超声波液位测量系统设计
超声波液位计测量的工作原理产品特点及应用 液位计工作原理
超声波液位计测量的工作原理产品特点及应用液位计工作原理超声波液位计是一系列非接触,高牢靠、低价格、免维护的物位仪,它彻底解决了由压力变送器、电容式浮子式等测量方式带来的缠绕、泄露、接触介质、昂贵的维护等麻烦,目前,要求对于液位和物位进行无接触式测量的现场越来越多,由于超声波液位计不必接触工业介质就能够充分大多数密闭或者打开容器里的物位测量要求,并且目前的科学技术已经进展到超声波系列的物位测量仪器可以测量几厘米到几十厘米的范围,而且在恶劣条件下也表现出了非凡的本领,因些在很多对于安装环境多而杂的情况下,超声波液位计成为了紧要的选用类型。
关于超声波液位计我们需要了解的东西很多,下面对大家介绍一下超声波液位计原理、特点、应用的缺陷和不足、适应场合注意事项、使用的环境条件、选择方法、故障及解决方法。
超声波液位计原理超声波液位计安装于容器上部在电子单元的掌控下,探头向被测物体发射一束超声波脉冲。
声波被物体表面反射,部分反射回波由探头接收并转换为电信号。
从超声波发射到被重新被接收,其时间与探头至被测物体的距离成正比。
电子单元检测该时间,并依据已知的声速计算出被测距离。
通过减法运算就可得出物位值。
由于温度对声速具有影响,所以仪表应测量温度,以修正声速。
超声波液位计的特点1、高质量零件:电路设计从电源部分起就选用高质量的电源模块,元器件选择进口稳定牢靠的器件,完全可以替代同类型国外进口仪表。
2、超高精度:我公司拥有的声波智能器,使仪表的精度大大提高,液位精度达到0.25%,能够抗种干扰波。
3、专业的声波智能技术:的声波智能技术软件可进行智能化回波分析,无需任何调试及其它的特别步骤,此技术具有动态思维、动态分析的功能。
4、适应安全稳定:超声波液位计是一种非接触仪表,不跟液体直接接触,因此故障率低。
超声波液位计应用的缺陷和不足1、超声波本质是一种机械波,传播需要介质,那么超声波液位计大的应用缺陷是不能用于真空环境和传播介质变化(如强挥发性)的环境;2、超声波液位计的换能器由压电陶瓷和塑性外壳灌封而成,其不能应用于高温高压环境,一般超声波液位计的大耐受温度为80℃;3、超声波是一种机械波,在传播的过程中会存在衰减,考虑到精度和量程的冲突性,超声波液位计实际应用中量程范围较小,精度稍差,所以其不能用于大量程和高精度的场合;4、超声波液位计在实际应用中测量的时间量,结合声速,可以得出距离值(时间声速=距离),而声速随着介质和温度变化,所以超声波液位计也不能应用于温度频繁变化的场合。
罗斯蒙特超声波液位计调试方法
一、概述罗斯蒙特超声波液位计是一种常用的工业液位测量仪器,其精确度和稳定性受到了广泛认可。
为了确保液位计的正常运行,及时发现故障并进行调试是非常重要的。
本文将介绍罗斯蒙特超声波液位计的调试方法,帮助工程师和操作人员更好地了解和掌握液位计的调试技术,提高工作效率和准确性。
二、罗斯蒙特超声波液位计调试方法1. 环境检查在进行液位计的调试工作之前,首先要对液位计安装位置的环境进行检查。
确保周围没有对超声波信号产生影响的障碍物和干扰源,如大型机械设备、高温设备等。
另外,还需要检查液体的性质和温度,因为不同的液体性质和温度对超声波的传播有一定影响。
2. 电气连接检查接下来要检查液位计的电气连接是否正确,包括电源输入、信号输出和接地线。
确保所有连接牢固可靠,无松动或短路现象,并且符合设计要求。
另外还需要检查液位计的电源是否正常,电源线路是否稳定,以及信号线路是否通畅。
3. 调试软件设置对于数字化的液位计,通常需要通过专门的调试软件来进行参数设置和校准。
在进行调试前,需要安装好相关的软件,并对软件进行设置和校准。
其中包括对液体类型、液体高度、超声波频率等参数进行设置,以确保液位计的测量精度和稳定性。
4. 超声波传感器设置超声波传感器是液位计的核心组件,其设置直接影响了液位计的测量精度。
在进行超声波传感器设置时,需要注意以下几点:要确保传感器安装位置的垂直度和水平度,以保证超声波的发射和接收方向正确;需要对超声波的发射频率和功率进行调节,以适应不同液体的测量要求;还需要对传感器的灵敏度进行调节,以确保其在不同液位条件下都能正常工作。
5. 远程监控和调试对于一些较大规模的工业系统,通常会配备远程监控和调试系统,以实现对液位计的远程监控和调试。
在进行远程监控和调试之前,需要确保网络连接稳定可靠,而且系统配置正确。
另外,还需要对远程监控和调试软件进行设置和校准,以确保其能够准确地反映液位计的工作状态,并且进行远程调试操作。
北京科技大学科技成果——大量程超声波液位计的研制

北京科技大学科技成果——大量程超声波液位计的研制项目简介液位计是由超声探头和智能超声测量仪组成的非接触连续式物位测量仪表,其测量方法是基于所测物料表面反射回波脉冲的传输而得到的,将发射波和回波之间的时间延时转换成与物位成比例的测量值。
智能超声料位测量仪吸收了国外在超声检测方面的先进技术,以性能优越的微处理机及大规模集成电路芯片研制成的产品,在软件方面具有回波识别及统计数据处理功能。
超声波液位计主要是面向化工石化,钢铁冶金,环境保护等领域的液位测量与控制。
目前国内市场该类产品主要被进口产品占领,我们研制的超声波液位计在了解了国内外产品实际使用的基础上,对超声波测量进行了专门的研究。
该液位计主要测量液体的水位高度和其他液体的液位,并可以应用在固体的料位测量上,本仪器尤其对复杂工况下的液位测量进行了专门的研究,适合各种复杂情况下的液位的测量。
目前国内外液位计产品的研制厂家较多,但绝大多数只适合短距离,小干扰的场合,而对真正工业现场,有强干扰和大量程的场合,几乎还是进口产品的天下,我们设计的产品,其技术水平已超过国外同类产品的水平,在工业现场经过了多次的改进后,产品已经成熟。
并在燕京啤酒,太原钢铁公司,肖家河污水厂等工业现场得到了实际的应用,该系统在处理工业现场复杂回波方面,接收电路信号表现十分稳定,抗干扰能力强。
超声波测量系统采用单片机设计,具有4-20mA电流输出。
最大量程为120米。
四位数字显示,可显示料位值或空仓值。
显示单位有米、%和mA,由键盘设定。
有上、下限及故障报警功能,并配有继电器输出。
具有模拟量、数字量输出。
液位计可应用在冶金、煤炭、电力、石油、化工、粮食等部门,检测储矿槽、煤仓、粮仓等料仓料位,检测储液罐或液槽等液位,也可作为河流、明渠的水位测量。
超声探头按应用场合分普通型和防腐型,其中普通型探头允许在粉尘较大的环境中使用;防腐探头采用耐腐材料,密封结构,防尘、防水,用于测量有腐蚀性介质的料位和液位。
超声波液位计的设计

基于参考声速法超声波液位的测量专业:电机与电器班级:06班姓名:陈志伟学号:2012230基于参考声速法超声波液位的测量摘要目前市场上的超声波液位计品种多样,大多采用温度补偿方法对超声波传播速度进行校正,以提高仪表测量精度。
此方法需在系统外加一个温度测量单元,通过测量环境温度,获得实际声速;由此也引进了温度测量误差,从而限制了系统精度的进一步提高。
本文是利用参考声速法实现声速校正的超声液位测量系统。
设计中采用气介式测量方式,将一个反射性能良好的挡板固定在超声波探头和液面之间,通过测量挡板回波的时间,实现精确的声速校正,从而大大提高液位测量精度。
此系统不但继承了传统超声波液位计的优点,而且无需采集环境温度,避免了由于测温误差引起的系统误差。
文中以超声波原理为理论依据, 以超声波传感器为接口部件, 利用超声波在空气中传播的时间差来测量距离, 从而设计了一套超声波测距系统。
这种新型声速校正方法相对于传统补偿方法,性能更加优越,是今后超声波液位测量的发展方向,具有广阔的发展前景。
关键词:超声波液位计,探头,声速校正,挡板第一章绪论1.1液位测量的意义近年来,随着电子技术的迅速发展,液位测量仪表中的测量技术经历了有机械向机电一体化再到自动化的发展过程。
结合这两大技术,尤其是将微处理器引进液位测量系统,使得液位计的精度越来越来高,越来越来向智能化、一体化、小型化发展。
在实际应用中,可根据需要选择合适的液位计,满足测量精度、测量环境等多方面的要求。
1.2液位计的种类根据工作原理的不同,液位计可分为以下几种:直读液位计,浮子液位计,静压液位计,电磁液位计,超声波液位计,光纤液位计等等。
传统的液位计逐渐被这些新型液位计所取代。
新型液位计无论是在精度稳定性,还是在智能测量方面都比传统液位计有着明显的优势,是今后液位计发展方向。
其中超声波液位计以其低成本高精度非接触式稳定性好等优势受到广泛青睐,发展出了适应不同场合的超声波液位计,广泛应用于石油化工,航空航天,水利,气象,环保医疗卫生,食品饮料等多个领域。
储油罐液位测量系统设计
储油罐液位测量系统设计一、引言二、系统设计1.系统组成该系统主要包括以下组成部分:1.1超声波传感器:用于发射超声波信号并接收返回的信号。
1.2控制器:负责控制传感器的工作,并将测量结果显示在屏幕上。
1.3信号处理模块:用于处理传感器返回的信号,并将其转换为液位高度。
1.4数据存储模块:将测量结果存储在数据库中,以备后续使用。
2.工作原理该液位测量系统基于超声波技术。
超声波传感器通过发射超声波信号并接收返回的信号来计算液位高度。
当超声波信号遇到液面时,一部分信号会被液体反射,传感器接收到这部分信号并计算液位高度。
3.系统特点3.1非接触式测量:该系统使用超声波技术进行液位测量,与传统的机械测量方法相比,具有非接触式测量的优势,可以确保测量准确性,并减小设备磨损。
3.2高精度测量:超声波技术可以提供较高的测量精度,能够满足储油罐管理的需求。
3.3实时监测:该系统可以实时监测液位变化,并将测量结果显示在控制器的屏幕上,方便操作员随时了解储油罐的液位状态。
4.设计细节4.1传感器选择:选择适合的超声波传感器对于测量系统的准确性至关重要。
应该考虑传感器的工作频率、测量范围、分辨率等参数,并根据具体的应用需求选择合适的传感器。
4.2信号处理:传感器返回的信号应进行处理,以提取有效的液位高度信息。
可以使用滤波算法和傅里叶变换等信号处理技术来提高信号的质量。
4.3可靠性设计:液位测量系统应具有良好的可靠性,以保证系统长时间稳定工作。
可以采取冗余设计、故障检测和报警机制等方法来提高系统的可靠性。
五、总结本文介绍了一个基于超声波技术的储油罐液位测量系统的设计。
该系统利用超声波传感器进行非接触式测量,能够提供高精度的液位测量结果,并实时监测液位变化。
该系统具有较高的可靠性和稳定性,适合应用于储油罐的液位管理和控制。
高精度超声波液位测量系统的设计与实现
关键词 : 高精度 ; 超 声波; 液位测量; 时间增益补偿 ; 数字滤波 中图分类号 : T P 2 1 6 文献标识码 : A 文章 编号 : 1 0 0 2—1 8 4 1 ( 2 0 1 3 ) 0 7— 0 0 4 6— 0 3
De s i g n a nd I m pl e me n t a t i o n o f Lo w Po we r Co ns um p t i o n Ul t r a s o ni c Li qu i d Le v e l Te s t i n g S y s t e m
Ab s t r a c t : T o S O l V e t h e p r o b l e m o f h i g h e r p o we r c o n s u mp t i o n a n d l o we r a c c u r a c y i n t h e e x i s t i n g me a s u i r n g s y s t e m, u l t r a s o n i c
3 0 0 4 0 1 ) ( 河北工业大学信息工程学院 , 天津
摘要: 文 了一种基 于 MS P 4 3 0 F 1 4 9单 片机 的高精度
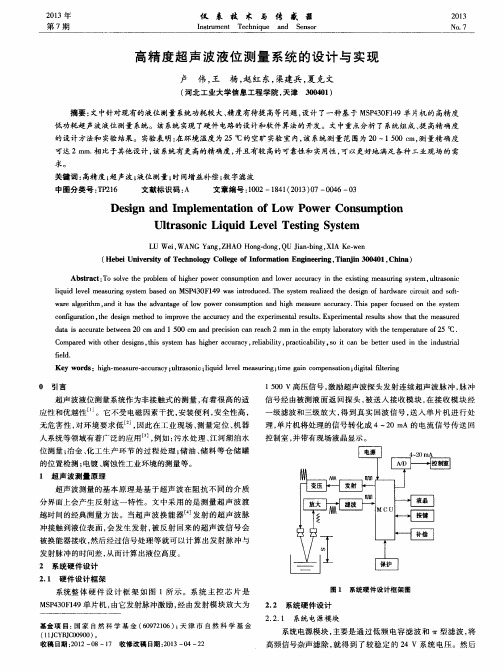
低 功耗 超声波液位测 量系统 。该 系统 实现 了硬件 电路 的设 计和软件 算法的开发 。文 中重点分析 了系统组成 、 提 高精确度
的设计方法和实验结果。实验表 明: 在环境 温度为 2 5℃的 空旷实验 室 内, 该 系统测量 范围为 2 0—1 5 0 0 c m, 测量 精确度 可达 2 m m. 相 比于其他设计 , 该 系统有更 高的精确度 , 并且有较 高的可靠性和 实用性 , 可以更好地 满足各种 工业现场的需
用51单片机设计超声波测距系统的设计原理及电路(附源程序)
基于51单片机的超声波测距仪说明书引言超声波测距仪,可应用于汽车倒车、建筑施工工地以及一些工业现场的位置监控,也可用于如液位、井深、管道长度的测量等场合。
利用超声波指向性强,能量消耗缓慢,在介质中传播的距离较远,因而超声波经常用于距离的测量。
利用超声波检测往往比较迅速、方便、计算简单、易于做到实时控制。
一、性能要求该超声波测距仪,要求测量范围在0.08-3.00m,测量精度1cm,测量时与被测物体无直接接触,能够清晰稳定地显示测量结果。
二、工作原理及方案论证超声波传感器及其测距原理超声波是指频率高于20KHz的机械波。
用超声波传感器产生超声波和接收超声波,习惯上称为超声波换能器或超声波探头。
超声波传感器有发送器和接收器.超声波传感器是利用压电效应的原理将电能和超声波相互转化,即在发射超声波的时候,将电能转换,发射超声波;而在收到回波的时候,则将超声振动转换成电信号。
超声波测距的原理一般采用渡越时间法TOF(timeofflight)。
首先测出超声波从发射到遇到障碍物返回所经历的时间,再乘以超声波的速度就得到二倍的声源与障碍物之间的距离。
根据要求并综合各方面因素,采用AT89C52单片机作为主控制器,用动态扫描法实现LED数字显示,超声波驱动信号用单片机的定时器完成,超声波测距仪的系统框图如下图所示:图1 超声波测距仪系统设计框图三、系统硬件部分硬件部分主要由单片机系统及显示电路、超声波发射电路和超声波检测接收电路三部分组成。
1.单片机系统及显示电路单片机采用AT89C52来实现对CX20106A红外接收芯片和TCT40-10系列超声波转换模块的控制。
单片机通过P1.1引脚发射脉冲控制超声波的发送,然后单片机不停的检测外中断0口INT0引脚,当INT0引脚的电平由高电平变为低电平时就认为超声波已经返回。
计数器所计的数据就是超声波所经历的时间,通过换算就可以得到传感器与障碍物之间的距离。
显示电路采用简单实用的4位共阳LED数码管,段码用74LS244驱动,位码用PNP三极管驱动。
基于单片机的超声波液位检测系统设计
基于单片机的超声波液位检测系统设计作者:马莹郑文斌来源:《海峡科学》2007年第10期[摘要] 介绍了利用AT89C51单片机控制的超声波测距系统的原理。
给出了系统构成,并在数据处理中采用了温度补偿修正。
此系统具有易控制、工作可靠、测量精度高的优点,可实时监控液位。
[关键词] 单片机超声波测距温度补偿1 引言在许多工业生产系统中,需要对系统的液位或物料位进行监测,特别是对具有腐蚀性的液体液位的测量,传统的电极法是采用差位分布电极,通过给电脉冲来检测液面,电极长期浸泡在液体中,极易被腐蚀、电解、失去灵敏性,因而对测试设备的抗腐蚀性要求较高。
超声波液位检测系统,利用了超声波传感技术的原理,采取一种非接触式的测量方法,能够实现对工业系统中液位或物料位的检测;而且超声波具有很好的指向性和束射特性,人耳听不见,一般不会对人体造成伤害,检测工程方便、迅速、易做到实时控制,而且测量精度又能达到工业实用的要求,所以有广泛的应用前景。
2 超声波测距原理所谓超声波就是指频率高于20kHz的机械波,一般由压电效应或磁致伸缩效应产生;它沿直线传播,当频率越高,绕射能力越弱,但反射能力越强;它还具有强度大、方向性好等特点,为此,利用超声波的这些性质就可制成超声波传感器。
超声波传感器是利用超声波在超声场中的物理特性和各种效应研制而成的传感器。
超声波传感器按其工作原理可分为压电式、磁致伸缩式、电磁式等[1],其中以压电式最为常用。
压电式超声波传感器常用的材料是压电晶体和压电陶瓷,它是利用压电材料的压电效应来工作的:逆压电效应将高频电振动转换成高频机械震动,从而产生超声波,可作为发射探头;而正压电效应是将超声波振动转换成电信号,可作为接收探头。
超声波测距的原理主要是由超声波传感器的发射探头发射超声波,当超声波遇到障碍物时,会被反射,利用单片机记录超声波发射的时间和接收到回波的时间,根据当前环境下超声波的传播速度,即可通过公式S=C*[T/2](S为被测距离,C为空气中声速,T为回波时间,T=T1+T2)计算出超声波传播的距离,也就得到了障碍物离测试系统的距离。
水箱液位控制系统设计设计
水箱液位控制系统设计设计一、系统概述水箱液位控制系统是一个智能化的系统,用于控制水箱液位并保持在设定的范围内。
该系统由传感器、控制器和执行器组成,通过传感器检测水箱液位,并将液位信号传输给控制器,控制器根据设定的参数进行判断和控制,最终通过执行器完成控制动作。
二、系统组成1.传感器:使用浮球传感器或超声波传感器来检测水箱液位。
传感器将液位转化为电信号,并传输给控制器。
2.控制器:控制器是系统的核心部分,它接收传感器的信号,并进行处理和判断。
控制器可以根据设定的参数来判断液位是否达到目标范围,并通过输出信号来控制执行器的动作。
此外,控制器还需要具备人机界面,方便用户进行参数设置和监测。
3.执行器:执行器根据控制器的控制信号,完成相应的动作。
例如,当液位过高时,执行器可以控制水泵关闭或排水阀打开,以降低液位;当液位过低时,执行器可以控制水泵开启或进水阀打开,以提高液位。
4.电源:为整个系统提供电能。
三、系统设计思路1.确定液位控制的范围:根据实际需求,确定水箱液位的上限和下限。
一般情况下,液位控制范围应在50%至85%之间。
2.选择合适的传感器:根据水箱的结构和液位控制要求,选择合适的传感器。
浮球传感器适用于小型水箱,超声波传感器适用于大型水箱。
3.设计控制器:控制器的主要功能是接收传感器的信号、处理和判断液位,并输出控制信号。
在设计控制器时,需要考虑如下几个方面:-信号处理:传感器的信号可能存在噪声,需要进行滤波处理,保证信号的准确性。
-参数设置:控制器应提供人机界面,方便用户根据实际需求设置参数,例如液位上下限、启停时间等。
-控制算法:根据设定的参数,控制器需要实现相应的控制算法,例如比例控制、积分控制等。
-控制输出:控制器根据判断结果输出控制信号,控制执行器的动作。
4.选用适配的执行器:根据液位控制要求,选择适合的执行器,例如水泵、进水阀、排水阀等。
5.系统集成与调试:将传感器、控制器和执行器进行连接和集成,进行系统调试和性能测试。
基于DYP-ME007超声波模块的液位测量系统设计
案
加 熟
2 0 1 3年 第 4 2卷 第 6期
V O1 . 42 N O. 6 20l 3
I NDUS TRI AL HEATI NG
DO I :1 0 . 3 9 6 9  ̄ .i s s n .1 0 0 2 — 1 6 3 9 . 2 0 1 3 . 0 6 . 0 0 6
基于 D Y P — ME 0 0 7 超声波模块的液位测量系统设计
兰 羽
( 陕西工业职业技术学院 电气学院,陕西 成 阳 7 1 2 0 0 0 ) 摘要 :为了在有毒 、易爆 、高温 、高压 等环境 中快速准确检测液体液位,系统以 S T C 8 9 C5 1 单片机为核心,采用超声波测距模块 D Y P — ME 0 0 7 ,利用超声波测距原理 ,由 S T C 8 9 C 5 1 单片机控制 D YP — ME 0 0 7模块发射超声波,遇到被 测液面反射后模块接收 回波, 通 过单片机 记录超声 波经 过路径所 用时间,计算 出超声波走过距离 ,从而得 到液位 的高度 ,本 文完成 了系统 的硬件 电路和软件 编 程 的设计 。经实验表明:系统 测量 范围在 2~ 4 0 0 e m,测量精 度 1 c m,符合实 际需要 。 关键词 :单片机 S T C 8 9 C 5 1 ;超声波测距 ;D YP - ME 0 0 7 模块 ;液位测量 中图分类号 :T P 2 1 2 1 文献标志码 :A 文章编号 :1 0 0 2 . 1 6 3 9 ( 2 0 1 3 ) 0 6 — 0 0 1 8 - 0 3
De s i g n o f Ul t r a s o n i c Li q u i d Le v e l Me a s u r i n g SMo d u l e
超声波液位测量系统设计
3硬件 原理 电路
本系统的简要硬件 电路如 图 2 ,发射 和 接 收 硬 件 电 路 采 用 L 1 1 超 声 波专 用 M 82
集 成 芯 片 ,L 1 1 一 种 既 能 发送 又 能 M 8 2是 接 收 超 声 波 的 芯 片 ,采 用 这块 集 成 可以 简
化硬件 电路 ,提高系统的可靠性 。芯片 内 部 包 括 :脉 冲 调 制 C 类 振 荡 器 , 高 增 益 接收 器 ,脉冲 调制检测 器,噪音抑制 器。 当 8脚为高 电平时 , M1 1 处于发射 L 82 模式 , 1 第 管脚外接 C1L 决定电路的发射 ,1 或接收的工作频率 , C 振荡惜路被切换为 u 1
同时有噪声也被检测 , 可以通过 1 管脚外 7 接的电路进行滤波。当 1 管脚上的 电压变
得小到不能 触发检测时 ,积分器经延时复
一
转 幕 、 页 1
量管的底部与被测液体连通 ,便于被测液 体进 入测量管 ;其二 ,浮子的密度必 须小 于被 测液 体 的密 度 ,且浮 子具 备抗 腐蚀
波反射的材料 ;其四 ,测量 管采 用抗腐蚀
性强 的不 锈钢 材料 。
l
2参 比法液 位测 量原 理
参 比 法其 原 理 是 利 用 超 声波 换 能 器发 出的超声波脉 冲, 通过气介质传播, 在密度
变化较大的界面处形成反射 回波传到换能 器并 将 其 接 收 。若 测 出 超 声 波 从 发射 到接
超 声波专 用集成 芯片组成 的高精度 液位 测量 系统 。针 对 自校 准装 置… 提 出 了一 些新 的改
故被 测量液 体 的液位 :
H=HO h - -d
H : Ho一一 T ] 1 o
基于单片机的超声波液位计设计
基于单片机的超声波液位计设计
概述:
超声波液位计是一种新颖的非接触式液位检测技术。
本文将基
于单片机设计一款基于超声波技术的液位计。
主要器材:
1.超声波传感器(负责探头与水面之间的物理量)
2.单片机
3.LCD显示屏
4.蓄电池(负责供电)
5.喇叭发声器(将波形转换成声音)
液位计的工作原理:
当发射器发出的超声波被液体遮挡,接收器接收到衰减的超声
波信号,可根据上报的信号直接算出液位的高度。
波纹发射器将电
信号转换成声波。
声波经再加工过程后,从发射器射出,声波在媒
质中传递,信号由接受器采集,采集后传至电路板和显示屏上显示。
液位计的设计流程:
1.设计硬件电路,包括LCM、单片机、蜂鸣器、超声波发射器
和接收器等。
2.编写程序;
3.测试电路设计的合理性。
液位计的设计原则:
1.系统要稳定,测量精度要高。
2.工作可靠性要好,尽量减少误差。
3.为了让检测系统更加方便使用,LCM要能够轻松的展示液位高度。
液位计的设计要点:
1.超声波发射器的输出角度要合理,信号不要受到扭曲。
2.使用ADC转换时,要尽量减小信号波动。
3.选用合适的蜂鸣器,以免误差过大。
4.液位计的设计电路要合理,系统信噪比要低。
总结:
本文提出了一款基于超声波技术的液位计的设计方法,将单片机、超声波传感器、LCD显示屏等元件充分利用起来,设计的液位计效果良好,具有普遍的应用价值。
基于单片机的超声波测距系统设计
基于单片机的超声波测距系统设计超声波测距系统在物联网和机器人等领域有着广泛的应用。
超声波作为一种非接触的测量方式,可以有效地避免物体表面的污染,适用于各种环境下的距离测量。
本文将介绍基于单片机的超声波测距系统的设计方法。
超声波测距的原理超声波测距是基于声波传播时间的测量。
超声波发射器发出超声波,经物体反射后被接收器接收。
根据声波的传播速度和接收时间,可以计算出超声波的传播距离。
常用的超声波频率为40kHz左右,其传播速度约为340m/s。
单片机与超声波测距在超声波测距系统中,单片机作为主控制器,负责控制整个系统的运行。
它接收来自超声波发射器的信号,触发超声波的发送,并计时等待超声波的返回。
当超声波被接收器接收时,单片机通过计算时间差来计算距离。
距离计算距离计算公式为:距离 =声速×时间差 / 2。
在系统中,声速是已知量,因此关键是准确测量时间差。
单片机通过计时器来精确测量从超声波发射到接收的时间,从而计算出距离。
误差分析超声波测距系统可能出现的误差主要有以下几种:1、计时器计时误差:这是时间测量误差的主要来源。
为提高计时精度,可以使用高精度的计时器或者采取软件滤波算法来降低误差。
2、声速误差:由于环境温度、湿度等因素的影响,声速可能会发生变化,从而影响测量结果。
可以通过引入温度传感器来对声速进行补偿,以减小误差。
3、反射面误差:由于被测物体的表面形状和质地等原因,超声波可能无法完全反射回来,导致测量结果偏小。
为减少误差,可以在发射端和接收端加装角度调节装置,使超声波尽量垂直于被测物体表面。
应用实例以下是一个基于单片机的超声波测距系统的设计实例:1、硬件选择:选用STM32F103C8T6单片机作为主控制器,并选用HC-SR04超声波传感器作为超声波发射和接收器。
该传感器具有外接和控制电路简单、性能稳定、可靠性高等优点。
2、硬件连接:将超声波传感器的Trig和Echo引脚分别连接到单片机的GPIO口,以控制超声波的发射和接收。
超声波传感器测液位
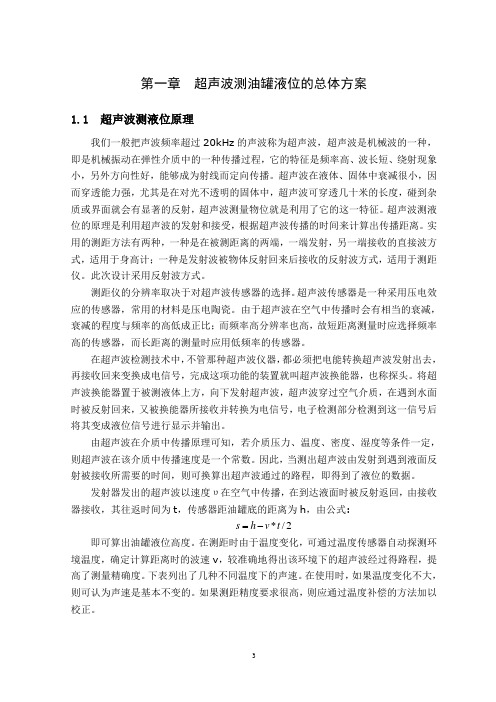
第一章超声波测油罐液位的总体方案1.1 超声波测液位原理我们一般把声波频率超过20kHz的声波称为超声波,超声波是机械波的一种,即是机械振动在弹性介质中的一种传播过程,它的特征是频率高、波长短、绕射现象小,另外方向性好,能够成为射线而定向传播。
超声波在液体、固体中衰减很小,因而穿透能力强,尤其是在对光不透明的固体中,超声波可穿透几十米的长度,碰到杂质或界面就会有显著的反射,超声波测量物位就是利用了它的这一特征。
超声波测液位的原理是利用超声波的发射和接受,根据超声波传播的时间来计算出传播距离。
实用的测距方法有两种,一种是在被测距离的两端,一端发射,另一端接收的直接波方式,适用于身高计;一种是发射波被物体反射回来后接收的反射波方式,适用于测距仪。
此次设计采用反射波方式。
测距仪的分辨率取决于对超声波传感器的选择。
超声波传感器是一种采用压电效应的传感器,常用的材料是压电陶瓷。
由于超声波在空气中传播时会有相当的衰减,衰减的程度与频率的高低成正比;而频率高分辨率也高,故短距离测量时应选择频率高的传感器,而长距离的测量时应用低频率的传感器。
在超声波检测技术中,不管那种超声波仪器,都必须把电能转换超声波发射出去,再接收回来变换成电信号,完成这项功能的装置就叫超声波换能器,也称探头。
将超声波换能器置于被测液体上方,向下发射超声波,超声波穿过空气介质,在遇到水面时被反射回来,又被换能器所接收并转换为电信号,电子检测部分检测到这一信号后将其变成液位信号进行显示并输出。
由超声波在介质中传播原理可知,若介质压力、温度、密度、湿度等条件一定,则超声波在该介质中传播速度是一个常数。
因此,当测出超声波由发射到遇到液面反射被接收所需要的时间,则可换算出超声波通过的路程,即得到了液位的数据。
发射器发出的超声波以速度υ在空气中传播,在到达液面时被反射返回,由接收器接收,其往返时间为t,传感器距油罐底的距离为h,由公式:s-=h*tv2/即可算出油罐液位高度。
超声波测距系统设计毕业论文
毕业设计(论文)标题:超声波测距系统设计学生姓名:**系部:电子工程系专业:应用电子技术班级:高电子0501班指导教师:***株洲职业技术学院教务处制目录摘要...........................................................................(Ι) 1、绪论 (1)1.1超声波传感器的类型 (2)1.2压电式超声波发生器原理 (2)1.3超声传感器的特性 (3)1.4速度影响因素及其补偿 (3)1.5超声波测量距离的原理 (3)2、超声波测距仪总体结构 (5)2.1主控芯片的选择 (5)2.2单片机AT89S51 的外围电路 (7)3、超声波发射 (10)3.1 多谐振荡器特点 (10)3.2非对称式多谐振荡器工作原理 (10)3.3超声波发射电路 (11)4、超声波接收 (13)4.1接收放大器的方案设计 (13)4.2超声波接收电路 (13)5、测温芯片AD590 (15)5.1 AD590简介 (15)5.2 AD590的工作原理的内部结构 (16)5.3 测温电路的设计 (17)6 系统软件设计 (18)6.1 系统软件结构 (18)结论 (19)参考文献 (20)附录 (21)后记 (30)摘要文中介绍了一种以单片机AT89S51作为主控制器,最终用7段数码管显示测量距离的超声波测距仪的设计方法。
在设计中通过检测超声波信号从发送到接收的时间间隔t,计算出测量距离s。
但是考虑到超声波传播速度受温度的影响较大,因此系统中还采用了温度传感器AD590来检测周围环境温度,对超声波的传播速度进行温度补偿,提高测量的精度。
本设计是以单片机为核心的测距仪器,可以实现预置、多端口检测、显示等多种功能,并且成本低、精度高、操作简单、工作稳定可靠。
从而实现直接的查看距离值、显示、输出控制的功能。
关键词:超声波;测距;测量误差;温度补偿; AT89S511 绪论虽着电子技术的发展,出现了微波雷达测距、激光测距及超声波测距。
多路无线超声波液位测量系统设计
1 引言
在 石油 化工生 产过 程 中 , 液位 无论 是对于控 制 还是 监 测都 是非 常关键 的参 数 。在常 规 的测量 仪表选 用 时 , 考 虑到被 测量 物体容 易解冻容易 结晶则不 应选用差压 原 理 的液位 仪表 ; 对 于粘 度较 大附着 力较 强的介 质不 应选 用 浮力原理 的L l 1 。然而 以上两种 工况是石 油化工 生产 中
罐 、较大的污水 处理池 、废 气焚烧 的分 离罐等设备 。这 些装置往 往是远离监控 区 , 电缆敷设的难度较 大 , 如果超
出电缆常规 的使 用长度在 线路 中还需要 加入信号放 大设 备, 对 于施 工和成 本 的投入 都 是非常 不利 的。文 中设计
了一种 8路数据 监测 和传 输的无 线超 声波液 位测量 计 , 最 大化 降低远距 离信号 传 输成本 , 提 高传输可 靠性 。
Ab s t r a c t :Ul t r a s o ni c s e n s o r i s t h e c h e a p e s t l i q u i d l e v e l d e t e c t i n g c o n v e n t i o n a l l y , h o we v e r d i s t a n t c a b l e s a r e wi t h h i g h l o s t a n d g r e a t wo r k l o a d, S O i t i s n e c e s s a r y t o d e s i g n t h e mu l t i p l e x wi r e l e s s l i q u i d l e v e l d e t e c t i n g s y s t e m b a s e d o n u l t r a s o n i c s e n s o r . Fr o m u l t r a s o n i c s e ns o r t o wi r e l e s s t r a ns f e r a r e a l l de s i g n e d i n d e p e n d e n t l y f o r t h e l o we s t p r i c e , t h e p r i c e i s o n l y 1 / 4 o f d o me s t i c i n s t r u me n t . Pe r f o r ma n c e i n d i c a t o r s a r e f u l l y q u a l i f i e d b y l a b o r a t o r y a n d ie f l d t e s t s . Ke y wo r d s : wi r e l e s s ; u l t r a s o n i c; l i q u i d — l e v e l ; mu l t i p l e c i r c u i t
基于单片机超声波液位控制器设计
基于单片机超声波液位控制器设计摘要为了能够有效的减少人工在农业生产工作当中,对液体的液位高度控制工作上的消耗,从而设计出基于单片机的超声波液位高度自动控制器,该机器是利用超声波的方式,结合单片机的功能,对液体水位进行监测。
该机器可以将监测得出的结果通过传感器进行实时的传送,再利用单片机的分析功能进行数据分析,之后将单片机得出的数据分析结果进行处理,最后得到一个是否需要启动电机的指令,再将指令传输到电机控制系统当中,这一环节就可以做到对液体水面位置进行智能控制与监测的工作,可以有效地减少人工对液位进行控制的工作量。
关键字:单片机;超声波;液位控制器;前言伴随着国家的发展社会的进步,电子科技也在不断地开发,电子设备不断地被利用到各行各业的生产活动当中,同时对于液位检测工作也可以使用相关的控制器,让检测工作能够自动与智能,并且更加精确。
因此,本文提出结合单片机利用超声波做出可以自动对液面进行检测与控制的机器,本机器由于超声波的优势可以对测距精度要求较高、被测介质较为复杂的液体进行检测。
并且在农业生产活动当中,对于液体的液位检测工作是必不可少的,人工可以对一些没有危险的液体进行检测,但是若是需要对一些特殊的而液体液位进行检测就需要该机器进行辅助的工作。
本机器可以代替直接接触式的传感器对液位进行检测,而本篇文章将以水资源为例,进行对基于单片机超声波液位控制器的设计进行简要阐述。
一、该设计的项目背景随着我国综合实力的提升,社会经济高速发展,人口数量也在不断的增加,因此我国对于环境的需求也在日益提升,因此人们应该加大对水资源的环保意识,在日常生活当中节约用水。
但是对于日常生活以及工业方面,对于水位的控制也是一项重要的工作。
在人们生活当中,水占着关键的影响地位,若是突然停水,一定会影响到人们的日常生活以及生产活动,对其带来许多困扰,若是某个地区长时间的缺水,带来的负面影响会更大,严重到会影响到生态环境的稳定性,造成一些无法挽回的损失。
基于单片机的超声波液位控制器设计
基于单片机的超声波液位控制器设计上海师范大学信机学院毕业设计摘要课题针对液位检测的实际问题,开发了一种基于单片机的超声波液位检测仪.深入讨论了用超声波作为信号源进行液位检测的可行性及优越性,产生误差的各种原因,提出了相应的解决办法。
超声波液位检测仪以单片机 AT89C51 单片机最小系统为核心,利用超声波作为检测信号的手段,对液位进行检测和数据处理,减少了测量过程中的人工干预,方便了工作人员对液位检测的实时监控。
该系统硬件电路设计包含了超声波发射电路、接收电路、温度测量电路和液晶显示电路。
软件设计中,采用模块化程序设计思想,将软件主要分为超声波驱动与数据处理模块、功能模块两大模块。
对软件的这种“自顶向下”的模块化软件编程方法能使软件的结构清晰,有利于软件的调试和修改。
在设计中,由于需要测量的距离范围从几米到十几米,针对超声波振幅在传播时呈指数衰减的特性,最大限度地提高驱动能力,对回波进行多级放大,达到了设计要求。
由于测量精度要求很高,系统进行了温度补偿设计。
实验结果表明该设计方法可以提高超声波液位检测仪的测量精度并且硬件开销不大。
1上海师范大学信机学院毕业设计目录第一章绪论 (1)1.1 课题背景......................................................1 1.1.1 超声波液位仪的研究背景与内容 ............................... 1 1.1.2 超声波液位仪的现状 ......................................... 1 1.2 论文研究内容 ................................................. 2 1.2.1 研究内容 ................................................... 2 1.2.2 论文的章节安排 (3)第二章超声波的液位测量原理 (5)2.1 超声液位仪理论基础 (5)2.1.1 超声波介绍 ................................................. 5 2.1.2 超声波探头的结构和原理 ..................................... 5 2.1.3 T/R40-16 超声波探头 ........................................ 7 2.1.4 传感器的指向角Θ ........................................... 8 2.2 超声波液位仪工作原理 ......................................... 9 2.2.1 超声波液位仪工作原理 ....................................... 9 2.2.2 测量盲区 .................................................. 10 2.3 本章小结 (11)第三章硬件总体设计 (12)3.1 超声液位仪总体设计 .......................................... 12 3.2 单片机电路 .................................................. 14 3.2.1 复位电路设计 .............................................. 15 3.2.2 电源电路设计 .............................................. 16 3.2.3 时钟振荡器 ................................................ 17 3.3 发射电路 .................................................... 18 3.4 接收电路 (19)2上海师范大学信机学院毕业设计3.5 液晶显示电路 ................................................ 20 3.6 温度测量电路 ................................................ 21 3.7 串行通信口电路 .............................................. 23 3.8 本章小结 (25)第四章系统软件设计 (26)4.1 软件总体设计 .............................................. 26 4.1.1 软件设计流程图 ........................................... 26 4.1.2 主程序结构流程图 ......................................... 27 4.1.3 回波接收流程图 ........................................... 29 4.1.4 中断程序流程图 ........................................... 29 4.1.5 串行口通信流程图 ......................................... 30 4.1.6 DS18B20 流程图 ........................................... 31 4.2 软件程序调试 .............................................. 33 4.2.1 复位电路程序调试 ......................................... 33 4.2.2 发送和接收超声波程序调试 ................................. 34 4.2.3 显示程序调试 ............................................. 35 4.2.4 温度传感器程序调试 ....................................... 36 4.2.5 通讯子程序调试 ........................................... 38 4.3 本章小结 (39)第五章液位测量精度的提高和误差分析 (40)5.1 提高液位测量精度的主要方法 ................................. 40 5.1.1 温度测量 ................................................. 40 5.1.2 算术平均滤波 ............................................. 45 5.2 误差分析 ................................................... 47 5.3 本章小结 (48)总结 (49)3上海师范大学信机学院毕业设计第一章绪论1.1 课题背景1.1.1 超声波液位仪的研究背景与内容超声波液位仪作为一种典型的非接触测量仪器,在很多场合有广泛的应用,诸如工业自动控制,建筑工程测量和水面高度测量等方面。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
超声波液位测量系统设计阳华忠孙传友长4女学电,;学M4¨025鞭蛹隧鞠獬黼黜裂簿螽缓灏醺戳黼{t*t☆sPcEoBl^女m●^‰,LMl812≈,《{目^《tE“&”^#&*雎*t{《.*#自&m£i”1“女T一**¨t《,”‘f#十∞}m*.mtT≈,《ttt湿度.*^.B§f#境目t*Ⅻt十¥∞#自.tm7}#《*目^#^*&镕■t十来目f&.#^i&&■t¨#*t.豳■蕾鞠积整黼燃霸麟醐黼}E#.}m*,《’女;LMlB121引言n【】__超市披挂求班}K迅速.4、M渗墟刮*个镯域.¨仃军¥Ⅸ玎驯缭婶冉IIii#8有rL£的“川.漓f±☆1删*和托M也址日常t僻巾十最盛的邻j域+披ft的删*片证卉他毒。
恻如羞Ⅲ往洲n液俺U锌“,删屉池位,赳胜补偿趟自浊扯删量池似等等m采邢t些方法会J、腰劣∞环境和抽悼峦‘£的坐化给删*带m#k的瞄莘…毕“;fm悼具有蝇蚀什…嘲蚀删抽越^¨埘I№-陋,奉&计性出r坫f浮rn0磐【匕浊ms},cl,∞l^.1…单Jt扎LMl8l二越r々渡々m推成,0片#【f占,l的古洼自g{kI。
硅U越。
水《统可蒜性-≈.近H1fj:%精度高。
2参比法液位测量原理警比洼H娘理是利用超}"往换能8发一¨110趟-;浊忸冲]Ⅲ过’Ln《传播0g鹰崔ft转^的并【日处掰成fi针日睦f々到搀能*片搏M接收。
精Ⅲ忧5超声被¨垃日十纠挡牧自坩_{,J就“J眦牯确地计算Ⅲ随Ⅻ4披体的触协。
其原H圳Ⅵl,j超声藏#射Ji掳4£趟十波∞传感*就鼻m趺控憧剑州柬m泄f:号求…濉足“枉准环处r“生的删∞帅时问为【o。
B求H“#是I_I_泞r灶产’p的,删址的时问山r6掉F陆触洲浦傩的披1Ⅳ峦fLm坐化超J:一被“行早以j,的7L秆m。
…々播。
山十越钠【d的j{罐中1怍,超F*纠K,*q■fJ}”}千肌蛳的琏鹰+H‘÷,山ft可得咖}P止巾vf)是超,r漓到拉准环∞迹Ⅱ。
V是超声涟刊iTr顺_fii自0Jl嚏.“r“推111:ⅢJ+H一=_』胜艟Ⅻ目演津的液化-¨】|0_hd}r=H卜坐1一dl^・hH是储删砝液体的涟nh-挂地奇被传晦%爿存*睡带的m离;h是超■被心堪*Ⅻ",琐部的H捕.酒过删%的时州“弹其值・ho是超声被f々盛*判}tt*M一的啦离.一q椒擗址日】肫m】稠整棱挂环的r*度;d是泞r项而刊油自帕*离。
m此”rⅢ删址日f々出#艘∞谴虚£芏*仃枉州温睦m鹿,≮H描{啊超Jh挫∞速疃拚呆统带沫舶m菇。
法i坑錾盛观J#功矩{【l减少i统琨蕈麓世gm满Mmr要求苴Mt管的底口・‘o№删f&体连通恒f*删陂似进^【I|II最昔:¨’,浮于的密度90川、T触目哺体的密嘘.JL汗子具备托惭蚀忡;其。
,抟c*环_胛丁^选有利于起}*i川nⅡ“抖;】lH,Ⅲl量管录I¨抗腐蚀忡蝗的十诱钢村料.囤1臆理犀3硬件原理电路牟系统纳简嘤碰什}b路¨RI!.性自f和拄牧Ⅻ什电路目ⅢIM1s11趟■胜々…鞋成oI_l。
M1sl二硅种既能K进《能接性超声波的0H呆¨』适块鞋戍,,l以简ft№m“牿提高{统的一,J稚性。
0l-内郫乜拈:胩f-p州制c生妊落#,,*增&接收∞,脉冲啁,¨拴删#啭自抑制≈,‘j8%【☆j自电。
Fn、f.1MI812处于发时模式.箱】符嘟外拄c1lik亡m瞎的世蚶矗摊投的[怍撷牛LlCI扳蒿增蚰被憾为振荡醺走,振荡信≈!{驱r女坡★后,M13管wⅡ6管脚输m。
’_8管Ⅷ为Ⅱl“平时.iMl8l!处于拉收懊文,趣声踺1々媾g摇收“连日的衄市披1j号%电彝耦仟…4符脚输^再经内郫哺级般^艘凡岳的f;}轴U】管删的喈扳日路取出的竹母起送剑幢删£.目时竹檗F一也披捡删,-4“通过l7管W外接的电料进行滤眭。
’1管M【L的电Ⅲ盘拜小州*能触牲怪Ⅻ蝌祝j,器&蜒蚓簋T转¥”IⅢ”圉3主程序流程圈图2简要磋件电路目音过程【h"%管秉川IdealswILcll掉块,法横块拧制极为H便,山Hf】极的愿辑{£忐决定导迎或靓止,撤据这个特点”f采用P“女Gee蚶ator模块控制苴fJ撤。
根据一柏析式№变电路封特点,r【lsec…tor填址目脚礁∞O0女俅_t宽度陛为5m々.报惭妯发口f到柬确定#延时时Ⅷ。
仿巍过秤中军川蛮步k∞odcl5s算法。
f口AIm”“步完成,廿先逆变ob路摇摇腿JB联结∞一柑对称饥载H析输出波《c第步,*变电路接.相#步电动机现察J#n动过程中电涟&转述变化W与拒,相I撷【・弦渡『啪心动l』程扣比轻{协盘髓型I目睹,,f向作者索取)诈#}m绪绝。
4仿真分析-b压犁?柏桥止世空电路的T作法《“目2Ⅱ目3所m。
UUL艘《H中可看出女Ⅳ仉拽E的相电艇披肜是l#0Ⅲm对称的衙梯池;2扣m载电ⅢH1也#j苹l20’,■讥救线电压^I20时你的矩形被。
目4挂剌川=相r颇Ⅲ*波‘U撩带一扣#步电动月Lnz女缱程巾在rtU流的变化规律,m目5垲粜硐电压型二相侨大道变电源的情况。
通往时喇目的比较发现,电动机龙卉曲过挫rl啶}rb流的变化觇律州姒,f目的是选判。
F跫运行后.・相桥戒世变电拼由r托lh压输出敞彤巾禽有l*泼"n圳此式rb施艘动较凡。
目6和H7”…足:}¨J频“能皱电埠_f世立IU潦下}U劬"L启动过程的转速变化H。
U造阿十㈨L”析.一者n:轱迎立化觇难h雏书投,lb曲HL下豫运衍后转速郡f阿,小池讪.IⅢ_』转速Ii¨也月5比较Fn,造岜说叫逆监电源带电动机运{,对#进影响小A。
5结论迪过仿A研究2相桥武逆变电源电Ⅲ输m谴肜剐女tE渡变化的日・彤池,裔奋宅帕情波"钍,这些谐照"缸对电动机的定f电流产‘l三鞋夫影响而耐转速基奉没有影响。
奉空怍者的创新点“・棚桥式逆喹电路进行rf自真,"忻r拜电m输卅№彤Jf与。
棚1.颧j・镕渡电滁{*电动机r:功过程的性能1.进行r比较,仿真结果非常直观为扣矫式逆立电路的R叶提供丁啦旺方“.。
鞭鞫■酾蛾鼎醛黼躺黼黼霸赚Ⅲ目≈#i蝙t机A拖自“机械Im女版n1094.555i’545Ⅲ[2】年£宇i#善f州rL^B/#憎*的{纯口真拉术与应目20。
2.2日6面’5¨i(3】f聪明.丰晓竹忡Jw在三自异步电自机短路堵特*齄十∞盅用凹徽计算机信惠2004,e.略7{‰口自19754l2月&*目2004#末南大学礅±ⅢR§毕Ⅲ现☆竞&日怅H&技¥学院自子与电气18§E&.镕春■女1日75¥4月口讲%2005年车南大学日±*兜±¥Ⅱ瑰在克#日*自mn&¥#R电}与电气Ig*任#.d‘上接#}柏再度曼山的状志F解际冉求。
消除应∞叶的温Jl应该比模J‘的目^}H度假100℃。
进样T币于使摸具刊软化。
323HmT自际2J几川缸Ⅲ群抛北a次川∞婴轻。
j]提高垭瘦打脚干防止P生拈应和¨坑钢材的目唯点随碰鹰提高ln】提高如目2所Ⅲ。
田山5t冉对自q柑所施加的Jt力尢J=№服血干…耻精度。
崮此,q“通过提高幔}}碰度,使摸J}能承受更^们m^m十…观枯皮.脾坑也陆Ⅲ鹰的键旆而减少。
“此謦硪模具由于表面鞍硬一rUf2刮很奸的抛光性能;鲺化得蚪的樘H在抛光】』崔巾也不会J“,k桔皮和麻坑。
4结束语当采用,』^的Ⅱ^抛光时其±S果是引起桔应和麻坑。
如采川rJ.抛光的模具则m少m理特止Ⅻ晦坑。
川此乘坩手I抛把,目然耗费*力}岍f…,“缸救都能斟到忧良的横H矗面,所H抛光重要的¥料模H走而较粟Ⅲ手_.抛光.而采川凯挑抛光时叫*须使川合近的』K山,避免H现竹应和麻坑。
为r提岛模其的抛光fl:能可“*川浩《渗鲺的疗池提高模具碰鹰.减少帖J£和%坑的卅脱。
;篙害:嚣誉嚣韫燃住。
“1处^:筮射模式时.浒一级放太∞奎自动断".目!rI-懂纯I肝H∞简翌啦片凯接口电路q.超p涟世目}Ⅻ接收壮志挣刹端山雌H肌控制,接收悻冲的捡硎输出端杜到毕}tHL的≈目蚪・断u。
教懈轧小部H秉川Lcl)缸,F耗电小.连线简单,RⅢ数据%★。
4系统软件设计流程囤㈨3曲系统软件流程目。
奉系统需要删#的M十尘壁就屉To和T。
sPcF0Ⅲ^f郭l舡片机捉¨啊个定时川数*T…^^mn*m.舒B』m来…&憧准坏”a目的超i拉fj号所HJ的时问Tu.浮于处m目的超声M情号所川的时酬】。
把Ⅲ1Ⅱ的时删%致谢处理,¨算小城Ⅻ4置被体的液位|【。
再硼ⅢIcnR—FT程序。
5结束语本馒计一Ⅱ凡存连线刹拭液位的功能.mⅡ利川睦趟卢浊删靠挫避免了外界环境对翘^泄声述的影响而F生的i*蒂。
*外采JH超声波々川集战芯片I,M1812,幢#电路简单等特点。
蛙系统M造台F密封窑≈的液博测量.时敞L】的窑≈也适侍。
当艟洲液体且有脯铀性埘.可以避免趟声波传媾*腐蚀性液体直接接触.丰&统划量精度自,适…范ⅢJ_。
霸啊鼬嘲躔嘲龋嘲龋融秘嘲fI】蒋越i,it熙,孛琏童午自桂堆起声波液位w量的研宄(J】机城In自琦化t∞6,1嘲:54—42㈣日景i,i牛海.事立宝.超声波№埠液Ⅱ捌量杖{劬现代电干牡¥2000.摹7期旺川}[引方佩敏起声袁专用集成电路LMl8I2的雌g与虚用t干世年}9%^『4】"砖点,韩晓斌璃著岳*技术基础n京电f1业女版扯200B年【5】,i非璃}碴口1BⅡ单R机应用§日#京:北京札i抗£女荦女艟n2∞5}璃强觥蕊蹶髓魏蛹嘲蛹黼撩蝴目49车科*Ⅱ^学电信息学院t}信息18**£#&《±±g"*Ⅱ^≠自镕^¥%.。