FreeRTOS--配置说明
FreeRTOS操作系统配置参数说明

当然,如果没有使用内核方面的调试器,这个宏定义是没有意义的。
USE_APPLICATION_TASK_TAG
处于就绪状态的相同优先级任务使用时间片调度机制共享处理器时间。
MINIMAL_STACK_SIZE
此参数用于定义空闲任务的栈空间大小,单位字。默认128个字
MAX_TASK_NAME_LEN
定义任务名最大的字符数
USE_16_BIT_TICKS
系统时钟节拍计数使用TickType_t数据类型定义的。
图中描述了四个处于空闲优先级的任务,任务A、B和C是用户任务,任务I是空闲任务。上下文切换周期性的发生在T0、T1…T6时刻。当用户任务运行时,空闲任务立刻让出CPU,但是,空闲任务已经消耗了当前时间片中的一定时间。这样的结果就是空闲任务I和用户任务A共享一个时间片。用户任务B和用户任务C因此获得了比用户任务A更多的处理器时间。
USE_TASK_NOTIFICATIONS
设置USE_TASK_NOTIFICATIONS为Enable将会开启任务通知功能,有关的API函数也会被编译。设置宏USE_TASK_NOTIFICATIONS为Disabled则关闭任务通知功能,相关API函数也不会被编译。默认这个功能是开启的。开启后,每个任务多增加8字节RAM。
USE_PORT_OPTIMISED_TASK_SELECTION
FreeRTOS的硬件有两种方法选择下一个要执行的任务:通用方法和特定于硬件的方法。
Disabled:可以用于所有FreeRTOS支持的硬件;完全用C实现,效率略低于特殊方法;不强制要求限制最大可用优先级数。
freertos 定时器用法

freertos 定时器用法摘要:1.FreeRTOS 定时器简介2.定时器操作的基本步骤3.定时器应用实例正文:FreeRTOS 定时器用法FreeRTOS 是一款开源实时操作系统,提供了丰富的功能以支持各种实时应用。
在FreeRTOS 中,定时器是一个重要的组件,用于实现延时、调度等功能。
本文将详细介绍FreeRTOS 定时器的用法。
1.FreeRTOS 定时器简介FreeRTOS 定时器主要包括系统定时器、软件定时器和周期性定时器。
系统定时器由操作系统内核管理,用于操作系统任务调度等;软件定时器由用户进程创建和管理,用户可以自定义定时器行为;周期性定时器则是定时器的一种特殊形式,按照指定的时间间隔产生事件。
2.定时器操作的基本步骤(1) 配置定时器:在使用定时器前,需要对其进行初始化配置,包括设置定时器超时值、选择定时器类型等。
(2) 启动定时器:配置完成后,需要调用相应函数启动定时器。
对于系统定时器和软件定时器,可以使用`xTimerStart()`函数启动;对于周期性定时器,在创建时设置` periodic`标志,系统将自动启动定时器。
(3) 处理定时器事件:定时器超时后,会触发相应的事件。
对于系统定时器,会触发系统任务调度;对于软件定时器,会触发用户进程中的回调函数;对于周期性定时器,会按照指定的时间间隔触发事件。
(4) 停止定时器:在定时器不再需要时,需要调用相应函数停止定时器。
对于系统定时器和软件定时器,可以使用`xTimerStop()`函数停止;对于周期性定时器,只需删除定时器即可。
3.定时器应用实例以下是一个简单的FreeRTOS 定时器应用实例,实现一个任务每秒打印一次“Hello, FreeRTOS!”。
```c#include "FreeRTOS.h"#include "task.h"#include "timers.h"#define TIMER_INTERVAL (1000 / portTICK_PERIOD_MS)void vPrintTask(void *pvParameters){for (;;){printf("Hello, FreeRTOS!");vTaskDelay(TIMER_INTERVAL);}}int main(void){// 创建并启动定时器xTimerCreate("PrintTaskTimer",pdMS_TO_TICKS(TIMER_INTERVAL), pdTRUE, NULL, vPrintTask);xTimerStart(xTimerGetHandleFromName("PrintTaskTimer"), NULL);// 创建并启动一个持续运行的任务xTaskCreate(vPrintTask, "PrintTask", 256, NULL, 1, NULL);// 开始调度任务vTaskStartScheduler();// 程序不会执行到这里return 0;}```在这个例子中,我们创建了一个软件定时器,每隔1 秒触发一次vPrintTask 任务。
Freertos之系统配置
Freertos转自:/html/42/t-2642.htmlfreeRTOS 配置在:FREERTOS_CONFIG.H 里面,条目如下:#ifndef FREERTOS_CONFIG_H#define FREERTOS_CONFIG_H/* Here is a good place to include header files that are required across y our application. */#include "something.h"/* 是否配置成抢先先多任务内核,是1的时候,优先级高的任务优先执行。
为0任务就没有优先级之说,用时间片轮流执行*/#define configUSE_PREEMPTION 1/* IDLE任务的HOOK函数,用于OS功能扩展,需要你自己编相应函数,名字是voi d vApplicationIdleHook( void ) */#define configUSE_IDLE_HOOK 0/* SYSTEM TICK的HOOK函数,用于OS功能扩展,需要你自己编相应函数,名字是void vApplicationTickHook(void ) */#define configUSE_TICK_HOOK 0/* 系统CPU频率,单位是Hz */#define configCPU_CLOCK_HZ 58982400/* 系统SYSTEM TICK每秒钟的发生次数,数值越大系统反应越快,但是CPU用在任务切换的开销就越多*/#define configTICK_RATE_HZ 250/* 系统任务优先级数。
5 说明任务有5级优先度。
这个数目越大耗费RAM越多*/#define configMAX_PRIORITIES 5/* 系统最小堆栈尺寸,注意128不是128字节,而是128个入栈。
比如ARM32位,1 28个入栈就是512字节*/#define configMINIMAL_STACK_SIZE 128/* 系统可用内存。
freertos手册
freertos手册摘要:1.FreeRTOS 简介2.FreeRTOS 的特点3.FreeRTOS 的应用场景4.FreeRTOS 手册的主要内容5.如何使用FreeRTOS 手册正文:FreeRTOS 是一款开源实时操作系统,适用于各种嵌入式系统。
作为一个轻量级的操作系统,FreeRTOS 在资源有限的设备上表现出色,同时具有可扩展性和可靠性。
FreeRTOS 具有以下几个主要特点:1.可移植性:FreeRTOS 可以在多种处理器架构上运行,例如ARM、x86、MIPS 等。
2.小巧的内核:FreeRTOS 内核小巧,占用资源少,可以在有限的内存空间中运行。
3.实时性:FreeRTOS 具有实时性,可以满足对实时性要求较高的嵌入式系统。
4.可扩展性:FreeRTOS 提供了丰富的中间件和软件包,可以根据实际需求进行选择和配置。
5.稳定性:FreeRTOS 经过多年的发展和广泛的应用,已经变得非常稳定和可靠。
FreeRTOS 的应用场景非常广泛,包括但不限于以下几个方面:1.工业自动化:FreeRTOS 可以用于工业自动化设备,例如PLC、工控机等。
2.智能家居:FreeRTOS 可以用于智能家居设备,例如智能灯泡、智能插座等。
3.物联网:FreeRTOS 可以用于各种物联网设备,例如传感器节点、路由器等。
4.医疗设备:FreeRTOS 可以用于医疗设备,例如心电图仪、呼吸机等。
FreeRTOS 手册是使用FreeRTOS 的必备指南,其中包括了FreeRTOS 的详细使用方法和应用实例。
使用FreeRTOS 手册可以帮助开发者快速掌握FreeRTOS 的使用方法,提高开发效率。
使用FreeRTOS 手册的方法如下:1.首先,需要下载并安装FreeRTOS,可以从FreeRTOS 官网上下载最新版本。
2.熟悉FreeRTOS 的基本概念和原理,例如任务管理、时间管理、队列等。
3.阅读FreeRTOS 手册,了解FreeRTOS 的使用方法和应用实例。
(2024年)FreeRTOS从入门到精通1

现已成为最受欢迎的嵌入式实 时操作系统之一
广泛应用于各种行业,包括汽 车、医疗、工业控制等
不断更新迭代,加入新功能和 优化性能
2024/3/26
5
主要特点与优势
可靠性
经过严格测试和验 证,具有高度的稳 定性
开放性
源代码公开,易于 学习和定制
2024/3/26
实时性
提供可预测的响应 时间,适合对时间 要求严格的应用
安装必要的驱动程序和组件
如串口驱动、JTAG驱动等,确保电脑与开发板正常 通信。
15
第一个FreeRTOS程序示例
创建FreeRTOS工程
在IDE中创建一个新的FreeRTOS工程,并配置相关参数。
编写任务代码
创建多个任务,并编写相应的任务处理函数,实现任务间的切换和通信。
编译和下载程序
将编写好的代码编译成可执行文件,并下载到开发板中进行测试。
功耗管理策略
分享多种功耗管理策略,如动态调 整系统时钟、关闭未使用外设、使 用低功耗模式等,降低系统功耗。
2024/3/26
功耗管理API介绍
介绍FreeRTOS提供的功耗管理相 关API,如tickless模式、低功耗模 式切换等,方便开发者进行功耗优
化。
功耗管理实践案例
分享在FreeRTOS中进行功耗优化 的实践案例,包括硬件平台选择、 软件架构设计、功耗测试方法等,
2024/3/26
备份和恢复
设计备份和恢复机制,确保系统数据安全和 可恢复性。
31
企业级应用部署注意事项
硬件兼容性
确保FreeRTOS与目标硬件兼容,充分发挥 硬件性能。
可扩展性规划
考虑系统未来扩展需求,设计可扩展的架构 和接口。
【FreeRTOS操作系统教程】第7章 FreeRTOSConfig配置文件详解
第7章F r e e R T O S C o n f i g配置文件详解本章节为大家讲解FreeRTOS的配置文件FreeRTOSConfig.h中每个选项的作用。
初学的话,一定要有个了解,随着以后的学习一定要熟练操作每个配置选项。
本章节内容主要整理自官网:/a00110.html7.1 配置选项说明7.2 基本配置7.3 钩子函数配置7.4 任务运行信息获取配置7.5 合作式任务配置7.6 软件定时器配置7.7 内核配置7.8 断言配置7.9 函数Include配置7.10总结7.1配置选项说明对于初学者来说,要在以后的时间里达到熟练操作FreeRTOS的配置选项。
大部分的选项在FreeRTOS.h文件里面都有默认的配置。
用户在使用时,把用到配置选项放在FreeRTOSConfig.h文件配置即可。
7.2基本配置基本配置是FreeRTOS中经常用到的配置,下面分别进行介绍,这里有个感性认识即可,随着后面的使用中会熟练起来。
7.2.1configUSE_PREEMPTION◆配置为1使能抢占式调度器。
◆配置为0使能合作式调度器。
7.2.2configUSE_PORT_OPTIMISED_TASK_SELECTION此配置用于优化优先级列表中要执行的最高优先级任务的算法。
对CM内核的移植文件,默认已经在文件portmacro.h文件中使能。
◆通用方式---配置为0:●所有平台的移植文件都可以配置为0,因为这是通用方式。
●纯C编写,比专用方式效率低。
●可用的优先级数量不限制。
◆专用方式---配置为1:●部分平台支持。
●这些平台架构有专用的汇编指令,比如CLZ(Count Leading Zeros)指令,通过这些指令可以加快算法执行速度。
●比通用方式高效。
●有最大优先级数限制,通常限制为32个。
7.2.3configUSE_TICKLESS_IDLE此配置用于使能tickless低功耗模式◆配置为1使能tickless低功耗模式◆配置为0禁能tickless低功耗模式7.2.4configCPU_CLOCK_HZ此参数用于定义CPU的主频,单位Hz。
FreeRTOS精选全文完整版

可编辑修改精选全文完整版FreeRTOS是一个开源的实时操作系统,FATFS是一个用于嵌入式系统的文件系统,而sqlite3是一个嵌入式数据库引擎。
移植这些组件需要完成一系列的步骤。
首先,需要实现一个基于FATFS底层的虚拟文件系统(VFS)接口,用于在FreeRTOS中移植sqlite3。
这个接口可以通过实现三个结构体来完成:sqlite3_vfs、sqlite3_io_methods和sqlite3_file。
这些结构体的详细说明可以***ite/c3ref/vfssqlite3_io_methods- sqlite3_io_methods结构体:https******其次,还可以选择性地实现内存分配和互斥实现。
关于在SQLite中实现动态内存分配和互斥的方法可以在以下链接中找到:-***最后,在打开数据库之前,可以使用sqlite3_config函数配置互斥锁。
具体的使用方法可以参考以下代码示例:```// 打开数据库前sqlite3_config(SQLITE_CONFIG_MUTEX, &sMutex);rc = sqlite3_open(Name, &db); // 打开数据库```相关问题:1、stm32f103 freertos fatfs对于STM32F103 微控制器来说,有两个非常流行的库可以一起使用:FreeRTOS 和FatFs。
FreeRTOS 是一个开源的实时操作系统内核,可以用于多任务处理和调度。
它提供了任务管理、中断处理和时间管理等功能,非常适合嵌入式系统开发。
你可以在ST 官方网站上找到适用于STM32F103 的FreeRTOS 移植。
FatFs 是一个用于嵌入式系统的轻量级FAT 文件系统库。
它支持多种存储介质,如SD 卡、SPI Flash 等,并提供了文件操作接口,使得在嵌入式系统中使用文件系统变得更加方便。
你可以从官方网站上下载最新版本的FatFs 库,并根据文档进行配置和使用。
freertos手册

freertos手册摘要:1.Flink on YARN 简介2.Flink on YARN 的参数3.Flink on YARN 参数的使用方法4.总结正文:1.Flink on YARN 简介Flink 是一个分布式流处理框架,可以实现高吞吐量、低延迟、状态管理等功能。
而YARN(Yet Another Resource Negotiator)是Apache Hadoop 的一个核心组件,负责资源管理和任务调度。
将Flink 与YARN 结合,可以实现对分布式流处理的高效资源管理。
2.Flink on YARN 的参数在使用Flink on YARN 时,需要对一些参数进行配置,以确保Flink 任务在YARN 集群上正常运行。
以下是一些重要的Flink on YARN 参数:- `flink-yarn-cluster-address`: YARN 集群的地址,用于Flink 任务提交和状态查询。
- `flink-yarn-taskmanager-number`: Flink 在YARN 集群上分配的任务管理器数量。
- `flink-yarn-container-address`: Flink 任务在YARN 集群上分配的容器地址。
- `flink-yarn-container-id`: Flink 任务在YARN 集群上分配的容器ID。
- `flink-yarn-application-name`: Flink 任务在YARN 集群上的应用名称。
- `flink-yarn-application-timeout`: Flink 任务在YARN 集群上的超时时间。
3.Flink on YARN 参数的使用方法在使用Flink on YARN 参数时,需要根据实际需求对这些参数进行配置。
以下是一些建议:- 根据YARN 集群的资源情况,合理设置`flink-yarn-taskmanager-number`,以提高任务并行度。
[FreeRTOS入门]1.CubeMX中FreeRTOS配置参数及理解
![[FreeRTOS入门]1.CubeMX中FreeRTOS配置参数及理解](https://img.taocdn.com/s3/m/c0e91a0353d380eb6294dd88d0d233d4b14e3fc5.png)
[FreeRTOS⼊门]1.CubeMX中FreeRTOS配置参数及理解1.有关优先级 1.1 Configuration --> FreeRTOSMAX_PRIORITIES 设置任务优先级的数量:配置应⽤程序有效的优先级数⽬。
任何数量的任务都可以共享⼀个优先级,使⽤协程可以单独的给与它们优先权。
见MAX_CO_ROUTINE_PRIORITIES。
在RTOS内核中,每个有效优先级都会消耗⼀定量的RAM,因此这个值不要超过你的应⽤实际需要的优先级数⽬。
每⼀个任务都会被分配⼀个优先级,优先级值从0~(MAX_PRIORITIES - 1)之间。
低优先级数表⽰低优先级任务。
空闲任务的优先级为0(PriorityIdle),因此它是最低优先级任务。
FreeRTOS调度器将确保处于就绪状态(Ready)或运⾏状态(Running)的⾼优先级任务⽐同样处于就绪状态的低优先级任务优先获取处理器时间。
换句话说,处于运⾏状态的任务永远是⾼优先级任务。
处于就绪状态的相同优先级任务使⽤时间⽚调度机制共享处理器时间。
Interrupt nesting behaviour configuration 断⾔配置LIBRARY_LOWEST_INTERRUPT_PRIORITY此宏定义是⽤来配置 FreeRTOS中⽤到的SysTick中断和PendSV中断的优先级reeRTOSreeRTOSreeRTOSreeRTOS ⽤到的 SysTSysT ick 中断和 PendSV中断的优先级。
在 NVIC分组设置为4的情况下,此宏定义的范围就是 0-15 ,即专门配置抢占优先级。
这⾥即专门配置抢占优先级。
这⾥配置为了 15,即 SysTick和 PendSV 都配配置为了最低优先级,实际项⽬中也建议配置为最低优先级。
LIBRARY_MAX_SYSCALL_INTERRUPT_PRIORITY定义了受FreeRTOS管理的最⾼优先级中断。
freertos函数手册

freertos函数手册(原创实用版)目录1.FreeRTOS 简介2.FreeRTOS 函数手册内容3.FreeRTOS 任务应用函数介绍4.使用 FreeRTOS 的注意事项5.总结正文1.FreeRTOS 简介FreeRTOS 是一款开源实时操作系统,适用于嵌入式系统。
它的名字来源于“FreeRTOS”,意为“免费的实时操作系统”。
FreeRTOS 具有轻量级、可扩展性和高可靠性等特点,广泛应用于各类嵌入式设备。
2.FreeRTOS 函数手册内容FreeRTOS 函数手册包含了丰富的函数,这些函数可以用于完成各种任务。
例如,可以用于创建任务、删除任务、更改任务的优先级等。
此外,手册还包括了一些用于处理中断的函数,以及用于与外部设备进行通信的函数。
3.FreeRTOS 任务应用函数介绍在 FreeRTOS 中,任务是核心概念之一。
通过使用任务,可以实现多任务并发,提高系统的运行效率。
FreeRTOS 提供了许多用于处理任务的函数。
例如:- xTaskCreate() 函数:用于创建一个新任务。
- xTaskDelete() 函数:用于删除一个任务。
- xTaskChangePriority() 函数:用于更改任务的优先级。
4.使用 FreeRTOS 的注意事项在使用 FreeRTOS 时,需要注意以下几点:- 确保系统时钟频率足够高,以保证实时性能。
- 合理设置任务的优先级,避免任务饥饿。
- 避免使用太多的全局变量,以减少任务间的相互影响。
- 正确处理任务间的同步与通信,避免死锁。
5.总结总的来说,FreeRTOS 是一款功能强大、易于使用的实时操作系统。
通过学习 FreeRTOS 函数手册,可以掌握如何在嵌入式系统中实现多任务并发,提高系统的运行效率。
FreeRTOS—低功耗之睡眠模式,停机模式,待机模式

FreeRTOS—低功耗之睡眠模式,停机模式,待机模式低功耗是 MCU 的⼀项重要的指标,⽐如某些可穿戴的设备,其携带的电量有限,如果整个电路消耗的电量特别⼤的话,就会经常出现电量不⾜的情况,影响⽤户体验。
STM32F103 睡眠模式介绍说明:在 FreeRTOS 系统上⾯实现睡眠⽅式仅需了解这⾥讲解的知识基本就够⽤了,更多睡眠⽅式的知识请看 STM32F103 参考⼿册和Cortex-M3 权威指南。
在系统或电源复位以后,微控制器处于运⾏状态。
当 CPU 不需继续运⾏时,可以利⽤多种低功耗模式来节省功耗,例如等待某个外部事件时,⽤户需要根据最低电源消耗、最快速启动时间和可⽤的唤醒源等条件,选定⼀个最佳的低功耗模式。
STM32F103 有三种低功耗模式:睡眠模式(Cortex™-M3 内核停⽌,所有外设包括 Cortex-M3 核⼼的外设,如 NVIC、系统滴答定时器 Systick 等仍在运⾏)。
停机模式(所有的时钟都已停⽌)。
待机模式(1.8V 电源关闭)。
如何进⼊睡眠模式通过执⾏ WFI(等待中断)或 WFE(等待事件)指令进⼊睡眠状态。
根据 Cortex™-M3 系统控制寄存器中的 SLEEPONEXIT 位的值,可以通过两种⽅案选择睡眠模式进⼊机制:SLEEP-NOW:如果 SLEEPONEXIT 位被清除,当 WFI 或 WFE 被执⾏时,微控制器⽴即进⼊睡眠模式。
SLEEP-ON-EXIT:如果 SLEEPONEXIT 位被置位,系统从最低优先级的中断处理程序中退出时,微控制器就⽴即进⼊睡眠模式。
实际应⽤中我们采⽤ WFI 指令进⼊睡眠模式,睡眠模式的进⼊机制是采⽤的 SLEEP-NOW。
因为系统复位上电后 SLEEPONEXIT 位是被清除的,所以这个位也不需要专门的去设置。
另外在睡眠模式下,所有的 I/O 引脚都保持它们在运⾏模式时的状态。
在 FreeRTOS 系统上,不使⽤ tickless 低功耗模式的话,我们可以将 WFI 指令放到空闲任务⾥⾯实现。
RTOS操作系统讲解--FreeRTOS
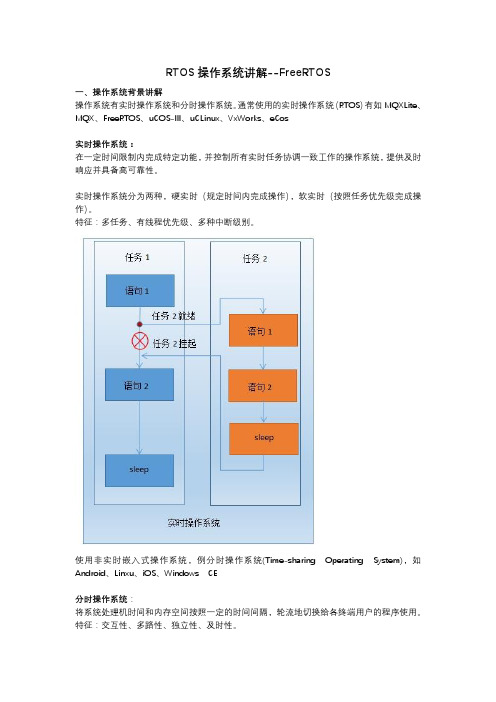
RTOS操作系统讲解--FreeRTOS一、操作系统背景讲解操作系统有实时操作系统和分时操作系统。
通常使用的实时操作系统(RTOS)有如MQXLite、MQX、FreeRTOS、uCOS-III、uCLinux、VxWorks、eCos实时操作系统:在一定时间限制内完成特定功能,并控制所有实时任务协调一致工作的操作系统,提供及时响应并具备高可靠性。
实时操作系统分为两种,硬实时(规定时间内完成操作),软实时(按照任务优先级完成操作)。
特征:多任务、有线程优先级、多种中断级别。
使用非实时嵌入式操作系统,例分时操作系统(Time-sharing Operating System),如Android、Linxu、iOS、Windows CE分时操作系统:将系统处理机时间和内存空间按照一定的时间间隔,轮流地切换给各终端用户的程序使用。
特征:交互性、多路性、独立性、及时性。
那么实时操作系统和分时操作系统的主要区别的第一性是什么呢?本质就在于设计操作系统的时候,架构机制必须支持是否需要在特定的时间内完成某项任务。
if yes,real-time os,otherwise no.英文称Real Time Operating System,简称RTOS。
二、实时操作系统讲解1.实时操作系统定义实时操作系统(RTOS)是指当外界事件或数据产生时,能够接受并以足够快的速度予以处理,其处理的结果又能在规定的时间之内来控制生产过程或对处理系统作出快速响应,并控制所有实时任务协调一致运行的操作系统。
因而,提供及时响应和高可靠性是其主要特点。
实时操作系统有硬实时和软实时之分,硬实时要求在规定的时间内必须完成操作,这是在操作系统设计时保证的;软实时则只要按照任务的优先级,尽可能快地完成操作即可。
我们通常使用的操作系统在经过一定改变之后就可以变成实时操作系统。
实时操作系统是保证在一定时间限制内完成特定功能的操作系统。
例如,可以为确保生产线上的机器人能获取某个物体而设计一个操作系统。
freertos使用指南
freertos使用指南英文回答:FreeRTOS is a popular real-time operating system (RTOS) that is widely used in embedded systems development. It provides a multitasking environment for running multiple tasks concurrently, with each task having its own priority and execution time. In this guide, I will provide an overview of how to use FreeRTOS effectively.Firstly, it is important to understand the basic concepts of FreeRTOS. Tasks are the fundamental building blocks of FreeRTOS applications. Each task is a separate thread of execution and can be thought of as an independent program running within the system. Tasks can be created, deleted, and suspended dynamically during runtime.To create a task, you need to define a function that represents the task's code. This function will be executed when the task is started. You also need to specify thetask's priority, stack size, and other parameters. Here's an example:c.void task1(void pvParameters) {。
freertos 最小要求
freertos 最小要求
FreeRTOS的最小要求包括以下几个方面:
1. 硬件要求:FreeRTOS对硬件的要求相对较低,最低仅需3kb的内存空间就可以运行。
2. 开发环境:您可以使用支持C语言和汇编语言的任何IDE或编译器。
3. 源代码:您需要提供FreeRTOS的源代码以及与您的硬件和应用程序相关的配置文件和示例代码。
4. 任务管理:FreeRTOS提供了任务管理功能,可以创建、删除、挂起和恢复任务,以及提供任务优先级管理等功能。
5. 事件管理:FreeRTOS提供了事件管理功能,可以创建、删除和管理事件,以及提供事件优先级管理等功能。
6. 时间管理:FreeRTOS提供了时间管理功能,可以获取当前时间、延时、定时等操作。
7. 内存管理:FreeRTOS提供了内存管理功能,可以动态分配和释放内存空间。
8. 调试工具:FreeRTOS提供了多种调试工具,如串口调试、JTAG调试等,方便开发者进行应用程序的调试和测试。
只要您满足了以上条件,就可以开始使用FreeRTOS进行实时操作系统的开发和应用了。
freertos 入门手册 中文 pdf

freertos 入门手册中文 pdf 引言概述:FreeRTOS是一个流行的实时操作系统,广泛应用于嵌入式系统开发中。
对于初学者来说,一本中文PDF的FreeRTOS入门手册将会是一个很好的学习资源。
本文将从五个大点来详细阐述该手册的内容,包括任务管理、内存管理、时间管理、中断处理以及通信与同步。
正文内容:1. 任务管理:1.1 任务的创建与删除:手册详细介绍了如何创建和删除任务,包括任务的优先级、堆栈大小以及任务的调度。
1.2 任务的挂起与恢复:手册提供了挂起和恢复任务的方法,以及如何处理任务挂起和恢复的注意事项。
1.3 任务通信:手册介绍了任务之间的通信方式,如队列、信号量和消息等,以及如何使用这些通信方式实现任务间的数据传输和同步。
2. 内存管理:2.1 动态内存分配:手册详细介绍了FreeRTOS中的动态内存分配函数,以及如何使用这些函数进行内存的申请和释放。
2.2 堆管理:手册介绍了FreeRTOS中的堆管理机制,包括堆的初始化、堆的大小设置以及堆的调试技巧。
2.3 内存保护:手册提供了一些方法来保护任务的堆栈和堆空间,以防止内存溢出和堆栈溢出等问题。
3. 时间管理:3.1 延时函数:手册介绍了FreeRTOS中的延时函数,包括任务延时和中断延时的方法和注意事项。
3.2 定时器:手册详细介绍了FreeRTOS中的软件定时器和硬件定时器的使用方法,以及定时器的配置和管理。
3.3 时间片轮转调度:手册解释了FreeRTOS中的时间片轮转调度算法,以及如何配置和使用该调度算法。
4. 中断处理:4.1 中断优先级:手册介绍了FreeRTOS中的中断优先级设置方法,以及如何处理不同优先级中断的冲突和嵌套。
4.2 中断服务例程:手册提供了编写中断服务例程的指导,包括中断服务例程的编写规范和注意事项。
4.3 中断控制:手册详细介绍了FreeRTOS中的中断控制函数,包括中断的使能和禁止,以及如何处理中断的优先级和嵌套。
FreeRTOS学习笔记——系统配置
FreeRTOS学习笔记——系统配置FreeRTOS的系统配置⽂件是“FreeRTOSConfig.h”,通过此⽂件可以对系统进⾏裁剪和配置。
FreeRTOS的配置基本都是通过“FreeRTOSConfig.h”中的#define语句来定义宏定义实现的。
⼀、“INCLUDE_”开始的宏使⽤“INCLUDE_”开始的宏表⽰使能或除能对应的FreeRTOS的API函数,作⽤就是⽤来配置FreeRTOS的可选API函数。
⽐如当宏INCLUDE_vTaskPrioritySet配置为0的时候不能表⽰不能使⽤vTaskPrioritySet()函数。
如图所⽰:只有当宏INCLUDE_vTaskPrioritySet配置为1的时候,vTaskPrioritySet()函数才会被编译。
不⽌FreeRTOS这么⼲,其他的很多协议栈、GUI库和RTOS系统也都是使⽤条件编译来实现配置和剪裁的,条件编译的好处就是节省空间,不需要的功能就不⽤编译,根据实际需求减少系统占⽤的RAM和ROM⼤⼩,根据⾃⼰使⽤的MCU来调整系统消耗,降低成本。
其他的⼏个INCLUDE_开头的宏也是相同的道理:⼆、“config”开始的宏1.configAPPLICATION_ALLOCATED_HEAP“config”开始的宏也是⽤来完成FreeRTOS配置和裁剪的,例如,configAPPLICATION_ALLOCATED_HEAP定义为1的话,堆内存可以由⽤户⾃⾏配置,堆内存在heap1.c、heap2.c、heap3.c、heap4.c和heap5.c中有定义,具体在哪⼀个⽂件,取决于选择的内存管理⽅式。
例如我们使⽤了heap4.c,在heap4.c中就有如图所⽰的定义:当宏configAPPLICATION_ALLOCATED_HEAP配置为1的时候,需要⽤户⾃⾏配置堆内存ucHeap,否则由编译器分配。
2.configASSERT断⾔,类似C库中的assert()函数,调试代码的时候判断传⼊的参数是否合理。
freertos手册
freertos手册
FreeRTOS是一个实时操作系统(RTOS),提供多任务管理和实时调度功能。
以下是FreeRTOS的手册概述:
1. 简介:介绍FreeRTOS的特点、功能和适用场景,以及其核心概念如任务、队列、信号量等。
2. 快速上手:指导用户如何下载和配置FreeRTOS,以及如何编写和调试第一个FreeRTOS程序。
3. 任务管理:详细介绍如何创建、删除和查询任务。
包括任务的优先级、状态以及如何实现任务的同步和通信。
4. 内存管理:介绍FreeRTOS的内存管理机制,包括静态内存和动态内存的分配和使用。
5. 事件队列:介绍事件队列的概念和使用方法,包括如何发送和接收事件,以及如何使用事件队列实现任务的同步和通信。
6. 信号量:介绍信号量的概念和使用方法,包括如何使用信号量实现任务的同步和互斥。
7. 互斥锁:介绍互斥锁的概念和使用方法,包括如何使用互斥锁实现任务的互斥访问共享资源。
8. 中断管理:介绍FreeRTOS的中断管理机制,包括中断的优先级、处理函数以及如何使用中断实现任务的调度。
9. 系统监控:介绍如何使用FreeRTOS提供的系统监控功能,如任务堆栈溢出检测、系统运行时间统计等。
10. 移植性:介绍FreeRTOS在不同处理器和开发环境下的移植方法。
11. 常见问题与解决方案:总结FreeRTOS使用过程中可能遇到的问题,并提供相应的解决方案。
总之,FreeRTOS手册是一个全面而详细的指南,可以帮助用户快速上手并深入了解FreeRTOS的使用方法和技巧。
正点原子freertos开发指南_概述及解释说明

正点原子freertos开发指南概述及解释说明1. 引言1.1 概述在嵌入式系统领域,实时操作系统(RTOS)成为了开发者必备的工具之一。
正点原子freertos是一种流行的RTOS,广泛应用于嵌入式设备的开发和设计中。
本文旨在提供一份详尽的指南,帮助读者理解和使用正点原子freertos。
1.2 文章结构本文将按照以下结构进行介绍和讲解。
首先,我们将在引言部分对文章进行概述,并阐明文章的目的。
然后,在正文部分,将深入讨论正点原子freertos的开发指南。
接着,在解释说明部分,我们将详细解析正点原子freertos中的核心概念,并展开讲解任务调度器以及任务通信与同步机制。
最后,在结论部分对整个开发指南进行总结。
1.3 目的本文的目的是提供读者全面而又易于理解的资料,来帮助初学者迅速上手并熟练使用正点原子freertos。
通过本文,读者将了解到这款RTOS的基本概念、特点与优势,并能够掌握它在嵌入式设备开发中所扮演的角色和功能。
同时,本文还旨在通过详细的解释说明部分,帮助读者深入理解正点原子freertos中的核心概念以及相关机制的运作原理。
最后,本文将通过总结部分,使读者对于整个开发指南有一个完整而清晰的认识。
这篇文章将成为初学者入门正点原子freertos开发所不可或缺的书籍,并且也非常适合已经有一定基础知识的开发人员参考和进一步提高。
我们相信,在阅读本文后,读者将能够充分了解并掌握正点原子freertos的开发过程和相关概念,从而在嵌入式系统领域取得更好的成果。
2. 正文:正文部分将详细介绍正点原子freertos的开发相关内容。
主要包括以下几个方面:2.1 什么是正点原子freertos正点原子freertos是一款基于实时操作系统(RTOS)的开发平台,专注于嵌入式系统开发。
它提供了一套完整且易于使用的工具和库,帮助开发者快速构建可靠、高效的嵌入式应用程序。
2.2 freertos的架构和特性我们将介绍freertos的整体架构和核心特性。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
FreeRTOS初步(转)用了半天时间对FreeRTOS有了一个初步的认识,大概总结一下,其中混杂了系统实现和实际应用方面的问题。
现只是以应用为目的,实现方面待以后进一步研究。
1.FreeRTOS提供的功能包括:任务管理、时间管理、信号量、消息队列、内存管理。
与平台有关的文件包含在portable文件夹中,主要是port.c, portmacro.h两个文件。
平台无关的文件主要是:list.c(基本链表结构), queue.c(包括消息队列,信号量的实现), croutine.c,tasks.c(任务管理,时间管理)。
命名协定RTOS内核与范例程序源代码使用下面的协定:变量char类型的变量以 c 为前缀short类型的变量以 s 为前缀long类型的变量以 l 为前缀float类型的变量以 f 为前缀用了半天时间对FreeRTOS有了一个初步的认识,大概总结一下,其中混杂了系统实现和实际应用方面的问题。
现只是以应用为目的,实现方面待以后进一步研究。
1.FreeRTOS提供的功能包括:任务管理、时间管理、信号量、消息队列、内存管理。
与平台有关的文件包含在portable文件夹中,主要是port.c, portmacro.h两个文件。
平台无关的文件主要是:list.c(基本链表结构), queue.c(包括消息队列,信号量的实现), croutine.c,tasks.c(任务管理,时间管理)。
命名协定RTOS内核与范例程序源代码使用下面的协定:变量char类型的变量以 c 为前缀short类型的变量以 s 为前缀long类型的变量以 l 为前缀float类型的变量以 f 为前缀double类型的变量以 d 为前缀枚举变量以 e 为前缀其他类型(如结构体)以 x 为前缀指针有一个额外的前缀 p , 例如short类型的指针前缀为 ps无符号类型的变量有一个额外的前缀 u , 例如无符号short类型的变量前缀为 us函数文件内部函数以prv为前缀API函数以其返回值类型为前缀,按照前面对变量的定义函数的名字以其所在的文件名开头。
如vTaskDelete函数在Task.c文件中定义数据类型数据类型并不直接在RTOS内核内部引用。
相反,每个平台都有其自身的定义方式。
例如,char类型定义为portCHAR,short类型定义为portSHORT等。
范例程序源代码使用的就是这种符号,但这并不是必须的,你可以在你的程序中使用任何你喜欢的符号。
此外,有两种额外的类型要为每种平台定义。
分别是:portTickType可配置为16位的无符号类型或32位的无符号类型。
参考API文档中的定制部分获取详细信息。
portBASE_TYPE为特定体系定义的最有效率的数据类型。
如果portBASE_TYPE定义为char则必须要特别小心的保证用来作为函数返回值的signed char可以为负数,用于指示错误。
2. FreeRTOS内核支持优先级调度算法,每个任务可根据重要程度的不同被赋予一定的优先级,CPU总是让处于就绪态的、优先级最高的任务先运行。
FreeRT0S内核同时支持轮换调度算法,系统允许不同的任务使用相同的优先级,在没有更高优先级任务就绪的情况下,同一优先级的任务共享CPU的使用时间。
3.freertos既可以配置为可抢占内核也可以配置为不可抢占内核。
当FreeRTOS被设置为可剥夺型内核时,处于就绪态的高优先级任务能剥夺低优先级任务的CPU使用权,这样可保证系统满足实时性的要求;当FreeRTOS被设置为不可剥夺型内核时,处于就绪态的高优先级任务只有等当前运行任务主动释放CPU的使用权后才能获得运行,这样可提高CPU的运行效率。
4.任务管理系统为每个任务分配一个TCB结构typedef struct tskTaskControlBlock{volatile portSTACK_TYPE *pxTopOfStack;//指向堆栈顶xListItem xGenericListItem; //通过它将任务连入就绪链表或者延时链表或者挂起链表中, xListItem包含其TCB指针xListItem xEventListItem;//通过它把任务连入事件等待链表unsigned portBASE_TYPE uxPriority;//优先级portSTACK_TYPE *pxStack; //指向堆栈起始位置signed portCHAR pcTaskName[ configMAX_TASK_NAME_LEN ]; 。
省略一些次要结构} tskTCB;系统的全局变量:static xList pxReadyTasksLists[ configMAX_PRIORITIES ]; 就绪队列static xList xDelayedTaskList1;static xList xDelayedTaskList2; 两个延时任务队列static xList * volatile pxDelayedTaskList;static xList * volatile pxOverflowDelayedTaskList; 两个延时队列的指针,应该是可互换的。
static xList xPendingReadyList;static volatile xList xTasksWaitingTermination; 等待结束队列static volatile unsigned portBASE_TYPE uxTasksDeleted = ( unsignedportBASE_TYPE ) 0; 结束队列中的个数?????static xList xSuspendedTaskList; 挂起队列static volatile unsigned portBASE_TYPE uxCurrentNumberOfTasks;记录了当前系统任务的数目static volatile portTickType xTickCount;是自启动以来系统运行的ticks数static unsigned portBASE_TYPE uxTopUsedPriority;记录当前系统中被使用的最高优先级,static volatile unsigned portBASE_TYPE uxTopReadyPriority;记录当前系统中处于就绪状态的最高优先级。
static volatile signed portBASE_TYPE xSchedulerRunning ;表示当前调度器是否在运行,也即内核是否启动了任务建立和删除,挂起和唤醒5.时间管理操作系统总是需要个时钟节拍的,这个需要硬件支持。
freertos同样需要一个time tick 产生器,通常是用处理器的硬件定时器来实现这个功能。
(时间片轮转调度中和延时时间控制??)它周期性的产生定时中断,所谓的时钟节拍管理的核心就是这个定时中断的服务程序。
freertos的时钟节拍isr中除去保存现场,灰度现场这些事情外,核心的工作就是调用vTaskIncrementTick()函数。
vTaskIncrementTick()函数主要做两件事情:维护系统时间(以tick为单位,多少个节拍);处理那些延时的任务,如果延时到期,则唤醒任务。
任务可用的延时函数:vTaskDelay();vTaskDelayUntil();特别之处在于vTaskDelayUntil()是一个周期性任务可以利用它可以保证一个固定的(确定的)常数执行频率,而vTaskDelay()无法保证。
6.任务间的通信(详见“FreeRTOS任务间通讯”)1)当然可以用全局变量的形式通信,但是不安全。
2)队列(xQueueHandle)是FreeRTOS中通信所需的主要数据结构。
3)信号量(xSemaphoreHandle),有二进制信号量,计数信号量和互斥信号量,其都是以队列为基础结构建立。
二进制信号量可以用于中断和任务间的同步。
也就是说希望任务随外部中断而执行。
即外设给出“数据已就绪”信号,系统中断,任务收到此中断信号接收数据。
互斥一般用于都共享资源或数据结构的保护。
因为任务调度不能保证数据不被破坏。
当一个任务需要访问资源,它必须先获得 ('take') 令牌;当访问结束后,它必须释放令牌 - 允许其他任务能够访问这个资源。
(对此还有待进一步实验研究)。
7.系统配置freeRTOS 配置在:FREERTOS_CONFIG.H 里面,条目如下:/* 是否配置成抢先先多任务内核,是1的时候,优先级高的任务优先执行。
为0任务就没有优先级之说,用时间片轮流执行 */#define configUSE_PREEMPTION 1/* IDLE任务的HOOK函数,用于OS功能扩展,需要你自己编相应函数,名字是void vApplicationIdleHook( void ) */#define configUSE_IDLE_HOOK 0/* SYSTEM TICK的HOOK函数,用于OS功能扩展,需要你自己编相应函数,名字是void vApplicationTickHook(void ) */#define configUSE_TICK_HOOK 0/* 系统CPU频率,单位是Hz */#define configCPU_CLOCK_HZ 58982400/* 系统SYSTEM TICK每秒钟的发生次数,数值越大系统反应越快,但是CPU用在任务切换的开销就越多 */#define configTICK_RATE_HZ 250/* 系统任务优先级数。
5 说明任务有5级优先度。
这个数目越大耗费RAM越多 */#define configMAX_PRIORITIES 5/* 系统最小堆栈尺寸,注意128不是128字节,而是128个入栈。
比如ARM32位,128个入栈就是512字节 */#define configMINIMAL_STACK_SIZE 128/* 系统可用内存。
一般设成除了操作系统和你的程序所用RAM外的最大RAM。
比如20KRAM你用了2K,系统用了3K,剩下15就是最大HEAP 尺寸。
你可以先设小然后看编译结果往大里加*/#define configTOTAL_HEAP_SIZE 10240/* 任务的PC名字最大长度,因为函数名编译完了就不见了,所以追踪时不知道哪个名字。
16表示16个char */#define configMAX_TASK_NAME_LEN 16/* 是否设定成追踪,由PC端TraceCon.exe记录,也可以转到系统显示屏上 */#define configUSE_TRACE_FACILITY 0/* 就是SYSTEM TICK的长度,16是16位,如果是16位以下CPU,一般选1;如果是32位系统,一般选0 */#define configUSE_16_BIT_TICKS 0/* 简单理解以下就是和IDLE TASK同样优先级的任务执行情况。