一种基于URWPGSim2D启发式博弈策略设计
基于URWPGSim2D仿真新平台的花样游泳策略
基于URWPGSim2D仿真平台水中机器鱼搬运策略分析
31
Copyright©博看网 . All Rights Reserved.
MH=(H.X,H.Y,H.Z+deltaZ) 在 deltaZ<0时有类似的关系,此时球位于洞的上方,需将 虚拟的洞口设置在 H的下方,不过在实际测试中,球总是往 Z 轴正方向偏移的,此时依旧沿用上式可能会出现接近洞口时, 向下调整过度而使球直接偏洞而过,所以我们在这里设置一个 系数 k来对 deltaZ的值进行适当缩小,即:
MH=(H.X,H.Y,H.Z+kdeltaZ) 经过多次测试发现,当球与洞的横向距离 deltaX>=100时 k=0.4比较合适,而当 deltaX<100时 k=-0.7比较合适,使鱼 既不会向 Z轴正方向调整过度,也不会向 Z轴负方向持续偏离 控球。
②计算新的顶球点。在虚拟洞坐标的基础上计算顶球点, 以虚拟洞和球中心的连线反向延长,得到随球的位置的变化不 停调整的顶球点坐标 MB,计算步骤如下:
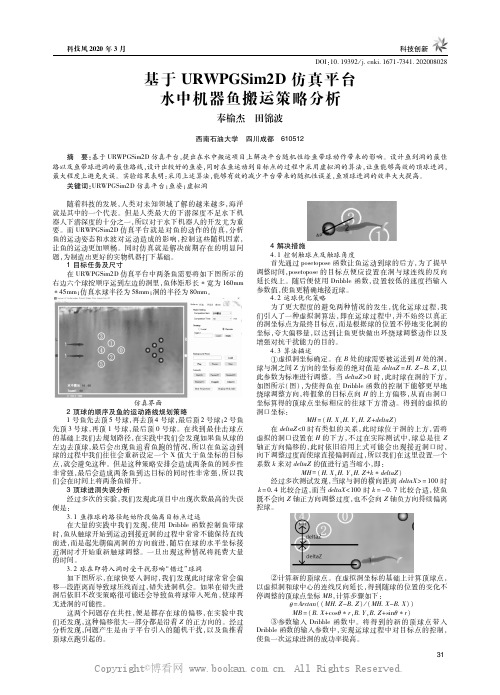
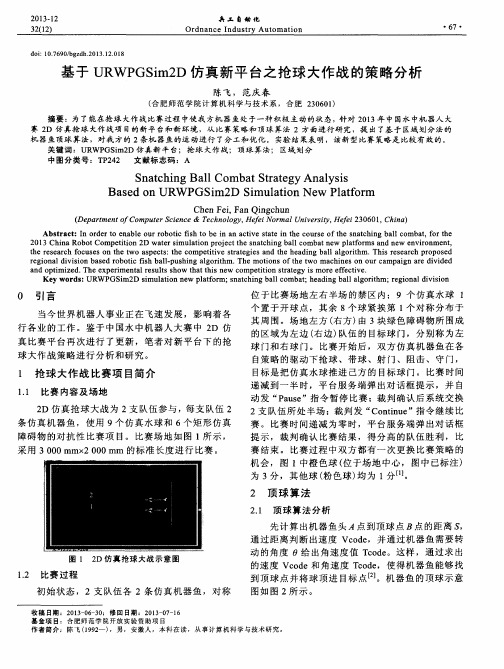
1目标任务及尺寸 在 URWPGSim2D仿真平台中两条鱼需要将如下图所示的 右边六个球按顺序运到左边的洞里,鱼体矩形长80mm。
仿真界面 2顶球的顺序及鱼的运动路线规划策略 1号鱼先去顶 5号球,再去顶 4号球,最后顶 2号球;2号鱼 先顶 3号球,再顶 1号球,最后顶 0号球。在找到最佳击球点 的基础上我们去规划路径,在实践中我们会发现如果鱼从球的 左边去顶球,最后会出现鱼追着鱼跑的情况,所以在鱼运动到 球的过程中我们往往会重新设定一个 X值大于鱼坐标的目标 点,就会避免这种。但是这种策略安排会造成两条鱼的同步性 非常强,最后会造成两条鱼到达目标的同时性非常强,所以我 们会在时间上将两条鱼错开。 3顶球进洞失误分析 经过多次的实验,我们发现此项目中出现次数最高的失误 便是: 3.1鱼推球的路径起始阶段偏离目标点过远 在大量的实践中我们发现,使用 Dribble函数控制鱼带球 时,鱼从触球开始到运动到接近洞的过程中常常不能保持直线 前进,而是起先朝偏离洞的方向前进,随后在球的水平坐标接 近洞时才开始重新触球调整。一旦出现这种情况将耗费大量 的时间。 3.2球在即将入洞时受干扰影响“错过”球洞 如下图所示,在 球 快 要 入 洞 时,我 们 发 现 此 时 球 常 常 会 偏 移一段距离而导致球压线而过,错失进洞机会。如果在错失进 洞后依旧不改变策略很可能还会导致鱼将球带入死角,使球再 无进洞的可能性。 这两个问题存 在 共 性,便 是 都 存 在 球 的 偏 移,在 实 验 中 我 们还发现,这种偏移很大一部分都是沿着 Z的正方向的。经过 分析发现,问题产生是由于平台引入的随机干扰,以及鱼推着 顶球点跑引起的。
哈尔滨工程大学--人工智能大作业
水中鱼-花样游泳2013201411,宋梓瑚摘要:水中鱼花样游泳比赛采用水中机器人水球比赛仿真器2D 版(Underwater Robot Water Polo Game Simulator 2D Edition, URWPGSim2D)软件作为比赛平台。
仿真器包括服务端(URWPGSim2DServer)和客户端(URWPGSim2DClient)。
服务端模拟水中比赛环境,控制和呈现比赛过程及结果,向客户端发送实时比赛环境和过程信息;半分布式客户端模拟比赛队伍,加载比赛策略,完成计算决策过程,向服务端发送决策结果。
关键词:水中鱼花样游泳;计算平台;比赛服务器本组成员:宋梓瑚,陈宣宇,王炜镝,张浩然本人分工:水中鱼姿态编写、水中鱼代码设计1 引言1.1水中鱼比赛规则2D 仿真花样游泳是由1 支队伍参与,每支队伍10 条仿真机器鱼,不规定仿真水球和仿真障碍物的非对抗性比赛项目。
2D 仿真花样游泳比赛项目采用标准仿真场地(3000mm*2000mm)1.5 倍尺寸的场地。
比赛过程:初始状态是1 支队伍的10 条仿真机器鱼,位置和方向均随机分布在仿真场地上。
比赛开始后,1 号仿真机器鱼在比赛场地内随机游动,不受参赛队伍的策略控制;其他9 条仿真机器鱼由参赛队伍编写策略进行控制,配合1 号仿真机器鱼进行表演,依次完成标准动作和自由动作。
(1)标准动作阶段:在标准动作阶段参赛队伍按照规则完成标准动作。
标准动作为:1 个包含阿拉伯数字的造型、1 个封闭几何图形、保持所有鱼相同造型和动作 5 秒以上、两个造型之间 5 秒的画面静止。
标准动作顺序不限,可以同时出现。
(2)自由动作阶段: 在自由动作阶段参赛队伍自行设计动作进行表演。
比赛时间递减到零之前,如果队伍表演完成,由参赛队伍向裁判说明,比赛结束,并由裁判根据计分规则给出得分。
比赛时间递减到零,如果队伍表演未完成,比赛结束,由裁判根据可观赏性和协作性给出得分。
启发式挖掘算法
启发式挖掘算法
启发式挖掘算法是一种基于经验和启发式知识的数据挖掘方法,它通过模拟人类的思维方式,利用已知的信息来指导搜索过程,从而更快地找到解决方案。
这种算法通常应用于大规模数据集的挖掘和分析工作中,能够有效地处理复杂的问题,并且具有较高的效率和灵活性。
在启发式挖掘算法中,常用的方法包括遗传算法、模拟退火算法、人工神经网络等。
这些算法都是基于自然界的一些现象或者生物的行为特点进行设计的,能够模拟出生物的进化、遗传、学习等过程,从而更好地应用于解决复杂的优化和搜索问题。
启发式挖掘算法的应用领域非常广泛,比如在工程设计中,可以利用遗传算法来进行优化设计,找到满足一定约束条件的最优解;在金融领域,可以利用模拟退火算法来进行投资组合优化;在医疗健康领域,可以利用人工神经网络来进行疾病诊断和预测。
这些算法都能够帮助人们更好地理解和利用数据,从而取得更好的效果。
启发式挖掘算法的优势在于能够充分利用已有的知识和经验,能够处理大规模和复杂的问题,并且具有较高的适应性和灵活性。
但是,它也存在一些缺点,比如无法保证找到全局最优解,搜索过程比较随机,需要进行多次迭代等。
总的来说,启发式挖掘算法是一种非常有效的数据挖掘方法,它能够很好地解决复杂的优化和搜索问题,为人们的工作和生活带来了很大的便利。
随着人工智能和大数据技术的不断发展,相信启发式挖掘算法会在更多的领域得到应用,为人类社会的发展做出更大的贡献。
基于半场分配的2D仿真抢球博弈策略
1概述国际水中机器人大赛已经成功举办十三届,仿真抢球博弈逐渐进入大众视野,目前抢球博弈的算法已经有基于区域划分法的机器鱼顶球算法的比赛策略等,对仿真鱼的运输路径规划方面已经日趋完善。
针对第十三国际水中机器人大赛的2D 仿真机器鱼抢球博弈比赛项目[2]进行策略的研究,将基于区域划分的机器鱼顶球算法进行更新,完善每个区域的顶球算法,并有机结合,形成针对半场的抢球策略。
对仿真鱼带球进攻等方面进行优化和调整,在算法中增添检测函数,实现仿真鱼高效准确地争抢球。
并且根据半场情况,具有针对性地变更策略,取得博弈比赛的最终胜利。
通过对仿真机器鱼运动轨迹、博弈策略的研究,了解了仿真机器鱼的运动特性以及在仿真机器鱼游动时的位姿。
在仿真平台上进行诸如此类研究的优点在于可以避免机器鱼在真实水下环境中碰到各种复杂的情况,从而避免不必要的成本损耗。
同样地,在平台上进行仿真还可以模拟出仿真机器鱼在水下环境中可能执行的算法策略,充分体现出2D 仿真机器鱼项目基于仿真平台进行策略研究的优越性和必要性。
通过在仿真平台上对2D 仿真机器鱼策略的研究可以为水下实体机器鱼提供参考,将策略算法应用到实体机器鱼上,为监测水低污染,实现海底搜寻等海洋科技和水下作业等具体应用提供参考依据,并且为现实生活中的博弈方法提供借鉴。
2比赛及平台简介2D 仿真抢球博弈是基于URWPGSim2D 仿真平台进行参赛双方博弈对抗的一个项目。
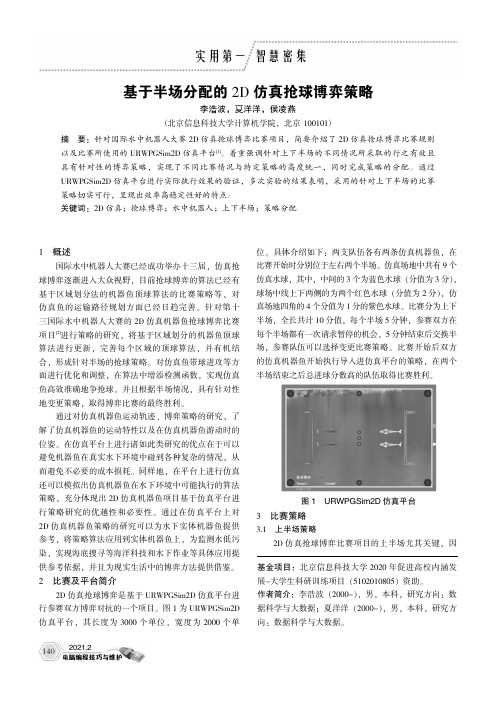
图1为URWPGSim2D 仿真平台,其长度为3000个单位,宽度为2000个单位。
具体介绍如下:两支队伍各有两条仿真机器鱼,在比赛开始时分别位于左右两个半场。
仿真场地中共有9个仿真水球,其中,中间的3个为蓝色水球(分值为3分),球场中线上下两侧的为两个红色水球(分值为2分),仿真场地四角的4个分值为1分的紫色水球。
比赛分为上下半场,全长共计10分值,每个半场5分钟,参赛双方在每个半场都有一次请求暂停的机会,5分钟结束后交换半场,参赛队伍可以选择变更比赛策略。
仿真机器鱼抢球博弈策略的研究.doc
仿真机器鱼抢球博弈策略的研究-摘要:针对国际水中机器人大赛2D仿真项目抢球博弈,提出了一种基于场地区域划分的运球策略。
该策略合理利用比赛场地,进行区域划分,在直线运球时设置多个中间目标点降低了运球误差,以及在狭窄区域利用仿真机器鱼的身体、鱼鳍和鱼尾等鱼体各部位进行运球。
此策略避免了因鱼体与场地边缘相互作用而导致的失真现象,提高了进球效率。
关键词:机器鱼;2D仿真;区域划分;运球策略一、前言近年来,随着仿生学和机器人技术的发展,仿生机器人取得了很大的进步。
鱼类在游动的时候具有高推进效率和机动性、低噪声、高隐蔽性等优点[1],这些优点引发了研究鱼类的运动机理和开发仿鱼类水中机器人的热潮。
URWPGSim2D仿真平台提供了一种仿生机器鱼的实时仿真系统,它可以模拟仿生机器鱼的游动规律和位姿变化,验证仿生机器鱼协作算法与执行任务的策略。
在此基础上,国际水中机器人联盟组织了国际水中机器人大赛,并设立2D仿真项目。
抢球博弈是在URWPGSim2D仿真平台版本更新后新增的2D仿真项目,任务较为复杂,对抗性强,尤其是系统随机产生的模拟水波以及仿真机器鱼和场地边缘相互作用时的失真情况,导致了鱼体坐标和位姿的跳变[2],使仿生机器鱼对水球的控制难度提高了很多。
此项比赛目前还没有优势较为明显的策略,因此本文提出了一种基于比赛场地区域划分的仿真机器鱼运球策略以解决这些问题。
二、抢球博弈比赛平台简介2D仿真抢球博弈比赛平台是URWPGSim2D仿真平台中的一个对抗类比赛项目。
它由两支队伍参与,每支队伍有2条仿生机器鱼,初始状态时呈对称分布在左、右半场,场中共有9个仿真水球,3个蓝色水球(编号为0、1、2,每球各3分)位于场地正中央,2个红色水球(编号为7、8,每球各2分)位于场地中线上下方,4个紫色水球(编号为3、4、5、6,每球各1分)位于场地四角。
左、右各有一个球门,在初始状态时,各队球门都在其身后,通过计算10分钟内机器鱼的进入己方球门的所有球对应的总分判定胜负,分数高者获得胜利。
二维下料问题的启发式算法
二维下料问题的启发式算法作者:田志波来源:《科教导刊》2009年第08期摘要对于二维下料问题,平均利用率最大化为目标,建立数学模型,并在充分满足切断式切割方式的基础上,定义了随机决策方法和最适面积决策方法对下料方案进行决策,基于优先级和下料方案的不同组合,构造了四种结构相同的启发式算法。
数据测试结果表明,四种启发式算法均可有效求解该问题,且采用面积优先级规则和最适面积决策方法实现的启发式算法效果最佳。
关键词二维下料数学模型启发式中图分类号:TB11文献标识码:A1 引言实际生产中经常需要对标准尺寸原材料进行切割,以满足加工需要,称为下料问题(Cutting Stock Problem)。
典型的二维下料问题可表述如下:将若干相同规格的矩形原材料切割成若干种规格的矩形零件,下料时零件的边必须分别和原材料的边平行,所有零件的厚度均与原材料一致。
特别当所有零件的宽度均与原材料相等,则问题称为一维下料问题。
目前通常主要涉及一些板材等的下料问题和纸张、布料等的排样问题。
相关数据统计,原材料成本占总生产成本的45%~60%,而下料方案的优劣直接影响原材料的利用率,进而影响原材料成本。
本文以原材料平均利用率最大化为目标,有针对性的对二维下料问题展开研究。
为方便说明,将原材料定义为母板,切割后材料定义为子板,该问题的几何约束可概括为以下四个方面:其一,母板的长边长度不可小于子板的长边长度,同时,其短边长度不可小于子板的短边长度;其二,当对母板进行切割设计时,排布于同一块母板上的所有子板,其平行于母板的长度方向的边长之和不可超过母板长度方向的边长,同时,其平行于母板的宽度方向的边长之和不可超过母板宽度方向的边长;其三,每块母板下料得到的所有子板面积之和不得超过其自身面积,并且,排布于同一块母板上的子板之间不允许存在面积上的交叠或覆盖。
在该问题研究过程中,不考虑边缘切损量。
如果不考虑子板在母板上排列的几何约束,把母板看成背包,把子板看成待装包的物品,将母板面积作为背包容量,那么,该下料问题则可被归结为一类特殊的多背包问题,在运筹学和优化领域,其为经典的NP-hard问题。
基于URWPGSim2D仿真新平台之抢球大作战的策略分析
3 2 ( 1 2 )
兵 工 自动 化 Or d na nc e I n d us t r y Aut o ma t i o n
・6 7・
基 于 UR WP GS i m2 D仿 真 新平 台之 抢球 大作 战 的策 略 分析
陈 飞 ,范 庆 春
C h e n F e i , F a n Q i n g c h u n
( De p a r t me n t o fC o m pu t e r S c i e n c e& T e c h n o l o g y , He f e i No r ma l U n i v e r s i t y , He f e i 2 3 0 6 0 1 , C h i n a )
的区 域 为 左 边 ( 右边) 队 伍 的 目标 球 门 , 分 别 称 为 左
真 比赛 平 台再 次进 行 了 更 新 ,笔 者 对 新 平 台下 的抢 球 大作战策略进行分 析和研究 。
t h e r e s e a r c h f o c u s e s o n t he t wo a s p e c t s : t h e c o mp e t i t i v e s t r a t e g i e s a n d t h e h e a d i n g b a l l a l g o r i t h m. Th i s r e s e a r c h p r o p o s e d
中图 分 类号 :T P 2 4 2 文 献标 志 码 :A
S n a t c h i n g Ba l l Co mb a t S t r a t e g y An a l y s i s Ba s e d o n URW PGS i m2 D S i mu l a t i o n Ne w Pl a t t e l r i l l
[整理版]数学建模中用到的启发式算法
![[整理版]数学建模中用到的启发式算法](https://img.taocdn.com/s3/m/5b243971f4335a8102d276a20029bd64783e6273.png)
启发式搜索"启发"( heuristic)是关于发现和发明规则及方法的研究。
在状态空间搜索中, 启发式被定义成一系列规则, 它从状态空间中选择最有希望到达问题解的路径。
人工智能问题求解者在两种基本情况下运用启发式策略:1.一个问题由于在问题陈述和数据获取方面固有的模糊性可能使它没有一个确定的解。
医疗诊断即是一例。
所给出的一系列症状可能有多个原因; 医生运用启发搜索来选择最有可能的论断并依此产生治疗的计划。
视觉问题又是一例。
看到的景物经常是模糊的, 各个物体在其连接、范围和方向上可以有多个解释。
光所造成的幻觉加大了这些模糊性, 视觉系统可运用启发式策略选择一给定景象的最有可能解释。
2.一个问题可能有确定解, 但是求解过程中的计算机代价令人难以接受。
在很多问题(如国际象棋)中, 状态空间的增长特别快, 可能的状态数随着搜索的深度呈指数级增长、分解。
在这种情况下, 穷尽式搜索策略, 诸如深度优先或广度优先搜索,在一个给定的较实际的时空内很可能得不到最终的解。
启发式策略通过指导搜索向最有希望的方向前进降低了复杂性。
通过仔细考虑, 删除某些状态及其延伸, 启发式算法可以消除组合爆炸, 并得到令人能接受的解。
然而, 和发明创造的所有规则一样, 启发式策略也是极易出错的。
在解决问题过程中启发仅仅是下一步将要采取措施的一个猜想。
它常常根据经验和直觉来判断。
由于启发式搜索只有有限的信息,诸如当前Open表中状态的描述,要想预测进一步搜索过程中状态空间的具体的行为很难办到。
一个启发式搜索可能得到一个次最佳解, 也可能一无所获。
这是启发式搜索固有的局限性。
这种局限性不可能由所谓更好的启发式策略或更有效的搜索算法来消除。
启发式策略及算法设计一直是人工智能的核心问题。
博奕和定理证明是两个最古老的应用: 二者都需要启发式知识来剪枝以减少状态空间。
显然, 检查数学领域中每一步推理或棋盘上每一步可能的移动是不可行的。
安徽大学2015年大学生创新创业训练计划项目一览表

3 4 5 3 4 1 4 3 3 5 5 4 5 3 4 4 3 4 5 3
高校移动图书馆微信公众平台 创新训练项目 徐罕 的设计与实现 基于Android平台的吉他调音 器的设计与实现 创新训练项目 于阿强
智能视频监控的高效算法及其 创新训练项目 梁宏伟 嵌入式平台实现 基于数据网络预测驱动基因的 创新训练项目 李小宇 计算方法研究 矩阵编码在图像信息隐藏中的 创新训练项目 段宗举 应用 基于多目标优化的光伏最大功 创新训练项目 包星星 率点追踪问题研究 《计算机组成与体系结构》虚 创新训练项目 王钰龙 拟实验平台的研究与开发 创新训练项目 马金億
哲学系
哲学系
历史系 艺术学院 法学院 社会与政治学 院 社会与政治学 院
新媒体的标题内容相符性及发 201510357071 布渠道对其可信度影响的研究 创新训练项目 谢彩连 ——以微信为例 侯家寨文化出土陶器制作工艺 201510357072 创新训练项目 张瑞 的研究 201510357073 201510357074 国家级“非遗”-灵璧磬石雕 刻工艺与产业化调研 创新训练项目 叶晟
便携式扩音器啸叫抑制系统的 创新训练项目 朱闻起 设计 基于以太网传输的微网监测系 创新训练项目 欧博文 统设计
当代乡村建设的实践如何走得 201510357068 更远——对碧山计划困境成因 创新训练项目 徐道星 和对策分析 201510357069 “编吧”互联网文学互动平台 创新训练项目 孙美君 201510357070 体育运动对大学生积极心理品 创新训练项目 柳涛 质的促进效应研究
酿酒酵母工程菌外源抗菌肽基 创新训练项目 吴思群 因转录水平分析
利用海洋新型α -淀粉酶AmyP 201510357023 制备大米慢消化淀粉的应用研 创新训练项目 韩伟 究 金福菇发酵胞外多糖抗衰老作 201510357024 创新训练项目 黄静 用研究 201510357025 201510357026 201510357027 金钗石斛多糖硒化修饰及活性 创新训练项目 黄炎 研究 β -葡萄糖苷酶Bgl1A的微氧发 创新训练项目 潘宇 酵改造 糖多孢红霉菌中亮氨酸应答调 创新训练项目 王春宇 控因子Lrp的功能解析 创新训练项目 王朝辉
安徽大学2015年大学生创新创业训练计划项目一览表
201510357046 基于NFC的门禁系统 201510357047 201510357048
基于RFID技术的游泳池智能收 创新训练项目 高满意 费系统 超市无源电子价签显示系统的 创新训练项目 符淑云 设计
201510357049 腕式人体生理参数测量报警器 创新训练项目 李建 201510357050 201510357051 新型无人机电磁弹射 (EMALS)装置 创新训练项目 夏玉洁
“穹顶之下”的智能监测及远 创新训练项目 高长生 程控制家居系统 创新训练项目 金冬子
201510357052 基于STM32的智能淋浴系统 201510357053 201510357054 201510357055
基于AVR单片机的LED自适应室 创新训练项目 江熠 内灯光调节 基于多传感器融合技术的远程 创新训练项目 陈昊 智能沼气池监控系统 基于“云”技术的曲房远程测 创新训练项目 王传旭 控系统
安徽大学2015年大学生创新创业训练计划项目
项目负责人 院系 项目编号 项目名称 项目类型 姓名 数学科学学院 物理与材料科 学学院 物理与材料科 学学院 物理与材料科 学学院 物理与材料科 学学院 物理与材料科 学学院 化学化工学院 化学化工学院 化学化工学院 化学化工学院 化学化工学院 化学化工学院 化学化工学院 化学化工学院 化学化工学院 201510357001 201510357002 201510357003 201510357004 201510357005 201510357006 201510357007 201510357008 基于热平衡方程的警用热成像 创新训练项目 刘莹 森林防火侦察无人机 硫化钴作染料敏化太阳能电池 创新训练项目 秦天泽 对电极的研究 新型CoFe/CoFe2O4复合材料的 创新训练项目 祝翔 制备与磁性研究 微加工技术在高精度位移传感 创新训练项目 段懿炜 器中的应用 自适应型长程光学吸收池研究 创新训练项目 王哲强 与设计 基于压电材料的风能采集器的 创新训练项目 范梦雅 设计与试验研究 过渡金属氧化物锂离子电池负 创新训练项目 李鹏程 极材料的制备与研究 金属掺杂纳米氧化锌的制备及 创新训练项目 胡策 其光催化降解性能研究 创新训练项目 吴念念 创新训练项目 王康 创新训练项目 王海宁 创新训练项目 张霁 创新训练项目 陈媛 学号 A01214116 B51314018 B51314034 B51314005 B21214061 B31314023 C51314015 C51314030 C01314035 C01314065 C01314055 C51314048 C41314053 C51314051 C41314043
基于urwpgsim2d仿真平台“抢球博弈”项目的策略分析
7 及以上系统曰 渊3冤 IDE: Microsoft Visual Studio Team System 2008
Team Suite with SPI, 或 Microsoft Visual Studio 2008 Pro鄄 fessional SPI遥
渊1冤 如图 1 所示袁 让两条机器鱼选两颗蓝色球将其 顶到上方和下方袁 从而实现一鱼带多球袁 如图 2 所示袁 如果机器鱼将中间蓝球带入指定区域袁 或者超过规定的 时间还未将中间的蓝球带入指定区域袁 就直接跳出带球 进框函数袁 此过程的时间约束是为了防止对手将鱼顶入 对方球门而来不及拦截遥
开始
N N
2020.02 109
场队伍得相应分数袁 在一场比赛之内袁 若每个球被多次 顶进同一队伍的目标球门袁 那么只计分一次袁 并不会被 重复计分袁 同时被顶出球门之外也不会扣分遥
渊4冤 当比赛过半之后袁 平台服务端将会自动弹出对 话框提醒双方队伍把控时间袁 同时发出 野Pause冶 指令袁 自动将比赛暂停曰 然后由裁判调节系统之后袁 双方交换 场地袁 换场时双方队伍可重新加载策略袁 换场之后曰 裁 判发 野Continue冶 指令继续比赛遥
基于 URWPGSim2D 仿真平台“抢球博弈“项目的策略分析
贾晓强,杜美玉,王欣浩 (内蒙古工业大学,呼和浩特 010080)
摘 要院 为了妥善处理抢球博弈项目中机器鱼路径规划方面所存在的一系列矛盾问题,从不同层面、不同 维度对基于 URWPGSim2D 仿真平台的“抢球博弈“项目策略展开了深入剖析,旨在筛选出最优策略,进 一步强化机器鱼的绕障能力,在确保高得分率的情况下又可以灵活应变。对比赛环境、比赛平台、比赛内 容及规则进行了详细介绍,对两种完全不同的上半场抢球策略进行逐一分析,总结得出两种策略的得分情 况,综合多方面因素考虑得出优先使用策略 1,并结合实际比赛情况辅之策略 2 的结论。 关键词院 国际水中机器人大赛;URWPGSim2D 仿真平台;抢球博弈策略;机器鱼
水中机器人水中搬运项目策略优化
0 引言近年来,国际水中机器人大赛已经越来越获得重视。
国际水中机器人大赛是目前首个也是唯一的一个由中国高校发起并创立竞赛标准的国际性高端学科竞赛。
国际水中机器人大赛共分为全局视觉组,自主视觉组,2D 仿真组和自由创意组,其中仿真2D 组分为水中搬运,花样游泳,障碍越野,抢球博弈等项目。
本文聚焦于2D 仿真组中的水中搬运项目,分析在URWPGSim2D 仿真平台下我们如何在尽量短的时间内让仿真机器鱼准确将球顶入预设的位置中。
1 仿真平台及项目介绍1.1 URWPGSim2D 仿真平台介绍URWPGSim2D 仿真平台是由北京大学智能控制实验室开发的水中机器人竞赛平台和水中机器人科研台。
URWPGSim2D 仿真平台包括服务端和客户端两大部分,服务端用于模拟真实水环境,呈现仿真过程,记录仿真结果,并向客户端实时提供仿真信息。
客户端分为半分布式客户端和全分布式客户端,半分布式客户端用于模拟水中机器人队伍,全分布式客户端用于模拟单个水中机器人,加载比赛策略,完成决策计算过程,向服务端发送决策计算结果[1]。
仿真场地大小为4500mmX3000mm。
鱼的控制主要决策数据类型包括两个int 成员,VCode 为速度档位值,TCode 为转弯档位值。
VCode 取值范围0-14共15个整数值,每个整数对应一个速度值,速度值整体但非严格递增,有个别档位值对应的速度值低于比它小的档位值对应的速度值;TCode 取值范围0-14共15个整数值,每个整数对应一个角速度值,整数7对应直游,角速度值为0,整数6-0,8-14分别对应左转和右转,偏离7越远,角度速度值越大,而且任意两个档位之间切换,都需要若干个仿真周期,才能达到稳态。
1.2 水中搬运项目介绍(1)初始状态,在场地右半区放置了六个小球,分别编号0~5号,与之对称在左半场规定了六个圆形球框作为目标位置,对应编号0~5号。
两条仿真机器鱼也位于左半场,编号1~2号。
基于障碍物动态平衡的2d仿真生存挑战策略
2020年6期方法创新科技创新与应用Technology Innovation and Application基于障碍物动态平衡的2D 仿真生存挑战策略何芮,蒋昊,李欣雨(西南石油大学电气信息学院,四川成都610000)引言URWPGSim2D 仿真平台提供一种仿真机器鱼的实时系统,采用面向对象思想。
从对象建模的角度看,包括仿真机器鱼、仿真环境和仿真使命(比赛或实验项目)三类模型,以仿真使命模型为中心,较真实地仿真出仿生机器人的运动状态。
笔者基于使用2018年URWPGSim2D 仿真平台参加比赛时使用的策略对生存挑战项目进行研究和改进,提出一种围绕障碍物动态平衡的策略和一种可控速的位姿到位姿函数,能较好的使防守鱼和进攻鱼达到一种动态平衡状态,延长了防守鱼的存活时间。
1生存挑战项目介绍2D 仿真生存挑战是由2支队伍参与,每支队伍4条仿真机器鱼,生存挑战比赛项目比赛场地采用标准仿真场地(3000mm*2000mm )的1.5倍尺寸的场地,即规格为4500mm*3000mm ,场地中央有三块固定的正方形障碍物,其边长为400mm ,中心点坐标分别为(0,700),(0,0),(0,-700)。
比赛初始状态时,防守方有4条机器鱼,1号鱼为特殊鱼,充当“防御手”的角色;2,3,4号鱼为常规鱼,充当“躲避手”的角色,进攻方只有一条鱼,为特殊鱼,充当“捉捕手”的角色。
比赛总时长10分钟,分上下半场,一个半场时长5分钟,上下半场切换,进攻方和防守方亦交换。
比赛时,“捉捕手”要尽量抓捕“躲避手”,“躲避手”要尽量躲避“捉捕手”。
比赛结束后,通过“捉捕手”抓捕的“躲避手”数量和抓捕时间判断输赢。
2动态平衡路线分析由生存挑战项目介绍可知,进攻鱼的最大速度档是15档,而防守2、3、4号鱼的最大速度档是8档。
假设进攻鱼和防守鱼暴露在一条直线上,凭借进攻鱼在速度上的优势,进攻鱼可以很轻松的抓捕到防守鱼。
而当进攻鱼的路线为一条曲线时,进攻鱼的速度不能时刻保持15档,运动曲线的半径越小,进攻鱼能达到的最大速度档越小。
mip启发式算法
mip启发式算法摘要:1.引言2.MIP启发式算法的定义和特点3.MIP启发式算法的基本原理4.MIP启发式算法在解决组合优化问题中的应用5.实例分析6.总结与展望正文:【引言】在当今复杂多样的优化问题中,启发式算法作为一种求解方法,得到了广泛的关注。
其中,MIP(Mixed-Integer Programming,混合整数规划)启发式算法在解决组合优化问题中具有显著优势。
本文将详细介绍MIP启发式算法的基本概念、原理以及在实际问题中的应用,以期为读者提供有益的参考。
【MIP启发式算法的定义和特点】MIP启发式算法是一种求解混合整数优化问题的方法。
它结合了整数规划和连续优化技术的优点,可以有效地解决具有整数约束的优化问题。
MIP启发式算法具有以下特点:1.高效性:相较于传统的整数规划方法,MIP启发式算法在求解过程中可以更快地找到近似最优解。
2.灵活性:MIP启发式算法可以处理多种类型的整数约束,适应性强。
3.易于调整:根据问题特点,可以方便地调整算法参数以提高求解效果。
【MIP启发式算法的基本原理】MIP启发式算法主要基于以下几个步骤:1.构建混合整数规划模型:根据问题特点,建立混合整数规划数学模型。
2.初始解生成:采用启发式方法生成初始解。
3.局部搜索:在初始解的基础上,采用局部搜索策略改进解的质量。
4.邻域搜索:在局部搜索的基础上,进行邻域搜索,扩大解空间,寻找更优解。
5.终止条件:当满足终止条件时,停止搜索,输出当前解。
6.迭代优化:若不满足终止条件,则返回第二步,继续迭代。
【MIP启发式算法在解决组合优化问题中的应用】MIP启发式算法在组合优化问题中具有广泛的应用,如:1.运输问题:通过MIP启发式算法求解货物分配问题,优化运输方案。
2.背包问题:利用MIP启发式算法解决有限资源下物品选择问题,提高效益。
3.车辆路径问题:通过MIP启发式算法优化车辆调度,降低成本。
【实例分析】以运输问题为例,假设有一个制造商和四个销售点,需要将货物从制造商运输到销售点。
基于URWPGSim2D仿真平台的生存挑战策略
基于URWPGSim2D仿真平台的生存挑战策略谢良松;冯治国;赵驯峰;苏小东【期刊名称】《兵工自动化》【年(卷),期】2018(037)003【摘要】In order to win a confrontational game in a short time, the survival challenge strategy of URWPGSim2D simulation platform based on the International Water Robot Competition Survival Challenge Project was proposed. According to the rules of the competition, this paper proposes and designs an obstacle isolation strategy for water-robot which uses obstacles to avoid opponents and has been validated through experiments and competition. The results show that this strategy can make the water-robot effectively avoid the opponent attacks, and provide a reference for the treatment of obstacles in other games.%为在短时间赢得对抗性比赛,提出基于国际水中机器人大赛生存挑战项目之 URWPGSim2D 仿真平台的生存挑战策略.根据大赛规则,提出并设计障碍物隔离策略,利用障碍物躲避对手,并经过实验和比赛验证.结果表明:该策略能有效躲避对方攻击,为其他对抗类比赛在障碍物的处理上提供参考.【总页数】3页(P9-11)【作者】谢良松;冯治国;赵驯峰;苏小东【作者单位】贵州大学机械工程学院,贵阳 550025;贵州大学机械工程学院,贵阳550025;贵州大学机械工程学院,贵阳 550025;贵州大学机械工程学院,贵阳550025【正文语种】中文【中图分类】TJ610【相关文献】1.基于URWPGSim2D仿真新平台的水中搬运的策略优化 [J], 贺明飞;马天增;谢良松;刘祥2.基于URWPGSim2D仿真新平台的花样游泳策略 [J], 贺明飞;马天增;谢良松3.基于URWPGSim2D仿真平台的测试分析与策略改进 [J], 王梅娟;李易凡;范彬彬4.基于URWPGSim2D仿真平台水中机器鱼搬运策略分析 [J], 奉榆杰; 田锦波5.基于URWPGSim2D仿真平台"抢球博弈"项目的策略分析 [J], 贾晓强; 杜美玉; 王欣浩因版权原因,仅展示原文概要,查看原文内容请购买。
基于URWPGSim2D平台的机器鱼稳定性及路径规划
基于URWPGSim2D平台的机器鱼稳定性及路径规划柯浩康;王超【期刊名称】《兵工自动化》【年(卷),期】2018(037)004【摘要】水中机器人水球比赛2D仿真平台URWPGSim2D是对水中机器人进行仿真测试的平台,由北京大学智能控制实验室组织开发,真实模拟仿真机器鱼各个关节的位姿变化,运动状态变化及机器鱼水球比赛运行等状况.基于 URWPGSim2D 平台提供的策略,经过大量实验对比,对水中机器人在仿真环境下的稳定性进行深入研究,意在提高水中机器人的稳定性,从而提高仿真比赛项目策略的健壮性,进而为未来实体水中机器人奠定良好的算法基础.该策略实现的比赛程序在2016年国际水中机器人大赛中荣获二等奖,表明了策略的有效性.%Water Robot Water Ball Competition 2D Simulation Platform URWPGSim2D is a platform for simulation testing of water robots. It is developed by the Peking University Intelligent Control Laboratory. It simulates the joint gesture changes of robot fish, motion state change and robot fish water ball completion running and so on. The strategy is based on URWPGSim2D platform, through large amount of test completion, research on the water robot stability under simulation environment, which aims to improve the stability of the underwater robot. Further, it can be used to improve the robustness of the simulation project strategy and lay a good foundation of algorithm, for the solid water robots in future. This strategy has achieved the gameprogram in the 2016 International Water Robot Competition won the second prize, which indicates its effectiveness.【总页数】4页(P93-96)【作者】柯浩康;王超【作者单位】北京信息科技大学计算机学院北京 100101;北京信息科技大学计算机学院北京 100101【正文语种】中文【中图分类】TP242.6【相关文献】1.基于混合算法的仿生机器鱼路径规划 [J], 汪科2.基于遗传算法的机器鱼水中路径规划 [J], 李连鹏;苏中;解迎刚;刘福朝3.一种基于中垂线路径规划的仿真机器鱼射门算法 [J], 赵国冬;王顺礼;马树朋;吕烨鑫4.基于URWPGSim2D仿真平台水中机器鱼搬运策略分析 [J], 奉榆杰; 田锦波5.基于双目视觉的仿生机器鱼路径规划研究 [J], 杨静因版权原因,仅展示原文概要,查看原文内容请购买。
水中机器人2D仿真水中搬运策略优化
水中机器人2D仿真水中搬运策略优化张庆刚;孙康博;崔渠【期刊名称】《兵工自动化》【年(卷),期】2018(037)003【摘要】Optimize and improve the existing competition strategy based on URWPGSim2D Simulation platform. First, a new game strategy is proposed from the whole level. Then, based on the uncertainty of the platform, PID fuzzy control[1] is introduced to optimize the basic action. Finally, to solve the problem that it is difficult to dribble balls in a close distance, the algorithm of close distance tail-cutting dribbling is proposed and tested by simulated experiments. The experiment results show that the total time taken by dribbling the ball is reduced by 34.78%, and the accuracy of the ball movement is improved obviously, which can achieve the goal of fast dribbling.%基于 URWPGSim2D 仿真平台,对现有的比赛策略进行优化和改进.首先从整体层次出发提出一种全新的比赛策略;然后针对平台不确定性,引入了 PID模糊控制对基础动作进行优化;最后,针对近距离带球难以精确控制的问题,提出了近距离尾切式顶球算法,并进行模拟实验验证.实验结果表明:带球总耗时降低约34.78%,带球动作的精准度明显提高,能够实现快速带球的目标.【总页数】4页(P5-8)【作者】张庆刚;孙康博;崔渠【作者单位】西北工业大学计算机学院,西安 710129;西北工业大学电子信息学院,西安 710129;西北工业大学教育实验学院,西安 710129【正文语种】中文【中图分类】TJ6【相关文献】1.基于URWPGSim2D仿真新平台的水中搬运的策略优化 [J], 贺明飞;马天增;谢良松;刘祥2.水中机器人2D仿真水球斯诺克策略优化 [J], 高俊杰;贾翠玲;李卫国3.水中机器人2D仿真的策略优化 [J], 仇红剑;赵伟;夏庆锋4.水中机器人水中搬运项目策略优化 [J], 余正秦; 尚虹霖5.基于URWPGSim2D仿真平台水中机器鱼搬运策略分析 [J], 奉榆杰; 田锦波因版权原因,仅展示原文概要,查看原文内容请购买。
基于启发式算法的移动机器人SLAM
基于启发式算法的移动机器人SLAM仉新;张禹;苏晓明【摘要】To realize the mobile robot autonomous navigation under GPS signal missing and solve the problem that the positioning and navigation accuracies of the mobile robot are decreased due to the degradation and scarcity of particles in the traditional particle filter, a method of particle filter in simultaneous localization and mapping is proposed based on the niche theory of heuristic bat optimization algorithm. First, in the process of speed and position updating of heuristic bat optimization algorithm, an inertia weight is introduced to speed up the optimization of the algorithm and improve the convergence speed. Then, the niche theory is used to further optimize the heuristic bat algorithm, and the exclusion mechanism and penalty function are used to effectively guarantee the diversity of the population and improve the global optimization ability of the algorithm. Finally, the niche theory based heuristic bat algorithm is used to optimize the sampling process of the particles, which makes the particles move to the high likelihood region and improves the global optimization ability and precision. Experimental results show that the proposed algorithm significantly improves the positioning precision and the real time performance of the mobile robot.%为了实现GPS信号缺失下的移动机器人自主导航,解决传统粒子滤波中的粒子退化以及粒子贫乏引起的移动机器人定位和导航精度下降问题,提出了基于小生境理论的启发式蝙蝠优化粒子滤波的同时定位与地图构建算法.首先,在启发式蝙蝠优化算法的速度和位置更新过程中,引入惯性权重,加快了算法寻优精度,提高了收敛速度;然后,利用小生境理论进一步优化启发式蝙蝠算法,利用排挤机制和惩罚函数,有效地保证了种群的多样性,提高了算法的全局寻优能力;最后,将基于小生境理论的启发式蝙蝠优化算法用于传统粒子滤波采样中,使得粒子能够智能、快速地向高似然区域运动,同时提高了传统粒子滤波算法的全局寻优能力和寻优精度.实验结果表明:该算法显著提高了移动机器人导航和定位的精度和实时性.【期刊名称】《中国惯性技术学报》【年(卷),期】2018(026)001【总页数】6页(P45-50)【关键词】同时定位与地图构建;粒子滤波;启发式算法;蝙蝠算法【作者】仉新;张禹;苏晓明【作者单位】沈阳工业大学机械工程学院,沈阳 110870;沈阳工业大学机械工程学院,沈阳 110870;沈阳工业大学机械工程学院,沈阳 110870【正文语种】中文【中图分类】TP242随着人工智能和计算机视觉技术的发展,移动机器人在自主导航、服务、工业自动化等领域具有重要应用。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
一种基于URWPGSim2D启发式博弈策略设计摘要:针对北京大学机器鱼仿真平台URWPGSim2D 中“抢球博弈”项目控制目标数量多,仿真机器鱼之间的对抗性与团队协作性强,复杂多变的竞赛规则与模拟环境,设计一套稳定,有效且对抗性强的控制策略,实现仿真鱼的协同分工,最终获得比赛胜利。
由于仿真环境的复杂性与不确定性,为提高控制策略的高效性,提出先对仿真鱼进行任务分工;其次依据仿真周期数将比赛进行阶段划分,再次根据场地中目标水球的位置信息将场地进行区域划分,最后利用启发函数计算目标球优先级。
然后综合考虑这四个因素,给出多仿真鱼协同抢球的高效策略。
该策略在“2015国际水中机器人大赛”中获得一等奖的成绩,充分证明了该优化策略的有效性及鲁棒性。
关键词:仿真鱼;抢球博弈;协作;启发函数;多目标;优先级中图分类号:TP242.6 文献标志码: A 文章编号:1009-3044(2016)12-0075-05以北京大学作为发起人联合众多科研机构同开发了水中机器人URWPGSim2D (under robot water polo game simulation 2D)仿真平台,该仿真系共统具有实时性强,逼真性高和人机交互性强的特点,有效地解决了实体机器鱼在研究过程中遇到的问题,降低了实体鱼的研究难度。
在2015年5月发布的新的仿真平台URWPGSim2D 3.0中,抢球博弈项目的球门位置与模型均未发生变化,而目标球的位置,目标球分值及项目规则均有较大变化。
平台版本的更新使得在制定策略的时候需要更多的考虑单个目标球对比赛得分的影响,而且对机器鱼的运输有效性提出了更高的要求。
因此本文分别对制约策略有效性的四个因素进行了优化,得到了一种在新平台下更为有效的智能策略。
1 水中机器人2D仿真简介1.1 URWPGSim2D平台简介URWPGSim2D包括服务(URWPGSim2DServer)和客户端(URWPGSim2DClient)两大部分。
服务端模拟水中环境,控制和呈现仿真过程及结果,向客户端发送实时仿真环境和过程信息;半分布式客户端模拟水中机器人队伍,全分布式客户端模拟单个水中机器人,加载比赛或实验策略,完成决策计算过程,向服务端发送决策结果[1]。
其整体结构如图1所示:1.2 抢球博弈项目简介水中机器人2D仿真抢球博弈采用3000mm*2000mm的标准比赛场地。
2D仿真抢球博弈项目的仿真环境包括4条被分为两支队伍的仿真鱼,9个拥有不同分值的仿真水球和2个由矩形障碍物组成的球门。
随着多次大赛的成功举行,为了提高比赛对抗的激烈性和机器鱼团队之间的协同性,开发人员将平台做了如下更新(如图2,图3)所示。
1.3 计分规则1)水球分值:在图3中场地四个角落的目标球分值均为一分,场地中心附近的三个目标球分值均为三分,其余两个球的分值均为两分。
2)胜负标准:单场比赛,在6000个仿真周期内得分多的队伍获胜,若分数相同则率先进球的队伍获胜。
3)进球得分:仿真水球被顶入球门时,该球门对应的队伍得到相应分数,每个球在一场比赛中如果被多次顶入同一队伍的球门,不重复计分被顶出不扣分。
2策略设计思想2.1 策略运行原理仿真平台开始运行后,平台就会以40ms为周期循环执行策略,以6000仿真周期总数逐步减少。
这样的循环执行方式可以有效地提高仿真系统的实时性,使用者先在客户端工程中编写策略,在编译通过后生成后缀名为dll的动态链接库,开发者定义的函数模块和平台的部分信息都被封装在了该dll文件中。
在比赛时双方在同一个服务器端加载各自策略的动态链接库,准备完成之后即可经行比赛。
2.2任务调度在笔者所提出的策略中每条己方仿真鱼都有两种任务的动态调度,一种任务是己方运球得分,另一种任务是破坏对方得分。
处于运球任务的仿真鱼根据选球函数计算出来的优先级确定运输目标,将目标球迅速的运输到己方球门。
处于破坏任务的仿真鱼的是为干扰对方,破坏对方的运球状态,抑制对方的得分。
2.3 区域划分受制于仿真鱼智能水平的限制,仿真鱼并不能主动对仿真场地障碍物和边界做出响应动作,因此会严重影响仿真鱼的动作准确度和运输效率。
因此笔者对比赛场地做了一定的划分,一方面可以在不同的区域赋予仿真鱼不同的动作策略以提高仿真鱼的场地适应能力,另一方面仿真鱼可以根据不同区域中目标球权值的不同可以智能选择最有利的得分区域作为自己行动的目标位置。
Zone 0为主要抢夺区域。
此区域中目标球较多且单个目标球分值较大,需要综合运用多种策略使己方迅速占领优势地位。
Zone 1,Zone 3为己方球门转角区域。
当己方仿真鱼进入此区域后在参考目标点A,M1,B或G,M3,H(右半场则为C,M2,D或E,M4,F)的指引下迅速的完成运输球从Zone 0到Zone 2或Zone 0到Zone3的任务。
为防止仿真鱼将目标球带入场地死角产生僵持现象所以需检测函数,判断是否满足条件后进而调用相应的处理模块解决问题。
Zone 2为己方球门区域。
在此区域己方鱼易得分,加载射门函数,完成射门任务。
Zone 5为敌方球门区域。
在此区域对方易于得分。
对于己方来说,基于对得分规则和运输代价的考虑,己方应在在保证除Zone 5外的区域中无剩余目标球的前提下才去考虑运输Zone 5中的目标球。
Zone 4,Zone 6为敌方球门转角区域。
在此区域不利于己方仿真鱼的抢球动作,且容易在此区域与敌方因为争夺目标球将目标球顶入死角陷入僵持阶段,所以在此区域采取防守策略,通过干扰对方或者堵塞对方进入Zone 5的路径来达到防守目的。
2.4 仿真周期控制抢球博弈项目共10分钟,比赛平台设置的仿真周期即每个仿真循环周期毫秒数(如100ms),转换得到该比赛项目的总仿真周期数(10*60*1000/100=6000);比赛是通过倒计时的方式经行的,笔者在此将依据仿真周期将比赛主要分为两个阶段。
进攻阶段,此阶段为仿真周期数从6000递减至1800之间时间段。
破坏阶段,此阶段为仿真周期数从1800递减至结束比赛之间的时间段。
3 策略设计与实现3.1 仿真鱼协作与任务调度本文中提到的任务调度是由于比赛场上动态信息触发而引起的,笔者认为将场地中仿真鱼的实时状态作为触发信息极具代表性。
在该策略中将仿真鱼所处的状态分为如下程序段所举出的5个状态。
3.1.2 仿真个体控制策略在比赛开始后的50个仿真周期内己方仿真鱼M(M的取值为0,1)完成初始动作,之后判断仿真比赛阶段。
若当前阶段为破坏阶段,以仿真鱼M与对方球门距离为参考,若距离对方球门最近则去对方球门附近干扰对方得分,若不是则转为进攻状态。
若当前阶段为攻击阶段,仿真鱼M选择目标球后,首先判断己方球门是否有多于2个三分球,若满足条件再根据仿真鱼M到对方球门的距离指派具体任务;若不满足条件则继续执行运输目标球的任务。
控制流程如图6所示。
新的平台设置了3个三分球,因此对三分球的控制直接影响着比赛结果。
根据以往策略,敌我双方都为了避免与对方因争夺三分球过多浪费时间,采取一次性运输分值为1或2分的目标球,以求迅速得分占领优势而对于三分球的处理则在比赛较后阶段才会去考虑。
这样不能够及时得到三分球的控制权,因此存在被对方利用三分球得分逆转的巨大风险。
因此本策略摒弃此种设计思想,对三分球的处理如下:比赛开始阶段,己方两条仿真鱼直接选择3个三分球中的两个,在保证至少一个三分球能够顺利运输到己方球门的前提下,在选球策略的指引下获得下一个三分球的控制权。
当己方球门中三分球大于1个时,指派一条仿真鱼做防守动作防止对方争夺;另一条仿真鱼继续选球运输。
控制流程图如图6所示。
3.2 选球策略有效的选球策略在比赛中不仅能够提高队伍的协作能力,而且能够提高己方的得分速率与得分质量,这在实时计时性对抗比赛中对比赛结果有着至关重要的影响作用。
本文提出一种以权值评估为核心的启发函数,该函数综合考虑了仿真鱼、球门和目标球之间的距离关系,旋转代价和目标球分值这四大要素。
启发函数形式如下。
3.2.1 [Ts,v]的计算在URWPGSim2D平台中由于仿真水环境的特殊性,鱼即使没有速度也难以做到相对静止,会在水波的影响下发生位移。
在设置了一个目标点后,仿真鱼到达该点后并不会立即停下,而是会沿着之前的方向运动一段距离。
以此这里设定一个偏移量[μ] ,并近似认为偏移量是在之前的运动方向上。
偏移量[μ][μ]与速度档位VCode之间的对应关系如表1所示:3.2.2 [Aq,ω] 计算由于仿真鱼的动作存在延迟性,导致实际旋转角度会受到上一时刻角速度的影响,因此难以精确控制。
现利用补偿原理添加补偿量,用来抵消前一时刻角速度对仿真鱼旋转的影响。
4 结束语本文综合任务调度,区域划分,仿真周期控制和选球策略几个方面制定了一种提出的突破常规的动作策略,该策略摒弃了局部最优的缺点,使仿真鱼对场上各种变量因素综合评价,智能决策做到随机应变。
经过多次实验验证表明:运用上述策略可使己方在比赛过程中处于有利的主动状态,较大的增加了己方的胜率。
在本策略中主要以目标球作为驱动因素,缺少对另一方仿真鱼动作序列的检测,因此在对方变换策略后不能及时地做出响应动作。
参考文献:[1] 中国水中机器人大赛官方网站.URWPGSim2D开发人员手册[EB/OL].北京:北京大学智能控制实验室.(2010).http://.[2] Liu J,Dukes I,Hu H. Novel mechatronics design for a robotic fish[C]. Proc. 2005 IEEE/RSJ International Conference on Intelligent Robots andSystems,2005:2077-2082.[3] Auzinger D.Djumlija G. Application of advanced technology packages for improved strip profile and flatness inhot-strip-mills[J].Iron and steel,2004,39(11):132-133.[4] 刘舒.多机器鱼编队控制[D].北京:华北电力大学,2012.[5] 龙海楠,李淑琴,安永跃.仿真机器鱼抢球大作战比赛策略的研究[J].计算机仿真,2013,30(7):312-316.[6] 黎章. 多水下机器人协作控制[D].北京:北京大学,2008:1-10.[7] Anna Osborne,Stuart Baur,Katie Grantham.Simulation prototyping of an experimental solar house[J].Energies,2010,8(5):27-35.[8] Leonardand,N.E,Virtual,E.F.Virtual leaders artificial potentials and coordinated control of groups[C].The 40th IEEE Conference on Decision and Control,2001:2968-2973.[9] Denis L,Baggi.Theintelligence left in AI[J].AI & Society,2005(2):27-35.。