基于COMPASS探空系统的船载测控设备海上标校技术研究
构建自立自强的海洋科学观测探测技术体系的思考
*通信作者修改稿收到日期:2022年6月18日专题:海洋观测探测与安全保障技术Ocean Observation and Security Assurance Technology引用格式:吴园涛, 任小波, 段晓男, 等. 构建自立自强的海洋科学观测探测技术体系的思考. 中国科学院院刊, 2022, 37(7): 861-869.Wu Y T, Ren X B, Duan X N, et al. Thoughts on constructing self-reliance and self-strengthening marine scientific observation and detectiontechnology system. Bulletin of Chinese Academy of Sciences, 2022, 37(7): 861-869. (in Chinese)构建自立自强的海洋科学观测探测技术体系的思考吴园涛1*任小波2 段晓男3 文质彬1 董丹宏4 殷建平5 沙忠利6 赵宏宇7 蒋 磊8 江丽霞1 沈 刚11 中国科学院 重大科技任务局 北京 1008642 中国科学院 科技促进发展局 北京 1008643 中国科学院 前沿科学与教育局 北京 1008644 中国科学院大气物理研究所 北京 1000295 中国科学院南海海洋研究所 广州 5103016 中国科学院海洋研究所 青岛 2660717 中国科学院沈阳自动化研究所 沈阳 1101698 中国科学院深海科学与工程研究所 三亚 572000摘要 海洋是国家战略必争领域,建设海洋强国必须要提高海洋资源开发能力,发展海洋经济,保护海洋生态环境,坚决维护国家海洋权益。
推动海洋科技实现高水平科技自立自强,是加快建设海洋强国的必然要求。
海洋观测探测技术是认识海洋的基本手段,是海洋资源开发、环境保护和权益维护的重要基础。
Compass-Rules性能培训

Compass-Rules软件简介 Compass-Rules软件简介 ——性能计算分支SRH10 性能计算分支SRH10
SRH10界面 SRH10界面
系统工具栏 菜单栏 标题栏
数据区 图 形 工 具 栏
区
状态栏
上海规范研究所
Compass-Rules软件简介 Compass-Rules软件简介 ——性能计算分支SRH10 性能计算分支SRH10
采用树形结构方便了解 图形对象间的关系并定 位图形对象
Compass-Rules软件简介 Compass-Rules软件简介 ——性能计算分支
改进重点1 增加局部、 改进重点1——增加局部、整体的三维图形 增加局部
上海规范研究所
Compass-Rules软件简介 Compass-Rules软件简介 ——性能计算分支
邦金曲线计算
在船体的每个横剖面上生成甲板顶线, 在船体的每个横剖面上生成甲板顶线,在纵剖面 处生成纵向轮廓线,并分别计算每个横剖面的面 处生成纵向轮廓线, 积及面积矩。对所有单元体,分别计算其总体积、 积及面积矩。对所有单元体,分别计算其总体积、 形心位置及湿表面积等。 形心位置及湿表面积等。
上海规研究所
上海规范研究所
Compass-Rules软件简介 Compass-Rules软件简介 ——性能计算分支SRH10 性能计算分支SRH10
计算原理
输入方法
采用坐标点输入法输入船体几何数据, 采用坐标点输入法输入船体几何数据,用封闭曲 线处理各种几何形体, 线处理各种几何形体,其基本原理是将船体及其 结构划分成单元体逐一进行定义,然后通过切割、 结构划分成单元体逐一进行定义,然后通过切割、 组合形成完整的船体。 组合形成完整的船体。
高精度海洋重力测量中AIRSEA SystemⅡ的水平加速度改正
了提 高测 量 精 度 , 出水 平 加 速 度 改 正 计 算 的 两 种 方 法 , 两 步 法 和 一 步 法 。 为 有 效 地 减 弱 因水 平 加 速 度 改 给 即 正 不 完 善 产 生 的 系统 性误 差 , 出 了水 平 加 速 度 改 正 的预 滤 波 方 法 。 最后 利 用 中 沙 大环 礁 实测 数 据 对 此 改 正 提
AI S A S s mⅡ已经 应 用 于 我 国 的海 洋 重 力 R E yt e 测量 , 它是 AI S A S se R E y tm I的升 级版 , 未来 将
台 的倾 角 , 计 算 水 平 加 速 度 改 正 ; 后 一步 法 不 需
要平 台 的倾 角 信 息 , 是 利 用 观 测 数 据 直 接 计 而
l 水 平 加 速 度 改 正 模 型
1 1两 步 法 .
的读 数产 生影 响 , 种 影 响就 是 所 谓 的水 平 加 速 这
度 改正 。
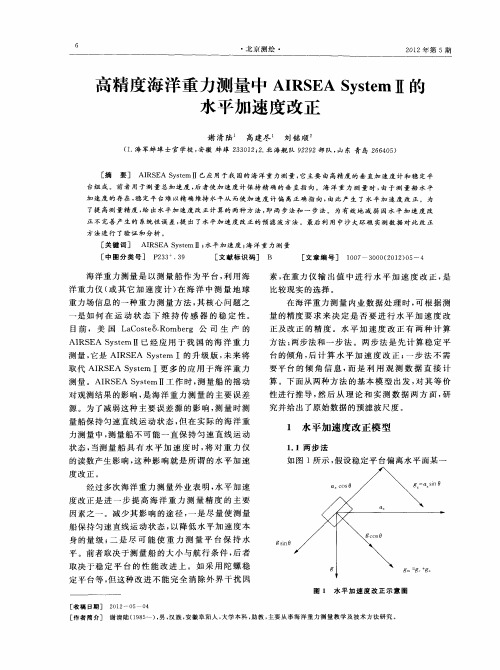
如图 1所示 , 假设稳 定平 台偏 离水 平面某 一
经过 多次海 洋 重 力测 量 外 业 表 明 , 平 加 速 水
度 改正是 进 一 步 提 高 海 洋 重 力 测 量 精 度 的 主 要
[ 摘 要 ] A R E yt Ⅱ 已应 用 于我 国 的 海 洋 重 力测 量 , 主要 由 高精 度 的 垂 直加 速 度 计 和 稳 定平 I S A S se m 它
台组 成 。前 者 用 于 测 量 总加 速 度 , 者使 加 速度 计保 持 精 确 的垂 直指 向 。 海 洋 重 力 测 量 时 , 于测 量 船 水 平 后 由 加 速 度 的 存 在 , 定平 台难 以精 确 维 持 水 平 从 而使 加 速 度 计 偏 离 正 确 指 向 , 稳 由此 产 生 了水 平 加 速 度 改 正 。 为
COMPASS使用说明
c、肋骨位置,该数值前应加上字母F,且肋骨号应为整数,但其后可加减其它 数值;
d、站号,该数值前应加上字母S,且站号应为整数,但其后可加减其它数值; 例:30.26表示自原点向船首30.26;
M-3.25表示自船中向船尾3.25; F43+0.46表示自43号肋位向船首0.46; S4-2.4表示自第4站向船尾2.4。
2.船舶稳性计算服务系统包括下列计算软件: 1) SRH10 船舶几何形体输入、邦金曲线计算(INPUT OF GEOMETRY) 用于输入/修改船体及其附体的几何数据,并计算船舶邦金曲线。本程序采用封闭 曲线方法描述几何形体,适用于单体、对称双体、不对称双体、球鼻首、球尾及隧 道尾等各种线型的船舶。 2) SRH11 静水力计算(HYDROSTATIC CALCULATION) 应用SRH10建立的船舶几何形体数据,计算船舶在不同吃水及纵倾情况下的静水 力曲线数据。可计算/贮存/打印/插值输出各类静水力曲线数据,适用于各种线型船 舶。 3) SRH12 横交曲线计算(CROSS-CURVE CALCULATION) 应用SRH10、SRH11建立的船舶数据,计算船舶在不同吃水或排水量、纵倾及横 倾情况下的横交曲线数据。可采用固定或自由纵倾方法计算/贮存/打印/插值输出横 交曲线数据、进水角及甲板边缘入水角,适用于各种线型船舶。 4) SRH14 装载计算(LOADING CALCULATION) 可用于船舶的装载计算,即对一系列给定的装载工况,计算其总纵强度及完整稳 性,其中完整稳性部分包括中华人民共和国《船舶与海上设施法定检验规则》国际 航行海船法定检验技术规则(1999)中IMO A749(18)号决议和非国际航行海船法定检 验技术规则(1999)两部分,适用于各种类型船舶。 5) SRH15 散装谷物稳性计算(GRAIN-LOADING STABILITY CALCULATION) 可用于计算散货船装载散装谷物时的许用倾侧力矩、倾侧体积矩(满载舱与部分 装载舱)以及装载谷物稳性计算。各类计算根据MSC.23(59)决议“国际散装谷物安 全装运规则”的规定。 6) SRH16 干舷计算(FREEBOARD CALCULATION) 可用于按船舶检验局1999年《船舶与海上设施法定检验规则》之“非国际航行海 船法定检验技术规则”、IMO“1996年载重线公约”计算海船最小干舷、最小船首 高度。 7) SRH18 完整稳性许用重心高度计算(MAX. PERMISSIBLE GRAVITY
船舶系泊问题的试验研究技术

对 于船舶 的系泊 条件 问题 , 目前情
况 下 主 要 采用 物理 模 型 和数 值 计 算 2
种试 验手段 对实 际情况 进行模 拟 , 到 得
所 需参 数 , 实 际工程 提供允 许 系泊及 为 装 卸 作业 的条件 , 国内各研 究单 位 主要
以物理模 型试 验为 主 , 中交 集 团旗 下 的 五 大 水 运工 程 设 计 院也 相 继 采 购 系泊
( ) ? 试 验 : 同靠 泊 角 度 和速 4靠 白 不 度组 合下 , 船舶 在靠泊 过程 中对 码头结 构 的撞击 力 , 定护舷 选 型 以及 优化靠 确
泊 方式 。
1 技术 现 状 . 2
表 1 I C建 议 最 大 允 许 船 舶运 动量 (9 5 PAN 19 ) Tb1 u gs dm m m ao al vs l oi s I N ( 9 5 a. S get  ̄i u l w be es t n A C 19 ) e l em o P
高 峰, 孟祥玮 , 宝友 , 郑 李 焱
( 交通运 输部 天津 水运 工程 科 学研 究所 工程 泥沙交 通行 业重 点实验 室 , 天津 3 0 5 ) 046
摘 要: 随着码头及船舶大型化 的发展 , 船舶 系靠泊安全是港 口设计及使用 中需要考虑的重要 问题之一 。
船舶及停靠的码 头组成 一个极其复杂的相互作用系统 , 自然环境 中的风 、 、 浪 流等动力条件以及不同水 位、 载度 和船型的差异均会影响船舶 系靠泊 的条件 , 其系泊与作业期 间的 6个 自由度运动量 、 系缆力和撞 击力及其能量分 布都 是需要关 心的重要 因素 , 因此前期 的试验研究十分必要 。 文章通过对 目前船舶系靠
1 试 验 内容 及 发 展 现 状
海工装备系泊缆索拉力监测技术与装置研究

第20卷第9期装备环境工程2023年9月EQUIPMENT ENVIRONMENTAL ENGINEERING·143·海工装备系泊缆索拉力监测技术与装置研究蒋镇涛,陈国材,孙梦丹,张涛,郑庆新,朱全华(中国船舶科学研究中心,江苏 无锡 214082)摘要:目的研究缆索拉力的实时监测技术和装置,以保障海工装备的系泊安全。
方法以导向滑轮的主承力构件滑轮轴为研究对象,在保证结构强度的前提下,对滑轮轴结构进行改造,研制缆索拉力监测新结构新装置,将求解大径长比滑轮轴剪力问题转化为测量局部特征点的单向变形,并通过实尺度试验得到标定系数,间接推算缆索拉力,将试验数据与有限元计算结果进行对比,验证监测方法的可行性和精确度。
结果经过仿真分析与试验标定表明,滑轮轴特征点的变形与缆索拉力之间存在线性关系,以缆索拉力280 kN为界,可分段线性拟合缆索拉力标定系数,测点1系数为0.312 4和0.137 6,测点2系数为0.269 9和0.098 2。
结论本文研究的监测技术和装置能够较为准确地监测海工装备系泊缆索的实时拉力,兼具高可靠性、低成本、易实施的特点。
关键词:海工装备;系泊;缆索拉力;监测;新结构;标定系数中图分类号:U667.4 文献标识码:A 文章编号:1672-9242(2023)09-0143-09DOI:10.7643/ issn.1672-9242.2023.09.016Monitoring Technology and Device of Marine Equipment Mooring Cable Tension JIANG Zhen-tao, CHEN Guo-cai, SUN Meng-dan, ZHANG Tao, ZHENG Qing-xin, ZHU Quan-hua(China Ship Scientific Research Center, Jiangsu Wuxi 214082, China)ABSTRACT: The main way of mooring marine equipment is that the mooring cable passes through the guide pulley to realize the connection between the cable winder on the ship and the bollard of the wharf. The work aims to study the real-time moni-toring technology and device of cable tension to ensure the mooring safety of marine equipment. With the pulley shaft, the main load-bearing member of the guide pulley, as the research object, the pulley shaft structure was reformed on the premise of en-suring the structural strength, and new structures and devices for monitoring the cable tension were developed. Solution to shear problem of the pulley shaft with large aspect ratio was transformed into measurement of the unidirectional deformation of local characteristic points, and the calibration coefficient was obtained through the full-scale test, and the cable tension was indirectly calculated. The feasibility and accuracy of the monitoring method were verified by comparing the test data with the finite ele-ment calculation results. Through simulation analysis and experimental calibration, it was shown that there was a linear rela-tionship between the deformation of the characteristic points of pulley shaft and the cable tension. The cable tension calibration coefficient could be fitted linearly in segments with the cable tension of 280 kN as the boundary. The coefficients of measuring point 1 were 0.312 4 and 0.137 6, and the coefficients of measuring point 2 are 0.269 9 and 0.098 2. The technology and device收稿日期:2023-06-16;修订日期:2023-09-04Received:2023-06-16;Revised:2023-09-04基金项目:国家重点研发计划(2021YFC2802300)Fund:National Key R&D Program of China (No.2021YFC2802300)引文格式:蒋镇涛, 陈国材, 孙梦丹, 等. 海工装备系泊缆索拉力监测技术与装置研究[J]. 装备环境工程, 2023, 20(9): 143-151.JIANG Zhen-tao, CHEN Guo-cai, SUN Meng-dan, et al. Monitoring Technology and Device of Marine Equipment Mooring Cable Tension[J]. Equipment Environmental Engineering, 2023, 20(9): 143-151.·144· 装 备 环 境 工 程 2023年9月established in this work can accurately monitor the real-time tension of mooring cables of marine equipment, and have the char-acteristics of high reliability, low cost and easy operation.KEY WORDS: marine equipment; mooring; cable tension; monitoring; new structure; calibration coefficient随着我国海工装备向大型化、智能化的方向发展,国家及行业对海工装备安全性、配套装备智能化水平更加重视。
基于高精度GPS的海上浮标位置检测研究

基于高精度GPS的海上浮标位置检测研究一、引言海上浮标是一种在海洋中用于定位、测量和监测海洋水域状态的设备。
它们通常被放置在海底或海面上,以提供准确的海洋数据,如水流、潮汐、海浪、水温、水深等。
这些数据对于海洋科学、海洋工程和海上交通等领域非常重要。
因此,准确测量海上浮标的位置是至关重要的。
在过去,基于传统GPS技术的浮标位置检测受到了许多限制。
然而,随着高精度GPS技术的发展和应用,基于高精度GPS的海上浮标位置检测的研究成为了热点领域。
二、高精度GPS技术GPS(Global Positioning System)是一种基于卫星的定位系统,可用来确定地球上物体的位置。
GPS由美国空军所建,由多颗卫星、地面控制站和接收设备组成。
GPS接收机通过接收多颗卫星的信号,计算其位置,并提供准确的时钟信息,从而计算出接收器的位置。
高精度GPS是一种通过使用差分GPS技术,可提供相比传统GPS更高的精度的GPS技术。
它利用两个或多个接收器,一个位于已知位置,另一个位于未知位置,来解决信号误差问题。
高精度GPS技术可提高浮标位置的可靠性和准确度,特别是在海上位置检测领域。
三、基于高精度GPS的海上浮标位置检测方法1. RTK(Real-Time Kinematic)RTK是一种采用相位差分技术,可提供高精度位置信息的GPS 技术。
RTK技术利用GPS接收机之间的信号传输,在实时计算接收机的位置,并作为基础参考站对比在移动接收机上接收到的信号,从而确定位置。
这种技术通常需要至少两个接收器,一个用于作为基础参考站,另一个用于检测移动接收器的位置。
RTK技术可提供高达1厘米的定位精度,因此被广泛应用于航海、测绘、地形测量和精确农业等领域。
2. PPP(Precise Point Positioning)PPP技术是一种利用单一接收机,可提供高精度位置信息的GPS技术。
与RTK技术不同,PPP技术不需要基础参考站,而是利用全球参考框架和大量的历史卫星轨道信息,来计算接收器的位置。
基于北斗的航标远程监测系统分析
基于北斗的航标远程监测系统分析随着全球经济的快速发展和对海上运输的需求逐渐增加,航标远程监测系统在海上交通管理中扮演着非常重要的角色。
随着技术的进步,人们对航标远程监测系统的要求也越来越高,北斗卫星导航系统的发展正好满足了这一需求。
本文将对基于北斗的航标远程监测系统进行分析,探讨其优势和应用前景。
基于北斗的航标远程监测系统是指利用北斗卫星导航系统进行航标的远程监测和管理。
北斗卫星导航系统是中国自主研发的卫星导航系统,具有全球覆盖、高精度、高可靠性等特点,适用于海上、空中、陆地等领域。
基于北斗的航标远程监测系统主要包括北斗卫星导航终端、监测中心、航标设备等组成,通过北斗卫星导航系统提供的定位和通信服务,实现对航标的遥测、遥控和遥测等功能,为航行安全提供支持。
1. 全球覆盖能力。
北斗卫星导航系统具有全球覆盖能力,无论航标设备位于哪个地方,都可以通过北斗卫星进行定位和通信,实现远程监测和管理。
2. 高精度定位。
北斗卫星导航系统具有米级以上的定位精度,可以精确获取航标设备的位置信息,为航行提供准确的参考数据。
3. 可靠性强。
北斗卫星导航系统的通信链路稳定可靠,不易受自然环境和人为干扰影响,保障航标远程监测系统的正常运行。
4. 成本低廉。
相比传统的航标远程监测系统,基于北斗的航标远程监测系统的建设和运营成本相对较低,具有很强的经济实用性。
1. 海上航标监测。
基于北斗的航标远程监测系统可以对海上航标设备进行遥测和遥控,及时发现设备故障并进行处理,提高海上航行的安全性。
2. 海洋环境监测。
结合北斗卫星的全球覆盖能力,基于北斗的航标远程监测系统还可以用于海洋环境的监测,包括海洋气象、海洋水文、海洋生态等方面,为海洋资源开发和保护提供数据支持。
3. 海事管理。
基于北斗的航标远程监测系统可以与海事管理系统相结合,实现航行船舶和航标设备的信息共享和协同管理,提高海上交通管理的效率和水平。
4. 海上应急救援。
在海上紧急情况下,基于北斗的航标远程监测系统可以为应急救援提供精准的位置信息和通信支持,协助救援船舶和飞机快速准确地找到事故现场。
海上试验场综合数据集成与管理系统设计与实现的开题报告

海上试验场综合数据集成与管理系统设计与实现的开题报告一、选题背景与意义海洋试验场是一种进行实验和测试的生态系统,作为海洋资源开发和环境保护的重要工具,得到了广泛的应用。
海上试验场的规模越来越大,试验项目也越来越复杂,需要大量的各种类型的数据以支持试验的进行和管理。
同时,试验数据的质量和准确性也对试验结果的精确性和可靠性有着重要的影响。
因此,一个集成化的数据管理系统对于海上试验场的监管和管理起到了至关重要的作用。
本文拟就海上试验场综合数据集成与管理系统设计和实现进行研究,旨在解决现有海上试验场的数据管理问题,提高试验数据的采集、存储、处理、分析和利用效率,保证试验数据的质量和可靠性。
本文希望通过设计一个海上试验场综合数据集成与管理系统,为海上试验场管理人员提供一种可靠、高效、方便的数据管理工具,为试验工作的顺利进行提供有力的保障。
二、研究内容1. 海上试验场数据管理的现状和问题分析:本章将分析海上试验场的数据管理现状和存在的问题,探讨数据管理的必要性和集成化管理的好处。
2. 海上试验场综合数据集成与管理系统的设计:本章将设计一个海上试验场综合数据集成与管理系统,包括系统的结构设计、模块设计、数据库设计等方面的内容。
3. 海上试验场综合数据集成与管理系统的实现:本章将对系统进行实现,包括界面设计、功能实现等方面的内容。
4. 海上试验场综合数据集成与管理系统的测试与评估:本章将对系统进行测试和评估,对系统的功能、性能、安全性等方面进行评估,以验证系统的可行性和实用性。
三、研究方法本文将采用文献调研和实验方法开展研究。
1. 文献调研:通过对海上试验场数据管理现状、数据集成与管理系统的研究成果等方面进行系统的梳理和总结,引入国内外学者对类似问题的研究成果,对研究问题进行深入的分析和探讨。
2. 实验方法:通过设计并实现一个海上试验场综合数据集成与管理系统,对系统的功能、性能、安全性、可靠性等方面进行实验和测试,以验证其可行性和实用性。
基于C#设计的空管二次雷达显示系统
Science & Technology Vision 科技视界 17
Science & Technology Vision
科技视界
的目标显示尧地图显示尧统计分析尧记录回放以及功能 配置等曰 二是数据层袁 数据层部署了相应的数据库及 数据文件袁包括消息交互尧数据库管理尧数据访问控制 以及数据的备份及日志记录等曰 三是平台层袁 主要处 理基础计算以及配置相应的显示组件等袁 其提供了对 网络尧硬件以及操作系统的多种运算袁包括并行计算尧 网络通信以及其他跨系统跨平台应用遥 2.2 软件部件
在数据接口上袁 为了实现系统与二次雷达主机的 数 据 交 互 袁 采 用 UDP 协 议 进 行 通 信 袁 完 成 系 统 数 据 的 收 发 尧 存 储 及 本 地 重 演 曰 PPI 显 示 则 参 照 现 有 运 行 系
上海崇明区事业单位考试真题2022

2022年上海市崇明区事业单位招聘考试试题第一部分常识判断1.以科技创新催生新发展动能。
实现高质量发展,必须实现依靠创新驱动的()型增长。
我们更要大力提升自主创新能力,尽快突破关键核心技术。
A.内涵B.集约C.跨越D.科技正确答案:A2.2022年4月27日,首届大国工匠创新交流大会开幕,主题为()。
A.一技在手,振兴中华B.刻苦专研,甘为人梯C.技能强国,创新有我D.工匠筑梦,精彩人生正确答案:C3.2022年5月15日,()Ⅲ型浮空艇从海拔4270米的中科院珠峰站附近发放场地升空,升空高度达到4762米,创造了海拔9032米的大气科学观测世界纪录。
A.海斗一号B.极目一号C.远望一号D.陆巡一号正确答案:B4.国家审计下属单位财务的使用情况,该行为属于:A.专门监督B.司法机关监督C.外部监督D.部门监督正确答案:A5.()被称为“中国科学史上的坐标”,内容涉及天文、数学、物理、化学、生物等各个门类学科,价值非凡,书中的自然科学部分,总结了中国古代、特别是北宋时期科学成就。
1/ 16A.《考工记》B.《论衡》C.《墨经》D.《梦溪笔谈》正确答案:D6.“金砖国家”囊括了全球主要的新兴市场国家,下列不属于“金砖国家”的是:A.韩国B.巴西C.印度D.中国正确答案:A7.急需引进的高层次、短缺专业人才,具有高级专业技术职务或博士学位的人员,可以采取( )的方式招聘。
A.推荐B.面试C.直接考核D.面议正确答案:C8.以组织的不同功能和作用来区分,行政组织可分为领导机构、执行机构、监督机构、咨询机构、信息机构、辅助机构、派出机构等。
下列属于咨询机构的是:A.国务院发展研究中心B.县统计局C.省政府驻京办D.市广播电视局正确答案:A9.随着生产和生活垃圾的急剧增加,垃圾处理已成为一个重要的社会和经济问题,而有关专家却指出“垃圾是放错了地方的资源”。
将垃圾看作是放错了的资源,这句话:A.坚持了矛盾的分析方法,看到矛盾双方在一定条件下相互转化B.坚持了联系的观点,世界上一切事物都是相互联系的C.违背了矛盾普遍性和特殊性的辩证关系D.混淆了矛盾的主次方面,看不到矛盾主要方面决定事物性质正确答案:A10.通报的表达方式侧重于 ( )。
船舶PMS控制器设计及关键技术研究
1 P MS体 系结 构
以配置 6套发 电机组 的船舶 电力系统 为研究 对象 , 介绍 P MS体 系结 构 。控 制 系统 采用 2 冗余计 算机 层
ARM e h o o y i d sg e . Th e ta e iso p i zn o rma a e e ta e c mp r d a d t e c n l s n i d a . t c n l g e in d s r e s r t g e fo t mii g p we n g m n r o a e n h o cu i r wn o s
GONG i x 一
。 ZH EN G a — h n , S ILi —o g Yu n z a g H nl n
( h n h iS i n hp i gRe e r h I s i t ,S a g a 2 0 3 ,Ch n ) S a g a h p a d S i pn s ac n tt e h n h i 0 1 5 u ia
这方 面的研究 起步 较晚 , 有实 质性 投入并 具有 一定 规模 的科研 项 目只是 近 几年 的事 。因此 , 具 开展 P MS及
关键技术 研究 , 对打 破 国外 厂商 的垄 断具有 重要 意义 , 而且该 系统将 随着 电力 推进船 舶 的普 及而得 到广 泛使 用, 其市 场应用 前景 十分广 阔 。 由于 P MS接 口复 杂 、 制难 度大 、 术含 量 高 , 行该 项科 研 工作 对 推进 船 控 技 进 舶 自动 化技术 的发 展也具有 重要 意义 。
Ab t a t sr c :As o e o h e o to y tm s h rn o r ma a e n y tm s r s o sb e f r c n r l e o to n n ft e k y c n r ls s e ,t e ma ie p we n g me t s s e i e p n i l o e ta i d c n r la d z ma a e n fee ti o r n g me to lc rcp we .Th i u c i n n h y tm t u t r f eman f n to sa d t e s s e s r c u eo PM S a e d s u s d id o o to l rb s do r ic s e ;a k n f n r l a e n c e
基于北斗系统的海上VHF台站跟踪系统设计

处理;当北斗软件系统需要发送短报文时也通过串口推送 给北斗设备,那么在收发短报文过程中的控制逻辑就由北 斗软件系统对接收和发送的短报文进行解析、包装、分类 处理。北斗位置监控平台除了接口程序上对短报文进行一 系列解析、包装、转发、操作外,还对不同的北斗硬件进行 不同控制,目前支持:北斗多通道收发单元、北斗指挥机 等。可管控设备的运行状态,对信号状态、串口状态、通信 状态、通信频度等进行控制。
收稿日期:2020-08-13 ;修回日期:2021-05-09 第一作者简介:廖铭胜(1975—),男,江西峡江人,本科,高级工程师,主要从事 VTS 设备管理工作。
60
工程技术 Engineering Technology
态位置数据可用北斗船载终端上报,并在电子地图上显 示出来,实现有效监管。在无网情况下,船舶管理中心和 船舶双向进行北斗短报文信息互通,船舶管理中心可实 时查看远程监控船舶位置/轨迹信息,实现调度指挥,并 保存船舶的运行轨迹数据和船舶电台使用的状态[3]。
所以,为保障水上交通安全和良好的无线电通信环 境,维护无线电使用规范和原则,监督船舶电台的配置和 使用,减少非法使用或非法干扰水上交通通信的情况, 更好地实现对船舶电台相关信息及坐标位置的科学、有 效管理,提出利用现有北斗短报文RDSS通信技术、北斗 RNSS定位技术、电子海图和网络技术相结合,建立一个 基于北斗导航的海上VHF台站跟踪管理系统,为海上船 台的通信秩序管理提供可行技术方案,本技术的创新设 计和海上应用尚属首次,对于海洋船舶无线电电台(尤其 是VHF台站)管理具有十分重要的意义[2]。
台之间互相通信,《中华人民共和国无线电管理条例》制定 一定的数据逻辑发送到管理中心平台,实现海事管理部
了无线电管理、空中电波秩序维护、无线电频谱资源开发 利用、各种无线电业务的正常保证等相关要求[1],水上无线
基于空泡压力的水下航行体深度测量系统设计

基于空泡压力的水下航行体深度测量系统设计解春雷;祝树生;詹景坤;王小辉;仇公望【摘要】Real-time measuring accurate depth data is very important to mobile control of underwater vehicle,traditional strap-down navigation solution measuring depth data is influence by accumulated error of inertial equipment.This paper take research on underwater vehicle depth measure method based on pressure of vacuole,found an depth measure method based on “static pressure in vacuole + dynamic pressure +cavitation number”,and completed a set of prototype measure sy stem, and pass the verification by cistern simulated test,provide new ideas for apllication of vehicle with vacuole.%实时获取准确的深度信息对水下航行体的机动控制至关重要,传统的捷联式导航解算得到的深度信息受惯性器件的累计误差影响较大。
本文开展了基于空泡压力的水下航行体深度测量方法技术研究,建立了一套基于“空泡内静压+动压+空化数”的深度测量方法,并完成了一套样机测量系统的设计,最后通过水池模拟试验来进行验证,为带空泡高速航行体走向应用提供了新的思路。
【期刊名称】《电子测试》【年(卷),期】2016(000)011【总页数】4页(P5-7,21)【关键词】水下航行体;空泡;深度测量;测量系统【作者】解春雷;祝树生;詹景坤;王小辉;仇公望【作者单位】中国运载火箭技术研究院研发中心,北京,100076;中国运载火箭技术研究院研发中心,北京,100076;中国运载火箭技术研究院研发中心,北京,100076;中国运载火箭技术研究院研发中心,北京,100076;中国运载火箭技术研究院研发中心,北京,100076【正文语种】中文空泡是一种物理现象,是液体中空化现象的一种表现形式。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
基于 COMPASS 探空系统的船载测控设备海上标校技术研究
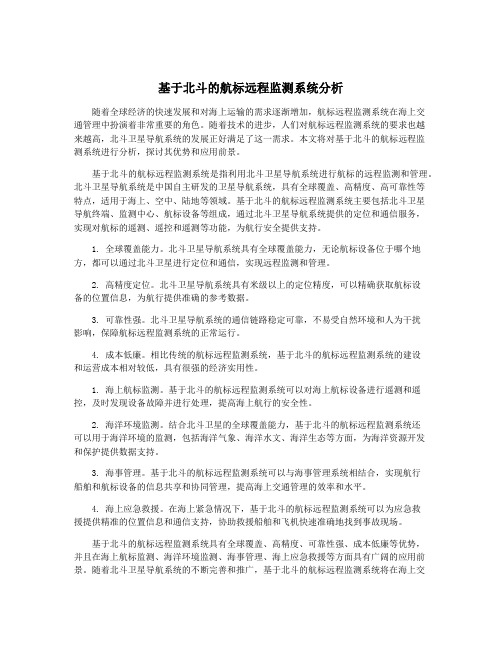
图 3 船载 GPS 探空标校系统数据处理流程图
4 数学模型及精度分析
4.1 船载测控设备与标校点的位置数据计算
4.1.1 大地坐标系(λ 地坐标系(λ, (λ,L,H)转换到地心坐标系 H)转换到地心坐标系(Xe 转换到地心坐标系(Xe, (Xe,Ye,, Ye,,Ze) 船载测控设备位置、标校点的大地坐标(λ,L,H)数据换算成地心坐标系的直角坐标 (Xe,Ye,Ze)。 地心坐标系的原点在地球中心,各坐标轴与地球固定连接,Xe 、Ye 轴互相垂直并固定在赤道平面上, Ze 轴与地球自转轴重合,由地心向外指向格林威治子午圈与赤道的交点。转换公式为
3 船载 COMPASS 探空标校系统
3.1 船载 COMPASS 探空系统
高空气象数据是电磁波折射及传输时延修正的重要参数,对提高测控设备的测量精度有重要意义。 因此,气象探测设备是测量船必不可少的重要设备之一。目前,测量船装备使用 GPS 高空探测系统。 该系统由气球携带的 GPS 数字探空仪和船载接收处理设备和两部分组成,利用 GPS 卫星信号实时测定 探空气球自由上升过程的飞行轨迹, 由此计算出气球飞行过程的速度矢量, 从而得到任意高度的风矢量。 此外,在探空仪中配置了各类温、湿、压传感器,可以测出不同高度的温度、压力、相对湿度等气象参 数。设备组成如下图 1[1]:
2
CSNC2010 第一届中国卫星导航学术年会 北京
COMPASS 系统建成后, 利用 COMPASS 系统替代现有气象探空系统中的 GPS 定位系统, 就可以很 快建成船载 COMPASS 探空系统,将新技术应用到航天测量船,为航天测控任务服务。
3.2 船载 COMPASS 探空标校系统
3.2.1 标校原理 船载 COMPASS 探空标校系统采用“硬比较法”标校船载测控设备。所谓“硬比较法”就是选用测量精 度更高的测量设备作为校准设备,与被鉴定设备同时跟踪测量同一目标,然后按被鉴定设备的测量元素 比较两者的测量结果,进而获得被鉴定设备的系统误差和随机误差。船载测控设备 COMPASS 探空标校 系统基本原理是: 1)利用 COMPASS 高空探测设备跟踪探空气球获取气球的高精度定位,实时录取标校点(气球)的经 纬度、高程数据,形成标校点 COMPASS 位置数据文件 A,文件 A 记录格式为(时间、经度、纬度、高 度); 2)通过测量船船姿船位系统实时记录测控天线的大地坐标文件 B,文件 B 记录格式为(时间、经度、 纬度、高度); 3)船载测控设备跟踪信标球,实时录取测量数据文件 C,文件 C 记录格式为(北京时间、距离、方位 角、俯仰角); 针对数据文件 A、B,通过坐标变换、静态解算、时空统一,求出测量船测控天线与标校点之间的 相对空间数据文件 D(北京时间、距离、方位角、俯仰角)。对文件 C 和文件 D 的距离、角度数据进行统 计处理,即可获得船载测控系统误差。基于 COMPASS 定位数据文件 A、B 数据精确可靠,则该系统完 全可以作为船载测控设备的标校依据,具体数学模型和精度分析如下文。 3.2.2 系统组成
基于 COMPASS 探空系统的船载测控设备海上标校技术研究
进行检查和调整。 一般来讲,标校工作主要分为轴系误差、零位误差和相关检测项目。海上无塔标校检测必须利用施 放信标球检验设备跟踪性能(标定定向灵敏度和交叉耦合)、修正距离零值、标定光电偏差等工作。可以 完成以下目的: 1)检验设备跟踪性能:主要是任务前无线电测量设备跟踪接收机的和差相位零点和定向灵敏度标 定,相当于陆上测量设备的对标校塔标校。 2)距离零值标校:经纬仪和脉冲雷达同时跟踪测量同一信标球(或标定球);同步录取距离数据,将 经纬仪数据经各种修正以及脉冲雷达大盘不水平修正后转换到雷达测量坐标系中进行对比,统计得到脉 冲雷达距离零值。 3)标定光电偏差:设备跟踪信标球,当斜距大于 10km 时,录取标校球在标校电视中的脱靶量,统 计并修正光轴与电轴的视差后获得光电偏差。 海上施放信标球标校存在几个突出问题:1)光学设备受天气影响严重;2)光学设备跟踪目标范围较 小,一般经纬仪测距能力为 10km 以内;3)长期的海上航行,微光电视自身轴系偏差较大,利用微光电 视进行光电偏差标定误差较大,直接影响测控设备测量精度。
CSNC2010 第一届中国卫星导航学术年会 北京
基于 COMPASS 探空系统的船载测控设备海上标校技术研究
王益忠 周朝猛 刘咏
(中国卫星海上测控部,江苏 江阴,214431) 摘 要:航天测量船船载测控设备载 COMPASS 探空仪
的船载测控设备海上无塔标校系统。通过对测量船现有 GPS 探空设备局部改进、气象探空设备和测控设备融合、以及建 立数学模型和数据综合处理等方法手段创新海上无塔标校方法。该系统克服了船载测控设备海上标校对光学仪器的过分 依赖和利用 GPS 定位系统精度不高等因素,初步数据分析表明该技术的应用极大提高了航天测量船海上测量精度,是 COMPASS 系统在航天测控领域重要应用方向之一。 关键词:船载测控设备;海上无塔标校;COMPASS 探空仪;光电偏差
The investigation on maritime calibration technology based on the COMPASS sounding system of the shipborne M&C equipment
WangYiZhong ZhouChongMeng LiuYong
X Y Z
X δX X δY = H Y − Y = H δ Z Z 标 Z 设备
(2)
− sin λ0 其中: H = − sin L0 cos λ0 cos L0 cos λ0
1 引言
航天测量船船载测控设备海上标校技术一直是提高测控精度的关键难题之一。测量船测控设备精度 标校和鉴定主要采用坞内标校、海上校飞、码头有塔标校、海上无塔标校验证等一系列程序来完成。纵 观整个标校过程可以发现:海上无塔标校精度直接决定了测控设备的测控精度。因此,海上无塔标校技 术一直是测控系统技术攻关重点和难点。目前测量船主要采取海上施放信标球来进行测控设备的任务标 定,其过程极大依赖于测控光学设备测量精度,多次任务测试证明信标球标定光电偏差结果随机误差较 大,给测控设备测量精度带来很大不确定性。因此,研究测控设备新的海上标定方法非常必要。目前, 我国北斗卫星导航系统即将建成并投入使用, 本文提出基于 COMPASS 探空仪的船载测控设备海上无塔 标校系统的设计与应用。
X e ( N + H ) cos L cos λ Y = ( N + H ) cos L sin λ e 2 Z e N (1 − e ) + H sin L
[
]
(1)
由此可以得到[Xe,Ye,Ze]T 标,[Xe,Ye,Ze]T 设备。式中:H 为高程数据;N=a/(1-e2sinL)1/2;a 为地 球的长半轴;e2 为第一偏心率的平方;在 WGS-84 坐标系中,a=6378.137, e2=0.00669437999013。 4.1.2 地心坐标系(Xe, Ye,Ze)转换到地平坐标系(X,Y,Z) 地平坐标系的原点位于测量设备三轴中心,X 轴为正东方向,Y 轴为正北方向,Z 轴垂直于 XOY 平面,符合右手螺旋法则。标校点在测量地平坐标系中的位置(X,Y,Z)为
(China Satelite Maritime Tracking&Control Department,Jiangsu Jiangyin,214431,China)
Abstract: The maritime calibration technology on the measure ship is the main approach to improve the precision of the equipment. This disquisition researched the way of no tower calibration system using the shipborne COMPASS sounding apparatus. Thanks to the amelioration of the existing GPS sounding equipment and the combination of weather and measure equipment, also to the mathematical model and synthetical data disposal, it brought the innovation of the no tower calibration on the sea. This production reduced the excessive dependence on the optical apparatus in the maritime calibration and the imprecision of GPS system. The original data process and analysis proved that this technology can ensure the precision of the no tower maritime calibration credibly and can be an important application of the COMPASS system in space telemetry. Key words:Shipborne M&C equipment;no tower maritime calibration;COMPASS sounding apparatus;Photoelectric error
cos λ0 − sin L0 sin λ0 cos L0 sin λ0