一种改进的种子填充算法
案例10 扫描线种子填充算法
程序代码
PointTemp.x=xleft;PointTemp.y=PointTemp.y-2; //处理下一条扫描线 while(PointTemp.x<xright) { bSpanFill=FALSE; while(pDC->GetPixel(Round(PointTemp.x),Round(PointTemp.y))!=BoundaryClr && pDC->GetPixel(Round(PointTemp.x),Round(PointTemp.y))!=SeedClr) { bSpanFill=TRUE; PointTemp.x++; } if(bSpanFill) { if(PointTemp.x==xright && pDC->GetPixel(Round(PointTemp.x), Round(PointTemp.y))!=BoundaryClr && pDC->GetPixel(Round(PointTemp.x),Round(PointTemp.y))!=SeedClr) PopPoint=PointTemp; else PopPoint.x=PointTemp.x-1;PopPoint.y=PointTemp.y; Push(PopPoint); bSpanFill=FALSE; } while((pDC->GetPixel(Round(PointTemp.x),Round(PointTemp.y))==BoundaryClr && PointTemp.x<xright) || (pDC->GetPixel(Round(PointTemp.x),Round(PointTemp.y)) ==SeedClr && PointTemp.x<xright)) PointTemp.x++; } }
一种基于位存储的种子填充算法
第2 4卷第 2 期
20 0 8年 4月
呵 方学院学 (然 学 ) ' 自 科 版
J u n l f He e r h Un v r i ( t r l ce c iin o r a b i o No t i e st y Na u a in e Edto ) S
Vo . 4 No 2 12 .
Apr 0 .2 08
一
种 基 于 位存 储 的种 子 填 充 算 法
胡 云
( 锡市广播电视大学,江苏 无锡 241) 无 1 0 1
摘 要 :为 了提 高 利 用 种 子 填 充 算 法 对 区 域 填 充 的效 率 .主要 方 法 是 改 进 基 本 的算 法 思 想 。改 变 像 素 点 简单
着 色 和 入栈 的顺 序 ,从 而 像 素 点 入 栈 的次 数 ,达 到 降低 算法 执 行 时所 占空 间 的 目的 .在 具 体 的程 序 实 现 时 减少
对 像 素 点 坐标 的存 储 采 用 占用 空间较多 的整型 ,没有考虑到像素点 坐标取 值的实际情况 ,消耗空间较多.改进 、
区域 填充 是计算 机 图形学 的基本 问题 之一 ,它是 用一 种颜色 或 图案来填 充一 个 二维 区域 ,该 区域 卜 可 以是带 孔 的 ,也 可 以是 不带 孔 的 ,它 主要 用来 实现 绘制 二维平 面及 三维 物体 的 中一个 面. 种子填 充算法
Ab t a t I r r t m p ov t e e fce c o r a iln u i i s r c : n o de o i r e h fii n y f a e fli g sng smpl e d ilng a go ihm , t e s e fli l rt he ma n m e ho st n v t a i l o ihm h gh , c a i he o de i e h d ng a s i g a e i t d i o i no a e b sc a g rt t ou t h ng ng t r rofp x ls a i nd pu h n r a it tc n o s a k, t e e y r d i he t t lnu b r o u h ng a e nt t c h r b e ucng t a a m e f p s i r a i o s a k. Thu he g a f r du i he s t o lo e cng t s a eu e p c s d whe m p e n i he l o ihm s a hiv d. Ho v r t e m e n i l me tng t a g rt i c e e we e , h mor o pi e i oo d — y t x lpont c r i na e a s mo e oc u n y s c urn he p ro o r t o e r t s t ke r . c pa c pa e d i g t e i d ofc nc e epr c du e。 a d t e a t a iu to fC — n h c u ls t a i n o O or i a e f t oi t v u s S o t ke i o on i r to d n t s o he p n al e i n t a n nt c sde a i n, a hu nd t s, m o e s a e S a n. The i r p c i t ke m— p o e e d fli g a g r t r v d s e iln l o ihm s u e o e r s oo d na e n t o m fpo ii o ntd i g t e c r e i s d t xp e s c r i t s i he f r o ston p i urn h ou s o mplme tn he pr c du e, t n f r he e c h c u e l c . An he e e i n a e u t h s fi e n ig t o e r he u t r r du e t e o c pi d p a e d t xp rme t lr s l a a s r v d t e vai t ft sm e ho . lo p o e h ldiy o hi t d Ke r s: s e ilng; b tme r y wo d e d fli i mo y; a e ilng; s a k r a fli tc
区域填充算法
区域填充算法⼀、区域填充概念区域:指已经表⽰成点阵形式的填充图形,是象素的集合。
区域填充:将区域内的⼀点(常称种⼦点)赋予给定颜⾊,然后将这种颜⾊扩展到整个区域内的过程。
区域填充算法要求区域是连通的,因为只有在连通区域中,才可能将种⼦点的颜⾊扩展到区域内的其它点。
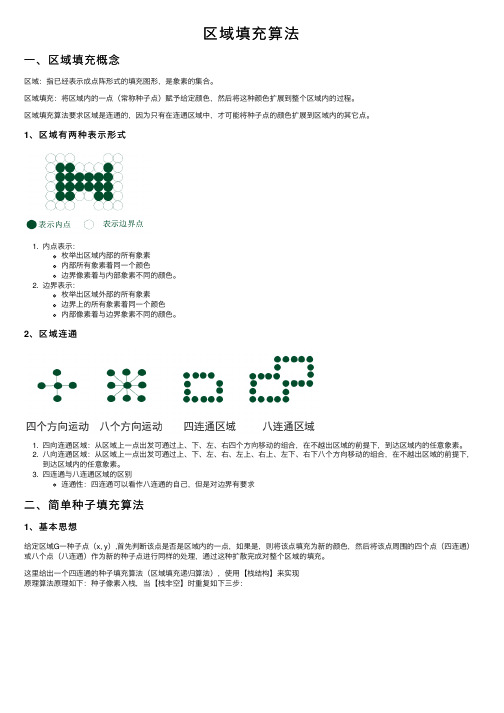
1、区域有两种表⽰形式1. 内点表⽰:枚举出区域内部的所有象素内部所有象素着同⼀个颜⾊边界像素着与内部象素不同的颜⾊。
2. 边界表⽰:枚举出区域外部的所有象素边界上的所有象素着同⼀个颜⾊内部像素着与边界象素不同的颜⾊。
2、区域连通1. 四向连通区域:从区域上⼀点出发可通过上、下、左、右四个⽅向移动的组合,在不越出区域的前提下,到达区域内的任意象素。
2. ⼋向连通区域:从区域上⼀点出发可通过上、下、左、右、左上、右上、左下、右下⼋个⽅向移动的组合,在不越出区域的前提下,到达区域内的任意象素。
3. 四连通与⼋连通区域的区别连通性:四连通可以看作⼋连通的⾃⼰,但是对边界有要求⼆、简单种⼦填充算法1、基本思想给定区域G⼀种⼦点(x, y),⾸先判断该点是否是区域内的⼀点,如果是,则将该点填充为新的颜⾊,然后将该点周围的四个点(四连通)或⼋个点(⼋连通)作为新的种⼦点进⾏同样的处理,通过这种扩散完成对整个区域的填充。
这⾥给出⼀个四连通的种⼦填充算法(区域填充递归算法),使⽤【栈结构】来实现原理算法原理如下:种⼦像素⼊栈,当【栈⾮空】时重复如下三步:2、算法代码这⾥给出⼋连通的种⼦填充算法的代码:void flood_fill_8(int[] pixels, int x, int y, int old_color, int new_color) { if (x < w && x > 0 && y < h && y > 0) {// 如果是旧的颜⾊⽽且还没有给他填充过if (pixels[y * w + x] == old_color) {// 填充为新的颜⾊pixels[y * w + x]== new_color);// 递归flood_fill_8(pixels, x, y + 1, old_color, new_color);flood_fill_8(pixels, x, y - 1, old_color, new_color);flood_fill_8(pixels, x - 1, y, old_color, new_color);flood_fill_8(pixels, x + 1, y, old_color, new_color);flood_fill_8(pixels, x + 1, y + 1, old_color, new_color);flood_fill_8(pixels, x + 1, y - 1, old_color, new_color);flood_fill_8(pixels, x - 1, y + 1, old_color, new_color);flood_fill_8(pixels, x - 1, y - 1, old_color, new_color);}}}3、OpenCV实现import cv2def seed_fill(img):ret, img = cv2.threshold(img, 128, 255, cv2.THRESH_BINARY_INV) label = 100stack_list = []h, w = img.shapefor i in range(1, h-1, 1):for j in range(1, w-1, 1):if (img[i][j] == 255):img[i][j] = labelstack_list.append((i, j))while len(stack_list) != 0:cur_i = stack_list[-1][0]cur_j = stack_list[-1][1]img[cur_i][cur_j] = labelstack_list.remove(stack_list[-1])# 四邻域,可改为⼋邻域if (img[cur_i-1][cur_j] == 255):stack_list.append((cur_i-1, cur_j))if (img[cur_i][cur_j-1] == 255):stack_list.append((cur_i, cur_j-1))if (img[cur_i+1][cur_j] == 255):stack_list.append((cur_i+1, cur_j))if (img[cur_i][cur_j+1] == 255):stack_list.append((cur_i, cur_j+1))cv2.imwrite('./result.jpg', img)cv2.imshow('img', img)cv2.waitKey()if __name__ == '__main__':img = cv2.imread('./test.jpeg', 0)seed_fill(img)4、简单种⼦填充算法的优点和缺点优点:1. 该算法也可以填充有孔区域缺点:1. 有些像素会多次⼊栈,降低算法效率,栈结构占空间2. 递归执⾏,算法简单,但效率不⾼,区域内每⼀像素都要进/出栈,费时费内存3. 改进算法,减少递归次数,提⾼效率三、扫描线种⼦填充算法⽬标:减少递归层次适⽤于边界表⽰的4连通区间1、基本思想在任意不间断区间中只取⼀个种⼦像素(不间断区间指在⼀条扫描线上⼀组相邻元素),填充当前扫描线上的该段区间;然后确定与这⼀区段相邻的上下两条扫描线上位于区域内的区段,并依次把它们保存起来,反复进⾏这个过程,直到所保存的各个区段都填充完毕。
射线填充——种子填充算法的改进
a )栈 顶像 素 出栈 ; b )将 出栈像 素设 置成 填充 色 ; c )检 查 出栈像 素 的 8 一邻 接点 ,若 其 中某 个像 ( 3 ) 检 查 栈 是 否 为 空 ,若 栈 非 空 重 复 步 骤 ( 2 ) , 该填 充 算 法 过程 是 很 简 单 的 ,可 以在 用 户 先
关 键词 : 区域 填 充 ;种 子点 ;八连 通 ;射 线 ;不规 则 区域
中图分 类号:T P 3 9 1 . 4 1
文献 标识码 :A
文 字标 号:粤 内登 字。 一1 0 2 6 7 ( 2 0 1 3 ) 0 1 — 0 0 7 0 — 0 3
常 用 的填 充算 法可分 为 两大类 :扫描 转换 和种 区域边 界颜 色范 围 内的所有像 素 为止 。算法 步骤如
本 原理 为 : 只要 在某 个 区域 内有一 个 已知像 素 , 就
能 从此 像 素 出发找 到 区域 内所 有其 他像 素 , 并 对它 素不 是边界 色且 未置 成填充 色 ,则把该 像 素人栈 。
们进行填充 。根据区域的特性 , 种子填充法可分为
出发 。 可 以通 过 上 、下 、左 、右 四个方 向或者 上 、
l 1 . 子填 充 。前者着 重解 决 由多边形 轮廓 线所 围 的区域 下 【
的填色问题 。后者适用于任意形状轮廓线所围成的
区域 ,但 缺点是 要求 区域 必须 闭合且 一次 只能 填充
一
( 1 ) 种子 像素 人栈 ;
( 2 ) 执行 如下 三步 :
个单 连 通 区域 。 种 子填 充法 是 区域 填充 的一种基 本 方法 , 其 基
内 的任 意像 素 。传统 的种 子填充 法存在 着 占用空 间 色和图案 ,用途比较广泛 。然而该算法需要很大的
《计算机图形学》试题-A卷及参考答案

7、对于由P 0 P 1 P 2 三点所决定的二次B样条曲线,下列叙述中错误的是( D )
A)起始点位于(P 0 +P 1 )/2 处; B)终止点位于(P 2 +P 1 )/2 处; C)若P 0 P 1 P 2 三点共线时,该曲线是一条线段; D)起始点的切矢为:2(P 1 -P 0 )。 8、下列不属于计算机图形学中三维形体表示模型的是:( C )。 A 线条模型 B 表面模型 C 粒子模型 D 实体模型
X(t)=3t 2 3 Y(t)=3t-9t +6t 2 3 Z(t)= 3t-9t +6t 将 t 分别等于 0,1/3, 2/3,1 代入上述参数曲线,得 P(0)=(0,0,0) P(1/3)=(1,2/9,2/9) P(1/2)=(3/2,0,0) P(2/3)=(2,-2/9,-2/9) P(1)=(3,0,0)
计算机图形学试题
一、选择题(20 分) 1、种子填充算法中,正确的叙述是( C ) A)按扫描线的顺序进行象素点的填充; B)四连接算法可以填充八连接区域;
A
C)四连接区域内的每一象素可以通过上下左右四个方向组合到达; D)八连接算法不能填充四连通区域。 2、在多边形的逐边裁剪法中,对于某条多边形的边(方向为从端点 S 到端点 P)与 某条裁剪线(窗口的某一边)的比较结果共有以下四种情况,分别需输出一些顶点. 请问哪种情况下输出的顶点是错误的? ( A ) A) S 和 P 均在可见的一侧,则输出 S 和 P. B) S 和 P 均在不可见的一侧,则输出 0 个顶点. C) S 在可见一侧,P 在不可见一侧,则输出线段 SP 与裁剪线的交点. D) S 在不可见的一侧,P 在可见的一侧,则输出线段 SP 与裁剪线的交点和 P. 3、透视投影中主灭点最多可以有几个?( D ) A)0 B)1 C)2 D)3
第3章 填充
3.5.2 多边形域填充 常用的填充方法是按扫描线顺序,计算扫描线 与多边形的相交区间,再用要求的颜色显示这些区 间的像素,即完成填充工作,简称为扫描线填充算 法。区间的端点可以通过计算扫描线与多边形边界 线的交点获得,该方法适用于自动填充。
1.多边形域的填充步骤 一般多边形的填充过程,对于一条扫描线,可以分为 4个步骤: (1) 求交:计算扫描线与多边形各边的交点。 (2) 排序:把所有交点按x递增顺序进行排序。 (3) 交点配对:第1个与第2个,第3个与第4个等两两配对, 每对交点就代表扫描线与多边形的一个相交区间。 (4) 区间填色:把这些相交区间内的像素置成多边形颜色。
对例3.4重新使用改进后的简单种子填充算法步骤如下。 解: (1) 种子像素(3, 2)入栈并着色。 (2) 出栈(3, 2)。入栈(2, 2)、(3, 3)、(4, 2)、(3, 1)并着色。 (3) 出栈(3, 1)。入栈(2, 1)、(4, 1)并着色。 (4) 出栈(4, 1)。 (5) 出栈(2, 1)。 (6) 出栈(4, 2)。 (7) 出栈(3, 3)。入栈(2, 3)并着色。 (8) 出栈(2, 3)。 (9) 出栈(2, 2)。入栈(1, 2)并着色。 (10) 出栈(1, 2),栈空结束。
3.5 区域填充
3.5.1 种子填充算法
(1) 内定义区域:区域内所有像素着相同颜色,区 域外像素着另一种颜色。区域填充是将区域内所有 像素的颜色置为新颜色。这种填充又称为泛填充, 如图3-46所示。
图3-46 区域的内点表示
(2) 边界定义区域:区域边界像素着特定颜色,区 域内像素不取特定颜色。区域填充是将区域内所有 像素的颜色置为边界像素颜色或新颜色。这种填充 称为边界填充,如图3-47所示。
基于三角面网格细化策略的改进种子填充算法

2 . E d u c a t i o n a l T e c h n o l o g y C e n t e r , P L A G e n e r a l H o s p i t a l , B e i j i n g 1 0 0 8 5 3 , C h i n a ) [ A b s t r a c t ]A i mi n g a t t h e p r o b l e m t h a t t h e g e n e r a l b o u n d a r y — f i l 1 a p p r o a c h c a n n o t w o r k e f f e c t i v e l y f o r s p a c e s u r f a c e s . t h i s p a p e r p r o p o s e s
i n t he a r e a o f bo t h e ic f i e n c y , a n d il f l s e f f e c t of a l go r i t h m p r o p os e d .
[ K e y wo r d s ]b o u n d a y- r f i N ; s e e d 一 1 1 a l g o r i t h m; t r i a n g u l a r s u r f a c e me s h ; t r i a n g l e s u b d i v i s i o n ; c o n v e x h u l l ; v i r t u a l s u r g e r y
a s e e d— f i l l a l g o r i t h m wh i c h i s a v a i l a b l e f or t he t r i a n g ul a r me s he s . By c h a n gi n g t h e wa y t o de t e r mi ne a s e e d i t ma k e s t h e a l go r i t h m a v a i l a bl e f o r t h e 3 D me s h e s . Th i s s u bd i vi s i on a l go r i t h m i s g u i de d b y t h e c o nt o u r , a nd il f t e r s t he s u bd i v i s i o n p oi n t b y s o me f e a t u r e o f t h e c o n v e x hu l 1 . Exp e r i me nt a l r e s ul t s h o ws t ha t t h i s a l g o r i t h m c a n d o b o u nd a y— r f i I 1 o n t r i a n g ul a r me s he s we l 1 . h a s pr a c t i c a l v a l ue .s a t i s ie f s t h e pr a c t i c a l n e e d
大学mooc计算机图形学章节测验期末考试答案
解忧书店 JieYouBookshop
青春须早为,岂能长少年。
第二讲测验
1
单选 (2 分)
种子填充算法中,正确的论述是 A.四连通算法的数据结构采用的是队列结构 B.四连通算法可以填充八连通区域 C.它是按扫描线的顺序进行像素点的填充 D.四连通区域内的每一象素可以通过上下左右四个方向组合到达
正确答案:A、B 你没选择任何选项
3
判断 (1 分)
使用齐次坐标可以将 n 维空间的一个点向量唯一的映射到 n+1 维空间中
©解忧书店,严禁转载,违者必究!
4 / 16
正确答案:×
青春须早为,岂能长少年。
第六讲测验
1
单选 (2 分)
透视投影中主灭点最多可以有几个? A.3 B.1 C.2 D.0
A 正确答案: 你没选择任何选项
正确答案:C、D 你没选择任何选项
2
多选 (2 分)
在区域分割(Warnack)消隐算法中,窗口与多边形的关系包括哪些? A.包围 B.内含 C.相交 D.分离
©解忧书店,严禁转载,违者必究!
3 / 16
正确答案:A、B、C、D 你错选为 D
青春须早为,岂能长少年。
第五讲测验
1
多选 (2 分) 下述对坐标系的描述哪些是正确的?
2
单选 (2 分)
有关平面几何投影的叙述,错误的是 A.斜投影又可分为斜等测、斜二测 B.正轴测又可分为正一测、正二测 C.透视投影又可分为一点透视、二点透视、三点透视 D.三视图又可分为主视图、侧视图、俯视图
B 正确答案: 你没选择任何选项
3
多选 (2 分)
在下列对投影的描述里,正确的论述为 A.太阳光线产生的投影为平行投影 B.物体经过透视投影后可产生缩放的效果 C.三视图属于透视投影 D.透视投影与平行投影相比,视觉效果更有真实感,而且能真实地反映物体的精确的尺 寸和形状
一种改进的扫描线种子填充算法
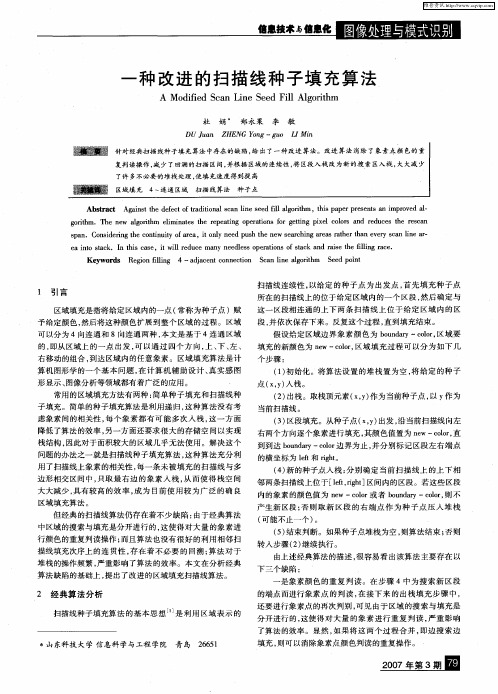
Kewod R go ln 4一 d cn cn et n Sa n l rh y r s einfl g ii aj et onci cnl ea oi m Se o t a o i g t edp i n
1 引言
区域填 充是指将 给定 区域 内的一点 ( 常称 为种子点 )赋 予 给定颜 色 , 然后将这种颜 色扩展到整个 区域 的过 程 。区域
区域填充
4Ab ta t Ag i s t e d fc ft d t n ls a n e d f lag r h ,t i p p rp e e t a mp o e l sr c an t h ee to a i o a c n l es e l lo t m h s a e rs ns n i r v d a— r i i i i g rh oi m.T e n w ag r h ei n ts t e rp ai g o ea in o e t g p x l c lr n e u e h e c n t h e l o t m l i mi a e h e e t p r t s fr g t n i e oo s a d r d c s t e r s a n o i s a .C n i e n e c n i u t f r a t n yn e u h t e n w s ac ig a e sr t e h n e e y S a n 。 pn o sd r g t o t i o e ,i o l e d p s h e e r h n a ah r a v r C l e a i h n y a r t n i r e no sa k n ti a e tw l r d c n e d e s o e ai n fsa k a d r ie t e f l g rc . a i t tc .I h s c s ,i i e u e ma y n e l s p r t s o tc n a s h i i a e l o ln
填充算法实验报告

填充算法实验报告实验报告:填充算法研究与实验1. 实验目的填充算法在计算机图形学中有着广泛的应用,并且对于计算机图形学的发展有着重要意义。
本次实验旨在通过对填充算法的研究与实验,了解填充算法的原理和应用,掌握填充算法的基本实现方法,实现简单的填充效果。
2. 实验背景填充算法是计算机图形学中的一种常用算法,用于将指定区域进行填充。
填充算法可以应用于图像的编辑、区域选择、图像渲染等方面。
常见的填充算法包括区域种子填充算法、扫描线填充算法等。
3. 实验内容本次实验主要研究和实现了区域种子填充算法和扫描线填充算法。
区域种子填充算法是指通过指定一个待填充的种子点,在其周围的区域进行填充。
扫描线填充算法是指通过扫描图像的每一行,在特定条件下对像素进行填充。
在实验中,我们首先实现了区域种子填充算法。
通过在待填充的区域中选择一个点作为种子点,然后从指定点出发,通过递归或栈的方式对相邻的像素进行着色,直到遇到与起始点像素颜色不同的像素为止,从而完成填充效果。
其次,我们实现了扫描线填充算法。
这种算法的核心是扫描图像的每一行,在每一行上找到待填充区域的边界并将其记录下来,然后根据边界的位置对每一个像素进行填充。
我们采用了活性边表和扫描线转换算法来实现扫描线填充算法。
4. 实验结果通过实验我们成功实现了区域种子填充算法和扫描线填充算法,在输入指定的区域和种子点后,程序能够快速地对指定区域进行填充,生成了良好的填充效果。
5. 实验分析区域种子填充算法是一种简单且直观的填充算法,但对于复杂区域的填充效果并不理想。
它的主要缺点是可能导致栈溢出或填充效果不均匀,因此在实际应用中不太常用。
相比之下,扫描线填充算法具有更好的填充效果和效率。
其使用了活性边表和扫描线转换算法,可以在进行每一行的扫描时快速地找到边界并进行填充。
但该算法无法很好地处理较复杂的几何形状,例如存在凹陷和自相交的区域。
6. 实验总结通过本次实验,我们深入学习了填充算法的基本原理和实现方法,并成功实现了区域种子填充算法和扫描线填充算法。
区域填充算法

3、基于曲线积分的区域填充算法
• 算法的实现: ➢对一个区域进行轮廓跟踪,求出区域的边
• 改进算法的基本思想是:每找到一个新的内部
区段时,不仅将新区段的y值(yn)和左右列值xnl, xnr压入堆栈,而且同时把当前区段的y值和左右 列值xl,xr也压入堆栈,以保存和传递有关的信息。
3、基于曲线积分的区域填充算法
基于曲线积分的区域填充算法是邓国强,孙 景鳌等(2001)提出的一种以格林公式求区域面 积为基本原理进行区域填充的特殊算法。
1、递归种子填充算法
递归种子填充算法,又称边界填色算 法。
算法的原理是:让单个像元作为填充 胚,在给定的区域范围内,通过某种方法 进行蔓延,最终填充满整个多边形区域。 为了实现填充胚的蔓延,可采用四邻法或 八邻法进行填充。
2、扫描线种子填充算法
(1)扫描线种子填充算法
扫描线种子填充算法的对象是一个个扫描 线段。扫描线段是指区域内同值相邻像素 在水平方向的组合,它的两端以具有边界 值的像素为边界,即一段扫描线段的中间 只有同一种像素。
(2)计算多边形面积
4、区域填充算法在地图制图中的应用
(2)计算多边形面积
Sa
24
1 5 2
1 13 33 2
Sb
30
1 2
5
1 2
17
41
ScΒιβλιοθήκη 1031 213
1 2
17
DNA序列比对技术的改进与优化方法研究
DNA序列比对技术的改进与优化方法研究摘要:DNA序列比对是生物信息学领域中的重要任务之一,其主要目的是在基因组中寻找相似区域,以揭示序列之间的共同点和差异。
然而,由于DNA序列的长度和复杂性,传统的比对方法面临着时间和精度上的挑战。
因此,研究人员不断努力寻找改进和优化的方法来提高比对的准确性和效率。
本文将介绍几种常见的DNA序列比对技术的改进与优化方法。
一、Seed-and-Extend算法Seed-and-Extend算法是一种广泛应用于DNA序列比对的算法。
该算法的思想是先寻找相似的短片段(seed),然后根据这些种子来扩展比对区域,并最终确定最佳的比对结果。
为了提高算法的效率,研究人员提出了一些改进方法。
1. 基于索引的加速:传统的Seed-and-Extend算法需要遍历整个参考序列来找到种子。
为了加速该过程,研究人员提出了索引技术,如哈希索引和后缀数组索引。
这些索引结构能够快速定位种子的位置,从而减少比对的时间复杂度。
2. 基于滑动窗口的搜索:种子的选择对于比对结果的准确性至关重要。
传统的Seed-and-Extend算法通常采用固定长度的种子,但这种方法容易错过一些重要的种子。
为了提高种子的选择准确性,研究人员提出了基于滑动窗口的搜索方法,可以根据序列的局部信息来选择种子。
3. 树状结构的扩展:种子的扩展是决定比对效果的关键步骤。
为了提高扩展的效率和准确性,研究人员引入了树状结构,如后缀树和后缀索引。
这些结构能够快速搜索相似的序列片段,从而提高比对的效率和准确性。
二、快速比对算法随着高通量测序技术的发展,大规模DNA序列的比对需求日益增加。
为了应对这一挑战,研究人员提出了一系列的快速比对算法,以提高比对的效率和准确性。
1. 基于哈希表的快速比对:哈希表是一种常用的数据结构,可以快速定位元素的位置。
研究人员使用哈希表来存储参考序列中的种子,并利用哈希函数来快速搜索相似的种子。
这种方法能够大大加速比对的过程。
一种改进的种子填充算法
一种改进 的种子填充算法
・5 ・ 7
④ 、⑤ 中的任何一个 ,当然要保证其在填充区域之内。
o o o o o
l o o o ② o
o ③ ① ⑤ o
o o ④ o o
o o o o o
图2
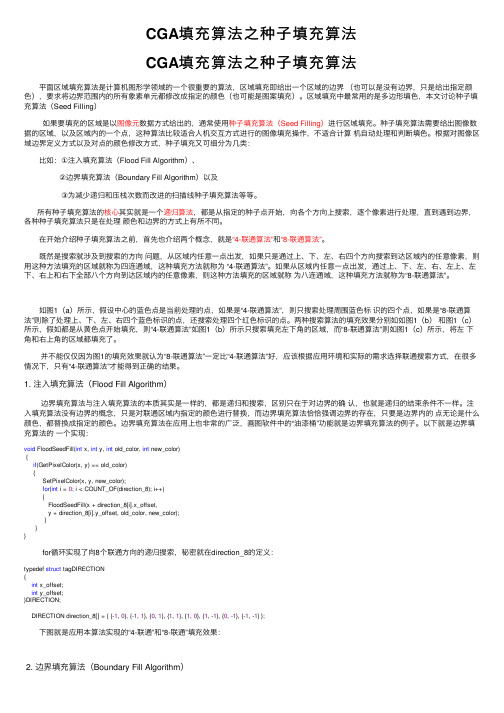
()传统 的四向连通 区域填 充取上 、下、左、右四个方 向,而本文 四向连通 区域填充取左上 、左 下、右 上、右 3 下 四个方 向,如图 3 示,种子①填充。标识区域,种子②填充 ●标识区域 。 所
栈之 前要判 断像素点是否 已被填充 ,若 已被填充才入栈 ,否则 不予考虑 。这样将会减少入栈 的冗余像素 ,即每 一个
像素点只入栈~次。 ()传统种子填充算法采用的是用一个种子进行填充 ,而本文 算法 采用两个种子进行填充 。其 中一个种子 是给 2
定 的,另外一个是根据给定 的种子产生 的。如 图 2 ,假定像素① 是给定的种子 ,则 另外一个种子可 以取像 素② 、③ 、
个重要原 因,本文针对上述两点对算法进行改进。
o o o o o o o
()在递归种子填充算 法中 ,采用 的 充算法 入栈
当填充某 点时,不管它的 四连通点是否 已被填充 ,都要进入堆栈 ,这会 导致很 多的冗余像素点入栈。而本 文算法采用 的是先填充再入栈 ,在入
o ● o ● o ●
● o ● o ● o
o ● ① ② o ●
● o ● o ● o o ● o ● o ●
图3 三 、算法描 述
改进算法 的算法语言描述 ( 采用类 c语言描述 ) 如下: s e (l y ) e dx , 1是最初给定的种子像素点, on p it表示一个像素点, x , 1 由 1y 坐标 组成 s e (2 y ) 由种子 s e (ly ) e dx , 2 是 ed x , 1 产生的种子 ,由 x , 2 2 y 坐标组成 : I i Sa k) n tt c (初始化栈 , 并使它为空 : P s (是将一个像素 点入栈 ; uh) Pp o 0是 出栈, 回类型 为像素点 : 返
三维种子填充算法的改进

a s a ln r u he n o as a k i t a fs e o e .Thei c n—i e a e p s d i t t c nse d o e d v x 1 mpr v d ag rt o e lo ihm v i e a i g s a c i g a od r pe tn e r h n s e si h ild s a e tn n e d n h p n fl d l b lS s t lmi t he r du d n o e e d n t e fl p n by s ti g a d r a i g t e s a il a e O a o ei na e t e n a t v x l e e
Xu n a g ) Xu e fn Ja g Z iu ” eBid n eW n a g ) n hg o i
( ma e rcs n e tr Be a g Unv ri I g oes g C n e , i n ies y,B i n 1 0 8 ) P i h t e ig j 00 3 ( e a c e tr fI tg a i n o ma inS s m ,I s t t f Auo t n, h n s c d myo S i cs e ig 1 0 8 ) R s rh C ne ne r t n I f r t y t e o o o e nt ueo i tma i C ie o eA a e f c n e ,B O n 0 0 0 e
Ke r s 3 e dp it raf l g c n l eag r h ;6 ajc n o n cin y wo d D se on ;ae ii ;s a —i loi m ln n t 一da e tc n e t o
一种基于Bresenham算法的圆内区域填充新算法

算 法 , 内 区 域 填 充 算 法 大 量 应 用 于 计 算 圆 机辅 助设 计 与 制 造 、 算 机 软 件 用 户 接 l 计 q、 计 算 机 动 画和 艺 术 等 领 域 。 此 , 圆 内 区 因 对
域 填 充 算 法 进 行 研 究 , 着 非 常 重 要 的 意 有
n wc l r; e oo )
学 术 论 坛
一
SI C O NE&TCNLG E EHO0Y
种 基于 Br e a s h n m算法 的圆 内 区域填 充新 算法 e
莫礼 平 唐安 ( 吉首 大学数 学与计 算机 科学学 院 湖 南吉首
41 0 ) 6 ຫໍສະໝຸດ 0 摘 要 : 了克服 计算 机 图形学中的基 于种子 点的 t 为 E内区域 填充 的递 归算 法的不足 , 出了一 种基 于改进 的B ee h m 提 rsn a 圜生 成算法 的非递 归 的 圃 内区域填 充 新算 法 。 实例证 明 , 相对递 归填 充算 法 , 算法 具 有 简单 , 新 快速 . 精确 且 占用 内存 空间 小的优 点 。 关键词 : 计算机 图形学 圃 区域填 充 Brsn a ee h m算法 中 图分 类 号 : 4 G6 2 文 献标 识 码 : A 文 章编 号 : 7 -3 9 ( o 9 1 () 2 9 3 1 2 7 1 2 0 ) 1 c一0 2 —0 6 计 算 机 图 形 学 是 研 究 如 何 用 计 算 机 生 假 设 ( y) 圆 内 区 域 内 的 一 点 , 置 和 管 理 系 统 堆 栈 。 调 用 一 次 递 归 函数 x, 为 每 成 、 理 和 显示 图形 的一 门学 科” 。 着 计 o d o o 为 圆 内 区域 填 充 前 的颜 色 , 将 整 就 “ 栈 ”一次 , 数 执 行 完 一 次 , 果 就 处 】 随 l c lr 需 入 函 结 算 机 图形 学 的 不断 发 展 , 应 用 范 围 日趋 个 圆 内 区 域 填 充 为 新 颜 色n wc l r 内 点 “ 其 e oo 。 出栈 ” 次 。 内 区域 填 充 的 递 归算 法 函 一 圆 广 泛 。 计 算 机 显 示 器 屏 幕 上 生 成 的任 何 表 示 的 四连 通 区域 的递 归填 充算 法 的 实现 数 的 递 归 调 用 次 数 由需 要 填 充 的 像素 点数 在 图 形 都 是 像 素 点 的 集 合 。 内 区 域 填 充 的 函数 如 下 : 圆 目决 定 。 需 要 填 充 的 区 域 越 广 , 覆 盖 像 所 所
一种无重复入栈的种子填充法
相 邻 象 素 的 填 充 状 态 , 而 大 大 缩 小 所 用 的栈 空 间 . 从 . 关 键 词 :种 子 填 充 ; ; 态 变 量 栈 状
中 图分 类 号 : P 9 1 3 1 4 F 文献标识码 : A 文 章 编 号 :0 4—5 0 (0 2 0 —0 2 —0 10 2 12 0 )2 0 9 3
2 种 子 填 充 法 改进
从 前述 种 子算 法 看 出 , 种算 法 实质 上 是从 种 子象 素 开 始 , 断 搜 索 周 围 象 素 , 周 围 象 这 不 若 素 在 区域 内 , 未 被填 充 即将 其 入栈 , 且 然后 将 栈 顶 元 素 出栈 填 充 。 由于 象 素 是 在 出栈 时 填 充 ,
计 算机 在 进行 图形处 理 时 , 仅 要 画 出 图形 的边 界 ( 廓 ) 常 常还 需要 在 给定 边 界 中填 充 不 轮 , 某 种颜 色 因此 , 对给 定 区域 内的点 的快 速 填 充是 图形处 理 的 一个 重要 课 题 。
种 子填 充 法是 区域填 充 的 一种 基本 方法 。其 基 本 原 理 为 : 只要 在 某 个 区域 ( 界 ) 边 内有 一 个 已知 象 素 , 就能 从 此象 素 出发 找到 区域 内 的所有 象 素 。
收 稿 日期 :0 2—0 20 4—1 1
作 者 简 介 : 多 观 ( 9 5 )男 , 士 。 陈 16 一 , 硕
维普资讯
铁 道 师院 学报
20 0 2丘
利用 栈结 构 实现 种 子填 充 的简单 算 法 如下 : 1 )清 空栈 。 2 )种 子象 素 入栈 。
维普资讯
20 0 2年 5月
第l 9卷 第 2期
扫描线种子填充算法的改进
扫描线种子填充算法的改进
郭文平;龙帮强
【期刊名称】《天津工业大学学报》
【年(卷),期】2008(027)002
【摘要】针对传统扫描线种子填充算法中存在的缺陷,提出了一种改进算法.该算法根据填充区域边界的连续性和相邻扫描线的相关性,只需将每个连续填充区域的起始信息入栈,而不需要将相邻的每条扫描线都入栈,避免了不必要的出入栈操作;在填充过程中,根据相邻扫描线上填充区间的关系判断是否需要回溯和产生新的填充区间,有效避免了不必要的回溯和像素的重复判读.提高了填充效率.
【总页数】4页(P48-51)
【作者】郭文平;龙帮强
【作者单位】天津工业大学信息与通信工程学院,天津,300160;天津工业大学信息与通信工程学院,天津,300160
【正文语种】中文
【中图分类】TP391.41
【相关文献】
1.一种改进的扫描线种子填充算法 [J], 徐莹
2.扫描线种子填充算法的改进 [J], 余腊生;沈德耀
3.扫描线种子填充算法的改进 [J], 孙燮华
4.一种改进的扫描线种子填充算法 [J], 杜娟;郑永果;李敏
5.扫描线种子填充算法的问题及改进 [J], 李桂清;李陶深
因版权原因,仅展示原文概要,查看原文内容请购买。
CGA填充算法之种子填充算法
CGA填充算法之种⼦填充算法CGA填充算法之种⼦填充算法 平⾯区域填充算法是计算机图形学领域的⼀个很重要的算法,区域填充即给出⼀个区域的边界(也可以是没有边界,只是给出指定颜⾊),要求将边界范围内的所有象素单元都修改成指定的颜⾊(也可能是图案填充)。
区域填充中最常⽤的是多边形填⾊,本⽂讨论种⼦填充算法(Seed Filling) 如果要填充的区域是以图像元数据⽅式给出的,通常使⽤种⼦填充算法(Seed Filling)进⾏区域填充。
种⼦填充算法需要给出图像数据的区域,以及区域内的⼀个点,这种算法⽐较适合⼈机交互⽅式进⾏的图像填充操作,不适合计算机⾃动处理和判断填⾊。
根据对图像区域边界定义⽅式以及对点的颜⾊修改⽅式,种⼦填充⼜可细分为⼏类: ⽐如:①注⼊填充算法(Flood Fill Algorithm)、 ②边界填充算法(Boundary Fill Algorithm)以及 ③为减少递归和压栈次数⽽改进的扫描线种⼦填充算法等等。
所有种⼦填充算法的核⼼其实就是⼀个递归算法,都是从指定的种⼦点开始,向各个⽅向上搜索,逐个像素进⾏处理,直到遇到边界,各种种⼦填充算法只是在处理颜⾊和边界的⽅式上有所不同。
在开始介绍种⼦填充算法之前,⾸先也介绍两个概念,就是“4-联通算法”和“8-联通算法”。
既然是搜索就涉及到搜索的⽅向问题,从区域内任意⼀点出发,如果只是通过上、下、左、右四个⽅向搜索到达区域内的任意像素,则⽤这种⽅法填充的区域就称为四连通域,这种填充⽅法就称为 “4-联通算法”。
如果从区域内任意⼀点出发,通过上、下、左、右、左上、左下、右上和右下全部⼋个⽅向到达区域内的任意像素,则这种⽅法填充的区域就称为⼋连通域,这种填充⽅法就称为“8-联通算法”。
如图1(a)所⽰,假设中⼼的蓝⾊点是当前处理的点,如果是“4-联通算法”,则只搜索处理周围蓝⾊标识的四个点,如果是“8-联通算法”则除了处理上、下、左、右四个蓝⾊标识的点,还搜索处理四个红⾊标识的点。
种子填充
一、实验目标1)通过实验,进一步了解和掌握几种常用多边形种子填充算法的基本原理2)熟练掌握种子填充算法和区域图案填充的基本过程3)掌握在C/C++环境下用多边形种子填充算法编程实现指定多边形的填充二、实验内容一、实验内容1. 在给定的程序模板中添加递归种子填充、简单种子填充、扫描线种子填充,区域图案填充的功能,生成新的程序窗口中要有递归种子填充、简单种子填充、扫描线种子填充,区域图案填充的菜单按钮,点击按钮分别出现递归种子填充、简单种子填充、扫描线种子填充,区域图案填充的窗口,点击鼠标左键实现在窗口任意位置填充;2. 在理解递归种子填充、简单种子填充、扫描线种子填充,区域图案填充的原理,使用VC实现递归种子填充、简单种子填充、扫描线种子填充,区域图案填充程序的编写,并最终在MFC上演示出来。
二、实验原理种子填充算法又称为边界填充算法。
其基本思想是:从多边形区域的一个内点开始,由内向外用给定的颜色画点直到边界为止。
如果边界是以一种颜色指定的,则种子填充算法可逐个像素地处理直到遇到边界颜色为止。
种子填充算法常用四连通域和八连通域技术进行填充操作。
1.递归种子填充算法原理种子填充算法是区域填充的一种重要基本方法,它假设在多边形内有一像素已知,由此出发利用连通性找到区域内的所有像素。
递归种子填充算法的基本思想:设(x,y)是内点表示的一区域G内的一点,先取(x,y)点为种子点,测试其颜色,若不等于边界颜色,说明是区域内一点,则将其置为新的颜色newcolor,否则说明该点不在区域G内,则停止填充;然后将该点周围的四个点(四连通)或八个点(八连通)作为新的种子点进行同样的处理,通过这种扩散完成对整个区域的填充。
2.简单种子填充算法原理简单种子填充算法,其基本思想:从多边形区域的一个内点开始,由内向外用给定的颜色画点知道边界颜色为止。
如果边界是以一种颜色指定的,则简单种子填充算法可逐个像素地处理知道遇到边界色为止。
八邻接点种子填充算法编程

image[x][y] = value
for i in range(8):
fill(x + dx[i], y + dy[i])
#调用递归函数来填充种子周围的像素
fill(seed[0], seed[1])
这个算法使用了一个递归函数来填充种子周围的像素。在函数中,我们首先检查当前像素是否在图像的边界内,并且是否与种子像素相连。如果是,我们将其值设置为目标值,并递归地填充与当前像素相连的像素。通过调用fill(seed[0], seed[1]),我们可以从种子像素开始填充整个连通区域。
dy = [-1, 0, 1, -1, 0, 1, -1, 0]
#定义四个边界条件
left = 0
right = width - 1
top = 0
bottom = height - 1
#定义递归函数来填充种子周围的像素
def fill(x, y):
if x < left or x > right or y < top or y > bottom or image[x][y] != seed:
八邻接点种子填充算法是一种用于图像处理的算法,用于填充二值图像中的连通区域。以下是一个简单的Python实现:
def seedfill(image, height = image.shape
#定义八个方向的偏移量
dx = [-1, -1, -1, 0, 0, 0, 1, 1]
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
3 算法描述
改进算法的算法语言描述 (采用类 C 语言描述 )如下 :
seed(x1,y1)是最初给定的种子像素点,point 表示一个像素点 , 由 x1,y1 坐标组成 ; seed(x2,y2)是由种子 seed(x1,y1)产生的种子 , 由 x2,y2 坐标组成 ; InitStack()初始化栈 , 并使它为空 ; Push()是将一个像素点入栈 ; Pop()是出栈 , 返回类型为像素点 ; StackEmpty()是栈的判空函数 ; getpixel()返回指定像素点的颜色值; putpixel()设定指定像素点的颜色值为给定的颜色值; // 程序从下面开始 InitStack(); putpixel(seed(x1,y1)) ; putpixel(seed(x2,y2)) ; Push (seed(x1,y1)) ; Push (seed(x2,y2)) ; while(! StackEmpty()) { point=Pop(); if(point 的左上一点不为填充色也不为边界色) { putpixel(point 的左上一点 );Push(point 的左上一点 );} if(point 的左下一点不为填充色也不为边界色) { putpixel(point 的左下一点 ); Push (point 的左下一点 );} !"# !" if(point 的右上一点不为填充色也不为边界色) 50 { putpixel(point 的右上一点 ); Push (point 的右上一点 );} 100 150 if(point 的右下一点不为填充色也不为边界色) 200 { putpixel(point 的右下一点 ); Push (point 的右下一点 );} } 4 算法比较
One Impr oved Seed- filling Algor ithm
HU Yun, LI Pan- rong
(Wuxi Radio & TV University,Wuxi 214021,China) Abstr act: After the analysis and discussion of the tranditional seed- filling algorilms,tha authors put forword an improved seed - filling algorilm , which is superior to the old ones in increasing the efficiency of time or space. Key wor ds: seed filling algorithm; region filling;stack
表1
!"#$% !"#$ !"#$ 7651 1588 31015 6327 70088 14329 124843 25469 !"#$% !"#$ !"#$ 30978 15690 124866 62834 281522 141362 500914 251258
收稿日期 : 2005- 07- 12 作者简介 : 胡云( 1978- ) , 男 , 江苏盐城人 , 无锡市广播电视大学教师 , 主要研究算法设计与数据库技术。
・ 56 ・
安庆师范学院学报 ( 自然科学版 )
2006 年
子是给定的 , 另外一个是根据给定的种子产生的。 如图 2 , 假定像素 ① 是给定的种子 , 则另外一个种子可 以取像素 ② 、 ③、 ④、 ⑤ 中的任何一个 , 当然要保证其在填充区域之内。 ( 3 ) 传统的四向连通区域填充取上、 下、 左、 右四个方向 , 而本文四向连通区域填充取左上、 左下、 右 上、 右下四个方向 , 如图 3 所示 , 种子 ① 填充 ○ 标识区域 , 种子 ② 填充 ● 标识区域。
! 1 !"#$%&’()*
2 算法的实现思想
传统种子填充算法不足之处主要有两点 : ( 1 ) 像素存在重复入栈 , ( 2 ) 栈所占空间很大。 其中像素的重复 入栈也是栈空间所占空间很大的一个重要原因。本文针对上述两点对算法进行改进。 ( 1 ) 在递归种子填充算法中 , 采用的是先入栈 , 出栈后再填充 , 即当 填充某点 时 , 不管它的 四连通点 是否已被填充 , 都要进入堆栈 , 这会导致很多的冗余像素点入栈。而本文算法采用的是先填充再入栈 , 在入栈之前要判断像素点是否已被填充 , 若已被填充才入栈 , 否则不予考虑。 这样将会减少入栈的冗余 像素 , 即每一个像素点只入栈一次。 ( 2 ) 传统种子填充算法采用的是用一个种子进行填充 , 而本文算法采用两个种子进行填充。 其中一个种
214021 )
( 无锡市广播电视大学 , 江苏 无锡
摘
要 : 在对种子填充算法进行分析和讨论的基础上 , 提出了一种改进的种子填 充算法 , 该改进的 种 子
填充算法无论是时间还是空间效率都优于传统算法。 关键词 : 种子填充算法 ; 区域填充 ; 栈 中图分类号 : TP391 文献标识码 : A 文章编号 : 1007- 4260 ( 2006 ) 01- 0055- 02
2006 年 2 月
第 12 卷第 1 期
安庆师范学院学报 (
自然科学版 )
Feb.2006 Vol.12 No.1
பைடு நூலகம்
J ourna l of Anqing Te a che rs Colle ge ( Na tura l S cie nce Edition )
一种改进的种子填充算法
胡 云1 , 李盘荣 2
! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! !
[参考文献 ]
[1]
陈元琰 , 陈洪波 . 一种基于链队列的种子填充法 [J]. 广西师范大学学报 : 自然科学版 , 2003 , 21 ( 3 ) : 30- 33. 计算机图形学的算法基础 (第 2 版 )[M]﹒ 北京 : 机械工业出版社 , 2002 : ﹒ [2] (美 )David F.Rogers. ﹒ 99- 105.
1 问题的提出
区域填充是 计算机图形 学的基本问 题之一 , 种子 填充算法是 区域填充 的一种重要 算法 , 它 广 泛 应 用于交互式绘图系统和数字图像处理中。递归种子填充算法是从填充区域内部的一点开始 , 并由此出 发找到区域内的所有像素。算法从给定种子 (x,y)开始 , 先检测该点的颜色 , 如果它与边界色和填充色都 不相同 , 就用填充色来填充该点 , 然后检测相邻位置 , 以确定它们是否是边界色 和填充色 , 若 不是 , 就采 用递归算法填充该相邻点。这个过程运行到检测完区域边界范围内的所有像素为止。有两种方法检测 , 本文采用四向连通区域填充。 相邻像素 : 四向连通区域填充和八向连通区域填充 递归种子填 充算法的优 点是算法简 单 , 易 于 实 现 , 也 可 以 填 充 带 有内孔的平 面区域。但是 这种算法需 要很大的存 储 空 间 以 实 现 栈 结 构 , 这是因为当 某一像素出 栈时 , 其周围 的所有 4 个像 素 不 管 是 否 已 被填充 , 都必须入栈。这样会导致一个像素要入栈多次。如图 1 所示 , 像素 ⑤ 周围有 8 个像素 , 当像素 ② 出栈时 , 按照四连通填充算法 , 要将 同理 , 当像素 ④ , ⑥ , ⑧ 出栈时也分别要把 ⑤ 压入堆栈 , 不 ⑤ 压入堆栈。 管它是否已在堆栈中 , 不管它是否已被填充 , 也不管它是否是边界 , 这 也就意味着入栈总数是所有像素个数总和的 4 倍。 由于栈中有如此多 的“ 冗余” 信息 , 所以采用这种算法进行填充时 , 所需要的栈空间很大 , 而且对同一个像素如此反复入栈和出栈 , 所花费的时间也很多。
为了验证以上改进算法在栈所用空间大小和进出栈次数方面的改进 , 我们在微机上进行了实验 , 该 实验是在 Pentium4 1.4GHz/256MB/Windows2000/VC++6.0 的环境下完成的。具体实验数据见表 1 , 由此 可以看出 : ( 1 ) 在栈所用空间大小上 , 改进算法的栈空间大小大概是传统种子填充算法的栈空间大小的 这说明改进算 20% 左右 ; ( 2 ) 从进出栈的次数来看 , 传统种子填充算法的进出栈次数是改进算法的 2 倍。 法无论在时间还是在空间上都优于原算法。 在改进的算法中 , 能够节约空间 , 尽量减少了像素点的检测 次数和入栈的总次数 , 同时可以加快填充速度 , 当填充区域很大时这种差别更明显。