数控脉宽脉冲发生器剖析
数控脉宽脉冲信号发生器v

06 数控脉宽脉冲信号发生器 的应用实例
在自动化控制系统中的应用
自动化控制
数控脉宽脉冲信号发生器在自动化控制系统中用于产生精确的脉冲信号,控制各种执行机 构如电机、气动阀等,实现自动化生产线的精确控制。
位置控制
通过产生不同占空比的脉冲信号,数控脉宽脉冲信号发生器可以精确控制物体的位置,如 数控机床的定位精度。
指脉冲信号发生器能够调节的脉冲宽度的范围。脉冲宽度调 节范围越广,信号发生器的应用灵活性越高。
脉冲宽度精度
指脉冲信号发生器输出的脉冲宽度的精度。脉冲宽度精度越 高,信号发生器的性能越优异。
输出电压幅度
输出电压幅度
指脉冲信号发生器输出的脉冲信号的 电压幅度。输出电压幅度越高,信号 发生器的驱动能力越强。
定义与特点
定义
数控脉宽脉冲信号发生器是一种 能够产生具有可调脉宽的脉冲信 号的电子设备。
特点
具有高精度、高稳定性和高可靠 性,能够产生多种不同脉宽的脉 冲信号,广泛应用于测试、测量 和控制系统等领域。
工作原理
01
工作原理
数控脉宽脉冲信号发生器通过数字控制技术,对脉冲信号的宽度进行精
确调节。它通常由一个脉冲源和一个数字控制电路组成,数字控制电路
清洁与保养
使用干燥的布擦拭信号发生器 的外壳表面,保持清洁。
清洁信号发生器的散热口,确 保散热良好。
对于需要润滑的部位,定期添 加润滑油,保持其正常运转。
常见故障排除
如果信号发生器无法正常启动,首先检查电源是 否正常,然后检查是否有明显的硬件故障。
如果信号发生器输出的信号失真,可能是由于信 号源或信号线的问题,需要检查和更换。
STM32的PWM精讲

STM32的PWM精讲通过对TM1定时器进行控制,使之各通道输出插入死区的互补PWM输出,各通道输出频率均为17.57KHz。
其中,通道1输出的占空比为50%,通道2输出的占空比为25%,通道3输出的占空比为12.5%。
各通道互补输出为反相输出。
TM1定时器的通道1到4的输出分别对应PA.08、PA.09、PA.10和PA.11 引脚,而通道1到3的互补输出分别对应PB.13、PB.14和PB.15引脚,中止输入引脚为PB.12。
将这些引脚分别接入示波器,在示波器上观查相应通道占空比的方波[12]。
配置好各通道后,编译运行工程;点击MDK的Debug菜单,点击Start/Stop Debug Session;通过示波器察看 PA.08、PA.09、PA.10、PB.13、PB.14、PB.15 的输出波形,其中PA.08和PB.13为第一通道和互补通道,PB.09和PB.14为第二通道和其互补通道,PB.10和PB.15为第三通道和其互补通道;第一通道显示占空比为50%,第二通道占空比为25%,第三通道占空比为12.5%。
第2章STM32处理器概述STM32F103xx增强型系列产品中内置了多达3个同步的标准定时器。
每个定时器都有一个16位的自动加载递加/递减计数器、一个16位的预分频器和4个独立的通道,每个通道都可用于输入捕获、输出比较、PWM和单脉冲模式输出,在最大的封装配置中可提供最多12个输入捕获、输出比较或PWM通道。
它们还能通过定时器链接功能与高级控制定时器共同工作,提供同步或事件链接功能。
在调试模式下,计数器可以被冻结。
任一个标准定时器都能用于产生PWM 输出。
每个定时器都有独立的DMA请求机制。
2.4.2 高级控制定时器[22]高级控制定时器(TM1)由一个16位的自动装载计数器组成,它由一个可编程预分频器驱动。
它适合多种用途,包含测量输入信号的脉冲宽度(输入捕获),或者产生输出波形(输出比较,PWM,嵌入死区时间的互补PWM等)。
正泰PDM1KW中波发射机调制器原理剖析与故障维修
正泰PDM 1kW中波发射机调制器原理剖析与故障维修摘要:PDM中波发射机就即脉冲宽度调制( Pulse width modulation)中波发射机。
由于PDM中波发射机具有体积小、效率高、安装调试方便的特点,因而被中小功率广播发射台采用。
PDM中波发射机的调制电路的稳定与否决定播出系统效果。
作为发射台的技术管理和技术维护人员,熟悉和了解调制器电路的工作原理是做好技术维护工作的基本条件。
本文以ZHTPDM1kW-Ⅲ型发射机为例,对调制器电路原理进行剖析,并结合两个调制器方面的故障案例,详细论述了PDM中波发射机调制器故障的维修方法和技巧,仅供同行参考。
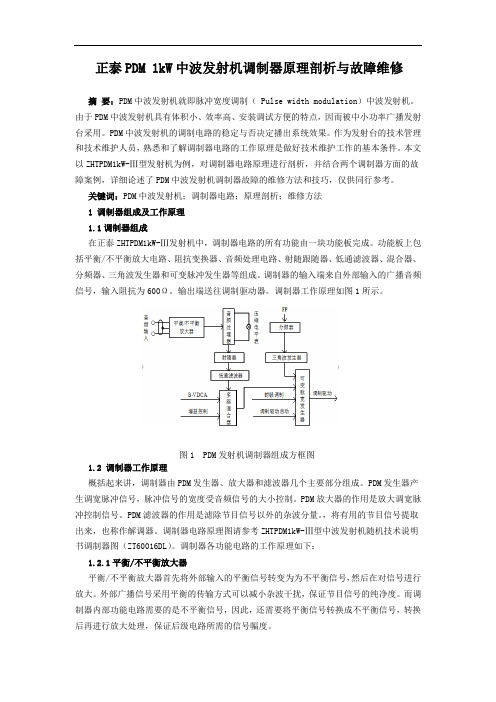
关键词:PDM中波发射机;调制器电路;原理剖析;维修方法1 调制器组成及工作原理1.1调制器组成在正泰ZHTPDM1kW-Ⅲ发射机中,调制器电路的所有功能由一块功能板完成。
功能板上包括平衡/不平衡放大电路、阻抗变换器、音频处理电路、射随跟随器、低通滤波器、混合器、分频器、三角波发生器和可变脉冲发生器等组成。
调制器的输入端来自外部输入的广播音频信号,输入阻抗为600Ω。
输出端送往调制驱动器。
调制器工作原理如图1所示。
1.2 调制器工作原理概括起来讲,调制器由PDM发生器、放大器和滤波器几个主要部分组成。
PDM发生器产生调宽脉冲信号,脉冲信号的宽度受音频信号的大小控制。
PDM放大器的作用是放大调宽脉冲控制信号。
PDM滤波器的作用是滤除节目信号以外的杂波分量。
,将有用的节目信号提取出来,也称作解调器。
调制器电路原理图请参考ZHTPDM1kW-Ⅲ型中波发射机随机技术说明书调制器图(ZT60016DL)。
调制器各功能电路的工作原理如下:1.2.1平衡/不平衡放大器平衡/不平衡放大器首先将外部输入的平衡信号转变为为不平衡信号,然后在对信号进行放大。
外部广播信号采用平衡的传输方式可以减小杂波干扰,保证节目信号的纯净度。
而调制器内部功能电路需要的是不平衡信号,因此,还需要将平衡信号转换成不平衡信号,转换后再进行放大处理,保证后级电路所需的信号幅度。
脉冲发生器

③脉冲信号发生器。能产生宽度、幅度和重复频率可调的矩形脉冲的发生器,可用以测试线性系统的瞬态响 应,或用作模拟信号来测试雷达、多路通信和其他脉冲数字系统的性能。
先后用数字的方法研制了两种随机脉冲产生器。一种用单片机给出随机脉冲间隔;第二种用伪随机码给出随机 脉冲 。
超短
对于超高分辨率雷达、扩频通信技术以及其它许多需要宽带辐射的应用来说,超短脉冲发生器是十分重要的, 从某种程度上来讲,超短脉冲的形成技术已成为许多宽带应用中的核心技术。目前,有许多有关该技术的研究集中 在激光二极管驱动的GaAs光开关上,但是这些器件还不能在小于200 ps的情况下正常工作,同时,激光二极管还存 在重复率和可靠性方面的问题。另外一些产生高速瞬变电压的方法还有GaAs可控硅等,但是GaAs可控硅作为一种 成熟的产品还需一段时间 。
随机
放射性原子核的衰变在时间上是随机的。因此,一个放射源在单位时间内发生衰变的原子核数围绕其平均值成 泊松分布。核探测器接收到的信号计数率也围绕平均计数率呈泊松分布。其他随机过程,例如一定束流轰击靶发生 的反应数、正负电子束团对撞时单位时间内发生的事例数也都遵循同样的规律 。
一般,在检测电子电路和数据获取系统的性能时用脉冲产生器来模拟从核探测器来的信号。脉冲产生器信号是 周期性的,它们之间的时间间隔总是一样的。而一些较复杂的系统对周期性脉冲和随机脉冲的反应可能不一样,特 别是当计数率接近系统的处理能力的极限时。为了检测电子电路和数据获取系统在随机触发下的性能,需1、液压脉冲发生器液压脉冲发生器包括一个安装在进水管(1)上的液压气动蓄能器(2),此蓄能器通过 第一导管(3)与振荡发生器(4)连接,振荡发生器再通过第二导管(5)与水流转换器(6)连接。水流转换器 包括工作喷嘴(7)和排水喷嘴(8)。第二导管(5)至少由两段不同直径的管子(9、10)连接而成,前一段 (9)的直径为后一段(10)的直径的两倍。
计算机数控装置的硬件结构
2019年5月13日
感谢你的观看
13
缓冲寄存器: 组成:由四组D型触发器组成,每组有四个D触 发器。 功能:存放表示跟随误差的十六位二进制数的 每一位。 原理:每一个采样周期,在地址译码信号、数 据输出请求的译码信号、数据选通输入信号 (均为低电平有效)同时有效时,发出一个采 样脉冲,利用采样脉冲的后沿,将数据总线上 数据和符号,读入到缓冲寄存器中。
2019年5月13日
感谢你的观看
14
二进制计数器:
组成:由四组二进制计数器组成,并接成加法
计数形式。
原理:缓冲寄存器存有跟随误差数值后,经一
定的延时,在D/A传送信号和计数时钟同步后产
生置入脉冲信号,将数据置入二进制计数器中,
置入计数器的数据有15位表示数值(
),
一位表示符号( ),当符号位为高电平时,
2019年5月13日
感谢你的观看
22
以电压输入的接收点(如P157图4.2.8)
2019年5月13日
感谢你的观看
23
②输出接口 分类:继电器输出电路、无触点输出电路(如 P157图4.2.9)
2019年5月13日
感谢你的观看
24
负载为指示灯的典型信号输出电路(如P157图4.2.10)
2019年5月13日
图4.2.4(1)、位置输出模板如P152图4.2.4(2))
1、位置控制芯片 工作原理:CPU输出的位置指令,经过芯片MB8739处理后, 送往D/A变换,再经过速度控制单元以控制电机运动,电机的 轴上装有光电脉冲发生器,随着电机转动产生系列脉冲,该脉 冲经接收器后反馈到MB8739,然后将其分为两路,一路作为 位置量的反馈,一路经频率/电压(F/V)变换,作为速度量的 反馈信号送往速度控制单元。
脉冲发生器与电极导线

电池电压
电池
锌汞电池 锂碘电池
时间
电池
目前采用锂碘电池: 电池的电量用安时(Ah)表示,目前通常为1.0~1.5 Ah 开路电压为2.8V,通过充电泵(倍压器),可输出5V 以上的电压
电池的不同阶段
BOS
大约5~8年
ERT
EOS
大约6个月
BOS ( Begin of Service ):起搏器开始植入人体 ERI ( Elective Replacement Indication ):选择更换指征(ERT) EOS ( End of Service ):起搏器寿命终结
生物电 300
频率 (HZ)
1000
保护电路
❤ 当出现较强的干扰时,起搏器将自动转换为固定方式起搏,以防止电 磁干扰是出现脉冲抑制现象。
❤ 起搏器内滤波电路具有辨别和阻拦来自电磁干扰及心内某些无需被感 知的信号,只让含有P或R波的基本频率成分信号通过,以此消除误感 知。
❤ 起搏器内部有独立的奔放保护电路,当出现故障时限制起搏器频率不 得超过设定值。
集成电路: 控制单元、输出电路、感知电路、时钟、 遥测及通讯电路、存储器等
分立单元: 充电泵(电容)、簧片开关、传感器、射 频通讯线圈等。
电池
锌汞电池
锂碘电池
起搏器对电池的要求:寿命长、体积小、要有足够的开路电压,电池易于密 封,不得外泄,安全可靠,电池构型要有一定的可塑性,电池自身放电率小, 电池电量接近耗竭时能够预测,变换电压应准确可靠。
主动固定导线
被动固定型电极导线
Unipolar 单极
Bipolar 双极
主动固定和被动固定
冠状窦电极
电极导线的外部构造
导线插头
用SIMULINK实现脉宽_脉频调制中的占空比控制

用SIMU L INK实现脉宽/脉频调制中的占空比控制顾临怡1,胡志刚1,刘莹冰2Approach of Plus W idth/Plus Frequency M odulate in SIM U LINKG u Lin2yi1,Hu Zhi2gang1,Liu Y ing2bing2(11浙江大学流体传动及控制国家重点实验室,浙江杭州 310027;21杭州市长征中学,浙江杭州 310012)摘 要:提出一种在利用Matlab仿真软件中的Simulink模块进行仿真时,通过一个可控频率的三角波发生器与反馈量的比较,实现脉宽或脉频调制中的占空比控制的方法,并进行了相应的理论分析与仿真研究。
结果表明,该方法大幅度简化了脉宽或脉频调制波发生器的结构,提高了仿真的效率。
关键词:仿真;脉宽调制;脉频调制中图分类号:TH271+132 文献标识码:B 文章编号:100024858(2003)09200012031 前言随着高速开关控制技术在控制领域应用的不断拓广,各类基于脉宽或脉频调制的控制系统在工程领域也得到了越来越广泛的应用。
尤其在液压领域,随着本世纪初开关液压源理论的提出[1],在继20世纪90年代出现高速开关阀之后,掀起了新一轮基于脉宽或脉频调制的占空比控制的研究高潮。
然而,由于仿真软件所采用的算法(欧拉法、龙格-库塔法、Adams法等)大多把仿真时间作为一个基准量,对其他的物理量进行数学处理,因而很难产生一个占空比可控的脉宽调制(PW M)信号,要产生一个脉频调制(PFM)信号就更加困难了。
以Matlab仿真软件中的Simulink模块为例,当利用反馈量与给定量的比较产生一个占空比给定值后,需要将仿真步长设为定值,并用Matlab程序先编写一个复杂的.M文件产生脉宽或脉频调制信号,在Simulink中再调用该文件,程序结构复杂,仿真效率较低。
为此,本文提出一种通过可控频率的三角波发生器与反馈量比较产生占空比可控的脉宽或脉频调制波的方法,无需将仿真步长设为定值和编写复杂的.M文件,简化了程序结构,并提高了仿真效率。
脉冲信号发生器的工作原理

脉冲信号发生器的工作原理脉冲信号发生器是一种用于产生特定频率、特定宽度和特定幅度的脉冲信号的仪器。
它广泛应用于科研、工程和测试领域,如脉冲激励、脉冲响应测试、数字系统设计等。
下面将详细介绍脉冲信号发生器的工作原理。
一、脉冲信号发生器的基本组成脉冲信号发生器主要由以下几个部分组成:1.时钟源:提供稳定的时钟信号,作为脉冲信号发生器的基准;2.频率调节电路:用于调节脉冲信号的频率;3.脉宽调节电路:用于调节脉冲信号的宽度;4.振幅调节电路:用于调节脉冲信号的幅度;5.输出电路:将调节后的脉冲信号输出。
脉冲信号发生器的工作原理可以分为如下几个步骤:1.时钟信号产生:脉冲信号发生器通过内部的时钟源产生一个稳定的时钟信号,作为脉冲信号的基准。
时钟信号的频率可以通过频率调节电路进行调节,一般可调范围较大,从几赫兹到几十兆赫兹不等。
2.脉冲信号的周期控制:通过调节频率调节电路,可以控制脉冲信号的周期。
频率调节电路一般采用可变电容、电感等元件,通过改变电容或电感的值来改变信号的频率。
当电容或电感的值较大时,频率较低;反之,频率较高。
3.脉冲信号的宽度控制:通过调节脉宽调节电路,可以控制脉冲信号的宽度。
脉宽调节电路一般采用可变电阻、可变电容等元件,通过改变电阻或电容的值来改变信号的宽度。
当电阻或电容的值较大时,脉冲宽度较长;反之,脉冲宽度较短。
4.脉冲信号的幅度控制:通过调节振幅调节电路,可以控制脉冲信号的幅度。
振幅调节电路一般采用可变电阻、运放等元件,通过改变电阻或运放的增益来改变信号的幅度。
当电阻或运放的增益较大时,脉冲信号的幅度较高;反之,脉冲信号的幅度较低。
5.脉冲信号的输出:调节完脉冲信号的频率、宽度和幅度后,信号将通过输出电路输出。
输出电路一般包括放大器、滤波器等,用于增强信号的幅度和滤除杂散信号。
输出接口可以是BNC接口、插针接口等,用户可以根据需要选择合适的接口类型。
三、脉冲信号发生器的应用脉冲信号发生器在实际应用中具有广泛的用途,主要包括以下几个方面:1.脉冲激励:脉冲信号发生器可以生成特定频率、宽度和幅度的脉冲信号,用于激励被测对象或被测系统。
实验三:PWM信号发生器
实验三:PWM信号发生器1.实验目的(1)学习Quartus II 8.0 软件的基本使用方法。
(2)学习GW48-CK EDA实验开发系统的基本使用方法。
(3)学习VHDL程序中数据对象,数据类型,顺序语句和并行语句的综合使用。
2.实验内容设计并调试好一个脉宽数控调制信号发生器,此信号发生器是由两个完全相同的可自加载加法计数器LCNT8组成的,它的信号的高低电平脉宽可分别由两组8位预置数进行控制。
3.实验条件(1)开发软件:Quartus II 8.0。
(2)实验设备:GW48-CK EDA实验开发系统。
(3)拟用芯片:EPM7128S-PL84。
4.实验要求(1)画出系统原理框图,说明系统中各主要组成部分的功能。
(2)编写各个VHDL源程序。
(3)根据系统功能,选好测试用例,画出测试输入信号波形或编好测试文件。
(4)根据选用的EDA实验开发装置编好用于硬件验证的管脚锁定表格或文件。
(5)记录系统仿真、逻辑综合及硬件验证结果。
(6)记录实验过程中出现的问题及解决办法。
5.实验过程(1)PWM即脉冲宽度调制,就是利用微处理器的数字输出来对模拟电路进行控制的一种非常有效的技术。
PWM从处理器到被控制系统信号都是数字式的,无需进行数/模转换。
让信号保持为数字形式可将噪声影响降到最小,因此广泛应用在测量、通信和功率控制与变换的许多领域中。
下图是一种PWM信号发生器的逻辑图,此信号发生器是由两个完全相同的可自加载加法计数器LCNT8组成的,它的输出信号的高、低电平脉宽可分别由两组8位预置数进行控制。
如果将初始值可预置的加法计数器的溢出信号作为本计数器的初始预置值加载信号LD,则可构成计数器初始值自加载方式的加法计数器,从而构成数控分频器。
图中D 触发器的一个重要功能就是均匀输出信号的占空比,提高驱动能力,这对驱动,诸如扬声器或电动机十分重要。
(2)VHDL源程序①8位可自加载加法计数器的源程序LCNT8.VHD--LCNT8.VHDLIBRARY IEEE;USE IEEE.STD_LOGIC_1164.ALL;ENTITY LCNT8 ISPORT(CLK,LD:IN STD_LOGIC;D:IN INTEGER RANGE 0 TO 255;CAO:OUT STD_LOGIC);END ENTITY LCNT8;ARCHITECTURE ART OF LCNT8 ISSIGNAL COUNT:INTEGER RANGE 0 TO 255;BEGINPROCESS(CLK)ISBEGINIF CLK'EVENT AND CLK='1'THENIF LD='1'THEN COUNT<=D;ELSE COUNT<=COUNT+1;END IF;END IF;END PROCESS;PROCESS(COUNT)ISBEGINIF COUNT=255 THEN CAO<='1';ELSE CAO<='0';END IF;END PROCESS;END ARCHITECTURE ART;②PWM信号发生器的源程序PWM.VHD--PWM.VHDLIBRARY IEEE;USE IEEE.STD_LOGIC_1164.ALL;ENTITY PWM ISPORT(CLK:IN STD_LOGIC;A,B:IN STD_LOGIC_VECTOR(7 DOWNTO 0);PWM:OUT STD_LOGIC);END ENTITY PWM;ARCHITECTURE ART OF PWM ISCOMPONENT LCNT8 ISPORT(CLK,LD:IN STD_LOGIC;D:IN STD_LOGIC_VECTOR(7 DOWNTO 0);CAO:OUT STD_LOGIC);END COMPONENT LCNT8;SIGNAL CAO1,CAO2:STD_LOGIC;SIGNAL LD1,LD2:STD_LOGIC;SIGNAL SPWM:STD_LOGIC;BEGINU1:LCNT8 PORT MAP(CLK=>CLK,LD=>LD1,D=>A,CAO=>CAO1);U2:LCNT8 PORT MAP(CLK=>CLK,LD=>LD2,D=>B,CAO=>CAO2);PROCESS(CAO1,CAO2)ISBEGINIF CAO1='1'THEN SPWM<='0';ELSIF CAO2'EVENT AND CAO2='1'THEN SPWM<='1';END IF;END PROCESS;LD1<=NOT SPWM;LD2<=SPWM;PWM<=SPWM;END ARCHITECTURE ART;(3)仿真结果验证PWM.VHD的时序仿真结果(4)逻辑综合结果6.实验总结经过本次实验,我学会了Quartus II 8.0 开发系统的基本操作,并对它有了一定的了解和认识。
课题 正负脉宽数控调制信号发生器

课题正负脉宽数控调制信号发生器
一、课题目的
1.熟练掌握预置计数器的描述方法。
2.掌握VHDL语言反馈信号的处理。
3.设计正负脉冲宽度可调的数控调制信号发生器。
二、课题原理
图14-1正负脉宽数控调制信号发生器框图
预置计数器比普通计数器多了一个预置端LD和预置数据端DATA。
当LD=1(或0)时,在下一个时钟脉冲过后,计数器输出端输出预置数DATA。
图14-1使正负脉宽数控调制信号发生器电路的框图。
从图14-1可以看到输出脉宽调制信号由计数器A、B的进位脉冲信号控制。
计数器A的进位脉冲使输出信号输出正脉冲,计数器B的进位脉冲使输出信号输出负脉冲,同时反馈信号使计数器A、B分别重新置数,从而达到控制正负脉冲宽度的目的。
三、课题内容
1.用VHDL语言设计各功能模块。
2.通过仿真或观察波形文件验证设计课题的正确性。
3.编译下载并通过示波器验证结果。
四、设计提示
1.选择电路可用一带清零端的D触发器构成,也可以用VHDL语言的进程语句进行描
述。
2.注意用到反馈信号的地方,输出信号线应定义成Buffer类型。
五、课题报告要求
1.写出各模块的源程序。
2.画出详细电路图并分析电路的工作原理。
3.画出电路工作时序波形图。
4.书写心得体会。
脉冲发生器工作原理
脉冲发生器工作原理脉冲发生器是一种用于产生脉冲信号的电子设备,它在许多领域都有着广泛的应用,比如通信、雷达、医疗设备等。
脉冲发生器的工作原理涉及到电子学、信号处理和控制系统等多个方面的知识,下面我们来详细了解一下脉冲发生器的工作原理。
首先,脉冲发生器的核心部件是脉冲发生电路,它通常由稳压电源、时钟电路、触发器和输出驱动器等组成。
当输入触发信号到达时,时钟电路开始计时,并在计时结束后触发触发器,触发器输出一个脉冲信号。
这个过程可以简单地理解为,触发信号到来后,脉冲发生电路开始工作,经过一段时间后输出一个脉冲信号。
其次,脉冲发生器的工作频率和脉冲宽度可以通过控制时钟电路的频率和触发器的参数来实现。
时钟电路的频率决定了脉冲信号的重复频率,而触发器的参数则影响了脉冲信号的宽度。
通过调节这些参数,我们可以实现对脉冲信号的精确控制,满足不同应用场景的需求。
另外,脉冲发生器还可以通过外部输入信号来触发脉冲输出,这使得它可以与其他设备进行同步工作。
比如在雷达系统中,脉冲发生器可以与天线控制系统同步工作,确保发射的脉冲信号与接收的信号之间保持一定的时间关系,从而实现目标的探测和测距。
此外,脉冲发生器还可以实现脉冲信号的调制和调制,比如调幅、调频和调相等。
这些功能使得脉冲发生器在通信系统中有着重要的应用,可以实现不同调制方式下的脉冲信号输出,满足不同的通信需求。
总的来说,脉冲发生器是一种能够产生脉冲信号的重要设备,它的工作原理涉及到电子学、信号处理和控制系统等多个方面的知识。
通过对时钟电路和触发器等关键部件的精确控制,脉冲发生器可以实现对脉冲信号的精确调控,满足不同应用场景的需求。
同时,脉冲发生器还可以与其他设备同步工作,实现更复杂的功能,比如在雷达系统和通信系统中有着广泛的应用。
希望通过本文的介绍,读者能够对脉冲发生器的工作原理有一个更加深入的理解。
数控脉冲宽度调制信号发生器
数控脉冲宽度调制信号发生器摘要:脉冲宽度调制(PWM),简称脉宽调制,是利用微处理器等的数字输出来对模拟电路进行控制的一种非常有效的技术,广泛应用在从测量、通信到功率控制于变换的许多领域中。
在本设计中设计了一种输出频率高、结构简单、控制方便的数控脉冲宽度调制信号发生器,脉冲的占空比及周期由两个8位的预置输入A、B确定。
核心器件采用Altera公司的CPLD芯片,大大缩减了电路的体积,提高了电路的稳定性,产生的PWM能达到较高的频率。
信号发生器输出脉冲的占空比及周期可通过拔码开关方便地改变。
关键词:脉冲宽度调制,信号发生器,CPLDAbstract: the pulse width modulation (PWM), hereinafter referred to as the pulse width modulation is the use of microprocessors etc to the digital output to the analog circuit to control a very effective technology, widely used in measuring, from communication to power control to transform in many areas. In this design design A kind of high frequency output, simple structure, convenient control numerical control pulse width modulation signal generator, the pulse of empty ratio and cycle by two of the eight preset input of A and B sure. The core device using Altera company CPLD chip, greatly curtailed the volume of the circuit, improve the stability of the circuit, and the resulting PWM can achieve higher frequency. The output pulse signal generator of empty ratio and cycle can be pulled through code switch convenient to change.Keywords: pulse width modulation, signal generator, CPLD目录1、简介 (2)1.1 EDA简介 (2)1.2 Verilog HDL简介 (2)1.3 QuartusII简介 (2)2、总体方案设计 (5)2.1设计内容 (5)2.2设计方案比较 (5)2.3方案论证 (6)2.4方案选择 (7)3、单元模块设计 (8)3.1有源晶振电路 (8)3.2 供电电路 (9)3.3 PS配置电路 (10)3.4 八位计数器输入电路 (11)3.5 D触发器电路 (11)4、特殊器件的介绍 (12)4.1 CPLD器件介绍 (12)4.2 FPGA器件介绍 (12)4.3 EP1K30TC144器件介绍 (13)5、最小系统原理图 (14)6、软件实现 (15)6.1软件设计 (15)6.2思考题扩展 (17)7、系统仿真及调试 (19)7.1仿真 (19)7.2 调试 (20)8、总结 (22)8.1设计小结 (22)8.2设计收获 (22)8.3设计改进 (22)8.4 致谢 (22)9 、参考文献 (23)1.1 EDA简介EDA是电子设计自动化(Electronic Design Automation)的缩写,在20世纪90年代初从计算机辅助设计(CAD)、计算机辅助制造(CAM)、计算机辅助测试(CAT)和计算机辅助工程(CAE)的概念发展而来的。
数控脉冲中子发生器的设计
DOI:l0.3969/i.issn.1674-6082.2018.04.043
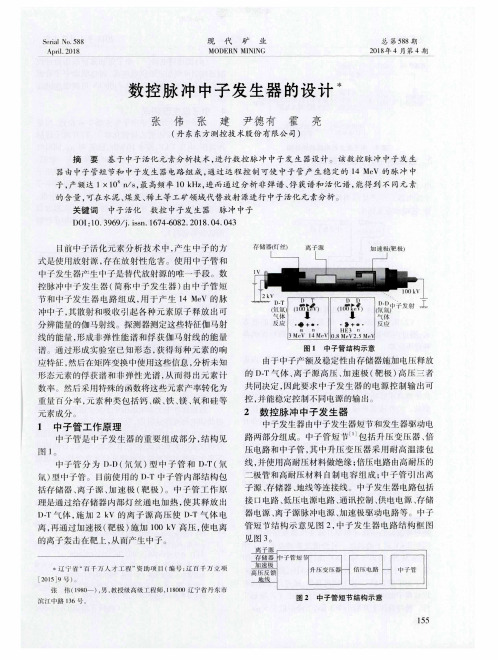
}I前 中子 活化 元 素 分 析技 术 中 ,产 生 中子 的 方 式 是使 用放 射 源 ,存 在放 射 性 危 害 。使 用 中子 管 和 中 子发 生器 产生 I}I子 足替 代放 射源 的唯 一手段 。数 控 脉 冲巾 子 发 牛 器 (简 称 中 子发 生 器 )由 中 子 管 短 节和 叶1子 发 生 器 电路 组 成 ,用 于 产 生 14 MeV 的 脉 冲 If1子 ,其散 射 和吸 收 引起 各 种 元 素 原 子 释 放 出 可 分 辨能 的伽 马射 线 。探测 器 测定这 些特 征伽 马射 线 的能量 ,形 成非 弹 性 能谱 和俘 获 伽 马 射线 的 能量 谱 、通 过 形成 实验 窀 已知 形 态 ,获得 每 种 元 素 的 响 应特 征 ,然 后在矩 阵变换 中使用 这些信 息 ,分析 未 知 形态 元素 的俘 获 谱和 非 弹 性 光谱 ,从 而 得 出元 素计 数率 然 后采 特 殊 的函数 将这 些元 素产 率转 化 为
挝 百 分率 ,厄素 种 类 包括 钙 、碳 、铁 、镁 、氧 和硅 等 元素成 分
l 中子管工作原理
巾 子管 是 中 子发 生 器 的重 要 组 成 部分 ,结 构 见
1、
中子 管 分 为 D—D(氘 氘 )型 中 子 管 和 D—T(氘 氚 )型 一 1 管 。 目前使 用 的 D—rr中子 管 内部 结 构 包 括存 储 器 、离 子 源 、加 速 极 (靶 极 )。 中 子 管 工 作 原 理 是通过 给 存储 器 内 部 灯 丝通 电加 热 ,使 其 释 放 出 I)-T气 体 ,施 加 2 kV 的离 子 源 高 压 使 D—rr气 体 电 离 .再 通 过加 速极 (靶 极 )施 加 100 kV高 压 ,使 电离 的 离子轰 击在靶 上 ,从 而产 生 中 子。
脉冲信号发生器
电子测量与仪器(第3版)
电子工业出版社
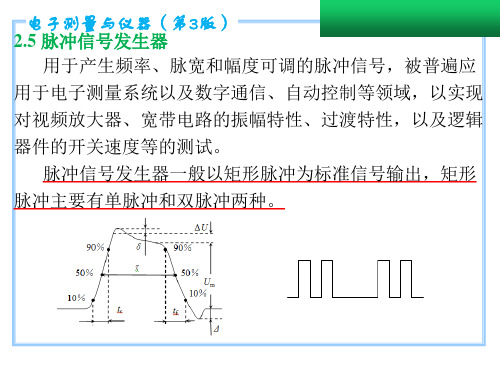
2.5 脉冲信号发生器
① 脉冲幅度Um ② 脉冲上升时间tr 又称为脉冲前沿 ③ 脉冲下降时间tf 又称为脉冲后沿 ④ 脉冲宽度τ 即脉冲持续时间
⑤ 平顶降落ΔU 是指脉冲顶部不能保持平直而呈现倾斜降 落的电压值。
⑥ 上冲量δ 是指上升沿超过幅度Um以上所呈现的突出部分 ⑦ 反冲量Δ 又称为下冲量,是指下降沿超过底值以下所呈
宽,顺时针旋转到底时比“脉宽粗调”挡高一挡。
电子测量与仪器(第3版) 2.5.3 脉冲信号发生器的使用
1. XC–15型脉冲信号发生器的使用方法
电子工业出版社
④ 调节“极性选择”旋钮可以改变脉冲信号发生器输出正、
负脉冲或正、负倒置脉冲中的一种。
⑤ 调节“偏移”旋钮可改变输出脉冲对地的参考电平,即
直流偏置。
电子工业出版社
1. XC–15型脉冲信号发生器的使用方法 ② 调节“延迟粗调”和“延迟细调”旋钮可实现延迟时间
在1µs~300ns范围内的连续调整。
顺时针旋转“延迟细调”,延迟时间增大;反之,减小。
顺时针旋转“延迟细调”到底时的延迟时间比“延迟粗调”
挡高一挡,逆时针旋转到底时为“延迟粗调”挡的延迟时
⑥ 调节“衰减”和“幅度”调节旋钮,可实现输出脉冲幅
度从150mV~5V的调整。
电子测量与仪器(第3版) 2.5.3 脉冲信号发生器的使用
电子工业出版社
2. 使用注意事项
① 不能空载使用,必须接入50Ω负载,并尽量避免入感
性或容性负载,以免引起波形畸变。
② 开机预热15min后,仪器方能正常工作。
1. 工作原理
(3)形成级 通常由单稳态触发器等电路组成,是脉冲信号发生器的中心 环节。
模电常用仪器使用实验报告

模电常用仪器使用实验报告
模电实验室主要使用的仪器有脉冲发生器、函数发生器、电子调节器、数字多用表、
电阻容箱、示波器、电流表等。
1、脉冲发生器:脉冲发生器主要用于发出正弦、方波、三角波或脉冲脉宽调制信号。
根据不同的用途,还具有可调普利兹调谐、比例调节等功能。
在放大电子级别的实验中,
脉冲发生器主要应用于测量输入灵敏度、输出幅度、频率范围和占空比等性能参数。
3、电子调节器:电子调节器是一种电子延时器,可以用来模拟电路中的时间延迟参数,它可以控制电路的时间早晚以及灵敏度。
主要应用于电路参数的检测、电路逻辑信号
的分析、时间间隔的测量等。
4、数字多用表:数字多用表用于测量电路的各种参数,如电压、电流、电阻、电容、频率等。
它具有多个单元,可以根据用户的要求量测各种测量参数。
5、电阻容箱:电阻容箱是由标准精度的电阻器组成的一个固定网络,可以用来调整
整个网络的电阻值,以搭建分压电源、电路调试等。
6、示波器:示波器是检测任意一个电子器件或电路输入输出信号变化特性的常用测
试仪器,可以显示复杂的波形,常用于测量电压和电流变化、放大器特性分析、稳定性等
方面。
7、电流表:电流表是一种用于测量电路电流大小的常用测试仪器。
它可以直接将被
测电流转换成指定单位(如A)的数字显示,以方便操作者以此读取电流交流或直流的大小。
西门子PLC脉冲输出
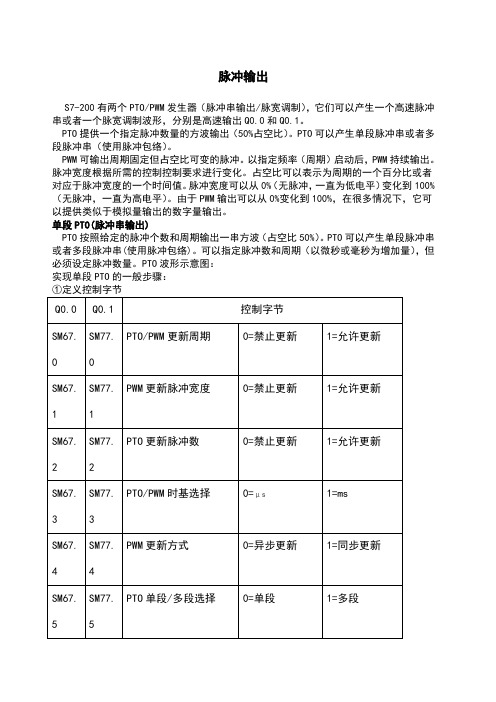
脉冲输出S7-200有两个PTO/PWM发生器(脉冲串输出/脉宽调制),它们可以产生一个高速脉冲串或者一个脉宽调制波形,分别是高速输出Q0.0和Q0.1。
PTO提供一个指定脉冲数量的方波输出(50%占空比)。
PTO可以产生单段脉冲串或者多段脉冲串(使用脉冲包络)。
PWM可输出周期固定但占空比可变的脉冲。
以指定频率(周期)启动后,PWM持续输出。
脉冲宽度根据所需的控制控制要求进行变化。
占空比可以表示为周期的一个百分比或者对应于脉冲宽度的一个时间值。
脉冲宽度可以从0%(无脉冲,一直为低电平)变化到100%(无脉冲,一直为高电平)。
由于PWM输出可以从0%变化到100%,在很多情况下,它可以提供类似于模拟量输出的数字量输出。
单段PTO(脉冲串输出)PTO按照给定的脉冲个数和周期输出一串方波(占空比50%)。
PTO可以产生单段脉冲串或者多段脉冲串(使用脉冲包络)。
可以指定脉冲数和周期(以微秒或毫秒为增加量),但必须设定脉冲数量。
PTO波形示意图:实现单段PTO的一般步骤:①定义控制字节Q0.0 Q0.1 控制字节SM67. 0 SM77.PTO/PWM更新周期0=禁止更新1=允许更新SM67. 1 SM77.1PWM更新脉冲宽度0=禁止更新1=允许更新SM67. 2 SM77.2PTO更新脉冲数0=禁止更新1=允许更新SM67. 3 SM77.3PTO/PWM时基选择0=μs1=msSM67. 4 SM77.4PWM更新方式0=异步更新1=同步更新SM67. 5 SM77.5PTO单段/多段选择0=单段1=多段SM67. 6 SM77.6PTO/PWM选择0=PTO 1=PWMSM67. 7 SM77.7PTO和PWM禁止/允许0=禁止1=允许②设置脉冲周期Q0.0 Q0.1SMW68 SMW78 单段PTO/PWM周期时间范围:2~65535③设定脉冲数量Q0.0 Q0.1SMD72 SMD82④激活端口指定哪一路脉冲输出,则需要在程序中激活相对应的端口,才能使脉冲串发送。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
江西理工大学应用科学学院信息工程系课程设计说明书课程名称:电子线路课程设计课题名称:数控脉宽脉冲发生器参与人员姓名:杨玲班级、学号电信103,02号参与人员姓名:万淑萍班级、学号电信103,20号参与人员姓名:张晓琴班级、学号电信103,27号参与人员姓名:刘潞瑶班级、学号电信103,30号完成时间: 2013年01月10日指导老师:梁小鹏目录一摘要 (1)二设计内容及指标 (2)三设计条件 (2)四设计分析 (4)五总体电路图 (10)六心得体会 (11)七参考文献 (13)八附件 (14)一摘要:单片机集成度高、功能强、可靠性高、体积小、功耗低、使用方便、价格低廉等一系列优点,目前已经渗入到人们工作和生活的方方面面,几乎无处不在、无所不为。
单片机的应用领域已经从面向工业控制、通讯、交通、智能仪表等迅速发展到家用消费产品、办公自动化、汽车电子、PC机外围一记网络通讯等广大领域。
单片机有两种基本结构形式:一种是在通用微型计算机中广泛采用的,将程序存储器和数据存储器合用一个存储器空间的结构,成为普林斯机构。
另一种是将程序存储器个数据存储器截然分开、分别寻址的结构,一般需要较大的程序存储器,目前单片机以采用程序存储器截然分开的结构多。
本课题讨论的占空比可调的信号发生器的核心是目前应用极为广泛的51系列单片机。
基于单片机的信号发生器的设计,该课题的设计目的是充分运用大学期间所学的专业知识,考察现在正在使用的信号发生器的基本功能,完成一个基本的实际系统的设计全过程。
关键是这个实际系统设计的过程,在整个过程中我可以充分发挥自动化的专业知识。
特别是这个信号发生器的设计中涉及到一个典型的控制过程。
通过单片机控制一个有特殊功能的信号发生芯片,可以产生一系列有规律的幅度和频率可调的波形。
这样一个信号发生器装置在控制领域有相当广泛的应用范围。
因为产生一系列的可调波形可以作为其他一些设备的数值输入,还可以应用与设备检测,仪器调试等场合。
高频稳定的波形信号也可以用于无线电波的调频,解调。
这些都是现代生活中必不可少的一些应用二设计内容及指标:1. 设计一个可通过加/减控制键调整脉宽占空比的矩形脉冲信号发生器。
2. 脉宽占空比δ调整范围为1%~98%。
3. 控制键分别设为“+”、“-”键,可分别加/减脉宽占空比,可控步长为1%。
4. 具有2位占空比的数字显示。
5. 输出信号的频率范围为1Hz~20kHz。
三设计条件:3.1课题任务(系统整体功能要求):数控脉宽脉冲信号发生器能够在脉宽控制键的控制下,按确定的步长改变,输出脉冲信号占空比,即使脉冲宽度可调,同时以占空比的形式显示脉宽情况。
3.2 系统结构要求:数控脉宽脉冲信号发生器的系统结构框图如图1 所示,其中输入脉冲由外部信号源提供,脉冲宽度控制键用以选择输出信号的脉冲宽度,脉宽变换电路根据脉宽控制键产生要求的脉宽信号,占空比显示电路可显示输出信号f0 的占空比。
3.3 使用的元器件表3.1 3.4 设计提示图3.1四:设计分析1、时钟电路图4.1作用:晶振的作用是为系统提供基本的时钟信号。
通常一个系统共用一个晶振,便于各部分保持同步。
有些通讯系统的基频和射频使用不同的晶振,而通过电子调整频率的方法保持同步。
2、复位电路图4.2作用:计算机在启动运行时都需要复位,复位是使中央处理器CPU和内部其他部件处于一个确定的初始状态。
3、按键控制图4.3作用:加/减控制键调整脉宽占空比。
4、数码管显示图4.4 作用:显示占空比。
5、单片机最小系统图4.5单片机的最小系统是由组成单片机系统必需的一些元件构成的,除了单片机之外,还需要包括电源供电电路、时钟电路、复位电路。
单片机最小系统电路(单片机电源和地没有标出)。
单片机最小系统1、时钟电路单片机工作时,从取指令到译码再进行微操作,必须在时钟信号控制下才能有序地进行,时钟电路就是为单片机工作提供基本时钟的。
单片机的时钟信号通常有两种产生方式:内部时钟方式和外部时钟方式。
内部时钟方式的原理电路如图所示。
在单片机XTAL1和XTAL2引脚上跨接上一个晶振和两个稳频电容,可以与单片机片内的电路构成一个稳定的自激振荡器。
晶振的取值范围一般为0~24MHz,常用的晶振频率有6MHz、12 MHz、11.0592 MHz、24 MHz等。
一些新型的单片机还可以选择更高的频率。
外接电容的作用是对振荡器进行频率微调,使振荡信号频率与晶振频率一致,同时起到稳定频率的作用,一般选用20~30pF的瓷片电容。
外部时钟方式则是在单片机XTAL1引脚上外接一个稳定的时钟信号源,它一般适用于多片单片机同时工作的情况,使用同一时钟信号可以保证单片机的工作同步。
时序是单片机在执行指令时CPU发出的控制信号在时间上的先后顺序。
AT89C51单片机的时序概念有4个,可用定时单位来说明,包括振荡周期、时钟周期、机器周期和指令周期。
振荡周期:是片内振荡电路或片外为单片机提供的脉冲信号的周期。
时序中1个振荡周期定义为1个节拍,用P表示。
时钟周期:振荡脉冲送入内部时钟电路,由时钟电路对其二分频后输出的时钟脉冲周期称为时钟周期。
时钟周期为振荡周期的2倍。
时序中1个时钟周期定义为1个状态,用S表示。
每个状态包括2个节拍,用P1、P2表示。
机器周期:机器周期是单片机完成一个基本操作所需要的时间。
一条指令的执行需要一个或几个机器周期。
一个机器周期固定的由6个状态S1~S6组成。
指令周期:执行一条指令所需要的时间称为指令周期。
一般用指令执行所需机器周期数表示。
AT89C51单片机多数指令的执行需要1个或2个机器周期,只有乘除两条指令的执行需要4个机器周期。
了解了以上几个时序的概念后,我们就可以很快的计算出执行一条指令所需要的时间。
例如:若单片机使用12MHz的晶振频率,则振荡周期=1/(12MHz)=1/12us,时钟周期=1/6us,机器周期=1us,执行一条单周期指令只需要1us,执行一条双周期指令则需要2us。
2、复位电路无论是在单片机刚开始接上电源时,还是运行过程中发生故障都需要复位。
复位电路用于将单片机内部各电路的状态恢复到一个确定的初始值,并从这个状态开始工作。
单片机的复位条件:必须使其RST引脚上持续出现两个(或以上)机器周期的高电平。
单片机的复位形式:上电复位、按键复位。
五.总体电路图5.1 六.心得体会1.总结:本设计完成题目所给的设计任务,设计了一台数控脉宽脉冲信号发生器,满足题目的基本要求和一部分扩展功能。
信号发生器有性能可靠、精度高、电路简单的特点。
缺点还是存在的,总体来说,本设计是成功的。
在硬件实现之前,我先用仿真软件对电路进行仿真,仿真过程中,由于软件的某些原因有时会出现仿真不到正确结果,在仿真上面花费了很久的时间。
而在硬件中并不存在该类错误。
通过此次经历警告自己,电路设计时,不能一味的依赖仿真,仿真只是辅助,电路的设计还是要硬件实现来发现问题,查找问题,解决问题。
2.收获与体会回顾起此次课程设计,至今我感慨颇多。
的确,从查阅资料到电路设计,从理论学习到实践总结,在整整两个星期的日子里,可以说是苦多于甜,但是能学到好多东西,不仅可以巩固所学过的数电模电专业知识,而且学到了仿真软件的基本操作。
通过这次课程设计,我懂得了理论与实践相结合的重要的,仅有理论的知识是远远不够的,只有把所学到的专业知识与实践结合起来,从实践中得出结论,才能真正的理解掌握理论知识,提高自己的实际动手能力和独立思考能力。
在设计的过程中难免会遇到各种各样的问题,但是我们迎难而上,通过查资料和请教老师努力研究、解决问题;同时在分析测容原理与设计的过程中发现自己的不足之处,如对以前学过的专业知识理解的不够深刻,掌握的不够牢固,我们通过认真学习和掌握专业知识可以更好的完成课程设计。
我们组四人依据分工,高效率的查询了大量资料,电路图是我们依据原理自行设计,然而结果却与理论上有不少出处,随着今后的学习我们也会继续将之改进。
此次课程设计不仅进一步巩固了我们是对电子技术知识的学习也锻炼了我们的团队合作能力。
七.参考文献1.林涛. 数字电子技术.清华大学出版社.20062.高吉祥.电子技术基础实验与课程设计.电子工业出版社.20023.陈明义.电子技术课程设计实用教程.中南大学出版社.20024.崔瑞雪.电子技术动手实践.北京航空航天大学出版社.2007八.附件#include <reg51.h>#define uchar unsigned char#define uint unsigned intfloat fosc=12000000; //系统时钟频率sbit key1=P1^0; //控制频率的增加sbit key2=P1^1; //控制频率的减少sbit key3=P1^2; //控制占空比的增加sbit key4=P1^3; //控制占空比的减少sbit clk=P1^4;uint zkb=50; //占空比初值,取值范围为1到99uint fre=50; //频率初值,取值范围为1到20000 uint time0_H,time0_L,time1_H,time1_L;uint zkb_shi,zkb_ge;uchar table[]={0x3F,0x06,0x5B,0x4F,0x66,0x6D,0x7D,0x07,0x7F,0x6F};void delayms(uint z){uint i,j;for(i=z;i--;i>0)for(j=110;j--;j>0);}void init(){TMOD=0x11; //定时器0和1都工作在方式1time0_H=0xB1;time0_L=0xE0;time1_H=0xD8;time1_L=0xF0;TH0=0xB1; //定时器0装入初值,计数器计数20000次,20ms TL0=0xE0;TH1=0xD8; //定时器1装入初值,计数器计数10000次,10ms TL1=0xF0;IT0=1; //外部中断0为边沿触发EX0=1; //开外部中断0ET0=1; //定时器T0中断允许ET1=1; //定时器T1中断允许EA=1; //开启总中断TR0=1; //开启定时器0TR1=1; //开启定时器1P0=0x3F; //数码管初始化显示占空比为50%P2=0x6D;}void main(){init();while(1);}void T0_time() interrupt 1{TR1=1; //开定时器1TH0=time0_H;TL0=time0_L;clk=1;}void T1_time() interrupt 3{TR1=0; //关定时器1TH1=time1_H;TL1=time1_L;clk=0;}void keyscan() interrupt 0 //外部中断0 {float TX,TZ;EX0=0; //关中断delayms(10); //延时消抖if(P1!=0x0F)if(key1==0){fre=fre+10;if(fre>20000)fre=1;}if(key2==0){fre=fre-10;if(fre<1)fre=20000;}if(key3==0){zkb=zkb+1;if(zkb>99)zkb=1;}if(key4==0){zkb=zkb-1;if(zkb<1)zkb=99;}zkb_shi=zkb/10; //占空比数码显示zkb_ge=zkb%10;P2=table[zkb_shi];P0=table[zkb_ge];TX=(65536-fosc/(12.0*fre));TZ=(65536-(fosc*zkb))/(12.0*100*fre);time0_H=(uint)TX/256;time0_L=(uint)TX%6;time1_H=(uint)TZ/256;time1_L=(uint)TZ%6;P1=0x0f;EX0=1;TR0=1;TR1=1;}。