DS第二章-课后习题答案
微分几何梅向明黄敬之编第二章课后题答案
第二章曲面论§ 1曲面的概念1.求正螺面7 ={ u cosv ,u sinv, bv }的坐标曲线.解 u-曲线为 r={u cosv o ,u sin v o ,bv o }= {0,0 , bv °} + u { cosv o , sin v °,0},为曲线的直母线;v- 曲线为?={u o cosv , U o sinv,bv }为圆柱螺线.2 .证明双曲抛物面r ={ a (u+v ) , b (u-v ) ,2uv }的坐标曲线就是它的直母线。
证 u-曲线为 r={ a (u+v o ) , b (u- v o ) ,2u v o }={ a v °, b v °,0}+ u{a,b,2 v o }表示过点{ a v °, b v °,0} 以{a,b,2 v o }为方向向量的直线;v-曲线为 r = {a ( u o +v ) , b ( u o -v ) ,2 u o v } = {a u °, bu o ,0 } +v{a,-b,2 u o }表示过点(a u o , bu o ,0)以{a,-b,2 u o }为方向向量的直线3. 求球面r={acos ;:sin , a cos' sin :, asi n ;:}上任意点的切平面和法线方程。
解 r 、={—asin 、:cos ;—asin ;sin 「,acos :} , r .:={—acos ; sin :, acos L cos ,0}即 xcos : cos + ycos : sin + zsin 二-a = 0 x - a cos 、: cos : _ y - a cos :: sin : _ z - a sin 二 cos 、: cos : cos 、: sin ' sin 二2 24 .求椭圆柱面 务•岭=1在任意点的切平面方程,并证明沿每一条直母线,此曲面只有一个切平面a bx 「a cos 、: cos ‘ 任意点的切平面方程为 -a sincos :-a cos 二 sin :y -a cos ;: sin ‘ -asin 二 sin : z - a s in 9 a cos^ = 0法线方程为§2曲面的第一基本形式1. 求双曲抛物面r ={ a (u+v ) , b (u-v ) ,2uv }的第一基本形式 解 r u ={a,b,2v}, g 二{a,-b,2u}, E =打=a 2 b 2 4v 2,F = r u r v = a 2- b 24uv, G = r v 2二 a 2b 24u 2,1 = (a 2b 24v 2)du 22(a 2-b 24uv)dudv (a 2b 24u 2)dv 2。
数字图像处理第二章课后习题及中文版解答

数字图像处理(冈萨雷斯版,第二版)课后习题及解答(部分)Ch 22.1使用2.1节提供的背景信息,并采用纯几何方法,如果纸上的打印点离眼睛0.2m 远,估计眼睛能辨别的最小打印点的直径。
为了简明起见,假定当在黄斑处的像点变得远比视网膜区域的接收器(锥状体)直径小的时候,视觉系统已经不能检测到该点。
进一步假定黄斑可用1.5mm × 1.5mm 的方阵模型化,并且杆状体和锥状体间的空间在该阵列上的均匀分布。
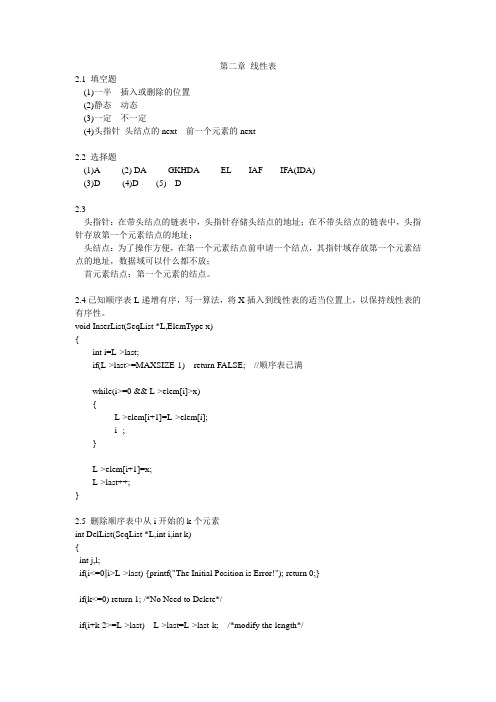
解:对应点的视网膜图像的直径x 可通过如下图题2.1所示的相似三角形几何关系得到,即()()220.20.014d x = 解得x =0.07d 。
根据2.1节内容,我们知道:如果把黄斑想象为一个有337000个成像单元的正方形传感器阵列,它转换成一个大小580×580成像单元的阵列。
假设成像单元之间的间距相等,这表明在总长为1.5 mm 的一条线上有580个成像单元和579个成像单元间隔。
则每个成像单元和成像单元间隔的大小为s =[(1.5 mm)/1159]=1.3×10-6 m 。
如果在黄斑上的成像点的大小是小于一个可分辨的成像单元,在我们可以认为改点对于眼睛来说不可见。
换句话说,眼睛不能检测到以下直径的点:x =0.07d<1.3×10-6m ,即d <18.6×10-6 m 。
下图附带解释:因为眼睛对近处的物体聚焦时,肌肉会使晶状体变得较厚,折射能力也相对提高,此时物体离眼睛距离0.2 m ,相对较近。
而当晶状体的折射能力由最小变到最大时,晶状体的聚焦中心与视网膜的距离由17 mm 缩小到14 mm ,所以此图中选取14mm(原书图2.3选取的是17 mm)。
图 题2.12.2 当在白天进入一个黑暗的剧场时,在能看清并找到空座位时要用一段时间适应,2.1节(视觉感知要素)描述的视觉过程在这种情况下起什么作用?解:根据人眼的亮度适应性,1)由于户外与剧场亮度差异很大,因此当人进入一个黑暗的剧场时,无法适应如此大的亮度差异,在剧场中什么也看不见;2)人眼不断调节亮度适应范围,逐渐的将视觉亮度中心调整到剧场的亮度范围,因此又可以看见、分清场景中的物体了。
电磁场与电磁波理论基础 第二章 课后答案
1 q1 q2 u (r ) = + 4πε 0 R1 R2
式中
+q
Z
P ( x, y,z )
R1
r
r2
o
R2
R1 = r - r1 = ( x + a ) e x + ye y + e z R1 = ( x + a ) + y 2 + z 2 R 2 = r - r2 = ( x - a ) e x + ye y + e z R2 = ( x - a ) + y 2 + z 2
②当 a <
ρ < b ,此时 Q = 2π al ρ S1 ,由高斯定理可得
D ⋅ dS = 2π l ρ Dρ = Q = 2π al ρ
(S )
S1
Dρ =
a ρS1
ρ
D =
a ρS1
ρ
eρ
E =
a ρS1
ε0ρ
eρ
③当 ρ > b ,此时高斯面内的 Q = 2π al ρ S 1 + 2π bl ρ S 2 ,由高斯定理可得
代入得到
2 2
2
2
é ù 1 ê 8 (4e x - 4e z ) 4 (4e x - 4e y ) ú ê ú E (r ) = 3 3 ú 4pe 0 ê 4 2 4 2 êë úû 1 ée x + e y - 2e z ù = ê ûú 32 2pe 0 ë
(
)
(
)
2-7.一个点电荷+q 位于(-a, 0, 0)处,另一点电荷-2q 位于(a, 0, 0)处,求电位等于零的 面;空间有电场强度等于零的点吗? 解 根据点电荷电位叠加原理,有
微机原理第二章习题参考答案

微机原理第二章习题参考答案微机原理第二章作业参考答案:1.(2字节)a.指由8个二进制位组成的通用基本单元(6时钟周期)b.是cpu指令执行时间的刻度(10软件配置管理空间)c.cpu所要出访的存储单元数,与cpu地址总线条数有关(11实际地址)d.唯一能代表存储空间每个字节单元的地址,用5位16进制数表示(7总线周期)e.cpu执行访问存储器或i/o操作所花时间(12逻辑地址)f.由段基址和段偏转地址共同组成,均用4十一位16十进制则表示(4基本指令继续执行时间)g.指寄存器乘法指令继续执行所花掉时间(3指令)h.顺利完成操作方式的命令(1字长)i.指cpu在交换、加工、存放信息时信息位的基本长度(5指令执行时间)j.各条指令执行所花时间,不同指令值不一(8cache)k.为减轻cpu与主存储器间互换数据的速度瓶颈而建立的高速缓冲存储器(9虚拟存储器)l.cpu执行程序时看见的一个速度吻合内存却具有外存容量的假想存储器2.(1)mhz频率单位,可以用来表示cpu的主频1mhz=1000000hz(2)ghz频率单位,可以用来表示cpu的主频1ghz=1000000000hz(3)μs时间单位,可以用来表示基本指令执行时间1μs=10s(4)mips每秒百万条指令,用来表示基本指令执行速度(5)kb用以则表示存储器容量、软件配置管理空间或者存储空间的一种单位1kb=2bytes(6)mb用以则表示存储器容量、软件配置管理空间或者存储空间的一种单位1mb=2bytes(7)gb用以则表示存储器容量、软件配置管理空间或者存储空间的一种单位1gb=2bytes(8)tb用以则表示存储器容量、软件配置管理空间或者存储空间的一种单位1tb=2bytes3.eu的共同组成部件:(3)alu(7)状态标志寄存器(9)掌控单元(12)通用寄存器组与biu的共同组成部件:(1)地址部件au(2)段界检查器(4)20十一位地址产生器(5)20十一位物理地址加法器(6)指令队列(8)总线掌控逻辑(10)段寄存器组(11)指令指针4.标志sf(b符号标志)cf(d位次标志)af(h辅助位次标志)df(i方向标志)tf(a陷阱标志)of(c外溢标志)pf(f奇偶标志)if(g中断容许标志)zf(e零标志)类型sssccsscs为0时则表示的状态两个带符号数运算结果就是正数两个并无符号数经alu运算后并无位次或者借位产生两个数运算时,两个高4十一位运算并无位次或者借位产生数据串成操作方式的增量地址为自动递减正常调试两个带符号数运算后没产生外溢运算结果数据高8位中二进制存有奇数个1中断屏蔽数据运算时结果不为零403020?6107.首地址pa=62d87h末地址pa=62d87h+28h(则表示40字节)-1h=62daeh8.实际地址:99a40h9.实际地址:3ba00h10填写下列个状态下的有效信号状态总线操作类型t1t2t3t4最小模式下总线存储器读操作最小模式下总线存储器写操作11.特点方式最小模式最大模式12.00130h:00131h:00135h:00136h:13.0dah31h7fh5ehmn/mx引脚高电平低电平处理器个数12个以上总线控制信号的产生8086828834h00230h:2dh00231h:0abh00232h:00233h:67h14.55h00330h:20h00331h:00332h:45h00333h:20h00334h:53h00335h:20h00336h:54h00337h:20h00338h:43h15.(1)ds:11a7es:11a7ss:21becs:31b8ds,es段顶:11a70hss段顶上:21be0hss段底:22ca8hcs段顶上:31b80hds,es段底:21a6fhcs段底:41b7fh(2)of=0df=0if=1sf=0zf=0zf=0pf=0cf=016.5ch20a28h:00h20a29h:7ah20a2ah:20a2bh:20a2ch:20a2dh:20a2eh:20a2fh:20a30h:20a31h:53h42h0ffh12h00h5bh0ah入栈完毕时,(ss)=20a0h(ip)=0028h17.8086系统中:(1)8284a时钟产生器的作用是:为8086cpu提供时钟,产生cpu所需的系统时钟信号(2)8282/8283地址锁存器的作用是:锁存8086地址总线中的信息(3)8286/8287总线收发器的作用是:传送8086数据总线中的信息(4)8288总线控制器的促进作用就是:在最小工作模式下产生8086系统所需的掌控信号18.8086寻址i/o端口时,使用16条地址线,可寻址32k个字端口,或64k个字节端口。
电磁场与电磁波(第四版)课后答案_谢处方_第二章习题 2

2.10 一个半圆环上均匀分布线电荷 ,求垂直于圆 平面的轴线z=a处的电场强度,设半圆环的半径也为a。
解:
dq ldl ', dl ' a d ',
dE
R eza era a(ez ex cos ' ey sin '),
E r
l 4 0
c
R R3
dl
'
a
l
40
(ez ex cos ' ey sin ')a2 d '
的磁感应强度,并证明空腔内的磁场是均匀的。
解:将题中问题看做两个对称电流的叠加:
一个是密度为 J 均匀分布在半径为 b
的圆柱内,另一个是密度为 J 均匀
b
分布在半径为 a 的圆柱内。 a
由安培环路定律在 b 和 a 中分布的
d
磁场分别为
0 2
J
b
b b
Bb
0b2 J b 2 b2
b b
0
q(ex x ey y (x a)2
ez z exa)
y2
z2
3/ 2
2q(ex x ey y ez z exa)
(x
a)2
y2
z2
3/ 2
0
由此可得个分量为零的方程组:
q(x
a)
(x
a)2
y2
z2
3/ 2
2q(x
a)
(x
a)2
y2
z2
3/ 2
0
qy
(
x
2
a)2
y2
z2
3/ 2
2qy
解:(1)
d
q (r ) d 0 (r ) s dx
微型计算机原理与接口技术第二章课后答案
第二章 1. 8086CPU内部由哪两部分组成?它们的主要功能是什么?答:8086CPU 内部由执行单元 EU 和总线接口单元 BIU 组成。
主要功能为:执行单元 EU 负责执行指令。
它由算术逻辑单元(ALU)、通用寄存器组、16 位标志寄存器(FLAGS)、EU 控制电路等组成。
EU 在工作时直接从指令流队列中取指令代码,对其译码后产生完成指令所需要的控制信息。
数据在 ALU 中进行运算,运算结果的特征保留在标志寄存器 FLAGS 中。
总线接口单元 BIU 负责 CPU 与存储器和 I /O 接口之间的信息传送。
它由段寄存器、指令指针寄存器、指令队列、地址加法器以及总线控制逻辑组成。
2. 8086CPU 中有哪些寄存器?各有什么用途?答:8086CPU 内部包含4组16位寄存器,分别是通用寄存器组、指针和变址寄存器、段寄存器、指令指针和标志位寄存器。
(1)通用寄存器组 包含4个16位通用寄存器 AX 、BX 、CX 、DX ,用以存放普通数据或地址,也有其特殊用途。
如AX (AL )用于输入输出指令、乘除法指令,BX 在间接寻址中作基址寄存器,CX 在串操作和循环指令中作计数器,DX 用于乘除法指令等。
(2)指针和变址寄存器 BP 、SP 、SI 和DI ,在间接寻址中用于存放基址和偏移地址。
(3)段寄存器 CS 、DS 、SS 、ES 存放代码段、数据段、堆栈段和附加段的段地址。
(4)指令指针寄存器IP 用来存放将要执行的下一条指令在现行代码段中的偏移地址。
(5)标志寄存器Flags 用来存放运算结果的特征。
3. 8086CPU 和8088CPU 的主要区别是什么?答:8088CPU 的内部结构及外部引脚功能与8086CPU 大部分相同,二者的主要不同之处如下:(1)8088指令队列长度是4个字节,8086是6个字节。
(2)8088的BIU 内数据总线宽度是8位,而EU 内数据总线宽度是16位,这样对16位数的存储器读/写操作需要两个读/写周期才能完成。
DS第二章_课后习题答案
第二章线性表2.1 填空题(1)一半插入或删除的位置(2)静态动态(3)一定不一定(4)头指针头结点的next 前一个元素的next2.2 选择题(1)A (2) DA GKHDA EL IAF IFA(IDA)(3)D (4)D (5) D2.3头指针:在带头结点的链表中,头指针存储头结点的地址;在不带头结点的链表中,头指针存放第一个元素结点的地址;头结点:为了操作方便,在第一个元素结点前申请一个结点,其指针域存放第一个元素结点的地址,数据域可以什么都不放;首元素结点:第一个元素的结点。
2.4已知顺序表L递增有序,写一算法,将X插入到线性表的适当位置上,以保持线性表的有序性。
void InserList(SeqList *L,ElemType x){int i=L->last;if(L->last>=MAXSIZE-1) return FALSE; //顺序表已满while(i>=0 && L->elem[i]>x){L->elem[i+1]=L->elem[i];i--;}L->elem[i+1]=x;L->last++;}2.5 删除顺序表中从i开始的k个元素int DelList(SeqList *L,int i,int k){int j,l;if(i<=0||i>L->last) {printf("The Initial Position is Error!"); return 0;}if(k<=0) return 1; /*No Need to Delete*/if(i+k-2>=L->last) L->last=L->last-k; /*modify the length*/for(j=i-1,l=i+k-1;l<L->last;j++,l++)L->elem[j]=L->elem[l];L->last=L->last-k;return 1;}2.6 已知长度为n的线性表A采用顺序存储结构,请写一时间复杂度为O(n)、空间复杂度为O(1)的算法,删除线性表中所有值为item的数据元素。
《微型计算机系统原理及应用》课后答案_(第3版)清华大学出版社__杨素行
第一章 微型计算机基础题1-1 计算机发展至今,经历了哪几代?答:电子管计算机、晶体管计算机、集成电路计算机、超大规模集成电路计算机、非冯诺伊曼计算机和神经计算机。
题1-2 微机系统由哪几部分组成?微处理器、微机、微机系统的关系是什么? 答:1、微机系统分硬件和软件,硬件包括CPU、存储器、输入输出设备和输入输出接口,软件包括系统软件和应用软件。
2、微处理器是指微机的核心芯片CPU;微处理器、存储器和输入输出设备组成微机;微机、外部设备和计算机软件组成微机系统。
题1-3 微机的分类方法包括哪几种?各用在什么应用领域中?答:按微处理器的位数,可分为1位、4位、8位、32位和64位机等。
按功能和机构可分为单片机和多片机。
按组装方式可分为单板机和多板机。
单片机在工业过程控制、智能化仪器仪表和家用电器中得到了广泛的应用。
单板机可用于过程控制、各种仪器仪表、机器的单机控制、数据处理等。
题1-4 微处理器有哪几部分组成?各部分的功能是什么?答:微处理器包括运算器、控制器和寄存器三个主要部分。
运算器的功能是完成数据的算术和逻辑运算;控制器的功能是根据指令的要求,对微型计算机各部分发出相应的控制信息,使它们协调工作,从而完成对整个系统的控制;寄存器用来存放经常使用的数据。
题1-5 微处理器的发展经历了哪几代?Pentium系列微处理器采用了哪些先进的技术?答:第一代4位或低档8位微处理器、第二代中高档8位微处理器、第三代16位微处理器、第四代32位微处理器、第五代64位微处理器、第六代64位高档微处理器。
Pentium系列微处理器采用了多项先进的技术,如:RISC技术、超级流水线技术、超标量结构技术、MMX技术、动态分支预测技术、超顺序执行技术、双独立总线DIB技术、一级高速缓冲存储器采用双cache结构、二级高速缓冲存储器达256KB或512KB、支持多微处理器等。
题1-6 何为微处理器的系统总线?有几种?功能是什么?答: 系统总线是传送信息的公共导线,微型计算机各部分之间是用系统总线连接的。
数字图像处理第二章课后习题及中文版解答
数字图像处理(冈萨雷斯版,第二版)课后习题及解答(部分)Ch 22.1使用2.1节提供的背景信息,并采用纯几何方法,如果纸上的打印点离眼睛0.2m 远,估计眼睛能辨别的最小打印点的直径。
为了简明起见,假定当在黄斑处的像点变得远比视网膜区域的接收器(锥状体)直径小的时候,视觉系统已经不能检测到该点。
进一步假定黄斑可用1.5mm × 1.5mm 的方阵模型化,并且杆状体和锥状体间的空间在该阵列上的均匀分布。
解:对应点的视网膜图像的直径x 可通过如下图题2.1所示的相似三角形几何关系得到,即()()220.20.014d x = 解得x =0.07d 。
根据2.1节内容,我们知道:如果把黄斑想象为一个有337000个成像单元的正方形传感器阵列,它转换成一个大小580×580成像单元的阵列。
假设成像单元之间的间距相等,这表明在总长为1.5 mm 的一条线上有580个成像单元和579个成像单元间隔。
则每个成像单元和成像单元间隔的大小为s =[(1.5 mm)/1159]=1.3×10-6 m 。
如果在黄斑上的成像点的大小是小于一个可分辨的成像单元,在我们可以认为改点对于眼睛来说不可见。
换句话说,眼睛不能检测到以下直径的点:x =0.07d<1.3×10-6m ,即d <18.6×10-6 m 。
下图附带解释:因为眼睛对近处的物体聚焦时,肌肉会使晶状体变得较厚,折射能力也相对提高,此时物体离眼睛距离0.2 m ,相对较近。
而当晶状体的折射能力由最小变到最大时,晶状体的聚焦中心与视网膜的距离由17 mm 缩小到14 mm ,所以此图中选取14mm(原书图2.3选取的是17 mm)。
图 题2.12.2 当在白天进入一个黑暗的剧场时,在能看清并找到空座位时要用一段时间适应,2.1节(视觉感知要素)描述的视觉过程在这种情况下起什么作用?解:根据人眼的亮度适应性,1)由于户外与剧场亮度差异很大,因此当人进入一个黑暗的剧场时,无法适应如此大的亮度差异,在剧场中什么也看不见;2)人眼不断调节亮度适应范围,逐渐的将视觉亮度中心调整到剧场的亮度范围,因此又可以看见、分清场景中的物体了。
《信号与系统分析基础》第二章部分习题参考答案

第二章部分习题参考答案2-6 试求下列各函数1()f t 与2()f t 之卷积。
121212(-)01(1) ()() ()() (0) ()()()(-) ()(-)11(1) 0(2) ()t tt t tt t f t u t f t e u t f t f t f f t d u eu t d e e d e e e t f t ααταατααταατττττττααδ-+∞-∞+∞---∞--==>*===⋅=⋅=-≥=⎰⎰⎰,解:,2121212() ()cos(45)()()()cos[()45] cos(45)(3) ()(1)[()(1)] ()(1)(2) ()()t f t t f t f t t d t f t t u t u t f t u t u t f t f t ωδτωττω+∞-∞=+*=-+=+=+--=---*⎰,解:,解:ττ222221211211()(-1)(-1)-2(-2)(-2)(-1)(-1)-(-2)(-2)2211-(-2)(-2)(-3)(-3)-(-2)(-2)(-3)(-3)22()*()()1,()0123, (1-)(1)21(1)--(12ttf t t u t t u t t u t t u t t u t t u t t u t t u t f t f t f t t f t t t dt t ft t t t τττ=+++=<=<<+=+-=++⎰222-112222212111)-222123, (1-)(1)-221()2(1)-2(1-)(-1)211121---152223, ()*()0.t t t t t t d t f t t t t t t t t t t t f t f t ττττ-+=<<+=+=+++=+++=++>=⎰121221--(4) cos , (1)-(-1)()*()()(-) [(1)-(-1)][cos(-)] cos[(1)]-cos[(-1)]f t t f t t t f t f t f f t d t t t d t t ωδδτττδδωττωω+∞∞+∞∞==+==+⋅=+⎰⎰ -212-212--2-220(5) ()(), ()sin ()()()*()()sin(-)(-) sin(-)sin t t ttt tf t e u t f t t u t f t f t f t e u t u t d e t d ee d τττττττττ+∞∞==⋅==⋅⋅⋅=⋅=⋅⎰⎰⎰-12-(-)--0022-(-)-33-2-3(6) ()2[()-(-3)], ()4()-(-2)0, ()0.02,()2488-825, 88()8(-)5, ()0.t tt t t tt t t t t f t e u t u t f t u t u t t f t t f t e d e e e t ft ed ef t e e e t f t ττττττ-==<=<<==⋅=<<===>=⎰⎰2-8 求阶跃响应为32()(21)()t t s t e e u t --=-+的LTI (线性时不变)系统对输入()()t x t e u t =的响应。
微型计算机原理作业第二章习题与思考题

第二章第二章 习题与思考题习题与思考题一、填空题:1.1. 8086 CPU 内部数据总线宽度为内部数据总线宽度为__________________位,外部数据总线宽度为位,外部数据总线宽度为位,外部数据总线宽度为__________________位。
位。
位。
2.2. 8088 CPU 内部数据总线宽度为内部数据总线宽度为__________________位,外部数据总线宽度为位,外部数据总线宽度为位,外部数据总线宽度为__________________位。
位。
位。
3.3. 8086 CPU 地址总有地址总有____________位,寻址范围是位,寻址范围是位,寻址范围是__________________________________________。
4.4. 8086 CPU 的编程结构一般为的编程结构一般为________ ____________ ____和______ ______两部分两部分. .5.5. SP 常称为常称为____________________________________,其位数为,其位数为,其位数为_________位,作用是位,作用是位,作用是____ ___________________ _______________。
6.6. CS 常称为常称为____________________________________,其位数为,其位数为,其位数为_________位,作用是位,作用是位,作用是________ ___________________ ___________。
7.7. IP 常称为常称为____________________________________,其位数为,其位数为,其位数为_________位,作用是位,作用是位,作用是___ ___________________ ________________。
8.8. FLAGS 常称常称____________________________________,其位数为,其位数为,其位数为_________位,作用是位,作用是位,作用是_______ __________ _______ __________。
第二章习题解答
第二章习题解答2.12.3答:⑴执行单元EU负责执行指令。
EU在工作时不断地从指令队列取出指令代码,对其译码后产生完成指令所需要的控制信息。
数据在ALU中进行运算,运算结果的特征保留在标志寄存器FLAGS中。
总线接口单元BIU负责CPU与存储器、I/O接口之间的信息传送。
BIU取出的指令被送入指令队列供EU执行,BIU取出的数据被送入相关寄存器中以便做进一步的处理。
⑵执行单元EU不能直接访问存储器2.4答:(1)要利用信号线包括WR#、RD#、IO/M#、ALE以及AD0~AD7、A8~A19。
(2)同(1)。
(3)所有三态输出的地址信号、数据信号和控制信号均置为高阻态。
2.5答:在每个总线周期的T3的开始处若READY为低电平,则CPU在T3后插入一个等待周期TW。
在TW的开始时刻,CPU还要检查READY状态,若仍为低电平,则再插入一个TW 。
此过程一直进行到某个TW开始时,READY已经变为高电平,这时下一个时钟周期才转入T4。
可以看出,插入TW周期的个数取决于READY电平维持的时间。
2.62.72.8通用寄存器包含以下8个寄存器:AX、BX、CX和DX寄存器一般用于存放参与运算的数据或运算的结果。
除此之外:AX:主要存放算术逻辑运算中的操作数,以及存放I/O操作的数据。
BX:存放访问内存时的基地址。
CX:在循环和串操作指令中用作计数器。
DX:在寄存器间接寻址的I/O指令中存放I/O地址。
在做双字长乘除法运算时,DX 与AX合起来存放一个双字长数。
SP:存放栈顶偏移地址。
BP:存放访问内存时的基地址。
SP和BP也可以存放数据,但它们的默认段寄存器都是SS。
SI:常在变址寻址方式中作为源地址指针。
DI:常在变址寻址方式中作为目标地址指针。
专用寄存器包括4个段寄存器:CS:代码段寄存器,用于存放代码段的段基地址。
DS:数据段寄存器,用于存放数据段的段基地址。
SS:堆栈段寄存器,用于存放堆栈段的段基地址。
第二章习题答案+补充习题+第三章习题以及答案

(1)Z=W+(Z+X)
(2)Z=W-(X+6)-(R+9)
(3)Z=(W*X)/(R+6)
(4)Z=((W-X)/5*Y)*2
解答:(1)Z=W+(Z+X)
题号
指令
题号
指令
(1) Z=W+(Z+X)
(2) Z=W-(X+6)-(R+9)
MOV MOV MOV ADD ADD MOV
AX,Z BX,X CX,W AX,BX AX,CX Z,AX
(1)MOV AX,0ABH
(2)MOV AX,[100H]
(3)MOV AX,VAL
(4)MOV BX,[SI]
(5)MOV AL,VAL[BX]
(6)MOV CL,[BX][SI]
(7)MOV VAL[SI],BX
(8)MOV [BP][SI],100
解答:
(1)MOV AX,0ABH 寻址方式:立即寻址;物理地址:无
POP
AX
DIV MOV MOV
CX Z,AX Z+1,DX
(4)
Z=((W-X)/5*Y)*2
MOV MOV SUB
AX,W BX,X AX,BX
MOV MOV
DX,0 CL,5
DIV
CL
MOV
BX,Y
MUL MOV
BX CL,2
MUL MOV MOV
CL Z,AX Z+1,DX
7.假定 DX=1100100110111001B,CL=3,CF=1,试确定下列各条指令单独执行后 DX 的值。
LEA SI,OLDS;
LEA SI,OLDS
大学物理(机械工业出版社)第二章课后答案

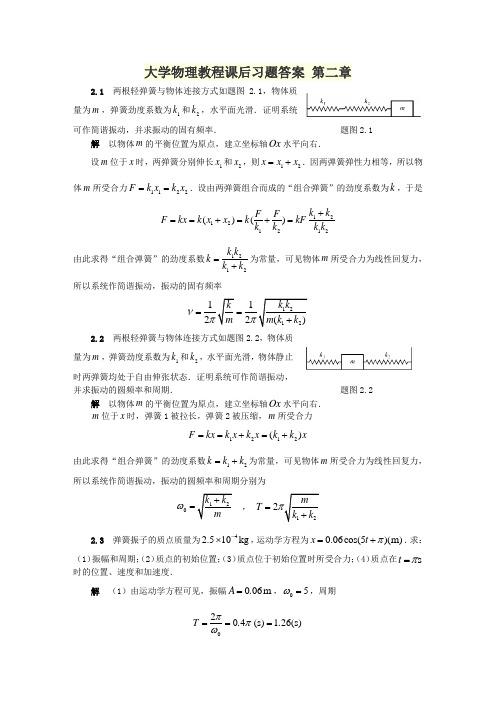
第二章 质点动力学2-1一物体从一倾角为30︒的斜面底部以初速v 0=10m·s -1向斜面上方冲去,到最高点后又沿斜面滑下,当滑到底部时速率v =7m·s -1,求该物体与斜面间的摩擦系数。
解:物体与斜面间的摩擦力f =uN =umgcos30︒物体向斜面上方冲去又回到斜面底部的过程由动能定理得220112(1)22mv mv f s -=-⋅物体向斜面上方冲到最高点的过程由动能定理得2010sin 302mv f s mgh f s mgs -=-⋅-=-⋅-2(2)s ∴=把式(2)代入式(1)得,220.198u =2-2如本题图,一质量为m 的小球最初位于光滑圆形凹槽的A 点,然后沿圆弧ADCB 下滑,试求小球在C 点时的角速度和对圆弧表面的作用力,圆弧半径为r 。
解:小球在运动的过程中受到重力G 和轨道对它的支持力T.取如图所示的自然坐标系,由牛顿定律得22sin (1)cos (2)t n dv F mg mdtv F T mg m Rαα=-==-=由,,1ds rd rd v dt dt dt vαα===得代入式(), A 并根据小球从点运动到点C 始末条件进行积分有,习题2-2图902n (sin )m cos 3cos '3cos ,e v vdv rg d v v rv mg mg rmg αααωααα=-===+==-=-⎰⎰得则小球在点C 的角速度为=由式(2)得 T 由此可得小球对园轨道得作用力为T T 方向与反向2-3如本题图,一倾角为θ 的斜面置于光滑桌面上,斜面上放一质量为m 的木块,两者间摩擦系数为μ,为使木块相对斜面静止,求斜面的加速度a 应满足的条件。
解:如图所示()1212min max sin ,cos cos sin (1)sin cos 2(1)(2)(sin cos )(cos sin )(sin cos )()(cos sin )1(2)(1)(sin cos )(cos sin )(sin cos a a a a N mg ma ma mg uN m a ma u g u a u g u g tg u a u utg u g u a u g u a θθθθθθθθθθθθθθθθθθθθθ==∴-==±==⨯+-=+--∴==++-⨯+=-+∴=得,得,)()(cos sin )1()()11g tg u u utg g tg u g tg u a utg utg θθθθθθθθθ+=---+∴≤≤+- 2-4如本题图,A 、B 两物体质量均为m ,用质量不计的滑轮和细绳连接,并不计摩擦,则A 和B 的加速度大小各为多少 。
DS第二章_课后习题答案教案资料
D S第二章_课后习题答案第二章线性表2.1 填空题(1)一半插入或删除的位置(2)静态动态(3)一定不一定(4)头指针头结点的next 前一个元素的next2.2 选择题(1)A (2) DA GKHDA EL IAF IFA(IDA)(3)D (4)D (5) D2.3头指针:在带头结点的链表中,头指针存储头结点的地址;在不带头结点的链表中,头指针存放第一个元素结点的地址;头结点:为了操作方便,在第一个元素结点前申请一个结点,其指针域存放第一个元素结点的地址,数据域可以什么都不放;首元素结点:第一个元素的结点。
2.4已知顺序表L递增有序,写一算法,将X插入到线性表的适当位置上,以保持线性表的有序性。
void InserList(SeqList *L,ElemType x){int i=L->last;if(L->last>=MAXSIZE-1) return FALSE; //顺序表已满while(i>=0 && L->elem[i]>x){L->elem[i+1]=L->elem[i];i--;}L->elem[i+1]=x;L->last++;}2.5 删除顺序表中从i开始的k个元素int DelList(SeqList *L,int i,int k){int j,l;if(i<=0||i>L->last) {printf("The Initial Position is Error!"); return 0;}if(k<=0) return 1; /*No Need to Delete*/if(i+k-2>=L->last) L->last=L->last-k; /*modify the length*/for(j=i-1,l=i+k-1;l<L->last;j++,l++)L->elem[j]=L->elem[l];L->last=L->last-k;return 1;}2.6 已知长度为n的线性表A采用顺序存储结构,请写一时间复杂度为O(n)、空间复杂度为O(1)的算法,删除线性表中所有值为item的数据元素。
【西安交通大学】【电介质物理】【姚熹、张良莹】【课后习题答案】【第二章】
【西安交通大学】【电介质物理】【姚熹、张良莹】【课后习题答案】【第二章】第二章变化电场中的电介质2-1 什么是瞬时极化、缓慢极化,它们所对应的微观机制代表什么,极化对电场响应的各种情况分别对何种极化有贡献,答案略2-2 何谓缓慢极化电流,研究它有何意义,在实验中如何区分自由电荷、束缚电荷随产生的传到电流,答案略2-3 何谓时域响应、频域响应,两者的关系如何,对材料研究而言,时域、频域的分析各由什么优缺点,答案略1,t/,2-4 已知某材料的极化弛豫函数,同时材料有自由电荷传ft,e(),导,其电导率为,求该材料的介质损耗角正切。
,tg,1,t/, 解 :由弛豫函数可知德拜模型 ft,e(),极化损耗,漏导损耗 tg,tg,GP如果交变电场的频率为 ; ,,,,,,()s, 则= tg,P22,,,,,s,,,,,1s, = ,tg,()G22,,,,,,10,该材料的介质损耗正切为:=+ tg,tg,tg,GP2-5 在一平板介质(厚度为d,面积为S)上加一恒定电压V,得,Vt 到通过介质的总电流为,已知介质的光频介电常数为 I,,,,e,求单位体积内的介质损耗、自由电子的电导损耗、极化 ,,弛豫与时间的关系。
若施加频率为的交变电场,其值又为多 , 23少,并求出介质极化弛豫函数f(t)。
解 :在电场的作用下(恒场)介质中的功率损耗即为介质损耗电功 dA,Vdq,VI(t)dtttVtVt,, A,VI(t)dt,(,,,e)Vdt,,Vt,,(1,e),,00,A,Vt W,,,V,,Ve,I(t)V,tW1,Vt 单位体积中的介电损耗 : w,,(,V,,Ve)dsdsV, 自由电子电导损耗 : w,1dsV,,Vt 极化弛豫损耗 : w,e,dsdVsV,,RI 电导率 :,,,,, , 0sR,d,Vt 电流 : I,,,,e其中为传导电流 I,,R,Vt 为极化电流 I,,erdQdsdP(),rrrIs 另一方面 ,,,rdtdtdt,,,EdP(,),t/,s,00r e,,dt,,,,E(),t/,,Vts,00 故 I,e,,er,1V2 有 ,,,E,,(,,,),sV,,ds,0Vd,d,, ,,s,2,sV0因而,加交变电场时 : w,,(,)s,,,,,, r,221,,,,,,,(,)s,,,,, 极化损耗 : 1r221,,,24,,d,,, 电导损耗 : ,,2r,,,,sV0022,,,,,(,)V120s,,,,,, 单位体积中的极化损耗功率 :W,E,01rr22222d(1,,,)V, 单位体积中的电导损耗功率 : W,GdsW,W,WrG1,t/,,Vt 弛豫函数 :f,e,Ve,1,t/,2-6 若介质极化弛豫函数,电导率为,其上施加电场 ,ft,e(), E(t)=0 (t<0);E(t)=at (t>0 , a为常数)求通过介质的电流密度。
大学物理课后习题答案 第二章
大学物理教程课后习题答案 第二章 2.1 两根轻弹簧与物体连接方式如题图 2.1,物体质量为m ,弹簧劲度系数为1k 和2k ,水平面光滑.证明系统可作简谐振动,并求振动的固有频率. 题图2.1 解 以物体m 的平衡位置为原点,建立坐标轴Ox 水平向右.设m 位于x 时,两弹簧分别伸长1x 和2x ,则12x x x =+.因两弹簧弹性力相等,所以物体m 所受合力1122F k x k x ==.设由两弹簧组合而成的“组合弹簧”的劲度系数为k ,于是12121212()()k k F F F kx k x x k kF k k k k +==+=+= 由此求得“组合弹簧”的劲度系数1212k k k k k =+为常量,可见物体m 所受合力为线性回复力,所以系统作简谐振动,振动的固有频率12121122()k k k m m k k νππ==+ 2.2 两根轻弹簧与物体连接方式如题图2.2,物体质量为m ,弹簧劲度系数为1k 和2k ,水平面光滑,物体静止时两弹簧均处于自由伸张状态.证明系统可作简谐振动,并求振动的圆频率和周期. 题图2.2 解 以物体m 的平衡位置为原点,建立坐标轴Ox 水平向右.m 位于x 时,弹簧1被拉长,弹簧2被压缩,m 所受合力1212()F kx k x k x k k x ==+=+由此求得“组合弹簧”的劲度系数12k k k =+为常量,可见物体m 所受合力为线性回复力,所以系统作简谐振动,振动的圆频率和周期分别为120k k m ω+= , 122m T k k π=+ 2.3 弹簧振子的质点质量为42.510kg -⨯,运动学方程为0.06cos(5)(m)x t π=+.求:(1)振幅和周期;(2)质点的初始位置;(3)质点位于初始位置时所受合力;(4)质点在s t π=时的位置、速度和加速度.解 (1)由运动学方程可见,振幅006m A .=,05ω=,周期0204(s)126(s)T ..ππω===(2)由运动学方程可见,0t =时,质点的初始位置0006cos 006(m)x ..π==-.(3)对运动学方程求时间导数可得d 0.3sin(5)d x x v t tπ==-+ d 1.5cos(5)d x x v a t t π==-+ 0t =时0 1.5cos 1.5x a π=-=,根据牛顿第二定律可知质点位于初始位置时所受合力440025101537510(N)x F ma ...--==⨯⨯=⨯(4)把t π=代入运动学方程和(3)中求得的x v 、x a 表达式,即可求得质点在t π=时的位置、速度和加速度分别为006cos(5+)006(m)x ..ππ==03sin(5)0(m )x v .ππ=-+=215cos(5) 1.5(m )x a .ππ=-+=-2.4 一质点作简谐振动,振幅为0.02m ,速度幅为0.03m s ,取速度为最大值时为0t =.求:(1)周期;(2)加速度幅;(3)运动学方程. 解 设运动学方程为00cos()002cos()x A t .t ωϕωϕ=+=+,则00002sin()x v .t ωωϕ=-+200002cos()x a .t ωωϕ=-+(1)由m 0002003v ..ω==,可知000315002...ω==,所以周期为 022419(s)15T ..ππω=== (2) 222m 0002002150045(m s )a ....ω==⨯=(3)由已知条件0t =时00x =、0m x v v =,可知0002cos .ϕ=、m m sin v v ϕ=-,即cos =0ϕ ,sin =1ϕ- 由以上二式求出2πϕ=-,所以运动学方程为002cos(15)2x ..t π=-2.5 一水平放置的弹簧振子,质点质量为0.1kg ,振幅为0.01m ,质点运动的最大加速度为20.04m s .求:(1)系统的机械能;(2)质点通过平衡位置时的动能;(3)以0.01m x =时为0t =,动能与势能相等的时刻.解 根据001m A .=和22m 0004m s a A .ω==,可以求出00040012..ω==. 由0k m ω=,可知2001404k m ..ω==⨯=.(1)系统的机械能2251104001210(J)22E kA ..-==⨯⨯=⨯ (2)通过平衡位置时0x =,势能p 0E =,所以动能5k 210(J)E E -==⨯.(3)由已知条件0t =时0001m x .=、00x v =,可知cos 1ϕ= , sin 0ϕ=由以上二式求出0ϕ=.于是2252k 01sin ()210sin 22E kA t t ωϕ-=+=⨯ 2252p 01cos ()210cos 22E kA t t ωϕ-=+=⨯ 动能与势能相等的时刻,k p E E =,即22sin 2cos 2t t =可求出2(21)244t kk πππ=+=+ , 0123k ,,,...= 所以(21)8t k π=+,0123k ,,,...=2.6 题图2.6所示为振幅与频率相同的两个简谐振动的x t -图.求:(1)两个简谐振动的运动学方程;(2)哪个简谐振动的相位超前?超前多少? 题图2.6解 由x t -图可见01m A .=、4s T =,可知0205.Tπωπ==. 对振动(1),1101cos (05)x ..t πϕ=+,当0t =时101005201cos x ..ϕ== , 101005sin 0x v .πϕ=-<可知14πϕ=.运动学方程为 101cos(05)4x ..t ππ=+ 振动(2),2201cos (05)x ..t πϕ=+,当0t =时 202005201cos x ..ϕ== , 202005sin 0x v .πϕ=->可知24πϕ=-.运动学方程为101cos(05)4x ..t ππ=- 两个简谐振动的的相位差 122πϕϕϕ∆=-=说明振动(1)比振动(2)超前2π. 2.7 有两个同方向同频率的简谐振动,它们的运动学方程分别为130.05cos(10)4x t π=+和210.05cos(10)4x t π=+(国际制单位).求:(1)合振动的振幅和初相位;(2)若另有一振动30.08cos(10)x t ϕ=+,ϕ为何值13x x +的振幅最大?ϕ为何值13x x +的振幅最小?(利用旋转矢量图解题)解 (1)分别作与0t =时刻的1x 和2x 对应的旋转矢量1A 和2A ,如题解图2.7.由旋转矢量图可见合矢量12A A +的长度为0.052,与Ox 轴夹角为90ο.于是可知合振动的振幅0.052m A =,初相位12ϕπ=合. 题解图2.7(2)1x 和3x 同相,即34ϕπ=时,13x x +的振幅最大;1x 和3x 反相,即14ϕπ=-时,13x x +的振幅最小.2.8 有两个同方向同频率的简谐振动,其合振动的振幅为0.02m ,合振动与第一个分振动的相位差为30ο,第一个分振动的振幅为0.013m .求:(1)第二个分振动的振幅;(2)两个分振动的相位差.(利用旋转矢量图解题)解 根据已知条件作旋转矢量图,如题解图2.8.(1)由图可见,第二个分振动的振幅20.01m A =.(2)由图可见,两个分振动的相位差2190ϕϕο-=. 题解图2.82.9 现在力学的学习暂时告一段落,请读者总结一下有何收获和体会?(牛顿质点力学的理论结构、数学和物理的关系、学习了哪些方法……)*2.10 某阻尼振动(弱阻尼状态)的振幅经一“周期”后变为原来的13,求振动的“周期”为振动系统固有周期的几倍.解 弱阻尼振动()e cos t x A 't βωϕ-=+,由题意()e 1e 3e et T 't T'T'A A ββββ--+-=== lne ln3T'T 'ββ==所以22ln 3'T 'ππβω==根据'ω=0ω== 于是0022T ''T 'ωπωπωω===1015.= *2.11 质量为3310kg m -=⨯的质点,挂在劲度系数21.210N m k -=⨯的弹簧下端,沿Ox 轴运动.质点除线性回复力外,还受策动力0cos 2t(N)x F F =和阻力rx x F v γ=-作用.求当阻力系数γ增为原来的3倍时,质点稳态振幅减为原来的几分之几?解 根据已知条件,22312104310k .m ω--⨯===⨯,2ω=.故弱阻尼受迫振动的稳态振幅004f A β== 由于00F f m =和2mγβ=,所以 002F A γ=当3'γγ=,00001263F F A A γγ'===',因此当阻力系数γ增为原来的3倍时,质点稳态振幅减为原来的三分之一.*2.12 为什么说牛顿力学是“确定性”的?混沌的基本特征是什么?。
微积分上第二章习题参考答案
微积分第二章习题参考答案
16
x e x sin e x cos 0 x 三.解: , 2 3 2 0 y
1 S | 2 x0 | | 2 y0 | 2a 2为常数,与切点无关. 2
微积分第二章习题参考答案 6
§2.2求导法则(21-22)
一.1. 2cos x sec x, 3cos x 2sec x; x e sin 2. cos e , ; 2x 1 e
2 2
x 2 x cos2 x sin2 x 1 2 3. , e ( cos3 x 3sin3 x ); 2 x 2
微积分第二章习题参考答案 26
(n)
2
n 1
2. y xe .
x x x x y e xe e ( x 1),
y e x ( x 1) e x e x ( x 2),
t2 2 t2
3. y
1 1 x
2
, y
x (1 x )
2 3 2
;
4. y ( n ) n ! 2n e 2 x 1 ;
5. y e (sin cos ) 2e sin(
4
);
微积分第二章习题参考答案
20
2 dy d y 2 2 2 2 6. 2tf ( t ) , 2 2 f ( t ) 4t f ( t ) ; dt dx
lim f (cos x )( sin x )
x 0
DS习题答案02.docx

第七章集合与搜索树1.第 137 页,第(5),建立37, 45, 91, 25, 14, 76, 56, 65为输入时的二叉搜索树,再从该树上依此删除76, 45,则树形分别如何?(a)建成的二叉搜索树0>)册1除76后(c)册]除45后2.第137页,第(6)试写一个判定任意给定的二叉树是否二叉搜索树算法。
int k=-8; bool fail=false;template <class T>void BTree<T>::IsBiTree(BTNode<T> *p, int &k,bool(if (p&& !fail) (IsBiTree(p->lchild, k,fail);if(k< p->element) k=p-〉element;else fail=true;IsBiTree(p-〉rchild,k,fail);}}3.第137页,第(8)以下列序列为输入,从空树开始构造AVL搜索树。
(DA, Z, B, Y, C, X(2)A, V, L, T, R, E, I, S, 0, K4.第 137页,第(12)5阶B-树的高度为2时,树中元素个数最少为多少?答:55.第137页,第(13)题从空树开始,以关键字序列:a, g, f, b, k, d, h, m, j, e, s, i, r, x ,建立(1) 4 阶B-树;(2) 5阶B-树。
⑵5阶B-树6.第137页,第(14)题从上题的4阶B-树上依次删除a, e, f, h。
第八章散列与跳表1.第154页,第(3)题设散列表ht[ll],散列函数h(key)=key % 11…采用线性探查法解决冲突,试用关键字值序列:70, 25, 80, 35, 60, 45, 50, 55 建立散列表。
Key 70 25 80 35 60 45 50 55h(Key) 4 3 3 2 5 1 6 00123456789 102.第154页,第(6)题给出用拉链方法解决冲突的散列表搜索操作的C++函数实现。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
}
2.15设线性表A=(a1,a2,…,am),B=(b1,b2,…,bn),试写一个按下列规则合并A、B为线性表C的算法,使得:
C= (a1, b1,…,am, bm, bm+1,…,bn)当m≤n时;
或者
C= (a1, b1,…,an, bn,an+1,…,am)当m>n时。
线性表A、B、C均以单链表作为存储结构,且C表利用A表和B表中的结点空间构成。注意:单链表的长度值m和n均未显式存储。
else if(p->data >='0' && p->data<='9')
{temp=p->next; p->next=Lnum->next; Lnum->next=p; p= temp; }
else
{temp=p->next; p->next=Loth->next; Loth->next=p; p= temp; }
(2)以单链表作存储结构。
(略)
(1)
void ReverseArray(ElemType a[],int n)
{
int i=0,j=n-1;
ElemType t;
while(i<j)
{ t=a[i]; a[i]=a[j]; a[j]=t;}
}
(2)
void ReverseList(LinkList L)
Node *pa=A->next,*pb=B->next; //pa和pb分别指向A,B的当前元素
A->next=NULL; C=A;
while(pa!=NULL && pb!=NULL)
{
if(pa->data < pb->data)/*将pa的元素前插到pc表*/
{temp=pa->next; pa->next=C->next;C->next=pa; pa=temp;}
//L为待拆分链表
//Lch为拆分后的字母链;Lnum为拆分后的数字链,Loth为拆分后的其他字符链
//Lch,Lnum,Loth均已被初始化为带头结点的单循环链表,采用头插法
void splitLinkList(LinkList L,LinkList Lch,LinkList Lnum,LinkList Loth)
头结点:为了操作方便,在第一个元素结点前申请一个结点,其指针域存放第一个元素结点的地址,数据域可以什么都不放;
首元素结点:第一个元素的结点。
2.4已知顺序表L递增有序,写一算法,将X插入到线性表的适当位置上,以保持线性表的有序性。
void InserList(SeqList *L,ElemType x)
int SearchNode(LinkListL,int k)
{
Node *p=L,*q;
int i=0;
while(i<k && p)
{i++; p=p->next; }
if(p==NULL) return 0; //不存在倒数第k个元素
q=L->next;
while(p->next!=NULL) //p到终点时,q所指结点为倒数第k个
else
{pc->next=pb->next; pc=pc->next; pb=pb->next; tag=0;}
}
if(pa)pc->next=pa->next;
elsepc->next=pb->next;s
}
2.16将一个用循环链表表示的稀疏多项式分解成两个多项式,使这两个多项式中各自仅含奇次项或偶次项,并要求利用原链表中的结点空间来构成这两个链表。
int DelList(SeqList *L,int i,int k)
{
int j,l;
if(i<=0||i>L->last) {printf("The Initial Position is Error!"); return 0;}
if(k<=0) return 1; /*No Need to Delete*/
while(pa)
{
if(pa->exp%2==0) //偶次项
{rc->next=pa->next; rc=rc->next; pa=pa->next; }
else//奇次项
{rb->next=pa->next; rb=rb->next; pa=pa->next; }
}
rb->next=NULL; rc->next=NULL;
{q=q->next; p=p->next;}
printf("%d",q->data);
return 1;
}
2.11把元素递增排列的链表A和B合并为C,且C中元素递减排列,使用原空间。(头插法)
LinkListReverseMerge(LinkList*A,LinkList*B)
{LinkList C;
if(i+k-2>=L->last) L->last=L->last-k; /*modify the length*/
for(j=i-1,l=i+k-1;l<L->last;j++,l++)
L->elem[j]=L->elem[l];
L->last=L->last-k;
return 1;
}
2.6已知长度为n的线性表A采用顺序存储结构,请写一时间复杂度为O(n)、空间复杂度为O(1)的算法,删除线性表中所有值为item的数据元素。
L->next=q; q=temp;
}
Else//插到pFlag结点后面
{Hale Waihona Puke temp=q->next; q->next=pFlag->next;
pFlag->next=q; q=temp;
}
}
}
2.13假设有一个循环链表的长度大于1,且表中既无头结点也无头指针。已知s为指向链表某个结点的指针,试编写算法在链表中删除指针s所指结点的前驱结点。
}
L->last=i-1;
}
[算法2]
void DeleteItem (SeqList *L,ElemType e)
{
int i,j;
i=j=0;
while(L->elem[i]!=e && i<=L->last)
i++;
j=i+1;
while(j<=L->last)
{
while(L->elem[j]==e && j<=L->last)
void DelPreNode(Node* s)
{
Node* p=s;
while(p->next->next!=s) p=p->next;
free(p->next);
p->next=s;
}
2.14已知由单链表表示的线性表中含有三类字符的数据元素(如字母字符、数字字符和其他字符),试编写算法来构造三个以循环链表表示的线性表,使每个表中只含同一类的字符,且利用原表中的结点空间作为这三个表的结点空间,头结点可另辟空间。
{
int i=L->last;
if(L->last>=MAXSIZE-1) return FALSE; //顺序表已满
while(i>=0 && L->elem[i]>x)
{
L->elem[i+1]=L->elem[i];
i--;
}
L->elem[i+1]=x;
L->last++;
}
2.5删除顺序表中从i开始的k个元素
{
Node *p=L->next;
while(p!=NULL)
{
if( (p->data >='a' && p->data<='z')|| (p->data >= 'A' && p->data<='Z'))
{temp=p->next; p->next=Lch->next; Lch->next=p; p= temp; }
[算法1]
void DeleteItem(SeqList *L,ElemType item)
{
int i=0,j=L->last;
while(i<j)
{
while(i<j && L->elem[i]!=item) i++;
while(i<j && L->elem[i]==item) j--;
if(i<j) { L->elem[i]=L->elem[j]; i++; j--;}
j++;
if(j<=L->last)
{
L->elem[i]=L->elem[j];
i++; j++;
}
}
L->last=i-1;