One-class svm for learning in image retrieval
支持向量机(SVM)、支持向量机回归(SVR):原理简述及其MATLAB实例
支持向量机(SVM)、支持向量机回归(SVR):原理简述及其MATLAB实例一、基础知识1、关于拉格朗日乘子法和KKT条件1)关于拉格朗日乘子法2)关于KKT条件2、范数1)向量的范数2)矩阵的范数3)L0、L1与L2范数、核范数二、SVM概述1、简介2、SVM算法原理1)线性支持向量机2)非线性支持向量机二、SVR:SVM的改进、解决回归拟合问题三、多分类的SVM1. one-against-all2. one-against-one四、QP(二次规划)求解五、SVM的MATLAB实现:Libsvm1、Libsvm工具箱使用说明2、重要函数:3、示例支持向量机(SVM):原理及其MATLAB实例一、基础知识1、关于拉格朗日乘子法和KKT条件1)关于拉格朗日乘子法首先来了解拉格朗日乘子法,为什么需要拉格朗日乘子法呢?记住,有需要拉格朗日乘子法的地方,必然是一个组合优化问题。
那么带约束的优化问题很好说,就比如说下面这个:这是一个带等式约束的优化问题,有目标值,有约束条件。
那么你可以想想,假设没有约束条件这个问题是怎么求解的呢?是不是直接 f 对各个 x 求导等于 0,解 x 就可以了,可以看到没有约束的话,求导为0,那么各个x均为0吧,这样f=0了,最小。
但是x都为0不满足约束条件呀,那么问题就来了。
有了约束不能直接求导,那么如果把约束去掉不就可以了吗?怎么去掉呢?这才需要拉格朗日方法。
既然是等式约束,那么我们把这个约束乘一个系数加到目标函数中去,这样就相当于既考虑了原目标函数,也考虑了约束条件。
现在这个优化目标函数就没有约束条件了吧,既然如此,求法就简单了,分别对x求导等于0,如下:把它在带到约束条件中去,可以看到,2个变量两个等式,可以求解,最终可以得到,这样再带回去求x就可以了。
那么一个带等式约束的优化问题就通过拉格朗日乘子法完美的解决了。
更高一层的,带有不等式的约束问题怎么办?那么就需要用更一般化的拉格朗日乘子法,即KKT条件,来解决这种问题了。
oneclasssvm原理
oneclasssvm原理
One-Class SVM(支持向量机)是一种用于异常检测的机器学习算法。
它的原理基于支持向量机的思想,旨在通过构建一个边界来区分正常样本和异常样本。
One-Class SVM的原理可以分为以下几个步骤:
1. 数据预处理:首先,将训练数据集中的正常样本作为训练样本,不包含异常样本。
这些正常样本被假设为来自同一分布。
2. 特征转换:接下来,对训练样本进行特征转换,将其映射到高维空间中。
这可以通过使用核函数(如线性核、多项式核或高斯核)来实现。
3. 构建边界:在高维空间中,One-Class SVM试图找到一个超平面,使得正常样本位于超平面的一侧,而异常样本位于另一侧。
这个超平面被称为决策边界。
4. 寻找支持向量:One-Class SVM选择离决策边界最近的一些正常样本作为支持向量。
这些支持向量将决定决策边界的位置。
5. 异常检测:对于新的未知样本,通过计算其在高维空间中与决策边界的距离来进行异常检测。
如果距离超过某个阈值,那么该样本被判定为异常。
One-Class SVM的原理基于正常样本的分布特点,通过构建一个边界来区分正常样本和异常样本。
它在异常检测领域有着广泛的应用,例如网络入侵检测、欺诈检测等场景。
one-class分类方法
one-class分类方法一类分类(One-Class Classification)是指仅有一种已知类别的分类问题,这种方法广泛应用于异常检测、数据压缩等领域。
一类分类方法主要用于从一个数据集中找出属于“正常”类的样本,而不是识别“异常”类的样本,因此称为单类分类或异常检测。
一类分类方法的目标是将“正常”和“异常”样本分离开来,通过学习“正常”样本的特点来建立模型。
当新的样本进入系统时,模型将通过计算其与“正常”样本的差异来决定其是属于“正常”还是“异常”类。
在实际应用中,一类分类方法遇到了许多实际问题,如数据分布不均匀、样本数据过少等。
近年来,研究者们已经为这些问题提出了多种解决方法。
接下来,我们将介绍一些经典的一类分类方法及其应用情况。
1. One-Class SVM支持向量机(Support Vector Machine,SVM)是机器学习中常用的一种分类算法。
在一类分类问题中,SVM被扩展为一类分类SVM(One-Class SVM)。
在一类分类SVM中,模型只考虑正样本。
模型的目标是找到一个超平面,将正样本分离出来,同时最小化这个超平面与其他点之间的距离。
通过这种方法,模型可以自适应地选择一个最优符合数据分布的超平面,并将“正常”样本与“异常”样本分开。
One-Class SVM适用于高维空间和非线性分类。
实际应用中的例子有:文本分类、图像分类、医学诊断、网络安全等领域。
2. Deep One-Class Classification深度一类分类(Deep One-Class Classification)通过深度神经网络模型加强了一类分类的性能。
该方法通过从数据集中提炼特征,优化数据的表示,从而提高一类分类的效果。
深度神经网络模型包含一系列的隐藏层和非线性激活函数。
通过前向传播,网络模型可以从原始数据中学习到高级特征,并在后续层中优化这些特征。
与传统的一类分类不同,深度一类分类方法不仅仅是为了提取特征,更希望深度模型能够更好地拟合数据分布,从而提高一类分类的精度和鲁棒性。
单类支持向量机(One-ClassSVM)
单类⽀持向量机(One-ClassSVM)假如现在有ℓ个同⼀分布的观察数据,每条数据都有p个特征。
如果现在加⼊⼀个或多个观察数据,那么是否这些数据与原有的数据⼗分不同,甚⾄我们可以怀疑其是否属于同⼀分布呢?反过来讲,是否这些数据与原有的数据⼗分相似,我们⽆法将其区分呢?这便是异常检测⼯具和⽅法需要解决的问题。
即现在只有正常的数据,那么当异常数据加⼊时,我们是否可以将其分辨出来呢?通常情况下,要学习训练出⼀个在p维空间上的粗糙封闭的边界线,来分割出初始观测分布的轮廓线。
然后,如果观测数据位于边界限定的⼦空间内,则认为它们来⾃与初始观测相同的总体。
否则,如果他们在边界之外,我们可以在⼀定程度上说他们是异常的。
OCSVM⼀种实现⽅法是 One-Class SVM (OCSVM),⾸次是在论⽂《Support Vector Method for Novelty Detection》中由 Bernhard Schölkopf 等⼈在 2000 年提出,其与 SVM 的原理类似,更像是将零点作为负样本点,其他数据作为正样本点,来训练⽀持向量机。
策略是将数据映射到与内核相对应的特征空间,在数据与原点间构建超平⾯,该超平⾯与原点呈最⼤距离。
现在假设该超平⾯为:w⋅Φ(x)−ρ=0⽬标就是在分类正确的基础上最⼤化超平⾯与原点的距离:max同时根据超平⾯的定义,实际上\rho的正负和w向量中的元素正负同时调整就不会影响超平⾯,那么假如\rho > 0,那么优化问题可以重写为:\mathop{ \max} \limits_ { w \in F , \rho \in \mathbb { R } } { \rho} / { \| w \| ^ { 2 }}为了防⽌参数求解的耦合问题,可以将其拆解为\begin{aligned} \mathop{ \max} \limits_ { w \in F , \rho \in \mathbb { R } } { \rho} + 1/{ \| w \| ^ { 2 }} \\ \mathop{ \min} \limits_ { w \in F , \rho \in\mathbb { R } } - { \rho} + { \| w \| ^ { 2 }} \end{aligned}这样的话在求解问题时,由于w向量中元素的整体正负不会影响{ \| w \| ^ { 2 }}的取值,那么其会保证\rho的最终取值为正值,也就是满⾜假设。
SVM模式识别与回归软件包(LibSVM)详解
SVM模式识别与回归软件包——LibSVMLIBSVM是台湾大学林智仁(Lin Chih-Jen)副教授等开发设计的一个简单、易于使用和快速有效的SVM模式识别与回归的软件包,他不但提供了编译好的可在Windows系列系统的执行文件,还提供了源代码,方便改进、修改以及在其它操作系统上应用;该软件对SVM所涉及的参数调节相对比较少,提供了很多的默认参数,利用这些默认参数可以解决很多问题;并提供了交互检验(Cross Validation)的功能。
该软件包可在.tw/~cjlin/免费获得。
该软件可以解决C- SVM、ν-SVM、ε-SVR和ν-SVR等问题,包括基于一对一算法的多类模式识别问题。
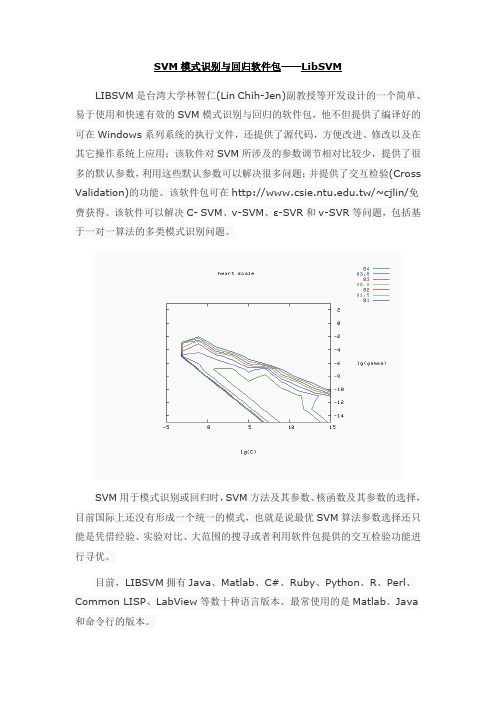
SVM用于模式识别或回归时,SVM方法及其参数、核函数及其参数的选择,目前国际上还没有形成一个统一的模式,也就是说最优SVM算法参数选择还只能是凭借经验、实验对比、大范围的搜寻或者利用软件包提供的交互检验功能进行寻优。
目前,LIBSVM拥有Java、Matlab、C#、Ruby、Python、R、Perl、Common LISP、LabView等数十种语言版本。
最常使用的是Matlab、Java 和命令行的版本。
就要做有关SVM的报告了!由于SVM里面的有关二次优化的不是那么容易计算得到的,最起码凭借我现在的理论知识和编程能力是不能达到!幸好,现在又不少的SVM工具,他可以帮助你得到支持向量(SV),甚至可以帮助你得到预测结果,归一化数据等等。
其中SVM-light,LibSVM是比较常用的!SVM-light我们实验室有这方面的代码,而我自己就学习了下怎么使用LIBSVM(来自台湾大学林智仁)。
实验步骤如下:1:首先安装LIBSVM,这个不用多说,直接去他的官网上看:.tw/~cjlin/libsvm/index.html2:处理数据,把数据制作成LIBSVM的格式,其每行格式为:label index1:value1 index2:value2 ...其中我用了复旦的分类语料库,当然我先做了分词,去停用词,归一化等处理了3:使用svm-train.exe训练,得到****.model文件。
SVM Aggregation SVM, SVM Ensemble, SVM Classification Tree

SVM Aggregation: SVM, SVM Ensemble, SVM Classification TreeBy Shaoning Pang1. IntroductionSupport Vector Machine (SVM), since first proposed by Vapnik and his group at AT\&T laboratory has been extensively studied and discussed to develop its working principle of classification and regression. As a result, different types of SVM and SVM extensions [1] have been proposed. Suykens introduced the quadratic cost function in SVM and proposed LSSVM (Least Squares Support Vector Machine). Mangasarian et al. used an implicit Lagrangian reformulation in SVM, and proposed LSVM (Lagrangian Support Vector Machine) and NSVM (Newton Support Vector Machine). Later, Lee and Mangasarian used a smooth unconstrained optimization in SVM, and had SSVM (Smooth Support Vector Machine). Recently, new interesting SVM models were published, such as, Chun-fu Lin's FSVM (Fuzzy Support Vector Machine). Zhang et al proposed HSSVMs (Hidden Space Support Vector Machines). Shilton et al. proposed an incremental version of SVM. All these SVM types have significantly enhanced the original SVM performance. Most importantly, they have applied the original SVM to suit different real application needs.SVM aggregation, as an alternative aspect of SVM study, specializes on combining a family of concurrent SVMs for advanced artificial intelligence. The well known SVM aggregation methods are the One-against-all and One-against-one methods. The purpose of such aggregations is to expand SVM binary classification to multi-class classification. A typical procedure of SVM aggregation can be summarized as three steps, SVM model selection, convex aggregation, and aggregation training.Over the last 5 years, I have been working on SVM aggregation, and have developed the original single SVM classification in our previous work, to SVM ensemble for classification, SVM classification tree (including 2-class SVM tree (2-SVMT), and Multi-class SVMT tree (m-SVMT)). Evolving SVM classification tree is an ongoing research topic of adapting SVMTto the incremental learning of data stream by evolving SVM and SVM tree structure.2. SVM EnsembleIn SVM ensemble, individual SVMs are aggregated to make a collective decision in several ways such as the majority voting, least-squares estimation-based weighting, and the double layer hierarchical combing. The training SVM ensemble can be conducted in the way of bagging or boosting. In bagging, each individual SVM is trained independently using the randomly chosen training samples via a boostrap technique. In boosting, each individual SVM is trained using the training samples chosen according to the sample’s probability distribution that is updated in proportion to the error in the sample. SVM ensemble is essentially a type of cross-validation optimization of single SVM, having a more stable classification performance than other models. The details on SVM ensemble construction and application are described in [2,3].3. 2-class SVM Tree (2-SVMT)The principle of SVMT is to encapsulate a number of binary SVMs into a multi-layer hierarchy by adapting a "divide and conquer" strategy. The benefits of SVMT model can be summarized as: (1) SVMT is capable of effectively reducing classification difficulties from class mixture and overlap through a supervised LLE data partitioning.(2) Importantly, SVMT outperforms single SVM and SVM ensemble on the robustness to class imbalance.A 2-class SVM tree can be modeled under the ‘depth first’ policy. The employed partitioning function for depth first is a binary data splitting whose targeting function is to partition all samples of class 1 into one cluster and all samples of class 2 into the other cluster. 2-SVMT of this type is particularly useful for the 2-class task with serious class overlap. Fig 1 shows an example of 2-class SVM binary tree over a face membership authentication [3,4] case with 30 of 271 persons as membership group.Fig. 1.Example of 2-class SVM binary treeAlternatively, a 2-class SVM tree also can be modeled under the ‘width first’ policy, where the employed partitioning function is a multiple data splitting, and the targeting function for partitioning here is to steer data samples in the same cluster with the same class label. A multiple data splitting is capable of controlling the size of the tree to a limited size, which is very optimal for decision making in such a tree structural model. Fig 3 gives an example of 2-class SVM multiple tree over the same case of face membership authentication as Fig. 2.Fig. 2.Example of 2-class SVM multiple tree.3. multi-class SVM Tree (m -SVMT)The above SVMTs are merely two-class SVM classification tree (2-SVMT) model, which are not sustainable for normal multi-class classification tasks. However in real application, class imbalance of multi-class problem is also a critical challenge for most classifiers, thus it is desirable to develop a multi-class SVM tree with the above properties of 2-SVMT.Fig. 3.Example m-SVMT over a 3 class taskThe construction of m-SVMT [9] is to decompose an m -class task into a certain number of 1-m classes regional tasks, under the criterion of minimizing SVM tree loss function. The proposed m-SVMT is demonstrated very competitive in discriminability as compared to other typical classifiers such as single SVMs, C4.5, K-NN, and MLP neural network, and particularly has a superior robustness to class imbalance, which other classifiers can not match. Fig.3 gives an example of m-SVMT for a 3-class task.4. Evolving SVMT, an ongoing research topicLearning over datasets in real-world application, we often confront difficult situations where a complete set of training samples is not given in advance. Actually in most of cases, data is being presented as a data stream where we can not know what kind of data, even what class of data, is coming in the future. Obviously, one-pass incremental learning gives a method to deal with such data streams [8,9].For the needs of incremental learning over data stream, I am working to realize a concept of evolving SVM classification tree (eSVMT) for the classification of streaming data, where chunks of data is being presented at different time. The constructed eSVMT is supposed to be capable of accommodating new data by adjusting SVM classification tree as in the simulation shown in Fig. 4.Fig.4. A simulation of evolving SVM classification treeT=1 T=2 T=3T=4T=5The difficulty for eSVMT modelling is, (1) eSVMT needs to acquire knowledge with a single presentation of training data, and retaining the knowledge acquired in the past without keeping a large number of training samples in memory. (2) eSVMT needs to accommodate new data continuously, while always keeping a good size of SVM tree structure, and a good classification in real time.Acknowledgement:The research reported in the article was partially funded by the ministry of Education, South Korea under the program of BK21, and the New Zealand Foundation for Research, Science and Technology under the grant: NERF/AUTX02-01. Also the author would like to present the thanks to Prof. Nik Kasabov of Auckland University of Technology, Prof. S. Y.Bang, and Prof. Dajin Kim of Pohang University of Science and Technology, for their support and supervision during 2001 to 2005, when most of the reported research in this article was carried out.References:1.;; /dmi/2.Hyun-Chul Kim, Shaoning Pang, Hong-Mo Je, Daijin Kim, Sung Yang Bang: Constructing support vector machine ensemble. Pattern Recognition vol. 36, no. 12, pp. 2757-2767, 20033.Shaoning Pang, D. Kim, S. Y. Bang, Membership authentication in the dynamic group by face classification using SVM ensemble. Pattern Recognition Letters, vol. 24, no. (1-3), pp. 215-225, 2003.4.Shaoning Pang, D. Kim, S. Y. Bang, Face Membership Authentication Using SVM Classification Tree Generated by Membership-based LLE Data Partition, IEEE Trans. on Neural Network, vol. 16 no. 2, pp. 436-446, 2005.5.Shaoning Pang, Constructing SVM Multiple Tree for Face Membership Authentication. ICBA 2004, Lecture Notes in Computer Science 3072, pp. 37-43, Springer 2004.6.Shaoning Pang, Seiichi Ozawa, Nikola Kasabov, One-pass Incremental Membership Authentication by Face Classification. ICBA 2004, Lecture Notes in Computer Science 3072, pp. 155-161, Springer 2004.7.Shaoning Pang, and Nikola Kasabov, Multi-Class SVM Classification Tree, (submitted), 2005.8. Shaoning Pang, Seiichi Ozawa and Nik Kasabov, Incremental Linear Discriminant Analysis for Classification of Data Streams ,IEEE Trans. on System, Man, and Cybernetics-Part B, vol. 35, no. 5, pp. 905 – 914, 20059.Seiichi Ozawa, Soon Toh, Shigeo Abe, Shaoning Pang and Nikola Kasabov, Incremental Learning for Online Face Recognition, Neural Network, vol.18, no. (5-6), pp. 575-584, 2005.Dr. Shaoning PANGKnowledge Engineering & Discovery Research Institute Auckland University of Technology, New Zealand Email: spang@。
一种新的基于SVM的相关反馈图像检索算法_许月华

本文提出了一种新的基于的相关反馈算法。
我们SVM 认为检索过程中的样本集合是一个动态增长的集合。
对于用户每次反馈的图像,可以分为感兴趣的样本正例和不感兴()趣的样本反例两类,用来更新原有的样本集合。
通过不断()的积累,样本集合会逐渐达到学习的要求,从而解决SVM 上述算法中样本不足的困难。
本文算法的第个改进之处在2于考虑了检索过程中历史信息的利用。
每一次新的反馈之后,旧的权值经过衰减和新的权值共同决定图像库中所有图像的排序。
实验结果证明了文中算法的有效性和系统检索能力的提高。
支持向量机1 (SVM)给定线性可分样本(x i ,y i …),i=1,,N, y i ∈,,{-11}x i ∈R d 。
0b w x+=⋅假定某个超平面可以将正例与反例分开称之为(()g x b w x =+⋅分类超平面,对应分类函数为。
最优分类) 面是令正例和反例之间的距离最大化的分类超平面。
将g(x )w 归一化之后,求解最优分类面的问题等价于最小化,目标函数为:2min ()12w w Φ= (1)()10i i y w x b ⋅+−≥公式的约束条件为:(1)i=1, 2, … , N i α定义个算子N Lagrange ,i=1,…。
求解该二次优化, N ∑==N i i i i x w y 1αx i 问题,可以得到最优分类面,其中,是 位于分类间隔面上的样本,称为支持向量。
分类函数为:()()b y sign f x x x i i i i +•=∑α (2)在数据不是线性可分的情况下,一方面,引入惩SVM 罚系数和松弛系数C ξi ,…,修改目标函数为:i=1, , N()()()11,2Ni C w w w φξ•=+∑⋅(3)另外,注意到公式中仅仅出现了点积的形式(2)xx ji •。
假设先将数据映射到某个欧氏空间,映射ψ:H ψ : R d →H ()()i j x x Ψ•Ψ则公式中的点积转化为中的点积。
一种新的中文文本分类算法-One ClassSVM—KNN算法
A w x a sfc t n Alo i mm On a s S Ne Te tCl si a i g rt i o h e Cls VM - KNN
LI W e WU e U n, Ch n
( h p nn a oa r f n lgn C m uigJ n s nvr t o c neadT cn l y T eO eigL b rt yo t l et o p t 。i guU i sy f i c n eh oo 。 o Iei n a e i S e g
及存 储和 计算 的开销 大等缺 陷 。单 类 S M对 只有 一类 的分类 问题 具有 很好 的效果 , 不适 用 于 多类 分类 问题 , V 但 因此针 对 K N存 在 的缺陷及 单类 S M 的特 点提 出 O eCas V K N算法 , 给 出 了算 法 的定 义及 详 细分 析 。通过 实 验 证 明此 N V n l M— N sS 并
Z ej n 10 3 C ia hni g22 0 。hn ) a
Ab t a t T x l s i c t n i d l s d i aa s n e r h e g n . s r c : e tca s ai s wi e y u e n d tba e a d s ac n i e KNN s wi e y u e n Ch n s e tc t g rz t n, o v r i f o i d l s d i i e e tx ae o ia o h we e 。 i KNN a n e e t n t e a p ia o ftx l s i c t n. e d fce c fKNN l sf ai n ag r m st a l t e tan n a h s ma y d f cs i h p l t n o tca sf a o Th e in y o ci e i i i ca i c t l o t s i o i h i t l i i g s m- h a h r
基于SVM预分类学习的图像超分辨率重建算法
g rt m a e trr c nsr t n p ro ma c h n t e e a o ih h sa b te e o tuci ef r n e t a h x mpl- s d ag rt m ,wh c mprve h r g a r nnng s e d o e ba e lo ih ihi o st e p o r m u i p e i h e o iin o c ur c n t e prc ndto fa c a y.
是将原本空间 函数为
, )=sn ∑ yo ( ・ +6 ( g( i ) ) t () 1
类信息存储 在样本库 中; 然后 在输 入 L R图像块进行 匹配搜索
前, 算法通过 S M 的预分类选择对应要搜索的样本 子集 ; V 最后 在高频预测阶段 直接从颜 色特征相近 的样本子集 中进行精确 匹配搜索。 算法采用小样本学 习能力非常 强 的 S M作 为分类 器 , V 确 定 与测试 L R图像块颜色特征相似的样本子库进行 精确搜索 , 排 除了内容相关性不强的样本 , 从而缩短 了算法运行 时 间, 大 大 降低 了误匹配概率 , 提高 了图像的重建质量 。 2 1 图像的颜色特征 . 图像 的颜色特征是一种全局特征 , 描述 了图像或 图像 区域 所对应 的表面性质 , 它是 图像物理特 征中最直接 的视觉特 征。
支持向量机(SVM)、支持向量机回归(SVR):原理简述及其MATLAB实例
支持向量机(SVM)、支持向量机回归(SVR):原理简述及其MATLAB实例一、基础知识1、关于拉格朗日乘子法和KKT条件1)关于拉格朗日乘子法2)关于KKT条件2、范数1)向量的范数2)矩阵的范数3)L0、L1与L2范数、核范数二、SVM概述1、简介2、SVM算法原理1)线性支持向量机2)非线性支持向量机二、SVR:SVM的改进、解决回归拟合问题三、多分类的SVM1. one-against-all2. one-against-one四、QP(二次规划)求解五、SVM的MATLAB实现:Libsvm1、Libsvm工具箱使用说明2、重要函数:3、示例支持向量机(SVM):原理及其MATLAB实例一、基础知识1、关于拉格朗日乘子法和KKT条件1)关于拉格朗日乘子法首先来了解拉格朗日乘子法,为什么需要拉格朗日乘子法呢?记住,有需要拉格朗日乘子法的地方,必然是一个组合优化问题。
那么带约束的优化问题很好说,就比如说下面这个:这是一个带等式约束的优化问题,有目标值,有约束条件。
那么你可以想想,假设没有约束条件这个问题是怎么求解的呢?是不是直接 f 对各个 x 求导等于 0,解 x 就可以了,可以看到没有约束的话,求导为0,那么各个x均为0吧,这样f=0了,最小。
但是x都为0不满足约束条件呀,那么问题就来了。
有了约束不能直接求导,那么如果把约束去掉不就可以了吗?怎么去掉呢?这才需要拉格朗日方法。
既然是等式约束,那么我们把这个约束乘一个系数加到目标函数中去,这样就相当于既考虑了原目标函数,也考虑了约束条件。
现在这个优化目标函数就没有约束条件了吧,既然如此,求法就简单了,分别对x求导等于0,如下:把它在带到约束条件中去,可以看到,2个变量两个等式,可以求解,最终可以得到,这样再带回去求x就可以了。
那么一个带等式约束的优化问题就通过拉格朗日乘子法完美的解决了。
更高一层的,带有不等式的约束问题怎么办?那么就需要用更一般化的拉格朗日乘子法,即KKT条件,来解决这种问题了。
基于OneclassSVM的噪声图像分割方法
Key words: image segmentation; image noise; One-class Support-Vector-Machine ( SVM) ; outlier detection; energy term
( College of Information and Computer, Taiyuan University of Technology, Taiyuan Shanxi 030024, China)
Abstract: To deal with poor robustness in strong noise environment, weak adaptability to complex mixed noise that appear in the existing unsupervised image segmentation models, an improved noise-robust image segmentation model based on One-class SVM ( Support Vector Machine) method was proposed. Firstly, a data outlier detection mechanism was constructed based on One-class SVM. Secondly, an outlier degree was introduced into the energy function, so that more accurate image information could be obtained by the proposed model under multiple noise intensities and the failure of weight-descend mechanism in strong noise environment was avoided. Finally, the segmentation contour was driven to the target edge by minimizing the energy function. In noise image segmentation experiments, the proposed model could obtain ideal segmentation results with different types and intensities of noise. Under F1 -score metric, the proposed model is 0. 2 to 0. 3 higher than LCK ( Local Correntropy-based K-means ) model, and has better stability in strong noise environments. The segmentation convergence time of the proposed model is only slightly longer than that of LCK model by about 0. 1 s. Experimental results show that the proposed model is more robust to probabilistic, extreme values and mixed noise without significantly increase of segmentation time, and can segment natural images with noise.
基于One-Class SVM的青鳉鱼异常行为识别方法
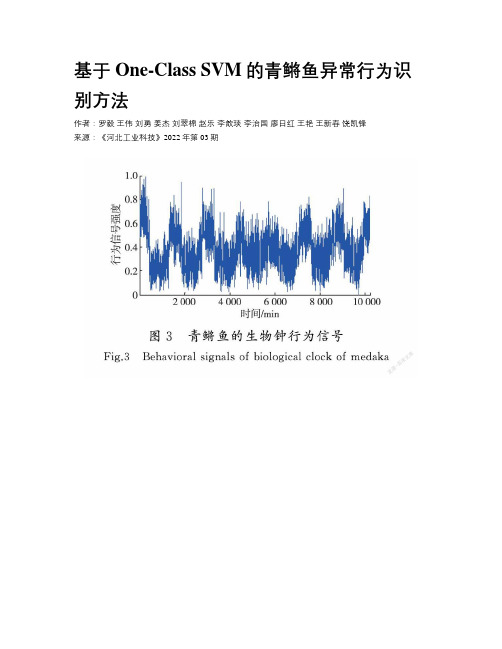
基于One-Class SVM的青鳉鱼异常行为识别方法作者:罗毅王伟刘勇姜杰刘翠棉赵乐李歆琰李治国廖日红王艳王新春饶凯锋来源:《河北工业科技》2022年第03期摘要:為了更准确地解析青鳉鱼在突发污染环境中的行为变化趋势,提出了一种基于One-Class SVM模型的青鳉鱼异常行为识别方法。
以青鳉鱼的生理及行为特征作为观测指标,将采集到的暴露在不同类型和浓度特征污染物下的青鳉鱼行为强度信号作为经验数据,利用直方图统计和主成分分析(PCA)对行为强度数据进行降维,实现行为特征提取,基于One-Class SVM构建模型,并以五水合硫酸铜和三氯酚作为特征污染物进行暴露实验对算法进行验证。
结果表明,One-Class SVM模型可以准确地识别正常行为和污染物暴露时发生的异常行为;对于有机污染物最快可在10 min内完成预警,重金属污染物可在1 h内完成预警,并且污染物浓度越高,模型的识别效果越好。
识别方法可对水源突发性水质污染进行更有效的监测和预警,也可为水污染应急决策提供技术支撑。
关键词:环境质量监测与评价;模式识别;青鳉鱼;异常行为;One-Class SVM中图分类号:X832 文献标识码:ADOI: 10.7535/hbgykj.2022yx03008Abnormal behavior recognition method of medaka based on One-Class SVMLUO Yi1,WANG Wei2,LIU Yong2,JIANG Jie2,LIU Cuimian1,ZHAO Le3,LI Xinyan3,LI Zhiguo3,LIAO Rihong4,WANG Yan4,WANG Xinchun4,RAO Kaifeng5,6,7(1.Shijiazhuang Environmental Monitoring Center,Shijiazhuang,Hebei 050022 ,China;2.CASA Environmental Technology (Wuxi) Company Limited,Wuxi,Jiangsu 214024,China;3.Hebei Province Ecology Environmental Monitoring Center,Shijiazhuang,Hebei 050037,China;4.Beijing South-to-North Water Diversion Loop Management Division,Beijing 100176,China;5.Research Center for Eco-Environmental Sciences,Chinese Academy of Sciences,Beijing 100085,China;6.State Key Joint Laboratory of Environment Simulation and Pollution Control,Beijing 100085,China;7.Key Laboratory of Drinking Water Science and Technology,Research Center for Eco-Environmental Sciences,Chinese Academy of Sciences,Beijing 100085,China)Abstract:In order to analyze the behavior change trend of medaka in sudden polluted environment more accurately,an abnormal behavior recognition method of medaka based on One-Class SVM model was proposed.Taking the physiological and behavioral characteristics of medaka as observation indexes,the behavioral intensity signals of medaka exposed to different types and concentrations of characteristic pollutants were taken as empirical data.The dimension of behavioral intensity data was reduced by histogram statistics and principal component analysis (PCA),so as to realize the extraction of behavioral features.The model was constructed based on One-Class SVM,and the algorithm was verified by exposure experiments with copper sulfate pentahydrate and trichlorophenol as characteristic pollutants.The experimental results show that the One-Class SVM model can accurately identify normal behavior and abnormal behavior during pollutant exposure.For organic pollutants,the early warning can be completed within 10 minutes at the fastest speed,and for heavy metal pollutants,the early warning can be completed within 1 hour.In addition,the higher the pollutant concentration is,the better the recognition effect of the model is.The identification method can carry out more effective monitoring and all-round early warning of sudden water source pollution,and provide technical support for water pollution emergency decision-making.Keywords:environmental quality monitoring and evaluation;pattern recognition;medaka;abnormal behavior;One-Class SVM在水源水质监测领域,有2种应用较为广泛的技术手段,一种是理化指标监测方法[1-2],通过定量或定性的分析方法,有针对性地测定水中有害物质及其浓度。
svm.oneclasssvm参数 -回复
svm.oneclasssvm参数-回复SVM (Support Vector Machines) 是一种非常流行的机器学习算法,广泛应用于二分类问题。
SVM.oneclasssvm 参数则是SVM 算法中的一个用于单类分类的参数。
在本文中,我们将逐步解释SVM 算法和oneclasssvm 参数的含义和作用。
让我们开始吧!首先,让我们简要了解SVM 算法。
SVM 是一种监督学习算法,用于二分类问题。
其基本思想是寻找一个最优的分割超平面,将两个不同类别的数据点分开。
这个分割超平面由一组支持向量(support vectors)确定,支持向量是距离分割超平面最近的训练样本点。
SVM 算法的目标是最大化支持向量到分割超平面的间距,使得分类器具有更好的泛化性能。
这个间距被称为“边界”(margin)。
在SVM 中,常用的间距计算和优化函数是线性的。
然而,当数据不是线性可分时,我们可以使用核技巧(kernel trick)将数据从输入空间映射到更高维的特征空间,使得数据在这个特征空间中线性可分。
现在,我们引入SVM.oneclasssvm 参数。
这个参数用于单类分类问题,即我们只有一类数据需要进行分类。
在这种情况下,我们需要找到一个分割超平面,将这类数据和其他数据分开。
oneclasssvm 参数控制着分割超平面的位置和形状。
oneclasssvm 参数有几个重要的属性。
首先,我们需要指定一个核函数,该函数用于在特征空间中计算数据点之间的相似性。
常见的核函数包括线性核、多项式核和高斯核。
不同的核函数可以捕捉到不同的数据结构。
其次,我们需要设置一个参数nu,它控制着支持向量机的复杂度。
较小的nu 值会导致更复杂的模型,而较大的nu 值会导致更简单的模型。
nu 值的选择需要根据具体问题进行调整,以平衡模型的复杂性和预测性能。
另外,还有一个重要的参数gamma,它会影响到高斯核函数计算数据相似性的方式。
较小的gamma 值会导致更广泛的高斯函数,即数据点之间的相似性更大程度上由它们之间的距离决定。
一种以One-Class SVM作为监督机制的过采样方法

专利名称:一种以One-Class SVM作为监督机制的过采样方法
专利类型:发明专利
发明人:董明刚,廖晨
申请号:CN202110503287.X
申请日:20210510
公开号:CN113971429A
公开日:
20220125
专利内容由知识产权出版社提供
摘要:本发明公开了一种以One‑ClassSVM作为监督机制的过采样方法,首先用数据集及其标签来训练条件生成对抗网络(ConditionalGenerativeadversarialnetwork,CGAN),然后用
One‑ClassSVM针对每一个小类训练一个单类训练模型,然后用CGAN的生成器以小类的标签作为输入合成新的样本点,在合成新样本点的过程中,通过其K近邻计算该样本是否为边界样本,若是则再用对应该类的SVM模型来判断该样本是否符合少数类的分布,最终找到高质量的合成样本点。
本发明能提高合成样本点的质量,避免样本分布重叠、失真等问题,适用于在二类或多类不平衡数据集下提高过采样技术合成的样本点的拟合性和泛化性。
申请人:桂林理工大学
地址:541004 广西壮族自治区桂林市建干路12号
国籍:CN
更多信息请下载全文后查看。
sklearn oneclass svm 损失函数 -回复

sklearn oneclass svm 损失函数-回复Sklearn OneClassSVM: Understanding the Loss FunctionIntroduction:In machine learning, one of the primary goals is to accurately classify data into different categories. However, there are instances where identifying outliers or anomalies is equally important.One-class SVM is a popular method used for anomaly detection, specifically when the data available for training contains only the normal class. In this article, we will focus on the loss function used in the OneClassSVM implementation provided by the sklearn library.1. One-Class SVM:One-Class SVM is a type of Support Vector Machine (SVM) algorithm used for unsupervised learning. Unlike traditional SVM models that aim to separate multiple classes, one-class SVM is designed to identify a boundary that encompasses the normal class while minimizing the influence of outliers. This makes it particularly useful in anomaly detection tasks, such as fraud detection, network intrusion detection, or medical diagnosis.2. The Loss Function:The loss function plays a crucial role in any machine learning algorithm, as it measures the model's accuracy and guides the optimization process. In the case of the OneClassSVM, the loss function is tailored to capture the characteristics of anomaly detection problems effectively.2.1. Hinge Loss:The primary component of the One-Class SVM loss function is the hinge loss. The hinge loss can be understood as a penalty imposed on misclassified samples in traditional SVMs. It measures the distance between the sample and the decision boundary, as well as the margin set by the user. Samples with a distance larger than the margin will not contribute to the loss, while samples within the margin or incorrectly classified will have non-zero loss.2.2. Nuclear Norm Regularization:OneClassSVM also utilizes a regularization term called "nuclear norm" to improve the model's generalization and prevent overfitting. The nuclear norm regularization adds a penalty term on the singular values of the kernel matrix, encouraging the model to find a more robust and generalized solution. This term helps themodel adapt to variations and noise in the data by reducing sensitivity to individual data points.3. Model Training:The OneClassSVM implementation in sklearn provides several parameters that allow users to control the loss function and regularization. These parameters include:- `nu`: Represents the upper boundary proportion of outliers accepted. The model aims to obtain a fraction `nu` of training samples that are classified as outliers.- `gamma`: Controls the influence of individual training samples. Higher values of gamma result in higher sensitivity to individual samples, potentially leading to overfitting.- `kernel`: Specifies the kernel function to be used to map the input data into a higher-dimensional space.4. Outlier Detection:Once the OneClassSVM model is trained, it can be used for outlier detection on unseen data. The model calculates the anomaly score for each sample, which represents the distance from the decision boundary. A higher score indicates a higher likelihood of being an outlier. By setting a threshold on the anomaly scores, we canidentify abnormal data points.5. Model Evaluation:Evaluating the effectiveness of an anomaly detection model is challenging due to the lack of labeled anomalous data. Common evaluation metrics for one-class SVM models include precision, recall, and the F1-score. Precision measures the proportion of correctly classified anomalies out of all identified anomalies. Recall measures the proportion of correctly identified anomalies out of all actual anomalies. The F1-score is the harmonic mean of precision and recall, providing an overall measure of the model's performance.Conclusion:The OneClassSVM implementation in sklearn utilizes a loss function composed of hinge loss and nuclear norm regularization. By minimizing the hinge loss, the model aims to identify the boundary that encompasses the normal class while minimizing the influence of outliers. The regularization term helps the model adapt to variations and reduces overfitting. Understanding the loss function and its components is essential for effectively utilizing theOneClassSVM model from the sklearn library in anomaly detection tasks.。
基于支持向量机算法的矮星系分类研究
基于支持向量机算法的矮星系分类研究作者:杨舟凡杨尧文蒋双如来源:《现代信息科技》2020年第15期摘要:矮星系是一类特殊的星系,其对于研究早期宇宙以及恒星系的形成和演化过程十分重要。
但是目前人类所能观察到的矮星系有限,如何从巡天项目获取的海量图像中识别出矮星系是研究的热点问题。
文章意在通过人工智能的方法将矮星系与非矮星系图像进行分类,解决矮星系识别问题,提出卷积神经网络和一类支持向量机两种方法。
经过实验,一类支持向量机分类的准确率更高。
关键词:天文图像;卷积神经网络;一类支持向量机中图分类号:TP301.6 文献标识码:A 文章编号:2096-4706(2020)15-0101-03Abstract:Dwarf galaxies are one special kind of galaxies,which are very important for the study of the formation and evolution of the early universe and star systems. However,the number of dwarf galaxies that can be observed is limited. How to identify dwarf galaxies from the massive images obtained by the sky survey project is a hot issue. The purpose of this paper is to classify dwarf galaxy and non dwarf galaxy image by artificial intelligence method,and solve the problem of dwarf galaxy recognition. Two methods of convolution neural network and One-class SVM are proposed. After the experiment,One-class SVM classification accuracy is higher.Keywords:astronomical image;convolution neural network;One-class SVM0 引言星系是由恒星系與星际尘埃组成的运行系统,矮星系是星系的一种,它是光度最弱的一类星系。
发那科机器人焊接应用IO配置(总线型)
发那科机器人焊接应用的I/O配置(总线型)<H2><A NAME="1">Version Information</A></H2> <PRE><A HREF="#TOP">【TOP】</A><br>F Number: YH14979VERSION : SpotTool+$VERSION: V7.5093 06/14/2010DATE: 14-AUG-11 18:21VERSION INFORMATION::SOFTWARE: ID:SpotTool+ 7DA5/12S/W Serial No. : 88150Controller ID : YH14979Default Personality (from FD)R-2000iB/210F V7.50P/12Servo Code : V15.01Cart. Mot. Parameter: V3.00JNT. Mot. Parameter : V3.00DCS : NoneSoftware Edition No.: V7.50P/12Update Version : NoneCustomization Ver. : NoneRoot Version : V7.5093Boot MONITOR : V7.70P/06Teach Pendant : 7D0F/01MBrowser Plugins : V7.7004TP Core Firmware : V7.7004Media from FRL 06/24/2010CONFIG::FEATURE: ORD NO:SpotTool+ H590English Dictionary H521Multi Language (CHIN) H539AA Vision Mastering AAVMAnalog I/O H550Auto Software Update ATUPAutomatic Backup J545Background Editing J616Camera I/F VCAMCell I/O CLIOCommon shell R645Common shell core CMSC Common so CMSP Common style select STYL Condition Monitor J628 Constant Path R663 Control Reliable CNRE Corner Region R654 Diagnostic log RSCH Disable Faults CDSB Dispense Plug-in SPLG Dual Check Safety UIF DCSU Enhanced Mirror Image R698 Enhanced Rob Serv Req ORSR Enhanced T1 Mode R680 Enhanced User Frame J604 Ext. DIO Config EIOC Extended Error Log R542 External DI BWD ESET FCTN Menu Save J516J716Group Mask Exchange MASK High-Speed Skip J627 Host Communications HOCO Hour Meter J513 I/O Interconnect 2 J542Incr Instruction J510 KAREL Cmd. Language J650 KAREL Run-Time Env J539 Kernel + Basic S/W H510 License Checker LCHK LogBook(System) OPLG MACROs, Skip/Offset J503 MH gripper common MHGC Mat.Handling Option MPLG MechStop Protection MCSP Mirror Shift J506 Mixed logic J554 Mode Switch MDSW Motion logger R637 Multi Appl Enabler MAEN Multi Equipment J617 Multi-Tasking J600 Position Registers J514 Print Function J507Prog Num Selection J515 Program Adjust J517 Program Shift J505 Program Status PRST Program ToolBox R598 RDM Robot Discovery FRDM Robot Service Request SRSR Robot Servo Code H930 SNPX basic SNBA Seal Common SLCM Shift Library SHLB Shift and Mirror Lib SMLB Soft Parts in VCCM SPVC Spot Plug-in SPPG TCP Auto Set J520 TCP Speed Prediction J524 TCP/IP Interface HTCP TMILIB Interface TMIL TP Menu Accounting TPAC TPTX TPTX Telnet Interface TELN Tool Offset J509 Unexcepted motn Check UECK User Frame UFRM Vision Core VCOR Vision Library VIPL Vision SP CSXC CSXC Vision Shift Tool CVVF Web Server HTTP Web Svr Enhancements R626 iPendant CGTP iPendant Grid Display IGUI iPendant Setup IPGSR-2000iB/210F H601 Servo Gun Axes H869 Auto Tuning CS J952 Collision Guard R534 Collision Guard Pack J684 Cycle Time Priority J523 DeviceNet Interface J753 DeviceNet(Slave) J754 Disp 2nd analog port R528 Extended Axis Control J518 Extended User Frames R696FANUC ServoGun Change J665 FRL Params R651 HMI Device (SNPX) R553 Multi-Group Motion J601 PC Interface R641 PMC(FAPT Ladder) J760 Password Protection J541 ROS Ethernet Packets R603 Servo Gun Option J643 Servo Gun WT Compens J933 Space Check J609 USB port on iPendant J957 YELLOW BOX J775 iRCalibration VShift J994Arc Advisor R666 Aux Servo Code SVMO Common calib UIF CUIF Cycle time Opt. CTOP Extended Axis Speed EXTS Func stup FCSP HTTP Proxy Svr PRXY High Speed ServoGun J886 IntelligentTP PC I/F J770JPN ARCPSU PRM J885 Motherboard driver MOBO PC Send Macros SEND Pressure Control PCTL Requires CP CPRQ Robot Library Setup RLCM SSPC error text ETSS Servo Gun Core J670 Servo Hand Change SVHC Sgdiag core SGDG Socket Messaging R636 Soft Limit SLMT TCPP Extention TCPE VCalibration Common VCCM VisShift I/F Common CVVC Vision Shift Common CVVS istdpnl IPNL iPendant HMI Setup U001 RM HELP INCL VIS PKGS U004 SMB TP Backup U006 RIPE GET_VAR FIX U007FLEXTOOL: ADD R729.FD U008 CVIS ADD EP ADV PKG U009 CVIS NO WTWTEST LOAD U010 LOAD HELP FOR SELECT U011 FALSE ALARM CPMO-130 U012 MD: HANG FROM INTP U013 R709 DRAM AVAILCHECKS U014 CVIS VPCS SUPP LIMCHK U015 CVIS VPFF POS DIF FIX U0168-12 CHARACTER PROGRA U017 SAVE FRAMEVAR.SV U018 TP Enable NOAM U026 STRCTURE SHADOW UPDAT U027 RIPE STATICS TOO MUCH U028 TIMQ MOTN-003 U030 ROBOGUIDE DAUGHTER U032 Disable touch in Edit U033 PATH NODE MOVETO U035 RIPEREMOVE TIME RETRY U038 VMXPACK MAY ASSERT U039 CYCLE DATA MAY BE COR U040 TOO MANY ARC OPTIONS U043 PMC Display wait fix U044 APSH-171 fix U045 SLOW T1 MOTN U046 GET_POS_TPE fix U047 jog disable by app wa U048 CVIS VPEP HIST RT FIX U049 MXSPD TB CPMO003 U050 CVIS BARCODE ENHANCE U051 prv save may not work U052 High RIPE traffic fix U053print from sysvar scr U054 PROGRAM ADJUST FOR SH U058 RIPE/GETSET ERROR HAN U060 IPENDANT SCREEN UNREA U061 HANDLE PART CORRECTIO U064 NO ED U066CVIS EP PKG INCL SVIP U067SIX DIGIT VERSIONS U068 CVIS NEW VERSION P06 U069 IMAGE SAVE LOAD U070 DISP PROC ISSUE U071 REPLAN JOINT DELTA U078TP EDIT CALLFROM FIX U079 CVIS FIX IPNDT RT IMG U080 $coord_mask default U084R719 ENHANCEMNT/FIXES U085 Local Hold TIMQ Adjus U097 PG: CHDELMON can caus U100 CVIS: 3D multi-view d U101 Increase Number of FD U103 KAREL CANNOT ACCESS M U104 Robot Settings are lo U108 PAINT - Wait/Release U109 FlexTool: Backward mo U114 PAINT - PaintPRO Repa U117 EDIT SCREEN IS CLOSED U500 ANTIDEFECT UIF FIX U507 PNIO V750 FIX1 U509 FIX LOADING DB SYSVAR U510 FIX EDGE DETECTION U511 ONLINE HELP BUGFIX U512 CVIS: CAM CALIB FIX U514 DISP CUSTOM FOR SSGUN U515 FIX ABC JARKY MOTION U517 MILLIMETER CONVERSION U518 GARBLED STR REG U519 ALARM TEXT BUG FIX U520 DISP CUST DRY FOR SSG U521 IMPROVE LWR DETECTION U523 CVIS FREEZE VLOG TASK U525VP2S MM CONVERSION U526 FIX TP FREEZE IBPX U527FX DB/TB BUSY RUNNING U528 RECORD CALIBRATION LO U529 DIV CALCULATION FIX U530 FIX FOR BWD RETURN U531 CONDITION MONITOR FIX U532 VOFS: UNEXP ALARM FIX U533 FIX SERVO GUN TEXT U534 FIX FENCE SVEMG ABNML U535 DCS CC_SAFEIO ALARM U537 IMPROVED GUN TOUCHUP U540 FIX GUN CHG WITH DNET U541 UPDATE GUNTCH PAEAMS U542 DOT PETTERN BUG U543 CVIS: IRVISION BUG FI U544UPDATE SVGN ERROR TXT U545FIX TOOLCHG WITH DNET U546MLOCK CHK WITH GUNCHG U547MECH COMP FOR GUNTCH U549IMPROVE GUNTCH PARAMS U550VISION MEMORY LEAK U551FIX UNWANTED MESSAGE U552SUPPORT DET SOFT WORK U553CVIS:SPEC CHANGE OF V U554GRID DETECT BUG FIX U559MOTOR::GR: AX: MOTOR ID AND INFO:1 1 ACaiSR30/3000 80A H1 DSP1-L1 2 ACaiSR30/3000 80A H2 DSP1-M1 3 ACaiSR30/3000 80A H3 DSP1-J1 4 ACa12/4000iS 40A H4 DSP1-K1 5 ACa12/4000iS 40A H5 DSP2-L1 6 ACa12/4000iS 40A H6 DSP2-M1 7 aiF22/3000 80A H DSP -2 1 aiS8/4000 80A H DSP -SERVO::GROUP: AXIS: SERVO PARAM ID:1 1 P02.061 2 P02.061 3 P02.061 4 P02.061 5 P02.061 6 P02.061 7 P00.392 1 P00.39</PRE><H2><A NAME="2">Memory Detail</A></H2> <PRE><A HREF="#TOP">【TOP】</A><P>MEMORY USAGE::MEMORY DETAIL (MAIN):Pools TOTAL AVAILABLE LARGEST TPP 800.0KB 577.8KB 555.0KB PERM 1978.0KB 371.6KB 366.5KB SYSTEM 7182.0KB 2.5KB 2.5KBSHADOW 5894.5KB 5556.5KB 32.0KBTEMP 21052.5KB 1422.8KB 714.2KBFROM 31857.0KB 9258.0KB .0KBHARDWAREFROM 32MBDRAM 32MBSRAM 2MBMEMORY DETAIL (COMM):Pools TOTAL AVAILABLE LARGESTTPP 0.0KB 0.0KB 0.0KBPERM 48.0KB 47.8KB 47.8KBSYSTEM 6144.0KB 5553.0KB 5553.0KBSHADOW 5894.5KB 5556.5KB 32.0KBTEMP 9844.5KB 8201.3KB 7949.9KB</PRE><H2><A NAME="3">Program Status Information</A></H2><PRE><A HREF="#TOP">【TOP】</A><P>TASK STATES:1 RESET status = ABORTED****** History Data ******Routine depth: 0 Routine: RESETLine: 1 Program: RESET Type: TP 2 STHICHNG status = ABORTED****** History Data ******Routine depth: 0 Routine: STHICHNGLine: 128 Program: STHICHNG Type: PC 3 PNLINST status = ABORTED****** History Data ******Routine depth: 0 Routine: PNLINSTLine: 223 Program: PNLINST Type: PC 4 PSCOLD status = ABORTED****** History Data ******Routine depth: 0 Routine: PSCOLDLine: 93 Program: PSCOLD Type: PC5 SYRSRUTL status = ABORTED****** History Data ******Routine depth: 0 Routine: SYRSRUTLLine: 63 Program: SYRSRUTL Type: PC 6 SVGNCH status = ABORTED****** History Data ******Routine depth: 0 Routine: SVGNCHLine: 287 Program: SVGNCH Type: PC 7 SGDIAINI status = ABORTED****** History Data ******Routine depth: 0 Routine: SGDIAINILine: 204 Program: SGDIAINI Type: PC8 ATSHELL RUNNING @ 1055 in ATSHELL of ATSHELL****** History Data ******Routine depth: 0 Routine: ATSHELLLine: 1055 Program: ATSHELL Type: PC 9 LOADCELL status = ABORTED****** History Data ******Routine depth: 0 Routine: PBCORELine: 0 Program: PBCORE Type: 0 10 MHGRSHLL RUNNING @ 1213 in MHGRSHLL of MHGRSHLL****** History Data ******Routine depth: 0 Routine: MHGRSHLLLine: 1213 Program: MHGRSHLL Type: PC 11 SWAXTSK1 RUNNING @ 758 in PROCESSAMR of SWAXTCMN****** History Data ******Routine depth: 1 Routine: PROCESSAMRLine: 758 Program: SWAXTCMN Type: PC Routine depth: 0 Routine: SWAXTSK1Line: 172 Program: SWAXTSK1 Type: PC12 SWAXTSK2 RUNNING @ 758 in PROCESSAMR of SWAXTCMN****** History Data ******Routine depth: 1 Routine: PROCESSAMRLine: 758 Program: SWAXTCMN Type: PCRoutine depth: 0 Routine: SWAXTSK2Line: 120 Program: SWAXTSK2 Type: PC 13 SLCUSTOM RUNNING @ 1647 in SLCUSTOM of SLCUSTOM****** History Data ******Routine depth: 0 Routine: SLCUSTOMLine: 1647 Program: SLCUSTOM Type: PC 14 SWIMSET status = ABORTED****** History Data ******Routine depth: 0 Routine: SWIMSETLine: 348 Program: SWIMSET Type: PC</PRE><H2><A NAME="4">I/O status information</A></H2><PRE><A HREF="#TOP"></A><P>IO STATUS::DIN【1】OFFDIN【2】OFFDIN【3】OFFDIN【4】OFFDIN【5】OFF UPPER TIP RESETDIN【6】OFF LOWER TIP RESETDIN【7】OFF TEST RUNDIN【8】OFF TIP CHANGE COMPLETEDIN【9】OFFDIN【10】OFFDIN【11】OFF DRESS_1 COMPLETEDIN【12】OFF DRESS_2 COMPLETEDIN【13】OFF DRESS_1 ADV.LSDIN【14】OFF DRESS_2 ADV.LSDIN【15】OFF DRESS_1 RET.LSDIN【16】OFF DRESS_2 RET.LSDIN【17】OFFDIN【18】OFFDIN【19】OFF TC1 5STEP 1DIN【20】OFF TC1 5STEP 2DIN【21】OFF TC1 5STEP 3DIN【22】OFF TC1 5STEP 4DIN【23】OFF TC2 5STEP 1DIN【24】OFF TC2 5STEP 2DIN【25】OFF TC2 5STEP 3DIN【26】OFF TC2 5STEP 4DIN【27】OFF POP WELD COMPLETE DIN【28】OFFDIN【29】OFFDIN【30】OFFDIN【31】OFF GUN COVER OPENDIN【32】ON GUN COVER CLOSE LS DIN【33】OFF HAND COVER OPEN DIN【34】ON HAND COVER CLOSE DIN【35】OFF AHC COVER-3 OPEN LS DIN【36】OFF AHC COVER-3 CLOSE LS DIN【37】OFF AHC COVER-4 OPEN LS DIN【38】OFF AHC COVER-4 CLOSE LS DIN【39】OFF GUN1 2ND ST OPEN LS DIN【40】OFF GUN2 2ND ST OPEN LS DIN【41】OFF CHUCK OPEN CONFIRM DIN【42】ON CHUCK CLOSE CONFIRM DIN【43】ON AHC FACEDIN【44】OFFDIN【45】OFFDIN【46】OFFDIN【47】OFF ROBOT 2ND STARTDIN【48】OFFDIN【49】OFF WELD COMPLETEDIN【50】OFFDIN【51】OFFDIN【52】OFFDIN【53】OFFDIN【54】OFFDIN【55】ON STYLE1DIN【56】OFF STYLE2DIN【57】OFF STYLE4DIN【58】OFF STYLE8DIN【59】OFF STYLE16DIN【60】OFF STYLE32DIN【61】OFF STYLE64DIN【62】OFF STYLE128DIN【63】OFF GUN1 STEADDIN【64】OFF HAND STEADDIN【65】OFF TOOL STEAD 3DIN【66】OFF TOOL STEAD 4DIN【67】OFFDIN【68】OFFDIN【69】OFFDIN【70】OFFDIN【71】OFF Jig Non-int.DIN【72】OFF Shuttle Nnn-int.DIN【73】OFFDIN【74】OFF Weld Enable 1DIN【75】OFF Weld Enable 2DIN【76】ON Robot_G Weld Comp.1 DIN【77】OFFDIN【78】OFFDIN【79】ON Pick Up Ok Feeder DIN【80】OFFDIN【81】OFF Hand Jig Conf.DIN【82】OFF Hand Rock Adv Comp DIN【83】OFF Jig Cover Close Comp. DIN【84】OFF Hand Rock Ret Comp. DIN【85】OFF Jig Cover Open Comp. DIN【86】ON Robct_G I/L1DIN【87】ON Robot_G I/L2DIN【88】OFFDIN【89】OFFDIN【90】OFFDIN【91】OFFDIN【92】OFFDIN【93】OFFDIN【94】OFF Sealer HoldDIN【95】OFFDIN【96】OFFDIN【97】OFFDIN【98】OFFDIN【99】OFFDIN【100】OFFDIN【101】OFFDIN【102】OFFDIN【103】OFFDIN【104】OFFDIN【105】OFFDIN【106】OFF PART IN STATION CONFIRM DIN【107】ON ROBOT AWAY FROM STATION DIN【108】OFFDIN【109】ON GUN IN STATIONDIN【110】OFF HANDKING IN STATIONDIN【113】ON SEALING MATERIAL OKDIN【114】OFF SEALING MATERIAL LACKING DIN【115】OFFDIN【116】OFF HEATING NOT OKDIN【117】OFFDIN【118】OFFDIN【119】OFFDIN【120】OFFDIN【121】OFFDIN【122】OFFDIN【123】OFFDIN【124】OFFDIN【125】OFFDIN【126】OFFDIN【127】OFFDIN【128】OFFDIN【129】OFF Clamp 1 openDIN【130】ON Clamp 1 closedDIN【131】OFF Clamp 2 openDIN【132】ON Clamp 2 closedDIN【133】OFF Clamp 3 openDIN【134】ON Clamp 3 closedDIN【135】OFF Clamp 4 openDIN【136】ON Clamp 4 closedDIN【137】OFF Clamp 5 openDIN【138】ON Clamp 5 closedDIN【139】OFF Clamp 6 openDIN【140】ON Clamp 6 closedDIN【141】OFF _DIN【142】OFF _DIN【143】OFF _DIN【144】OFF _DIN【145】OFF Part present 1DIN【146】OFF Part present 2DIN【147】OFFDIN【148】OFFDIN【149】OFF 2-1-ONDIN【150】ON 2-1-OFFDIN【151】OFF 2-2-ONDIN【152】ON 2-2-OFFDIN【153】ON 2-3-OFFDIN【154】ON 2-4-OFFDIN【155】OFFDIN【156】OFFDIN【157】ON 3-1-OFFDIN【158】OFF 3-1-ONDIN【159】ON 3-2-OFFDIN【160】OFF 3-2-ONDOUT【1】OFF ROBOT USER ALARM DOUT【2】OFF STYLE VAERITY FAULT DOUT【3】OFFDOUT【4】OFFDOUT【5】OFF GUN COVER OPENDOUT【6】OFF GUN COVER CLOSEDOUT【7】OFF HAND COVER OPEN DOUT【8】OFF HAND COVER CLOSE DOUT【9】OFF AHC COVER-3 OPEN DOUT【10】OFF AHC COVER-3 CLOSE DOUT【11】OFF AHC COVER-4 OPEN DOUT【12】OFF AHC COVER-4 CLOSE DOUT【13】OFFDOUT【14】OFF TIP WEAR OVER MOVE DOUT【15】OFF TIP WEAR OVER FIXDOUT【16】OFF TIP CHANGE POSITION DOUT【17】OFF TC1 GUN FAULT CHECK DOUT【18】OFF TC1 OFF_SET MEASURING DOUT【19】OFFDOUT【20】OFFDOUT【21】OFFDOUT【22】OFFDOUT【23】OFFDOUT【24】OFFDOUT【25】OFFDOUT【26】OFFDOUT【27】OFFDOUT【28】OFFDOUT【29】OFF DRESSOR-1 STARTDOUT【30】OFF DRESSOR-2 STARTDOUT【31】OFF DRESSOR SHIFT1 ADV.SERVO DOUT【32】OFF DRESSOR SHIFT2 ADV.SERVO DOUT【33】OFF POP START1DOUT【34】OFF POP START2DOUT【35】OFF POP START3DOUT【36】OFF POP START4DOUT【37】OFF POP WELD CONDITION 1 DOUT【38】OFF POP WELD CONDITION 2 DOUT【39】OFF POP WELD CONDITION 4 DOUT【40】OFF POP WELD CONDITION 8 DOUT【41】OFF POP WELD CONDITION 16 DOUT【42】OFF POP WELD CONDITION 32 DOUT【43】OFF POP SWING ADV.DOUT【44】OFFDOUT【45】OFF WORK COMPLETE DOUT【46】ON Shuttle Run Enable DOUT【47】OFF 2nd Work Comp.DOUT【48】OFF GUN1 PRESSDOUT【49】OFFDOUT【50】OFFDOUT【51】OFF UNCHUCK POSITION DOUT【52】OFF AHC FaceDOUT【53】OFF CHUCK OPENDOUT【54】ON CHUCK CLOSEDOUT【55】OFF Sealer FaultDOUT【56】OFF Sealer EM.StopDOUT【57】OFF Sealer LowDOUT【58】OFF SEAL AIR PRESSDOUT【59】OFFDOUT【60】OFFDOUT【61】OFF WELD CONDITION 1 DOUT【62】OFF WELD CONDITION 2 DOUT【63】OFF WELD CONDITION 4 DOUT【64】OFF WELD CONDITION 8 DOUT【65】OFF WELD CONDITION16 DOUT【66】OFF WELD CONDITION32 DOUT【67】OFF WELD CONDITION64 DOUT【68】OFF WELD CONDITION128 DOUT【69】ON Jig Non-int.DOUT【70】ON Shuttle Non-int.DOUT【71】OFF Tip Change Run.DOUT【72】OFF Tip Dress Run.DOUT【73】OFFDOUT【74】OFFDOUT【75】OFFDOUT【76】OFFDOUT【77】ON Fdr. Non-int.DOUT【78】OFF Fdr. unload comp.DOUT【79】OFFDOUT【80】OFF Jig Hand ClampDOUT【81】OFF Jig Cover CloseDOUT【82】OFF Jig Hand UnclampDOUT【83】OFF Jig Cover OpenDOUT【84】ON Robot_G I/L1DOUT【85】ON Robot_G I/L2DOUT【86】OFFDOUT【87】OFFDOUT【88】OFFDOUT【89】OFFDOUT【90】OFF SEALING MATERIAL LACKING DOUT【91】OFF SEALING HEATING NOT OK DOUT【92】OFF SEALING GUN OPEN DOUT【93】OFFDOUT【94】OFF CC-LINK STATUSDOUT【95】OFF CC-LINK STATUSDOUT【96】OFF CC-LINK STATUSDOUT【97】OFF CC-LINK STATUSDOUT【98】OFF CC-LINK STATUSDOUT【99】OFF CC-LINK STATUSDOUT【100】OFF CC-LINK STATUSDOUT【101】OFF CC-LINK STATUSDOUT【102】OFFDOUT【103】OFFDOUT【104】OFF JIG CLAMP OPEN REQUEST DOUT【105】OFFDOUT【106】OFF PART IN STATIONDOUT【107】OFFDOUT【108】OFFDOUT【113】OFF SEALING STARTDOUT【114】ON SEALING STOPDOUT【115】OFFDOUT【116】OFFDOUT【117】OFFDOUT【118】OFFDOUT【119】OFFDOUT【120】OFFDOUT【121】OFFDOUT【122】OFFDOUT【123】OFFDOUT【124】OFFDOUT【125】OFFDOUT【127】OFFDOUT【128】OFFDOUT【129】OFF SPAREDOUT【130】OFF SPAREDOUT【131】OFF CLAMP_3_ON DOUT【132】ON CLAMP_3_OFF DOUT【133】OFF CLAMP_2_ON DOUT【134】ON CLAMP_2_OFF DOUT【135】OFF CLAMP_1_ON DOUT【136】ON CLAMP_1_OFF DOUT【137】OFF SPAREDOUT【138】OFF SPAREDOUT【139】OFF _DOUT【140】OFF _DOUT【141】OFF _DOUT【142】OFF _DOUT【143】OFF _DOUT【144】OFF _GIN【1】 1 Style No.GOUT【1】0UI【1】ON *IMSTPUI【2】ON *HoldUI【3】ON *SFSPDUI【4】OFF Cycle stopUI【5】OFF Fault resetUI【6】OFF StartUI【7】OFF HomeUI【8】ON EnableUI【9】OFF RSR1/PNS1UI【10】OFF RSR2/PNS2UI【11】OFF RSR3/PNS3UI【12】OFF RSR4/PNS4UI【13】OFF RSR5/PNS5UI【14】OFF RSR6/PNS6UI【15】OFF RSR7/PNS7UI【16】OFF RSR8/PNS8UI【17】OFF PNS strobeUI【18】OFF Prod startUO【1】ON Cmd enabled UO【2】ON System ready UO【3】OFF Prg runningUO【4】OFF Prg pausedUO【5】OFF Motion heldUO【7】ON At perchUO【8】OFF TP enabledUO【9】OFF Batt alarmUO【10】OFF BusyUO【11】OFF ACK1/SNO1UO【12】OFF ACK2/SNO2UO【13】OFF ACK3/SNO3UO【14】OFF ACK4/SNO4UO【15】OFF ACK5/SNO5UO【16】OFF ACK6/SNO6UO【17】OFF ACK7/SNO7UO【18】OFF ACK8/SNO8UO【19】OFF SNACKUO【20】OFF ReservedSI【1】OFF Fault resetSI【2】ON RemoteSI【3】ON HoldSI【4】OFF User PB#1SI【5】OFF User PB#2SI【6】OFF Cycle startSI【7】OFFSI【8】ON CE/CRselectb0 SI【9】ON CE/CRselectb1 SI【10】OFFSI【11】OFFSI【12】OFFSI【13】OFFSI【14】OFFSI【15】OFFSI【16】ONSO【1】OFF Cycle startSO【2】OFF HoldSO【3】OFF Fault LEDSO【4】OFF Batt alarmSO【5】OFF User LED#1SO【6】ON User LED#2SO【7】OFF TP enabledSO【8】OFFSO【9】OFFSO【10】OFFSO【11】OFFSO【12】OFFSO【13】OFFSO【15】OFFSO【16】ONUI【1】ON *IMSTPUI【2】ON *HoldUI【3】ON *SFSPDUI【4】OFF Cycle stopUI【5】OFF Fault resetUI【6】OFF StartUI【7】OFF HomeUI【8】ON EnableUI【9】OFF RSR1/PNS1UI【10】OFF RSR2/PNS2UI【11】OFF RSR3/PNS3UI【12】OFF RSR4/PNS4UI【13】OFF RSR5/PNS5UI【14】OFF RSR6/PNS6UI【15】OFF RSR7/PNS7UI【16】OFF RSR8/PNS8UI【17】OFF PNS strobeUI【18】OFF Prod startUO【1】ON Cmd enabled UO【2】ON System ready UO【3】OFF Prg running UO【4】OFF Prg paused UO【5】OFF Motion held UO【6】OFF FaultUO【7】ON At perchUO【8】OFF TP enabled UO【9】OFF Batt alarm UO【10】OFF BusyUO【11】OFF ACK1/SNO1 UO【12】OFF ACK2/SNO2 UO【13】OFF ACK3/SNO3 UO【14】OFF ACK4/SNO4 UO【15】OFF ACK5/SNO5 UO【16】OFF ACK6/SNO6 UO【17】OFF ACK7/SNO7 UO【18】OFF ACK8/SNO8 UO【19】OFF SNACKUO【20】OFF ReservedRI【1】OFFRI【2】OFFRI【3】OFFRI【5】OFFRI【6】OFFRI【7】OFFRI【8】OFFRO【1】OFFRO【2】OFFRO【3】OFFRO【4】OFFRO【5】OFFRO【6】OFFRO【7】OFFRO【8】OFF</PRE><H2><A NAME="5">I/O Configuration Information</A></H2> <PRE><A HREF="#TOP">【TOP】</A><P>IO CONFIGURATION::DIN【5】UPPER TIP RESETDIN【6】LOWER TIP RESETDIN【7】TEST RUNDIN【8】TIP CHANGE COMPLETEDIN 1 - 8 RACK: 81 SLOT: 15 PORT: 19DIN【11】DRESS_1 COMPLETEDIN【12】DRESS_2 COMPLETEDIN【13】DRESS_1 ADV.LSDIN【14】DRESS_2 ADV.LSDIN【15】DRESS_1 RET.LSDIN【16】DRESS_2 RET.LSDIN 9 - 16 RACK: 81 SLOT: 15 PORT: 27DIN【19】TC1 5STEP 1DIN【20】TC1 5STEP 2DIN【21】TC1 5STEP 3DIN【22】TC1 5STEP 4DIN【23】TC2 5STEP 1DIN【24】TC2 5STEP 2DIN 17 - 24 RACK: 81 SLOT: 15 PORT: 35DIN【25】TC2 5STEP 3DIN【26】TC2 5STEP 4DIN【27】POP WELD COMPLETEDIN【31】GUN COVER OPENDIN【32】GUN COVER CLOSE LSDIN 25 - 32 RACK: 81 SLOT: 15 PORT: 43DIN【33】HAND COVER OPENDIN【34】HAND COVER CLOSEDIN【35】AHC COVER-3 OPEN LSDIN【36】AHC COVER-3 CLOSE LSDIN【37】AHC COVER-4 OPEN LSDIN【38】AHC COVER-4 CLOSE LSDIN【39】GUN1 2ND ST OPEN LSDIN【40】GUN2 2ND ST OPEN LSDIN 33 - 40 RACK: 81 SLOT: 15 PORT: 51 DIN【41】CHUCK OPEN CONFIRMDIN【42】CHUCK CLOSE CONFIRMDIN【43】AHC FACEDIN【47】ROBOT 2ND STARTDIN 41 - 48 RACK: 81 SLOT: 15 PORT: 59 DIN【49】WELD COMPLETEDIN【55】STYLE1DIN【56】STYLE2DIN 49 - 56 RACK: 81 SLOT: 15 PORT: 67 DIN【57】STYLE4DIN【58】STYLE8DIN【59】STYLE16DIN【60】STYLE32DIN【61】STYLE64DIN【62】STYLE128DIN【63】GUN1 STEADDIN【64】HAND STEADDIN 57 - 64 RACK: 81 SLOT: 15 PORT: 75 DIN【65】TOOL STEAD 3DIN【66】TOOL STEAD 4DIN【71】Jig Non-int.DIN【72】Shuttle Nnn-int.DIN 65 - 72 RACK: 81 SLOT: 15 PORT: 83 DIN【74】Weld Enable 1DIN【75】Weld Enable 2DIN【76】Robot_G Weld Comp.1DIN【79】Pick Up Ok FeederDIN 73 - 80 RACK: 81 SLOT: 15 PORT: 91 DIN【81】Hand Jig Conf.DIN【82】Hand Rock Adv CompDIN【83】Jig Cover Close Comp.DIN【84】Hand Rock Ret Comp.DIN【85】Jig Cover Open Comp.DIN【86】Robct_G I/L1DIN【87】Robot_G I/L2DIN 81 - 88 RACK: 81 SLOT: 15 PORT: 99DIN【94】Sealer HoldDIN 89 - 96 RACK: 81 SLOT: 15 PORT: 107 DIN【101】DIN【104】DIN 97 - 104 RACK: 81 SLOT: 15 PORT: 115 DIN【106】PART IN STATION CONFIRMDIN【107】ROBOT AWAY FROM STATIONDIN【109】GUN IN STATIONDIN【110】HANDKING IN STATIONDIN 105 - 110 RACK: 81 SLOT: 15 PORT: 123 DIN【113】SEALING MATERIAL OKDIN【114】SEALING MATERIAL LACKINGDIN【116】HEATING NOT OKDIN 113 - 120 RACK: 82 SLOT: 6 PORT: 1 DIN 121 - 128 RACK: 82 SLOT: 6 PORT: 9 DIN【129】Clamp 1 openDIN【130】Clamp 1 closedDIN【131】Clamp 2 openDIN【132】Clamp 2 closedDIN【133】Clamp 3 openDIN【134】Clamp 3 closedDIN【135】Clamp 4 openDIN【136】Clamp 4 closedDIN 129 - 136 RACK: 82 SLOT: 4 PORT: 1 DIN【137】Clamp 5 openDIN【138】Clamp 5 closedDIN【139】Clamp 6 openDIN【140】Clamp 6 closedDIN【141】_DIN【142】_DIN【143】_DIN【144】_DIN 137 - 144 RACK: 82 SLOT: 4 PORT: 9 DIN【145】Part present 1DIN【146】Part present 2DIN【149】2-1-ONDIN【150】2-1-OFFDIN【151】2-2-ONDIN【152】2-2-OFFDIN 145 - 152 RACK: 82 SLOT: 5 PORT: 1 DIN【153】2-3-OFFDIN【154】2-4-OFFDIN【157】3-1-OFFDIN【158】3-1-ONDIN【159】3-2-OFFDIN【160】3-2-ONDIN 153 - 160 RACK: 82 SLOT: 5 PORT: 9 DOUT【1】ROBOT USER ALARMDOUT【2】STYLE VAERITY FAULTDOUT【5】GUN COVER OPENDOUT【6】GUN COVER CLOSEDOUT【7】HAND COVER OPENDOUT【8】HAND COVER CLOSEDOUT 1 - 8 RACK: 81 SLOT: 15 PORT: 21 DOUT【9】AHC COVER-3 OPENDOUT【10】AHC COVER-3 CLOSEDOUT【11】AHC COVER-4 OPENDOUT【12】AHC COVER-4 CLOSEDOUT【14】TIP WEAR OVER MOVEDOUT【15】TIP WEAR OVER FIXDOUT【16】TIP CHANGE POSITIONDOUT 9 - 16 RACK: 81 SLOT: 15 PORT: 29 DOUT【17】TC1 GUN FAULT CHECKDOUT【18】TC1 OFF_SET MEASURINGDOUT 17 - 24 RACK: 81 SLOT: 15 PORT: 37 DOUT【29】DRESSOR-1 STARTDOUT【30】DRESSOR-2 STARTDOUT【31】DRESSOR SHIFT1 ADV.SERVODOUT【32】DRESSOR SHIFT2 ADV.SERVODOUT 25 - 32 RACK: 81 SLOT: 15 PORT: 45 DOUT【33】POP START1DOUT【34】POP START2DOUT【35】POP START3DOUT【36】POP START4DOUT【37】POP WELD CONDITION 1DOUT【38】POP WELD CONDITION 2DOUT【39】POP WELD CONDITION 4DOUT【40】POP WELD CONDITION 8DOUT 33 - 40 RACK: 81 SLOT: 15 PORT: 53 DOUT【41】POP WELD CONDITION 16DOUT【42】POP WELD CONDITION 32DOUT【43】POP SWING ADV.DOUT【45】WORK COMPLETEDOUT【46】Shuttle Run EnableDOUT【47】2nd Work Comp.DOUT【48】GUN1 PRESSDOUT 41 - 48 RACK: 81 SLOT: 15 PORT: 61 DOUT【51】UNCHUCK POSITIONDOUT【52】AHC FaceDOUT【53】CHUCK OPENDOUT【54】CHUCK CLOSEDOUT【55】Sealer FaultDOUT【56】Sealer EM.StopDOUT 49 - 56 RACK: 81 SLOT: 15 PORT: 69 DOUT【57】Sealer LowDOUT【58】SEAL AIR PRESSDOUT【61】WELD CONDITION 1DOUT【62】WELD CONDITION 2DOUT【63】WELD CONDITION 4DOUT【64】WELD CONDITION 8DOUT 57 - 64 RACK: 81 SLOT: 15 PORT: 77 DOUT【65】WELD CONDITION16DOUT【66】WELD CONDITION32DOUT【67】WELD CONDITION64DOUT【68】WELD CONDITION128DOUT【69】Jig Non-int.DOUT【70】Shuttle Non-int.DOUT【71】Tip Change Run.DOUT【72】Tip Dress Run.DOUT 65 - 72 RACK: 81 SLOT: 15 PORT: 85 DOUT【77】Fdr. Non-int.DOUT【78】Fdr. unload comp.DOUT【80】Jig Hand ClampDOUT 73 - 80 RACK: 81 SLOT: 15 PORT: 93 DOUT【81】Jig Cover CloseDOUT【82】Jig Hand UnclampDOUT【83】Jig Cover OpenDOUT【84】Robot_G I/L1DOUT【85】Robot_G I/L2DOUT 81 - 88 RACK: 81 SLOT: 15 PORT: 101 DOUT【90】SEALING MATERIAL LACKINGDOUT【91】SEALING HEATING NOT OKDOUT【92】SEALING GUN OPENDOUT【94】CC-LINK STATUSDOUT【95】CC-LINK STATUSDOUT【96】CC-LINK STATUSDOUT 89 - 96 RACK: 81 SLOT: 15 PORT: 109 DOUT【97】CC-LINK STATUSDOUT【98】CC-LINK STATUSDOUT【99】CC-LINK STATUSDOUT【100】CC-LINK STATUSDOUT【101】CC-LINK STATUSDOUT【103】DOUT【104】JIG CLAMP OPEN REQUESTDOUT 97 - 104 RACK: 81 SLOT: 15 PORT: 117DOUT【106】PART IN STATIONDOUT 105 - 108 RACK: 81 SLOT: 15 PORT: 125DOUT【113】SEALING STARTDOUT【114】SEALING STOPDOUT 113 - 120 RACK: 82 SLOT: 6 PORT: 1 DOUT 121 - 128 RACK: 82 SLOT: 6 PORT: 9 DOUT【129】SPAREDOUT【130】SPAREDOUT【131】CLAMP_3_ONDOUT【132】CLAMP_3_OFFDOUT【133】CLAMP_2_ONDOUT【134】CLAMP_2_OFFDOUT【135】CLAMP_1_ONDOUT【136】CLAMP_1_OFFDOUT 129 - 136 RACK: 82 SLOT: 4 PORT: 1 DOUT【137】SPAREDOUT【138】SPAREDOUT【139】_DOUT【140】_DOUT【141】_DOUT【142】_DOUT【143】_DOUT【144】_DOUT 137 - 144 RACK: 82 SLOT: 4 PORT: 9GIN【1】Style No.GIN 1 RACK: 81 SLOT: 15 PORT: 73 #NUM: 8 GOUT 1 RACK: 81 SLOT: 15 PORT: 81 #NUM: 6 UI【1】*IMSTPUI【2】*HoldUI【3】*SFSPDUI【4】Cycle stopUI【5】Fault resetUI【6】StartUI【7】HomeUI【8】EnableUI 1 - 8 RACK: 81 SLOT: 15 PORT: 1UI【9】RSR1/PNS1UI【10】RSR2/PNS2UI【11】RSR3/PNS3UI【12】RSR4/PNS4UI【13】RSR5/PNS5UI【14】RSR6/PNS6UI【15】RSR7/PNS7UI【16】RSR8/PNS8UI 9 - 16 RACK: 81 SLOT: 15 PORT: 9UI【17】PNS strobeUI【18】Prod startUI 17 - 18 RACK: 81 SLOT: 15 PORT: 17 UO【1】Cmd enabledUO【2】System readyUO【3】Prg runningUO【4】Prg pausedUO【5】Motion heldUO【6】FaultUO【7】At perchUO【8】TP enabledUO 1 - 8 RACK: 81 SLOT: 15 PORT: 1 UO【9】Batt alarmUO【10】BusyUO【11】ACK1/SNO1UO【12】ACK2/SNO2UO【13】ACK3/SNO3UO【14】ACK4/SNO4UO【15】ACK5/SNO5UO【16】ACK6/SNO6UO 9 - 16 RACK: 81 SLOT: 15 PORT: 9 UO【17】ACK7/SNO7UO【18】ACK8/SNO8UO【19】SNACKUO【20】ReservedUO 17 - 20 RACK: 81 SLOT: 15 PORT: 17</PRE><H2><A NAME="6">Safety Status Information</A></H2> <PRE><A HREF="#TOP">【TOP】</A><P>SAFETY SIGNALS::External ESTOP FALSESOP Estop FALSETP ESTOP FALSEHand Broken TRUEOverTravel FALSELow Air Alarm FALSEFence Open FALSEBelt Broken FALSETP Enable FALSETP Deadman FALSESVOFF Detect FALSEServo Disconnect FALSENon Teacher Enb FALSE</PRE><H2><A NAME="7">Current Position Information</A></H2> <PRE><A HREF="#TOP">【TOP】</A><P>CURRENT ROBOT POSITION::Group #: 1CURRENT JOINT POSITION:Joint 1: 98.31Joint 2: -21.86Joint 3: -15.51Joint 4: 3.71Joint 5: -60.75Joint 6: 227.81EXTAXS: 1: 1036.33Frame #: 0 Tool #: 2CURRENT USER FRAME POSITION:X: -559.31Y: 1592.64Z: 151.27W: -.58P: -12.93R: 89.70CFG: N U T, 0, 0, 1EXTAXS: 1: 1036.33Tool #: 2CURRENT WORLD POSITION:X: -559.31Y: 1592.64Z: 151.27W: -.58P: -12.93R: 89.70CFG: N U T, 0, 0, 1EXTAXS: 1: 1036.33CURRENT ROBOT POSITION::。
oneclasssvm参数
`OneClassSVM` 是一个无监督学习模型,它通常用于异常检测。
它不需要标签信息,并且假设数据点都是正常的,只有一小部分数据点是异常的。
在 `scikit-learn` 中,`OneClassSVM` 的参数包括:1. **kernel**:核函数。
可以是'linear', 'poly', 'rbf', 'sigmoid' 中的一个。
默认是 'rbf'。
2. **degree**:多项式核函数的度。
只在多项式核中有效。
3. **gamma**:核函数的系数。
如果 kernel 是 'linear',gamma 必须为 1。
如果 kernel 是 'poly','rbf' 或 'sigmoid',gamma 默认值为 1/(n_features * (n_features - 1) / 2)。
4. **coef0**:核函数的常数项。
只在 'poly' 和 'sigmoid' 中有效。
5. **nu**:nu-SVM 的参数。
它是一个介于 0 和 1 之间的值,控制错误分类的比例。
更大的 nu 更保守,将更多的点视为异常。
6. **kernel_params**:其他核函数参数。
例如,对于 'rbf' 核,您可以使用关键字参数 gamma, coef0, 或者 degree。
7. **eps**:决定异常的上界和下界之间的间隔的参数。
异常点在上下边界之外。
8. **metric**:距离度量方法,用于计算输入样本之间的距离。
可以是'euclidean', 'manhattan', 'chebyshev', 'hamming','jaccard' 或 'precomputed' 中的一个。
SVM一对一多分类的图像反馈检索优化
SVM一对一多分类的图像反馈检索优化王冲;马晓楠;宋冬慧【摘要】针对多语义图像在用户图像检索反馈过程中带来的困扰, SVM在图像多分类过程中分类器同等对待等问题, 提出基于K-means和SVM一对一多分类的图像反馈检索优化算法KWOVOSVM (K-means and weighted one-versus-one support vector machine) .运用K-means算法对图像特征进行多次聚类, 选取最具代表的信息图像样本供用户反馈;在用户反馈过程中, 对其图像样本进行多分类训练时, 通过欧式距离计算对每个分类器分配相对权重, 使用户反馈次数减少, 图像检索结果不断接近用户需求.实验结果表明, KWOVOSVM算法在查准率和满意度上有一定的提高.%Aiming at some problems such as semantic images of the user feedback for the content-based image retrieval system, and equal SVM classifiers during the images multi-classification process, a KWOVOSVM algorithm was proposed, researching on improved image feedback retrieval method based on K-means and one-versus-one multi-class algorithm of SVM.Features of the image were extracted and clustered with the multiple clusters of the K-means algorithm, and the most useful information about image samples was selected.The image samples were trained, and they were for the relative weight distribution of each SVM classifier using Euclidean distance.Experimental results show that KWOVOSVM algorithm can improve the precision and satisfaction.【期刊名称】《计算机工程与设计》【年(卷),期】2019(040)001【总页数】6页(P173-178)【关键词】图像检索;一对一多分类;K-means算法;用户反馈;KWOVOSVM算法【作者】王冲;马晓楠;宋冬慧【作者单位】桂林电子科技大学计算机与信息安全学院,广西桂林 541004;桂林电子科技大学计算机与信息安全学院,广西桂林 541004;桂林电子科技大学计算机与信息安全学院,广西桂林 541004【正文语种】中文【中图分类】TP391.30 引言用户在进行图像检索时,由于“语义鸿沟”,初次检索出来的图像往往不能满足用户的需求。
一种新的中文文本分类算法——One Class SVM-KNN算法

一种新的中文文本分类算法——One Class SVM-KNN算法刘文;吴陈【期刊名称】《计算机技术与发展》【年(卷),期】2012(22)5【摘要】中文文本分类在数据库及搜索引擎中得到广泛的应用,K-近邻(KNN)算法是常用于中文文本分类中的分类方法,但K-近邻在分类过程中需要存储所有的训练样本,并且直到待测样本需要分类时才建立分类,而且还存在类倾斜现象以及存储和计算的开销大等缺陷.单类SVM对只有一类的分类问题具有很好的效果,但不适用于多类分类问题,因此针对KNN存在的缺陷及单类SVM的特点提出One Class SVM-KNN算法,并给出了算法的定义及详细分析.通过实验证明此方法很好地克服了KNN算法的缺陷,并且查全率、查准率明显优于K-近邻算法.%Text classification is widely used in database and search engine. KNN is widely used in Chinese text categorization,however, KNN has many defects in the application of text classification. The deficiency of KNN classification algorithm is that all the training samples are kept until the samples are classified. When the size of samples is very large, the storage and computation will be costly, which will result in classification deviation. One class SVM is a simple and effective classification algorithm in one class. To solve KNN problems, a new algorithm based on harmonic one-class-SVM and KNN was proposed, which will achieve better classification effect. The experiment result is shown that the recall computed using the proposed method is obviously more highly than the KNN method.【总页数】4页(P83-86)【作者】刘文;吴陈【作者单位】江苏科技大学智能信息处理实验室,江苏镇江212003;江苏科技大学智能信息处理实验室,江苏镇江212003【正文语种】中文【中图分类】TP301.6【相关文献】1.一种基于复杂网络的中文文本分类算法 [J], 赵辉;刘怀亮;张倩2.一种新的中文文本分类算法 [J], 郑凤萍3.一种基于中心文档的KNN中文文本分类算法 [J], 鲁婷;王浩;姚宏亮4.一种新的基于SVM-KNN的Web文本分类算法 [J], 曹建芳;王鸿斌5.一种基于多特征因子改进的中文文本分类算法 [J], 叶敏;汤世平;牛振东因版权原因,仅展示原文概要,查看原文内容请购买。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
ONE-CLASS SVM FOR LEARNING IN IMAGE RETRIEVAL Yunqiang Chen, Xiang Zhou, and Thomas S. Huang{chenyq, xzhou2,huang}@405 N. Mathews Ave., Beckman InstituteUniversity of Illinois at Urbana-ChampaignUrbana, IL 61820ABSTRACTRelevance feedback schemes using linear/quadratic estimators have been applied in content-based image retrieval to significantly improve retrieval performance. One major difficulty in relevance feedback is to estimate the support of target images in high dimensional feature space with a relatively small number of training samples. In this paper, we develop a novel scheme based on one-class SVM, which fits a tight hyper-sphere in the non-linearly transformed feature space to include most of the target images based on the positive examples. The use of kernel provides us an elegant way to deal with non-linearity in the distribution of the target images, while the regularization term in SVM provides good generalization ability. To validate the efficacy of the proposed approach, we test it on both synthesized data and real-world images. Promising results are achieved in both cases.1. INTRODUCTION1.1 BackgroundContent-based image retrieval has received much interest in the last decades due to the large digital storage and easy access of images on computers and through the World Wide Web [1]. A major challenge in CBIR system comes from the dynamic interpretation of images by different users at different times, thus adaptive real-time learning and/or classification is required. The computer can only detect the low-level features, e.g., texture, color histogram and edge features while the user’s demand may be very high-level concepts. To bridge this large gap between humans and computers, computers have to be able to learn which features best describe the pictures in user’s mind on-line.Relevance feedback and on-line learning techniques have been shown to provide dramatic performance boost in CBIR systems [3][5][9][10]. The strategy is to ask the user to give some feedbacks on the results returned in the previous query round and try to refine the search strategy and come up with a better result-set based on these feedbacks. Majority of the work uses relevance feedback to learn the relative importance of different features, with some tries to learn a feature weighting scheme either with [5] or without [3][6] considering correlations among feature components; while others either use a probabilistic scheme [4], or Self-Organizing Maps [15], or boosting technique [13], etc., to do so. Many of the algorithms are heuristics-based, which are fast and robust, but relying on the condition that one can find the right parameters [4][5][14]. Discriminant analysis on the examples given by the user is applied for dimensionality reduction, assuming two classes, before the Expectation-Maximization (EM) algorithm is used in a transductive learning framework [10]. This scheme has the potential difficulty in computational expenses, especially when the database is large. Recently there is also preliminary attempt to incorporate Support Vector Machine (SVM) into relevance feedback process [8].1.2 One Class or Two ClassesA typical problem with CBIR system with relevance feedback is the relatively small number of training samples and the high dimension of the feature space. The system can only present the user with a few dozen of images to label (relevant or irrelevant). The interesting images to the user are only a very small portion of the large image database, in which most images remain unlabeled. Much work regards the problem as a strict two-class classification problem, with equal treatments on both positive and negative examples. It is reasonable to assume positive examples to cluster in certain way, but negative examples usually do not cluster since they can belong to any class. It is almost impossible to estimate the real distribution of negative images in the database based on the relevant feedback. An illustration of the undesirable result reached by two-class SVM is given in Figure 1.1.3 Prior Knowledge (Assumptions)Different assumptions about the distribution of the target images have been proposed in the literature.In Proc. IEEE Int'l Conf. on Image Processing 2001, Thessaloniki, GreeceGaussian assumption is the most common and convenient one [14]. It assumes the target pictures are distributed in the feature space as a single mode Gaussian. But because of the large gap between the high level concepts and low level features, it is hard to justify this assumption. Some go to another extreme. They assume each returned positive image as a mode and try to get the target images from the nearest neighbor of each relevant image. This method will be too sensitive to the training images and it does not have good generalization capability.Figure 1 Decision boundary of a two-class SVM: Thecircles are the positive images, the crosses are thenegative ones, and the black dots are the unlabeledimages. The decision boundary (the dashed line) willclassify many non-target images as positive.1.4 The Proposed SchemeIn this paper, we try to fit a tight hyper-sphere in the feature space to include most positive training samples. This task is formulated into an energy optimization problem. It is then changed to a dual form and kernels are introduced. Because the distribution of the target images cannot be decided, we should not restrict ourselves to a special kind of distribution assumption. In this scheme, the non-linearity can be represent implicitly in the kernel evaluations. The computational cost will not change much from the non-kernel counterpart. As long as the assumption about the distribution can be represented in a kernel form, our algorithm can be used with high efficiency for online image retrieval.The rest of the paper is organized as follows. Section 2 describe our One-class SVM in details and give some discussion on different kernels. Section 3 presents the experimental results on the real database. The conclusions and future work are listed in section 4.2. ONE-CLASS SVMIn this paper, we try to estimate the distribution of the target images in the feature space without over-fitting to the user feedbacks. Because of the good generalization ability of SVM [7], we try to estimate the support that can include most of the relevant images with some regularization to single out outliers. The algorithm is named One-class SVM [11] since only positive examples are used in training and testing.2.1 One class SVMWe first introduce terminology and notation conventions. We consider training dataℵ∈lXXX,,21where l∈Ν is the number of observations. Let Φ be a feature map F→ℵ.Our strategy is to map the data into the feature space and then try to use a hyper-sphere to describe the data in feature space and put most of the data into the hyper-sphere. This can be formulated into an optimization problem. We want the ball to be as small as possible while at the same time, including most of the training data. We only consider the positive points and get the objective function in the following form (primal form):+∈ℜ∈ℜ∈iiFcR vlRlζζ1min2,,][,)(..22liforRcXt siii∈≥+≤−ΦζζThe trade off between the radius of the hyper-sphere and the number of training samples that it can hold is set by the parameter v∈[0,1]. When v is small, we try to put more data into the “ball”. When v is larger, we try to squeeze the size of the “ball”.We can solve this optimization with Lagrangian multipliers:[]===−+−−−Φ+=liiiliiliiiivlRcXRcRL1112221)(),,,,(ζβζζαβαζ1)1(2==−=∂∂iiRRLαα(1)vlvlLiiii11≤≤=−−=∂∂αβαζ(2)()Φ==−Φ−=∂∂)()(2iiiiXccXcLαα(3)The equation (1) and (2) turn out to be the constraints while equation (3) tell us the c (center of the ball) can be expressed as the linear combination of Φ(X), which make it possible to express the dual form with kernel functions.1,1..),(),(min,=≤≤−i iii iiiji jijivlt sXXkXXkααααααThe optimal ’s can be got after solving this dual problem by the QP optimization methods. We can rank all the images in the database by the following decision function:−+−=ii i j i j i j i X X k X X k X X k R X f ),(),(2),()(,2αααThe images with higher scores are more likely to be the target images.2.2 Linear Case: LOC-SVM (One-Class SVM) First we try the linear case. For linear case, the algorithm just tries to fit a hyper-sphere to cover the training points with outlier detection. A synthetic training data set is generated to illustrate our algorithm. The training sample is randomly generated according to x = N (, ), where = (5, 0)T , = I. One can see that in Figure 2(b), the learning machine catches the distribution without over-fitting. The decision function evaluates the largest value at [5.0, 0.15] which is very close to the true center. It tries to put a circle in the 2D dimension to include most positive samples while leave some out as outlier. The parameter can be tuned to control the amount of outliers.(a)(b)Figure 2: (a) shows the training points we generated. The dots are the samples that have positive evaluation from the decision function after training. The crosses are the samples that are detected as outliers and have negative evaluation from the decision function. (b) is the decision value for all the points in the 2D feature space. It takes the largest value at [5.0, 0.15] But in feature space, we cannot assume that the target images are clustered in spherical shape—images can have complicated non-linear distributions. However by using kernel-based form of this algorithm, non-linear distribution can be dealt with in the same framework.2.3 Non-linear Case Using Kernel (KOC-SVM) In this section, we discuss the use of reproducing kernel to deal with non-linear, multi-mode distributions using KOC-SVM (Kernel One-class SVM). A good choice is the Gaussian kernel in the following form:222/),(σYX eY X K −−=To test KOC-SVM’s ability to capture non-linearity such as a multi-mode distribution, training data are jointly sampled from three Gaussian modes. We also generate some sparse outliers from a uniform distribution over the feature space. After training, the decision function in the feature space is shown in Figure 3 (b). It is apparent that KOC-SVM captures the multimode fairly well. It is important to note that this learning machine has the capability of removing outliers in an intelligent way, unlike the way a non-parametric Parzen window densityestimator works.(b)Figure 3: (a) shows all the training set we generated from three Gaussians. The dots are the samples which have positive evaluation from the decision function. The crosses are the samples which are detected as outliers and get negative decision function values. (b) decision values for all the points in the 2D feature space. White means high value while black means low value.3. EXPERIMENT RESULTSFinally, tests on the real-world images are conducted. We constructed a fully labeled image database. It has five classes each with 100 images. These are: airplanes, cars, horses, eagles and stained glasses. 10 images are randomly drawn as training samples and the learned decision function is applied to rank all the 500 images in the database. The hit rates in the first 20 and 100 images are used as the performance measures. Specifically, for each class 100 tests are performed with only 10 randomly drawn training samples and the average error rate is recorded as shown in the following table. Tested against is the WT (Whitening Transform), which is the relevance feedback technique reported in [3][6] (Note that in [6], a two-level structure is adopted to better deal with singularity issues. Here we use one-level and use regularization terms to bring the covariance matrix out of singularity.) LOC-SVM is the worst for apparent reasons that it lacks flexibility in modeling variations in distributions. WT is better since it can model multivariate Gaussian distribution. KOC-SVM gives the best results due to its capability in nonlinear modeling.Table 1: Averaged Error rate for image retrievalusing LOC-SVM (One-class SVM), WT(Whitening Transform), and KOC-SVM (KernelOne-class SVM), all with 10 training samples.Average Error Rate LOC-SVM WT KOC-SVMin top 20 8.63% 2.20% 1.47%in top 100 35.12% 29.28%26.38%4. CONCLUSION AND FUTURE WORKIn this paper, statistical learning method is used to attack the problems in content-based image retrieval. We developed a common framework to deal with the problem of training with small samples. Kernel machines provide us a way to deal with non-linearity in an elegant way. Promising results are presented.Some more research should be done in how to choose appropriate kernel for CBIR. Also, it is desirable to have a systematic scheme for tuning the parameters such as the spread of the Gaussian and the strength of the regularization term.ACKNOWLEDGEMENTSThis work was supported in part by National Science Foundation Grant CDA 96-24396, IIS-00-85980 and EIA 99-75019.REFERENCES[1] M. Flickner. et al., “Query by image and video content: Theqbic system”, IEEE Computers. 1995[2] G. Rätsch, B. Schölkopf, S. Mika, and K. R. Müller. “SVMand boosting: One class”, Technical Report 119, GMD FIRST, Berlin, November 2000.[3] Y. Ishikawa, R. Subramanya, and C. Faloutsos,“MindReader Query databases through multiple examples”, in Proc. Of the 24th VLDB Conf. (New York), 1998[4] J. Peng, B. Bhanu, and S.Qing, “Probabilistic featurerelevance learning for content-based image retrieval”, Computer Vision and Image Understanding, 75:150-164, 1999[5] Y. Rui, T. S. Huang, M. Ortega, and S. Mehrotra“Relevance Feedback: A Power Tool in Interactive Content-Based Image Retrieval”, IEEE Tran on Circuits and Systems for Video Technology, Vol 8, No. 5, Sept., 644-655, 1998,[6] Y. Rui, T. S. Huang, “Optimizing learning in imageretrieval”, Proc. IEEE CVPR, 2000, 236-243[7] V. Vapnik, “The Nature of Statistical Learning Theory”,Springer Verlag, New York, 1995[8] Q. Tian, P. Hong, T. S. Huang, "Update Relevant ImageWeights for Content-Based Image Retrieval Using Support Vector Machines", IEEE International Conference on Multimedia and Expo (ICME'2000), Hilton New York & Towers, New York, NY, July 30 - Aug. 2, 2000.[9] N. Vasconcelos, A. Lippman, “Bayesian relevancefeedback for content-based image retrieval”, in Proc.IEEE Workshop on Content-based Access of Image and Video Libraries, CVPR’00, Hilton Head Island, SC, 2000 [10] Y. Wu, Q. Tian, T. S. Huang, "Discriminant EM Algorithmwith Application to Image Retrieval", IEEE Conf.Computer Vision and Pattern Recognition (CVPR)'2000, Hilton Head Island, South Carolina, June 13-15, 2000. [11] B. Scholkopf, J. C. Platt, J. T. Shawe, A. J. Smola, R. C.Williamson, “Estimation the support of a high-dimensional Distribution”, Technical Report MSR-TR-99-87, Microsoft Research[12] I. J. Cox, M. Miller, T. Minka, P. Yianilos, “An OptimizedInteraction Strategy for Bayesian Relevance Feedback”, IEEE Conf. Computer Vision and Pattern Recognition (CVPR'98)[13] K. Tieu and P. Viola, “Boosting Image Retrieval”, IEEEConf Computer Vision and Pattern Recognition (CVPR'00), Hilton Head, South Carolina[14] C. Nastar, M. Mitschke and C. Meilhac “Efficient QueryRefinement for Image Retrieval”, IEEE Conf. Computer Vision and Pattern Recognition CVPR'98, Santa Barbara, CA, June 1998.[15] J. Laaksonen, M. Koskela, and E. Oja. “PicSOM: Self-Organizing Maps for Content-Based Image Retrieval”, Proc. of IJCNN'99. Washington, DC. July 1999。