基于51单片机的红外遥控器解码设计论文
基于51单片机的红外遥控密码锁毕业论文

基于51单片机的红外遥控密码锁毕业论文目录1 引言 ............................................................. -2 -1.1研究背景与意义 .............................................. - 2 -1.2 研究现状.................................................... - 2 -1.3 研究容...................................................... - 2 -2 系统设计方案 ..................................................... -3 -2.1 总体方案.................................................... - 3 -2.2 系统框图.................................................... - 3 -3 系统硬件电路设计 ................................................. -4 -3.1 单片机最小系统设计.......................................... - 4 -3.2 LCD显示电路设计 ............................................ - 5 -3.3 矩阵键盘电路设计............................................ - 6 -3.4 存储电路设计................................................ - 6 -3.5红外发送接收电路设计 ........................................ - 6 -3.6 模拟锁与报警电路设计............................................. - 6 -3.7系统PCB设计 ................................................ - 6 -4 系统软件设计 ..................................................... - 8 -4.1 程序设计思路............................................... - 13 -4.2 算法与流程图............................................... - 14 -5 系统仿真与硬件调试 .............................................. - 15 -5.1系统仿真和调试方案 ......................................... - 15 -5.2 系统硬件调试............................................... - 16 -5.3 调试结果................................................... - 17 -6 总结与展望 ...................................................... - 18 - 致谢 .............................................................. - 18 -参考文献 .................................................................. - 18 - 附录 .............................................................. - 18 - 1.元器件清单.................................................. - 18 - 2.源程序...................................................... - 19 -引言1.1 研究背景与意义我们知道当某一个公司研发一些新产品时都会特别重视其资料的安全问题,在竞争日益激烈的当下,新研发的产品资料,科研项目,以及单位的文件档案、财务报表,个人资料等等,都是特别保护的对象,万一泄露将直接关系到一个企业的存亡。
基于51多功能红外遥控器设计

界首例将设计流程、集成化 PCB 设计、可编程器件(如 FPGA)设计和基于处理器设计的嵌入式软件开 发功能整合在一起的产品,一种同时进行PCB和FPGA设计以及嵌入式设计的解决方案,具有将设计方案 从概念转变为最终成品所需的全部功能。
Altium Designer 6具有以下几个特点: 在PCB部分,实现了自动引脚优化和非凡的布线效果,提供了对高密度封装(如 BGA)的交互布 线功能, 总线布线功能,器件精确移动,快速铺铜等功能; 在原理图部分,新增加“灵巧粘帖”可以将一些不同的对象拷贝到原理图当中; 在嵌入式设计部分,增强了JTAG器件的实时显示功能,增强型基于FPGA的逻辑分析仪,可以支持 32位或64位的信号输入。
图为STC89C54RD+芯片 及其电路,该芯片与 STC89C51引脚基本相同, 但速度更快,存储空间更大。 本设计采用的是40DIP封装 的双列直插式芯片。
p 电源模块
电源模块包括电源接 口,自锁式电源开关 及红色发光二极管作 为电源指示灯,其中, 电源接口采用了5V圆 孔式接口,与原理图略 有不同
p NEC协议
一直按住按键,一串信息只能发送一次,而后发送的是以110ms 为周期的重复码,如有图所示,重复码是由9ms的AGC高电平和 4.5ms的低电平及一个560us的高电平组成。如左图所示。
红外学习
使用说明
下载程序
红外解码
红外发射
控制外部设备
LOGO
p PCB板开发流程
第一步
第二步
第三步
第四步
NEC协议
基于keilc51的红外遥控器解码设计
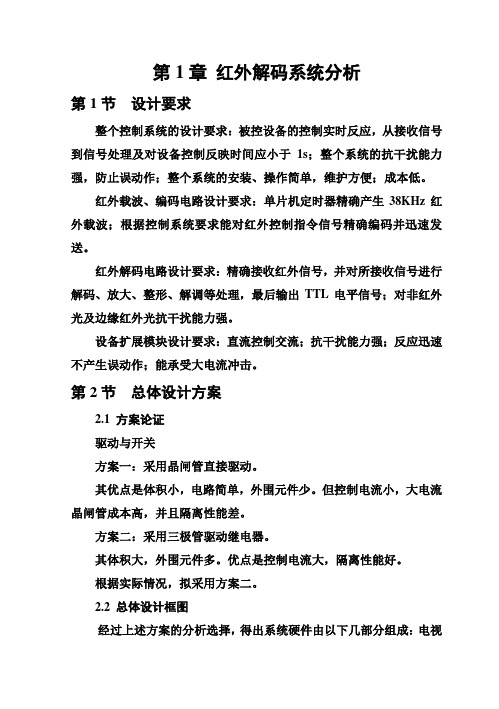
文章编号:1001-9227(2003)06-0011-04基于keil c51的红外遥控器解码设计戴培山 冯成德 刘 栋(四川大学制造学院人机所 成都,610065) 摘 要:介绍了红外遥控器设计的原理,实现了一种利用MCS-51单片机的外部中断口实现红外遥控的接收装置,设计了简洁的keil c51红外接收程序。
该装置集成化高,接收程序的通用性好,可以防止多个红外遥控器的混用和干扰,易于移植到其他红外遥控接收装置。
关键词:MCS-51单片机 keil c51 脉冲间隔 外部中断 计时/计数器ABSTRACT:The article introduced the design theory and method of the infrared rem ote controller’s decoder system,realize a system with I NT0and I NT1of MCS-51single-chip com puter.The system has high com positive, and the program can be used by other micro controller only changing a little.KEY WORDS:MCS-51 keil c51 Interval of pulse Outer interrupt T imer/C ounter中图分类号:TP274文献标识码:B0 引 言红外遥控器可以通过非接触的方式实现对控制系统的操纵,不影响周边环境、不干扰其它电器设备,编解码容易,可进行多路遥控。
在一些比较恶劣的环境中使用遥控器,可以保护操作者的安全。
它设计简单、价格低廉,是一种应用很广的短程遥控系统。
而由于单片机的型号不同,所编的遥控器汇编语言程序也往往不同,可移植性差。
而c语言在这方面有汇编语言所没有的优势。
keil c51用c语言编写单片机程序,书写方便,易于开发出功能复杂的程序,有良好的开发环境,调试方便,可移植性强,出错率低,开发效率高。
基于单片机的红外遥控电子密码锁设计毕业设计论文论文终稿

基于单片机的红外遥控电子密码锁设计[摘要]:在日常的生活和工作中, 住宅与部门的安全防、单位的文件档案、财务报表以及一些个人资料的保存多以加锁的办法来解决。
本设计是基于51单片机设计的六位红外遥控密码锁,具有本机开锁遥控开锁,报警,工作状态液晶显示功能。
密码锁具有安全性高、成本低、功耗低、易操作等优点。
[关键词]:红外电子密码锁;报警;液晶显示;The Design of Infrared Remote Control Combination LockXiao peng(Grade 09,Class 3,Major electronics and information engineering ,the school of physics and telecommunications engineering,Shaanxi University of Technology,Hanzhong 723003,Shaanxi)Tutor:Zhu Yali[abstract]:In daily life and work, with department of housing security, unit documents, financial statements and some personal information using lock to save. This design is based on 51 single-chip with infrared remote control combination lock, with unlock the machine remote control lock, alarm and working status of liquid crystal display function. Combination lock with high safety, low cost, low power consumption, easy operation, etc.[Key words]:Infrared electronic combination lock;The alarm; Liquid crystal display (LCD);目录1 引言 (4)1.1 电子密码锁的背景与研究意义 (4)1.2 红外电子密码锁的现状及发展趋势 (5)1.3 课题研究方法 (6)2 红外通信原理 (6)2.1 红外的发射和接收 (6)2.1.1 编码解码 (7)2.1.2 调制 (8)2.1.3 解调接收 (8)3 硬件电路设计 (9)3.1 整系统框图 (9)3.2设计思想 (9)3.3 有关芯片的简介 (10)3.3.1 单片机AT89C51 (10)3.3.2存储芯片AT24C02介绍 (13)3.3.3 I2C总线介绍 (15)3.3.4 LCD1602 液晶显示 (17)3.3.5红外接收头 (20)3.4电路图的设计 (21)3.4.1 复位电路 (21)3.4.2 振荡电路 (22)3.4.3 继电器驱动电路 (22)3.4.4 24C02 (22)3.4.5 LCD 1602 (23)4 系统软件设计 (23)4.1 KEIL 软件的简介 (23)4.2 系统功能子程序 (24)4.2.1 数据读写模块 (24)4.2.2 红外发射接收模块 (24)4.2.5 主流程图 (29)5 电路仿真及调试 (30)5.1 报警电路 (30)5.2 显示电路 (30)5.3 开锁电路 (31)致 (32)参考文献 (33)附录A 外文资料翻译 (35)附录B 源程序 (45)附录C 电路图 (69)1 引言1.1电子密码锁的背景与研究意义在当今社会,安全防盗已成为社会问题,而锁自古以来就是防盗的重要工具,目前国大部分人使用的还是传统的机械锁,然而,眼下假冒伪劣的机械锁互开率非常之高,此外,即使是一把质量过关的机械锁,通过急开锁,甚至可以在不损坏锁的前提下将锁打开。
基于51单片机的红外遥控开关设计

2)数据存储器(RAM):片内为128B,片外最多可以外扩64KB。片内的128B的RAM以告诉RAM形式集成在单片机内。可以加快但单片机的运行速度,而且这种结果的RAM可以降低功耗。
2.方式1:当M1、M0为01是,定时器/计数器工作于方式1,这时定时器/计数器的等效电路如下图3-3
图3-3定时器/计数器方式1逻辑结构图
3方式2:
方式0和方式1的最大特点是计数溢出后,计数器为全0.因此在循环定时或循环计数用时就存在反复装入计数初值的问题。这不仅影响定时精数,而且也给程序设计带来麻烦。方式2就是针对此问题而设置的。当M1、M2为10时,定时器/计数器处于工作方式2,这时定时器/计数器得等效框图如图3-4所示。这种工作方式可以省去用户软件中得重装初值的程序,简化定时初值的计算方法,可以相当精确的确定定时时间。
3)程序存储器(ROM/EPROM):用来存储程序,8031没有此部件,8051为4KB的ROM;8751为4KB的EPROM。片外最多可以扩至64KB。
4)4个8位并行I/O口(P0、P1、P2、P3)
5)1个串行口:1个全双工的串行口,具有4种工作方式。可以用来进行串行通信,扩展并行I/O口,甚至与多个单片机相连接构成多机系统,从而使单片机的功能更加强且应用更广。
系统组成如图2-2所示【5】。系统由发射部分和接收部分组成。发射部分采用脉冲个数编码,将待发射信号调制成38KHz的载波信号,由红外发射管进行发射。接收部分由红外接收管进行解码接收,单片机通过对所接收信号的分析,输出相应的控制信号,由发光二极管和数码管指示出发射部分按下的按键号。
基于MCS51单片机的红外线解码系统设计

JNC TT
;如果为0就跳转到TT
MOV R4,#2
;延时1000微秒
Hale Waihona Puke D6:MOV R5,#248
DJNZ R5,$
DJNZ R4,D6
;检测到高电平1的话延时1毫秒等
待脉冲高电平结束
TT:
MOV A,@R1 ;将R1中地址的给A
RRC A
;将C中的值0或1移入A中的最低位
MOV @R1,A ;
DJNZ R3,SS ;接收满8位换一个内存
低成本、高可靠性、体积小、结构简单、避免人身伤害等优
点,是一种先进的控制方式,具有广阔的应用前景。
一、单片机解码程序设计
单片机在进行解码时,首先根据SM0038所传输过来的信号
判断是否有红外信号,若检测红外信号,则单片机产生中断,
进入中断处理程序,对红外线信号进行解码,单片机程序使用
汇编设计,采用查询方式确定是否有红外线信号,其解码查询
基于MCS51单片机的红外线解码系统设计
李春燕
(重庆市铜梁职业教育中心)
摘 要:本文通过对通用红外线遥控器编码系统的研究,
利用MCS51系列单片机对红外线进行解码,实现了红外线解码系
统,并利用单片机的串行通信接口与通用计算机进行通信,实
现了计算机上位机显示软件的设计。
关键词:MCS-C51 红外线 解码 串行通信
INC R1
;对R1中的值加1,换下一个RAM
DJNZ R2,PP ;接收完所有数据
EXIT:
#pragma endasm
上位机程序设计
上位程序使用微软基于.NET的新一代程序设计语言C#(读
作C SHARP),该语言是一种安全的语言,具有内存自动回收功
一种基于单片机的红外遥控软件解码方法

低脉冲的时间是0.565,间隔0.56为0,低脉冲的时间是0.565,间隔为1.685的为1在开始时是9MS的高脉冲间隔4.5的低脉冲后经过接收的取反后就为9MS的低脉冲间隔为4.5的高脉冲了!一种基于单片机的红外遥控软件解码方法摘要:文章详细论述了红外遥控数据的调制与编码方式,设计了一种基于MCS- 51单片机的红外遥控解码方案,并简要介绍了红外通信抗十扰措施并给出软件设计实例。
关键词:单片机红外遥控编码解码ABSTRACT: This paper mainly discuss the cx>ncx>ct and cx>ding method of infrared remote control, and the d,-sign of decode system base on the MCS一51 singlachip is put forward; at the scone tune a brief introduction of resist-ing inten}erence of software and an example is given。
KEYWORDS: Singlechip Infrared remote cx>ntrol Coding Decx>de 0引言红外线遥控是日前使用广泛的一种通信和遥控乎段。
由于红外线遥控装置具有体积小、功耗低、功能强J戊本低等特点广泛应用于各种家用电器产品。
市场上的各种家电红外遥控系统技术成熟、成本低廉,但都是针对各自的遥控对象(彩电、冰箱、空调等),为了能将性能稳定价格低廉、功能较多的电视机遥控器应用于其它控制场合,本文以MCS- 51单片机W78E58为核心,设计了一套红外遥控信号解码的软件系统,通过驱动电路的扩展,能使智能仪器实现功能较复杂的遥控控制。
1红外遥控的基本组成和接收解码电路红外遥控系统一般由红外遥控信号发射器、红外遥控信号接收器和微控制器及其外围电路3部分组成,如图1所示:、当遥控信号发射器的某个按键被按下,其内部的信号发射器就产生遥控编码脉冲,经载波调制后由红外发射竹串行输出;遥控接收头完成对遥控信号的接收放大、检波、整形、再送给微控制器,由微控制器解调出编码脉冲并执行相应的遥控功能。
(完整版)基于51单片机智能红外遥控器的设计毕业设计
青岛农业大学毕业论文(设计)任务书论文(设计)题目简易智能红外遥控器的设计要求完成时间论文(设计)内容(需明确列出研究的问题):本设计要求设计一简易智能红外遥控器,需要解决以下问题:1、熟悉红外遥控器的工作原理;2、掌握红外通信的编解码原理及至少一种串行通信数据校验算法;3、实现一个遥控器对至少2台家电设备的控制;4、绘制系统电气原理图及PCB图;5、画出系统的软件流程图并编写系统程序;6、尽量做出样机并完成系统调试。
资料、数据、技术水平等方面的要求:1、查阅至少10篇以上与课题相关资料,至少有两篇是英文文献;2、原理图的绘制要求规范;3、绘制系统PCB图;4、编写并调试系统程序;5、完成实物演示;6、独立完成论文;7、论文要求打印。
指导教师签名:年月日毕业论文(设计)原创性声明本人所呈交的毕业论文(设计)是我在导师的指导下进行的研究工作及取得的研究成果。
据我所知,除文中已经注明引用的内容外,本论文(设计)不包含其他个人已经发表或撰写过的研究成果。
对本论文(设计)的研究做出重要贡献的个人和集体,均已在文中作了明确说明并表示谢意。
作者签名:日期:毕业论文(设计)授权使用说明本论文(设计)作者完全了解**学院有关保留、使用毕业论文(设计)的规定,学校有权保留论文(设计)并向相关部门送交论文(设计)的电子版和纸质版。
有权将论文(设计)用于非赢利目的的少量复制并允许论文(设计)进入学校图书馆被查阅。
学校可以公布论文(设计)的全部或部分内容。
保密的论文(设计)在解密后适用本规定。
作者签名:指导教师签名:日期:日期:注意事项1.设计(论文)的内容包括:1)封面(按教务处制定的标准封面格式制作)2)原创性声明3)中文摘要(300字左右)、关键词4)外文摘要、关键词5)目次页(附件不统一编入)6)论文主体部分:引言(或绪论)、正文、结论7)参考文献8)致谢9)附录(对论文支持必要时)2.论文字数要求:理工类设计(论文)正文字数不少于1万字(不包括图纸、程序清单等),文科类论文正文字数不少于1.2万字。
(完整版)基于51单片机的电器遥控设计毕业论文设计
1基于51单片机的电器遥控设计毕业论文 .txt49礁石因为信念坚定,才激起了美丽的浪花;青春因为追求崇高,才格外地绚丽多彩。
50因为年轻,所以自信;因为自信, 所以年轻。
本文由bigpanda20088贡献doc 文档可能在WAF 端浏览体验不佳。
建议您优先选择TXT ,或下载源文件到本 机查看。
目录…… 一 总体设计方案 ……4……1利用红外遥控开关电路 ……4……二系统硬件电路设计 ……5 1.2显示器件选择 ……6 1.3调光器件选择 ……6 1.4按键控制方式选择 ……6 2.电路设计: ……2.电路设计: ……7电路设计2.1 .发射电路部分 ……7 2.2 .接收电路部分 ……10 2.3.系统功能实现方法 ……2.3.系统功能实现方法 ……11 2.3.1 .遥控码的编码格式 ……11 2.3.2 .遥控码的发射 ……12 2.3.3 .数据帧的接收处理 ……12 2.4.遥控发射及接收控制电路的软件设计2.4.遥控发射及接收控制电路的软件设计……13 2.4.1 遥控发射部 分: ……13 2.4.2 遥控接收部分:……15…… 三 设计调试 ……16调试步骤:…… 调试步骤:……16…… 四 结束语 ……19附录(参考文献及计算机程 序清单) …… 附录(参考文献及计算机程序清单)……20参考文献: …… 参 考文献: ……20…… 程序清单 ……21 摘要随着电子科学技术的发展,遥控遥测技术在高科技研究、工农业生产、通信1术、军事技术、家用电器等诸多领域得到了广泛地应用。
特别是随着各类遥控专用集成电路不断问世,使得各类遥控设备的性能更加优越、可靠,功能也更加完善。
该系统设计主要是围绕红外遥控的相关理论和应用进行研究。
该遥控装置采用晶体稳频脉冲调幅发射机,电路较简单,频率稳定度高,发射的是间断的28MHZ 等幅载波。
接收机采用自熄式超再生检波方式,检波级工作在非线性工作状态,具有间歇高频振荡和检波双重功能,接收灵敏度较高。
51单片机中 做红外遥控密码锁的课题论文毕业论文

51单片机中做红外遥控密码锁的课题论文毕业论文1.1 课题背景及目的电子技术的飞速发展,给古老的锁具生产带来了巨大的变革,现代的电子技术与机械技术相结合,产生了一大批如声控锁、磁控锁、密码锁、遥控锁,指纹锁等先进的锁具。
目前国外密码锁系统的主要方向的发展是:接触式密码锁系统,非接触式密码锁系统,智能识别密码锁系统,但是他们都相应的存在着不同的缺点。
例如:接触式密码锁系统成本较低,体积小,卡片本身无须电源,但使用不太方便,而且有接触磨损。
相比之下,红外遥控密码锁系统的成本与接触式密码锁系统相当,而且可以进行近距离遥控,使用十分方便。
而且它已经与 PC 机的数据库相结合,可以组成一套酒店房间的门禁管理系统。
由于红外遥控具有许多优点,例如红外线发射装置采用红外发光二极管遥控发射器易于小型化且价格低廉;采用数字信号编码和二次调制方式,不仅可以实现多路信息的控制,增加遥控功能,提高信号传输的抗干扰性,减少误动作,而且功率消耗低;红外线不会向室外泄露,不会产生信号串扰;反应速度快、传输效率高、工作稳定可靠等。
工业设备中,在高压、辐射、有毒气体、粉尘等环境下,采用红外线遥控不仅完全可靠而且能有效地隔离电气干扰。
所以红外线遥控是目前使用最广泛的一种通信和遥控手段。
在本设计中,红外遥控密码锁和 PC 机、数据库相结合,能够实现适时的、强大的管理,使得整个红外遥控系统得到更好的完善。
1.2 国外研究现状目前大部分的锁采用的都是机械式的,其最大的缺点是利用简单工具就能很容易地把锁打开。
针对这种情况,我们设计了一种红外遥控密码锁,而一般设备都采用专用的遥控编码及解码集成电路,其制作简单、容易,但由于特定功能的限制,只适用于专用的电器产品,其应用围受到限制。
而设计的红外遥控密码锁系统能提高门禁系统的可靠性和安全性,适应市场需要。
该系统具有普通电子密码锁功能的同时,还增加了遥控功能。
该系统具有较强的实际应用价值,所涉及的技术包括:红外载波数据传输技术、单片机控制技术、红外遥控系统编码及译码技术、电路设计与演示板制作技术等。
基于51单片机的红外遥控开关设计初稿

本次设计是基于单片机的红外遥控开关系统,它在我们的生产和生活中有着很广泛的应用前景。在我们所居住的场所,我们就可以通过红外遥控技术来控制各种电器、仪表、机械等。这种系统具有很强的适用性、灵活性、先进性。它的应用将我们的生活变的更加轻松。大大方便了人们的生活随着信息技术的不断向前发展,一些功能更强的应用系统将出现在我们的各个方面,这将体现着高科技带给人们的无穷魅力。
2.方式1:当M1、M0为01是,定时器/计数器工作于方式1,这时定时器/计数器的等效电路如下图3-3
图3-3定时器/计数器方式1逻辑结构图
3方式2:
方式0和方式1的最大特点是计数溢出后,计数器为全0.因此在循环定时或循环计数用时就存在反复装入计数初值的问题。这不仅影响定时精数,而且也给程序设计带来麻烦。方式2就是针对此问题而设置的。当M1、M2为10时,定时器/计数器处于工作方式2,这时定时器/计数器得等效框图如图3-4所示。这种工作方式可以省去用户软件中得重装初值的程序,简化定时初值的计算方法,可以相当精确的确定定时时间。
定时器/计数器T0由特殊功能寄存器TH0、TL0构成,定时器/计数器T1由特殊功能寄存器T1、TL1构成。特设功能寄存器TMOD用于选择定时器/计数器T0、T1得工作模式和工作方式。特殊功能寄存器TCON用于控制T0、T1得启动和停止计数,同时包含了T0、T1得状态。TMOD、TCON这两个寄存器得内容由软件设置。单片机复位时,两个寄存器得所有位都被清0。
AT89C51芯片内部具有下列硬件资源:4KB闪速存储器、128个字节RAM、32条I/O线,两个16位定时/计数器、五源两级终端结构、全双工串行口、片内振荡器及时钟电路等。
正是由于AT89C51具有以上优点,所以我选择了它作为系统硬件所选单片机类型。
基于51单片机红外计数器设计(毕业论文)

红外线自动计数器的设计摘要随着今社会的飞速发展,越来越多的流水线上的产品和各种公共场所需要进行自动计数。
基于单片机构成的产品自动计数器有直观和计数精确的优点,目前已在各种行业中得到广泛应用。
数字计数器有多种形式,总体来说有接触式和非接触式两种,在科技发展的今天,非接触式红外计数器得到了广泛的应用。
本设计采用一对红外发射接收管作为红外计数器的信号检测头,具有价格低廉,抗干扰性好,结构简单,操作方便等特点。
指导思想是利用红外发光管发射红外线,红外接收管接收此红外线,并将其放大、整流形成低电平信号.当有人或物挡住红外光时,接收管没有接收到红外信号,放大器将输出高电平,同时将这个电平信号送入单片机进行控制计数,并且使数码管显示数值。
这样就得到要统计的人或物的数量。
关键字:自动计数;单片机;数码管目录第一章绪论 (4)1.1、前言 (4)1.2、选题背景 (4)1.3、设计要求 (5)1.4、国内外的研究概况 (5)1.5、此次设计研究的主要内容应解决问题 (5)第二章基于单片机构成的产品自动计数器的设计 (6)2.1、方案论证与选择 (6)2.2、系统总体框图和原理 (8)2.3、系统单元电路设计 (9)2.3.1、电源供电电路 (9)1. 桥式整流电路: (10)虑波电路分析 (11)稳压电路 (12)2.3.2、红外线检测部分 (13)2.3.3、数码管显示部分 (14)2.3.3.1、LED数码管的特点: (15)2.3.3.2、数码管动态扫描....... 错误!未定义书签。
2.3.3.3、数码管驱动部分 (16)2.3.3.4、单片机计数及控制部分 (17)复位电路 (21)复位电路的分类 (21)3.4、系统程序设计 .................. 错误!未定义书签。
3.4.1、程序流程图................ 错误!未定义书签。
3.4.2、程序设计 .................... 错误!未定义书签。
基于51单片机的红外遥控

基于51单片机的红外遥控本讲内容:介绍红外遥控的知识,通过例程展示红外遥控程序的编写方法。
红外线简介:在光谱中波长自760nm至400um的电磁波称为红外线,它是一种不可见光。
目前几乎所有的视频和音频设备都可以通过红外遥控的方式进行遥控,比如电视机、空调、影碟机等,都可以见到红外遥控的影子。
这种技术应用广泛,相应的应用器件都十分廉价,因此红外遥控是我们日常设备控制的理想方式。
接收头输出的波形正好和遥控芯片输出的相反。
在这里红外通信采用NEC协议,它的特征如下:信号调制红外遥控信号接收管接口电路:红外信号发射电路 红外信号接收电路例程:红外遥控信号发射:/*****************红外通信——发射*******************单片机型号:STC89C52RC*开发环境:KEIL*名称:红外通信发射*功能:按下按键S4,S5,S6,S8,S9,S10,S11,S13,S14发射对应键值,可以与红外通信——接收程序配套使用***************************************************/#include <REG51.h>#include <intrins.h>#define uchar unsigned char#define uint unsigned int#define SBM 0x80 //识别码#define m9 (65536-8294) //约9mS#define m4_5 (65536-4147) //约4.5mS#define m1_6 (65536-1521) //约1.65mS#define m_65 (65536-599) //约0.65mS#define m_56 (65536-516) //约0.56mS#define m40 (65536-36864) //约40mS#define m56 (65536-51610) //56mS#define m2_25 (65536-2074) //约2.25mSconst uchar TabHL1[9]={0x0c,0x18,0x5e,0x08,0x1c,0x5a,0x42,0x52,0x4a};sbit IR=P1^5; //定义发射引脚sbit BEEP=P2^3;void keyscan();void ZZ(uchar x);void Z0(uchar temp);void TT0(bit BT,uint x);void delay(int In,int Out);/*┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈函数功能:主函数┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈/ void main(void){TMOD=0x01; //T0 16位工作方式IR=1; //发射端口常态为高电平while(1){keyscan();}}/*┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈函数功能:发送主程序┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈/ void ZZ(uchar x){TT0(1,m9); //高电平9mSTT0(0,m4_5); //低电平4.5mS/*┈发送4帧数据┈*/Z0(SBM);Z0(~SBM);Z0(x);Z0(~x);/*┈┈结束码┈┈*/TT0(1,m_65);TT0(0,m40);}/*┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈函数功能:单帧发送程序入口参数:1帧数据┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈/ void Z0(uchar temp){uchar v;for (v=0;v<8;v++) //循环8次移位{TT0(1,m_65); //高电平0.65mSif(temp&0x01) TT0(0,m1_6); //发送最低位else TT0(0,m_56);temp >>= 1; //右移一位}}/*┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈函数功能:38KHz脉冲发射 + 延时程序入口参数:(是否发射脉冲,延时约 x (uS))┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈/void TT0(bit BT,uint x){TH0=x>>8; //输入T0初始值TL0=x;TF0=0; //清0TR0=1; //启动定时器0if(BT==0)while(!TF0);//BT=0时不发射38KHz脉冲只延时;BT=1发射38KHz脉冲且延时;else while(1) //38KHz脉冲,占空比5:26{IR = 0;if(TF0)break;if(TF0)break;IR=1;if(TF0)break;if(TF0)break;if(TF0)break;if(TF0)break;if(TF0)break;if(TF0)break;if(TF0)break;if(TF0)break;if(TF0)break;if(TF0)break;}TR0=0; //关闭定时器0TF0=0; //标志位溢出则清0IR =1; //脉冲停止后,发射端口常态为高电平}void keyscan() //按键扫描函数{uchar buffer;/***************************************************/P3=0xfe; //扫描S3,S4,S5,S6;buffer=P3;buffer=buffer & 0xf0;if(buffer!=0xf0){delay(5,10);if(buffer!=0xf0){buffer=P3;switch(buffer){case 0xee:{;}break;case 0xde:{ZZ(TabHL1[0]);}break;case 0xbe:{ZZ(TabHL1[1]);}break;case 0x7e:{ZZ(TabHL1[2]);}break;}while(buffer != 0xf0){buffer=P3;buffer=buffer&0xf0;BEEP=0;}BEEP=1;}}/****************************************************/ P3=0xfd; //扫描S8,S9,S10,S11buffer=P3;buffer=buffer & 0xf0;if(buffer!=0xf0){delay(5,10);if(buffer!=0xf0){buffer=P3;switch(buffer){case 0xed:{ZZ(TabHL1[3]);}break;case 0xdd:{ZZ(TabHL1[4]);}break;case 0xbd:{ZZ(TabHL1[5]);}break;case 0x7d:{ZZ(TabHL1[6]);}break;}while(buffer!=0xf0){buffer=P3;buffer=buffer&0xf0;BEEP=0;}BEEP=1;}}/****************************************************/ P3=0xfb; //扫描S13,S14,S15,S16buffer=P3;buffer=buffer&0xf0;if(buffer!=0xf0){delay(5,10);if(buffer!=0xf0){buffer=P3;switch(buffer){case 0xeb:{ZZ(TabHL1[7]);}break;case 0xdb:{ZZ(TabHL1[8]);}break;}while(buffer!=0xf0){buffer=P3;buffer=buffer&0xf0;BEEP=0;}BEEP=1;}}}void delay(int In,int Out) //定义延时函数{int i,j;for(i=0;i<In;i++){for(j=0;j<Out;j++){;}}}红外遥控信号接收:/*****************红外通信--接收*******************单片机型号:STC89C52RC*开发环境:KEIL*功能:在液晶LCD1602上显示接收到的数值*************************************************/#include<reg52.h>#define LCD_Data P0#define Busy 0x80sbit IR=P3^2;sbit LCD_RS=P1^0;sbit LCD_RW=P1^1;sbit LCD_E=P2^5;void TIM0init(void);void EX0init(void);void SYSinit(void);void delay(int In,int Out);void Delay5Ms(void);void Ir_work(void);void Ircordpro(void);void WriteDataLCD(unsigned char WDLCD);void WriteCommandLCD(unsigned char WCLCD,BuysC);unsigned char ReadDataLCD(void);unsigned char ReadStatusLCD(void);void LCDInit(void);void DisplayOneChar(unsigned char X,unsigned char Y,unsigned char DData);void DisplayListChar(unsigned char X,unsigned char Y,unsigned char code *DData); void Info_display(void);bit IRpro_ok;bit IR_ok;unsigned char IRcord[4];unsigned char IRdata[33];unsigned char codedofly_DuanMa[10]={0x3f,0x06,0x5b,0x4f,0x66,0x6d,0x7d,0x07,0x7f,0x6f};unsigned char irtime;unsigned char speed_num=0;unsigned char codemb_table[]={0x3f,0x06,0x5b,0x4f,0x66,0x6d,0x7d,0x07,0x7f,0x6f,0x77,0x7c,0x39,0x5e,0x79,0x71};unsigned char code welcome[]={"YOU ARE WELCOME"};unsigned char code ir_reve[]={"IR_RECEIVE: "};/*******************5ms延时函数*********************/void Delay5Ms(void){unsigned int TempCyc=3552;while(TempCyc--);}void delay(int In,int Out){int i,j;for(i=0;i<In;i++){for(j=0;j<Out;j++){;}}}/***********************写数据函数***********************/ void WriteDataLCD(unsigned char WDLCD){ReadStatusLCD();LCD_Data=WDLCD;LCD_RS=1;LCD_RW=0;LCD_E=0;LCD_E=0;LCD_E=1;}/**********************写指令函数************************/ void WriteCommandLCD(unsigned char WCLCD,BuysC){if(BuysC)ReadStatusLCD();LCD_Data=WCLCD;LCD_RS=0;LCD_RW=0;LCD_E=0;LCD_E=0;LCD_E=1;}/***********************读状态函数************************/ unsigned char ReadStatusLCD(void){LCD_Data=0xFF;LCD_RS=0;LCD_RW=1;LCD_E=0;LCD_E=0;LCD_E=1;while(LCD_Data & Busy);return(LCD_Data);}/************************LCD初始化************************/ void LCDInit(void){LCD_Data=0;WriteCommandLCD(0x38,0);Delay5Ms();WriteCommandLCD(0x38,0);Delay5Ms();WriteCommandLCD(0x38,0);Delay5Ms();WriteCommandLCD(0x38,1);WriteCommandLCD(0x08,1);WriteCommandLCD(0x01,1);WriteCommandLCD(0x06,1);WriteCommandLCD(0x0C,1);}/*******************按指定位置显示一个字符******************/void DisplayOneChar(unsigned char X,unsigned char Y,unsigned char DData){Y&=0x1;X&=0xF;if(Y)X|=0x40;X|=0x80;WriteCommandLCD(X,0);WriteDataLCD(DData);}/*******************按指定位置显示一串字符******************/void DisplayListChar(unsigned char X,unsigned char Y,unsigned char code *DData) {unsigned char ListLength;ListLength=0;Y&=0x1;X&=0xF;while(DData[ListLength]>=0x20){if(X<=0xF){DisplayOneChar(X,Y,DData[ListLength]);ListLength++;X++;}}}/***********************定时器0初始化***********************/void TIM0init(void){TMOD=0x02;TH0=0x00;TL0=0x00;ET0=1;TR0=1;}/**********************外部中断0初始化**********************/void EX0init(void){IT0=1;EX0=1;EA=1;}/*************************系统初始化*************************/void SYSinit(void){TIM0init();EX0init();LCDInit();}/********************红外信号接收相关函数********************/void Ir_work(void){switch(IRcord[2]){case 0x0C:{DisplayOneChar(12,1,0x31);}break;case 0x18:{DisplayOneChar(12,1,0x32);}break;case 0x5e:{DisplayOneChar(12,1,0x33);}break;case 0x08:{DisplayOneChar(12,1,0x34);}break;case 0x1c:{DisplayOneChar(12,1,0x35);}break;case 0x5a:{DisplayOneChar(12,1,0x36);}break;case 0x42:{DisplayOneChar(12,1,0x37);}break;case 0x52:{DisplayOneChar(12,1,0x38);}break;case 0x4a:{DisplayOneChar(12,1,0x39);}break;default:break;}}void Ircordpro(void){unsigned char i,j,k;unsigned char cord,value;k=1;for(i=0;i<4;i++){for(j=1;j<=8;j++){cord=IRdata[k];if(cord>7)value|=0x80;if(j<8){value>>=1;}k++;}IRcord[i]=value;value=0;}IRpro_ok=1;}/********************红外信号接收相关函数********************/ void main(void){SYSinit();delay(5,100);DisplayListChar(0,0,welcome);DisplayListChar(0,1,ir_reve);while(1){if(IR_ok){Ircordpro();IR_ok=0;}if(IRpro_ok){Ir_work();}}}/********************定时器0中断处理函数********************/ void tim0_isr (void) interrupt 1 using 1{irtime++;}/*******************外部中断0中断处理函数*******************/ void EX0_ISR (void) interrupt 0{static unsigned char i;static bit startflag;if(startflag){if(irtime<63&&irtime>=33)i=0;IRdata[i]=irtime;irtime=0;i++;if(i==33){IR_ok=1;i=0;}}else{irtime=0;startflag=1;}}。
(完整版)基于51单片机的红外遥控器解码设计毕业论文
第1章红外解码系统分析第1节设计要求整个控制系统的设计要求:被控设备的控制实时反应,从接收信号到信号处理及对设备控制反映时间应小于1s;整个系统的抗干扰能力强,防止误动作;整个系统的安装、操作简单,维护方便;成本低。
红外载波、编码电路设计要求:单片机定时器精确产生38KHz红外载波;根据控制系统要求能对红外控制指令信号精确编码并迅速发送。
红外解码电路设计要求:精确接收红外信号,并对所接收信号进行解码、放大、整形、解调等处理,最后输出TTL电平信号;对非红外光及边缘红外光抗干扰能力强。
设备扩展模块设计要求:直流控制交流;抗干扰能力强;反应迅速不产生误动作;能承受大电流冲击。
第2节总体设计方案2.1 方案论证驱动与开关方案一:采用晶闸管直接驱动。
其优点是体积小,电路简单,外围元件少。
但控制电流小,大电流晶闸管成本高,并且隔离性能差。
方案二:采用三极管驱动继电器。
其体积大,外围元件多。
优点是控制电流大,隔离性能好。
根据实际情况,拟采用方案二。
2.2 总体设计框图经过上述方案的分析选择,得出系统硬件由以下几部分组成:电视红外遥控器,51单片机最小系统,接收放大于一体集成红外接收头,1602液晶显示驱动电路。
整体设计思路为:根据扫描到不同的按键值转至相对应的ROM表读取数据。
确认设备及菜单选择键后AT89S2将从ROM读取出来的值,按照数据处理要求从P2.5输出控制脉冲与T0产生的38KHz的载波(周期是26.3μs)进行调制,经NPN三极管对信号放大驱动红外发光管将控制信号发送出去。
红外数据接收则是采用HS0038一体化红外接收头,内部集成红外接收、数据采集、解码的功能,只要在接收端INT0检测头信号低电平的到来,就可完成对整个串行的信号进行分析得出当前控制指令的功能。
然后根据所得的指令去操作相应的用电器件工作,如图1-1所示。
图1-1 电路设计整体框图第2章红外解码硬件电路设计第1节单片机及其硬件电路设计1.1 单片机的介绍AT89S52是一种低功耗、高性能CMOS8位微控制器,具有8K 在系统可编程Flash 存储器。
基于51单片机的红外遥控设计-毕业设计论文
摘要很多电器都采用红外遥控,那么红外遥控的工作原理是什么呢?本文将介绍其原理和设计方法。
红外线遥控就是利用波长为0.76~1.5μm之间的近红外线来传送控制信号的。
常用的红外遥控系统一般分发射和接收两个部分。
红外遥控常用的载波频率为38kHz,这是由发射端所使用的455kHz晶振来决定的,在发射端要对晶振进行整数分频,分频系数一般取12,所以455kHz÷12≈37.9 kHz≈38kHz。
也有一些遥控系统采用36kHz、40kHz、56kHz等,一般由发射端晶振的振荡频率来决定。
接收端的输出状态大致可分为脉冲、电平、自锁、互锁、数据五种形式。
“脉冲”输出是当按发射端按键时,接收端对应输出端输出一个“有效脉冲”,宽度一般在100ms左右。
一般情况下,接收端除了几位数据输出外,还应有一位“数据有效”输出端,以便后级适时地来取数据。
这种输出形式一般用于与单片机或微机接口。
除以上输出形式外,还有“锁存”和“暂存”两种形式。
所谓“锁存”输出是指对发射端每次发的信号,接收端对应输出予以“储存”,直至收到新的信号为止;“暂存”输出与上述介绍的“电平”输出类似。
关键词:80c51单片机、红外发光二极管、晶振目录第一章1、引言 (3)2、设计要求与指标 (3)3、红外遥感发射系统设计 (4)4、红外发射电路设计 (4)5、调试结果及分析 (9)6、结论 (10)第二章1、引言 (10)2、设计要求与指标 (11)3、红外遥控系统设计 (11)4、系统功能实现方法 (15)5、红外接收电路 (16)6、软件设计 (17)7、调试结果及分析 (18)8、结论 (19)参考文献附录绪论人的眼睛能看到的可见光按波长从长到短排列,依次为红、橙、黄、绿、青、蓝、紫。
其中红光的波长范围为0.62~0.76μm;紫光的波长范围为0.38~0.46μm。
比紫光波长还短的光叫紫外线,比红光波长还长的光叫红外线。
红外线遥控就是利用波长为0.76~1.5μm之间的近红外线来传送控制信号的。
51单片机-毕业设计基于单片机设计的红外线遥控器
从光学的角度而言,红外光是频率低于红色光的不可见光,在无线光谱的整个频率中占有很小一个频率段,波长为0.75—100微秒之间,其中0。75—3微秒之间的红外光称为近红外,3—30微秒之间的红外光称为中红外,30—100微秒之间的称为远红外。红外光就其性质而言很简单,与普通光线的频率特性没有很大的区别,但是,由于任何有热量的物体均有能量产生,所以红外的利用非常广泛,而且不可取代,能否检测红外、能测到多少红外或者红外检测的技术是否可以应用于任何自然的或想象的场合是红外应用技术的关键.
四、主要参考文献:
[1]梅丽凤,王艳秋,张军等。单片机原理及接口技术,北京:清华大学出版社,2004年。
[2]戴峻峰,付丽辉。多功能红外线遥控器的设计,传感器世界。2002,8(12):16~18.
[3]李光飞,楼然苗,胡佳文等.单片机课程设计实例指导,北京:北京航空航天出版社,
2004年.
[4]苏长赞。红外线与超声波遥控,北京:人民邮电出版社.1995年.
3.4独立式按键结构……………………………………………………………10
3。5掉电保护与低功耗设计……………………………………………………10
3。5.1低功耗的实现方法……………………………………………………10
3。5.2掉电保护与低功耗设计………………………………………………11
3。6系统完整电路设计图………………………………………………………13
2010.6。26~2010。8.10
在老师指导下反复修改,完成设计
五、指导教师意见:
指导教师签名:2010年5月10日
六、系部意见:
系主任签名:2010年5月11日
基于单片机的红外线遥控器
摘要
51单片机红外的遥控解码程序的编写
51单片机红外的遥控解码程序的编写下面把这次红外编程的解码的经历简要的写一下,以便以后回顾总结:红外遥控过程是这样的:红外遥控器的矩阵键盘按键,接着专用芯片编码调制然后红外发射;红外接受头经过光电放大,解调,最后解码编程。
我的遥控专用芯片是UPD6122G-001.解码晶振是455kHz,调制载波频率是455kHz/12=38kHz。
此外调制信号是PWM进行调制的,0是脉冲波形位0.5625ms的高电平跟0.5625ms的低电平组成,1则是0.5625ms的高电平跟1.6785ms的低电平组成。
跟其他通用的波形一样,有键按下时,先是9ms的高电平的起始码,接着是一个4.5ms结果码,接下来就是数据了。
用户码的高8位,用户码的低8位,8位数据码,8位数据反码,最后还有一个停止位。
如果按键一直没松,则接下来就只是发送起始码(9ms高电平),接着是一个2.2ms的低电平,再接着是一个停止位。
我的红外接在单片机p3.7引脚上面,从网上收集了一些程序,基本上如同一则,汇编编写,跟外部中断还有关系。
于是便萌生了自己写一下的想法。
我的思路是用定时器进行计数,然后编程。
刚开始编写程序是,由于忘了对定时器的标志位进行置为,结果定时中断根本就没有执行,手头上又没有用仿真芯片,搞得我下载调试了十来次才发现了这个问题。
还有一个问题刚开始遥控能够解码的时候,可是一直按某个键,你按一次,她就变化一次,搞得我很是郁闷,差点儿没晕过去。
怎么找都不知道问题的所在,心里不断地打算放弃,不过最后还是坚持了下来,原来电路的实际解码电平跟资料上是相反的。
遥控器的实际电平由高变低,而电路板上却是由低变高。
这点确好相反。
总结:一要自信,二要坚持,才有可能完成你想做的事件。
#include"reg51.h"#include"2-16.h"#include"address.h"//需要显示的信息uchar code hello[] = "Hello,PengSen!";//变量uchar data psCount; //定时器计数器uchar data i;uchar data j;uchar data temp;uchar data dp[4]; //用来保存红外遥控的码值uchar data dp2[12];//用来显示红外遥控的码值sbit HW = P3^7;void delay(unsigned int y);void main(){//初始化initlcd();dp[0] = 0x0;dp[1] = 0x0;dp[2] = 0x0;dp[3] = 0x0;TMOD = 0x11; // 定时器0, 1工作模式1, 16位定时方式TH1 = 0xfe; //定时500uSTL1 = 0x33;TCON = 0x01;IE = 0x80;TR1 = 1;printf(hello,13);while(1){//报文头ET1 = 0;psCount = 0;while(HW == 1); //初始状态下,红外输出脚一直是高电平,等待遥控按键ET1 = 1;while(HW == 0);if( psCount > 17)//0.5* 17 = 8.5ms约为9.0ms{ET1 = 0;psCount = 0;ET1 = 1;while(HW == 1);if(psCount > 5)//超过0.5*5 = 2.5毫米,检查一下遥控命令是不是连发,不是则执行下面的程序{ET1 = 0;psCount = 0;dp[0] = 0x0;dp[1] = 0x0;dp[2] = 0x0;dp[3] = 0x0;//数据for(i = 0 ; i < 4; i++){for(j = 0; j < 8; j++){while(HW == 0);ET1 = 0;psCount = 0;ET1 = 1;while(HW == 1);if(psCount > 2)//根据波形长度判定码值为0或1temp = 0;elsetemp = 1;dp[i] |= (temp<<="">}}}}//停止位while(HW == 1);//数据显示delay(20);dp2[0] = dp[0]/100 + 0x30;dp2[1] = dp[0]%100/10 + 0x30;dp2[2] = dp[0]%10 + 0x30;dp2[3] = dp[1]/100 + 0x30;dp2[4] = dp[1]%100/10 + 0x30;dp2[5] = dp[1]%10 + 0x30;dp2[6] = dp[2]/100 + 0x30;dp2[7] = dp[2]%100/10 + 0x30; dp2[8] = dp[2]%10 + 0x30; dp2[9] = dp[3]/100 + 0x30;dp2[10] = dp[3]%100/10 + 0x30; dp2[11] = dp[3]%10 + 0x30; printf(dp2,12);delay(20);}}//延时子程序void delay(unsigned int y){uchar x;for(;y!=0;y--)for(x=200;x!=0;x--); }//定时器1中断void timer1() interrupt 3 {psCount++;TH1 = 0xfe; //定时500uS TL1 = 0x33;}。
基于51单片机的红外遥控

基于51单片机的红外遥控红外遥控是无线遥控的一种方式,本文讲述的红外遥控,采用STC89C52单片机,1838红外接收头和38k红外遥控器。
1838红外接收头:红外遥控器:原理:红外接收的原理我不赘述,百度文库上不少,我推荐个网址,这篇文章写得比较清楚,也比较全面,http://wenku.baidu.com/view/c353e8360b4c2e3f57276349.html 我主要讲下程序的具体意思,在了解原理的基础上,我们知道,当我们在遥控器上每按下一个键,遥控器上的红外发射头都会发出一个32位的编码(32位编码分成4组8位二进制编码,前16位为用户码和用户反码,后16位为数据码和数据反码,用户码表示遥控器类型,数据码表示按键编码),不同的键对应不同的编码,红外接收头接收到这个编码后,发送给单片机,再进行相关操作。
源程序1:(这个程序的功能是将用户码和用户反码,数据码和数据反码显示在1602液晶上,因为遥控器买回来是不会说明按键对应什么码值,所以先自己测试,确定每个按键的码值)#include<reg52.h>#include<stdio.h>#include<intrins.h>#defineuint unsigned int#define uchar unsigned char#define _Nop() _nop_()#defineTURE 1#defineFALSE 0/*端口定义*/sbit lcd_rs_port=P3^5;/*定义LCD控制端口*/sbit lcd_rw_port = P3^6;sbit lcd_en_port= P3^4;#define lcd_data_portP0///////////////////////////////////void delay1(void)//关闭数码管延时程序{ﻩint k;ﻩfor (k=0; k<1000;k++);}////////////////////////////////////uchar codeline0[16]={"user:"};uchar codeline1[16]={"data:"};uchar code lcd_mun_to_char[16]={"0123456789ABCDEF"};unsigned charirtime;//红外用全局变量bitirpro_ok,irok;unsigned charIRcord[4];//用来存放用户码、用户反码、数据码、数据反码unsigned char irdata[33];//用来存放32位码值void ShowString(unsigned charline,char *ptr);//////////////////////////////////////////////void Delay(unsigned char mS);void Ir_work(void);voidIrcordpro(void);void tim0_isr(void)interrupt 1using 1//定时器0中断服务函数{ﻩirtime++;}void ex0_isr (void) interrupt0using0//外部中断0服务函数{ﻩstatic unsigned char i;static bitstartflag;ﻩif(startflag){ﻩif(irtime<63&&irtime>=33)//引导码TC9012的头码i=0;irdata[i]=irtime;irtime=0;i++;if(i==33){ﻩﻩirok=1;ﻩﻩi=0;ﻩﻩ}ﻩ}ﻩelse{ﻩirtime=0;startflag=1;ﻩﻩ}}voidTIM0init(void)//定时器0初始化{TMOD=0x02;//定时器0工作方式2,TH0是重装值,TL0是初值ﻩTH0=0x00;//reload valueﻩTL0=0x00;//initial valueET0=1;//开中断ﻩTR0=1;}void EX0init(void){ﻩIT0= 1; // Configure interrupt 0for falling edge on/INT0 (P3.2)EX0 =1; // EnableEX0 InterruptﻩEA=1;}void Ircordpro(void)//红外码值处理函数(关键函数){ﻩunsignedchari, j, k=1;unsignedchar cord,value;for(i=0;i<4;i++){//处理4个字节for(j=1;j<=8;j++){//处理1个字节8位ﻩﻩﻩcord=irdata[k];ﻩﻩvalue=value>>1;ﻩif(cord>7)value=value|0x80; //大于某值为1k++;}IRcord[i]=value;ﻩvalue=0;ﻩ}irpro_ok=1;//处理完毕标志位置1}///////////////////////////////////////////void lcd_delay(ucharms)/*LCD1602 延时*/{ucharj;while(ms--){for(j=0;j<250;j++){;}}}//////////////////////////////////////////////void lcd_busy_wait() /*LCD1602 忙等待*/{lcd_rs_port= 0;lcd_rw_port= 1;lcd_en_port= 1;lcd_data_port= 0xff;_Nop();_Nop();ﻩ_Nop();_Nop();while(lcd_data_port&0x80);lcd_en_port= 0;}///////////////////////////////////////////////void lcd_command_write(ucharcommand) /*LCD1602命令字写入*/ {lcd_busy_wait();lcd_rs_port=0;lcd_rw_port =0;lcd_en_port=0;lcd_data_port =command;_Nop();_Nop();_Nop();_Nop();_Nop();_Nop();lcd_en_port = 1;_Nop();_Nop();_Nop();_Nop();_Nop();_Nop();lcd_en_port= 0;}/////////////////////////////////////////void lcd_system_reset()/*LCD1602初始化*/{lcd_delay(20);lcd_command_write(0x38);lcd_delay(100);lcd_command_write(0x38);lcd_delay(50);lcd_command_write(0x38);lcd_delay(10);lcd_command_write(0x08);lcd_command_write(0x01);lcd_command_write(0x06);lcd_command_write(0x0c);}//////////////////////////////////////////////////voidlcd_char_write(ucharx_pos,y_pos,lcd_dat)/*LCD1602 字符写入*/{x_pos &=0x0f;/*X位置范围0~15 */y_pos&=0x01; /* Y位置范围0~ 1 */if(y_pos==1) x_pos += 0x40;x_pos+= 0x80;lcd_command_write(x_pos);lcd_busy_wait();lcd_rs_port =1;lcd_rw_port =0;lcd_en_port=0;lcd_data_port=lcd_dat;_Nop();_Nop();_Nop();_Nop();_Nop();_Nop();lcd_en_port = 1;_Nop();_Nop();_Nop();_Nop();_Nop();_Nop();lcd_en_port =0;}void main(void){uchar i;ﻩlcd_system_reset();/*初始化LCD1602 */lcd_data_port = 0xff;for(i=0;i<16;i++) lcd_char_write(i,0,line0[i]);for(i=0;i<16;i++) lcd_char_write(i,1,line1[i]);EX0init();//Enable Global Interrupt FlagﻩTIM0init();while(1){//主循环if(irok){ﻩIrcordpro();irok=0;ﻩ}if(irpro_ok){ /*遥控成功接收*/lcd_char_write(8,0,lcd_mun_to_char[IRcord[0]/0x10]);ﻩﻩlcd_char_write(9,0,lcd_mun_to_char[IRcord[0]%0x10]);ﻩlcd_char_write(11,0,lcd_mun_to_char[IRcord[1]/0x10]);ﻩﻩﻩlcd_char_write(12,0,lcd_mun_to_char[IRcord[1]%0x10]);ﻩﻩlcd_char_write(8,1,lcd_mun_to_char[IRcord[2]/0x10]);lcd_char_write(9,1,lcd_mun_to_char[IRcord[2]%0x10]);ﻩﻩlcd_char_write(11,1,lcd_mun_to_char[IRcord[3]/0x10]);ﻩlcd_char_write(12,1,lcd_mun_to_char[IRcord[3]%0x10]);ﻩ}//将码值显示在液晶上}}源程序2:(在知道了按键编码的基础上,我们便可以加入判断,判断哪个键被按下,进而执行相关操作)我只修改main函数,其他与源程序1相同sbit led1=P1^0;sbitled2=P1^1;sbit led3=P1^2;sbit led4=P1^3;sbitled5=P1^4;//发光二极管控制端定义voidmain(void){ﻩuchari;ﻩlcd_system_reset(); /* 初始化LCD1602*/lcd_data_port =0xff;for(i=0;i<16;i++) lcd_char_write(i,0,line0[i]);ﻩfor(i=0;i<16;i++)lcd_char_write(i,1,line1[i]);ﻩEX0init(); // EnableGlobalInterrupt FlagﻩTIM0init();while(1){//主循环if(irok){ﻩIrcordpro();irok=0;ﻩﻩ}ﻩif(irpro_ok){ /*遥控成功接收*/ﻩswitch(IRcord[2])//为什么判断IRcord[2],因为这个里面存放的是数据码ﻩﻩ{ﻩcase0x0c: led1=0;//按0键,灯1亮ﻩﻩﻩﻩbreak;ﻩﻩcase 0x18:led2=0;//按1键,灯2亮ﻩﻩﻩﻩbreak;ﻩﻩcase 0x5e: led3=0;//按2键,灯3亮ﻩﻩﻩbreak;ﻩﻩﻩcase 0x08: led4=0;//按3键,灯4亮ﻩﻩﻩﻩbreak;ﻩﻩcase 0x1c:led5=0;//按4键,灯5亮ﻩﻩﻩﻩﻩbreak;ﻩ}ﻩ}}}附连接图。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第1章红外解码系统分析第1节设计要求整个控制系统的设计要求:被控设备的控制实时反应,从接收信号到信号处理及对设备控制反映时间应小于1s;整个系统的抗干扰能力强,防止误动作;整个系统的安装、操作简单,维护方便;成本低。
红外载波、编码电路设计要求:单片机定时器精确产生38KHz红外载波;根据控制系统要求能对红外控制指令信号精确编码并迅速发送。
红外解码电路设计要求:精确接收红外信号,并对所接收信号进行解码、放大、整形、解调等处理,最后输出TTL电平信号;对非红外光及边缘红外光抗干扰能力强。
设备扩展模块设计要求:直流控制交流;抗干扰能力强;反应迅速不产生误动作;能承受大电流冲击。
第2节总体设计方案2.1 方案论证驱动和开关方案一:采用晶闸管直接驱动。
其优点是体积小,电路简单,外围元件少。
但控制电流小,大电流晶闸管成本高,并且隔离性能差。
方案二:采用三极管驱动继电器。
其体积大,外围元件多。
优点是控制电流大,隔离性能好。
根据实际情况,拟采用方案二。
2.2 总体设计框图经过上述方案的分析选择,得出系统硬件由以下几部分组成:电视红外遥控器,51单片机最小系统,接收放大于一体集成红外接收头,1602液晶显示驱动电路。
整体设计思路为:根据扫描到不同的按键值转至相对应的ROM表读取数据。
确认设备及菜单选择键后AT89S2将从ROM读取出来的值,按照数据处理要求从P2.5输出控制脉冲和T0产生的38KHz的载波(周期是26.3μs)进行调制,经NPN三极管对信号放大驱动红外发光管将控制信号发送出去。
红外数据接收则是采用HS0038一体化红外接收头,内部集成红外接收、数据采集、解码的功能,只要在接收端INT0检测头信号低电平的到来,就可完成对整个串行的信号进行分析得出当前控制指令的功能。
然后根据所得的指令去操作相应的用电器件工作,如图1-1所示。
图1-1 电路设计整体框图第2章红外解码硬件电路设计第1节单片机及其硬件电路设计1.1 单片机的介绍AT89S52是一种低功耗、高性能CMOS8位微控制器,具有8K 在系统可编程Flash 存储器。
使用Atmel 公司高密度非易失性存储器技术制造,和工业80C51 产品指令和引脚完全兼容。
片上Flash允许程序存储器在系统可编程,亦适于常规编程器。
在单芯片上,拥有灵巧的8 位CPU 和在系统可编程Flash,使得AT89S52为众多嵌入式控制使用系统提供高灵活、超有效的解决方案。
AT89S52具有以下标准功能:8K字节Flash,256字节RAM,32 位I/O 口线,看门狗定时器,2 个数据指针,三个16 位定时器/计数器,一个6向量2级中断结构,全双工串行口,片内晶振及时钟电路。
另外,AT89S52 可降至0Hz 静态逻辑操作,支持2种软件可选择节电模式。
空闲模式下,CPU停止工作,允许RAM、定时器/计数器、串口、中断继续工作。
掉电保护方式下,RAM内容被保存,振荡器被冻结,单片机一切工作停止,直到下一个中断或硬件复位为止。
图2-1 AT89S52引脚图1.2时钟电路及RC复位电路AT89S52芯片内部有一高增益反相放大器,用于构成振荡器反相放大器的输入端为XTAL1,输出端为XTAL2。
在XTAL1、XTAL2(第19、18引脚)两端接一个石英晶体振荡器,和两个电容就构成了稳定自激谐振电路。
晶振频率为11.0592MHz,C12、C13是两个瓷片电容,和晶振Y2构成了自激谐振电路。
其电容的作用主要是对频率进行微调,一般取30~45pF左右。
使用该电路可产生稳定的11.0592MHz频率,受外界的环境的干扰影响非常小。
其接法如图2-2所示:图2-2 晶振电路复位是单片机初始化操作,其主要功能是把PC初始化为0000H,使单片机从0000H 单元执行程序。
除了进入系统的正常初始化之外,当程序运行出错或操作错误使系统处于死锁状态时,为摆脱困境,也需要按复位键重新启动。
复位操作有上电自动复位和按键手动复位两种方式。
本设计采用了按键手动复位方式。
该复位电路如图2-3所示。
复位电路采用了按键和上电复位。
上电和按键均可以有效复位。
上电瞬间RST引脚获得高电平,单片机复位电路随着电容的C11的充电,RST引脚的高电平逐渐下降。
RST引脚的高电平只要能保持足够的时间(2个机器周期),单片机就可以进行复位操作。
按键复位是直接将高电平通过电阻R11、R10分压到达RESET引脚,实现复位操作。
图2-3复位电路图第2节红外遥控器电路2.1 采用TC9012芯片编码的遥控器TC9012 是一块用于东芝系列红外遥控系统中的专用发射集成电路,采用CMOS 工艺制造。
它可外接32 个按键,提供8 种用户编码,另外还具有3 种双重按键功能。
TC9012 的管脚设置和外围使用线路都进行了高度优化,以配合PCB 的布图和低成本的要求。
图2-4 TC9012引脚图低压CMOS 工艺制造,低功耗超小静态电流,低工作电压,精简条指令码,8 种用户编码可选择,TSOP-20、SOP20、COB 可选的封装形式。
使用范围:电视机、组合音响设备、录音卡座、VCD、DVD 播放机。
2.2 红外发射电路将脉冲编码信号调制在载波振荡器产生的载波上(也称脉码调制),然后用这脉码调制信号去驱动红外发光二极管,以发出经过调制的红外光波,其红外遥控系统电路如图2-5所示。
图2-5红外遥控系统电路框图通常,红外遥控器将遥控信号(二进制脉冲码)调制在38KHz的载波上,经缓冲放大后送至红外发光二极管,转化为红外信号发射出去。
二进制脉冲码的形式有多种,其中最为常用的是PWM码(脉冲宽度调制码)和PPM码(脉冲位置调制码)。
前者以宽脉冲表示1,窄脉冲表示0。
后者脉冲宽度一样,但是码位的宽度不一样,码位宽的代表1,码位窄的代表0。
脉宽为0.56ms、间隔0.565ms、周期为1.125ms的组合表示二进制的“0”;以脉宽为0.56ms、间隔1.69ms、周期为2.25ms的组合表示二进制的“1”。
如图2-6示。
本设计是以PPM码(脉冲位置调制码)对红外数据的发送进行论证。
图2-6 指令脉冲图遥控编码脉冲信号是由引导码、系统码、系统反码、功能码、功能反码等信号组成。
引导码也叫起始码,由宽度为4.5ms的高电平和宽度为4.5ms的低电平组成(不同的红外家用设备在高低电平的宽度上有一定区别),用来标志遥控编码脉冲信号的开始。
如图2-7所示。
图2-7 信号引导码图系统码也叫识别码,它用来指示遥控系统的种类,以区别其它遥控系统,防止各遥控系统的误动作功能码也叫指令码,它代表了相应的控制功能,接收机中的可根据功能码的数值完成各种功能操作。
系统反码和功能反码分别是系统码和功能码的反码,反码的加入是为了能在接收端校对传输过程中数据是否产生差错。
脉冲位置表示的“0”和“1”组成的32位二进制码,前16位控制指令,控制不同的红外遥控设备。
而不同的红外家用电器又有不同的脉冲调控方式,后16位分别是8位的功能码和8位的功能反码。
串行数据码时序图如2-8所示。
图2-8 串行数据码时序图将要发送的指令脉冲编码信号调制在38KHz的载波上,可以增加信号的抗干扰能力,提高信号传输效率。
信号调制时序如2-9所示。
图2-9 信号调制图TC9012作为红外遥控器控制核心,遥控编码脉冲信号是由引导码、系统码、系统反码、功能码、功能反码等信号组成。
以PPM码(脉冲位置调制码)对红外数据调制在38KHz 的载波上对外进行发射信号。
第3节红外接收显示电路硬件电路组成有:红外接收电路、电源电路、1602液晶显示电路。
3.1 红外接收电路HS0038是用于红外遥控接收的小型一体化接收头,集成红外线的接收、放大、解调,不需要任何外接元件,就能完成从红外线接收到输出和TTL电平信号兼容的所有工作,而体积和普通的塑封三极管大小一样,它适合于各种红外线遥控和红外线数据传输,中心频率38.0kHz。
接收器对外只有3个引脚:OUT、GND、VCC和单片机接口非常方便。
1脚接电源(+VCC),2脚GND是地线(0V),3脚脉冲信号输出,经非门U6缓冲和P24的判断信号进行逻辑和使得进入INT0的信号恰好是红外数据发射电路输出端P25的相反相信号,只要检测到INT0信号下降沿从而测出控制指令的功能。
图2-12 HS0038内部结构工作流程HS0038接收原理:红外线接收是把遥控器发送的数据(已调信号)转换成一定格式的控制指令脉冲(调制信号、基带信号),是完成红外线的接收、放大、解调,还原成发射格式(高、低电位刚好相反)的脉冲信号。
这些工作通常由一体化的接收头来完成,输出TTL 兼容电平。
最后通过解码把脉冲信号转换成数据,从而实现数据的传输。
图2-13是一个红外线接收电路框图。
本设计的核心部分在于红外接收及LCD显示。
其中红外数据接收是对红外二进制脉冲的宽度进行测量,从而获得红外遥控的脉冲信息。
采用外部中断成为了理所当然的选择,外部中断只有低电平和下降沿触发两种方式,这就使得单片机只能一次性对脉冲的高电平或低电平进行测量,而一连串的脉冲是不可能分开多次测量的,因此,为了解决这一问题,本人将从接收头出来的红外二进制脉冲信号和标志位(P24)进行逻辑或非,然后再输入到INT0(P3.2)引脚,使得输入INT0的信号恰好是红外数据发射电路输出端P25的信号,只要检测到INT0信号下降沿到上升沿的这段时间。
如果相邻的两个中断间隔的时间长度为1.125ms,说明接收到的是“0”;时间长度是2.25ms则为“1”。
因此,脉冲电平的每一次跳变都会形成一次中断,在中断服务子程中即可实现一次性对一连串连续波形的测量,在测量后对0和1的各数据统计从而测出控制指令的功能。
硬件或非门的反应速度是纳秒级的,满足实时要求。
红外接收电路连接图如图2-14所示。
图2-14红外接收电路图3.2 1602液晶显示电路1602LCD主要技术参数:显示容量:16×2个字符,芯片工作电压:4.5~5.5V,工作电流:2.0mA(5.0V),模块最佳工作电压:5.0V,字符尺寸:2.95×4.35(W×H)mm。
1.引脚功能说明1602LCD采用标准的14脚(无背光)或16脚(带背光)接口,各引脚接口说明如表2-1所示。
表2-1液晶1602引脚说明编号符号引脚说明编号符号引脚说明1 VSS 电源地9 D2 数据2 VDD 电源正极10 D3 数据3 VL 液晶显示偏压11 D4 数据4 RS 数据/命令选择12 D5 数据5 R/W 读/写选择13 D6 数据6 E 使能信号14 D7 数据7 D0 数据15 BLA 背光源正极8 D1 数据16 BLK 背光源负极第1脚:V SS为地。