基于图像处理的电梯导轨高精度测量的研究
基于视觉图像的铁轨平行性检测研究与仿真
i gs ma e .Ar o d d s rin r gsr t n e o l n t n mo e s b i o a c rtl it g ih f t rd s r o r r n l itt o e it i l rei ai d l o ao T mi o wa u h t c u a ey d s n u s l itt n er . i i e oi o
E p rme t h w h t h t o mp o e ed u l r c a all m ee t n a c r c ,a d p o i e ee e c xe i n ss o t a e me h d i r v st o b eta k p l ei d tc i c u a y n rv d sa r fr n e t h r s o
L n IYu -we i
( eat n f o m nct nE g erC og igEet n n ier gV ct nl o ee C ogig 0 3 1 hn ) D pr met m u iao ni e,hn qn l r i E g e n oao a C lg , h nqn 13 ,C ia oC i n co c n i i l 4
1 引言
随着国家经济的飞速发展 , 铁路运输成为 交通运输 的重 要组成部分 , 挥着不 可替代 的作用 。双轨轨道 的平 行性 , 发 与铁路运输的安全性关 系密切 … 。如 果双轨 轨道 的平行性 较差 , 则会导致列 车发生脱 轨或 者倾覆 , 成重大 的铁路 运 造 输安全事故 。国家投入 了大量 的资金 和人 力用于研 究双 轨 轨道平行性检测的方法 。双轨轨道平行性检 测 , 也成 为铁 路运输领域研究 的重点问题。当前 , 主流 的双轨轨道平 行性
电梯导轨直线度和扭曲度检验系统的研制
信息技术和应用
3 电梯导轨直线度、扭曲度检验系统电梯导轨直线度、扭曲度检验必须要有相关的规范标准,并且根据标准内容展开软硬件设计。
3.1 软件方面本系统主要是使用了激光源、计算机、移动光靶。
将十字线激光源设置在导轨一端,保证发射的激光束可以和导轨呈现为平行状态。
移动光靶可以在导轨上做出合理移动,并转移到指定位置上,转化成为激光束具体图像,进行摄取和干预,使用计算机展开后续处理,从而得到了十字线中心点坐标,也可以掌握横线偏角。
(1) 图像处理。
在直线度、扭曲度检测当中,
相关数据支持是必不可少的,避免数据过于单一。
由于单一数据检测缺乏可信度,可能会造成检测偏差问题。
所以在数据处理当中,需要采用图像处理方案。
① 必须要有效确定起始直线检测点,不得出现分毫的偏差。
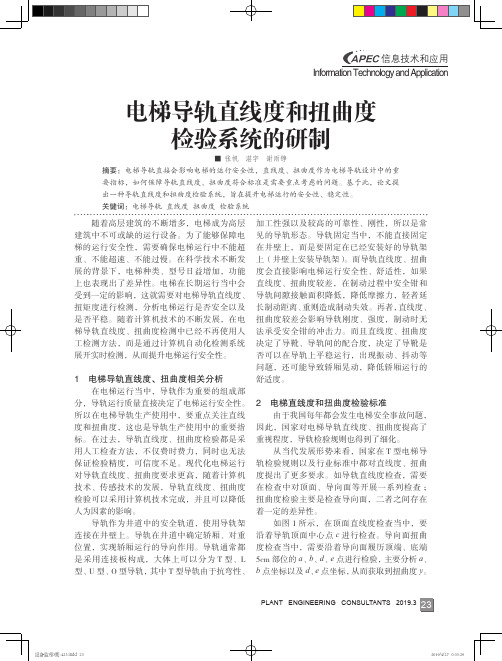
② 在图像处理当中,检测起顶面导向面导向面y x a d c e b 图1 导轨直线度和扭曲度检验点
实 务。
基于图像处理的轨道位移监测系统研究

全运行有着重要的影响,但是出于安全考虑高铁轨道 上是不允许安装任何监测设备的,而人工测量只能在 夜晚天窗点进行,不能实现一天 24小时连续测量。本 文研究了一种基于图像处理的轨道位移监测系统,运 用在郑州黄河公铁两用桥上,解决了非接触式的位移 监测的需求。
位移传感器种类非常多,根据安装方式可以分为 接触和非接触式,其中:接触式的有磁致伸缩式、电阻
TRACK DISPLACEMENTMONITORING SYSTEM BASEDONIMAGEPROCESSING
LiuYouqiao
(ChinaRailwayMajorBridgeReconnaissanceandDesignInstituteCo.,Ltd.,Wuhan430050,Hubei,China) (ChinaRailwayMajorBridge(Nanjing)BridgeandTunnelInspectandRetrofitCo.,Ltd.,Nanjing210061,Jiangsu,China)
摘 要 在高铁桥梁轨道伸缩调节器处的轨道位移是影响行车安全的关键薄弱点。对该处轨道的位移监测非 常必要,但是在高铁线路上是不允许安装任何设备的。为了解决实时监测的需求,研究基于图像处理的位移监 测系统。在轨道侧边安装固定摄像机,定时拍摄照片;使用数字图像处理算法计算出轨道的实际位移。为了达到 比较好的效果,使用相位相关法求相对位移,并且使用傅里叶梅林变换解决相机振动后偏移和更换后需要重新标 定变焦倍数的问题。该系统实现实时自动测量,并且取得较好的测量精度,解决非接触测量的需求。 关键词 图像处理 相位相关 梅林变换 位移监测 非接触测量 中图分类号 TP3 文献标识码 A DOI:10.3969/j.issn.1000386x.2019.01.044
电梯导轨直线度测量系统的研究与设计
仪 表 技 术 与 传 感 器
I sr m e t Te hn q a d S n o n tu n c i ue n esr
2 0 01
No 6 .
第 6期
电 梯 导 轨 直 线 度 测 量 系统 的 研 究 与 设 计
张铁壁 一孙 士尉 , . , 一李
(. 1 北京科技大学信 息学院 , 北京
光
0 10 ) 6 0 1
10 8 ;. 0 0 3 2 河北 工程技术高等专科学校 电气 系 , 河北沧州
摘 要 : 制 了一 种 基 于位 移 传 感 器 的 电梯 导 轨 直 线 度 测 量 系统 , 于 测 量 电梯 导轨 顶 面 直 线 度 , 电梯 导 轨 出 厂提 供 研 用 为 更为精确有 效的数据 。介 绍 了该 系统的组成 、 硬件原理 以及机械 装置 ; 系统 由电阻式位移传 感器对 导轨 的顶 面直线度 该 进 行 采 样 , 信 号 整 形 后 , 给 S C 系列 单 片机 1C 4 0 D 进 行 处 理 、 析 以及 显 示 ; 用 最 小二 乘 法 与 最 小 区域 法 时 实 经 送 T 2 5 1A 分 并
p id i a urn h o tag t e so lv trr i ,a d pr vde r c u ae daa f ree ao alfc oy. e pa rit e le n me s ig t e t p sr ih n s fee ao a l n o i s mo e a c r t t o lv trr i a tr Th pe n r — u du e he s se c mpo iin,hadwa e p i cpl a d is me h nia vie . S se d s a c d t y t m o sto r r rn i e, n t c a c lde c s y t m o e s mpln ftp tag t e s o lv ’ i g o o sr ih n s fee a trr i y rssie ds lc m e e s r,pa s sg ls a i g,t n be te td,a l z d,diply d by S o alb e itv ip a e nts n o s ina h p n he r ae nay e s a e TC e is sn l h p m i s re i ge c i c o r c so 2C541 rpo esr1 0AD. An ta s s e h ro so e s r m e td t e s q a e nd mi i u z eo ta g ne sme h d i s e s d t e er r fm a u e n a abyl a ts u r sa nm m on fsr iht s t — o s Ru i g r s t e tfe h ro so h e u e d. nn n e ulstsii d t e e r ft e m as r men y t m e o d t e uie e s o a t r i h s hihe p lc to ts se b y n he r q r m nt ffc oy, t a g r a p ia in a d p o to a u . n r mo in v l e Ke y wor : ee ao al sr i h n s ds lv trr i; tag t e s;e r ra s s me t ro s e s n
基于机器视觉和图像识别的铁路铁轨异常检测技术探讨

基于机器视觉和图像识别的铁路铁轨异常检测技术探讨近年来,随着科技的不断进步和发展,机器视觉和图像识别技术得到了广泛应用。
在铁路运输领域,铁轨的异常状况往往会导致安全问题和运营延误。
因此,基于机器视觉和图像识别的铁路铁轨异常检测技术备受关注。
本文将从原理、应用和挑战三个方面探讨这一技术的发展。
一、原理介绍基于机器视觉和图像识别的铁路铁轨异常检测技术,主要依靠计算机视觉和图像处理算法对铁轨图像进行分析和识别。
首先,通过传感器获取铁路铁轨的图像或视频数据,然后对数据进行预处理,包括去噪、增强等。
接下来,利用图像处理算法提取铁轨的特征和形状信息,如轨道几何、轨距、轨道平直度等。
最后,将提取的特征与正常轨道的标准进行比对,若存在异常情况,则及时进行报警或修复。
二、应用场景基于机器视觉和图像识别的铁路铁轨异常检测技术在现实应用中具有广泛的前景。
首先,它可以用于铁路运输安全监测。
通过对铁轨图像的实时分析,可以及时发现铁轨的裂纹、变形、断裂等异常情况,避免因异常状况导致的事故发生。
其次,它可以应用于铁路维护和保养。
通过自动化地检测和分析铁轨异常,可以减少人工巡检的工作量和成本,并且能够提供更准确的异常信息,有助于优化维护计划和资源分配。
三、技术挑战尽管基于机器视觉和图像识别的铁路铁轨异常检测技术具有广泛的应用前景,但在实际应用中还存在一些技术挑战和困难。
首先,如何有效地处理大量的铁轨图像和视频数据是一个难题。
铁路系统运行着大量的列车,每个列车都会产生大量的图像和视频数据,如何高效地存储和处理这些数据是一个挑战。
其次,图像质量的问题也是一个需要解决的难题。
铁轨的环境复杂多变,如天气、光照等因素都会对图像质量产生影响,如何在复杂环境中获取清晰可靠的铁轨图像是一个难题。
此外,对于轨道异常的准确识别也是一个挑战。
铁轨上可能存在各种各样的异常情况,如轨道扭转、骨节脱落等,如何准确地识别和区分这些异常情况需要进一步的研究和探索。
一种基于图像处理的铁轨自动检测方法
[ sr c]T i pp r rp ss e fo a l ep t r eetrL P fr uo t idtcini fe h a w ys t n.t ss L D t Ab tat hs ae o oe st c li at nd t o( L D) o tma cr l e t ri t i a t i sIu e P p a o l n e c a i a e o n g rl ao L o
一
文章编号:lo_ 48o79- o—0 oo 32( o l-27_ 文献标识码: 2 ) -0 3 A
If - P9 Jr , 31  ̄ T
种 基 于 图像 处理 的铁 轨 自动 检 测 方 法
关 鹏 ,顾 晓东 ,张立明
( 复旦大学 电子工程系智能与 图像实验室 ,上海 2 0 3 ) 0 4 3
摘
要 :提 出了一套 局部线 型检测算子 ( L D)用于 货运编组站铁轨 的自动检 测。利用该算子提取铁 轨边缘 ,去除检测结果 中的干扰信 LP
息, 结合 H u h o g 变换 的思想 ,实现 了断线相连。该检测 结果与 其他边 缘提取 方法相比较 , 复杂 背景上铁轨的检测更有效 , 方法 能定位 对 该
GUAN e g GU a - o g ZHANG - n P n, Xi o d n , Limi g
( tlg n e n g a , e to lc o i n n ie r g F d n U iest, h n h i 0 4 3 I el e c dI n i a ma e b D p . f e t n c dE gn ei , u a n v ri S a g a 0 3 ) L E r a n y 2
从而造成大量虚警 。
浅析电梯导轨直线度及扭曲度的检验系统的设计
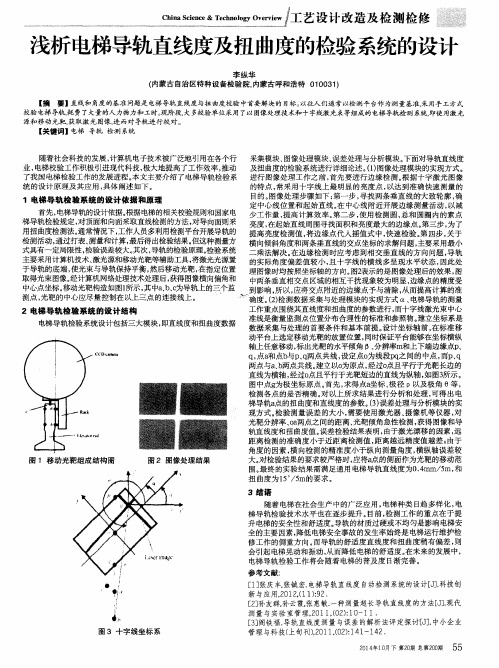
测点, 光靶的中心应尽量控制在以上三点的连接线上。
2电梯导轨检验系统 的设计结构
移动光靶构造如图1 所示 , 其中a 、 b 、 c 为导轨上的三 监 到影响 所 以, 应将交点附近的边缘点予与清除 , 从而提高计算的准
,
确度。 ( 2 ) 检测数据采集与处理模块的实现方式 、 电 梯导轨的测量
, ,
。
电 芦 梯 导 轨 检 验 系 统 的 设 计 依 据 和 原 理
一
星 挈
鬈 繁 委 嚣 薷 要 纛 裹 豢
,
鬈
通常 隋 况下 , 工作人员多利用检测平台开展导轨的 提高亮度检 测值 将边缘 点代入插值 式中, 快速 检验 。 第 四步 , 关于
。
定局限 , 检验误差 较大 。 其次 , 导轨的检验原 。 检验 系统 二乘法解决 在边缘 检测时应 考虑 到相 交垂直线的方 向问题 , 导轨 主要采用计算机技术 、 激光源和移动光靶等辅助工具 , 将激光光源置 的实 际角度偏差值较小 , 且 十字线 的横 线多呈现水 平状态 , 因此处
。
式 测 具 动, 有 通 过 来自 妻 、 萼 和 笋, 最 得 出
。 但 这 种 测 量 方 横 向 倾 斜角 度 和 两 条 垂 直 线 的 交 点 坐 标 的 求 解问 题, 主 要 采 用 最 小
取 于 导 得 枣 轨 底 图 像 端, 使 光束 与 导 塾 保 持 平 , 然 后 移 光 靶, 套 指 定 位 置 理 图 像 时 均 按 照 坐 标 轴的 方向 。 图 2 表 示 的 是 图 像 处 理 后 的 效 果, 图 中 心 点 坐 标 耸 计 算 网 处 理 技 术 处 理 后, 获 得 图 向 偏 角 和 中 两 条 垂 直 相 交 点 区 域 的 相 互 干 扰 现 象 较 为明 显, 边 缘 点 的 精 度 受
电梯导轨高精度自动巡检机器人测控系统设计
电梯导轨高精度自动巡检机器人测控系统设计梁敏健;李大琳;黄永坚【摘要】电梯导轨在制造、安装和使用过程中会带来变形和位移,形成导轨垂直度误差和导轨顶面间距偏差,对电梯安全使用造成危害,影响电梯使用寿命.因此导轨安装质量测量对电梯运行安全尤为重要.现有电梯导轨测量方法存在精度不足、操作者劳动强度大、所需参数不能一次性测量等问题.文中遵照有关国家标准,并对比同类系统的测量原理和实现方案,提出了一种具有电梯导轨垂直度偏差检测、轨距偏差检测、导轨接头和支架位置检测功能,不依赖于脚手架或轿厢,且弥补了一些现有同类系统不足的自动巡检机器人的测控系统设计方案.试验结果表明,所设计测控系统完全满足机器人的测量和控制需求,测量精度达到相关国家标准规定.【期刊名称】《起重运输机械》【年(卷),期】2018(000)012【总页数】5页(P124-128)【关键词】电梯;导轨;多参数检测;测控系统【作者】梁敏健;李大琳;黄永坚【作者单位】广东省特种设备检测研究院珠海检测院珠海 519002;吉林大学珠海学院珠海 519002;广东省特种设备检测研究院珠海检测院珠海 519002【正文语种】中文【中图分类】TU8570 概述电梯设备检测属于国家特种设备检验范畴,GB J310—1988《电梯安装工程质量检验评定标准》中对电梯系统的各项参数要求有明确的规定。
电梯导轨垂直度是保证电梯正常运行的一项重要性能指标。
电梯导轨在制造和安装过程中会带来偏差,而且在电梯的使用过程中,由于电梯井混凝结构的收缩变形,地基沉降,轿厢振动摩擦等因素的影响,导轨可能发生位移变形,形成新的导轨垂直度误差和导轨顶面间距偏差。
导轨垂直度偏差过大会造成电梯运行摆动颠簸,导轨顶面间距偏差过大会引起轿厢水平晃动,过小会使轿厢垂直振动,最终影响电梯的安全运行和使用寿命。
因此,每隔一定时间也需要对使用中的导轨进行测量,对有问题的导轨及时调整以保证电梯安全运行。
TSG7001—2009《电梯监督检验和定期检验规则——曳引与强制驱动电梯》要求每列导轨工作面每5m铅垂线测量值间最大偏差:轿厢导轨和设安全钳的T型对重导轨不大于1.2 mm,不设安全钳的T型对重导轨不大于2 mm;两列导轨顶面距离(轨距)偏差:轿厢导轨为0~2 mm,对重导轨为0~3 mm;每根导轨至少有2个导轨支架,两个支架之间距离一般不超过2.5 m(超过2.5 m,要有计算依据)。
基于机器视觉的电梯导轨垂直度检测
基于机器视觉的电梯导轨垂直度检测唐品;赵曦;赵群飞【摘要】An automatic detection system based on machine vision is designed to measure the verticality of elevator guide rail more effectively.A verticality measuring robot for elevator guide rail moves along the rail with a vertically fixed lighten ring. Canny transform is used to extract the elliptical edge poults acquired by a video camera. Then ellipse parameters are fitted. The relationships between lighten ring geometrical parameters and ellipse parameters are derived. So its geometric center and the normal vector are determined. The changes in the center of the lighten ring reflect those in the verticality of elevator guide rail, and the changes of the angle between normal vector and the vertical reflect the distortion direction of the guide rail. Experimental results show that the proposed system can measure the deformation of the guide rail easily and accurately.%为更有效地测量电梯导轨的垂直度,设计一种基于机器视觉的自动检测系统.利用电梯导轨垂直度检测机器人携带垂直安装在导轨上的发光圆环,使其在导轨上自主运行.通过Canny变换提取摄像机采集的成像椭圆图像边缘,拟合椭圆参数,推导发光圆环几何参数与椭圆参数的关系式,确定其圆心和法向向量.发光圆环圆心的变化反映导轨垂直度的变化,法向向量与竖直方向夹角反映导轨的扭曲方向.实验结果表明,该系统能方便准确地测量出导轨形变.【期刊名称】《计算机工程》【年(卷),期】2012(038)014【总页数】4页(P161-164)【关键词】发光圆环;电梯导轨;垂直度;机器视觉;椭圆拟合;图像处理【作者】唐品;赵曦;赵群飞【作者单位】上海交通大学自动化系系统控制与信息处理教育部重点实验室,上海200240;上海金融学院信息管理系,上海201209;上海交通大学自动化系系统控制与信息处理教育部重点实验室,上海200240【正文语种】中文【中图分类】TP391.411 概述随着经济的飞速发展,电梯的使用越来越广泛,电梯的安装与维护也越来越受到人们的关注。
图像处理在轨道检测中的应用研究的开题报告
图像处理在轨道检测中的应用研究的开题报告
一、选题背景
随着卫星技术的不断发展,卫星轨道检测已经成为一项重要的任务。
卫星轨道检测主要是利用多种观测手段对卫星的状态进行监测和分析,以保证卫星的运行轨道符合设计要求。
其中,图像处理技术因其广泛的应用面和高效的特点,在卫星轨道检测中的应用备受关注。
二、选题意义
卫星轨道检测对于保障卫星的运行安全具有重要意义。
图像处理技术的应用可以帮助实现自动化轨道检测,并且可以提高轨道检测的精度、效率和准确性,从而有效地提高卫星的运行安全性。
三、研究内容
1. 轨道检测的基本原理及方法
2. 图像处理技术在轨道检测中的应用
3. 基于图像处理技术的自动化轨道检测系统的设计与实现
四、研究方法
本研究将采用文献研究法和实验研究法相结合的方式进行。
通过对卫星轨道检测相关的文献资料的阅读与分析,掌握轨道检测的基本原理和方法,并了解图像处理技术在轨道检测中的应用。
同时,采用实验研究法,设计并实现一个基于图像处理技术的自动化轨道检测系统,并通过实验验证该系统的可行性和有效性。
五、预期成果
1. 揭示卫星轨道检测的基本原理和方法
2. 探讨图像处理技术在轨道检测中的应用
3. 设计实现一个基于图像处理技术的自动化轨道检测系统
4. 验证该系统的可行性和有效性。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
1引言电梯导轨的安装质量特别是导轨的垂直度误差是影响电梯运行质量的重要因素,是保证电梯安全、可靠、稳定运行的一项重要性能指标。
GBJ310—88《电梯安装工程质量检验评定标准》中对电梯导轨垂直度的要求为每5m允许偏差0.7mm,检验方法为“吊线,尺量检查”。
这种“吊线,尺量检查”导轨垂直度的方法在电梯行业沿用了数十年,其优点是测量工具、量具简单,测量数据直观;缺点是测量精度因人而异,不易实现测量数据自动采集,工作效率低,特别是在电梯维护阶段,由于没有了脚手架,无法使用吊垂线,更难以检测导轨垂直度。
近年来,电梯行业中出现了用于导轨检测的激光铅直仪,使用高精度的铅垂激光束代替吊垂线,使检测精度有所提高,测量原理和工艺与“吊线法”基本相同,但是这种方法需要在每个检测位置上由人工逐一测量,测量精度不高,而且测量数据由人工读取,缺少与现在具有强大处理能力计算机的良好接口能力。
为提高电梯导轨的测量精度和提高测量效率,实现电梯导轨垂直度的自动精确测量,本文利用激光技术和图像处理技术设计了一套电梯垂直度自动检测系统。
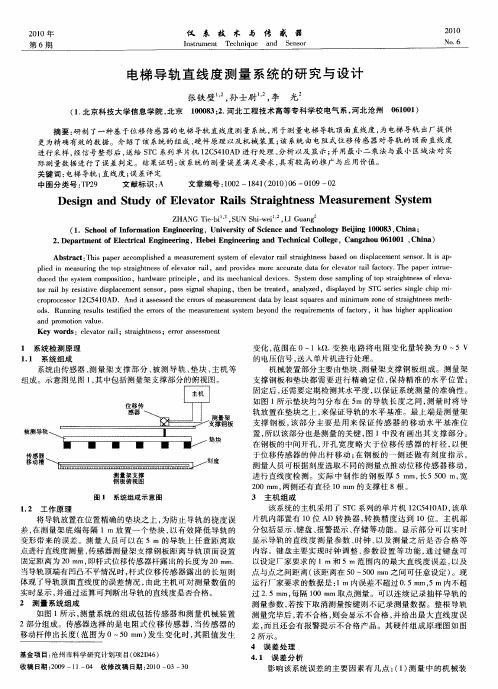
2系统构成该系统的组成如图1所示:CCD相机固定与接收装置1、激光发射系统、视频采集处理系统。
激光发射系统包括:自动调垂直功能的激光发射器3和三脚架2,视频采集处理系统包括CCD摄像机4、视频采集卡5、软件系统、成像玻璃片6和成像薄板7。
系统的优点:(1)把发射器放在地面上,并通过三脚架和自动调垂直装置使其自动调垂直,从而消除了安装误差的影响;(2)通过CCD采集激光斑图像,然后放大图像,通过计算机进行实时的图像分析处理模块,找到激光光斑中心位置坐标,并且把坐标值存入数据库,从而实现数据的实时采集处理;(3)由于测量过程中CCD放大了图像,再求光斑中心点坐标,所以可以有效提高了测量精度。
我们设置的是56cm:560pixels(也就是说接受图像的实际面积是56cm×56cm,而在计算机中显示的确是560pixels×560pixels),这样1pixel对应实际是0.1mm,由此测量精度可达到0.1mm。
最终目标是:CCD取得激光光斑的图像,通过图像处理模块找到激光光斑的中心,然后根据中心点的坐标值,就可以对电梯导轨的基于图像处理的电梯导轨高精度测量的研究季海忠金惠良刘成良(上海交通大学机械与动力学院,上海200030)E-mail:jihaizhong@sjtu.edu.cn摘要结合激光测量技术和图像处理技术,文章提出了一种基于图像处理的高速电梯导轨横向变形的检测方法。
通过最大值滤波、图像腐蚀、图像膨胀、OTSU二值化、Canny变换寻找轮廓、最小二乘法椭圆最小二乘拟合与优选等方法,完全可以确定激光光斑的中心位置,然后就可以对导轨的垂直度进行调整,从而大大提高了电梯导轨检测的范围和精度。
实验结果表明:该方法具有较高的精度和效率。
关键词电梯导轨横向变形OTSU二值化Canny变换最小二乘椭圆拟合文章编号1002-8331-(2006)21-0229-04文献标识码A中图分类号TP391StudyofHigh-PrecisionMensurementofElevatorGuideBasedonImageProcessingJiHaizhongJinHuiliangLiuChengliang(SchoolofMechanicalEngineering,ShanghaiJiaotongUniversity,Shanghai200030)Abstract:Anewschemeispresentedthattheverticalityofelevator’sguidewayismeasuredbycombininglasertechnologywithimageprocessingtechnology.Severalimagesprocessingtechnologyisusedtopositionthecenteroflaserimage,suchasmaximumfilter,OTSUbinarization,Cannytransform,etc.theadjustmentismadebythemeasurement.Theverticalityofelevator’sguidewaycanbemeasuredandadjustedquicklyandaccurately.Keywords:elevator’sguideway,OTSUbinarization,Cannytransform,ellipsefitting,least-square垂直度进行校正。
3关键问题要实现精确快速的测量,需要解决以下几个关键技术问题:(1)当CCD接收到图像不是一个完整图像如图3,即只接受到图像一部分时,为找到其中心增加了难度。
通常找圆心的方法Hough变换,然而由于激光斑不可能是纯圆,而是一些亮度不均匀的椭圆光环如图3,并且当接受图像不完整的时候,Hough变换对寻找椭圆的一部分时显得无能为力,并且Hough变换找椭圆有5个参数,寻找效率显著下降,由于它有很高的计算复杂度,所以很难满足实时处理的要求[1]。
(2)图像处理一个非常关键的部分是阈值的选择,当距离在不断变化,光线强度也不均匀变化时,如何让算法一直有效,不需要人工调节,这也是一个需要解决的问题。
(3)要实现等时间间距的测量。
但是由于Windows不是一个实时的操作系统,要实现等时间间隔所以难度会有所增加。
(4)因为要测量的是高速电梯,所以要使图像实处理的时间尽量少,即处理一幅图像的时间要少于100ms。
其中本系统所遇到的核心的问题是问题(1)和(2)。
4数学原理灰度图像的二值化,其中阈值的选择有着举足轻重的作用,也是本次图像处理的关键之一,它处理结果的好坏对下面的算法有着决定性的影响。
由于测量过程中,距离在不断变换并且光线强度也不段变化,不可能用单一阈值,而且需要一种不依赖物体和背景像素的概率密度分布模型,这样就选择了OTSU算法,这种算法是自适应计算单阈值(转换灰度图像为二值图像)的简单高效方法。
然而在实际处理中,当距离增加或光线变化比较显著时,实践表明,OTSU算法,并不能更好地工作。
这是为什么呢?下面分析一下究竟是什么原因造成的。
一副图像从本质上说就是入射到场景中的光源总量和也称入射函数l(x,y)和场景中物体反射光的总量也称反射函数g(x,y)乘积:f(x,y)=g(x,y)l(x,y)0<l(x,y)<∞,0<g(x,y)<1其中反射函数g(x,y)取决于成像物体的特性。
这样人和光照的空间变换都会引起成像时所记录下的反射函数乘性的干扰,可以将乘性干扰转变为加性干扰,对上式取对数:lnf(x,y)=lng(x,y)+lnl(x,y)于是可以用lnf(x,y)的直方图代替f(x,y)的直方图有如下定义:z(x,y)≡lnf(x,y)g"(x,y)=lng(x,y)l"(x,y)=lnl(x,y)所以可得:z(x,y)=g"(x,y)+l"(x,y)由于直方图可以看成概率密度函数,而一个随机变量的微分就是其概率密度函数。
我们的问题可以转化为两个分部函数和的分布函数是什么。
由定义知:z的分布函数:Pz(u)=P(z≤u)直线g"+l"=u将平面(g",l")分为两个平面。
一半z>u,另一半z<u。
其中z<u概率等于(g",l")的概率密度函数在整个z<u半平面的积分:Pz(u)=+∞l"=-∞$u-l"r"=-∞$pg"l"(g",l")dg"dl"其中pg"l"(g",l")表示随机变量g"和l"联合概率密度函数。
为求z的概率密度,对Pz(u)关于u求偏微分,一次应用莱布尼兹法则:f(x;!)->u-l"g"=-∞$pg"l"(g",l")dg"b(!)->+∞a(!)->-∞当需要对f(x;!)关于u求微分时,再次应用莱布尼兹法则,其实f(x;!)本身是依赖于所要微分的参数u的积分:Pz(u)=dPzudu=∞l"=-∞$dduu-l"g"=-∞$pg"l"(g",l")dg"%&dl"这两个随机变量g"和l"是相互独立的,其中g"与图像表面有关,而l"与光源有关,因此他们的联合概率密度函数可以表示为:pg"l"=pg"(g")pl"(l")代入上式:pz(u)=∞-∞$pg"(u-l")pl"(l")dl"这表明z的直方图也就是概率密度函数,它与两个随机变量g"和l"直方图的卷积相等。
假如光照时均匀的,于是:l(x,y)常数=>l"=lnl(x,y)=l"0=常数于是,pl"(l")="(l"-l"0),于是,pz(u)=pg"(u)结论:均衡光照下,反射函数的直方图基本上不受影响,但是,如果光照不均匀,直方图就会严重变形,导致了OTSU的失效,从上面公式可以看出其实不只OTSU,所有图像处理都会遇到类似的问题。
为避免上述情况的产生有两种方案:(1)将图像分割成一些小块,使每一小块的光照大致均衡,将每一小块单独处理。
(2)利用具有均衡表面反射的图像,并且用r(x,y)除这幅图像f(x,y),构造一副只与光照场相关的图像。
(3)使用适当硬件,尽量消除不均衡光照影响。
由于处理工程中,不可能取得具有均衡表面反射的图像,(2)是我们无法做到的,因此采用的方法是(1)和(3)结合,即把图像分块,而且为避免不均衡光照影响,把CCD放在图1CCD固定接受装置1中,并且前端接受的玻璃片也是对激光透过性较好,但是对其余光线透过性较差的,提倡在使用这套系统时,最好是在光线比较暗的条件下。
其目的还是为了消除不均衡光线的影响。
这样问题(2)已经得到初步解决。
要实现等时间间隔,必须提高图像处理线程的优先级,使其处于实时处理状态,Windows9x/NT操作系统中,按照不同的优先级调度进程的运行。
优先级共有32级,从0~31,其中0~15时普通优先级,16~30为实时优先级。