DSY6简介
惯性矩抵抗矩面积矩
A
A
二、形心:(等厚均质板的质心与形心重
合。 )
¯x
x dm m
m
质心 :
y dm
¯y m
m
等厚 均质
等厚 均质
x trd AtrA
A
xd A A
A
Sy A
y trd AtrA
A
yd A
A
A
Sx A
等于形心坐标
累加式:x y
xi Ai
A (正负面积法公 ) yi Ai
A
¯x y¯
Sy Ax Ai xi Sx Ay Ai yi
例 I-1-1 是确定下图的形心。
解 : 组合图形,用正负面积法解之。
C2 C1
y
1、用正面积法求解,图形分割及坐标如
C1(0,0) 图(a)
C2(-35,60)
x
x xiAi x1A1x2A2
、建立坐标系。
Байду номын сангаас
、计算面积和面积矩
、求形心位置。
x
Sy A
y
Sx A
xi Ai A yi Ai A
、建立形心坐标系;求:Iyc , Ixc , Ixcyc ,
、求形心主轴方向
——
0 tg20
2Ixcyc Ixc Iyc
、求形心主惯性矩 IIx y0 0ccIxc 2Iyc(Ixc 2Iyc)2Ix 2cy
xy
x
Ix
Iy
IP 2
d4
64
6位数码管显示电路设计与调试
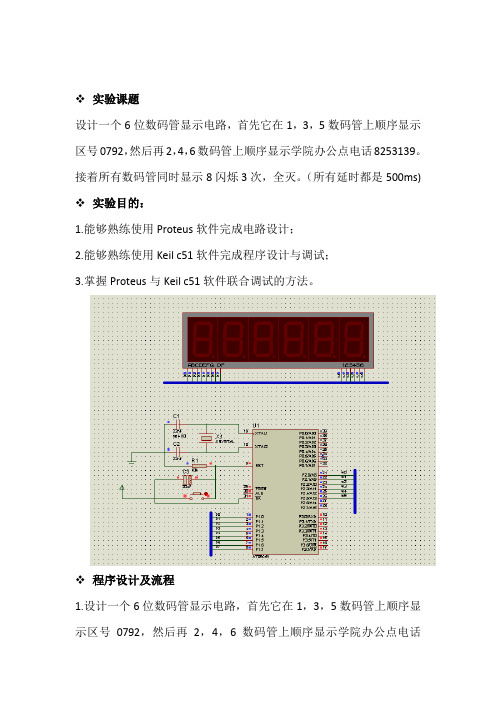
实验课题设计一个6位数码管显示电路,首先它在1,3,5数码管上顺序显示区号0792,然后再2,4,6数码管上顺序显示学院办公点电话8253139。
接着所有数码管同时显示8闪烁3次,全灭。
(所有延时都是500ms) 实验目的:1.能够熟练使用Proteus软件完成电路设计;2.能够熟练使用Keil c51软件完成程序设计与调试;3.掌握Proteus与Keil c51软件联合调试的方法。
程序设计及流程1.设计一个6位数码管显示电路,首先它在1,3,5数码管上顺序显示区号0792,然后再2,4,6数码管上顺序显示学院办公点电话8253139。
接着所有数码管同时显示8闪烁3次,全灭。
(所有延时都是500ms)#include <reg51.h>/*weidust program*/#define uchar unsigned char#define uint unsigned intuchar code DSY_quhao[]={0x3f,0x07,0x6f,0x5b};uchar code DSY_haoma[]={0x7f,0x5b,0x6d,0x4f,0x06,0x4f,0x6f};uchar code DSY_jieshu[]={0x7f,0x00,0x7f,0x00,0x7f};void Delay(uint x){uint i,j;for(j=x;j>0;j--)for(i=110;i>0;i--);}void main(){ uchar i;P2=0x2a;for(i=0;i<4;i++){P1=DSY_quhao[i];Delay(500);}P2=0x15;for(i=0;i<7;i++){P1=DSY_haoma[i];Delay(500);}P2=0x00;for(i=0;i<5;i++){P1=DSY_jieshu[i];Delay(500);}P1=0x00;while(1);}2.Proteus与Keil c51 联合调试实验结果:结果分析(出现的问题及其原因)没有出现问题实验总结学会了设计6位数码管显示电路。
CPPLapack_Tutorial-Japanese
CPPLapack Tutoriale-mail:ueshima@a.mei.titech.ac.jpCPPLapack CP-PLapack CPPLapack1CPPLapack1.1CPPLapack linux1.2linuxapt-get install blaslapackapt-get install lapackBLAS(yum)LAPACK BLAS CPPLapack•mkdir~/local mkdir~local/lib~/local/lib•cd~/local/lib•/projects/cpplapack/CPPLapack cpplapack-XXXX_XX_XX.tar.gz•tar xzf cpplapack-XXXX_XX_XX.tar.gz CPPLapack•lu-s cpplapack-XXXX_XX_XX cpplapackCygwin VC++CPPLapack1.3cpplapack.h CPPLapackiostream cmathA= 175346#include‘‘cpplapack.h’’void main(void){CPPL::dgematrix A(2,3);A(0,0)=1;A(0,1)=7;A(0,2)=5;A(1,0)=3;A(1,1)=4;A(1,2)=6;std::cout<<A<<std::endl;}main.cpp1.4˜/local/lib/cpplapack/makefiles Makefile.g++main.cpp>mv Makefile.g++MakefileMakefileOBJECTS=main.o>makeA.OUT>makeg++-c main.cpp-O2-Wall-Wno-unknown-pragmas-I/home/hoge/local/lib/cpplapack/includeg++main.o-O2-Wall-Wno-unknown-pragmas-L/usr/local/lib/LAPACK-L/usr/local/lib/BLAS-llapack-lblas-lg2c-lm-o A.OUT1.5A.OUT>./A.OUT>./A.OUT1753462()2.1CPPLapackdgematrix.dgesv dgbmatrix.dgbsv dsymatrix.dsysv zgematrix.zgesv zgbmatrix.zgbsv zhematrix.zhesv2.2doubleAx=yxyA.dgesv(y);2.3•LU A•AL ,U(L)yx2.411−2−3213−12x 0x 1x 2 = 123//====================================================================[include]#include‘‘cpplapack.h’’//=======================================================================[main]/*!main*/int main(int argc,char**argv){////make dgematrix A////CPPL::dgematrix A(3,3);A(0,0)=1;A(0,1)=1;A(0,2)=-2;A(1,0)=-3;A(1,1)=2;A(1,2)=1;A(2,0)=3;A(2,1)=-1;A(2,2)=2;////make dcovector y////CPPL::dcovector y(3);y(0)=1;y(1)=2;y(2)=3;////solve Ax=y////A.dgesv(y);////print////std::cout<<‘‘x=\n’’<<y<<std::endl;return0;}x=121]3()3.1CPPLapackdgematrix.dgels dgematrix.dgelss zgematrix.zgels zgematrix.zgelss3.2doubleAx=yAMNxyA.dgels(y,r);A.dgelss(y,S,RANK,RCOND);dgelsm ≥nm ≤nrrdgelssSdcovectorRANK AdoubleRCONDAdouble-1.0()3.3•AdgelsQR,LQdgelssyx•dgelsAdgelss3.441351−1220−315x 0x 1x 2=8205//====================================================================[include]#include‘‘cpplapack.h’’//=======================================================================[main]/*!main*/int main(int argc,char**argv){////make dgematrix A////CPPL::dgematrix A(4,3);A(0,0)=4;A(0,1)=1;A(0,2)=3;A(1,0)=5;A(1,1)=1;A(1,2)=-1;A(2,0)=2;A(2,1)=2;A(2,2)=0;A(3,0)=-3;A(3,1)=1;A(3,2)=5;////make dcovector y////CPPL::dcovector y(4);y(0)=8;y(1)=2;y(2)=0;y(3)=5;////solve Ax=y////A.dgels(y);////print////std::cout<<‘‘x=\n’’<<y<<std::endl;return0;}x=0.928934-0.924221.740034()4.1CPPLapackdgematrix.dgeevdgematrix.dggevdsymatrix.dsyevzgematrix.zgeevzgematrix.zggevzsymatrix.zsyev4.2doubleAA.dgeev(wr,wi);wr,wi doubledcovector vrr,vriA.dgeev(wr,wi,vrr,vri);drovector vlr,vliA.dgeev(wr,wi,vli,vri);dggev4.3A4.4A= 321200421//====================================================================[include]#include‘‘cpplapack.h’’//=======================================================================[main]/*!main*/int main(int argc,char**argv){////make dgematrix A////CPPL::dgematrix A(3,3);A(0,0)=3;A(0,1)=2;A(0,2)=1;A(1,0)=2;A(1,1)=0;A(1,2)=0;A(2,0)=4;A(2,1)=2;A(2,2)=1;////make wr wi vr////std::vector<double>wr,wi;std::vector<CPPL::dcovector>vrr,vri;////dgeev////A.dgeev(wr,wi,vrr,vri);////print////for(int i=0;i<3;i++){std::cout<<‘‘####‘‘<<i<<‘‘th eigen####’’<<std::endl;std::cout<<‘‘wr=’’<<wr[i]<<std::endl;std::cout<<‘‘wi=’’<<wi[i]<<std::endl;std::cout<<‘‘vrr=\n’’<<vrr[i]<<std::endl;std::cout<<‘‘vri=\n’’<<vri[i]<<std::endl;}}####0th eigen####wr=5wi=0vrr=0.6201740.2480690.744208vri=####1th eigen####wr=-1wi=0vrr=0.447214-0.8944271.23361e-16vri=####2th eigen####wr=1.36434e-16wi=0vrr=-5.22952e-17-0.4472140.894427vri=5()5.1CPPLapackdgematrix.dgesvdzgematrix.zgesvd5.2doubleA A M NA.dgesvd(S,U,VT);S dcovector U VT dgematrix5.3A5.4A=413 51−1220−315//====================================================================[include]#include‘‘cpplapack.h’’//=======================================================================[main]/*!main*/int main(int argc,char**argv){////make dgematrix A////CPPL::dgematrix A(4,3);A(0,0)=4;A(0,1)=1;A(0,2)=3;A(1,0)=5;A(1,1)=1;A(1,2)=-1;A(2,0)=2;A(2,1)=2;A(2,2)=0;A(3,0)=-3;A(3,1)=1;A(3,2)=5;////make S,U and VT////CPPL::dcovector S;CPPL::dgematrix U,VT;////SVD A////A.dgesvd(S,U,VT);////print S,U,and VT////std::cout<<‘‘S=\n’’<<S<<std::endl;std::cout<<‘‘U=\n’’<<U<<std::endl;std::cout<<‘‘VT=\n’’<<VT<<std::endl;return0;}S=7.613055.945521.64083U=-0.404476-0.6724230.445651-0.430862-0.678796-0.0902972-0.04937610.727079-0.287353-0.181365-0.872916-0.3500750.541353-0.711899-0.1922890.403933VT=-0.947144-0.1466730.285317-0.230125-0.309031-0.9227910.22352-0.9396740.2589446()6.1CPPLapack6.2m(x 1,y 1)(x n ,y n )m 1x 1x 21···x n 11x 2x 22···x n 2............1x m x 2m ···x n nk 0k 1...k n=y 1y 2...y mAx=yk 0k n6.34(0,-4.04),(1,-1.98),(2,2.02),(3,13.86)3//====================================================================[include]#include‘‘cpplapack.h’’//======================================================================[solve]void solve(int N,CPPL::dcovector&x,CPPL::dcovector&y){////make dgematrix A////CPPL::dgematrix A(x.l,N+1);for(int i=0;i<A.m;i++){for(int j=0;j<A.n;j++){A(i,j)=std::pow(x(i),(double)j);}}////solve Ak=y////A.dgels(y);}//=======================================================================[main]/*!main*/int main(int argc,char**argv){////make dcovector x,y////CPPL::dcovector x(4),y(4);x(0)=0;y(0)=-4.04;x(1)=1;y(1)=-1.98;x(2)=2;y(2)=2.02;x(3)=3;y(3)=13.86;////solve////solve(3,x,y);////print////for(int i=0;i<3;i++){std::cout<<‘‘k’’<<i<<‘‘=’’<<y(i)<<std::endl;}return0;}k0=-4.04k1=3.05667k2=-1.987() 7.17.2X k=N−1n=0x n e−j2πknNW0W0W0···W0W0W1W2···W nW0W2W4 (2)............W0W N−1W(N−1)2···W(N−1)nx0x1x2...x n=X0X1X2...X N−1Ax=y n7.3data.txt10dft.txt//====================================================================[include]#include‘‘cpplapack.h’’//========================================================================[DFT]void DFT(CPPL::zcovector&X,int n){////make zgematrix A////CPPL::zgematrix A(X.l,n+1);for(int i=0;i<A.m;i++){for(int j=0;j<A.n;j++){A(i,j)=std::complex<double>(std::cos((i*j)*2*MPI/(X.l)),-std::sin((i*j)*2*MPI/(X.l)));}}////solve Ax=X////A.zgels(X);}//=======================================================================[main]/*!main*/int main(int argc,char**argv){////make zcovector X////CPPL::zcovector X;X.read(‘‘data.txt’’);////solve////DFT(X,10);////write////X.write(‘‘dft.txt’’);return0;}data.txtzcovector100(1,3.97901e-10)(0.998027,-0.0627905)(0.992115,-0.125333)(0.982287,-0.187381)(0.968583,-0.24869)(0.951057,-0.309017)(0.929776,-0.368125)(0.904827,-0.425779)(0.876307,-0.481754)(0.844328,-0.535827)...dft.txtzcovector11(2.07977e-07,6.53992e-09)(1,-6.4705e-07)(-2.07977e-07,6.54019e-09)(-1.03885e-07,6.54021e-09)(-6.91412e-08,6.5401e-09)(-2.80132e-08,6.53977e-09)(-4.12676e-08,6.54009e-09)(-3.42625e-08,6.54017e-09)(-2.92385e-08,6.54009e-09)(-3.86341e-08,6.53992e-09)(-2.24983e-08,6.54008e-09)]8()8.18.21d2φ∆x2=ρj φ1=0φN=0−211−21···1−21···1−211−2φ2φ3...φj...φN−2φN−1=∆x2ρ2ρ3...ρj...ρN−2ρN−1Ax=yφ8.3d2φ//====================================================================[include]#include‘‘cpplapack.h’’//=======================================================================[main]/*!main*/int main(int argc,char**argv){////declare objects////const int N(201);const double dx(1/(double)(N-1));const double k(2*MPI);CPPL::dgbmatrix A(N-2,N-2,1,1);CPPL::dcovector rho(N-2);////make dgbmatrix A////A.identity();A*=-2;for(int i=0;i<A.n-1;i++){A(i,i+1)=1;A(i+1,i)=1;}////make dcovector rho////for(int i=0;i<rho.l;i++){rho(i)=-k*k*sin((i+1)*k*dx);}rho*=dx*dx;////solve A*phi=dx^2*rho////A.dgbsv(rho);////print////std::cout<<‘‘x phi(x)Ans’’<<std::endl;std::cout<<‘‘000’’<<std::endl;for(int i=0;i<rho.l;i++){std::cout<<(i+1)*dx<<‘‘‘‘<<rho(i)<<‘‘‘‘<<sin((i+1)*k*dx)<<std::endl;}std::cout<<‘‘100’’<<std::endl;}x phi(x)0000.0050.03141330.03141080.010.06279570.06279050.0150.09411610.09410830.020.1253440.1253330.0250.1564470.1564340.030.1873970.1873810.0350.2181610.2181430.040.248710.248690.0450.2790140.2789910.050.3090420.3090170.0550.3387660.3387380.060.3681550.3681240.0650.3971810.3971480.070.4258140.4257790.0750.4540280.453990.080.4817930.4817540.0850.5090830.5090410.090.5358710.5358270.0950.562130.5620830.10.5878340.5877850.1050.6129570.6129070.110.6374760.6374240.1150.6613660.6613120.120.6846030.684547...9()9.1(PointJacobi)9.2n n n+11φn+1 j =1201101···101···10110φn2φn3...φn j...φn N−2φn N−1−∆x2ρ2ρ3...ρj...ρN−2ρN−1φ0 φn+1−φn ≤ φ9.3section8//====================================================================[include]#include‘‘cpplapack.h’’//=======================================================================[main]/*!main*/int main(int argc,char**argv){////declare objects////const int N(201);const double dx(1/(double)(N-1));const double pai(3.141592);const double k(2*pai);const double eps(1.0e-6);CPPL::dgbmatrix A(N-2,N-2,1,1);CPPL::dcovector rho(N-2);CPPL::dcovector phi(N-2),phi_old(N-2);////make dgbmatrix A////A.zero();for(int i=0;i<A.n-1;i++){A(i,i+1)=1;A(i+1,i)=1;}////make dcovector rho////for(int i=0;i<rho.l;i++){rho(i)=-k*k*sin((i+1)*k*dx);}rho*=dx*dx;////solve////do{phi_old=phi;phi=A*phi_old-rho;phi*=0.5;}while(nrm2(phi-phi_old)>eps);////print////std::cout<<‘‘x phi(x)’’<<std::endl;std::cout<<‘‘000’’<<std::endl;for(int i=0;i<rho.l;i++){std::cout<<(i+1)*dx<<‘‘‘‘<<phi(i)<<‘‘‘‘<<sin((i+1)*k*dx)<<std::endl;}std::cout<<‘‘100’’<<std::endl;}x phi(x)0000.0050.0314070.03141080.010.0627830.06279050.0150.0940970.09410830.020.1253180.1253330.0250.1564160.1564340.030.1873590.1873810.0350.2181170.2181430.040.248660.248690.0450.2789580.2789910.050.308980.3090170.0550.3386970.3387380.060.368080.3681240.0650.39710.3971480.070.4257280.4257790.0750.4539360.453990.080.4816960.4817540.0850.508980.5090410.090.5357620.5358270.0950.5620160.5620830.10.5877150.5877850.1050.6128330.6129070.110.6373470.6374240.1150.6612320.6613120.120.6844650.684547...。
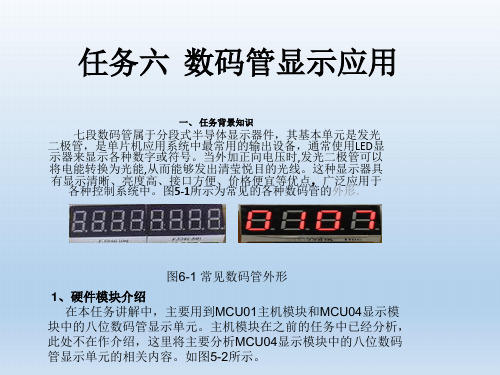
单片机控制装置与调试任务六 数码管显示应用
该数组共有5个元素,每个元素由不同的下标表示,分别为buffer[0],buffer[1],buffer[2],buffer[3]和buffer[4]。
为了稳定发光,再延时一段时间,之后加人熄灭数码管进行消隐,主要防止显示有拖尾现象。
{ cs1=0;cs2=1;
//选中段码锁存IC
for(i=0;i<9;i++)
效,然后送数据,先送段选,然后再送位选,最后CP脉冲高电平使的
数据输出。
2.动态扫描的基本流程 以从高位到低位扫描显示为例, 动态扫描的基本流
程是: (1)送段码
①送最高位的段码到总线。
②拉低cs1,置位cs2。 ③用wr线发送锁存脉冲。 (2)送位码 ①送第七个通道(Q8)位选数据到总线。 ②拉低cs2,置位cs1。 ③同样用wr线发送锁存脉冲。第七个通道(Q8)导通, 第一位数码管点亮。
/例* 8如位,数一码个管3从位左数到字右变依量次tem显p示要“D在n0高L,阻ED1态,七2段,数3码,管4,显×↑,示5其,“6,百7、”十八HH、个个数”字各的个C语位××言上程的序数字*/ 。无无输输出出
port=tab[disbuf[i]];wr=1;wr=0;
//送段码,锁存数据
图5-1所示为常见的各种数码管的外形。
{ while(1)
//while循环
disbuf[1]=tab[1];
//分别为"0、1、2、3、4、5、6、7"
(2) 定义共阳极字形编码表(数字0~9)
在建立数组的时候,注意字型码的排列次序,段码对表头的偏移位置就是该数值的段码,这种排列方法很便于显示数据
因此可将LED各段码与数据位建立如表4-1所示的对应关系。
2024年施工员考试题库及参考答案【实用】
2024年施工员考试题库第一部分单选题(500题)1、项目成本核算的核心任务是项目的()。
A.组织协调B.目标控制C.合同管理D.风险管理【答案】:B2、施工过程中,隐蔽工程在隐蔽前应通知()进行验收,并形成验收文件。
A.建设单位B.施工单位C.质检单位D.监理工程师【答案】:A3、工会依法对安全生产工作进行()。
()A.执行B.实施C.管理D.监督【答案】:D4、()每秒所变化的()称为角频率。
A.交流电、角度B.直流电、角度C.交流电、次数D.直流电、次数【答案】:A5、建设法规是指国家立法机关或其授权的行政机关制定的旨在调整国家及其有关机构、企事业单位、()之间,在建设活动中或建设行政管理活动中发生的各种社会关系的法律、法规的统称。
A.社区B.市民C.社会团体、公民D.地方社团【答案】:C6、安全立网面应与水平面垂直,并与作业边缘最大间缝不超过()。
A.5cmB.10cmC.15cmD.20cm【答案】:B7、基坑开挖中,施工降水和排水一般分为明排水和()降水。
A.人工抽水B.人工井点C.人工截水D.人工排污【答案】:B8、管道与设备的连接应在设备安装完毕后进行,与风管、制冷机组的连接须()。
A.采取刚性连接B.采取柔性连接C.强行对口连接D.置于套管内连接【答案】:B9、参数EA反映了杆件抵抗()变形能力。
A.扭曲B.弯曲C.剪切D.拉伸(压缩)【答案】:D10、应选用安全电压照明灯具,单相照明每一回路,灯具和插座数量不宜超过(25)个,并装设熔断电流()的熔断器保护。
A.2015A及15A以下B.2510A及10A以下C.3015A及15A以下D.2515A及15A以下【答案】:D11、防火分区隔墙两侧的防火阀距墙体表面不应大于()。
A.200mmB.300mmC.400mmD.500mm【答案】:A12、电气交接试验的目的是判定工程是否符合要求,是否()A.满足设计要求B.符合制造标准C.达到山力要求D.可以投入运行【答案】:D13、大体积混凝土浇筑体里表温差、降温速率及环境潟麼乃沮磨府弯的测试,在混凝土浇筑后l一4天,每()不应少于1次。
吹灰系统讲义

吹灰系统讲义一、吹灰的目的:就是保证锅炉受热面清洁,降低排烟热损失,防止炉内结焦、防止受热面管壁金属超温,提高传热及锅炉效率。
二、吹灰系统介绍:1、吹灰枪:二期#5、#6炉每台总共有126只吹灰器:其中炉膛装有76只短吹,分五层(后墙四层),折焰角处4只长吹,水平烟道处16只长吹,尾部烟道布置28只长吹(其中省煤器六只),空预器2只。
2、减温减压站:吹灰汽源来自主蒸汽系统二级减温器后管道(#5机吹灰汽源来自壁再入口)经减温、减压站减压至1.47 1.96MPa送至吹灰汽源管道。
开机时空预器吹灰由辅汽接带。
3、自动疏水阀:吹灰开始时主汽阀开启,处于末端的疏水阀自动开启,蒸汽对管道进行加热,冷凝水排出。
当达到一定温度时,疏水阀自动关闭。
4、吹灰控制系统:#5机吹灰控制系统在集空室内,#5马达中心设吹灰器动力柜(4台)。
#6机吹灰系统控制由武汉锅炉自控设备公司设计,吹灰程控采用集中布置方式,吹灰器主回路控制元件安装在吹灰器动力柜中(4台),二次回路控制元件安装在程控柜中。
程控采用可编程控制器做主控机,操作元件、指示元件及模拟盘布置在程控柜上(2台);可编程序控制器采用日本KOYO公司SU-6型,模块式结构,输入176点,输出176点,用户存储器8K,模拟显示屏、吹灰器运行状态显示及故障点显示;在控制盘可进行现场手动——自动——盘面手动切换等功能。
三、吹灰器工作过程:二期吹灰器工作过程:电源接通,吹灰枪向前移动,当吹灰枪进入炉膛一定距离后,跑车上的撞销拨动摆动块,吹灰器阀门开启,吹灰开始。
跑车继续将吹灰枪送入炉膛,行程开关达到极限位置时,电机反转,跑车带动吹灰枪后退。
退至撞销重新拨动摆动块时阀门关闭,吹灰停止。
吹灰器完成了一个吹灰过程。
吹灰枪吹灰时,一边前进(或后退),一边转动,作螺旋运动。
喷头上的两只喷嘴沿螺旋线轨迹,将两股射流向受热面,达到清吹积灰和结渣的目的。
四、着重介绍#6炉吹灰控制系统:1、吹灰系统1)、主汽阀:设置在吹灰管路的最前端,吹灰器投运时打开,吹扫完毕后关闭,本次改造中将原MCC#2柜的GT -0123电动主汽阀的控制移位到吹灰程控#3柜进行控制,使吹灰系统电动一、二次门由控制系统来控制。
泸型大曲黑曲霉产酸性蛋白酶条件的优化及其酶学性质的研究

a i r ta e r a h d t 4 5 U g .wh c s i c e s d b .% a e p i z d T e e z ma i p o e i s wa lo c d p oe s e c e o 2 3 0 / i h wa n r a e y 6 6 4 t f ro t mie . h n y t rp r e s a s c t s d e .h n y ce p i l t 5 , H3 5, n ssa l eo 0 . , , a F i c e s d t e a t i o t i dT e e z me a t d o t u mal a % p . a d wa t b e b lw 5 % Cu K C , e n r a e h c i t t y 5 vy s me e tn h n c n e t t n i 2 o xe tw e o c n r i s mmo /L, i h c ii f a i r ta e wa e r a e f r a d n e , e , ao L whl t e a t t o cd p oe s s d c e s d a t d i g F “ F “ e vy e
w e epoot no w et rna dsy enmel a : cr o r . g )N 41 .%( g w t odn aai h nt rpro f h a ba n b a a w s6 , onf u 0 / , H C 5 g ) a r ligcpct h i o 4 l 1 %( g 2 /, e h y
主要施工设备表
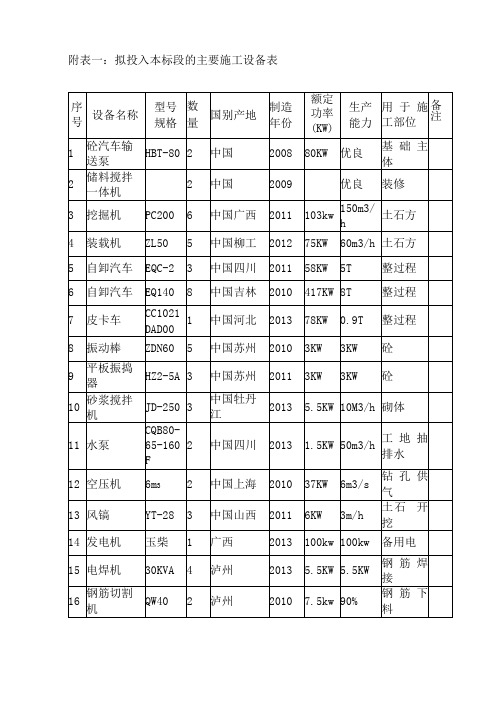
附表一:拟投入本标段的主要施工设备表附表二:拟配备本标段的试验和检测仪器设备表附表三:劳动力计划表单位:人施工进度横道图标识号 ■ :任华名称工期 开蛤时间 完成讨回 :前置任务开工 0 d 2015/12/1 2015/12/1 二Qi 六年1二口一七年 二口-“八, 二口11 12:] : : '3 ; .7 ;S :7 lS'-A 1C^ i J2h L :z ' t :5 c '7 S 9 l ;L2 1 S :5;l :Si9h<KL ]:.2 1 \2\ % ■ !;■I2.施工准备31 d 2016/12/1. 2015/12/31 1 土石方工程 30 d2016/1/12016/1/302[…、…1 - 111:基岫缸250 d 2016/1/312016/10/65 基础开花 120 (1 2016/1/31 2016/5/29 31 1 ■i6垫层浇筑60(12016/4/302016/6/28 5FS-30 d7 1 ; 防水施工 45 ;1 2016/6/29 2016/8/12.6 -- --- —— ---------------- ------- : --------- -- --------------- 1钢筋制安及世浇筑 90 d 2016/7/9 2016/10/6 7FS-35 d9 主体结构施工446 d 2016/10/72017/12/26■■魔■ ----- 口10地下室结构 180 :12016/10/72017/4/4 8三=11地下室回填14G d 2016/12/2 2017/4/20 WFS-124 d____________ _______ ; ____________ ; _____________ _______________ J 1麻I12 j地上主体结构 350 d 2017/1/11 2017/12/2611FS-100 d中 ・T13 ; 二次结构陶工 220(1 2017/6/30 2018/2/4.12FS-1BC d*14装饰装修施工 358 d 2017/10/8 2018/9/30r r,r15 ;抹灰施工200 d 2017/10/S 2018/4/2513FS-1.20 d : ■,i ,i,i ,i16:门窗安装100 d 2017/12/27 2018/4/5h"FS-120 dX17屋面、保温防水工程 100 d 2018/3/152018/6/2216FS-22 d"1 1 ji 1L8楼地面工程120 (1 2018/6/3 2018/9/3017FS-20 d1S安虹程 61g d 2017/1/112018/9/21■y就 给排水工程619 d201.7/1/11201S/9/21 12SS----- 1 ---------------------------------------- !<-------- b -------------------- 1 --------------------- 1 --------------------- J21 电气工程 619 d 2017/1/11 2018/9/21 12SS___________________________ I ______ E ________ , __ E ___________ _ | _______________22 通风工程 619 d 2017/1/11 2018/9/21 12SS 23 收尾、移交61 d2018/10/12018/11/3018,20,21,22724竣工0 d 2018/11/302018/11/3023项目.大盘水大河经济开发区落飞嘤安置小区项目任^美辑任务里程碑 专情要 学2。
spot6产品介绍及数据处理流程

1.5m
6m
Pansharpening 3 bands (Pseudo)
编码
SPOT 6 和 SPOT 7 数据编码均为12bits –4 4,096 096 级 交付可选 12bits (16-bit Geotiff 格式) 或 8bits
编码为16bits (65,536 级) 保留了源数据的初始动态范围 8bits编码将动态范围从 4,096级降至 256。辐射分辨率的降低
检查已经校正好的全色以及多光谱影像,精度满足
要求后进行融合
融合一般使用Pansharpeni分布 两个星座的地面轨道几乎重叠
仪器
生产选项
处理级别 级别
初级
影像经过辐射校正及基本几何校正,尽可能重建独特理想状态
下推扫式探测器获取的影像。
正射级
影像经过正射纠正,达到制图所需要的精确地图投影。影像可
与其它形式的地理信息结合 (矢量,栅格地图及其它卫星影像)
3 设置模型参数 3.设置模型参数
选择相应的投影参数,要与参考影像的投影一致 选择相应的投影参数,要与参考影像的投影 致
4.设置参考信息
以参考图像作为控制资料时,选择Image 以参考图像作为控制资料时 选择Image Layer;只有参考控制点 数据时,选择Keyboard only键盘输入。
SPOT6的总体概述
SPOT 7
发射日期 发射地点 发射器
不晚于2014年1月 待定 待定
SPOT 6
发射日期 发射地点 发射器
2012年9月9日 Sriharikota (印度) PSLV 确保连续提供服务直至2024年
SPOT 6 | SPOT 7 与 SPOT 5
DS6-K5B计算机联锁系统详细介绍

系统组成
控制台
MMIF DC24V MMIF Ⅰ系 电源 Ⅱ系
A AC220V
B
鼠标
显示器
语音 CTC接口
远程监测
控制台转换箱
键盘 鼠标
打印机
显示器
控显A机
INIO
控显B机
INIO
监测机
INIO
模拟量 采集接口
人机接口 FSD486(或FSIO)
联锁机
人机接口 FSD486(或FSIO)
控显机采用PC总线工控机。机箱内安装2块带有光电转 换的串行通信接口卡INIO,用于与联锁通信。
控显机采用双机互为热备。在热备方式下,控显双机同 时加电运行,同时接收联锁机发送的信息,但只有工作机向 表示设备发送表示信息和接收控制台的按钮操作信息。为了 实现每一台控显机都能够与联锁机的每一系单独通信,构成 交叉互备的冗余关系。控显双机每一台内安装了两块INIO通 信卡。分别用于同联锁机1系和2系通信。
DC24V-
DC24V+
DC24V 电源
AC220V
DS6-K5B计算机联锁系 统由五个部分组成:
☻ 联锁机 ☻ 电子终端 ☻ 控制台 ☻ 电务维护台 ☻ 电源系统
北京全路通信信号研究设计院研制
系统结构图
显示器
操作台
控
语音
监
制 台
CTC分机
测
接远程监视系统
子
子
电务维护台
系
系
统
统
控制器转换箱
RS422
DID板
DID板是一块集成通信板。
北京全路通信信号研究设计院研制
FIO7[P]板
FIO7-[P]板是联锁机 与 ET 机 架 、 控 显 机 、 监 测机之间通信的光电信 号变换接口板,如图9所 示。FIO7-[P]板上有3组 ET线路的光缆接口,2组 计算机的光缆接口。
博士能260501 双筒数码夜视仪
博士能260501 双筒数码夜视仪博士能(Bushnell)已超过50年,在高性能运动光学行业的佼佼者。
指导原则是提供最优质,最可靠和负担得起的运动光学市场上的产品。
此外,博士能的承诺出色的客户服务和强大的零售商建立伙伴关系是无与伦比的。
博士能拥有领先的体育光学类别的所有市场份额,而我们的产品一直从设计和性能赢得声望的组织奖。
我们的产品线从提高每一个观众的户外运动的追求,自然学习,狩猎,捕鱼和观鸟,以观星的乐趣。
室内,双筒望远镜使观众更接近,在快速移动的剧院和音乐会在体育或美术行动。
博士能不断探索新兴技术,以市场运动光学相结合的创新优势领先的性能设计。
这正是使博士能最知名和世界知名运动光学品牌奉献。
博士能主要生产望远镜(Binoculars)、瞄准镜(Scopes)、测距仪(Rangefinders)、夜视仪全球定位系统(GPS)和雷尔相机(Trail Cameras)。
博士能具有丰富的产品线,在各项产品上,都其更有优势,在夜视仪领域,夜视仪的产品虽少,但是夜视仪在博士能产品里面,也起到了一定的位置。
博士能夜视仪的最主要的产品线有:博士能双筒夜视仪:260401博士能数码夜视仪:260650、260542、260105博士能双筒数码夜视仪:260501博士能夜视仪是博士能的另一分支,是按照功能用途分类的一种一类夜视仪,尤其是数码夜视仪,博士能的数码夜视仪在全球排第二的位置,居奥尔法数码夜视仪之下。
一、数码夜视仪的简介a.数码夜视仪是具有视频输出功能的红外夜视仪,可以外接其他辅助设备进行拍照录像或者本身可以拍照或者录像。
b.广泛应用于公安,军队,巡逻队或者小区保安以及场地看守等使用。
c.它的突出特点是广泛是黑白成像(部分也有黑白或者其他成像兼容的),清晰度和分辨率高;拍照或录像的功能可以记录夜间的活动,便于回放和取证;电源类型多样,待机时间更久,数码夜视仪一般使用5号多节电池,及CR2-3V的锂电池,这样可以有效的保障夜间的使用时间,部分夜视仪也可以外接直流电源或者是车载电源;数码夜视仪红外多数都可以调节,以适应不同环境下的使用,隐蔽性比普通夜视仪更好一些。
压力管道试压、吹扫方案汇总
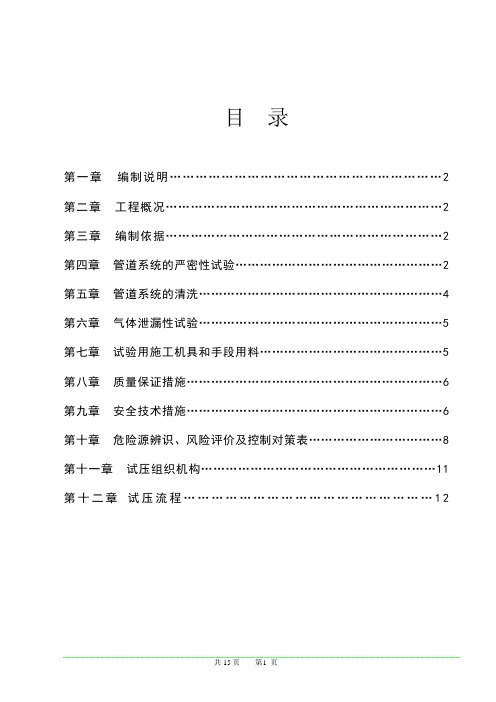
目录第一章编制说明 (2)第二章工程概况 (2)第三章编制依据 (2)第四章管道系统的严密性试验 (2)第五章管道系统的清洗 (4)第六章气体泄漏性试验 (5)第七章试验用施工机具和手段用料 (5)第八章质量保证措施 (6)第九章安全技术措施 (6)第十章危险源辨识、风险评价及控制对策表 (8)第十一章试压组织机构 (11)第十二章试压流程 (12)第一章编制说明本方案适用于山西聚源煤化工程有限公司焦炉煤气制天然气项目脱萘、甲烷化反应、合成气分离与压缩、干法净化系统改造、全厂外管、厂外外管管道试压、吹扫工作。
第二章工程概况:2.1工程简介:各工段共有各类管道5398米,介质有焦炉气;再生气;蒸汽;放空气;排液;氮气;生产废水;化学污水;循环水;锅炉给水;二氧化碳;冷凝水;氢气;仪表空气;天然气等。
2.2试验流程划分原则:本装置工艺试压分26个试压包,其中第3、26试压包试验介质采用压缩空气,其它试压包试验介质采用洁净水。
2.3管道试验分为三个阶段:第一阶段强度及严密性试验,第二阶段吹扫/冲洗,第三阶段泄漏性试验。
2.4试压的重点部位:2.4.1易燃、易爆、有毒、有腐蚀等介质系统。
第三章编制依据3.1西北化工研究院设计所设计的管道布置图、工艺流程图、相关设计说明、设计变更、设备有关技术资料。
3.2本工程所审批的工艺管道施工方案3.3 《工业金属管道工程施工规范及条文说明》GB50235-2010第四章管道系统的强度试验及严密性试验4.1各类管道安装完毕后,应按设计规定对管道系统进行强度试验及严密性试验,以检查管道系统及各连接部位(焊缝、法兰接口等)的工程质量。
4.2管道系统进行强度试验及严密性试验前应做到:(1)管道系统安装完毕,并符合设计要求及规范的有关规定;(2)支吊架安装工作完毕,经核算需要增加的临时支吊架及加固已安装完毕;(3)结束焊接和热处理工作,并经无损检验合格;(4)试验用压力表经检验、校准正确;(5)具有完善的试验技术、安全和组织措施并经审查合格,并进行技术交底;(6)对于蒸汽管道,在水压试验前,应将支吊架锁定或垫牢固定好,以免因水重造成支吊架超载,影响支吊架受损或变形。
六年级上册英语课件-Lesson 6 来找你的朋友吧 科普版(共14张PPT)

课堂小结 Where is the reading room? Is it on the third floor? 阅读室在哪里?在三楼吗? It’s on the fifth floor. 它在五楼。 Wednesday is the third day of the week. 星期三是一周的第三天。 A is the first letter in the alphabet. A是字母表中的第一个字母。
W3)eSdanedsydiasy__is_t_h_e_tthoirtdhedaleyfot fotfhCeawtheye. k.
Athies ltahbe, fiorustrtlehtter in the alphabet.
ITth’esboirnd tisheonfiftthhef_lo_o__r.__ step.
SIth’e’s osninthCelafsifsthThflroeoer..
HA是i, e字ve母ryo表n中e! 的Let第’一s f个in字d y母ou。r friend together!
tWhehalatbc,lafsosuirsthshe in?
2W)hJoehreniiss_th_e__re_a_dtiongthreoorimgh?tIos fitHoenletnh.e third floor?
知识讲解
Where is Kate?
I think she’s in the reading room.
知识讲解
Is Kate in the reading room?
No, she's in her classroom.
知识讲解
H星i,期ev三er是yo一ne周! L的et’第s三fi天nd。your friend together!
SPOT6卫星影像详细介绍
SPOT6卫星影像详细介绍北京揽宇方圆信息技术有限公司销售全球SPOT6卫星数据,提供SPOT6卫星数据处理技术支持!2012年9月9日,SPOT6卫星由印度火箭PSLV-C21搭载,成功发射。
9月22日,SPOT6顺利进入695公里高的轨道,与2011年发射的Pleiades 1A卫星在同一轨道平面上,2013年1月以后正式商业运行。
SPOT7卫星2014年发射,SPOT-6和SPOT-7卫星将替换2002年发射的SPOT-5卫星。
SPOT-6和SPOT-7卫星在低地球轨道内,距离180°位置运行。
卫星可以辨认直径1.5米的黑白物体,直径6米的彩色物体。
图像刈幅60公里,与此前的“SPOT卫星一样,只是将更加敏捷。
两颗卫星底部的成像器能够来回俯仰45°,以捕捉卫星前后区域;左右摆动最大角度35°。
SPOT6卫星参数SPOT6卫星特点※保留60公里大幅宽,卫星星座每日接收6百万平方公里影像※覆盖60公里*600公里的范围,正南北定向影像,易于处理※灵活的编程接收,集成自动天气预报,提高接收成功率SPOT6卫星类型※捆绑: 全色(1.5米) 和多光谱(6 米)※融合产品: 具有3或4个波段的1.5米彩色影像※格式:DIMAP V2 格式(JPEG 2000或GeoTIFF)SPOT6卫星应用☆生态环境SPOT6在小流域水土保持生态建设遥感监测中的应用☆地质矿产SPOT6遥感图像数据在矿山地质环境调查中的应用☆农业林业基于SPOT6表观反射率的城市森林叶面积指数估测SPOT6数据在退耕还林监测中的应用☆影像制图☆环保与灾害监测SPOT6卫星图像在采煤沉陷区及边界圈定中的应用☆水利、电力工程建设应用SPOT6卫星样图。
ubbpd6技术手册
ubbpd6技术手册UBBPD6是一款高性能、可靠稳定的技术产品,具有广泛的应用领域,本技术手册将为您详细介绍UBBPD6的技术特点、操作指南以及应用案例,以帮助您更好地了解和使用这一产品。
1. 技术特点UBBPD6采用先进的XXX技术,具有以下突出的技术特点:1.1 高性能:UBBPD6采用先进的处理器和算法,具有强大的计算能力和并行处理能力,可以快速、高效地完成各种复杂任务。
1.2 可靠稳定:UBBPD6具有精确的故障诊断和自我修复机制,能够快速切换至备份系统,确保系统的稳定运行。
同时,UBBPD6还采用了可靠的数据传输协议,保证数据的安全可靠性。
1.3 高扩展性:UBBPD6支持灵活的系统扩展,可以根据用户需求进行定制化配置,满足不同应用场景的需求。
2. 操作指南2.1 安装配置:在安装UBBPD6之前,请仔细阅读安装手册,并准备好必要的设备和工具。
安装UBBPD6时,请确保设备通电后再连接各个部件,并按照说明书的指导逐步进行操作。
2.2 开机操作:当UBBPD6安装好之后,接通电源,将其与电源适配器连接。
随后,按下电源按钮,待系统启动后,按照提示进行初始化操作。
2.3 系统设置:UBBPD6系统设置功能丰富,您可以根据需要进行参数配置、网络设置、备份设置等操作。
请参考系统设置手册,按照步骤进行相应的设置,以确保UBBPD6能够正常工作。
3. 应用案例3.1 移动通信领域:UBBPD6在移动通信领域有着广泛的应用。
它可以实现基站之间的数据传输和交互,提高通信网络的可靠性和稳定性。
同时,UBBPD6在移动通信领域还可用于故障诊断和网络优化等方面,帮助运营商提高网络性能和用户体验。
3.2 工业自动化领域:UBBPD6可应用于工业自动化领域,实现工业设备的远程监控和控制。
通过与传感器和执行器等设备的连接,UBBPD6可以实时获取工艺参数,进行数据分析和处理,提高工业生产的自动化水平和生产效率。
3.3 电力系统领域:电力系统对可靠性和稳定性有着极高的要求,UBBPD6可以在电力系统领域中发挥重要作用。
基层医院如何提高实习生教学质量
prc my J . e nUo O cl2 0 ,9( ) I4 12 het [ ] Smi rl no。0 11 2 : J.2 . o [ ] P rs J Y n If m n , .Ln - r lw u t pm 9 o i A 。 a a d a e a og em f l p f ra a - t Y。 t l J t1 t oo ae l
s p d a np r t y J . Uo, 0 ,6 ( ) l 5 一 2 2 e i r i l ehe o [ ]J r 2 2 1 6 : 2 7 l 6 . ocac cm l0 7 ( 收稿 日期 : 0 -5 8 2 60 - ) 0 0
【 Zs a P nukA , el gu S e a. a a cp a i 1 e 8] i nA,atc JB l ernA ,t 1L pmsoi rdc . m d c an
m : i lae pr J、 r , 9 , 6 1 : 822 yit s r o [] J o 1 11 ( )2 - . ni c t a e U l9 4 7 8 [ ] M t e D,l e , a hV e a L pr cp d a n het 2 ah s E p t M R l ,t . a a s i r i e r o t s h p 1 oo cac p c- l
m [ ] J no r oy20 , ( )8 9 5 . yJ . Edu l , 0 1 3 :  ̄ 5 og 0 4 4 [ ] G u D . ao p pr i tPr no 0y U f e ei 3 ar D Lps i oe ter r e t e9 p :S o anwdv e c c a v ei i 0 c e c
检验科全自动生化仪演示文稿-济源第二人民医院
美国贝克曼(Beckman)UniCel DxC 600 Synchron 全自动生化分析系 统 效率
• 离子选择性电极(ISE):成熟的、性能卓越
的ISE技术,具备5个电解质项目(包括:钾、 钠、氯、钙及二氧化碳)测试功能;糖氧化 电极:使快速完成血糖测试成为可能 。 • 可选配“近红外粒子免疫测定(NIPIA)”: 可以扩充项目菜单,包括hs-CRP、铁蛋白 等 。
•
美国贝克曼(Beckman)UniCel DxC 600 Synchron 全自动生化分析 系统 效率
• 系统分析平台的可扩展性;众多项目同时
分析的多功能性;不同专业平台的可合并 性;分析前、分析中和分析后过程的可整 合性。保证了更短、更一致的出报告时间, 单位测试结果更低的成本,充分体现了贝 克曼库尔特“流程先锋”的理念。 • 条码管理:标配样本及试剂条码阅读器, 减少劳力和差错 。
美国贝克曼(Beckman)UniCel DxC 600 Synchron 全自动生化分析 系统 效率
• 急诊功能:行业领先的急诊功能,42秒完
成6个急诊项目。 • 可“系统扩展”:单一界面,多平台的解 决方案,以满足临床实验室不断发展的需 要。 • 可选配“自动分样功能”:将生化和免疫 平台合并,而无“交叉污染”及“堵车现 象” 。
美国贝克曼(Beckman)UniCel DxC 600 Synchron 全自动生化分析 系统 基本性能
• 最大测试速度 :990测试/小时 • 同时测试项目 :65项 • 样本容量 :96个,可连续进样 • 测试糖氧化电极法、酶免疫法、近红外免疫粒 子测定法 • 测试项目菜单 :>200项(>100项预编程; 100项用户自定义)
美国贝克曼(Beckman)UniCel DxC 600 Synchron 全自动生化分析 系统
DGETRF, M=N

100 Subroutine 11 DGEMV( 'N', ... DGEMM( 'N', 'N', ... 17 7 DGETRF, M=N y 5 DGETRI 5 DPOTRF( 'U', ... 5 DPOTRF( 'L', ... 4 DPOTRI( 'U', ... 4 DPOTRI( 'L', ... 4 DSYTRF( 'U', ... 4 DSYTRF( 'L', ... 6 DGEQRF, M=N 7 DGEHRD 6 DSYTRD y{ times reported for DLUBR
Table 18: Speed in mega ops, FPS Model 500, 1 processor Optimized BLAS from FPS Computing
15
Values of N 100 200 300 400 500 Subroutine 29 29 32 30 33 DGEMV( 'N', ... DGEMM( 'N', 'N', ... 67 70 70 71 72 22 33 39 44 47 DGETRF, M=N 44 56 63 64 66 DGETRI 34 54 65 65 67 DPOTRF( 'U', ... 34 54 56 61 65 DPOTRF( 'L', ... 34 45 58 59 63 DPOTRI( 'U', ... 34 54 62 63 65 DPOTRI( 'L', ... 17 22 27 34 34 DSYTRF( 'U', ... 17 27 29 36 36 DSYTRF( 'L', ... 27 43 45 49 53 DGEQRF, M=N DORGQR, M=N=K 27 41 46 51 53 24 36 41 43 45 DGEHRD 27 28 29 29 30 DSYTRD( 'U', ... 27 28 28 29 30 DSYTRD( 'L', ... 22 24 27 30 32 DGEBRD Table 15: Speed in mega ops, IBM RISC/6000-550
6系芯片组
6系芯片组6系芯片组是指搭载了第六代英特尔酷睿处理器的芯片组,主要用于个人电脑和移动设备。
该芯片组具有强大的性能、高效的能效和先进的图形处理能力,可以满足用户对高性能和多任务处理的需求。
以下是有关6系芯片组的详细介绍。
酷睿处理器是英特尔公司推出的一系列高性能处理器,采用了14纳米工艺以及各种先进的技术,如超线程技术和动态加速技术。
这些技术使得酷睿处理器可以在单核心和多核心应用程序中提供出色的性能表现。
6系芯片组与酷睿处理器搭配使用,可以充分发挥处理器的性能,实现高效的计算和处理能力。
6系芯片组的一个显著特点是其支持的最大内存容量。
它可以支持高达64GB的DDR4内存,这对于那些需要大量内存来运行复杂应用程序的用户来说是非常有吸引力的。
大容量的内存可以提高系统的响应速度和处理能力,使用户可以更好地处理多任务和运行大型应用程序。
此外,6系芯片组还具有强大的图形处理能力。
它支持内置图形处理器(IGP),能够提供流畅的高清视频播放和3D图形渲染。
对于那些从事设计、游戏或其他图形密集型任务的用户来说,这是一个非常重要的功能。
通过利用6系芯片组的图形处理能力,用户可以获得更好的图形性能和更好的视觉体验。
除了强大的性能和图形处理能力,6系芯片组还具有一些先进的功能。
例如,它支持USB 3.0和PCI Express 3.0接口,可以实现更快的数据传输速度。
此外,它还支持SATA 3.0接口,可以提供更快的硬盘数据传输速度。
这些功能使6系芯片组成为一个全面而功能齐全的解决方案,适用于各种应用场景。
总而言之,6系芯片组搭载了强大的酷睿处理器,具有高性能、高效能和先进的图形处理能力。
它支持大容量内存和一系列先进的接口,可以满足用户对高性能计算和多任务处理的需求。
对于那些需要处理大量数据、运行复杂应用程序或者进行图形密集型任务的用户来说,6系芯片组是一个非常有吸引力的选择。
它可以提供出色的性能表现和良好的用户体验,使用户能够更好地应对各种计算和处理任务。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
DSY6-IDV摄像摇臂
简介
DSY6-ⅠDV摄像摇臂是我公司根据市场需要,在参照国内外同类产品的基础上,自行研制开发的DV机用摄像设备。
产品投放市场后,深受广大用户的青睐。
DSY6-ⅠDV摄像摇臂是DV摄像机的专用设备。
它适用于各种MTV、电视剧、现场庆典、新闻专题等活动中的拍摄。
它会使您的画面更加流畅,视角更加独特。
DSY6-ⅠDV摄像摇臂是由移动车﹑三脚架﹑吊臂﹑控制机构等四部分组成。
摇臂全部采用高强度铝合金材料制成,外表采用皱纹塑处理。
可完成俯仰﹑旋转动作,对摄象机可进行方位﹑俯仰﹑变焦﹑聚焦、开机、录制等项控制。
该摇臂全长 5.5米,遥控部分元器件采用进口产品。
技术参数:
1.总长 5.5米
2.组合长度 5.5米、4.5米、
3.5米
3.最高机位 5.2米
4.支点高度 1.15米~1.70米
5.电源电池,220V/50Hz双重供电
6.工作时间 >8H
7.吊臂升角 -10度~45度
8.吊臂回转 >360度
9.摄像机俯仰 360度
10.摄像机方位 0~360
11.云台承重 8kg
12.适用机型
专业摄像机:SONY:DSR-250P DSR-PD150P DSR-PD190P DSR-PD100AP
DSR-PDX10P HDRFX1E HVR-Z1C
CANON:XL1 XL1S XM1 XM2
民用摄像机:SONY:所有带LANC接口的传统摄像机和数码摄像机
CANON:所有带LANC接口的传统摄像机和数码摄像机
配置清单:
1.摇臂 5.5米
2.三脚架 1套
3.运行车 1套
4.头部总成 1套
5.连接总线 6米
6.电机 2个
7.操纵手柄 1套
8.控制箱 1套
9.电池箱 1套
10.钢丝拉绳 3条
11.铝合金包装箱 1件
12.软包装 2件
13.配重 11片(100Pa)
14.监视器(6.4寸高亮度、选配件)
15.遥控系统说明书 1本
西安中元影视设备公司
2008.1.10。