电动汽车方向盘绝对角位置传感器的研究
基于MC9S08DZ60汽车方向盘转角传感器的开发

s e n s o r ’ S me c h a n i c a l s t r u c t u r e , t h e d e s i g n o f h a r d w a r e c i r c u i t a n d s o f t w a r e p r o g r a m. T h e z e r o s e t t i n g me t h o d o f t h e a n g l e s e n s o r a n d c a l c u l a t i o n me t h o d o f t h e a b s o l u t e a n g l e o f t h e s t e e r i n g w h e e l we r e p r e s e n t e d . C o mp a r i n g wi t h t h e a n g l e s e n s o r p r o d u c e d b y B o s c h ,t h e t e s t r e s u l t s h o ws t h e s e n s o r c a n a c c u r a t e l y me a s u r e t h e r o t a t i o n a n g l e o f t h e s t e e r i n g wh e e l , a n d c a n p r o v i d e a c c u r a t e s t e e r i n g wh e e l p o s i t i o n s i g n a l f o r t h e EP S s y s t e m a n d t h e E S P s y s t e m. Ke y wo r d s :a n g l e s e n s o r ; ML X9 0 3 6 0 ; a b s o l u t e a n g l e ; c o mp a r i s o n t e s t
汽车ESP常用传感器其接口原理论文
浅谈汽车ESP常用传感器及其接口原理0.引言汽车esp是汽车电控的一个标志性发明。
是在传统的汽车动力学控制系统的基础上增加一个横向稳定控制器,通过控制横向和纵向力的分布和幅度,以便控制任何路况下汽车的动力学运动模式,能在各种工况下提高汽车的动力性能,如制动、滑移、驱动等。
其电子部件主要包括电子控制单元(ecu)、方向盘传感器、纵向加速度传感器、横向加速度传感器、横摆角速度传感器、轮速传感器等。
作为保证行车安全的一个重要电控系统,其各个传感器的正常工作是进行有效控制的基础。
1.esp常用传感器介绍1.1方向盘转角传感器esp通过计算方向盘转角的大小和转角变化速率来识别驾驶员的操作意图。
方向盘转角传感器将方向盘转角转换为一个可以代表驾驶员期望的行驶方向的信号,方向盘转角一般是根据光电编码来确定的,安装在转向柱上的编码盘上包含了经过编码的转动方向、转角等信息。
这一编码盘上的信息由接近式光电耦合器进行扫描。
接通点火开关并且方向盘转角传感器转过一定角度后,处理器可以通过脉冲序列来确定当前的方向盘绝对转角。
方向盘转角传感器与ecu的通讯一般通过can总线完成。
1.2横摆角速度传感器横摆角速度传感器检测汽车沿垂直轴的偏转,该偏转的大小代表汽车的稳定程度。
如果偏转角速度达到一个阈值,说明汽车发生测滑或者甩尾的危险工况,则触发esp控制。
当车绕垂直方向轴线偏转时,传感器内的微音叉的振动平面发生变化,通过输出信号的变化计算横摆角速度。
1.3纵向/横向加速度传感器esp中的加速度传感器有沿汽车前进方向的纵向加速度传感器和垂直于前进方向的横向加速度传感器,基本原理相同,只是成90°夹角安装。
esp一般使用微机械式加速度传感器,在传感器内部,一小片致密物质连接在一个可以移动的悬臂上,可以反映出汽车的纵向/横向加速度的大小,其输出在静态时为2.5v左右,正的加速度对应正的电压变化,负的加速度对应负的电压变化,每1.0~1.4v对应1g的加速度变化,具体参数因传感器不同而有所不同。
方向盘转角传感器研究进展

1 1 绝 对值 转 角传 感 器 . 绝对值转角传感器输 出方 向盘 的绝 对转 动角度 , 能够 直接为 E P的 E U所使用 。但是 , S C 这种传感器对于安装空
汽 车 动 力 学 稳 定 性 控 制 ( l t ncs blyporm, e cr i t it rga e o a i
A s a t t r gw el n l sn o i a mp r n at ss m,t b t c :Se i h e a ge e s r s n i o a tp r o e ee r i s it rga E P) yt i r en t t c o c a i e s
应 、 阻效应 、 磁 电阻分压效应等 。根据原始 信号 编/ 解码方式 的不同 , 转角传感器可 以分为绝对值转 角传感
器和相对值转角传感器 。 目前 , 出现 了一些新 型 的方向盘转 角传感 器 , , MR, MR方 向盘转角 传感 又 如 A G 器等 , 介绍 了这些新型传感器 的一些性能参数 。 关键词 :方 向盘转角传感 器;汽车动力学控制 ;稳定性控制 ;角度 中图 分 类 号 :T 2 ; 2 P7 U 7 文 献 标 识 码 :A 文 章 编 号 :10 -9 8 (0 7 1 -00 - 4 00 7 7 2 0 ) 1 0 1 0
a c a y a urbii o c r h aey o iv r c urc nd d a lt c n e n t e s f t fdr e .Co v n in la ge s s r s n s v r lprn i e s c s y n e to a n l en o sba e o e e a i cpls, u h a p o o l ere t Hal maa tr ssie a d p t nildii i g e e t . c dig t he e c dig e o i g m eh d h t ee tiiy, l, gm o e itv n o e ta v d n f cs Ac or n o t n o n /d c d n t o s o h rg n lsg l te s n o s an be dii d it bs l e a d r ltv te i g s n o s ft e o i a ina ,h e s r c vde n o a out n ea ie se rn e s r .At p e e t t r r i r s n hee a e
简述方向盘转角传感器工作原理
简述方向盘转角传感器工作原理
方向盘转角传感器是汽车行驶中的重要部件,它能检测汽车的行驶方向,从而可以精确控制汽车的行驶轨迹。
方向盘转角传感器工作原理可以用几个简单的步骤来总结。
首先,方向盘转角传感器由三个重要部件组成:一个激光器,一个汽车方向传感器,以及一个反射板。
激光器产生的激光光束照射到反射板上,反射板反射光谱被传感器探测,探测到的信号在传输给汽车电脑,电脑收集信号并据此控制汽车的转角方向。
其次,当司机调整方向盘的转角时,激光器会照射到反射板上,反射板会反射出不同的反射光谱,而传感器可以检测到不同的反射光谱,并将信号传输到汽车电脑,电脑分析信号,根据信号控制汽车的转角方向。
此外,方向盘转角传感器还与其它车内系统相结合,比如发动机控制系统等,当汽车经过一定转角时,传感器可以检测到汽车的转角,并告知发动机控制系统,发动机控制系统会根据信号调整发动机的转速,从而达到车辆安全行驶的目的。
最后,司机可以使用子系统精确控制汽车的行驶方向。
汽车电脑系统可以收集到传感器发送的信号,根据信号控制汽车在行驶中的转向方向,从而提高汽车的行驶精度,实现更加安全精准的行驶。
由此可见,方向盘转角传感器在汽车行驶中起着重要的作用,它能够准确测量汽车的转向方向,从而提高汽车的行驶精度,实现更加安全可靠的行驶。
它通过与发动机控制系统结合,调整汽车行驶方向,
这是一个很重要的系统,它能够为汽车的安全行驶做出重要的贡献。
方向盘转角传感器误差成因与补偿的研究

0 引 言
霍尔式 工作 原理 如图 2所示 , 4个霍 尔感应 元件 绕外界 磁 场 中心 间隔 9 0 。 均匀分布 , 其中 1 、 2为一组 Y , 3 、 4为另一组 。
0霍尔感应 元件 一 一 >外界磁场方 向
n外界磁场角度
0
随着 汽车 电子控制系统 的发展 , 人们对 汽车 的安全性 与舒 适性 要求 不断提高 , 其 中电子稳定 系统 、 四轮 转 向、 自动 泊车辅 助 系统等基于方 向盘转 动角度 或驾 驶员 意 图的控制 系统 得 到 了广泛应 用。方 向盘转角传感器作 为这些 系统 中的关键技 术 , 其 角度精度要求越来越高 。
c o mp e n s a t i o n me t h o ds f r o m t he oi p n t v i e ws o f ma g n e t i f e l d d i s t r i b u t i o n, me c ha n i c a l s t r u c t u r e a n d a s s e mb l y, i mp ov r e d he t ng a l e a c c u r a c y
摘要 : 通过对磁感应式 角度传 感器的工作 原理研究 , 从 磁场分 布特性 、 结 构与装 配 3方 面提 出方 向盘转 角传 感 器角 度误 差补偿 方法 , 在 无额 外硬件 成本投 入情况下提 高方 向盘转 角传感 器角度精 度。在 L a b V I E W 软件 平 台上 开发 试验 台 架对补偿 方法进行验证 , 使 用该补偿 方法后 , 方向盘转角传感器角度误差 降到 . 4 - 0 . 3 。 范围 内。 关键 词 : 磁感应 ; 磁 场分布 ; 方向盘 转角传感器 ; 角度精度 ; 角度误差 ; 误差补偿
电动汽车方向盘绝对角位置传感器的研究

传感器与微系统(T ransducer and M i c rosyste m T echno l og i es) 2011年第30卷第3期电动汽车方向盘绝对角位置传感器的研究李 浩,徐衍亮(山东大学电气工程学院,山东济南250061)摘 要:方向盘 720绝对角位置的测量是轮式驱动电动汽车转矩协调控制解决方案的关键之一。
通过16位处理器dsP IC30F6010A与两片TLE5012通信,设计了一种基于i G M R的 720绝对角位置非接触式传感器,并可通过外部中断设置方向盘的回正零点。
给出了该传感器的具体实现方案,包括2个从动齿轮的齿数设计,绝对角位置的计算方法;并对单SP I接口通信在调试时存在的问题,给出了解决办法;最后试制了样机,进行了实际转角检测,并对实验结果进行了误差分析。
实验证明:该传感器能达到方向盘720绝对角位置的测量要求,为轮式驱动电动汽车转矩协调控制打下了基础。
关键词:转矩协调控制;电动汽车;角度传感器;i GMR中图分类号:U463;TP231 文献标识码:B 文章编号:1000!9787(2011)03!0032!03Study on the steering wheel angle sensor usedfor electric vehicleLI H ao,XU Y an liang(School of E lectr ica l Engineeri n g,Shandon g Un iversity,Ji nan250061,Ch ina)Abstract:T he detection o f stee ri ng angular pos i tion range is 720,is one o f t he key part of soluti on to torquecoo rdina ti ng contro l o f i n w hee l m otor driven e l ec tric veh icle(EV).A nove l senso r structure based ondsP I C30F6010A co mmunicati ng w ith t w o TLE5012is adopted.A 720abso l u te angu l ar positi on contactlesssenso r based on i G M R i s desi gned,and zero po int can be set t h rough ex terna l i nte rrupti on.T he i m ple m entati ons o fthe senso r is g iven,i nclud i ng t he design of t w o gears,ca lcu l a ti on m et hod o f abso l ute angu lar po siti on,and som edebugg i ng prob l ems are a l so d iscussed i n de tai.l The error ana l ysis o f experi m enta l resu lts is presented.The resultproofs tha t th i s sensor can mee t t he de m ands o f 720abso l ute angular pos ition detec ti on,laying the f oundati onfor to rque coord i nati ng con tro l of in whee lm otor driven EV.K ey word s:torque coo rd i nati ng contro;l e lectr i c vehicle(E V);ang l e sensor;i G M R0 引 言随着能源危机和环境污染的加剧,电动汽车日益受到关注。
方向盘转角传感器

数据处理技术: 通过采用先进 的数据处理技 术,提高传感 器的数据处理
能力。
02
• 数字信号处理技术 • 人工智能算法
拓展应用领域,实现多种传感器的融合
拓展应用领域:通过开发新型传感器和应用技术, 拓展传感器在更多领域的应用。
• 新型传感器开发 • 应用技术开发
多种传感器的融合:通过将方向盘转角 传感器与其他传感器融合,实现多种传
CREATE TOGETHER
DOCS
划。
02
• GPS导航系统 • 惯性导航系统
船舶行业的应用
船舶定位系统:通过测量舵轮旋转角度,辅助船舶定位和导航。
• GPS定位系统 • 惯性导航系统
船舶转向控制系统:通过测量舵轮旋转角度,实现船舶的精确转向。
• 船舶自动驾驶系统 • 船舶航向控制系统
航空航天行业的应用
飞行器控制系统:通过测量操纵杆旋转角度,实现 飞行器的精确控制。
• 飞行控制系统 • 导航系统
模拟器:通过测量操纵杆旋转角度,模 拟飞行器的飞行状态。
• 飞行模拟器 • 航天模拟器
04
方向盘转角传感器的发展趋势
提高传感器的测量精度和稳定性
提高测量精度:通过优化传感器结构和采用新型测 量原理,提高传感器的测量精度。
提高稳定性:通过改进传感器制造工艺 和提高材料性能,提高传感器的稳定性。
02
• 模拟驾驶过程 • 测量输出信号
方向盘转角传感器的标定设备和方法
标定设备:用于模拟方向盘的旋转角度,并提供标 准角度信号的装置。
• 方向盘旋转模拟器 • 角度信号发生器
标定方法:通过将传感器的输出信号与 标准角度信号进行比较,确定传感器的
性能参数。
方向盘转向角传感器的数据采

方向盘转向角传感器的数据采
自适应前照明系统(AFS),是一种能适应各种不同环境条件的智能前照灯系统,获得汽车在转弯处的参数,如:转向角,角速度以及转向,是汽车前向灯自适应控制的前提条件。
为了获得这些参数,采用了方向盘转向角传感器,它能测试出方向盘的转向角,转向角速度以及转向三个参数,这几个参数在一定程度上能反映汽车在转弯处的行驶状态,准确地获取这些参数具有重要意义。
因而设计了基于ARM的数据采集系统。
在这个采集系统中方向盘转向角传感器采集到的数据通过CAN总线传送到ARM中,并对其进行相应数据处理。
1 方向盘转向角传感器数据采集系统的结构框图
方向盘转向角传感器数据采集系统包括转向角传感器,CAN总线和ARM微控制器三个部分。
方向盘转向角传感器是通过CAN总线的方式传送采集到的信号,控制器采用的是ARM微处理器,系统具体的结构框图如图1所示。
方向盘转角传感器研究进展

2007年第26卷第11期 传感器与微系统(Transducer and M icr osyste m Technol ogies)综述与评论方向盘转角传感器研究进展3杨 财,周艳霞(清华大学汽车工程系,北京100084)摘 要:方向盘转角传感器是汽车动力学稳定性控制(electr onic stability p r ogra m,ESP)系统的重要组成部分,其精度和稳定性直接关系着行车安全。
传统的方向盘转角传感器基于多种原理,如,光电效应、霍尔效应、磁阻效应、电阻分压效应等。
根据原始信号编/解码方式的不同,转角传感器可以分为绝对值转角传感器和相对值转角传感器。
目前,又出现了一些新型的方向盘转角传感器,如,AMR,G MR方向盘转角传感器等,介绍了这些新型传感器的一些性能参数。
关键词:方向盘转角传感器;汽车动力学控制;稳定性控制;角度中图分类号:TP27;U27 文献标识码:A 文章编号:1000-9787(2007)11-0001-04Research developm en t of steer i n g wheel angle sen sor3Y ANG Cai,Z HOU Yan2xia(D epart m en t of Auto m ob ile Eng i n eer i n g,Tsi n ghua Un i versity,Be iji n g100084,Ch i n a)Abstract:Steering wheel angle sens or is an i m portant part of the electr onic stability p r ogra m(ESP)syste m,its accuracy and durability concern the safety of driver.Conventi onal angle sens ors base on several p rinci p les,such as phot oelectricity,Hall,magnet oresistive and potential dividing effects.According t o the encoding/decoding methods of the original signal,the sens ors can be divided int o abs olute and relative steering sens ors.A t p resent there are s ome ne w2designed sens ors,such as AMR,G MR steering wheel sens or.The para meters of these sens ors are given.Key words:steering wheel angle sens or;vehicle dyna m ics contr ol;electr onic stability p r ogra m(ESP);angle0 引 言汽车动力学稳定性控制(electr onic stability p r ogra m, ESP)系统是汽车主动安全发展史上的一个重要进展,它是继汽车安全带之后,汽车安全技术上的又一次创新[1]。
基于KMZ60的EPS转角传感器设计
基于KMZ60的EPS转角传感器设计摘要方向盘转角信号是电动助力转向系统和车身电子稳定系统的重要输入量。
本文借鉴国内外成熟的方向盘转角测量方案,解释了游标法测量方向盘绝对转角的方法,设计以磁阻式磁场角度传感器KMZ60与MC9S08DZ60单片机为核心的硬件电路和相应的信号处理方式,开发成本低廉、能够实现多圈测量的非接触式转角传感器。
通过专用的测试平台对转角传感器进行标定,验证转角传感器能够基本满足电控系统的精度需求。
关键词转角测量;转角传感器;游标法;KMZ600 引言为了使汽车更加节能、安全、环保,越来越多的汽车开始装配电动助力转向系统(EPS)和车身电子稳定系统(ESP)。
传统的有刷电机EPS只装配转矩传感器,转向盘转速信号主要依靠估算的方法获得。
但这种方法的误差较大,限制了EPS 性能的进一步提高。
将方向盘转角传感器引入EPS,能够有效提升EPS的回正和摩擦补偿性能,改善汽车的操作稳定性。
此外,ESP等底盘电控系统需要从EPS共享转角信号,实现各自的控制功能,从而实现底盘一体化控制。
经过多年的研究和发展,方向盘转角传感器从最初的电位计式、单圈测量的传统角度传感器,发展到能够非接触式、多圈测量的智能传感器。
以博世公司LSW3为代表的游标法转角测量方案是一种比较理想的多圈测量方案,因而被多家公司应用于各自的转角传感器中。
国内高校在其基础上做过多种仿制和改进,且大多采用集成CORDIC模块的角度测量芯片,该类型芯片通常成本较高,因而难以控制转角传感器的成本。
本文借鉴LSW3的机械结构,自行开发传感器的硬件电路,设计信号的软件处理流程,研发了一款结构简单、价格低廉、精度适中、能够实现多圈测量的方向盘转角传感器。
1 测量原理通常轿车方向盘的机械行程为3圈,即1080°左右。
通用的磁场角度传感器包含各向异性磁阻型(AMR)、巨磁阻型(GMR)以及霍尔型(Hall)等类型,三者的量程通常是180°(AMR型)和360°(GMR型、Hall型),因此,转角传感器的核心在于扩展传感器量程,采用小量程的磁场角度传感器实现多圈测量。
方向盘电动控制转向原理
方向盘电动控制转向是一种现代汽车上常见的转向方式,它通过电机驱动方向盘进行转向。
其基本原理可以分为以下几个步骤:
方向盘角度传感器检测:方向盘电动控制转向系统首先需要检测方向盘的角度变化。
为此,系统会使用一种称为方向盘角度传感器的设备,它会检测方向盘的旋转角度,并将这些信息传递给控制系统。
控制器处理信号:控制器会将接收到的方向盘角度信息与其他传感器获取到的车辆信息(例如车速、转向半径等)进行综合分析,并计算出合适的转向角度和转速。
电机驱动方向盘:当控制器计算出转向角度和转速后,会将这些信息传递给电机,电机根据这些信号驱动方向盘进行转向。
反馈机制:为了保证方向盘的准确性和稳定性,系统还会安装一种称为转向力矩传感器的设备,用于检测转向力矩的大小和方向,并将这些信息反馈给控制器。
控制器会根据反馈信息对转向角度和转速进行微调,以确保方向盘的转向能够精确、平稳地进行。
总的来说,方向盘电动控制转向系统通过电子设备实现了转向角度和转速的精确控制,相比传统的机械转向方式更为灵活和精准。
方向盘转角仪检测装置的研制及转向角不确定度分析
4关键技术 的科学性 , 先进 性和创新 性
该 项 目的特 点 是 电路 设 计采 用 模块 化 设 计便 于 日后 的维 护 、 维 修 ; 机 械 结构 的特 点 是 简 单 轻 便 、 体 积 小 便 于 现 场 安 装 和 校 准 ,在 设 计 上 尽量 减 少连 接 件 ,避 免 因为连 接 件 影 响 精度 。总 质 量不 超2 公斤 。国 内 目前 没有 这 样质 量和 体积 的设备 。 5 5测 量 结 果 的 不 确 定 度 评 定
用户 送检 的 麻烦
在模 拟 器 处 于非 操 作状 态 时 ,系 统检 测 回 中检 测 电路 ,若 方 向盘 处 于 回中 状态 ,而 计数 电路 的 数据 输 出不是 2 4 ,可 对 计数 电路 08
进行 复位 ,并 重 新设 置初 值 。
在 机 械 部件 的 选用 上 , 考虑 到 下场 便 于 携 带体 积 质 量 小 ,我
2 4 J LNARCLUE 9 II GIUTR
数量 等 。
第 三 ,确定 家 具 的制 造 工 艺 。根 据家 具 零 部件 图详细 地 制 定 整 个家 具 中各个 零 件 的 生产 工 艺 过程 ,包 括机 械 加 工 部分 和 手 工 操 作部 分 。确 定涂 饰 方法 以及 涂 饰 生产 工 艺过 程 ,包括 在 涂 饰 过 程 中使用 的染料 ,颜 色 ,辅 料 以及各 种涂 料 。 2 2 实践 过 程 实施 . 实践 过 程 实施 着 重 强调 实 践过 程 中 的工 作 步骤 ,加 工设 备 的 使 用情 况 以及 工 具 、夹 具 、模 具 和 刃具 的 使用 情 况 ,注 重 其 合 理 利 用和 合 理 操 作 。安 全 是 整个 实 践 过程 中非 常 重要 的环 节 ,因 此 设 备 的 安全 操 作规 程 和注 意事 项 必 须在 实 践前 认 真 学 习 ,在 示 范 教 学 中 也必 须 认 真听 取 教 师强 调 操 作 安全 的注 意事 项 ,在 具 体 实 践 中 必须 牢 记 各个 设 备 以及 各 个 装 置等 安 全规 程 ,避 免 出现 实 践 事故。 2 3 实践 过 程 检 查 . 实践 过 程 检 查是 整个 实践 过程 中非 常重 要 的~ 环 , 学生 通 过 实 践 学 会 了一 些 在课 堂 上 无法 学 到 的 知识 ,但 是如 果 不 检查 、不 总 结 就 不能 面 对 不 同 的产 品和 不 同 的零 件 做 到触 类 旁 通 的 目的 。 经 过 实 践后 会 发 现 实 际过 程和 设 计 计 划 出现 了 偏差 ,需 要在 实 践 中调 整 ,如 实 践 中修 改 设 计 的原 因 , 实践 中修 改设 计 的 结果 ,实 践 中 需 要 补 充 哪 些 技 术 文 件 , 实 践 中 工 艺 流 程 调整 的 原 因 和 理 由 ,实 践 中发 现 学 习 中存 在哪 些 问题 ,实 践 结 束后 不 明 白的 问题 等。
转向角传感器的工作原理
转向角传感器,也称为转角传感器或方向盘位置传感器,是一种用于检测车辆在行驶过程中方向盘转动角度和方向的重要电子装置。
其工作原理通常基于光电、磁感应或电位计等技术实现:
1. 光电式转向角传感器:
- 这种传感器利用光电耦合元件(包括发光二极管和光敏晶体管)以及带孔槽板结构来工作。
- 当方向盘转动时,槽板随之转动,使得槽板上的小孔与光电耦合元件相对位置发生变化。
- 通过光电效应,穿过开孔的光线会照射到光敏晶体管上,产生变化的光照强度,进而转换成数字脉冲信号。
- 根据输出的脉冲序列,汽车电子控制单元(ECU)可以精确计算出方向盘的角度及旋转速度。
2. 磁感应式转向角传感器:
- 使用霍尔效应或磁阻效应的传感器元件,通常与安装在转向柱内部的永磁体配合使用。
- 当方向盘转动时,磁铁也随之转动,导致传感器附近的磁场发生改变。
- 磁场的变化会被霍尔元件或磁阻元件转化为电信号,从而反映出方向盘的位置信息。
3. 电位计式转向角传感器:
- 采用电阻分压原理,通过机械接触的方式测量电阻值的变化。
- 转向轴连接一个带有多个触点或可变电阻的电位器。
- 随着方向盘转动,电位器的电阻值会发生变化,由此产生的电压变化反映了转向角度。
无论哪种类型的转向角传感器,它们都是为了实时监测并反馈方向盘的状态给车辆控制系统,确保安全驾驶辅助系统(如ESP、ABS等)以及其他与转向相关的功能能够准确响应驾驶员的操作意图。
光电式方向盘转角传感器的工作原理

光电式方向盘转角传感器的工作原理下载提示:该文档是本店铺精心编制而成的,希望大家下载后,能够帮助大家解决实际问题。
文档下载后可定制修改,请根据实际需要进行调整和使用,谢谢!本店铺为大家提供各种类型的实用资料,如教育随笔、日记赏析、句子摘抄、古诗大全、经典美文、话题作文、工作总结、词语解析、文案摘录、其他资料等等,想了解不同资料格式和写法,敬请关注!Download tips: This document is carefully compiled by this editor. I hope that after you download it, it can help you solve practical problems. The document can be customized and modified after downloading, please adjust and use it according to actual needs, thank you! In addition, this shop provides you with various types of practical materials, such as educational essays, diary appreciation, sentence excerpts, ancient poems, classic articles, topic composition, work summary, word parsing, copy excerpts, other materials and so on, want to know different data formats and writing methods, please pay attention!随着汽车科技的不断进步,各种新型传感器被广泛应用于汽车电子控制系统中,其中光电式方向盘转角传感器就是其中之一。
传感器技术在智能电动汽车中的应用研究
传感器技术在智能电动汽车中的应用研究在当今科技飞速发展的时代,智能电动汽车逐渐成为了汽车行业的主流趋势。
传感器技术作为智能电动汽车的关键组成部分,发挥着至关重要的作用。
它就像是智能电动汽车的“眼睛”和“耳朵”,能够实时感知车辆周围的环境和自身的状态,为车辆的安全、高效运行提供了有力的保障。
智能电动汽车中的传感器种类繁多,包括但不限于激光雷达、毫米波雷达、摄像头、超声波传感器、惯性测量单元(IMU)、GPS 传感器等。
这些传感器各自具有独特的工作原理和优势,相互配合,为车辆提供了全面、准确的信息。
激光雷达是一种通过发射激光束并测量反射光来获取物体距离和形状信息的传感器。
它具有高精度、高分辨率和长探测距离的特点,能够在复杂的环境中准确地识别障碍物和道路标识。
在智能电动汽车中,激光雷达通常被安装在车顶或车头部位,用于自动驾驶系统的环境感知。
然而,激光雷达的成本较高,这在一定程度上限制了其在量产车型中的广泛应用。
毫米波雷达则是利用毫米波频段的电磁波进行探测的传感器。
它能够在恶劣天气条件下(如雨雪、雾等)正常工作,具有较好的穿透能力。
毫米波雷达主要用于测量车辆与前方障碍物的距离和相对速度,为自适应巡航控制和自动紧急制动等功能提供支持。
与激光雷达相比,毫米波雷达的成本相对较低,但精度和分辨率略逊一筹。
摄像头是智能电动汽车中最常见的传感器之一。
它可以获取丰富的图像信息,包括道路标线、交通信号灯、行人、车辆等。
通过图像处理算法,摄像头能够识别各种交通标识和物体。
不过,摄像头在光线不足或恶劣天气条件下的性能会受到一定影响,而且其对距离的测量精度不如激光雷达和毫米波雷达。
超声波传感器主要用于短距离探测,如车辆的泊车辅助系统。
它通过发射超声波并接收反射波来测量障碍物的距离,具有成本低、安装方便的优点。
但超声波传感器的探测范围较小,通常在数米以内。
惯性测量单元(IMU)用于测量车辆的加速度、角速度和姿态等信息。
它可以帮助车辆在没有 GPS 信号的情况下保持定位和导航的准确性,同时也为车辆的稳定性控制提供了重要的数据支持。
方向盘转角传感器工作原理
方向盘转角传感器工作原理一、概述方向盘转角传感器是汽车电子控制系统中的重要组成部分,用于检测方向盘的旋转角度和转动方向,为汽车控制系统提供必要的信息。
它被广泛应用于汽车导航系统、主动安全系统、汽车车身电子稳定系统(ESP)等电子控制系统中。
二、工作原理1.类型与结构方向盘转角传感器主要有三种类型:磁感应式、光电式和霍尔效应式。
这三种传感器结构基本相同,都包括感应元件、窗口和外壳。
其中,感应元件由磁芯和线圈组成,用于感应方向盘的转动;窗口则与转向轴接触,用于传递转角信息;外壳则保护整个感应元件。
此外,还有一些非接触式转角传感器,如基于超声波的传感器,其原理是通过超声波传播的时间和距离来计算方向盘的转角。
2.工作过程当方向盘转动时,转向轴带动窗口随之转动,从而改变窗口与磁芯之间的空气间隙。
这个空气间隙会在一定范围内变化,导致磁阻发生变化。
这个变化会引发线圈中产生对应的电动势,这个电动势被转化为电子信号,并通过信号线传递给汽车控制系统。
传感器控制器然后对信号进行处理,计算出方向盘的当前位置和旋转方向。
对于磁感应式传感器,空气间隙的变化会改变磁通量,从而产生与方向盘转动角度成比例的电压信号;对于光电式传感器,窗口的旋转会依次露出和遮蔽光源,导致通过光敏元件的光量发生变化,从而产生电信号。
三、信号处理汽车控制系统根据接收到的信号,可以判断方向盘的转动角度、转动方向以及转速等信息。
为了提高测量精度和稳定性,通常会对传感器输出的信号进行滤波处理,如低通滤波、高阻滤波等。
此外,一些高级的控制系统还会采用自适应算法,根据当前的车速、车轮转速等信息,对传感器的标定参数进行调整,以提高系统的准确性。
四、应用与影响方向盘转角传感器在汽车电子控制系统中发挥着至关重要的作用。
它能够为控制系统提供准确的方向盘状态信息,帮助控制系统做出更准确的决策。
例如,在主动安全系统中,方向盘转角传感器可以用于控制车辆的刹车系统、安全气囊等设备,提高车辆的安全性;在导航系统中,方向盘转角传感器可以用于提供更精确的导航信息,提高驾驶的便利性和准确性;在车辆动力学控制中,转角传感器可以用于调整车辆的转向响应和稳定性,提高车辆的操控性能。
汽车方向盘转角传感器的开发应用
汽车方向盘转角传感器的开发应用张永东【摘要】汽车方向盘转角传感器,是车辆稳定性控制系统ESP和电动助力转向系统EPS的一个组成部分.本文介绍的方向转角传感器基于巨磁阻效应,从工作原理及设计方案方面对转角传感器的开发应用进行分析论证.【期刊名称】《汽车电器》【年(卷),期】2019(000)007【总页数】2页(P40-41)【关键词】转角传感器;巨磁阻;角度;齿轮;设计方案【作者】张永东【作者单位】山西中航锦恒科技有限公司,山西太原 030032【正文语种】中文【中图分类】U463.6方向盘转角传感器(SAS)用于检测车辆行驶过程中方向盘的转动角度和角速度,来预测驾驶员的操作意图,从而为车辆的其他控制系统如ESP、EPS、AFS、ADAS、PLA等提供控制动作的依据,其精度和稳定性直接关系着行车安全。
汽车电控技术进步推动了汽车传感器技术的发展,随着市场对传感器要求的不断提高,出现了很多新型的方向盘转角传感器。
本文所涉及到的新型转角传感器属于数字非接触式绝对值转角传感器,是基于巨磁阻(GMR)效应的角度传感器。
这种传感器经过特殊设计,可以实现非接触式多圈绝对角度的检测,并通过CAN总线提供给ECU控制信号。
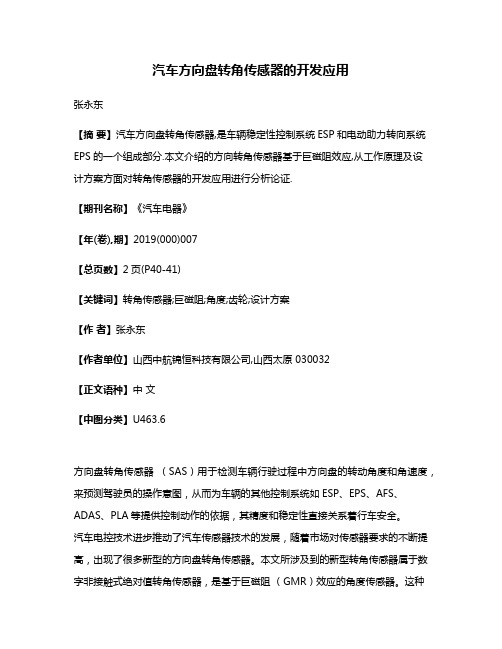
1 转角传感器的结构形式方向盘转角传感器通常安装在方向盘下方的转向柱或时钟弹簧上,采用3个齿轮的机械结构来测量转过的角度。
转角传感器基本组成及结构如图1所示。
主要有上、下壳体、3个齿轮组成的机械结构,两个磁铁及对应的两个磁阻角度传感器,电路板等组成。
图1 传感器基本组成及结构2 转角传感器的工作原理方向盘转角传感器安装在方向盘下方,大齿轮A(90齿)随方向盘一起转动,与两个齿数不相等的从动小齿轮B(26齿)和小齿轮C(30齿)啮合。
两个小齿轮轴与传感器外壳一起固定在车身,每个小齿轮上各设置有水平充磁的永磁体,随齿轮转动,两块永磁体上方分别放置固定不动的磁阻角度传感器,通过微处理机可采集两个小齿轮的转角。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
制 了样 机 , 进行 了实 际转 角检 测 , 对实 验结 果 进行 了误 差分 析 。实 验证 明 : 并 该传 感器 能 达到 方 向盘
t e s n o s gv n,n ld n h e in o e r , a c lt n meh d o b o u e a g lrp s in, n o h e s ri ie i cu ig t e d s ft g a s c l ua i t o fa s l t n u a o i o a d s me g wo o t
0 引 言
周绝对角位置传感器 , 实验结 果可 知 , 从 该传感器具有 体积 小、 成本低 、 运行可靠 、 精度合理等优点 。
COdn t g c nrl f n w el O riai o t o i— h e moo d v n lcr v hce (E ) n v l e sr t cu e ae o n o tr r e ee tc e il i i V .A o e sno sr tr b sd n u
摘Leabharlann 要 :方 向盘 + 2 。 _ 0 绝对 角位 置 的测 量 是 轮 式 驱 动 电动 汽 车 转 矩 协 调 控 制 解 决 方 案 的 关 键 之 一 。通 过 7
1 6位处 理器 dPC 0 6 1A与两片 T E 02通信 , sI3 F 0 0 LS1 设计了一种基 于 iMR的 + 2 。 G 7 0 绝对 角位置非 接触式 传感器 , 并可通过外 部中断设置方 向盘 的回正零点 。给出 了该传感器的具体实现方案 , 包括 2个从动齿轮
+2。 7 0 绝对角位置 的测量要求 , 为轮式驱动 电动汽车转矩协调控制打下 了基础 。 关键词 :转矩协调控制 ;电动汽车 ;角度传感器 ;iMR G
_
中 图分 类 号 :u4 3 T 3 6 ; P2 1
文 献 标 识 码 :B
文 章 编 号 :10 -7 7 2 1 )30 3 -3 00 98 ( 0 1 O -0 20 -
f rtr ue c o dia ig c n rlo n— e lmo o rv n EV. o o q o r n tn o to fi wh e t rd e i
K y w r s oq ec odn t gc n o ; l t cvhc ( V) a g e sr i MR e o d :tru o ria n o t l e cr e i e E ; n l s no ; G i r e i l e
S u y o h te i t d n t e se rng whe la l e s r u e e ng e s n o s d
f r e e t i e i l 0 l c rc v h c e
L a IH o, XU n—in Ya l g a
( c ol f l ti l n ier g S a d n nvri ,ia 5 0 1 C ia S h o o e r a g ei ,h n o gU iesy Jn n2 06 , hn ) E c c E n n t
p o f ta h ss n o a e h e n so +7 0 a s lt n u a o i o e e t n,a ig t e fu d t n r os h tt i e s rc n me tt e d ma d f - 2 。 b ou e a g lrp s in d t ci l yn h o n ai t o o
d bu gig prblms ae a s s u s d i e al Th ro nay i fe p rm e tlr s lsi r s ntd. e r s l e g n o e r lo dic s e n d ti. e e rra l ss o x e i na e u t sp e e e Th e u t
ds C PI 30F 1 60 0A o c mm u i aig n c tn wih wo t t TLES 2 s d pe 01 i a o td.A ± 7 0。a s l t a g l r o iin o tcl s 2 b o ue n u a p sto c na te s sns rba e n i R sde ine a e opontc n b e h o g x ena n er to Th mplme ai n f e o s d o GM i sg d, nd z r i a e s tt r u h e tr lit rup in. e i e ntto so
A b tac : The d tc in o te ng a g lrpo iin rng s +7 sr t ee to fse r n u a sto a e i - 20。,s o e o he k y pato outo o tr ue i i n ft e r fs l i n t o q
3 2
传 感 器 与 微 系 统 ( rnd cr n coyt eh o g s Tasue dMi ss m Tc nl i ) a r e oe
21 0 1年 第 3 0卷 第 3期
电 动 汽 车 方 向 盘 绝 对 角 位 置 传 感 器 的 研 究
李 浩, 徐衍 亮
( 山东 大 学 电气 工 程 学 院 , 东 济 南 2 0 6 ) 山 50 1