测功机动态负载模拟算法_叶晓
一种基于透明计算的动态负载平衡算法
( e a oaoyo ev s e mp t g D p r n f o ue ce c n eh oo yT ig u iesy B in 0 0 4 K yL b rtr f rai P v Co ui , e at t mp t S ineadT c n lg , s h aUnvri , e ig10 8 ) n me o C r n t j [ sr c|F rt np rn ec mp t g ii i dma dt saemutrsucsi tesre lses sc sC U, mo ,/ e . ote Abtat o asae c o ui ,t s n e n O h l— o re h ev rcut , u ha P me r I r n r ie n r y O, t T c h
并联混合动力台架测试系统设计与应用

并联机器人的理论及应用研究
K;E;L<8@ 3? 9@; 9@;3<F L?M 9@; LNN4B8L9B3? 3= NL<L44;4 O;8@L?BEO <3:39
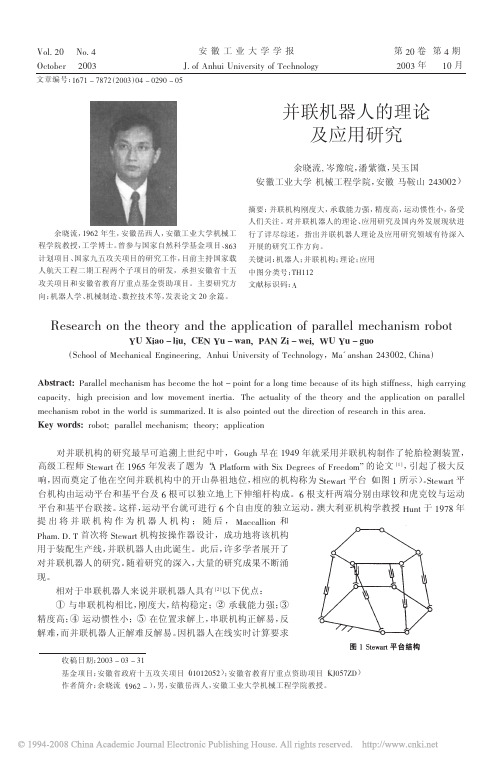
!" #$%& ’ ($)* +,- !) ’ .%/* 01- 2$ ’ .3$* 4" !) ’ 5)& / P8@334 3= Q;8@L?B8L4 R?HB?;;<B?HI >?@AB C?BD;<EB9F 3= G;8@?343HF,QLS L?E@L? !1#""!I T@B?L 0 16789%:8; UL<L44;4 O;8@L?BEO @LE :;83O; 9@; @39 $ N3B?9 =3< L 43?H 9BO; :;8LAE; 3= B9E @BH@ E9B==?;EEI @BH@ 8L<<FB?H 8LNL8B9FI @BH@ N<;8BEB3? L?M 43V O3D;O;?9 B?;<9BL5 G@; L89AL4B9F 3= 9@; 9@;3<F L?M 9@; LNN4B8L9B3? 3? NL<L44;4 O;8@L?BEO <3:39 B? 9@; V3<4M BE EAOOL<BW;M5 X9 BE L4E3 N3B?9;M 3A9 9@; MB<;89B3? 3= <;E;L<8@ B? 9@BE L<;L5 <3= .&9>7; <3:39Y NL<L44;4 O;8@L?BEOY 9@;3<FY LNN4B8L9B3? 对并联机构的研究最早可追溯上世纪中叶, Z3AH@ 早在 %,1, 年就采用并联机构制作了轮胎检测装置, 高级工程师 P9;VL<9 在 %,-& 年发表了题为 “ 引起了极大反 > U4L9=3<O VB9@ PB[ +;H<;;E 3= \<;;M3O] 的论文 ^ % _ , 如图 % 所示) 。 响, 因而奠定了他在空间并联机构中的开山鼻祖地位, 相应的机构称为 P9;VL<9 平台( P9;VL<9 平 台机构由运动平台和基平台及 - 根可以独立地上下伸缩杆构成。- 根支杆两端分别由球铰和虎克铰与运动 平台和基平台联接。 这样, 运动平台就可进行 - 个自由度的独立运动。 澳大利亚机构学教授 JA?9 于 %,). 年 提 出 将 并 联 机 构 作 为 机 器 人 机 构 ; 随 后 , QL88L44B3? 和 U@LO5 +5 G 首次将 P9;VL<9 机构按操作器设计,成功地将该机构 用于装配生产线, 并联机器人由此诞生。此后, 许多学者展开了 对并联机器人的研究。 随着研究的深入, 大量的研究成果不断涌 现。 相对于串联机器人来说并联机器人具有 ^ ! _ 以下优点: 刚度大, 结构稳定;" 承载能力强; ! 与串联机构相比, # 精度高; 串联机构正解易, 反 $ 运动惯性小;% 在位置求解上, 解难, 而并联机器人正解难反解易。 因机器人在线实时计算要求
【国家自然科学基金】_负载状态_基金支持热词逐年推荐_【万方软件创新助手】_20140731

电力电子 用户需求 用户迁移 生物力学 状态空间平均法 牵张负荷 热点 混合力/位移控制 活性炭 洪泛 泵阀联合 油膜轴承 油膜压力 水资源 水土平衡 氧化铝 气动技术 气动伺服阀 歧化 正交频分多址 次优算法 模糊最小相对容量损失 模糊数学 模糊控制 模糊小脑模型 概率 柔性负载 机械臂 机器人 服务质量约束 服务质量(qos) 服务质量 有限元法 有源箝位正激变换器 有功功率 最佳帧长 最低传输速率 最优控制 暂态分析 智能客户端 时间分割法调制 无锥套 无线mesh网络 无功功率 无刷直流直线电机 整流性负载模型:非线性理论 数据加密标准(des) 数据功耗相关性 数字控制 效用函数 效率 故障诊断 摩擦 接枝共聚微球
科研热词 负载平衡 负载均衡 解耦控制 自适应 精确线性化 状态反馈 滑模控制 无线传感器网络 故障诊断 齿轮箱 鲁棒控制 高血压 风险 风力发电 颗粒物质 预测 顶层油温 非线性控制 非线性 静电纺丝 静摩擦 隐终端 随机多址 降载 阻尼 队列系统 门静脉 钢筋混凝土梁 钡铁氧体 速度控制 速度估计 连接 运动学分析 迁移 轮-腿复合式 转速抖动抑制 转速伺服 转子磁场方向 转子断条 路由表 超声电源 资源发现 资源分类 贫油熄火 负载突变 负载状态 负载感知 负温度系数热敏电阻 谐波抑制 谐振开关电容变换器 调度 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52
107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 131 132 133 134 135 136 137 138 139 140 141 142 143 144 145 146 147 148 149 150 151 152 153 154 155 156 157 158 159 160
【计算机仿真】_最优控制_期刊发文热词逐年推荐_20140723

2010年 序号 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45
科研热词 最优控制 无线传感器网络 鲁棒控制器 飞/发一体化设计 预测控制 非线性控制 非均匀分簇 遗传算法 速度协同 进化算法 输出反馈 轨道转移 路径跟踪 谱分解 计算粒子 蚁群算法 蒙特卡洛 落点偏差 节能覆盖 自组织系统 自主水下航行器 能耗 聚类算法 编队控制 线性二次型高斯最优控制 纵向运动控制 红外制导导弹 粒子群优化的可能性均值 神经网络 相平面 电液加载 电流过冲 电梯运行 电惯量 状态空间 特征值配置 滚动时域控制 混沌 涡扇发动机 水翼艇 模糊神经网络 模糊均值 有限拍 最优比例导引律 智能交通系统
椭圆参考轨道 极小值原理 末端约束角 有源噪声控制 最小均方算法 最优设计 最优模糊推理 无刷直流电机 无人机 方向稳定性 数据采样控制系统 提升技术 控制规律 控制 振动控制 批处理遗传算法 径向基网络 延时抉择 实时稳定控制 多目标优化 多参数二次规划 多传感器 处理时间 在线规划 反作用飞轮 双系统 区段混合能 动量项 剩余时间 制动性能 分段仿射控制率 再入弹头 共轭梯度法 公交优先 免疫 倒立摆 信息增量 传感器管理 优化 交会 二级倒立摆 下滑段 三冲量
时间 无人作战飞机 旅行商问题 方法误差 数学模型 数字荷尔蒙模型 改进算法 推力器选择逻辑 控制规律 控制能量约束 拓扑控制 抑制因子 惯量模拟系数 工程实现 局部能量消耗最优 小推力 多目标优化 吸引因子 同步电机 可调尾喷管 可能性均值 反馈控制 反作用控制系统 协方差分析描述函数法 勒让德伪光谱 加速控制 加权阵 制导控制系统 制动器试验台 冲压发动机 内模控制 信息素 优化设计法 优化设计 二级倒立摆 二次型最优 专家自适应控制 不稳定过程
DY-6001 测功机控制器 使用说明书
DY-6001测功机控制器使用说明书蚌埠大洋传感系统工程有限公司目录一、主要功能及特点 (1)二、技术指标 (1)三、外壳尺寸与开孔尺寸 (1)四、外观介绍 (2)1.前面板 (2)2.前面板 (2)3.主显示界面 (3)4.参数设置界面 (3)5.PID整定界面 (3)五、仪表操作说明 (3)1.修改参数 (3)2.扭矩单位切换 (3)3.手动测试模式 (3)4.自动测试模式 (4)5.上位机测试模式 (4)6.复位模式 (4)7.PID参数整定 (4)六、参数说明 (4)1.扭矩通道 (4)2.扭矩量程 (4)3.扭矩系数 (4)4.扭矩小数点 (4)5.转速模式 (4)6.控制模式 (5)7.扭矩设定值0 (5)8.扭矩设定值1 (5)9.扭矩设定值2 (5)10.扭矩1测试时间 (5)11.扭矩2测试时间 (5)12.测试时间单位 (5)13.PID开始转速 (5)14.PID结束转速 (5)15.扭矩报警值 (5)16.转速报警值 (5)17.电流分度值 (5)18.转速小数点 (6)七、自动控制模式图 (6)八、参数表 (6)九、串口通信说明 (7)十、测功机接口说明 (7)十一、励磁输出接口说明 (8)十二、电机控制接口说明 (8)十三、电流输出说明 (8)十四、测功机扭矩校准说明 (9)十五、设备连接说明 (9)十六、装箱清单 (9)概述DY-6001测功机控制器是一种可以对多种扭矩传感器信号和测功机信号进行采样和处理,同时可控制磁粉磁滞制动器。
并将其信号传输至上位机。
其工作原理是将测功机传入的扭矩信号经过高精度ADC转换后,进行运算处理得到真实扭矩值。
再将转速传感器回传的信号经过处理得出实际转速值。
将两组数据进行运算后得出输出功率的大小,并将这三组数据送至显示器显示。
同时将当前数据传输至上位机进行曲线与表格绘制。
一、主要功能及特点●将当前测量的扭矩值与转速值实时显示。
●可以直接计算出当前功率值并显示。
一种发动机试验用动态模拟测功机[实用新型专利]
![一种发动机试验用动态模拟测功机[实用新型专利]](https://img.taocdn.com/s3/m/1df14ee8de80d4d8d05a4f89.png)
专利名称:一种发动机试验用动态模拟测功机专利类型:实用新型专利
发明人:杨建伟,徐开亮,王献民,段保民
申请号:CN201620878094.7
申请日:20160812
公开号:CN205898343U
公开日:
20170118
专利内容由知识产权出版社提供
摘要:本实用新型公开了一种发动机试验用动态模拟测功机,包括底座以及固定连接在底座上的第一惯性飞轮轴承支撑、第二惯性飞轮轴承支撑、第一电机轴承支撑和第二电机轴承支撑,第一惯性飞轮轴承支撑和第二惯性飞轮轴承支撑上安装有飞轮轴,位于第一惯性飞轮轴承支撑和第二惯性飞轮轴承支撑之间的一段飞轮轴上连接有惯性飞轮,第一电机轴承支撑和第二电机轴承支撑之间设置有测功机电机,测功机电机的两端输出轴分别安装在第一电机轴承支撑和第二电机轴承支撑上,飞轮轴的端部连接有编码器,测功机电机的外壳上设置有对扭矩进行测量的力传感器。
本实用新型的结构简单,设计合理,实现方便且成本低,功能完备,工作可靠性和稳定性高,实用性强。
申请人:中国兵器装备集团摩托车检测技术研究所
地址:710032 陕西省西安市灞桥区米秦路6号
国籍:CN
代理机构:西安创知专利事务所
代理人:李艳春
更多信息请下载全文后查看。
简述发动机无负荷测公原理及测功方法。

简述发动机无负荷测公原理及测功方法。
下载提示:该文档是本店铺精心编制而成的,希望大家下载后,能够帮助大家解决实际问题。
文档下载后可定制修改,请根据实际需要进行调整和使用,谢谢!本店铺为大家提供各种类型的实用资料,如教育随笔、日记赏析、句子摘抄、古诗大全、经典美文、话题作文、工作总结、词语解析、文案摘录、其他资料等等,想了解不同资料格式和写法,敬请关注!Download tips: This document is carefully compiled by this editor. I hope that after you download it, it can help you solve practical problems. The document can be customized and modified after downloading, please adjust and use it according to actual needs, thank you! In addition, this shop provides you with various types of practical materials, such as educational essays, diary appreciation, sentence excerpts, ancient poems, classic articles, topic composition, work summary, word parsing, copy excerpts, other materials and so on, want to know different data formats and writing methods, please pay attention!发动机无负荷测功原理及测功方法发动机无负荷测功是指在没有外部负载的情况下,通过测定发动机各项性能参数来评估发动机功率输出的一种测试方法。
一种电力系统仿真中自动电压控制模型的建模方法[发明专利]
![一种电力系统仿真中自动电压控制模型的建模方法[发明专利]](https://img.taocdn.com/s3/m/6d0b8011aef8941ea76e05f0.png)
专利名称:一种电力系统仿真中自动电压控制模型的建模方法专利类型:发明专利
发明人:叶小晖,仲悟之,宋新立,叶华,李文锋,吴国旸,刘涛,濮均
申请号:CN201210181177.7
申请日:20120604
公开号:CN102708261A
公开日:
20121003
专利内容由知识产权出版社提供
摘要:本发明公开了一种电力系统仿真中自动电压控制模型的建模方法,对自动电压控制系统的二次电压控制进行建模,考虑了自动电压控制中的控制模式,以及电力系统稳定仿真的算法特点,本发明提出了电力系统仿真中自动电压控制模型的实现方法。
该模型可以正常模拟二次电压控制中的正常模式和紧急模式;实现了两种模式之间的切换过程,使得该模型可以分析自动电压控制在机电暂态和中长期动态中的影响。
同时,该模型还可以模拟二次电压控制与一次电压控制之间的接口;适于电力系统机电暂态及中长期动态的全过程仿真要求。
申请人:中国电力科学研究院,山东大学
地址:100192 北京市海淀区清河小营东路15号
国籍:CN
代理机构:北京安博达知识产权代理有限公司
代理人:徐国文
更多信息请下载全文后查看。
水力测功机实验报告

一、实验目的1. 了解水力测功机的工作原理及结构组成;2. 掌握水力测功机的操作方法及实验步骤;3. 通过实验,验证水力测功机在测量机械设备功率输出方面的准确性和可靠性。
二、实验原理水力测功机是一种用于测试和测量机械设备功率输出的重要工具。
它采用精密的液力传动系统来模拟负载,并通过测量液体的流量和压力变化来计算功率输出。
水力测功机的工作原理基于液压系统的运作原理。
液压系统利用液体的性质传递力和能量。
当主机开始提供稳定的水压时,液体从主机流入测功机台中。
被测试设备通过一系列机械连接件与测功机台相连。
当设备开始工作时,它会施加力或负载到测功机台上,这将导致液体在测功机台的循环中产生压力变化。
通过负载传感器感知到压力变化后,相关的传感器会将这些数据传输给控制系统。
控制系统解析传感器的数据,并计算出设备的输出功率。
三、实验设备1. 水力测功机一台;2. 被测试设备一台;3. 传感器及控制系统一套;4. 连接管道及附件。
四、实验步骤1. 将被测试设备与测功机台连接好,确保连接牢固;2. 启动测功机主机,调节水压至实验要求值;3. 启动被测试设备,使其正常工作;4. 通过传感器实时监测被测试设备的转速、扭矩等参数;5. 记录实验数据,包括被测试设备的输出功率、转速、扭矩等;6. 关闭被测试设备,停止实验。
五、实验数据与分析1. 实验数据:(1)被测试设备的输出功率:P1(单位:kW)(2)被测试设备的转速:n1(单位:r/min)(3)被测试设备的扭矩:T1(单位:N·m)2. 数据分析:(1)计算被测试设备的实际输出功率P2(单位:kW):P2 = T1 × n1 / 9550(2)计算实际输出功率与测功机测得功率的相对误差:相对误差 = |P2 - P1| / P2 × 100%(3)分析相对误差,判断实验结果的准确性和可靠性。
六、实验结论1. 水力测功机可以准确地测量被测试设备的输出功率;2. 实验结果表明,水力测功机具有较高的测量精度和可靠性;3. 通过本次实验,加深了对水力测功机工作原理及操作方法的理解。
伺服机构负载模拟系统设计与动态特性分析_张朋

1226
北京航空航天大学学报
2014 年
法的研究上; 机械式负载模拟器加载精度较高,加 载方式简单,没有多余力,但以往此类模拟器模拟 的伺服机构负载特征较固定,负载调整灵活性差, 且对于发动机喷管的柔性特性模拟不足.
针对伺服机构负载地面模拟,本文提出了一 种结构简单、操作方便、模拟负载调整灵活,可以 实时监测摩擦力矩以及弹性力矩负载大小,同时 能模拟伺服机构负载多自由度特性的机械式负载 模拟系统. 通过对模拟器中的负载在一定范围内 的调整,可以较准确地复现伺服机构实际工作过 程中的动态特性.
机构系统数学模型、伺服阀数学模型、传感器和放
大器数学模型.
3. 1 被试伺服机构系统数学模型
伺服阀的流量方程:
QL = KqXV - KcPL
( 4)
式中,XV 为伺服阀阀芯位移; QL 为伺服阀输出流
量; Kq 为伺服阀流量增益系数; Kc 为伺服阀流量
压力系数; PL 为系统工作压力.
伺服机构为对称液压缸,缸体力平衡方程:
摩擦力矩负载的模拟采用机械抱轴的方式实 现. 对称布置的两个非对称液压缸推动摩擦片,使 其对转动主轴产生正压力,当主轴转动时,摩擦片 与主轴之间产生干摩擦,反映在主轴上为摩擦力 矩. 调整液压缸进油口压力,改变摩擦片与主轴之 间的正压力,可以实现摩擦力矩大小的调节. 摩擦 力矩加载结构原理如图 3 所示. 2. 3 弹性力矩负载
AtPL = - mTxs2 + C0 ( xg - x) s - Kx ( 5)
式中,At 为活塞有效工作面积; mT 为缸体的质量;
建立原理如图 3 所示的机械式伺服机构地面 负载 模 拟 系 统,主 要 包 括 惯 量 盘、弹 性 力 矩 弹 簧 板、摩擦力矩加载机构、伺服机构支撑刚度弹簧板 和喷管柔性模拟质量块. 另外还有液压控制元件、 伺服放大板和力矩传感器等. 2. 1 惯性负载
DM—1型模拟加载测功器的计算机控制系统

DM—1型模拟加载测功器的计算机控制系统
卫雪莉;武雅莉
【期刊名称】《交通与计算机》
【年(卷),期】1990(000)006
【摘要】本文简要介绍发动机试验自动化的概念和发展历史,介绍了 DM—1型模拟加载测功的计算机控制系统,特别是关于随机数据模拟技术和数字滤波器的设计原则。
【总页数】9页(P1-9)
【作者】卫雪莉;武雅莉
【作者单位】不详;不详
【正文语种】中文
【中图分类】TP273
【相关文献】
1.国产电力测功器及其控制系统的可靠性分析 [J], 朱维真;姜正奎;孙玉德
2.DM—1型发动机模拟加载试验台性能测试与分析 [J], 韩天锡;徐卫民
3.DM—1型动态模拟加载测功器的研制 [J], 傅天益;吴永平
4.遥测功率仪与水力测功器测功比较 [J], 商维绿;杨射章;王雁;
5.JT—1型超小型电力测功器的研制 [J], 张金兴
因版权原因,仅展示原文概要,查看原文内容请购买。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
/ 2 4 2 6 1 4 9 7 1 4 9 2 -
测功机动态负载模拟算法
叶 晓, 金振华, 高大威 , 卢青春
( ) 清华大学 汽车工程系 ,汽车安全与节能国家重点试验室 ,北京 1 0 0 0 ቤተ መጻሕፍቲ ባይዱ 4
摘 要 :为了实现 汽 车 动 力 系 统 排 放 及 燃 油 经 济 性 台 架 试 需要采用动态负 载 模 拟 算 法 , 利用测功机对动力系统进 验, 行加载 , 以模拟整车在道路上的负载 。 该文分析并比 较 了 分 别采用逆向模型和前向模型实现动态负载模拟的 2 种 方 法 , 选择基于前向模型跟 踪 的 方 法 设 计 了 测 功 机 动 态 负 载 模 拟 算法 。 通过模型预测车辆速度 , 并采用测功机闭环跟 踪 模 型 车速的方法实现了 测 功 机 动 态 负 载 模 拟 。 该 文 开 发 了 基 于 实时系统的交流测功机控制器 , 并通过实验验证了动 态 负 载 模拟控制算法 的 效 果 。 实 验 结 果 表 明 :该 方 法 具 有 模 拟 精 稳定性较好的特点 , 动态负载模拟算法的实测 转 矩 、 转 度高 、 能 够 满 足 车 辆 动 力 性、 经济性能 速和理论计算值一 致 性 好 , 实验的要求 。 关键词 :测功机 ;台架 ;道路负载模拟 中图分类号 :U 4 6 7. 4 ( ) 文章编号 : 1 0 0 0 0 0 5 4 2 0 1 3 1 0 1 4 9 2 0 6 - - - 文献标志码 :A
收稿日期 : 2 0 0 9 1 2 2 5 - - ,男 ( ,四川 ,博士研究生 。 作者简介 :叶晓 ( 汉) 1 9 8 6—) : 通信作者 :卢青春 ,教授 , E-m a i l l u c t s i n h u a . e d u. c n @ q g
叶 晓 ,等 : 测功机动态负载模拟算法
1 4 9 3
] 待模拟系统的响应 。 例如 , 文[ 采用了前向动力学 8 方程 , 通过实测系统 的 转 矩 来 计 算 待 模 拟 系 统 的 动 态响应 , 并计算出理想的位置响应 , 再使用另一个位 置跟踪控制器使得模拟系统跟踪待模拟系统并输出 ] 测功机 转 矩 。 类 似 的 方 法 描 述 也 出 现 在 文 [ 9 1 0 - ] 中 。 文[ 分析了 前 馈 模 型 跟 踪 方 法 的 频 率 特 性 , 1 1 指出这种算法在应用中有一定的可用频率范围 。 本文分别分析比较了基于逆模型的模拟方法和 前向模型跟踪方法的特点 。 由于前向模型跟踪方法 具有稳定性好的特 点 , 采用前向模型跟踪方法设计 了测功机 动 态 工 况 模 拟 控 制 器 。 基 于 前 馈 跟 踪 算 法, 本文采用了基于 车 辆 负 载 模 型 的 速 度 预 测 与 速 度匹配的方法 , 对测 功 机 道 路 负 载 动 态 控 制 算 法 进 行了研究 。 将驾驶员模型集成到工况模拟控制环节 中, 搭建了基于实时系统的测功机控制器平台 , 开发 实现了汽车动力系统在台 了测功机数据采集 系 统 , 本研究 架上进行标准工 况 模 拟 测 试 的 功 能 。 最 后 , 采用实验表明了基于前向模型跟踪方法可以较好地 适应测功机动态负 载 跟 随 模 拟 的 需 求 , 验证了算法 的有效性 。
] 4 5 - , 化的测功机控制器进行外围开发 [ 或是采用机械 6] 。 负载进行转矩模拟 [
D n a m o m e t e r c o n t r o l l e r a l o r i t h m y g f o r r o a d l o a d e m u l a t i o n s
国外在动态机械负载模拟方面进行的研究较为 ] 文[ 介绍了一种将交流电机作为测功机进行 深入 , 7 负载模拟的装置 , 实现了对线性和非线性负载的模 拟, 其负载模拟的方 法 也 是 采 用 待 模 拟 系 统 的 逆 模 型进行模拟转矩计算 。 由于逆模型在高动态范围可 能因为噪声引起振 荡 , 在类似车辆动态负载模拟这 样高动态的应用 中 并 不 实 用 。 另 一 类 控 制 算 法 , 可 称作前馈跟踪算法 , 采用的是系统的前向模型来计 算待模拟系统的动 态 特 性 , 并闭环控制测功机跟踪
清华大学学报 ( 自然科学版 ) 2 I S S N 1 0 0 0 0 0 5 4 0 1 3年 第5 3卷 第1 0期 - / ) , 1 1 2 2 2 3 N J T s i n h u a U n i v( S c i &T e c h n o l 2 0 1 3,V o l . 5 3, N o . 1 0 C N - g
台架试验是汽车动力系统研究的一个重要手 段 。 台架测 试 系 统 除 了 需 要 满 足 发 动 机 稳 态 效 率 图、 催化剂老化试验等稳态试验需求外 , 还需要具有 动态模拟能力 , 使其 能 测 试 动 力 系 统 在 瞬 态 工 况 下 的经济性和排放性能等 。 要在台架上研究汽车动力 关键是需要测功机能模拟整车在 系统的动态特性 , 动态工况下的负载 , 而动态工况负载模拟算法是实 现负载模拟的关键 。 常见 的 测 功 机 有 水 力 测 功 机 、 电涡流测功机及 电力测功机等 。 其中 , 电力测功机的动态响应快 , 而 适用于动态道路负载模 且可以模拟正负功 率 负 载 , ] 拟 。 文[ 介绍了 目 前 电 力 测 功 机 发 展 现 状 及 该 系 1 并 分 析 了 它 们 的 优 缺 点。 统的一些 典 型 控 制 策 略 , ] 文[ 采用汽车行 驶 阻 力 方 程 直 接 计 算 负 载 转 矩 的 2 ] 文[ 介绍了 方式进行待模拟阻力的确定 。 类似地 , 3 采用电力测功机进 行 风 力 机 风 轮 动 态 模 拟 的 装 置 。 但是 , 这一类采用系统逆模型进行控制的方法 , 在模 拟动态变化较快的 负 载 时 , 容易引入微分误差而导 致系统振荡 。 国内关于测功机的研究或是采用商业
2 动态工况模拟原理
负载模拟装置 ( 测功机 ) 和待测动力系统的结合 点即是模拟点 。 按 照 负 载 的 模 拟 点 所 处 位 置 , 测功 机的模拟点可以在离合器前端 、 离合器后端 、 变速箱 各 种 模 拟 点 分 别 对 应 不 同 的 待 考 察 部 件。 后端等 , 本文拟将研究的动态测功机应用于一款集成有发动 机、 离 合 器、 电机和自动机械式变速箱( a u t o m a t i c ,AMT) 的并联混合动力系统 m a n u a l t r a n s m i s s i o n 的测试实验中 , 因 此 模 拟 点 选 在 变 速 箱 后 端。测 功 机模拟的是变速箱 后 的 差 速 器 、 车轮及车辆的动态 响应 。 台 架 试 验 系 统 结 构 如 图 1 所 示 。 其 中 , 驾驶 员模型根据目标车速曲线和当前实际模拟的车速设 定加速踏板和制动踏板 。 加速踏板通过模拟量输入 而制动踏板信号则直接输入到虚 到待测动力系统 , 拟的车辆模型 。 车辆动态模型根据扭矩仪测试的转 矩转速信号 、 驾驶员制动信号及车辆的配置参数 , 实 时计算车辆的负载 , 并通过测功机加载到传动轴上 。
,为 常 数 ; 其中 : A 是与 速 度 无 关 的 阻 力 ( N) B是 / ( · ) ; 一次速度影响 系 数 ( N k m h-1 ) C 是二次速度
2 / ( · ) 。由于汽车的速度是连 影响 系 数 ( N k m h-1)
) 式( 中的前 3 项都比较 续变化的且变化速度较慢 , 5 容易采用测功机模 拟 , 而车辆在行驶过程中频繁加 减速 , 加速阻力项 F 是测功机道路阻力 a 变 化 较 快, 模拟的主要难点 。
, , , Y E X i a o J I N Z h e n h u a G A O D a w e i L U Q i n c h u n g ( , S t a t e K e L a b o r a t o r o f A u t o m o t i v e S a f e t a n d E n e r y y y g y , D e a r t m e n t o f A u t o m o t i v e E n i n e e r i n p g g , ) T s i n h u a U n i v e r s i t B e i i n 1 0 0 0 8 4, C h i n a g y j g :A A b s t r a c t d n a m i c l o a d e m u l a t i o n a l o r i t h m w a s d e v e l o e d f o r a y g p d n a m o m e t e r c o n t r o l l e r t o e m u l a t e v e h i c l e r o a d l o a d s f o r a u t o m o t i v e y c o n s u m t i o n a n d e m i s s i o n t e s t s . T w o l o a d e m u l a t i o n a l o r i t h m s f u e l p g w e r e d e v e l o e d b a s e d o n i n v e r s e m e c h a n i c a l d n a m i c s( I MD)a n d p y m e c h a n i c a l d n a m i c s( FMD) . T h e FMD a l o r i t h m w a s t h e n f o r w a r d y g c h o s e n f o r t h e r e a l t i m e c o n t r o l l e r f o r i t s s t a b i l i t .T h e FMD y c a l c u l a t e d t h e v e h i c l e r o a d l o a d d n a m i c s b t h e a l o r i t h m r e d i c t i n y y g p g ,w r e f e r e n c e v e h i c l e e e d i t h e e d o n t r o l l e r r a c k i n h e s a s c t p p g t r e f e r e n c e s e e d .T h e l o a d e m u l a t i o n a l o r i t h m w a s i n s t a l l e d o n a p g c o n t r o l l e r i t h e a l t i m e e r a t i n s t e m. A d n a m o m e t e r w a r - o p g y y s d n a m i c t e s t o n t h e d n a m o m e t e r t o e v a l u a t e t h e l o a d o w e r t r a i n y y p e m u l a t i o n l o r i t h m h o w s o o d r e e m e n t i t h h e o r e t i c a l a s g a w t g g , c a l c u l a t i o n s s u e s t i n t h a t t h e a l o r i t h m i s c a a b l e o f e m u l a t i n g g g g p g t h e v e h i c l e d n a m i c l o a d s e f f e c t i v e l . y y : ; K e w o r d s d n a m o m e t e r t e s t b e n c h; r o a d l o a d e m u l a t i o n y y