基于Baidu地图的移动机器人监控平台
基于地图的移动机器人定位技术新进展
Abs r t Thi pa e s ve e t c r e t e e r h s on he obie ob l a ia i tac : s p r ur y d he u r n r s a c e t m l r ot oc lz ton, s um m a ie t rz d he c us ofunc r a nte a e e t i is durn he po ii ng pr c s i g t s toni o e s, a d c a s fe he ur e t e ho w ih he ap n l s iid t c r n m t ds t t m s t y us nd h e h ol gy i hih t y de uc ih t i a e m pls dic s d. I p n e o he he e a t e m t od o n w c he d e w t yp c l xa e s us e t oi t d ut t c om m o oblm sc n pr e onfon e ih by m os e ho r t d w t tm t ds,a d t ut e t e d w ih s n he f ur r n t om e s gg s i n t m e — u e to o do s tC r s a c e s i e e r h r . Key wor s: m o l ob ; l c iz to d bie r ot o a ia i n; un e t i i s;s ns c r ante e or;m a p
一种基于环境监测移动机器人定位的新方法
Microcomputer Applications V ol.27,No.6,2011研究与设计微型电脑应用2011年第27卷第6期文章编号:1007-757X(2011)06-0007-03一种基于环境监测移动机器人定位的新方法胡彬摘要:针对移动机器人在复杂动态环境下的定位问题,提出了对环境的复杂程度进行实时监测的新方法。
在定位算法中加入了环境监测的反馈项,根据环境的复杂情况实时调整定位算法,减小了粒子滤波(PF)定位算法对环境不确定性的敏感度,提高了算法的鲁棒性。
环境监控模块以粒子分布状态为输入,不必添加其他传感器用以单独判断拥挤的情况,算法简单,易于实现。
电动智能轮椅的实验结果,表明了所提方法的有效性。
关键词:移动机器人;复杂动态环境;定位;粒子滤波;环境监控中图分类号:TP311文献标志符:A0引言移动机器人定位,包括机器人的位置与方向的确定,是在已知环境下机器人完成其他自主任务的前提,是移动机器人的关键技术之一[1]。
机器人定位是移动机器人的根基,在充满不确定性的环境中,只有机器人知道自己的精确位置,才能真正实现自主。
目前,通用的定位技术包括卡尔曼滤波KF(Kalman Filter)[2],扩展卡尔曼滤波EKF(Extended Kalman Filter)[2],马尔可夫定位MKVL(Markov Localization)[3],地图匹配定位[4]和粒子滤波PF(Particle Filter)[1]等等。
经典的卡尔曼滤波器虽然可以很好的解决移动机器人的位姿估计问题,但是由于卡尔曼滤波需要系统为线性且满足高斯分布,而许多动态系统和传感器模型是非线性的,因此很难在实际应用中得到广泛的应用。
扩展卡尔曼滤波器将输入方程和输出方程进行线性化,而后进行估计,虽然可以解决非线性预估问题,但是它仍然要求系统满足高斯分布条件,也存在一定的局限性。
Fox等[3]成功实现了马尔可夫定位算法,解决了机器人在动态环境下定位的导航与避障等问题,但是该算法计算量太大,要求储存机器人的位置概率信息,计算复杂度会随着空间维度指数级递增,因此很难应用于高维度的状态空间。
以百度地图为例,对地图产品的应用场景进行分析

一、地图标注各种to B的产品中有很多展示地理位置的场景,而这些都需要在后台预先设置好。
简而言之,该场景下的操作就是选择正确的位置并进行保存,核心操作包括搜索和标记。
搜索:输入关键词,点击suggest提供的内容或者直接输入关键词点击按钮进行搜索。
因为suggest的展示不够直观,只能在下拉列表中展示;输入关键词后搜索在地图上直观的看到分布情况无疑更为合适。
是实际应用中一般是将两者结合使用。
标记:鼠标单击地图上的点或者拖拽预设置的当前城市中心点。
这两种操作其实是相互辅助的,有些时候地理位置错误或者不存在就需要拖拽中心点这种方式来修正。
当然点击suggest提供的内容其实也算是一种标记,这个时候会覆盖掉之前选择的位置点。
二、周边配套这种场景在房产行业的使用尤为突出,调用地图接口来显示周边配套信息,数据相对准确,体验上也更友好。
该场景下涉及到地图的功能点也比较多,包含了诸如关键字检索、信息窗口显示、缩放拖拽地图等功能点。
产品经理更多关注的是以下方面:配套类型和排序;右侧列表的排序规则、展现数量、默认和选中样式;地图上POI和右侧列表联动的交互;地图是否支持拖拽和缩放;如何快速查找周边地理位置和规划出行路线等。
以上这些都需要产品经理对地图产品有深入的了解。
三、全景地图全景地图是指把三维图片模拟成真实物体的三维效果的地图,浏览者可以拖拽地图从不同的角度浏览真实物体的效果。
全景地图目前还存在一定的滞后性,很多地方也没有全景信息,相信这些也是地图厂商需要发力的地方。
另外全景和VR结合也很具有发展潜力和想象空间,甚至有可能是一次全新的变革。
全景地图和普通地图的切换需要重点考虑,如何在选择一种类型后引导用户按照原路径返回对于体验非常重要。
不同场景下的地图产品使用是一件很复杂的事情,产品经理需要在使用中不断的总结,完善知识体系,同时需要对地图产品的API平台和解决方案保持关注,这样设计出来的产品才能更具有竞争力。
bmap trackanimation 原理 -回复
bmap trackanimation 原理-回复bmap.trackanimation原理bmap.trackanimation是百度地图API中的一个功能,它可以用于在地图上展示一个实时的移动轨迹动画。
该功能很适合用来展示车辆或者人员的实时位置,比如,可以用于展示出租车的行驶路径,或者物流车的运输路线等。
在本文中,我们将一步一步地回答关于bmap.trackanimation 功能的原理。
1. bmap.trackanimation的基本原理bmap.trackanimation的基本原理是利用百度地图的JavaScript API,通过设置一个路径数组,然后根据路径数组中的点逐步更新地图上的标注位置,从而形成一个实时的移动轨迹动画。
该路径数组可以包含多个点,每个点都具有经纬度信息和标注内容。
通过不断更新标注的位置,就可以实现一个实时的移动效果。
2. 动画的控制和设置bmap.trackanimation提供了一些方法来控制和设置动画效果。
其中,最重要的方法是start()和stop()方法,分别用于开始和停止动画。
此外,还可以设置动画的速度、图标、标注样式等。
3. 数据的准备和传入在使用bmap.trackanimation功能之前,首先需要准备好所需的轨迹数据,并传入到地图API中。
轨迹数据一般以JSON格式存储,包含了点的经纬度信息和标注内容。
可以通过后端接口或者数据库等方式获取轨迹数据,并将其解析为JavaScript对象或数组。
4. 动画实现的步骤一般来说,使用bmap.trackanimation功能实现动画效果的步骤可以分为以下几个步骤:- 创建地图实例并设置中心点和缩放等级。
- 创建一个轨迹动画对象,并设置动画的相关属性。
- 创建一个标注图标,并设置图标的样式。
- 解析轨迹数据,并将其转换成百度地图的点对象。
- 将点对象添加到路径数组中,并将路径数组传入到轨迹动画对象中。
- 调用start()方法开始动画,并根据需要设置动画的速度和图标等属性。
基于百度地图API的主动定位研究与实现
<script type=“text/javascript” src=“http:///map/jsdemo/demo/convertor.js”> </script> <script type=“text/javascript”src=“http:///api?v=1.4”> </script&g 1.4 版本.
· 67 ·
4 为团友.导游在 2:25 的位置,位于园内月鉴湖西北处,如图 4 我的位置.导游查看团友 1332 位 置,勾上提醒,点击查找,查得 1332 位于园内入公园牌坊处,并查看到该团友拍摄的实景图,如图 5、图 6.这时团友 1332 手机提醒音乐响起.导游又输入 133*,查得 1332,1333,1334 号团友的实时 位置,如图 7.这种体验,让导游对团友定位了如指掌,在该次带团活动中获得良好体验.
· 69 ·
mp.addControl (new BMap.MapTypeControl ());//添加显示模式 mp.centerAndZoom (new BMap.Point (116.728650288,23.3839084533),16); //预定位,设定显示比例级为 16 级
移动机器人SLAM技术
移动机器人SLAM技术在当今科技飞速发展的时代,移动机器人已经成为了人们生活和工作中的得力助手。
从家庭中的扫地机器人到工业领域的自动化搬运机器人,它们的身影无处不在。
而要让这些机器人能够在未知环境中自由移动、执行任务并准确地感知自身位置和周围环境,就离不开一项关键技术——SLAM 技术。
SLAM 技术,全称为 Simultaneous Localization and Mapping,即同时定位与地图构建。
简单来说,就是让机器人在移动的过程中,一边确定自己的位置,一边构建周围环境的地图。
这就好比我们人类在一个陌生的地方,需要一边记住自己走过的路,一边了解周围的地形和地标,以便能够准确地找到自己的位置和规划下一步的行动。
想象一下,一个扫地机器人在你的家中工作。
如果它不知道自己在哪里,也不清楚房间的布局,那么它很可能会遗漏一些区域或者重复清扫某些地方,无法高效地完成清洁任务。
而有了 SLAM 技术,机器人就能够实时地感知自己的位置,绘制出房间的地图,并根据地图规划出最优的清扫路径,从而提高工作效率和效果。
SLAM 技术的实现主要依赖于多种传感器的协同工作。
常见的传感器包括激光雷达、摄像头、惯性测量单元(IMU)等。
激光雷达通过发射激光束并测量反射回来的时间和强度,可以精确地测量机器人与周围物体的距离和方向,从而构建出环境的三维模型。
摄像头则可以获取丰富的图像信息,通过图像处理和分析来识别物体和特征。
IMU则用于测量机器人的加速度和角速度,帮助确定机器人的姿态和运动状态。
这些传感器采集到的数据通常是大量的、复杂的,并且存在一定的误差和噪声。
因此,如何对这些数据进行有效的融合和处理,是SLAM 技术中的一个关键问题。
目前,常用的方法包括卡尔曼滤波、粒子滤波、图优化等。
这些方法可以对传感器数据进行融合和校正,提高定位和地图构建的准确性。
在移动机器人的实际应用中,SLAM 技术面临着许多挑战。
例如,环境的动态变化,如人员的走动、家具的移动等,会导致地图的不准确和定位的偏差。
百度推出手机地图Android SDK基础地图服务平台全线升级
百度推出手机地图Android SDK基础地图服务平台全线升级闻发
【期刊名称】《中国测绘》
【年(卷),期】2011(000)003
【摘要】记者日前获悉,百度地图API 1.2版本发布.同时推出移动版API服务,支持Android手机地图SDK.百度基础地图服务平台全线升级。
广大位置应用开发者将能够利用其强大的平台支持,为网民提供更丰富.多元.个性的地图应用服务。
【总页数】1页(P87-87)
【作者】闻发
【作者单位】不详
【正文语种】中文
【中图分类】TP311.13
【相关文献】
1.浅谈手机地图产品未来发展方向--基于高德地图和百度地图 [J], 麦世昌;谢小燕
2.基于百度地图API和Android的手机端校园消息发布系统设计与实现——以南
京晓庄学院为例 [J], 陈玲
3.基于百度地图API的智能停车SDK的设计与实现 [J], 邱龙龙;牛强;陈云飞;张军
4.手机地图在"地图的阅读"探研教学中的运用
——以百度地图APP为例 [J], 吴孟宇;贺志康
5.基于百度地图SDK的代驾平台LBS实时监测系统 [J], 任健
因版权原因,仅展示原文概要,查看原文内容请购买。
《2024年基于ROS的小场景移动机器人设计与实现》范文
《基于ROS的小场景移动机器人设计与实现》篇一一、引言随着科技的进步,机器人技术得到了广泛的应用和深入的研究。
其中,移动机器人在各种场景中发挥着越来越重要的作用。
本文将介绍一种基于ROS(Robot Operating System)的小场景移动机器人的设计与实现。
该机器人适用于特定的小范围环境,如家庭、工厂内部等,能够完成自主导航、避障、物品搬运等任务。
二、系统概述本系统采用ROS作为机器人开发的框架,结合传感器、电机驱动等硬件设备,实现机器人的运动控制和环境感知。
系统主要由以下几个部分组成:移动平台、传感器模块、控制模块和ROS 软件架构。
三、硬件设计1. 移动平台:采用差速驱动的移动平台,由两个电机驱动,通过编码器获取运动信息。
2. 传感器模块:包括激光雷达、红外传感器、摄像头等,用于实现机器人的环境感知和避障功能。
3. 控制模块:采用微控制器作为核心,负责接收传感器数据,并根据ROS的指令控制电机的运动。
四、软件设计1. ROS软件架构:采用ROS作为软件架构,实现机器人的运动控制和环境感知。
ROS提供了丰富的工具和库,方便开发人员快速搭建机器人系统。
2. 导航与定位:通过激光雷达和编码器数据,实现机器人的导航与定位功能。
采用SLAM(同时定位与地图构建)算法,实现机器人在未知环境中的自主导航。
3. 避障功能:通过红外传感器和摄像头等传感器数据,实现机器人的避障功能。
当机器人检测到障碍物时,会根据障碍物的距离和类型,采取相应的避障策略。
4. 任务执行:通过ROS的节点通信机制,实现机器人的任务执行功能。
开发人员可以根据需求,编写相应的ROS节点,实现机器人的各种任务。
五、实现过程1. 硬件组装:将移动平台、传感器模块和控制模块进行组装,搭建出机器人的硬件平台。
2. 软件开发:在ROS环境下,编写机器人的软件代码。
包括导航与定位、避障功能、任务执行等功能的实现。
3. 测试与调试:对机器人进行测试与调试,确保机器人能够正常工作。
无人驾驶汽车的现状及发展趋势
无人驾驶汽车的现状及发展趋势张耀丹【摘要】无人驾驶汽车属于智能汽车的一种.也可以将其称为轮式移动机器人.它们主要是通过车辆内安装的智能操纵控制系统与感应设备来获取信息用以控制车辆姿态,实现自动安全的行驶.文章简要叙述了无人驾驶汽车的国内外发展历程及现状,展望了无人驾驶汽车未来的一个发展.【期刊名称】《汽车实用技术》【年(卷),期】2018(000)006【总页数】2页(P10,15)【关键词】无人驾驶;现状;趋势【作者】张耀丹【作者单位】陕西国防工业职业技术学院,陕西西安710300【正文语种】中文【中图分类】U471.1前言在过去的十几年,随着经济和城市的快速发展,促使城市路况、交通愈加趋于严峻繁杂。
加之由于人为等种种原因世界各国的交通事故频发率逐年上升,而在这些交通事故中造成人员伤亡和财产损失的数字也在逐年攀升。
随着科学技术的发展,计算机领域的成熟。
设计师于是提出无人驾驶汽车。
无人驾驶汽车属于智能汽车的一种。
也可以将其称为轮式移动机器人。
它们主要是通过车辆内安装的智能操纵控制系统与感应设备来获取信息用以控制车辆姿态,实现自动安全的行驶。
无人驾驶汽车在技术上其实就是一种集自动控制、人工智能、体系结构、视觉设计等众多技术于一体的,依靠着计算机系统的智能驾驶仪。
是计算机科学和智能控制技术高度发展的产物。
1 无人驾驶的现状无人驾驶最初由欧美等汽车工业与科技技术先进的发达国家提出并进行研究,并在它的实用性及可行性方面取得突破性的进展。
如今越来越多汽车厂商和科技巨头把焦点放在无人驾驶汽车领域,最为著名的是由科技巨头谷歌公司所研发的无人驾驶汽车,该项目是由任职于斯坦福大学人工智能实验室的主任塞巴斯蒂安-特龙担任谷歌工程师,同时塞巴斯蒂安-特龙还创造谷歌街景地图服务。
2009年至今,谷歌无人车在自动驾驶模式下已经累积行驶达228.5万公里,而通过手动受控驾驶已经累计行驶159.2万公里。
目前,这个数字还在以每周1.6—2.1万公里的速度在增长。
物联网场景下的移动机器人自主导航研究
物联网场景下的移动机器人自主导航研究物联网(Internet of Things, IoT)在当今社会的发展中发挥着越来越重要的作用,它将物理世界与数字世界相互连接,将各种设备、传感器、数据库等相互联通。
移动机器人(Mobile Robots)是一种在物联网中应用广泛的设备,它具有可移动性、自主决策能力、多功能等特点,可应用于诸如物流、安防、医疗、教育等多个领域。
移动机器人自主导航是其核心功能,随着物联网技术的不断发展,自主导航技术也在不断提升。
一、移动机器人自主导航技术的发展历程与现状移动机器人的自主导航技术源于20世纪70年代,当时的自主导航智能机器人主要应用于军事领域和科学研究,随着移动机器人的应用领域不断扩大,自主导航技术逐渐成熟。
目前,移动机器人的自主导航技术主要包括三类:基于传感器的导航、基于定位的导航和基于地图的导航。
基于传感器的导航技术主要是通过对环境中的障碍物和物品进行探测,利用传感器获取环境信息,并通过自身的算法进行分析、决策和规划路径,实现自主导航。
该方法依赖于传感器的准确性和稳定性,因此相对较为复杂和耗时。
基于定位的导航技术主要是通过利用GPS、惯性导航等技术,确定移动机器人的位置和姿态,并结合环境信息进行路径规划和导航。
该技术具有定位精度高、时间成本低等优点,在室外环境下应用广泛,但在室内或复杂环境下,定位精度较低。
基于地图的导航技术则是在机器人的内存中存储环境地图,在移动过程中进行实时定位和路径规划,可以应对不同环境下的自主导航需求。
该技术依赖于环境地图的准确性和更新速度,也需要在机器人上配备相应的计算资源。
目前,各种自主导航技术都有其优缺点,需要根据具体应用环境和需求进行选择和优化。
二、基于物联网的移动机器人自主导航技术研究在物联网的背景下,移动机器人的自主导航技术的研究也受到了影响。
物联网将物理设备与网络进行连接,可以使得移动机器人能够获取更为精准和实时的环境信息,同时也可以使得移动机器人的运动更加高效和智能,提升其自主导航的能力。
基于Android的寻人定位APP——爱守护·老人
基于Android的寻人定位APP——爱守护老人徐冬;曹毅【摘要】本文开发了基于Android系统的定位软件,不需要昂贵的穿戴式设备,不需要双方网络,通过短信传递老人位置信息,并在主控端手机地图界面上对老人所在位置进行标点,极大缩短了寻找时间,同时也极大地减少了老人发生意外的风险.【期刊名称】《数字技术与应用》【年(卷),期】2018(036)004【总页数】2页(P55-56)【关键词】Android;寻人;快速定位【作者】徐冬;曹毅【作者单位】沈阳理工大学信息科学与工程学院,辽宁沈阳 110159;沈阳理工大学信息科学与工程学院,辽宁沈阳 110159【正文语种】中文【中图分类】TP311.521 Android及开发工具简介1.1 AndroidAndroid,翻译为机器人,是一种基于Linux的,自由的,开放源代码的操作系统,大多使用于智能手机和平板电脑等移动设备,由Google公司领导及开发。
Android操作系统最早由Andy Rubin开发,主要用于手机。
后来被Google收购。
随后Google获得Apache开源许可证的授权方式,发布了Android的源代码。
第一部Android智能手机于2008年发布,并迅速取代JavaME。
Android迅速扩展到移动设备及其他领域上,如TV、游戏机、数码相机、平板电脑以及多种穿戴式设备等。
1.2 开发工具Android Studio 是一个Android集成开发工具,基于Java编程软件IntelliJ IDEA.与Eclipse类似,Android Studio 提供了大量的 Android 开发工具及可视化界面控件供开发者使用。
Android Studio使用方便,有很多不同尺寸的屏幕和分辨率标准,根据新的Studio窗口,开发者可以非常方便地调整在不同的设备上的应用,基本可以满足所有人的需求。
同时Studio支持多语言版本(暂无中文版本),支持翻译,使开发者更适应新的开发环境,为开发者提供了方便。
第33届上海市青少年科技创新大赛——创新成果类获奖名单(2018.3)答辩
遥控爬楼机器人
工程(初中) 邓航
机械式输液报警器
工程(初中) 刘沈沛尧
基于arduino视觉处理与连杆传动的智能物联管理分类系 统
工程(初中) 伍佳乐
多功能手套
工程(初中) 李昆曦
基于ArduinoNano的便携式智能杯垫
工程(初中) 徐立修
自供能车载固态冰箱研究
工程(初中) 冯睿阳
有自动报警功能的防盗背包
工程(高中) 肖子聪
出租车行程与发票综合信息系统
工程(高中) 姜海天
消防通道杂物堆放的自动检测提示系统
工程(高中) 康悦
针对花粉过敏的便携式空气净化器的研制
工程(高中) 曹清欢
照片转三维模型在实际生活中的应用优化——快速定制制 作鞋楦方案
工程(高中)
田可
基于用户体验驱动的自行车功能改进研究
工程(高中) 田清扬
超能警示牌
工程(小学) 郭东灿
回收利用空调冷凝水的智能浇花装置
工程(小学) 薛众琛
便携式安全速干斗篷式共享雨衣
工程(小学) 甘子恒
妈妈的厨房之矛---炒菜勺
工程(小学) 潘君儒
“自由手”——残疾人鼠标
工程(小学) 郭家晔
人工智能家用反渗透净水器废水回收利用系统
工程(小学) 林睿怡
基于树莓派和电子标签的智能书包设计
发动机热能回收系统 单轮动力滑板车 一种便携式安全环保的医用输液管加热装置 防溺水救生报警泳帽 资源回收装置新设计 “守护天使”多功能背心 不会吹翻的伞 宠物粪便自动清洁器 导盲杖 基于计算机视觉的小区车辆引导防堵塞系统 电磁感应智能物流分拣分体集群机器人 基于单片机的智能节水淋浴喷头装置 常见家用电器待机节能装置的实践研究 可调节角度的太阳能控光棚 基于手机APP控制的多功能智能枕 老年人防忘关水龙头装置 基于超声波传感器滤波融合的环境感知系统
基于机器视觉的移动机器人导航与定位研究

基于机器视觉的移动机器人导航与定位研究移动机器人导航与定位是机器人领域中一个重要且具有挑战性的问题。
随着机器视觉技术的发展和普及,基于机器视觉的移动机器人导航与定位成为了研究的热点。
本文将从机器视觉的角度探讨移动机器人导航与定位的研究。
一、介绍移动机器人导航与定位是指在未知或部分未知的环境中,通过机器人自身的感知和处理能力,实现机器人在环境中的准确定位和导航移动的能力。
而基于机器视觉的移动机器人导航与定位就是利用机器视觉技术进行环境感知和位置估计,进而实现机器人的导航和定位能力。
二、环境感知机器视觉技术在移动机器人导航与定位中起着重要的作用,通过摄像头等视觉设备获取环境信息。
机器视觉可以识别和跟踪环境中的障碍物、地标以及其他关键特征,从而为机器人提供环境感知能力。
例如,通过对摄像头图像的处理,机器人可以实时地检测出环境中的障碍物,并根据障碍物的位置和大小做出避障决策。
此外,机器视觉还可以识别环境中的地标,通过对地标的识别和跟踪,对机器人的导航提供重要的信息。
三、位置估计机器人的定位是指确定机器人在环境中的具体位置和朝向。
基于机器视觉的移动机器人导航与定位中,可以利用视觉传感器获取的环境信息进行位置估计。
一种常见的方法是使用特征点匹配算法,将环境中的特征点与机器人的局部地图进行匹配,从而估计机器人的位置。
当机器人运动时,通过不断地更新局部地图和特征点匹配,可以实现机器人位置的实时估计。
此外,还可以结合其他传感器信息,如惯性传感器和激光雷达等,来提高位置估计的精度和稳定性。
四、导航规划导航规划是指根据机器人当前位置和目标位置,确定机器人的移动路径。
机器视觉可以为导航规划提供重要的信息。
通过对环境中的地标、障碍物等进行识别和跟踪,可以获取环境的结构信息,从而帮助机器人规划合适的移动路径。
例如,机器人可以利用视觉信息确定离目标位置最近的可行路径,并根据路径上的障碍物信息进行避障策略的制定。
此外,机器视觉还可以提供实时的环境变化信息,如障碍物移动或消失等,从而使机器人能够动态地调整导航路径。
基于ROS的自主导航机器人系统设计与实现
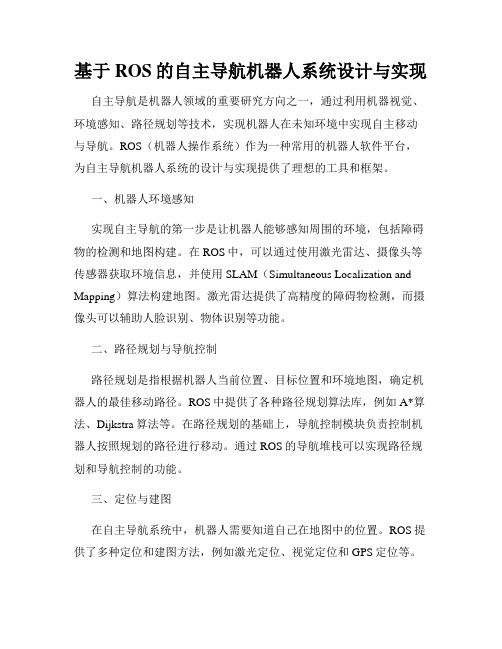
基于ROS的自主导航机器人系统设计与实现自主导航是机器人领域的重要研究方向之一,通过利用机器视觉、环境感知、路径规划等技术,实现机器人在未知环境中实现自主移动与导航。
ROS(机器人操作系统)作为一种常用的机器人软件平台,为自主导航机器人系统的设计与实现提供了理想的工具和框架。
一、机器人环境感知实现自主导航的第一步是让机器人能够感知周围的环境,包括障碍物的检测和地图构建。
在ROS中,可以通过使用激光雷达、摄像头等传感器获取环境信息,并使用SLAM(Simultaneous Localization and Mapping)算法构建地图。
激光雷达提供了高精度的障碍物检测,而摄像头可以辅助人脸识别、物体识别等功能。
二、路径规划与导航控制路径规划是指根据机器人当前位置、目标位置和环境地图,确定机器人的最佳移动路径。
ROS中提供了各种路径规划算法库,例如A*算法、Dijkstra算法等。
在路径规划的基础上,导航控制模块负责控制机器人按照规划的路径进行移动。
通过ROS的导航堆栈可以实现路径规划和导航控制的功能。
三、定位与建图在自主导航系统中,机器人需要知道自己在地图中的位置。
ROS提供了多种定位和建图方法,例如激光定位、视觉定位和GPS定位等。
机器人可以利用这些方法获得自身的准确位置信息,并将其用于导航和路径规划中。
四、机器人交互与控制自主导航机器人系统还需要实现与用户的交互与控制。
ROS提供了丰富的用户界面工具,例如RViz和RQT等,可以以可视化的方式与机器人进行交互。
通过这些工具,用户可以实时监控机器人的状态、修改目标位置,甚至手动控制机器人的移动方向。
五、测试与调试为了确保自主导航机器人系统的有效性和稳定性,需要进行测试与调试。
ROS提供了强大的仿真工具,例如Gazebo和Rviz等,可以方便地进行系统功能测试和性能评估。
通过仿真,可以减少对真实机器人的依赖,提高测试的灵活性和效率。
六、实验验证与应用基于ROS的自主导航机器人系统设计与实现完成后,需要进行实验验证和应用。
《基于ROS的智能移动机器人路径规划算法研究》
《基于ROS的智能移动机器人路径规划算法研究》一、引言随着科技的飞速发展,智能移动机器人在工业、医疗、军事、服务等领域的应用越来越广泛。
路径规划作为智能移动机器人的核心任务之一,其算法的优化与改进对机器人的性能和效率具有重要影响。
近年来,基于ROS(Robot Operating System)的智能移动机器人路径规划算法得到了广泛研究。
本文旨在探讨基于ROS的智能移动机器人路径规划算法的研究现状、方法及未来发展趋势。
二、ROS系统及其在路径规划中的应用ROS是一种为机器人提供硬件抽象、设备驱动、库资源、消息传递等功能的开源软件系统。
在路径规划中,ROS通过提供丰富的工具和库,为智能移动机器人的开发提供了便捷的条件。
在ROS系统中,路径规划算法主要依赖于机器人的传感器数据,结合环境信息,计算出从起点到终点的最优路径。
三、智能移动机器人路径规划算法研究(一)传统路径规划算法传统路径规划算法主要包括基于规则的方法、势场法、栅格法等。
这些算法在简单环境下具有较好的性能,但在复杂环境中,由于缺乏对环境的全局理解,往往难以找到最优路径。
(二)基于人工智能的路径规划算法随着人工智能技术的发展,基于神经网络、遗传算法、强化学习等人工智能技术的路径规划算法逐渐成为研究热点。
这些算法能够根据机器人的传感器数据和环境信息,通过学习和优化,找到最优路径。
其中,强化学习在智能移动机器人路径规划中具有较好的应用前景。
四、基于ROS的智能移动机器人路径规划算法实现(一)环境建模在ROS系统中,环境建模是路径规划的基础。
通过激光雷达、摄像头等传感器获取环境信息,利用ROS提供的PCL(Point Cloud Library)等库进行环境建模。
(二)路径规划算法实现在环境建模的基础上,结合机器人的运动学模型和传感器数据,选择合适的路径规划算法进行实现。
例如,基于A算法、Dijkstra算法等传统算法,或基于强化学习等人工智能技术的算法。
百度地图Android定位SDK
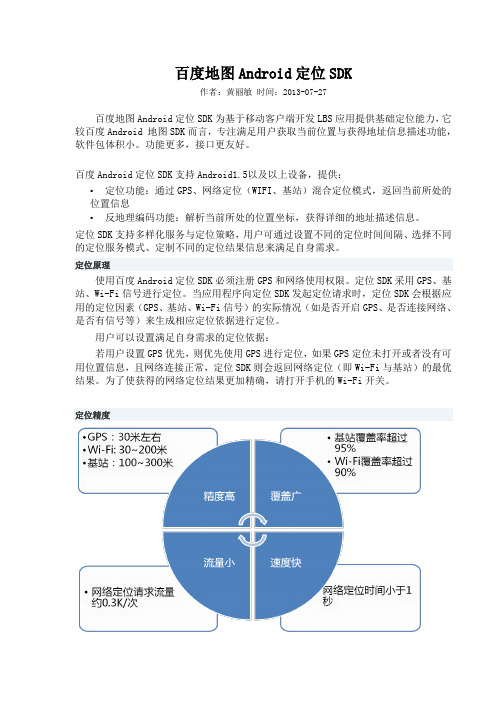
百度地图Android定位SDK作者:黄丽敏时间:2013-07-27百度地图Android定位SDK为基于移动客户端开发LBS应用提供基础定位能力,它较百度Android 地图SDK而言,专注满足用户获取当前位置与获得地址信息描述功能,软件包体积小。
功能更多,接口更友好。
百度Android定位SDK支持Android1.5以及以上设备,提供:▪定位功能:通过GPS、网络定位(WIFI、基站)混合定位模式,返回当前所处的位置信息▪反地理编码功能:解析当前所处的位置坐标,获得详细的地址描述信息。
定位SDK支持多样化服务与定位策略,用户可通过设置不同的定位时间间隔、选择不同的定位服务模式、定制不同的定位结果信息来满足自身需求。
定位原理使用百度Android定位SDK必须注册GPS和网络使用权限。
定位SDK采用GPS、基站、Wi-Fi信号进行定位。
当应用程序向定位SDK发起定位请求时,定位SDK会根据应用的定位因素(GPS、基站、Wi-Fi信号)的实际情况(如是否开启GPS、是否连接网络、是否有信号等)来生成相应定位依据进行定位。
用户可以设置满足自身需求的定位依据:若用户设置GPS优先,则优先使用GPS进行定位,如果GPS定位未打开或者没有可用位置信息,且网络连接正常,定位SDK则会返回网络定位(即Wi-Fi与基站)的最优结果。
为了使获得的网络定位结果更加精确,请打开手机的Wi-Fi开关。
定位精度使用步骤:导入库文件在下载最新的库文件。
将liblocSDK3.so文件拷贝到libs/armeabi目录下。
将locSDK3.3.jar文件拷贝到工程的libs目录下,并在工程属性->Java Build Path->Libraries中选择“Add JARs”,选定locSDK3.3.jar,确定后返回。
设置AndroidManifest.xml在application标签中声明service组件,为了避免各个app公用1个service出现的权限问题,新版本各个app单独拥有自己的定位service.<serviceandroid:name="com.baidu.location.f"android:enabled="true"android:process=":remote"></service>声明使用权限<uses-permission android:name="android.permission.ACCESS_COARSE_LOCATION"></uses-permission><uses-permissionandroid:name="android.permission.ACCESS_FINE_LOCATION"></uses-permission><uses-permissionandroid:name="android.permission.ACCESS_WIFI_STATE"></uses-permission><uses-permissionandroid:name="android.permission.ACCESS_NETWORK_STATE"></uses-permission><uses-permissionandroid:name="android.permission.CHANGE_WIFI_STATE"></uses-permission><uses-permissionandroid:name="android.permission.READ_PHONE_STATE"></uses-permission><uses-permissionandroid:name="android.permission.WRITE_EXTERNAL_STORAGE"></uses-permission> <uses-permission android:name="android.permission.INTERNET"/><uses-permissionandroid:name="android.permission.MOUNT_UNMOUNT_FILESYSTEMS"></uses-permission><uses-permissionandroid:name="android.permission.READ_LOGS"></uses-permission>具体操作1.初始化LocationClient类LocationClient类必须在主线程中声明。
百度地图开放平台,开发者专属位置智能服务平台

百度地图
百度地图开放平台,开发者专属位置智能服务平台
什么是百度地图开放平台?
以位置服务为核心,面向开发者提供LBS相关服务
百度地图开放平台,国内第一的LBS服务平台
覆盖23个行业,汇聚60万的开发者
每天响应150亿次定位服务请求
互联网+时代,开发者可以信赖的忠实伙伴
如何获得开发者的信赖?
LBS服务场景下的开发者需求
过去,通过全平台的API/SDK服务输出LBS服务能力
互联网+时代,开发者的LBS需求发生变迁
定位:离散位置到连续轨迹的需求延伸
定位:个体位置到共享位置的场景拓展
地图:通用的底图到个性化底图的升级
数据:千万级POI数据到亿万级交易数据的变迁
检索:位置检索需求更加的贴近业务场景
开发者面临的其他问题
开发者的最核心目标是更好的生存发展
收入流水品牌营销效率管理
如何满足开发者新的需求?
百度地图开放平台位置智能,全面解放开发者
•百度鹰眼,轨迹服务助力行业用户轻松连接线上线下;•百度慧眼,位置大数据助力开发者精细化用户运营;•交通云平台,位置智能服务助力传统行业快速信息化;
百度鹰眼——基于O2O的服务资源调度管理平台
百度鹰眼——基于可穿戴硬件的一体化解决方案
百度慧眼——基于位置大数据的用户常驻点分析
百度慧眼——基于位置大数据的区域用户画像分析
百度慧眼——基于位置大数据的POI综合评估
交通云——位置服务辅助交通规划决策
交通云——位置服务助力智慧城市信息化发展
谢谢!
欢迎关注百度地图开放平台:。
自主移动机器人的实现方法
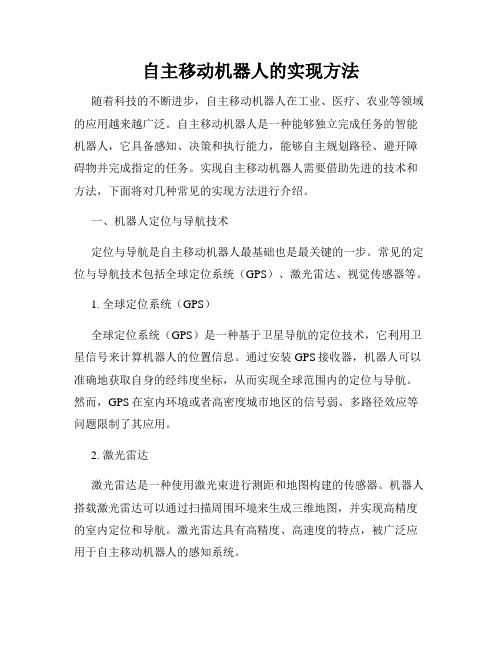
自主移动机器人的实现方法随着科技的不断进步,自主移动机器人在工业、医疗、农业等领域的应用越来越广泛。
自主移动机器人是一种能够独立完成任务的智能机器人,它具备感知、决策和执行能力,能够自主规划路径、避开障碍物并完成指定的任务。
实现自主移动机器人需要借助先进的技术和方法,下面将对几种常见的实现方法进行介绍。
一、机器人定位与导航技术定位与导航是自主移动机器人最基础也是最关键的一步。
常见的定位与导航技术包括全球定位系统(GPS)、激光雷达、视觉传感器等。
1. 全球定位系统(GPS)全球定位系统(GPS)是一种基于卫星导航的定位技术,它利用卫星信号来计算机器人的位置信息。
通过安装GPS接收器,机器人可以准确地获取自身的经纬度坐标,从而实现全球范围内的定位与导航。
然而,GPS在室内环境或者高密度城市地区的信号弱、多路径效应等问题限制了其应用。
2. 激光雷达激光雷达是一种使用激光束进行测距和地图构建的传感器。
机器人搭载激光雷达可以通过扫描周围环境来生成三维地图,并实现高精度的室内定位和导航。
激光雷达具有高精度、高速度的特点,被广泛应用于自主移动机器人的感知系统。
3. 视觉传感器视觉传感器可以通过获取环境中的图像信息来实现机器人的定位和导航。
一种常见的视觉传感器是摄像头,它可以捕捉实时图像并通过图像处理算法来提取特征点,进而实现机器人的定位和导航。
视觉传感器具有信息量大、感知能力强的特点,但对光线和环境条件的要求较高。
二、路径规划与避障算法路径规划与避障是机器人实现自主移动的核心任务。
根据机器人所处的环境和任务要求,选择合适的路径规划和避障算法十分关键。
1. A*算法A*算法是一种经典的图搜索算法,适用于离散的路径规划问题。
它通过估算每个节点到目标节点的代价函数,选择代价最小的路径来进行搜索。
A*算法简单高效,能够得到最优解,因此在自主移动机器人中得到了广泛应用。
2. 动态窗口法动态窗口法是一种常用的避障算法,它通过定义机器人的运动窗口和障碍物的情况,动态地调整机器人的速度和角度,使机器人能够自主避开障碍物,规划安全的路径。
一种基于AI的视频监控系统[发明专利]
![一种基于AI的视频监控系统[发明专利]](https://img.taocdn.com/s3/m/a8be591e7275a417866fb84ae45c3b3567ecdded.png)
(19)中华人民共和国国家知识产权局(12)发明专利申请(10)申请公布号 (43)申请公布日 (21)申请号 201911066825.2(22)申请日 2019.11.04(71)申请人 江苏安防科技有限公司地址 210000 江苏省南京市浦口区经济开发区万寿路15号(72)发明人 黄文杰 (74)专利代理机构 苏州中合知识产权代理事务所(普通合伙) 32266代理人 刘奇(51)Int.Cl.H04N 7/18(2006.01)G08B 13/196(2006.01)(54)发明名称一种基于AI的视频监控系统(57)摘要本发明属于视频监控技术领域,尤其为一种基于AI的视频监控系统,所述基于AI的视频监控系统包括数据采集模块、数据处理及通信单元、综合管理平台和移动终端,所述数据采集模块用于采集视频数据信号。
本发明与现有技术相比,能够实现对实时视频数据的监控和报警处理,以及区域范围内深度监控,当有警情发生时,能够实时显示报警信息和现场视频监控信息,并对发生警情的相应摄像头进行精准快速定位,系统及时处理分析警情危险系数并作出相应应急预案,辅助管理人员进行科学决策和指挥调度,对警情作出快速处置,同时向用户发送报警信息,及时提醒用户,真正意义上实现视频监控的信息化,使监控系统的安全性和可靠性得到显著提高。
权利要求书2页 说明书4页 附图2页CN 110769200 A 2020.02.07C N 110769200A1.一种基于AI的视频监控系统,其特征在于:所述基于AI的视频监控系统包括:数据采集模块(100),所述数据采集模块(100)用于采集视频数据信号;数据处理及通信单元(200),所述数据处理及通信单元(200)用于接收经数据采集模块(100)采集的视频数据信号并进行模拟数字信号处理、数据储存以及数据通信传输;综合管理平台(300),所述综合管理平台(300)用于接收经数据处理及通信单元(200)传输的数字模拟信号并进行实时数据监控以及处理分析,判断该数字模拟信号是否异常,当该数字模拟信号存在异常时进行报警处理;移动终端(400),所述移动终端(400)用于接收来自综合管理平台(300)发送的视频数据分析结果,当视频数据分析结果处于异常时产生报警信号。
中职《信息技术》教学设计-第8章-任务1--初识人工智能精选全文完整版
人工智能的发展让人类逐渐摆脱重复烦琐和低效的工作,人工智能的相关技术越来越多地应用在工业、农业、服务业等领域,正在改变甚至颠覆人们的日常生活。那么到底什么是人工智能?人工智能具体有哪些方面的应用?人工智能对人类社会未来的发展有哪些影响?下面将带着这些问题来了解人工智能。
任务分析
小华botaxi自动驾驶出租车,智能移动终端远程开空调等电气设备也早已运用,越来越多的人家里开始安装智能家居系统。人工智能在人们的生产生活中应用得越来越普遍,如智能移动终端里面的各种应用软件,包括同声传译、智能搜索、远程监控等。
通过学习和了解人工智能的起源和发展,了解人工智能的定义,进而了解人工智能的应用和发展趋势,为将来进一步学习和从事人工智能相关专业奠定基础。
知识讲授与操作演示(10min)
一、了解人工智能的定义
驾驶汽车,手机远程控制家电设备等场景,这些场景都是人工智能的应用场景。
了解人工智能工作原理
场景1的跳绳打卡的场景,采用阿里人工智能深度学习算法技术,通过手机摄像头来捕捉人体摆动幅度、识别动作要点,对跳绳完成数量、卡路里消耗量等数据进行自动统计。类似的应用场景还有作业自息,乘坐交通工具等条件,为用户推荐最适合的线路。任务情景里面的自动驾驶、人脸识别都具有人工智能的智能特点。
通过学习和了解人工智能的起源和发展,了解人工智能的定义,进而了解人工智能的应用和发展趋势,为将来进一步学习和从事人工智能相关专业奠定基础。
教学目标
知识目标
了解机器人的发展和应用
熟悉机器人基本技术
考
核
方
式
过程考核:学习知识掌握技能情况(20%);小组协作搜索信息、积极参与讨论与分享任务成果(50%)
终结考核:自我总结评价(30%)