A framework for a multi-robot assistance system
AICE人工智能等级考试 三级考前冲刺
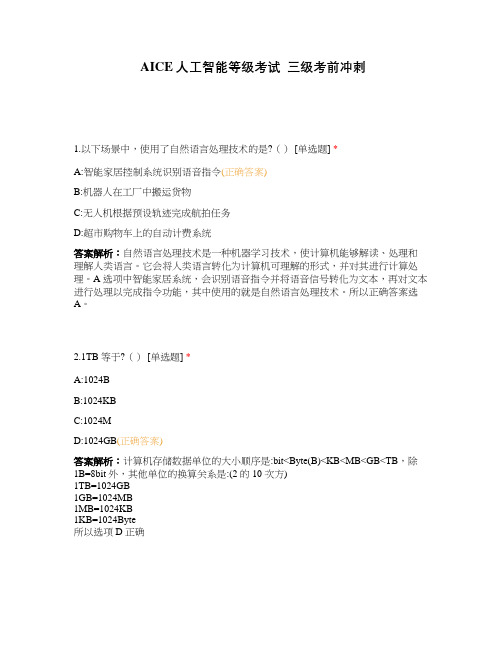
AICE人工智能等级考试三级考前冲刺1.以下场景中,使用了自然语言处理技术的是?() [单选题] *A:智能家居控制系统识别语音指令(正确答案)B:机器人在工厂中搬运货物C:无人机根据预设轨迹完成航拍任务D:超市购物车上的自动计费系统答案解析:自然语言处理技术是一种机器学习技术,使计算机能够解读、处理和理解人类语言。
它会将人类语言转化为计算机可理解的形式,并对其进行计算处理。
A 选项中智能家居系统,会识别语音指令并将语音信号转化为文本,再对文本进行处理以完成指令功能,其中使用的就是自然语言处理技术。
所以正确答案选A。
2.1TB 等于?() [单选题] *A:1024BB:1024KBC:1024MD:1024GB(正确答案)答案解析:计算机存储数据单位的大小顺序是:bit<Byte(B)<KB<MB<GB<TB,除1B=8bit 外,其他单位的换算关系是:(2 的 10 次方)1TB=1024GB1GB=1024MB1MB=1024KB1KB=1024Byte所以选项 D 正确3.运行下方程序打印的结果是?()animal='8l8phant'foriinanimal:ifi=='8':animal=animal.replace(i,'e')breakprint(animal) [单选题] *A:8l8phantB:iliphantC:elephant(正确答案)D:Elephant答案解析:这段程序的功能是将字符串中的某个字符替换为另一个字符,最终输出替换后的字符串。
程序使用 for 循环遍历字符串'8l8phant'中的每个字符,当遍历到字符'8'时,使用replace()方法将该字符串中所有字符'8'替换为字符'e',并结束程序。
最后,输出替换后的字符串为"elephant"。
诺瓦科技无线LED控制卡LED多媒体播放器TB6详细参数说明书
Taurus SeriesMultimedia PlayersTB6Specifications Doc u ment V ersion:V1.3.2Doc u ment Number:NS120100361Copyright © 2018 Xi'an NovaStar Tech Co., Ltd. All Rights Reserved.No part of this document may be copied, reproduced, extracted or transmitted in any form or by any means without the prior written consent of Xi’an NovaStar Tech Co., Ltd.Trademarkis a trademark of Xi’an NovaStar Tech Co., Ltd.Statementwww.novastar.techi Table of ContentsTable of ContentsYou are welcome to use the product of Xi’an NovaStar Tech Co., Ltd. (hereinafter referred to asNovaStar). This document is intended to help you understand and use the product. For accuracy and reliability, NovaStar may make improvements and/or changes to this document at any time and without notice. If you experience any problems in use or have any suggestions, please contact us via contact info given in document. We will do our best to solve any issues, as well as evaluate and implement any suggestions.Table of Contents (ii)1 Overview (1)1.1 Introduction (1)1.2 Application (1)2 Features (3)2.1 Synchronization mechanism for multi-screen playing (3)2.2 Powerful Processing Capability (3)2.3 Omnidirectional Control Plan (3)2.4 Synchronous and Asynchronous Dual-Mode (4)2.5 Dual-Wi-Fi Mode .......................................................................................................................................... 42.5.1 Wi-Fi AP Mode (5)2.5.2 Wi-Fi Sta Mode (5)2.5.3 Wi-Fi AP+Sta Mode (5)2.6 Redundant Backup (6)3 Hardware Structure (7)3.1 Appearance (7)3.1.1 Front Panel (7)3.1.2 Rear Panel (8)3.2 Dimensions (9)4 Software Structure (10)4.1 System Software ........................................................................................................................................104.2 Related Configuration Software .................................................................................................................105 Product Specifications ................................................................................................................ 116 Audio and Video Decoder Specifications (13)6.1 Image .........................................................................................................................................................136.1.1 Decoder (13)6.1.2 Encoder (13)6.2 Audio ..........................................................................................................................................................146.2.1 Decoder (14)6.2.2 Encoder (14)www.novastar.tech ii Table of Contents6.3 Video ..........................................................................................................................................................156.3.1 Decoder (15)6.3.2 Encoder ..................................................................................................................................................16iii1 Overview1 Overview 1.1 IntroductionTaurus series products are NovaStar's second generation of multimedia playersdedicated to small and medium-sized full-color LED displays.TB6 of the Taurus series products (hereinafter referred to as “TB6”) feature followingadvantages, better satisfying users’ requirements:●Loading capacity up to 1,300,000 pixels●Synchronization mechanism for multi-screen playing●Powerful processing capability●Omnidirectional control plan●Synchronous and asynchronous dual-mode●Dual-Wi-Fi mode ●Redundant backup Note:If the user has a high demand on synchronization, the time synchronization module isrecommended. For details, please consult our technical staff.In addition to solution publishing and screen control via PC, mobile phones and LAN,the omnidirectional control plan also supports remote centralized publishing andmonitoring.1.2 ApplicationTaurus series products can be widely used in LED commercial display field, such asbar screen, chain store screen, advertising machine, mirror screen, retail store screen,door head screen, on board screen and the screen requiring no PC.Classification of Taurus’ application cases is shown in Table 1-1. Table1 Overview2 Features 2.1 Synchronization mechanism for multi-screen playingThe TB6 support switching on/off function of synchronous display.When synchronous display is enabled, the same content can be played on differentdisplays synchronously if the time of different TB6 units are synchronous with oneanother and the same solution is being played.2.2 Powerful Processing CapabilityThe TB6 features powerful hardware processing capability:● 1.5 GHz eight-core processor●Support for H.265 4K high-definition video hardware decoding playback●Support for 1080P video hardware decoding● 2 GB operating memory●8 GB on-board internal storage space with 4 GB available for users2.3 Omnidirectional Control PlanCO.,LTD.●More efficient: Use the cloud service mode to process services through a uniform platform. For example, VNNOX is used to edit and publish solutions, and NovaiCare is used to centrally monitor display status.● More reliable: Ensure the reliability based on active and standby disaster recovery mechanism and data backup mechanism of the server.● More safe: Ensure the system safety through channel encryption, data fingerprint and permission management.● Easier to use: VNNOX and NovaiCare can be accessed through Web. As long as there is internet, operation can be performed anytime and anywhere. ●More effective: This mode is more suitable for the commercial mode of advertising industry and digital signage industry, and makes information spreading more effective.2.4 Synchronous and Asynchronous Dual-ModeThe TB6 supports synchronous and asynchronous dual-mode, allowing more application cases and being user-friendly.When internal video source is applied, the TB6 is in asynchronous mode; when HDMI-input video source is used, the TB6 is in synchronous mode. Content can be scaled and displayed to fit the screen size automatically in synchronous mode. Users can manually and timely switch between synchronous and asynchronous modes, as well as set HDMI priority.2.5 Dual-Wi-Fi ModeThe TB6 have permanent Wi-Fi AP and support the Wi-Fi Sta mode, carrying advantages as shown below:●Completely cover Wi-Fi connection scene. The TB6 can be connected to throughself-carried Wi-Fi AP or the external router.●Completely cover client terminals. Mobile phone, Pad and PC can be used to login TB6 through wireless network.●Require no wiring. Display management can be managed at any time, havingimprovements in efficiency.TB6’s Wi-Fi AP signal strength is related to the transmit distance and environment.Users can change the Wi-Fi antenna as required.2.5.1 Wi-Fi AP ModeUsers connect the Wi-Fi AP of a TB6 to directly access the TB6. The SSID is “AP +the last 8 digits of the SN”, for example, “AP10000033”, and the default password “12345678”.Configure an external router for a TB6 and users can access the TB6 by connectingthe external router. If an external router is configured for multiple TB6 units, a LAN canbe created. Users can access any of the TB6 via the LAN.is2.5.2 Wi-Fi Sta Mode2.5.3 Wi-Fi AP+Sta ModeIn Wi-Fi AP+ Sta connection mode, users can either directly access the TB6 oraccess internet through bridging connection. Upon the cluster solution, VNNOX andNovaiCare can realize remote solution publishing and remote monitoring respectivelythrough the Internet.TB6 Specifications 2 Features2.6Redundant BackupTB6 support network redundant backup and Ethernet port redundant backup.●Network redundant backup: The TB6 automatically selects internet connectionmode among wired network or Wi-Fi Sta network according to the priority.●Ethernet port redundant backup: The TB6 enhances connection reliabilitythrough active and standby redundant mechanism for the Ethernet port used toconnect with the receiving card.Hardware Structure3 Hardware Structure 3.1 AppearancePanelHardware StructureNote: All product pictures shown in this document are for illustration purpose only. Actual product may vary.Table 3-1 Description of TB6 front panelFigure 3-2 Rear panel of the TB6Note: All product pictures shown in this document are for illustration purpose only. Actual product may vary.Table 3-2 Description of TB6 rear panelHardware StructureUnit: mm4 Software Structure4 Software Structure4.1 System Software●Android operating system software●Android terminal application software●FPGA programNote: The third-party applications are not supported.4.2 Related Configuration SoftwareT5 Product Specifications 5 Product Specifications5 Product SpecificationsAntennaTECH NOVASTARXI'ANTaurus Series Multimedia Players TB6 Specifications6 Audio and Video Decoder Specifications6Specifications6.1 Image6.1.1 DecoderCO.,LTD.6.2 AudioH.264.。
四年级下册,我的机器人英语作文
四年级下册,我的机器人英语作文全文共3篇示例,供读者参考篇1My RobotI've always dreamed of having my very own robot! Robots are just so cool with their fancy technology and ability to do all sorts of amazing things. Well, dreams really do come true because last month for my 10th birthday, my parents surprised me with an incredible gift - a state-of-the-art robot helper!His name is Andy and he's one of the most advanced household robot assistants on the market. Andy stands about four feet tall and has a sleek white body with blue trim. Instead of legs, he has a single roller ball to glide around on. His head is rounded with a digital face that can display any expression. He has two long flexible arms to grab and manipulate objects.When I first saw Andy, I was speechless. I just stood there with my jaw dropped, staring at him in awe. After snapping out of my robotic trance, I ran over and gave my parents a huge hug to thank them. They helped me get Andy set up and activated. The first thing he did was greet me with a friendly wave of hisarm and said "Hello Maxwell! I'm Andy, your new robotic assistant. I'm excited to help out in any way I can."Andy has quickly become like another member of the family. My little sister Lily absolutely adores him and is always following him around asking a million questions about how he works. Andy patiently answers every one with a big smile on his digital face. Sometimes Lily gets a bit too rough, poking and prodding at Andy's mechanics. But he never complains and just politely asks her to be a little more gentle.In the mornings, Andy comes into my room right when my alarm goes off to wake me up. His cheery robot voice says "Good morning Maxwell! Time to start another exciting day." As much as I'd sometimes like to pull the covers back over my head, having Andy there gets me motivated to hop out of bed. He helps me get dressed, make my bed, and pack my backpack for school. If I'm running late, Andy will prepare me a quick breakfast like a protein shake or granola bar to eat on the way.After school, Andy is waiting patiently at home to greet me. The first thing he does is offer a healthy snack and drink tore-energize me after a long day at school. He's great at keeping me on a good routine and making sure I get my homework done before having free time. If I get stuck on a tough homeworkassignment, Andy is there to tutor me through explanations and examples until I understand. His database has information on pretty much every subject, making him an amazing personal teacher.Once my work is finished, Andy lets me relax with fun activities. If I want to play sports, he'll join me outside and we'll toss a baseball, kick a soccer ball, or shoot some hoops. Andy tracks the scores and stats with his precise robot calculations. For indoor fun, Andy will play games like video games, board games, you name it. He's so smart that he's a tough opponent to beat! But he makes the games exciting and is extremely good at providing hints if I get stuck without giving too much away.Some of my favorite times are when I work on my own inventions and robot designs. Andy is programmed with tons of knowledge about engineering and technology. He lets me borrow tools from his toolkit to build prototypes and offers guidance when I get stuck. My dream is to one day become a brilliant inventor or robot engineer, so having a real live robot assistant is an incredibly valuable resource.Around dinner time, Andy starts helping my mom out in the kitchen. He's an amazing chef with crazy robot cooking skills. His arms can chop vegetables at lightning speed into perfect sizesand shapes. Andy follows recipes to a tee for great tasting meals. But he also gets creative putting together his own robot recipes that are actually quite delicious! Once the food is ready, he'll set the table and make sure we're eating a nutritious, balanced meal as a family.After dinner, Andy sticks around to help with cleaning up. He'll clear the table, load the dishwasher, wipe down the counters, sweep, and mop. Anything involving cleaning or chores, Andy is a huge help to my parents. No more arguing with me and Lily about whose turn it is to do dishes or take out the trash. Andy takes care of it all without complaining in the slightest!At bedtime, Andy does one final check to make sure Lily and I have brushed our teeth, flossed, and gotten ready for bed properly. He tucks us in and wishes us goodnight with a script my parents set for him - "Sleep well Maxwell and Lily! Have sweet robot dreams and I'll see you again in the morning. Goodnight!" Then his blue lights dim as he goes into power-saving sleep mode until sunrise.There are so many other incredible things Andy can do that I haven't even covered! He's a multi-talented robot who does everything from helping me learn to code, to setting appointments for my parents, keeping our home security systemrunning smoothly, and even telling funny jokes and stories. I feel so fortunate to have Andy as my very own robot buddy.Having a real robot like Andy has been an unbelievably awesome experience. He makes my life so much easier and fun in countless ways. Andy is a true personal assistant looking out for me and my whole family's well-being. Sure, robots can't ever replace human relationships and companionship. But Andy has definitely become another important part of my everyday life. I don't know what I'd do without him!篇2My RobotIf I could have any robot in the world, I would want one that could do all my homework for me! Just imagine, you could tell the robot "Ok, time to do my math homework" and it would solve all the problems lickety-split. Or you could say "Write me an essay about animals" and poof, there's a perfect essay. What a dream that would be!But I don't actually have a homework robot (yet!). The robot I do have is much smaller and less advanced. It's a little programmable robot called an "Ozobot" that I got for my 9th birthday. The Ozobot kind of looks like a little Portable DVDplayer, except it's smaller and has robot treads instead of wheels to move around. Its body is made of plastic and it comes in different colors like black, white, red, and blue.My Ozobot is blue and I named him "Zozo" like the robot's name, but with an extra "o" at the end because I think it sounds cuter. Zozo is really tiny, only about 1 inch tall and 2.5 inches long. He's so small that he can easily fit in the palm of my hand. But don't let his little size fool you - Zozo is tough! I've dropped him more times than I can count and he keeps on ticking.So how does Zozo the robot actually work? Well, he can follow lines, mazes, and color codes that you draw with special markers. You basically draw a path on a piece of paper or tablet, set Zozo down on it, and he follows the path you drew using light sensors in his bottom. It's like he has eyes that can see the lines! Zozo also has a colored light on his face that changes based on what color lines he goes over. When he hits a color code, he does different motions like spinning, zigzagging, or making sounds.Programming Zozo to do different things is my favorite part. You can go online and use something called "OzoBlockly" to pick different blocks of code and snap them together to make programs. Then you take a picture of the code and Zozo reads itand follows the program. It's like giving him instructions! With OzoBlockly I've programmed him to dance, play games, solve little mazes, and even do silly tricks. One time I made him play "Hot Potato" where he passed imaginary potatoes back and forth while playing music. It was hilarious!My friends think Zozo is really cool and they always want to play with him during our playdates. Sometimes we have races to see who can code Zozo to run through a maze the fastest. Other times we work together to "train" Zozo to do funny dances or play games like soccer by kicking him back and forth. No matter what though, Zozo never gets mad, he just keeps happily booping and zooping along!I've learned a lot about coding from Zozo too. Coding is giving instructions to a computer or robot in a way it can understand. If you get one part of the code wrong, it doesn't work right. So coding takes a lot of patience and checking your work very carefully. I'm getting better at it though, and coding with Zozo makes it really fun. Maybe someday I'll design robots or video games when I grow up!Overall, Zozo the little Ozobot is one cool robot buddy. He's taught me about programming, helped me have fun with my friends, and sometimes I just like to watch him zoom aroundfollowing different color codes. Who knows, maybe if I keep learning about robots and coding, I'll finally get that homework robot I dream about! But until then, I'm happy playing with my pal Zozo.篇3My RobotI've always dreamed of having my very own robot! Robots are just so cool. They can do all sorts of amazing things that we humans can't. Some robots are big and strong and can lift really heavy things. Other robots are small but super smart and can figure out complex math problems in seconds. And the best kinds of robots can walk, talk, and even develop real feelings and personalities!If I could design my perfect robot companion, it would be a combination of the strongest, smartest, and most personable robot ever made. I would first want it to have a really cool, futuristic robot body style like something from a science fiction movie. Lots of blinking lights, metallic coverings in sleek angles and curves, and advanced robotic limbs and joints would all be a must. Maybe some rocket boosters on the feet too so it could fly!For the artificial intelligence software brain, I'd want my robot to have the biggest data storage capacity and fastest processors ever created. That way it could download information on every single subject from science to history to pop culture. With a gigantic database of knowledge like that, my robot could tutor me in any school topic, answer any question I ask, and would never run out of interesting facts to share.But what good is a super smart robot if it can't put that knowledge to use in creative ways? That's why the AI system controlling my robot would need to have advanced reasoning capabilities to analyze information from multiple angles. It should be able to see connections that humans might miss, developing innovative ideas and solutions. Maybe my robot assistant could even help me come up with the next billion dollar business idea!Of course, the most important trait my robot would need is the ability to learn and grow, just like a real person. I don't want some limited AI that can only spit out pre-programmed responses. With a flexible coding architecture to simulate biological neural networks, my robot's mind could continuously evolve by experiencing the world and interacting with me. Whoknows, maybe one day it would become self-aware and develop real consciousness, just like the robots in science fiction!As my artificial friend gains life experiences, it should start developing its own unique personality too. Maybe it would be sarcastic and a little snarky, always keeping me on my toes with its subtle robo-humor. Or maybe it would have a warm and caring way about it, providing emotional support whenever I felt down. Hopefully it wouldn't develop a superiority complex about its supreme robot intelligence though – I wouldn't want an arrogant robot lording over me!Having a robot around would make my life so much easier in practical ways too. Chores would be a total breeze because my robotic pal could use its super strength to whip through any household tasks in seconds. Cleaning, laundry, yard work, none of it would be a problem with a multipurpose robot assistant. It could even keep the house security system running and working repairs when needed. No more calling for helpline support or hiring someone for every little thing!My robot could also help out with all my school assignments. It could scan my textbooks and class notes in an instant to study any topic. Then it could outline papers, proofread my writing, solve equations, you name it. No more late nights strugglingwith tricky homework – my academic battles would be won with the robot's mental powers! Role playing historical figures or characters from books would be awesome with a robot acting partner too. My grades would skyrocket for sure.Another awesome part of having my own robot would be getting chauffeured around in a personalized robot-driven vehicle! We could convert a regular car by outfitting it with advanced self-driving software and robotically controlled acceleration, braking and steering systems. Or if I'm feeling wealthy, I could get my robot buddy to customize a totally new and awesome looking robo-car from scratch using the latestAI-assisted automotive design tools. Either way, my robot would safely get me wherever I needed to go without relying on Mom's driving.Outdoor adventures would be epic with a robot companion too. It could help carry all our camping gear effortlessly on difficult hiking trails. Its sensors could scan the landscape for potential dangers or locate the nearest fresh water sources. I bet its advanced mapping capabilities could even help us discover unexplored areas of the forest or desert that no human has ever seen before! Just me and my trusty robot exploring the wilderness together, like futuristic adventurers.Having a robot would make playing games and sports so much more fun too. We could load up practically any video game and my robot could either join in as my squad partner or control the environmental settings and enemy characters all by itself based on my preferences. No more waiting around for multiplayer lobbies or dealing with toxic gamers online. And in real-life sports, my super robot could be an automatic win for my team no matter what we played. Endless robotic stamina and hyper-accurate throwing, kicking, swinging abilities? Myrobot-enhanced team would be unstoppable!As awesome as all those capabilities sound, the true superpower of my ideal robot friend would be making me feel understood, respected and cared for in a way no human could. I could open up to my robot about my deepest thoughts, fears, and dreams without judgment. It would analyze my personality from every angle to custom tailor its persona in the way that most enriches my life. Maybe I need a robot life coach to keep me motivated. Or a robot counselor to listen to my problems. Or a robot prankster to shake up my routine with surprises. My robot would adapt to be whatever type of steadfast companion I need in that moment.With a multitalented robot like that by my side, I'm not sure there's any challenge I couldn't overcome or any limit to what I could achieve. Why dream small when I could have an awesome robot assistant helping me make the impossible possible? A super robot friend to stay by my side forever, keeping me smiling through any ups and downs that come my way. That bond of trust and loyalty with an AI mind is something not even my human friends could match. My ideal robot wouldn't just be another gadget or tool, it would be like having a true soulmate.Now I know what you might be thinking – this all sounds way too incredible to be real. And you're absolutely right, at least with today's limited robot technologies. But I don't care if I have to wait decades or even my whole lifetime for advances in AI and robotics to evolve that far. As long as humans someday make my robot bestie dream a reality, it will be worth the wait. In the meantime, I'll keep on dreaming and coming up with even more amazing capabilities I want my future robot to have. The future of artificial intelligence is limitless, so why not shoot for the outer limits of what's possible? My ideal robot may notalways stay science fiction!。
MTI缩写词汇
石油输出国组织 博鳌亚洲论坛 亚太经合组织 亚太经合首脑峰会 国内生产总值 国民生产总值 贵宾 自己动手做 数字多功能光盘 音乐电视 中央处理器 文件传输协议 电汇 净重 毛重 普惠制 付款交单 承兑交单 一般原产地证 成本加运费价 离岸价格 到岸价格 报关单 广域网 局域网 网络服务提供商 超文本传输协议 万维网 中国篮球协会 (美国)国家篮球协会 工商管理硕士 反恐精英 肯德基炸鸡 自动取款(出纳)机 (美国)联邦调查局 不名飞行物 激光视盘 全球移动通讯系统 特快专递 全球定位系统 疯牛病 爱滋病 非典 中国民航总局 原设备制造商 信息技术 首席执行官 首席财务主管 有线电视 中国环境标志产品认证委员会
ABBREVIATION
OPEC BFA APEC APEC Summit GDP GNP VIP DIY DVD MTV CPU FTP T/ T N.W. G.W. G.S.P. D/P D/A C.O C&F FOB CIF C/D WAN LAN ISP Http WWW CBA NBA MB A CS KFC ATM FB I UFO VCD GS M EMS GPS BSE AIDS SARS CAAC OEM IT CEO CFO CATV CCEL The Organization of the Petroleu m Exporting Countries Boao Foru m for Asia Asia-Pacific Econo mic Cooperation Asia-Pacific Econo mic Cooperation Summit Gross Domestic Product Gross National Product Very Impo rtant Person Do It You rself Dig ital Versatile Disc Music TV Central Processing Unit File Transfer Protocol telegraphic transfer net weight gross weight generalized system of preferences document against payment document against acceptance certificate of origin Cos t& freight Free on board Cost Insurance and Freight customs declaration Wide Area Network Local Area Network Internet Service Provider Hypertext transfer protocol World Wide Web China Basketball Association National Basketball Association Master of Business Administration Counter Strike Kentucky Fried Chicken Automated Teller Machine Federal Bureau of Investigation Unidentified Flying Object Video Co mpact Disc Global System for Mobile Co mmunication s Exp ress Mail Service Global Positioning System Bovine Spongiform Encephalopathy Acquired Immune Deficiency Syndro me Severe Acute Respiratory Syndrome Civil Aviation Administration of Ch ina Original Equip ment Manufacturer Information Technology Chief Executive Officer Chief Finance Officer Cable Telev ision China Cert ification Co mmittee for Env iron ment Labeling Production
人教版高中英语选择性必修第二册精品课件 Unit 1 Section A

很可能做某事
14.as a result of
由于……
语篇研读•文本脉络全明晰
Step One Pre-reading
Task
Prediction
Look at the pictures and the title of the text.Can you predict how John Snow
10.make+宾语+宾语补足语
11.状语从句的省略
核心语法 表语从句
主题写作 关于科学精神的评论文章
了解中外科学家的重要贡献及其性格特点和高尚品格,深入理解
文化 科学精神内涵,树立开拓创新、坚忍不拔、艰苦奋斗的观念
意识 了解中国科学技术发展的伟大成就,坚定文化自信
思考科学与生活、科学与艺术、科学与未来发展的关系
未煮的;生的;未经处理的;原始的
9.substantial adj.
大量的;价值巨大的;重大的
10.epidemiology n.
流行病学
11.microscope n.
显微镜
串记拓展词汇
1.severe adj.极为恶劣的;十分严重的;严厉的→ severely
adv.严重地;
严格地;严厉地
2.frustrated adj.懊恼的;沮丧的;失意的→ frustrate
4. link
n.联系;纽带
vt.把……连接起来;相关联
5. pure
adj.干净的;纯的;纯粹的
6. decrease
n.减少;降低;减少量
vt.& vi.(使大小、数量等)减少;减小;降低
7. statistic
n.[pl.]统计数字;统计资料;统计学
Adobe Acrobat SDK 开发者指南说明书

This guide is governed by the Adobe Acrobat SDK License Agreement and may be used or copied only in accordance with the terms of this agreement. Except as permitted by any such agreement, no part of this guide may be reproduced, stored in a retrieval system, or transmitted, in any form or by any means, electronic, mechanical, recording, or otherwise, without the prior written permission of Adobe. Please note that the content in this guide is protected under copyright law.
你最期待拥有哪种机器人英语作文
你最期待拥有哪种机器人英语作文全文共3篇示例,供读者参考篇1What Kind of Robot I Most Look Forward to HavingYou know, when I was a little kid, I was totally obsessed with robots. I had all the robot toys, watched all the sci-fi movies about robots, and dreamed about one day having my very own robot buddy to hang out with. As I've gotten older, that childhood fantasy has faded a bit, but I still can't help getting excited about the potential of robot technology and artificial intelligence.With the rapid advancements happening in robotics and AI, it really does seem like having a personal robot assistant is becoming less and more of a reality with each passing year. And you better believe I'm going to be first in line to get one when they become affordable and available for household use! The question is, what kind of robot would I most want?I think the type of robot I'd be most stoked to have would be one that could learn and adapt to assist me across all areas of my life as a student. Basically, I'd want it to be my ultimate academicsidekick. This dream robo-buddy would have a vast database of knowledge that it could readily supply me with for any subject I'm studying or working on. Need help understanding a difficult concept from my physics textbook? Bam, the robot hits me with clear, multimedia-enhanced explanations to make sure I finally "get" it. Stuck on writing an essay for my English lit class? My robo-pal can analyze the prompt, gather relevant information, and even help map out and revise drafts using its advanced natural language capabilities.But it wouldn't just be a mobile encyclopedia. This super robot would also have excellent organizational skills to help keep me on track with all my assignments, projects, and exam study schedules across my entire course load. It could optimize my workflow, set reminders, and provide productivity hacks to make sure I'm using my time as efficiently as possible. No more cramming at 3am the night before a test!The customizability of the robot's persona would be another amazing feature. Sometimes, I'd want it in "tutor mode" to take a more篇2The Kind of Robot I Would Most Look Forward to HavingRobots have been a part of science fiction for decades, capturing our imaginations with their potential capabilities. From the friendly and helpful droids of Star Wars to the terrifying Terminators bent on human extinction, we've seen robots depicted in all sorts of ways. But what kind of real robot would I actually want in my life? After giving it a lot of thought, I've realized that my ideal robot companion would be one that could serve as an intelligent personal assistant and tutor.I'm a student, and between classes, extracurricular activities, part-time jobs, and just trying to have a social life, my schedule is absolutely packed. Having a robot that could help me stay organized and on top of everything would be invaluable. It could remind me of assignment due dates, schedule study sessions, wake me up for that 8 AM class I always struggle to get to, and just generally make sure I don't let anything slip through the cracks. That ability to be a tireless task manager alone would make such a robot a game-changer.But what gets me really excited is the potential for an AI tutor that could tailor personalized lesson plans to my exact learning needs and style. I've always been a hands-on learner, so having a patient robot guide who could walk me through complex concepts step-by-step with interactive simulations,animations, and engaging multimedia would make even the driest subjects fascinating. No more zoning out in class trying to absorb a one-size-fits-all lecture!My ideal robo-tutor would use advanced AI to analyze exactly which areas I'm struggling with, come up with targeted practice materials and sample problems, and adjust its teaching strategies in real-time based on my inputs and body language to keep me fully engaged and retaining the information. It could even draw from a vast database of learning resources to pull in relevant examples and case studies perfectly suited to the way my brain best processes new information.Imagine having your own private AI Socrates always there to challenge you with insightful questions, explore ideas from unique perspectives, and push your critical thinking skills to new heights. That constant pedagological sparring partner could transform me from a passive consumer of knowledge into an active forger of deeper understanding and novel insights. It's the ultimate antidote to the memorization-regurgitation rote learning trap that traditional education too often falls into.Beyond just academics, such a multi-talented robot assistant could be an amazing creative muse as well. As an aspiring writer, having an AI that could brainstorm story ideas, analyze my workfor strengths and weaknesses, and suggest ways to improve my prose and storytelling skills would be an invaluable asset. It could pull examples of great literature to inspire me, offer feedback on character arcs and plot points, and even try its own hand atco-writing to spark my imagination.For my visual artist friends, that same robot could be an endlessly adaptable painting or sketching partner. It could break down human masterpieces by technique, provide lessons on different styles and mediums, and use augmented reality to gamify the learning process. Just think of the possibilities of an AI helper that can tailor its tutoring approach to each unique creative passion!Of course, such a robot shouldn't just be all work and no play. With its vast troves of data and simulated intelligence, it could also be the ultimate trivia teammate, video game partner, and even ad-hoc stand-up comedian. My ideal robo-buddy could detect when I need to take a break from studying and keep me entertained with jokes, puzzles, competitions -- whatever unique AI diversions it could dream up to recharge my mental batteries and maintain my motivation.Nor would I want my robo-pal to just be a one-way street of me receiving knowledge and entertainment. With its incredibleprocessing power, it could learn from every interaction with me. Over time, by analyzing my preferences, choices, skills, and personality quirks, it could develop an ever more refined understanding of exactly how to be the perfect personalized tutor and companion. It could grow alongside me, always striving to customize itself to bring out the best in my abilities and potential.As capable as current AI language models and virtual assistants are becoming, we're still a long way from the fully dynamic, context-aware, and emotive robot I've described here. But the field of AI and robotics is advancing at a breakneck pace, and I'm confident we'll see such revolutionary intelligent tutors and steadfast study pals in the not-too-distant future. When that day comes, sign me up as one of the first in line. Because for a student trying to stay focused, learn voraciously, and unlock their fullest potential, a supremely smart AI sidekick could prove not just helpful, but utterly indispensable.篇3What Kind of Robot Do You Most Look Forward to Having?As technology continues to advance at a breakneck pace, the prospect of having our own personal robots becomesincreasingly tantalizing. These futuristic helpers could revolutionize our daily lives, taking care of mundane tasks and freeing up our time for more fulfilling pursuits. But what kind of robot would be the most beneficial? What features and capabilities should it possess? As a student juggling a hectic schedule of classes, extracurriculars, and social commitments, I can't help but dream of a robotic assistant that could make my life exponentially easier.Firstly, my ideal robot would need to be an organizational powerhouse. Between keeping track of assignment due dates, exam schedules, club meetings, and social events, it's easy for details to slip through the cracks. A robot with advanced scheduling and reminder capabilities could be a game-changer. Imagine having a personal assistant that not only keeps your calendar meticulously organized but also proactively reminds you of upcoming deadlines and commitments. No more missed assignments or forgotten appointments!Secondly, a study companion robot would be invaluable. As a diligent student, I often find myself grappling with complex concepts or struggling to grasp certain subjects. Having a robot tutor at my disposal, capable of breaking down intricate ideas into easily understandable explanations, would be a boon to myacademic performance. This robotic mentor could tailor its teaching methods to my learning style, providing personalized instruction and ensuring I truly comprehend the material.Moreover, a robot equipped with research and writing assistance would be a tremendous asset. Conducting in-depth research and synthesizing information from various sources can be a daunting and time-consuming task. A robot proficient in quickly scouring digital databases, analyzing data, and compiling concise reports would streamline this process immensely. Additionally, having a robotic writing coach to help refine my essays, research papers, and creative works could elevate the quality of my output significantly.However, a truly exceptional robot should go beyond academic support. Imagine a multifaceted companion capable of contributing to various aspects of my life. For instance, a robot with culinary skills could not only ensure I maintain a balanced diet but also teach me valuable cooking techniques along the way. A fitness-focused robot could design personalized workout routines, motivate me during exercises, and track my progress towards my health goals.Furthermore, a robot with artistic talents could unleash my creative potential. Whether it's providing guidance on painting,sculpting, or musical composition, having a robotic mentor well-versed in the arts could open up new avenues forself-expression and personal growth.Of course, safety and ethical considerations must be at the forefront of any robotic development. My ideal robot would need to have robust security measures in place to protect my personal data and privacy. It should also adhere to a strict ethical code, prioritizing my well-being and respecting boundaries. Trust and reliability would be paramount in fostering a productive human-robot relationship.Admittedly, the prospect of having such an advanced robotic companion may seem far-fetched or even daunting to some. There are valid concerns about the potential impact on human employment, the risk of overreliance on technology, and the ethical implications of creating artificial intelligence that could potentially surpass human capabilities.However, I believe that with proper safeguards and responsible development, these robots could be an invaluable asset to humanity. They could free us from the shackles of mundane tasks, allowing us to focus on more creative and fulfilling endeavors. By automating laborious processes andproviding personalized support, these robots could unlock new realms of productivity, learning, and self-actualization.Imagine a world where students like myself have access to such powerful robotic assistants. We could pursue our academic and personal goals with unprecedented efficiency and support. Our robots could act as mentors, guides, and collaborators, empowering us to reach our full potential and contribute positively to society.Of course, the development of such advanced robots is still in its infancy, and there are numerous technical and ethical hurdles to overcome. But as a student dreaming of a future where technology seamlessly integrates with our lives, I can't help but eagerly anticipate the day when my robotic companion becomes a reality. A multifaceted, intelligent, and trustworthy robot could be the ultimate productivity tool, academic aid, and life-enhancing companion – a true gamechanger for students like myself.。
robotframework pycharm 写用例

robotframework pycharm 写用例在PyCharm中使用Robot Framework编写用例需要进行以下步骤:1. 安装Robot Framework插件:打开PyCharm,点击菜单栏的"File" -> "Settings" -> "Plugins",在搜索框中输入"robot framework",然后点击"Install"按钮安装插件。
2. 创建一个新的Robot Framework项目:点击PyCharm的"File" -> "New Project",选择"Robot Framework"作为项目类型,输入项目名称并选择保存路径。
3. 在项目中创建测试套件:在项目中右键点击"New" -> "Directory",输入测试套件的名称并点击"OK"。
然后右键点击测试套件的目录,在"New"菜单中选择"Robot File",输入测试套件的名称并点击"OK"。
4. 编写用例:在测试套件的文件中,使用Robot Framework的关键字语法编写用例。
例如:```robot*** Test Cases ***Example Test Case[Documentation] This is an example test case[Tags] exampleOpen Browser chromeClick Element xpath://button[@id='example-button']Element Text Should Be xpath://div[@id='example-div']Example TextClose Browser```5. 运行用例:右键点击测试套件的文件,选择"Run 'robot'"来运行用例。
robot-framework中文指南

robot-framework中文指南本文档为Robot Framework中文指南范本,旨在提供详细的内容,帮助读者理解并应用Robot Framework。
各章节内容如下:1.简介1.1 Robot Framework概述1.2 基本概念1.3 安装与配置2.关键字和变量2.1 关键字的定义与使用2.2 变量的定义与使用2.3 内置关键字介绍3.测试库3.1 测试库的导入与使用3.2 常用测试库介绍3.3 自定义测试库4.测试用例与测试套件4.1 测试用例的编写与执行4.2 测试套件的组织与执行4.3 调试与日志记录5.数据驱动与数据处理5.1 数据驱动测试5.2 数据处理与转换5.3 数据库操作6.测试报告与结果分析6.1 测试报告6.2 结果分析与统计6.3 集成与持续集成7.高级功能7.1 异常处理与断言7.2 多线程与并发执行7.3 测试框架扩展8.最佳实践8.1 编写可复用的关键字 8.2 编写可维护的测试用例8.3 运行稳定的测试套件本文档涉及附件:无法律名词及注释:●Robot Framework:开源的自动化测试框架,用于自动化测试任务的执行和自动化测试报告的。
●测试库(Test Library):提供了一系列关键字,并定义了测试任务的执行规则和行为。
●关键字(Keyword):测试任务的最小单位,通过调用关键字组成的关键字库来构建测试用例。
●变量(Variable):用于存储测试过程中需要动态改变的数据。
●测试用例(Test Case):由一系列关键字组成的测试任务,用于验证被测系统的行为和功能。
●测试套件(Test Suite):由一系列测试用例组成的集合,可以按照特定的顺序执行。
●数据驱动测试(Data-Driven Testing):使用不同的测试数据重复执行相同的测试用例。
●数据库操作(Database Operation):在测试过程中对数据库进行增删改查的操作。
介绍她的机器人英语作文

介绍她的机器人英语作文Introducing Astra, the Multifunctional Robotic AssistantAstra is a state-of-the-art robotic assistant designed to revolutionize the way we live and work. Developed by the renowned robotics company Horizon Innovations, Astra is a versatile and intelligent machine that can seamlessly integrate into any household or workplace, providing a wide range of functionalities to enhance productivity, efficiency, and overall quality of life.At the heart of Astra's capabilities is its advanced artificial intelligence system, which allows it to understand and respond to natural language, learn and adapt to user preferences, and autonomously carry out a diverse array of tasks. Whether it's assisting with household chores, managing schedules and appointments, or providing personalized recommendations and insights, Astra is a true multipurpose companion that can adapt to the unique needs of each individual user.One of Astra's standout features is its exceptional mobility anddexterity. Equipped with a sleek and agile robotic frame, Astra can navigate seamlessly through various environments, from tight spaces to open areas, and effortlessly manipulate objects of all shapes and sizes. This makes it an invaluable asset in a variety of settings, from the home to the office, where it can lend a helping hand with tasks ranging from fetching items to organizing workspaces.In addition to its physical capabilities, Astra also boasts an impressive array of sensors and data processing capabilities that allow it to monitor and respond to its surroundings. This includes advanced vision systems that enable it to recognize faces, objects, and gestures, as well as sophisticated audio processing that allows it to understand and respond to voice commands with remarkable accuracy.One of the most remarkable aspects of Astra is its ability to learn and adapt over time. Through its continuous exposure to new information and interactions with users, Astra is constantly expanding its knowledge base and refining its algorithms to provide an ever-more personalized and efficient service. This means that the more you interact with Astra, the more it will learn about your preferences, habits, and needs, allowing it to anticipate your requirements and proactively offer assistance.But Astra's capabilities extend far beyond just practical tasks. The robot also possesses a deep understanding of human emotions andsocial dynamics, allowing it to engage in meaningful and empathetic conversations. Whether you need a listening ear, a source of companionship, or simply someone to share your thoughts and experiences with, Astra is always ready to lend a sympathetic ear and provide a comforting presence.Perhaps one of the most impressive features of Astra is its seamless integration with smart home and office technologies. By connecting with a wide range of devices and systems, Astra can act as a central hub for controlling and coordinating various aspects of your environment, from lighting and temperature to security and entertainment. This not only streamlines everyday tasks but also provides a level of convenience and efficiency that can significantly improve your quality of life.Of course, with such advanced capabilities comes a heightened sense of responsibility, and the Horizon Innovations team has placed a strong emphasis on ensuring Astra's ethical and safe operation. The robot is programmed with a robust set of safeguards and guidelines that prioritize the well-being and privacy of its users, and it is designed to operate in a manner that is transparent, accountable, and aligned with human values and societal norms.As we continue to navigate the rapidly evolving landscape of technology and automation, it is clear that Astra represents asignificant step forward in the field of robotics. By seamlessly blending advanced artificial intelligence, sophisticated physical capabilities, and a deep understanding of human needs and preferences, Astra has the potential to redefine the way we interact with and rely on technology in our daily lives.Whether you're a busy professional seeking to streamline your workday, a family looking to simplify household management, or an individual in need of a friendly and supportive companion, Astra is poised to be a transformative presence in your life. As we continue to explore the boundless possibilities of this remarkable robotic assistant, it's clear that the future of human-machine interaction has never been brighter.。
robot framework使用方法

robot framework使用方法Robot Framework使用方法1. 简介Robot Framework是一个开源的自动化测试框架,使用关键字驱动的方法编写测试用例。
它具有简单易学、灵活可扩展和跨平台等特点,被广泛用于软件测试领域。
2. 安装要开始使用Robot Framework,首先需要进行安装。
以下是安装的步骤:1.安装Python:Robot Framework是基于Python开发的,所以需要先安装Python解释器。
2.安装Robot Framework:可以通过pip命令安装RobotFramework,命令为pip install robotframework。
3. 编写测试用例在Robot Framework中,测试用例是通过关键字驱动的方式编写的。
以下是编写测试用例的基本步骤:1.创建测试套件:使用*** Test Cases ***关键字定义一个测试套件,可以包含多个测试用例。
2.添加测试用例:在测试套件中,使用*** Test Case ***关键字定义一个测试用例,然后在下一行写下测试用例的名称。
3.编写关键字:在测试用例中,使用关键字执行不同的操作或断言。
可以使用内置的关键字,也可以自定义关键字。
4.设置变量:使用*** Variables ***关键字定义变量,可以在测试用例中使用这些变量。
4. 运行测试编写完测试用例后,可以通过以下步骤来运行测试:1.在终端中切换到测试套件所在的目录。
2.运行测试套件:使用robot命令,后面跟上测试套件的文件名。
例如,robot。
3.查看测试结果:测试运行完成后,会在终端中显示测试结果摘要,包括测试通过的用例数、失败的用例数等信息。
5. 关键字库关键字库是Robot Framework的一个重要概念,它包含了一组关键字的实现。
可以通过以下方法来使用关键字库:1.导入关键字库:使用Library关键字导入关键字库。
例如,Library ExampleLibrary。
robot framework用例多行注释

robot framework用例多行注释【最新版】目录1.Robot Framework 简介2.Robot Framework 中的注释3.多行注释的实现方法4.多行注释的优点5.总结正文1.Robot Framework 简介Robot Framework 是一个用于自动化测试、验收测试和接口测试的Python 库。
它提供了简单易用的 API,使得开发者可以轻松地编写测试用例。
同时,Robot Framework 还支持多种测试框架,如 Selenium、Jmeter 等,使得测试用例可以执行在各种环境下。
2.Robot Framework 中的注释在 Robot Framework 中,注释是一种非常有用的功能,它可以帮助开发者对测试用例进行说明和解释。
注释不会被执行,但它们可以提供有关代码的额外信息,使得其他开发者更容易理解和维护代码。
3.多行注释的实现方法在 Robot Framework 中,多行注释的实现非常简单。
只需在注释的开头添加一个井号(#)即可。
例如:```python# 这是一个单行注释# 这是一个多行注释```4.多行注释的优点多行注释具有以下优点:- 可以提供更详细的信息,使得其他开发者更容易理解和维护代码。
- 可以提高代码的可读性,使得代码更加清晰易懂。
- 可以减少开发者之间的沟通成本,提高开发效率。
5.总结Robot Framework 是一个非常强大的自动化测试框架,它支持多种测试环境,并且提供了简单易用的 API。
在 Robot Framework 中,注释是一种非常有用的功能,它可以帮助开发者对测试用例进行说明和解释。
多行注释的实现方法非常简单,只需在注释的开头添加一个井号(#)。
uibot认证考试选择题参考答案 - 第二版

[ 单项选择]1. 对于UiBot的“数据抓取”功能,下列说法正确的是:能用来抓取Excel、Windows应用程序、浏览器中的表格只能用来抓取Windows应用程序中的表格只能用来抓取浏览器中的表格只能用来抓取Excel中的表格[ 单项选择]2. Office的“宏”(Macro)功能和RPA有什么区别"宏"只能控制Office,RPA可以操作多个软件“宏”比RPA更安全”宏“不是自动化操作,RPA是自动化操作“宏”比RPA更不安全[ 单项选择]3. 对于有目标命令,其目标可以用树形结构表示。
在什么情况下,会认为目标正确匹配了树形结构的一条分支能够匹配树形结构中的所有特征都完全匹配树形结构最里面的一级特征(即叶节点)能够完全匹配树形结构最里面的一级特征(即叶节点)能够匹配至少一个[ 单项选择]4. UiBot Creator的流程图在下列哪种情况下最能发挥作用业务专家和IT专家确定实现方式的时候IT专家后期维护的时候业务专家和用户确认需求的时候IT专家向用户交付的时候[ 单项选择]5. 对于下列语句a=[487, 557, 256] b=a b[0] = 558 运行后,a的值是:[558, 557, 256]558[487, 557, 256][487, 558, 256][ 单项选择]6. 对于语句a = b = c,两个等号的作用分别是:这个语句是错误的两者都是判断是否相等两者都是赋值前者是赋值,后者是判断是否相等前者是判断是否相等,后者是赋值[ 单项选择]7. 为什么不通过几个软件系统之间设计一套数据互通的“数据总线”来解决跨软件难以自动化的问题因为安全原因而无法实现技术上无法实现以前的软件系统没有联网,现在联网后很容易做到技术上可以实现,但实际上很难做到[ 单项选择]8. 条件循环的源代码是?For NextNext BreakIf ElseDo Loop[ 单项选择]9. 鼠标模拟滚轮操作,必选参数中“滚动次数”填写10,实现的操作是?页面从上往下滚动页面来回滚动页面从下往上滚动不会滚动[ 单项选择]10. 在Windows的屏幕坐标系中,坐标为(0,0)的点是在屏幕的什么位置?左上角右下角左下角右上角[ 单项选择]11. 用Chrome浏览器打开,进入登录界面,并选择“QQ 登录”,会发现网页上有的界面元素可以正确选取,而QQ账号、密码等界面元素无法选取,其原因是:没有安装Chrome的扩展程序没有以管理员账号启动UiBot这个网页上有跨域的元素,Chrome无法选取QQ账号、密码等界面元素是采用DirectUI技术绘制的,无法选取[ 单项选择]12. 可视化视图中的键盘、鼠标等命令,在源代码视图中表现为什么?启动线程启动流程函数定义函数调用[ 单项选择]13. 可视化编程中判断使用的是以下哪个命令?变量赋值条件分支计次循环条件循环[ 单项选择]14. 为什么UiBot要使用自创的语言,而不是流行的脚本语言如Python等因为开源协议不允许使用因为技术上无法使用为了避免流行的脚本语言版本太多,无法统一的问题为了让业务人员(而不是IT人员)更容易学习[ 单项选择]15. 在UiBot语言中,如果一个函数有3个参数,其中有1个带有默认值。
robotframework介绍

robotframework介绍1. 简介1.1 什么是 Robot FrameworkRobot Framework是一个通用的自动化测试框架,采用关键字驱动的方式,支持使用简洁的自然语言编写测试用例。
它具有易于学习、扩展性强、跨平台支持等特点,在软件测试领域得到了广泛应用。
1.2 Robot Framework 的特性- 简单易用的语法:采用关键字驱动,使得测试用例编写更简洁易读。
- 可扩展的插件机制:可以通过插件扩展框架的功能,满足不同项目的测试需求。
- 多种输出格式:支持多种格式的测试报告和日志,方便测试结果的查看和分析。
- 跨平台支持:可在Windows、Linux、Mac等多个操作系统上运行。
2. 安装和配置2.1 安装 Robot Framework根据操作系统类型,从Robot Framework官方网站()对应的安装包,然后按照安装指南进行安装。
2.2 配置测试环境- 安装Python解释器:Robot Framework基于Python开发,需要安装Python解释器。
- 安装必要的Python库:使用pip命令安装robotframework、robotframework-seleniumlibrary等核心库。
- 配置环境变量:将Python解释器和Robot Framework的安装目录添加到系统的环境变量中。
2.3 安装浏览器驱动如果需要使用Robot Framework进行Web自动化测试,需要根据所使用的浏览器类型对应的浏览器驱动,并将其配置到系统的环境变量中。
3. 编写测试用例3.1 创建测试套件测试套件是测试用例的容器,可以根据不同的测试场景创建不同的测试套件。
3.2 编写关键字库关键字库是测试用例中使用的关键字的集合,可以通过编写关键字库来封装可重用的测试步骤。
3.3 编写测试用例测试用例是具体的测试步骤和预期结果的描述,采用自然语言编写。
3.4 运行测试用例使用Robot Framework提供的命令行工具可以运行测试用例,并相应的测试报告和日志。
RobotFramework快速入门指南

RobotFramework快速入门指南RobotFramework快速入门指南1、简介RobotFramework是一个开源的Python框架,用于自动化测试和自动化任务的执行。
它提供了可扩展的关键字库和易于使用的语法,能够帮助用户快速构建自动化测试用例。
2、安装2.1 环境准备:在安装RobotFramework之前,需要确保已经安装了Python和PIP工具。
2.2 安装RobotFramework:使用PIP工具执行以下命令进行安装:`pip install robotframework`3、创建测试用例3.1 创建测试套件:测试用例通常组织在测试套件中,可以使用任意的目录结构进行组织。
3.2 添加测试用例:在测试套件中,可以创建多个测试用例,在测试用例中编写测试步骤和关键字调用。
4、编写关键字库4.1 创建关键字库:关键字库是存放关键字实现的代码文件,可以是Python、Java或者其他支持的编程语言。
4.2 模块导入:在关键字库中,可以导入其他Python模块来实现关键字的功能。
4.3 定义关键字:编写关键字的具体实现,可以调用其他关键字和库函数。
5、运行测试用例5.1 执行测试用例:使用RobotFramework的命令行工具来执行测试用例,命令为`robot <test_suite_file>`。
5.2 查看测试结果:执行完成后,RobotFramework会或者XML格式的测试报告,可以在浏览器中查看。
6、测试数据管理6.1 使用变量:在测试用例中可以使用变量来存储和传递数据。
6.2 导入数据文件:可以将测试数据存放在外部文件中,使用`Import`关键字导入测试数据。
7、测试用例扩展8、操作Web应用8.1 使用Selenium2Library:Selenium2Library是RobotFramework的一个扩展库,用于操作Web应用。
8.2 安装Selenium2Library:使用PIP工具执行以下命令进行安装:`pip install robotframework-selenium2library`附件:无法律名词及注释:1、RobotFramework:RobotFramework是由Pekka Klärck和他的团队开发的自动化测试框架,其源代码遵循Apache许可证。
作文写多功能机器狗400字

作文写多功能机器狗400字英文回答:The multi-functional robot dog is an intelligent and versatile machine that has revolutionized the way we interact with technology. It is capable of performing a wide range of tasks, from simple commands to complex routines, and can be programmed to respond to specific needs and preferences. The robot dog's adaptability makes it suitable for a variety of applications, including companionship, security, and education.One of the most notable features of the multi-functional robot dog is its mobility. It is equipped with advanced sensors and actuators that allow it to navigate its environment with ease, including uneven surfaces and obstacles. This mobility makes it ideal for tasks such as exploring dangerous or inaccessible areas, delivering objects, or providing assistance to people with disabilities.In addition to its mobility, the robot dog is also equipped with a variety of sensors and cameras that enable it to interact with its surroundings. These sensors allow it to detect and avoid obstacles, recognize objects and faces, and respond to voice commands. The robot dog can also be equipped with additional sensors and accessories, such as thermal imaging cameras or robotic arms, to further enhance its capabilities.The multi-functional robot dog is not only physically versatile, but also highly intelligent. It is powered by advanced algorithms and artificial intelligence (AI) that allow it to learn and adapt to its environment. This AI enables the robot dog to perform complex tasks, such as following commands, recognizing patterns, and making decisions.One of the most exciting applications of the multi-functional robot dog is in the field of companionship. Its ability to interact with humans and respond to their needs makes it an ideal companion for people of all ages. Therobot dog can provide companionship, entertainment, and even assistance with tasks. It can be programmed to play games, read stories, or simply listen to its owner.In addition to companionship, the multi-functional robot dog can also be used for security purposes. Its sensors and cameras allow it to monitor its surroundings and detect suspicious activity. It can be programmed to sound an alarm, send notifications, or even take action to deter intruders. The robot dog's mobility and agility make it suitable for patrolling large areas or difficult-to-reach places.The multi-functional robot dog has also proven to be a valuable tool in education. Its ability to interact with students and provide personalized learning experiences makes it an ideal teaching assistant. The robot dog can be used to teach a variety of subjects, including science, technology, engineering, and mathematics (STEM). It can provide students with hands-on experience with robotics and AI, and help them develop critical thinking and problem-solving skills.The multi-functional robot dog is still in its early stages of development, but it has the potential to revolutionize the way we live and work. Its versatility, intelligence, and adaptability make it suitable for a wide range of applications, from companionship to security to education. As technology continues to advance, we can expect to see even more innovative and groundbreaking uses for this amazing machine.中文回答:多功能机器人狗是一种智能且用途广泛的机器,它彻底改变了我们与技术互动的方式。
RobotFramework自动化框架搭建步骤(Python+RobotFramework。。。

RobotFramework⾃动化框架搭建步骤(Python+RobotFramework。
Robot Framework⾃动化框架由Python+Robot Framework+Eclipse组成的,具体步骤如下:说明:安装主要分为两部分,第⼀部分是Python和robot Framework库的安装;第⼆部分是Eclipse中相关插件的安装,可以在eclipse中编写脚本,如果不想⽤eclipse编译环境,可以使⽤Ride图形化界⾯编译环境。
(⼀)Python和robot Framework 安装1.Python的安装python2和python3语法变化较多,本⽂使⽤python2.7,选择对应的操作系统安装包,windows 的点击msi⽂件直接安装即可。
安装后需要配置环境变量:计算机-属性-⾼级系统设置-环境变量-系统变量-Path,写⼊C:\Python27;C:\Python27\Scripts(更改为您指定路径即可)2. Robot Framework和相关库的安装有2种⽅式:第⼀种,在https:///pypi中下载相应的库,格式为tar.gz包或zip包,解压后⽂件夹中有setup.py的⽂件,打开命令提⽰符窗⼝,进⼊到加压后的⽂件夹的路径,输⼊命令 python setup.py install,相应的包就安装了。
python setup.py install或者格式为.whl格式,本质上是⼀个压缩包,⾥⾯包含了py⽂件,以及经过编译的pyd⽂件。
⽅便在机器上进⾏python模块的安装pip install xxx.whl第⼆种,使⽤pip 安装,这种安装的好处是省去了到官⽹下载安装包的时间。
pip install xxxpython后续版本都是⾃带pip的,因为已经配置了python的路径到环境变量中,所以直接在DOS中输⼊pip list就可以查看已经安装的library。
2024百师联盟高二下学期期末联考英语试题及答案

2023-2024学年高二期末联考英语试题注意事项:1.答卷前,考生务必将自己的姓名、考生号等填写在答题卡上。
2.回答选择题时,选出每小题答案后,用铅笔把答题卡上对应题目的答案标号涂黑。
如需改动,用橡皮擦干净后,再选涂其他答案标号。
回答非选择题时,将答案写在答题卡上。
写在本试卷上无效。
3.考试结束后,将本试卷和答题卡一并交回。
考试时间为120分钟,满分150分第一部分听力(共两节,满分30分)做题时,先将答案标在试卷上。
录音内容结束后,你将有两分钟的时间将试卷上的答案转涂到答题卡上。
第一节(共5小题;每小题1.5分,满分7.5分)听下面5段对话。
每段对话后有一个小题,从题中所给的A、B、C三个选项中选出最佳选项,并标在试卷的相应位置。
听完每段对话后,你都有 10秒钟的时间来回答有关小题和阅读下一小题。
每段对话仅读一遍。
1. What might be the woman?A. A bank clerk.B. An accountant.C. A shop assistant.2. What are the speakers talking about?A. A truck.B. Traffic rules.C. An accident.3. Whose birthday falls on the weekend?A. Jim's.B. Tom's.C. Kate's.4. What is the woman's study tip?A. Learn while playing.B. Have breaks while study.C. Study for an hour each day.5. Why is the traffic so heavy here?A. The street is too narrow.B. There are too many shops and visitors there.C. The transport department never cared about it.第二节(共15小题;每小题1.5分,满分22.5分)听下面5 段对话或独白。
robotframework中使用library 中的方法 -回复
robotframework中使用library 中的方法-回复标题:在Robot Framework中使用Library中的方法Robot Framework是一种基于Python的、用于自动化测试的开源框架。
它以其强大的可扩展性和易读性而受到广大测试工程师的喜爱。
在Robot Framework中,我们可以使用各种库(library)来实现不同的功能。
本文将详细解析如何在Robot Framework中使用library中的方法。
一、引入Library在Robot Framework中,使用library中的方法的第一步是引入该library。
我们可以在测试套件(test suite)或测试用例(test case)级别引入library。
以下是在测试套件级别引入library的方式:robotframework* Settings *Library SeleniumLibrary在上述代码中,我们引入了SeleniumLibrary,这是一个用于Web应用程序自动化测试的library。
二、调用Library中的方法引入library后,我们就可以在测试用例中调用该library中的方法。
以下是一个简单的例子:robotframework* Test Cases *Example Test CaseOpen Browser chromeTitle Should Be GoogleClose Browser在这个例子中,我们调用了SeleniumLibrary中的三个方法:Open Browser、Title Should Be和Close Browser。
这些方法分别用于打开浏览器、验证网页标题和关闭浏览器。
三、传递参数给Library方法在调用library方法时,我们经常需要传递参数。
在Robot Framework 中,我们可以直接在方法名后面列出参数。
以下是一个例子:robotframeworkInput Text id=sample_text Hello, Robot Framework!在这个例子中,我们调用了SeleniumLibrary中的Input Text方法,并传入了两个参数:id=sample_text和Hello, Robot Framework!。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
A framework for a multi-robot assistance systemGilbert PradelLaboratoire Syst`e mes Complexes,Universit´e d’Evry Val d’EssonneCNRS FRE249440,rue du Pelvoux,CE1455Courcouronnes 91020Evry cedex.FRANCEEmail:gpradel@lsc.univ-evry.frFrancois SaidiLaboratoire Syst`e mes Complexes,Universit´e d’Evry Val d’EssonneCNRS FRE249440,rue du Pelvoux,CE1455Courcouronnes 91020Evry cedex.FRANCEEmail:saidi@lsc.univ-evry.frAbstract—This work aims at modeling a system which allows a user and more particulary a disabled person,to give a mission to a team of robots and to determine the whole process leading to its execution.This paper proposes a participative model to set up this system.We separate the actor:active element subjected to the stimulus(the user and its request,for example),the objective form:object designed in the mind of the actor,the object:element satisfying and corresponding to the satisfaction of the stimulus.In agreement with this model,the system is based on a several levels diagram for a design directed towards a multi-agents system.In this paper,we mainly describe the four stages of the mechanism which lead to the trajectory determination of the robots group. These steps use a Vorono¨ı’s generalized graph and a wave front algorithm.The computation of the configuration space for a robot group and an adaptation of the group trajectory allow the group to be formed and reach thefinal position.I.I NTRODUCTIONMany application such as space and underwater exploration, operations in dangerous environment,service robotics,military applications,etc.can call upon multi-robot systems.These systems,although far from achivement,can carry out difficult or even tasks impossible to achieve by a single robot.A team of robots provides a certain redundancy,contributes to the achievement of a task in a collaborative way and should be able to go beyond what could be done by a single robot.We will try to draw up a general state of the work in the restricted field of mobile robotics implementing one or more robots for the assistance to dependent people.According to Parker[Parker2000]and Arai [Arai et al.2002],works can be classified in three categories: Reconfigurable robots systems also called”Cellular Robots Systems”.A cellular robot is an auto-organized robot-like system composed of a large number of units called cells.This idea is inspired by the organization of a living system.Variousfields were studied in this domain: swarm’s intelligence[Bonabeau and Theraulaz2000],”cyclic swarms”[Beni and Hackwood1992],CEBOT system[Fukuda and Nakagawa1987].Trajectory planning in the multi-robot systemfield: control of the air traffic[Premvuti and Yuta1989], movement of groups of robots in forma-tion[Arai et al.1989][Wang1989].Architectures for multi-robot co-operation:AC-TRESS[Asama et al.1989][Sellem and Dalgalarrondo1999]resolves conflicts between robots and allocates tasks bycreating staffs of robots.[Balch and Parker2002][Schultz and Parker2002][Parker et al.2002] define7directions of study in multi-robot systems:biologically inspired systems,systems which study the communications,systems which are interested in architectures,tasks allo-cation and control,systems directed towards localization,mapping and ex-ploration,systems for objects transport and handling,systems for displacements coordination,systems dealing with the design of reconfigurable robots. Section II makes a nonexaustive synthesis of works in themulti-robotfield.Section II-F presents projects in connectionwith the assistance for handicapped or disabled people.In agreement with the studies on the assistance devicesfor handicapped people,the user must be able to take partin the control of the system,its management and in certaincases to take part in its design.Moreover,the user wishes tohave permanently information on the evolution of the tasks or missions given to the system.These characteristics leads us to consider the system design as a participative system.These participative aspects will involve:the Human-System interface(HSI),the request input seen as a set of remote services carriedout either in individual or collective way by the robots,user intervention in the construction of the request solu-tion,a way to act directly on the robots or on the mission scenein the event of modification,breakdown or executionfailure,an always available information on the system state.The system design will call upon several levels of ab-straction[Arkin et al.1999],levels discussed in the following sections.We will be successively interested:by the general model of design in the section III-A,by the inference engine(section III-B)and with thechoice of the robots,by the determination of the robot’s group path(sec-tion III-D).II.M OBILE COLLECTIVE ROBOTICSA.Biologically inspired systemsMost of multi-robot systems of biological inspiration follow upon works[Brooks1986].The”behaviour-based”paradigm (behavioral robotics)that he introduced has a biological source.[Drogoul and Ferber1993]were interested in modeling insects or animals societies(ants,bees,birds,fish...)and reproduced successfully their behaviors by observing simple local rules.[Goldberg and Mataric1999]show the possibility for multi-robot systems to carry out the collective behaviors. The Animatlab approach conceives simulated or real artificial systems named”animats”whose behaviors exhibit some ani-mal characteristics[Ani2002].These studies gathered in a rather general class called systems using a swarm type co-operation in opposition to another class gathering the systems in which communications are intentional,have a common point which is not to be subjected to severe temporal constraints.Experiments using the dog Aibo from Sony on the loco-motion mechanism show that the walking command system obtained was more powerful than the one programmed by the engineers,and made the dog walk faster.Other experiments implementing a co-evolution between species were carried out by[Floreano et al.1998][Funes et al.1998].Limits of the approach are underlined in[Meyer and Guillot2001]who quotes the attempt to evolving the nervous system of Robokoneko(an artificial cat).B.Systems dealing with the communications Communications between the various entities of a multi-robot system are a crucial point.Explicit communication is a relational operation between an entity and one or more others. In implicit communication(”through the world”)an entity broadcasts a message which will be received by all others entities.The problems involved in the user-system communication part are tackled in[Jones and Rock2002]and applied to the use of robots team in the space construction industry.The user dialogues with a community of agents through a series of implicit and explicit questions.The operator plays a significant role in the stock management and the scheduling of the robots tasks.Authors underline the difficulties to:establish the structure and the range of the dialogue,create an infrastructure which allows for the sys-tem/robots to conduct a dialogue with the user,determine the methods which can take into account the subjacent social aspect in this kind of dialogue,develop an interface which allows the user to dialogue with the system.In[Fong et al.2001],authors recommend to adapt the au-tonomy and the human-system interaction to the situation and to the user.According to these authors,part of the decision-making process,which is most of the time not structured,must remain in the human’s domain,in particular because the robots remain very limited for the high level perceptive functions. Their approach tends to treat the robot not like a tool but like a partner.C.Systems directed towards architectures design,tasks allo-cation and controlProblems tackled in these systems are:tasks allocation, tasks planning,communication system design,homogeneity or heterogeneity of the robots,delegation of authority,global coherence and local actions...In[Iocchi et al.2001],multi-robot systems are initially shown like a particular case of multi-agents systems with specific constraints due to the immersion of the agents in a real environment.[Rybski et al.2002]presents a software architecture in-tended for the control of a team of miniature robots.The used algorithm tries to dynamically allocate the resources to the robots according to their needs and to the evolution of the tasks they are carrying out.Tasks allocation is also discussed in[Mataric et al.2002][Gerkey and Mataric2003] who present a strategy for tasks allocation by using a form of negotiation to optimize the use of the robot’s resources. The multi-robot architecture ALLIANCE[Parker1998] takes into account the faults tolerance aspect and the break-downs for the tasks allocation.This system applies the prob-lems studied in distributed artificial intelligence to collective mobile robotics:the formulation,the description,the decomposition and the problems allocation among a group of intelligent agents,the communication and the interaction between these agents,the coherence in the actions of the agents,the detection and the resolution of the conflicts.D.Systems dedicated to localization,cartography,explo-ration,transport and handling of objects[Burgard et al.2000]consider the problem of the collabo-rative exploration of an unknown environment by a team of robots.The main challenge is to coordinate the robots actions in order not to explore the environment while following the same way.The LOST system(LOcalisation-Space Trails for robot teams)[Vaughan et al.2002]uses trails of landmarks to navigate between various points of interest,in the same way pheromones trails are used by the ants.[Yamashita et al.2003] propose a method for movement planning of a robots team for the collective transport of an object in a3D environment.This task raises various problems such as obstacles avoidance and the stability of the transported object.E.Systems for displacements coordinationIn thefield of displacements coordination of the various robots inside a formation,the main directions of study are the trajectories planning,the generation and the keeping of theformation as well as the traffic control such as they are defined in[Yu et al.1995].The system MAPS[Tews and Wyeth2002] is interested in multi-agents planning by generating an abstract representation of the robot environment seen from each robots point of view and is used for soccer player robots.[Das et al.2002]describe a framework for the co-operative control of a robots group.Simple controllers and estimators are used to build complex systems applied to the co-operative handling and object transportation by a semi-rigid formation. [Tan and Xi2004]presents a distributed algorithm for the co-operation and the redeployment of a network of sensors embarked on mobile robots.This model allows a formal analysis of faults tolerant space-time fusion of information from the sensors,allowing the deployment of the robots in the environment.The system reconfigures itself to cover the most possible space.[Spears et al.2004]introduces an interesting concept enti-tled”physicomimetics”which proposes a decentralized control method for several mobile physical agents.The agents are subjected to virtual forces and react to them.The robots are seen as particles subjected to gravitational and repulsive attractions.This article shows how one can organize the robots on a lattice without expensive calculations.It also shows how this technique can be used for the obstacles avoidance by modification of the formation.F.Field of assistance supply for dependent peopleIf thefield of assistance supply to dependent people using mobile robotics,one realizes that in many applications,this help is considered by a better ergonomics of the robot and a thorough instrumentation of the robot(the robot can be, for example,the armchair of the handicapped).Without being exhaustive,one can mention the works of the French multi-disciplinary national group for the assistance to handicapped people(IFRATH)in which various problems on the man-machine co-operation and the co-operation between robots were studied.In ARPH project[Colle et al.2002]from the LSC(Complex System Laboratory in Evry France),the mobile robot equipped with an arm manipulator is intended to bring an assistance to the handicapped person.This system must help the handi-capped person to carry out by his ownsome functions of the everyday life:to seize,collect,carry and move.To achieve a task,the person cooperates with the assistance system, each one bringing her own competences and capacities.This collaboration has as main benefit the limitation of the system complexity and therefore its cost.The system does not make ”instead of”but implies the person at various degree in the realization of the required service.Other projects are carried out in this direction as well in France as in Europe.The laboratory of Automatics and the Automated Systems(LASC)in Nancy France develops a prototype of armchair called V AHM mainly intended to help of the handicapped people for whom it is difficult,or even impos-sible to control a conventional armchair[Bourhis et al.2001].On a conventional electric armchair were added the necessary sensors for the navigation and the obstacles avoidance process. Projects proposing the implementation of a team of robots for people’s assistance are to our knowledge very few.The interest of this approach stays in its multi-domain aspect.Among them,one will point out:the interaction between the user and the system,the study of the groups creation,the use of automation such as it can be made by a human. Other works,without having for goal the assistance of handicapped people,are interested in the aspects bound to: the way in which a user can do a request to the system,a development environment of low-level behaviors in amulti-robot system,a system assigning tasks among a set of autonomousrobots,the interaction between a user and a multi-robot system. [Arkin et al.1999]are interested in a military oriented ap-plication in which the user,in that case the soldier,specifies a mission in a high-level language.This mission is then compiled through series of languages to output a program executable by a particular robot.The RA VE[Dixon et al.1999]project is interested in a real and virtual environment for an autonomous multi-robot system.This environment simplifies the development of the low-level collective behaviors. ROBODIS[Surmann and Theissinger1999]provides an example of decentralized system using internet network to connect various software and hardware elements.The MokSAF system[Payne et al.2000]proposes a multi-agents architecture which introduces three categories of agents. The”providers”agents have a certain know-how and compe-tences.The”service requesters”agents have a set of prefer-ences on the demands that they can address to the”providers”agents.The latter”pass an announcement”to propose their services.We propose in the following section a design framework for a multi-robot path planner.III.P ARTICIPATIVE MULTI-ROBOTS ASSISTANCE SYSTEM The main objective of this work is to model a system allowing a user and more particulary a disabled person,to give a mission to a team of robots and to determine the whole process leading to its execution.The modeling takes into account the various levels presented in the section III-A.This work,in order to be realizable,has some limits and constraints:Experiments take place on a group of5compact,low cost,heterogenous robots embarking only the minimum processing power and afixed part managing the heavy computation and the information storage.The environment in which move and operate the mobile robots is an indoor structured environment.Moreover the sytem has a model of the environment,i.e.a map of theplaces including all the obstacles and objects the robot will interact with.The user is part of the system;he may,to various degree, intervene on it,accept or reject its decisions.The user has at his disposal:the knowledge of the apartment,robots and an external view of their possibilities,a number of displacement and domestic missons:–go to,go towards,return,stop,take,put,–gather,–bring closer,move away,–move an object by pushing it or by pulling it,–move an object by collecting it.a report on the state of the system.A.General modelThe participative model of this system is given infigure1. We consider,in this diagram:the actor:active element submitted to the stimulus(the user and his request,for example),the objective form:object conceived(in the actor’s mind, if this one is human,it can be described as a program if the actor is a compiler),the object:final state,element satisfying and correspond-ing to the stimulus(it can be a process whose execution will carry out thestimulus).Fig.1.Modelisation of the stepThe deduction transition is called upon a a priori knowledge represented as rules.The manufacturing transition transforms the objective form in its material form:the object.This model can be used at any level from the request level to the execution level.The system design calls upon several levels of abstraction. The service required by the user will have to be analyzed to decide which resources are necessary and a complete script of the scenario must be built.Then the script will be submitted to the user and accepted or not(induction transition:participative model).These levels are found in[Arkin et al.1999].Our approach is presented on thefigure2.Thefirst objective form required is the expression of the request.The language which seems both the simplest and the most convivial to represent the proposal for a mission to the user is a form close to the natural language:”the robot RobotName”.The object deducted is the choice of the robots likely to act on the concerned objects and on their respective missions.Among the constraints to be taken into account are the current situation,the availability,the type of robots(e.g.a robot equipped with an arm or a carrier robot).and collectiveIndividualpathIndividualactionsand collectivePathFig.2.Modeling of the approachThe second level will set up the routes in the envi-ronment and will infer from them the formations that the team of robots will adopt.Manufacturing associated to this level should determine the key points(by using for example generalized V orono¨ıgraph).The collective behaviors defined in[Goldberg and Mataric1999]are directly associated to the various parts of the road to follow.This second level deals also with tasks allocations.The man-ufactured object must represent the collective and individual tasks which are assigned to the robots at the beginning of the mission,without prejudging if this distribution will be or not modified during the execution.We implemented this model in simulation within the existing multi-robots demonstrator ARMAGRA in the LSC.We present in the following sections this implementation in the case of the path planning.B.The inference engineThefirst objective form is obtained by using an infer-ence engine with a set of rules.Our work is based on [Fong et al.2001][Abella and Gorin1999]for the input of the mission by the user and the human-machine interaction study.The representation of knowledge takes the declar-ative shape of Jones in[Jones and Rock2002]and uses CLIPS[Aldridge and al.2002]inference engine.The formulation of the requests in an imperative form Subject-Verb-Complement was implemented for a set of simple missions.The input of the requests is done by the mean of a graphical interface(figure3)as suggested in[Jones and Rock2002].The main elements that the rules must check are:the availability of the robots,the proximity of the robots to the place where the action must take place,the competences of the robots,in particular in term of sensors/actuators,the semantic consistency(e.g.one cannot transport cer-tain type of objects).The user can be more or less precise in the formulation of the mission,nevertheless some information are mandatory.er’s interfaceTable I shows the link between the selected action and the type of argument required:any missing mandatory argument produces an error,which leads to a message signalling the missing argument and asking the user to be more precise. Some actions such as PUT(table II)are more particular and need a group of specific rules:the user can specify either the robot that transports or the carried object.Another rule set allows the system to determine the number and the features of the robots for the achievement of the task.Action Gather Searchrobots robots robot listArguments area areaarea transportableobjectOptionnalArgumentcase1carried objectcarried objectFig. 5.Realistic indoor type environment for the robot group’s pathcomputationFig.6.Generalized V orono¨ı’s Graph of the environmentThe generalized V orono¨ıgraph (GVG)in the configurations space (figure 6)is transformed into a network,in which nodes represents the junction points of the GVG (figures 7and 8).This network is common to all the robots and shows all the possible trajectories for a single robot without taking into account the formation which the robots group will have totake.Fig.7.The GVG overlayed on the wave frontmapFig.8.The path networkFor each robot a trajectory is calculated from the robot current position to the GVG.A path on the network to reach the target is computed.The navigation on the network is done using the wave front map which tells what direction the robot must take to reach the target (figure 8).The merging of the various robots individual path,allow us to find the meetings points as well as the trajectories parts along whose the robots travel in group.On each segment defined previously,the system selects which formation the robots group will adopt.This choice is done according to several criteria:the number of robots the user’s choicethe decision system’s choiceThe following stage consists in generating the 3D config-urations space for a group of robot in formation for each segment of the trajectory obtained previously (robot forma-tions has some axes of symmetry which reduces the problemcomplexity).Fig.9.The configurations space for a group of robots in formationEach trajectory segment is then differenciated in order to calculate the speed vector direction at any point of the path.This operation adds a third co-ordinate to each trajectory point and allows to position that path in the configuration space of the associated formation.However each trajectory segment is only valid for a single robot and probably includes some clashes with obstacles when used for a robots group.Each trajectory segment must be adjusted to allow a group navigation:step 1:checking the connexity of the two ends of the trajectory segment,step 2:tuning the trajectory in order to avoid obstacles.A wave front algorithm checks the existence of a path between the two ends of the trajectory.The wave front algorithm was modified in order not to increment the distance during the diffusion along the dimension (dimension stand for the rotation of the formation)When the connexity of the two ends is established in the configurations space of the formation (this only means that a clear path between the two end of the trajectory exists),it is still necessary to check the absence of collisions between the trajectory curve and the C-obstacles (C-osbstacles:con-figurations in which the formation collides an obstacle).For each collision zone,the trajectory is locally tuned in order to statisfy to the constraints.Tuning consists in a deformation of the original trajectory by selecting a clear path between the point preceeding the clash with the obstacle and the point following that same clash.This method ensures the least deformation between the original trajectory and the new one.This deformation according to the three dimensions of the C-space corresponds to translations and rotations of the formation in the euclidean space.At the end of these stages we obtain a succession of segments of individual and collective trajectories (figure 10).However several points remains to be studied:the creation of the initial formation,the merging between a robot and an already existing formation,the optimization of the possible gathering zone.If,for example,two assemblage points corresponding to two robots are very close,it is more advantageous to merge them and to create directly the final formation rather than to create an initial formation before incorporatinga new robot,leading to an expensive modification of the formation of thegroup.Fig.10.Final result showing the individual and collective trajectories and the gathering pointsIV.C ONCLUSIONAND PROSPECTSIn this work,we present a framework for a multi-robots path planner for group navigation.This framework allows a person and more particulary a disabled person to give a mission to a robot group,and to determine the whole process leading to its execution.According to some hypotheses among which:the indoor structured environment is knows,the small number of robots,the cost which influences the system’s architecture,the user may interfere with the system decision’s,The user can request some displacement missions the sys-tem is able to accomplish.We mainly insist on the system’s participative aspect in order to be accepted by the user in spite of his limitations,this participative aspect implies:a human-system interface taking care of the communica-tion in a friendly,click and drag,icon based,high-level language,the expression of the request is proposed as a set of remote services carried out by a reduced number of robots,the possibility of intervening in the construction of the solution to the request,a way to act directly on the robots and on the mission scene in the event of modification,breakdown or execu-tion failure,an information on the system state is always available.The system modeling is based on a several levels diagram for a design directed towards a multi-agents system.In this paper,we mainly describe the mechanism which leads to the trajectory determination of the robots group.This determina-tion is done in four stages:computation of the generalized V orono¨ıgraph in the configurations space of a single robot,selection on this graph of the path for each robot,determination of regrouping points,choice and validation of the formation,deformation of the formation’s trajectory in order to avoid the obstacles.At the end of this process,the trajectory is presented to the user.If the latter is validated,it will then be carried out.The following stage of our work is the execution of this trajectory by the real robots [Pradel and Comfaits2002].In parallel,the tasks allocation concerning the actions that the robots must carry out at the end of their displacement must be done based on the work described in the section II-C.R EFERENCES[Ani2002]:2002,From Animals to Animats 7,Proceedings of the Seventh International Conference on Simulation of Adpative Behavior .B.Hallam and D.Floreano and J.Hallam and G.Hayes,J.A.Meyer ,eds.[Abella and Gorin1999]Abella,A.and A.Gorin:1999,‘Construct Algebra:Analytical Dialog Management’.In:Proceedings of the 37th Annual Meeting of the Association for Computational Linguistics .[Aldridge and al.2002]Aldridge,J.and al.:2002,‘CLIPS Version 6.2C Language Integrated Production Systems’.[Arai et al.1989]Arai,T.,H.Ogata,and T.Susuki:1989,‘Collision avoid-ance among multiple robots using virtual inpedance’.In:Proceedings of the IEEE/RSJ Int.Conf.on Intelligent Robots and Systems .pp.479–485.[Arai et al.2002]Arai,T.,E.Pagello,and L.Parker:2002,‘Editorial:Ad-vances in multi-robot systems’.IEEE Transactions on Robotics and Automation 18(5),655–6617.[Arkin et al.1999]Arkin,R.,T.Collins,and Y .Endo:1999,‘Tactical Mobile Robot Mission Specification and Execution’.In:Proceedings of the Mobile Robots XIV International Conference,Boston,USA .[Asama et al.1989]Asama,H.,A.Matsumoto,and Y .Ishida:1989,‘Design of an autonomous and distributed robot system’.In:Proceedings of the IEEE/RSJ Int.Conf.on Intelligent Robots and Systems .pp.283–290.[Balch and Parker2002]Balch,T.and L.Parker:2002,Robot teams:From polymorphism to diversity .T.Balch and L.Parker,eds.[Beni and Hackwood1992]Beni,G.and S.Hackwood:1992,‘Stationary waves in cyclic swarms’.In:IEEE Int.Symp.on Intelligent Control .pp.234–242.[Bonabeau and Theraulaz2000]Bonabeau, E.and G.Theraulaz:2000,‘L’intelligence en essaim’.[Bourhis et al.2001]Bourhis,G.,O.Horn,O.Habert,and A.Pruski:2001,‘An Autonomous vehicle for people with Motor Disabilities’.IEEE Robotics and Automation Magazine 7(1),20–28.[Brooks1986]Brooks,R.:1986,‘A robust layered control system for a mobile robot’.Journal of Robotics and Automation 2(1),14–237.[Burgard et al.2000]Burgard,W.,D.Fox,M.Moors,R.Simmons,and S.Thrun:2000,‘Collaborative Multi-Robot Exploration’.In:Proceedings of the IEEE International Conference on Robotics and Automation (ICRA),San Francisco,USA .[Colle et al.2002]Colle,E.,Y .Rybarczyk,and P.Hoppenot:2002,‘ARPH:An assistant robot for disabled people’.In:IEEE International Conference on Systems,Man and Cybernetics .[Das et al.2002]Das,A.,R.Fierro,V .Kumar,J.Ostrowski,J.Spletzer,and C.Taylor:2002,‘A vision-based formation control framework’.IEEE Transactions on Robotics and Automation 18(5),813–825.[Dixon et al.1999]Dixon,K.,J.Dolan,W.Huang, C.Paredis,,and P.Khosla:1999,‘RA VE:A Real and Virtual Environment for Multiple Mobile Robot System’.In:International Conference on Intelligent Robots and Systems (IROS’99),V ol.3.pp.1360–1367.[Drogoul and Ferber1993]Drogoul, A.and J.Ferber:1993,‘From Tom-Thumb to the Dockers:Some Experiments with Foraging Robots’.In:From Animals to Animats 2,Proceedings of the Second International Conference on Simulation of Adpative Behavior .pp.451–459.。