转换F2812的实现...................................... - 27 -4.2 抗混叠滤波模块................................................. - 28 -4.3 FFT变换模块.................................................... - 31 -4.3.1 FFT基本原理.............................................. - 31 -4.3.2 FFT的定点DSP实现........................................ - 32 -4.3.3FFT运行结果................................................... - 34 -4.4 频谱分析仪..................................................... - 35 -4.5小结............................................................ - 35 - 结束语...................................................... - 37 - 致谢........................................................ - 38 - 参考文献.................................................... - 39 - 附录........................................................ - 40 -南京邮电大学2012届本科生毕业设计(论文)第一章绪论1.1论文背景随着计算机和微电子技术的飞速发展,基于数字信号处理的频谱分析已经应用到各个领域并且发挥着重要作用。
基于TMS320F2812的无刷双馈电机控制器的设计与实现

组 , 电机 定 子 绕 组 极 对 数 为 P 而 的用 作 控 制 绕 组 ;
另 外 一种无 刷 双 馈 电机 是 单 电机 结 构 , 种 结 构 把 这
J N nqa g WU Q n —u ,S N H n — i JA G B I G We —i , igx n U o gf , I N o A n e
( col f l tcl nier ga dA t a o ,Taj nvr t, i j 00 2 hn ) S ho o e r a E g ei n uo t n i i U i sy Ta i 3 0 7 ,C ia E ci n n m i nn ei nn
第2 7卷
第 4期
天
津
理
工
大
学
学
报
Vo _ l27 No. 4 Aug 2 1 . 01
2 1 年 8月 01
J oURNAL 0F ANJ N TI I UNⅣ E I RS TY OF TECHNoLOGY
文章编号 :6 30 5 2 1 )4 0 3 — 5 17 —9 X(0 1 0 -0 2 0
基 于 T 30 2 1 MS 2 F 8 2的无 刷 双 馈 电机控 制 器 的设 计 与 实现
姜文 强, 吴庆 勋 , 孙红 飞 , 蒋 波
( 天津大学 电气 与 动化工程学院 ,天津 3 0 7 ) 0 0 2
摘 要 : 联 无刷 双馈 电机 以 其 无 电刷 所 带 来 的 系统 稳 定 性 的 提 高和 可 实现 变速 恒频 发 电 等优 点 , 逐 渐 成 为 大 功 级 而
近 年来 , 源 的 稀缺 和生 态 环 境 的 日益恶 化 让 无 资 污染 、 再生 、 持续发 展 的 能源成 为 世 界 各 国研 究 可 可 人员 关 注和 开发 、 利用 的重 点 , 双馈 电机 作 为 大功 率 风 力发 电 的未来 发展 趋势 也 因此 而得 到 了科研 人 员
基于Matlab_Simulink的TMS320F2812代码开发
LEARNiNGGARDEN学习园地l腚基于Matlab/Simulink的、TMS320F2812代码开发一广东工业大学卢,J、锦曾岳南关键词自动代码生成TMS320F2812Matlab/SimulinkRTW代码生成引言随着现代电力电子技术的迅猛发展,兼有高运算速度和强控制能力的DSP在逆变器、电机等电力电子设备的控制领域得到了广泛应用。
通用DSP的源代码开发都可以采用两种方法:一种是直接利用其提供的汇编指令编写源代码,然后经汇编器和链接器进行汇编链接后生成目标可执行代码;另一种方法是利用标准C/C++语言编写源代码,然后经c/c++编译器、汇编器和链接器进行编译链接,最后生成目标可执行代码。
这两种代码开发方法都使得开发人员不得不花费大量的时间在代码的编写上面,增大产品开发难度,延长产品开发周期,从而影响开发效率口]。
MathWorks公司和TI公司联合开发的工具包——MatlabLinkforCCSDevelopmentTools,已经能把Mat-lab和TI公司的DSP集成开发环境CCS(CodeComposerStadiu)及目标DSP连接起来。
利用此工具可以像操作Matlab变量一样来操作TIDSP的存储器或寄存器,即整个目标DSP对于Matlab像透明的一样,开发人员在Mat—lab环境下,就可以完成对CCS的操作。
MatlabLinkforCCSDevelopmentTools可以支持CCS能够识别的任何目标板,包括TI公司的DSK、EVM板和用户自己开发的目标DSP板。
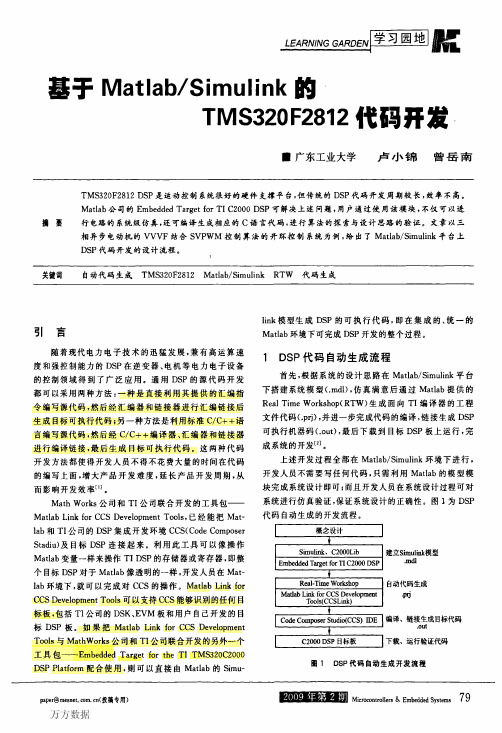
如果把MatlabLinkforCCSDevelopmentTools与MathWorks公司和Tl公司联合开发的另外一个工具包~EmbeddedTargetfortheTITMs320C2000DSPPlatform配合使用,则可以直接由Matlab的Simu-link模型生成DSP的可执行代码,即在集成的、统一的Matlab环境下可完成DSP开发的整个过程。
基于TMS320F2812的通用伺服电机控制系统的设计与实现
Sci ence and Techn Ogy OI Con suli g Her l tn ad
工 程 技 术
基于 T 3 0 2 MS 2 F 8 1 2的通用伺服 电机控制系统的设计与实现
李想 ( 中国电子科技集 团公 司第 5 研 究所 河北石家庄 4
1引言
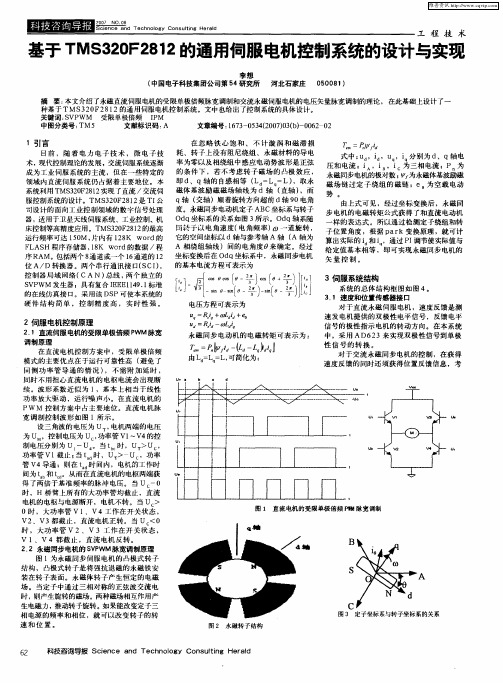
目前 ,随 着 电 力 电子 技 术 ,微 电子 技 术 , 代控制理论 的发展 , 现 交流伺 服系统逐渐 成 为工业 伺服 系统 的主流 ,但在一 些特 定的 领域 内直 流伺服 系统 仍 占据着 主要地 位 。本 系统利用 T 3 0 2 l 实现 了直流 /交流伺 MS 2 F 8 2 服控制 系统的设计 。T 3 0 2 l 是 T 公 MS 2 F 8 2 I 司设计 的面 向工 业控制 领域 的数 字信号 处理 器, 适用于卫星天 线伺服系统 、工业控制、机 床控 制等高精度应用 。T 3 0 2 1 的最 高 M¥ 2 F 8 2 运行 频率可达 l 0 , 内有 l 8 r 5M 片 2 K wo d的 F A H程序 存储器 , 8 r L S l K wo d的数据 /程 序R AM。 包括 两个 8 通道或一 个 l 通 道的 l 6 2 位 A/ D转 换 器。两 个 串行 通讯接 口( C ) S I, 控制 器局 域 网络 ( CAN) 线 , 个独 立 的 总 两 SP V wM 发 生器 ;具有复 合 I E l4 . 标 准 E E 19 1 的在线仿真 接 K。采 用该 D P可 使本系统的 I S 硬 件 结 构 简单 ,控 制 精 度 高 ,实 时 性 强 。
一
_ -( 2 _ s x i - n O
电压 方程可表 示为
U = R i +缸 d+e o
基于TMS320F2812的某控制接口的设计
等 总 线 完 成 对 于 其 它 各 个 模 块 的 管 理 控 制 ,具 有 较 好 的 工 程 应 用 背 景 和 较 强 的 工 程 实 用 价 值 。
摘
要 :信 息 时 代 电 子 产 品 不 断 推 陈 出新 ,模 块 化 设 计 的 产 品 正 在 不 断 涌 现 。 对 于 高 度 模 块 化 的 产 品 而 言 , 其 内 部 各 个模 块 的 协 调 统 一 管理 就 显 得 尤 为 重 要 。针 对 本 公 司 某控 制 接 口 的 整 体 设 计 要 求 ,论 文 即
关 键 词 :模 块 化 ;T S 2 F 8 2;CA 总 线 ;UAL 总 线 M 30 2 1 N 1T 中 图 分 类 号 :T 4 B7 文 献 标 识 码 :A d i 03 6 /.s . 0 - 6 32 1 .3 5 o: . 9 i n1 2 6 7 .0 20 . 4 1 9 s 0 0
第2 5卷 第 3期
21 0 2年 5月
De eo m n & In v t n o c i ey& E e t c lP o u t v lp e t n o ai f o Ma hn r lcr a r d cs i
机 电 产 品 开 发 与 崭
Vo.5, 3 1 2 No. Ma .01 y. 2 2
a e n o t n e n o u e .Ac o d ng t e c g me t f r is i t r a m d l s l c r i o t omp ny a c nto n e fc e i n r q ie nt h s pa e n r u e i d o e i h a o r l i t ra e d sg e u r me ,t i p r I tod c s a k n f d s n g i a o h s c to n e f c .I a e de s f r t i on r l i t ra e tt k sTM ¥ 2 F 81 sm an c tol r 3 0 2 2 a i on r l .Th s c t o n e f c o l t o t n g m e t c to r t e e i on r li t ra e c mp e e t he ma a e n on r l f h o
基于TMS320F2812的数据采集和处理的系统设计
Miir f d ct n T y a 3 0 1C ia h 0sIstt o te it cdmyC I , h o 106C ia n t o E ua o ,  ̄ un0 05 h ; T e6 1 t e fh xhA ae ,ASC Huh t 07 hn) sy i n2 tn i u S 0
1 系统的总体设计
本 系 统 采 用 T 的 3 位 定 点 数 字 信 号 处 理 芯 片 I 2 T 30 2 1 作 为 信号 采 集和 处理 的核心 ,充 分利 用 MS 2F 82
T 3 0 2 1 片 内部 的 l MS 2 F 8 2芯 2位 的 A D模 块 对 数 据 进 /
的主要 因素 ,数 据采集 系统各器件 的定 时关 系是严格 的 , 以确保 系统精度 ,DS P中的定 时 电路和逻 辑控制 电路按
照各个器 件的工 作次序产 生时序信 号和依据 时序信 号产 生逻 辑控 制 信号 。T 3 02 1 芯 片 中集 中了 一个 伪 MS 2F 82 双l 2位 AD转 换器模块 , / 系统通过 事件管理器 ( V E A) 的捕 获单元 ( A ) C P 来捕 获 AD转 换的启动信 号 。 /
出了新 的要 求 。在很 多控制 系统 中 , 求数据 采集模 要
块能够对多个信号通道进行实时,高速的数据采集与高
精 度 的数 据 预 处 理 。数 字信 号 处理 器 ( S ) 出现 和 D P的 广泛 使用 , 好地满足 了数据 采集系统 对于核 心处理器 很
的要 求 。无论从 实时处 理外 部事 件 ( 中断 ,I 的能力 , / O) 还是 对于数据 运算 的速 度和精度 来看 ,数字信号 处理器 都有 非常 大的优 势 。
基于TMS320F2812数字滤波器的设计方法
数据 ( 作 数 ) 乘 的结 果 。此 外 ,MS 2F 82片 操 相 T 30 2 1
内拥 有 高达 1 8 1 2 Kx 6位 的 nAS H程 序存 储 器 , 可
以满 足大 多数情 况下程 序存储 的需 要 。
通常 , 设计一 个基 于 T 3 0 2 1 MS 2 F 8 2的数 字滤 波 器 是繁琐 的 , 我们 利 用 1 公 司提供 的 ft l rr 但 r I ie i ay l rb
2 T 30 2 1 M¥ 2 F 8 2的基本 特点
T 302 1 Ms 2 F 8 2是美国德州 仪器公 司 啊 最新研 制 的一代 3 2位定 点数字信号 处理器(S ) 片, D P芯 主 要面 向逆变器控 制、电机控制等 自动控制 领域 , 可 以很方便地实现诸如 A D采样 、WM输 出、非屏蔽 P 中断 、 脉冲测量等功能 而且 , 由于拥有工作频率达 10 z 3 5 MH 的 2位 D P内核处理器 , 以高效可靠地 S 可 实现诸如 自适 应控 制 、 卡尔曼滤 波和状态控制等 先 进控制技术 。因此 ,M 3 0 2 X系列 D P越来越 T ¥ 2F8 S 成为 自动控制领域 的首选控制芯 片。
阵 运算 、信 号 处 理 和 图 形 显 示 于 一 体 。 利 用 MA L B的强 大运算功能 ,辅助设计 D P应 用程 TA S 序 ,将大 大缩减程 序的开 发时间 :本文研究 了在 T s2F 82 s M 3 O 2 lD P实验 系统 中利用 MA Lt T ̄ B连 接 C S的 功 能 ,以 FR 滤波 器 为 例 ,设 计 了基 于 C 1 MA L B环境的 D P数字滤波。 TA S
为递 归结构 ,对定点处理器的有限字 长更加 敏感 , 会产生更多 的舍人噪声 , 易出现 振荡。但对于一个 给定 的响应 , H 相比较 。 与 R 对存 储空 间的要求少
基于DSP TMS320F2812的控制系统设计
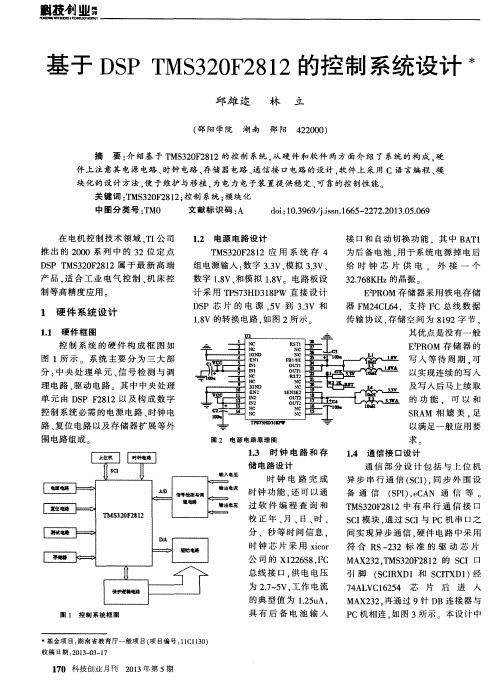
时 钟 电 路 完 成
时钟功能 . 还 可 以通
过 软 件 编 程 查 询 和 校 正年 、 月、 日、 时、
分 、秒 等 时 间信 息 .
时钟 芯 片采 用 x i c o r 公 司 的 X1 2 2 6 S 8 . I 2 C 总线 接 E 1 . 供 电 电压 为2 . 7 5 V. 工 作 电流 的 典 型值 为 1 . 2 5 u A.
基于 D S P T MS 3 2 0 F 2 8 1 2的控 制 系统 设计
米
邱 雄 迩 林
( 邵 阳 学院 湖 南 邵阳
摘
立
4 2 2 0 0 0 )
要: 介 绍基 于 T MS 3 2 0 F 2 8 1 2的控 制 系统 , 从 硬 件 和 软 件 两 方 面介 绍 了 系统 的 构成 , 硬
l
'
控 制 系 统 的 硬 件 构 成 框 图 如
辩
I C
疑 S l 鸳
NC
l
E 2 P R 0 M 存 储 器 的 写 人等待周 期 . 可 以实现 连续 的写人
及 写入 后 马上续 所 示 系统 主 要 分 为 三 大 部
D S P芯 片 的 电源 . 5 V到 3 _ 3 V 和
D S P T MS 3 2 0 F 2 8 1 2属 于 最 新 高 端 产品, 适 合 工 业 电气 控 制 、 机 床 控 制 等高 精度 应用 。
给 时 钟 芯 片 供 电 . 外 接 一 个
3 2 . 7 6 8 K Hz 的 晶振
£ m
船 l N C E 弭
0W l
基于TMS320F2812的某型弹载计算机的开发

基于TMS320F2812的某型弹载计算机的开发针对制导炮弹的信息实时处理要求,从硬件和软件两个角度分析和探讨了弹载计算机在设计时需要达到的总体目标,并开发了以TMS320F2812为核心的某型弹载计算机系统。
标签:弹载计算机DSP TMS320F2812 测试0 引言弹载中央信息处理器系统是各类制导弹箭的重要组成部分。
随着微电子技术和计算机技术的高速发展,适用于数字信号处理的DSP芯片的集成度越来越高,单个芯片上集成了多种外设接口。
这使其成为最具性价比的弹载中央处理器之一。
1 TMS320F2812的主要特点[1]TMS320C2000系列是美国TI公司推出的最佳测控应用的定点DSP芯片。
TMS320F2812是TI公司推出的2000系列性能最高的一款芯片,也是目前国际市场上最先进、功能最强大的32位定点DSP芯片。
它既具有数字信号处理能力,又具有强大的事件管理能力和嵌入式控制功能,因此特别适用于弹载计算机集成度要求高,环境恶劣的场合。
2 弹载计算机硬件平台设计2.1 弹载计算机硬件设计总体要求。
根据某脉冲制导炮弹信息实时处理的要求,设计时要求弹载计算机具有以下主要功能:①至少两路的高精度的AD采集通道,外部同步信号触发方式实现导引头电压信号的同步采集,通过计算来判断弹体当前的偏差角和旋转角。
②具有RS232接口,以便于连接PC机用于数据的导出和检测调试。
③具有多个软件可设定的I/O口,以便对导引头进行启动,发动机点火信号,以及外部信号的反馈输入等。
④具有精确的定时器、“看门狗”以及电源监视能力。
⑤具有断电数据的保存功能。
2.2 弹载计算机结构组成弹载计算机的硬件结构图如图1所示。
时钟电路采用30M外部四角卧式有源晶振,经过载试验验证,卧式晶振在高过载情况下的抗过载能力远高于立式晶振。
由于TMS320F2812内含有最高可达10倍的PLL锁存器,所以可直接接30M晶振,通过内部10倍频后2分频得到TMS320F2812能支持的最高工作频率150MHz。
基于TMS320F2812的智能电动执行器控制系统设计
3 h n zo n tueo c arnc n ie r g Ch n z o 1 14, hn ) .C a gh u Isi t fMe h to isE gn ei , a gh u2 3 6 C ia t n
并给 出 了软件 设计 方 法 , 出 了直流 无刷 电机 速度 调 节和 阀 门4  ̄ * 独 立控 制 的策 略 。初 步 实验 结 提 AK , I
果表 明 : 所提 出的控 制 策略 能 够使 阀 门平稳 、 靠的运行 , 可 实现 了阀 门位置 的精 确控 制 。
关键 词 :MS 2 F 8 2 速度 调 节 ; 置控 制 T 30 2 1 ; 位 中图分类 号 :P 7 . 文献 标 识码 : T23 1 A 文章 编 号 :0 0—8 2 (0 0 1 0 5 0 10 8 9 2 1 )0— 0 5— 4
vd d. e h r wa ec r uto o to y tm sd sg e nd t e s f r e i n a r a h i ie . e c n r l i e Th a d r ic i fc n r ls se i e i n d a h o wa e d sg pp o c sgv n On o to t sr t g b u h p e fb us ls t ra d t o iin o av o to n e e d n l sp s d. e r - tae y a o tt e s e d o r h e sDC moo n hep sto fv l ec n r li d p n e ty i o e Th e
基于TMS320F2812振动信号采集系统的设计与开发
中图分 类号 : T H1 6 ; T G 6 5
第 9期
2 0 1 3年 9月
组 合 机 床 与 自 动 化 加 工 技 术
M o du l a r Ma c hi n e To o l& Aut o ma t i c M a n uf a c t u r i n g Te c hn i que
NO. 9
S e p. 2 0 2 2 6 5 ( 2 0 1 3 ) 0 9— 0 0 8 5—0 3
基于 T M S 3 2 0 F 2 8 1 2振动信号采集 系统 的设计 与开发 术
武振 昕 , 敖银辉 , 曹 斌
( 广 东工 业大 学 机 电工程 学 院 , 广州 5 1 0 0 0 6 )
摘要 : 文章 对机械 振 动信 号采 集 的方 法进 行 了研 究 , 提 出 了一种 基 于 T MS 3 2 0 F 2 8 1 2振 动 信 号采 集 系 统 的设 计 与开发 方 案 。该 系统是 一 种 快速 、 实时性 高、 稳 定 高效 的 振 动信 号采 集 系统 。 它采 用 D S P 芯片 T M ¥ 3 2 0 F 2 8 1 2实现 对振 动信 号 实时采 集处理 , 文章 主要 包括 该 系统 的 组 成 与结 构 、 振 动信 号调 理 电路 的设 计 、 控制 参数 的设 置 和 实现 A / D采 样 的程 序 流 程 等 , 通 过 串 口将数 据 传 到 上 位 机 , 由上
tms320f2812定时器程序

tms320f2812定时器程序#include "DSP281x_Device.h" // DSP281x Headerfile Include File#include "DSP281x_Examples.h" // DSP281x Examples Include File// Prototype statements for functions found within this file.interrupt void cpu_timer0_isr(void);#define LEDS *(int *)0xc0000#define CTRGR *(int *)0x108000#define CTRLCDCMDR *(int *)0x108001#define CTRKEY *(int *)0x108001#define CTRLCDCR *(int *)0x108002#define CTRCLKEY *(int *)0x108002#define CTRLCDLCR *(int *)0x108003#define CTRLCDRCR *(int *)0x108004#define CTRLA *(int *)0x108005#define CTRLR *(int *)0x108007int i=0,nCount;unsigned int uLBD;void main(void){unsigned int uPort8000;InitSysCtrl();//初始化cpuDINT;//关中断InitPieCtrl();//初始化pie寄存器IER = 0x0000;//禁止所有的中断IFR = 0x0000;InitPieVectTable();//初始化pie中断向量表EALLOW; // This is needed to write to EALLOW protected registersPieVectTable.TINT0 = &cpu_timer0_isr;//指定中断服务子程序EDIS; // This is needed to disable write to EALLOW protected registersCpuTimer0.RegsAddr = &CpuTimer0Regs;// Initialize timer period to maximum:CpuTimer0Regs.PRD.all = 0xffff;// Initialize pre-scale counter to divide by 1 (SYSCLKOUT):CpuTimer0Regs.TPR.all = 0;CpuTimer0Regs.TIM.all = 0;CpuTimer0Regs.TPRH.all = 0;// Make sure timer is stopped:CpuTimer0Regs.TCR.bit.TSS = 1;CpuTimer0Regs.TCR.bit.SOFT = 1;CpuTimer0Regs.TCR.bit.FREE = 1;// Reload all counter register with period value:CpuTimer0Regs.TCR.bit.TRB = 1;CpuTimer0Regs.TCR.bit.TIE = 1;// Reset interrupt counters:CpuTimer0.InterruptCount = 0;StartCpuTimer0();//启动定时器0// Enable CPU INT1 which is connected to CPU-Timer 0:IER |= M_INT1;// Enable TINT0 in the PIE: Group 1 interrupt 7PieCtrlRegs.PIEIER1.bit.INTx7 = 1;// Enable global Interrupts and higher priority real-time debug events:EINT; // Enable Global interrupt INTMERTM; // Enable Global realtime interrupt DBGMCTRGR=0; // 初始化ICETEK-CTRCTRGR=0x80;CTRGR=0;CTRLR=0; // 关闭东西方向的交通灯CTRLR=0x40;// 关闭南北方向的交通灯uPort8000=CTRCLKEY;while ( 1 ){}}interrupt void cpu_timer0_isr(void){ int j,k;//CpuTimer0.InterruptCount++;// Acknowledge this interrupt to receive more interrupts from group 1PieCtrlRegs.PIEACK.all = PIEACK_GROUP1;CpuTimer0Regs.TCR.bit.TIF = 1;CpuTimer0Regs.TCR.bit.TRB = 1;if ( nCount==0 ){LEDS=uLBD;uLBD++; uLBD%=16;}nCount++; nCount%=194;}//===================================== ====================================== // No more.//===================================== ===。
基于TMS320F2812数据采集系统的设计

、
一
墨
…
i
l
; !
i
性 作 某 种 近 似 的 基 础 上 的 。 些 近 似 的 方 法 有 窗 这 函数 法 、 率 抽 样 法 及 最 佳 一 致 逼 近 法 。文 中用 频 的是 窗 函 数 法 。
与结果验 证 。
图4 FI 滤 波 器 的 频 谱 R
0.04 0.05 0. 0 0. 88 0 8 0 9 0 72 00 0. 0 0. 24 O. 4 0. 65 01 5 01 01 4 01 0 30 0. 8 0.20 0. 2 0. 2 2 0l 7 0 9 05 0. 2 3 0 7 0. 9 0.31 0. 3 02 2 0 0 0 27 0. 3 0. 3 3 0 41 0 5 0.36 0. 3 0 3 07 0. 3 4 0 7 0. 7 0. 7 0. 3 03 5 03 4 07 0. 3 3 0 6 0. 5 0.3 0. 3 03 3 0 41 0 27 0. 31 0 0. 2 03 0. 2 2 0 9 0.27 0. 25 0 3 0 2 0. 2 9 0 0 0. 8 0. 6 01 7 01 5
对 于 FR 系统 的单位 采样 响应 , 系数 (1 I 其 为:
, 、
f 0 n N h,<<
t其 o 它 ,
一
.
I . . _. - … . lI I ● … -_
畔 :r l ’ 叩-_ _
在 实 际应 用 中 , 于 输 入 信 号 为 () 经 过 对 凡, FR 滤 波 的输 出信 号 y 为 : I ()
C
\
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
盟垫丝盘查塑基于T M S320F2812定点库函数设计张萍(中国空空导弹研究院控制所,河南洛阳471000)摘要:目前一些新型号的研制都采用高端计算机,如T M S320F2812计算机。
现行研制的某型号空空导弹陀螺采集周期短,且自动驾驶仪等算法逐渐采用新的设计方法如插值运算,使得计算量变大,占用了大量的时间,造成机时紧张。
为了提前做好第二方案准备,为将来优化机时打下基础,提出了编制基于TM S320F2812的定点库函数。
库函数的编制有两种设计方法:C语言和汇编语言。
C语言可读性强,但效率较低。
鉴于提高机时的目的,采用计算效率比较高的汇编语言来进行编程。
该定点库函数是由F2812汇编语言按照一定的算法编制而成,包括单字定点数学函数,双字定点数学函数以及单双字向量计算函数。
并通过单元测试和集成测试,对此定点库函数的性能和可靠性进行了验证。
关键词:TM S320F2812:寄存器:定点库函数1T M$320F2812硬件结构T M S320F2812的中央处理器(C PU)的功能是控制程序流程和指令处理。
它实现算术、逻辑、乘法和移位运算。
在进行有符号的数学运算时,C PU按2的补码处理。
1.1C P U结构T M S320F2812具有一个中央处理器(C Pu),仿真逻辑以及与内存和外设交互的信号。
这些信号中包括三条地址总线和三条数据总线。
C PU主要包括:程序和数据控制逻辑、实时仿真和显示、地址寄存器算法单元(A R A U)、算术逻辑单元(A Lu)、预取队列和指令解码、程序和数据的地址生成器、定点M PY/A LU和中断处理。
1.2C PU寄存器’1.2.1累加器(A C C,A H,A L)累加器(A C C)是T M S320F2812提供的一个主要寄存器。
除了直接在内存或者寄存器中进行的操作,其他所有A L U操作的结果都送到A C C中。
A C C支持单循环的转移、加法、减法和比较操作,它还可以来存贮乘法运算的32位结果。
A C C可以分成两个独立的16位寄存器:A H(高16位)和A L(低16位)。
1.2.2被乘数寄存器(x可被乘数寄存器(】(T寄存器)主要用来存储32位乘法操作之前的一个32位有符号整数。
X T的低16位称为11L寄存器。
这个寄存器用来存储一个16位数,并自动进行符号扩展存在X T寄存器中。
X T的高16位称为T寄存器,它主要来存储16位乘法之前的16位整数。
1.2.3乘寄存器(P,PH,PL)乘寄存器(P寄存器)通常被用来存储32位乘积。
它也可以来直接存储16位或32位的数据存储地址,16位的常数,32位A CC,16位或32位的可编址C PU寄存器。
P寄存器可被视为一个32位寄存器或者两个相互独立的16位寄存器:PH(高16位)和PL(低16位1。
1.2.4堆栈指针(SP)通过堆栈指针(SP)可以对数据存储器的软堆栈进行访问。
sP只有16位而且只能对数据空间的低64K进行编址。
当使用SP时,32位地址的高6位被强迫置0。
重置后,SP指向地址O x00000400。
1.2.5辅助寄存器(X A R0一X A R7,A R0一A R7)C PU提供了8个32位的寄存器(X A R0一X A R7),可以用来指向内存或者用作通用寄存器。
许多指令都允许访问X A R0一X A R7的低16位,它们可以用作循环控制和进行16位比较的通用寄存器。
当访问A R0一A R7时,辅助寄存器的高16位(A R O H—A R7H)可以修改也可以保持不变,这取决于所使用的指令。
A R O H—A R7H只能作为X A R0一X A R7的一部分来访问,而不能单独访问。
2函数调用规则C在调用函数时有很严格的规则。
除了一些特殊的函数,其他任何调用C的函数或是被c调用的函数都必须遵循这些规则。
否则,将破坏C的运行环境,导致程序运行失败。
函数的调用以及被调函数的响应的规则请参考([1】)。
3定点库函数设计定点库函数是由F2812汇编语言按照一定的算法编制而成,基本实现嵌入式软件计算中所需要的基本运算函数,包括单字的定点数学函数,双字定点数学函数以及向量计算函数等。
与用c语言编写的库文件相比,具有占用资源少,运算速磨陕的特点。
是专门为定点运算编制的程序。
在函数编写过程中,值得注意的一点是变量的存储,这关系到如何在寄存器或是堆栈中正确的定位变量。
通常情况下,变量存放在累加器A C C、辅助寄存器X A R4和X A R5以及堆栈St ac k 中。
若是使用堆栈存储变量,要在函数开始时通过修改sP值为这些变量划出一定的空间。
3.1乘法函数3.1.1乘法函数组成乘法函数包括:带取整的单字乘法(_f m ul),不带取整的单字乘法(_f m ul0),得到双字长形结果的小数的单字乘法函数(_fm ul2);双字长小单位数的双字乘法函数(_l fm ul),小于双字的定点数的双字近似乘法函数(_l f m ul0),小于双字长的数与小于单字的近似乘法函数(,_If m ul l)。
3.1.2乘法函数原理F2812使用了一个可以进行16"16位和32*32位定点乘法的硬件乘法器。
F2812乘法器能够进行16"16位的乘法,生成一个有符号或无符号的32位乘积。
乘法器接受两个16位的输入:(1)其中一个输入是T寄存器的高16位;(2)另一个输入来自数据存储单元或寄存器(由用户在乘法指令中指定),或是一些F2812乘法指令允许用户使用的常数。
在两个数相乘之后,根据所使用的特定的乘法指令,32位结果存放在32位的乘积寄存器或者32位的累加器A CC。
根据PM值进行左移,对于实现小数运算或小数乘积的调整是非常有用的。
乘积左移一位可用来删除两个16位符号数相乘后多余的符号位。
F2812中32*32位定点乘法运算:(1)第一个输入来自程序存储单元,或32位的被乘寄存作者简介:张萍(1980年一),女,河南洛阳人,助理工程师,硕士,研究向:系统算法与飞控软件设计。
2008年第8期3器O C T)。
(2)另一个输入来自数据存储单元或寄存器(在乘法指令中指定)。
两个数相乘之后,64位结果的32位存储在P寄存器。
用户可以选择要存入的部分(高32位或低32位),也可以根据所使用的指令选择是有符号乘或无符号乘。
3.2平方函数3.2.1平方函数组成平方函数包括:定点数单字长数的平方计算函数(-』2pow),定点数双字长数的平方计算函数C l f2pow)。
3.2.2平方函数原理f2pow函数中使用了SQ RA这条指令,它将P寄存器的内容左移PM位后加到A C C中,然后把x装入T寄存器,X的平方装入P寄存器。
SQ RA(平方/加)和SQ R S(平方/减)指令为了对数据存储器中的数值求平方把相同的值送到乘法器的两个输入中。
_l f2pow函数中引用了A SM中的双字长数乘法,即$l f而ul 函数。
3_3开方函数3.3.1开方函数组成开方函数主要就是小单位数的求方根计算函数_f8qrt。
3.3.2开方函数原理小单位数的求方根计算函数(-_f s qn)。
该函数采用对该函数求泰勒级数的方法求得,Y=“(“}x+a3)+x+a2)4x+a1)+x+a0且o=<x<l。
将f0,1)K间分成若干个子区间,在每个子区间内进行泰勒级数的展开,来选取相应的系数a0,a1,a2,a3,a4。
3.4除法函数3.4.1除法函数组成除法函数包括:带取整的单字除法计算函数(j di v),不带取整的单字除法计算函数(jdi vO),双字长定点数除法函数(-l f div),双字长定点数近似除法函数U岫vo)。
3.4t2除法函数原理在TM S320F2812上实现单字除法是用特殊的条件减SU B C U重复来实现的。
给出16位正除数和正被除数,重复16次SU B C U命令,在累加器低位产生16位商,而余数在累加器高位。
SU B C U所执行的二进制除法与通常所进行的长除法相同,将被除数移位直至减除数不再产生负结果。
对于不产生负结果的每次减,“1”放人商的最低位,然后移位。
在每次减后进行移位产生的余数和商分别在累加器的高、低半部。
当用SU B C U命令时,被除数和除数必须为正,且除数小于移位被除数的状态是有结果的符号来决定。
因此必须确定商的符号,并且使用被除数和除数的绝对值来计算商。
3.5转换函数3.5.1转换函数组成转换函数是指F2812计算机工作程序中从f i xed小数到l f i xed双字长形小数的转换和逆转换函数,包括从l f i xed小数到fi xed的转换L且x),从fi xed小数到l fi xed的转换(_1f i x)。
3.5.2转换函数原理(1)_f i x:当输入的低16位的最高位为1时,由于取整的原因,得到的输出是输入的高16位加1,当输入的低16位的最高位为0时,得到的输出是输人的高16位;(2)一l fⅨ:该函数的功能是把单字的输入转换为双字,因此输出为输入的字放到高位,其低位置0,没有误差产生。
3.6三角函数3.6.1三角函组成三角函主要包括:小单位的正弦计算函Lf s i n),小单位的余弦计算函(j÷os),定点的反正弦计算函(_f as i n)。
43.6.2三角函数原理’(1)_fs i n:采用对正弦函数求泰勒级数的方法求得的,Si nx=(( (c71"x*'2+c51)$x肆c$2+c31){x‘"2+c l1)*x+c12*x且一1=<x<l。
当对一个角度求正弦时,首先把它化为在『_pi/2,pi/2)范围内,然后除以pi/2,放入函数_fs i n中调用;(2)_feos:利用正弦函数求得的;(3)_f asi n:采用对反正弦函数求泰勒级数的方法求得的,as i nx=(“a4木x+a3)木x+a2)枣x+a1)球x+a0且-l=<x<l。
3.7加法溢出检查函数F2812计算机工作程序中定点数的复合字溢出检查函数_over add,该函数检查输入数据之和是否溢出,当输入数据之和的绝对值大于最大数7f f f时,输出为1,否则为零。
3.8向量函数3.8.1向量函数组成向量函数是F2812计算机工作程序中的坐标向量与四元数的运算(文件中描述操作中用到的向量、四元数及函数)。
向量函数包括:(1)单字向量函数:矢量乘法函数(,fvem ul)、矢量与标量相乘的函数(f vs m ul)、向量修正函数(_fvcor)、向量积函数(_fvvm ul)、标量积函数(_fs vm ul)、“不等于”比较函数(_f vneq)、大于标量比较函数∽g呐、小于标量比较函数(_f vl st);(2)双字向量函数:向量相加函数∞add)、向量相减函数c.-Ⅱvsub)、元素加函数Ufl rea dd)、归零函数(_l fvnul)、次位字规零时首位字取整函数(_l f vm d)、向右移位函数(_l fvs hr)、向左移位函数∞shl)、单项乘法函数∽em ul)、与标量相乘函数(__lfvsm ul)、单项增加标量函数∽sadd)、向量积函数(_l fvvm ul)、标量积函数(_l fs vm ul)、精确修正向量函数(_f f veor)、绝对值单项计算函数C l f vabs);(3)四元数的首位字“不等于”比较函数Ct kneq);(4)换算函数:单字向量换算为双字向量函数(_J f vCO nY)、双字向量换算为单字向量函数(f vconv)。