机器人技术与系统国家重点实验室(哈尔滨工业大学)
十大优秀工业机器人系统集成商分析
十大优秀工业机器人系统集成商分析十大优秀工业机器人系统集成商分析工业机器人产业是一个集系统集成、先进制造和精密配套融合一体的产业,是一个需要技术、制造、研发沉淀经验的行业。
从我国机器产业链发展来看,由于受核心技术限制等多方面因素影响,我国工业机器人产业目前获得突破的主要为系统集成领域。
国内一些领先企业从集成应用开始,主要借助对国内市场需求、服务等优势,逐渐脱颖而出,取得了不错的市场成绩。
笔者对获得2013年十大优秀工业机器人系统集成商的发展概况及主要产品进行了简单归纳分析,以飨读者。
1、佛山市利迅达机器人系统有限公司(简称:利迅达)佛山市利迅达机器人系统有限公司是从事机器人系统自动化集成和工业智能化设备研发、生产的高科技企业。
公司筹备于2008年,于2010年4月正式成立,经过数年迅猛增长,已发展成为华南地区乃至国内规模最大,实力最强的专业工业机器人应用系统集成商。
利迅达与欧州多家高技术企业的机器人系统研发生产企业战略合作,令利迅达由一开始就在一个国际级的高起点上,再根据中国市场实际,研发出一系列具自有知识产权的全新意念的金属产品表面处理综合系统。
其中“机器人打磨拉丝系统”被评为2011年广东省高新技术产品;“机器人智能化焊接系统”被评为2012年广东省高新技术产品。
公司为顺德区百家智能制造工程试点示范企业,在2013年被认定为国家级高新技术企业。
2、厦门思尔特机器人系统有限公司(简称:思尔特)思尔特创建于2004年6月,位于厦门集美灌南工业区,是厦门市高新技术企业。
思尔特多年来为中联、徐工、柳工、厦工、龙工、玉柴等多家国内大中型企业服务,设计制造出技术先进的机器人系统。
2009年,思尔特在上海成立全资子公司上海思尔特机器人科技有限公司,针对冲压机、折弯机、压铸机、弯管机、热锻机等机床的自动上下料生产线的研发、设计、制造。
2010年,思尔特决定打造西南区制造基地,于2010年7月注册成立全资子公司成都思尔特机器人科技有限公司。
一种多关节履带式机器人自主越障运动规划
图4
双单元越障动作规划
2. 2
单单元越障模式 由上面分析可知, 对于高度小于 166 mm 的 垂直障碍可以采用单单元越障模式 , 如图 3 所示.
设机器人初始状态各个关节角度均为 0. 每一步 骤中由于只有一个角度是自变量, 因此很容易得 到各个角度在不同阶段与高度之间的关系 . 当抬起第 1 单元越障时( 如图 3 ( 1 ) 所示) , θ4 = arcsin( H - 0. 5h h , 2 2 ) + arctan L 0 . 25 h + 0 . 25 L4 4
收稿日期: 2011 - 01 - 19. 基金项目: 国家高技术研究发展计划重点资助项目 ( 8632007AA041501 ) . 作者简介: 朱 赵 磊( 1982 —) , 男, 博士研究生; 杰( 1968 —) , 男, 教授, 博士生导师.
法有解析法、 代数法、 几何法、 数值解法等. 前三种 方法由于涉及到矩阵与反三角函数运算, 不适合 处理多关节的机器人逆运动学问题; 数值方法模 型简单, 但是不能求得所有解, 而且计算量随着关 [2 - 3 ] ; 传统的方法已经 节数目Байду номын сангаас增加呈指数增长 [4 ] . 无法满 足 需 要 随 着 遗 传 算 法 、 神经网络算 [5 ] [6 ] [7 ] 法 、 模拟退火算法 、 蚁群算法 、 粒子群算 [8 ] 为机器 法 等现代启发式数值优化方法的出现, 人的逆运动学求解提供了便捷的方式. 以上算法 都有各自的优点, 但是当自变量数较多而且之间 有耦合作用时, 存在着收敛速度慢, 结果不精确等
杆件长度 / mm L1 = 412 . 5 L1 = 425 . 0 L3 = 465 . 0 L4 = 392 . 5
哈尔滨工业大学机电工程学院教师招聘启事

哈尔滨⼯业⼤学机电⼯程学院教师招聘启事岗位名称:招聘部门:机电⼯程学院⼀、岗位介绍及职责1、机械设计系(1)设岗单位基本情况机械设计系由原机械原理和机械零件教研室(均成⽴于1952年)合并⽽成,现拥有⼀⽀教学科研⽔平⾼、综合素质好的师资队伍,教职⼯⼈数达41⼈,其中教授、博导17名,副教授14名,7名,教学名师1⼈,省级教学名师3⼈,于2007年⼊选教育部机械基础系列课程教学团队。
近年来,获国家教学成果奖2项,省级教学成果奖5项,承担的本科⽣专业基础课:机械原理与机械设计先后被评为精品课程。
该系在科研⽅⾯实⼒雄厚,所属的机械设计及理论⼆级学科是国防重点学科,建有宇航空间机构及控制国防重点学科实验室,拥有机械传动智能设计与控制、特种机器⼈技术与控制、摩擦学、机械CAD、动⼒学及振动与噪声控制等研究⽅向,承担了⼀批国家重要科研任务,近年来,获国家科技奖3项、省部级科技奖5项、出版专著10余部、发表论⽂600余篇等。
(2)主要⼯作任务和职责教学⽅⾯Ÿ 承担本科⽣《机械原理》、《机械设计》及《机械设计基础》课程及研究⽣《微分⼏何建模及应⽤》课程的教学⼯作。
科研⽅⾯Ÿ 能够进⾏特种传动设计、齿轮动⼒学等⽅⾯的研究⼯作。
2、电液伺服仿真及试验系统研究所(1)设岗单位基本情况电液伺服仿真及试验系统研究所专门从事电液伺服控制系统开发、应⽤及研究的专业所。
其前⾝为哈尔滨⼯业⼤学流体传动及控制教研室,该教研室是我国最早建⽴的该学科的科研和教学单位。
早在1960年就培养出了第⼀届液压传动本科毕业⽣,是原机械部在⾼校中建⽴的两个流体传动及控制研究室之⼀。
多年来在⼤型⾼性能电液伺服仿真及试验设备、静液传动和负荷敏感技术、液压元件及其可靠性、⽓动技术基础理论和⽓动系统设计等⽅⾯作了⼤量⼯作,获得20多项和部级科技进步奖。
现有教师10⼈,其中教授2⼈,副教授4⼈,4⼈,在读博⼠⽣20⼈,硕⼠12⼈。
该课题组承担6门课程(共180学时,30学时/⼈)。
一梦十年--记慈利县零阳镇一完小机器人教练员王杰

一梦十年--记慈利县零阳镇一完小机器人教练员王杰
李瑚
【期刊名称】《发明与创新(小学)》
【年(卷),期】2015(000)008
【摘要】梦想还是要有的,万一实现了呢?10年前,张家界市慈利县零阳镇一完小的王杰有一个关于机器人的梦想。
他希望把机器人带进山里,带到学校,让这里的孩子走进机器人的奇妙世界。
如今梦想成真。
【总页数】3页(P10-12)
【作者】李瑚
【作者单位】
【正文语种】中文
【相关文献】
1.勇于实践的逐梦者——记中国男子体操队教练员白远韶
2.筑梦移动机器人——记哈尔滨工业大学机器人技术与系统国家重点实验室教授丁亮
3.筑梦纳米能源共话科技未来——记中国科学院北京纳米能源与系统研究所研究员王杰
4.从贵州到湖南:不灭的教育梦——记湖南省安化县平口镇完小刘习聪老师
5.慈利县零阳镇第一完全小学绽放在澧水河畔的一朵教育奇葩
因版权原因,仅展示原文概要,查看原文内容请购买。
骨科手术机器人技术发展综述

骨科手术机器人技术发展综述于洪健 李 乾 杜志江(哈尔滨工业大学机器人技术与系统国家重点实验室,哈尔滨,150080)摘 要近年来,个性化、精准化及微创化治疗方式成为骨科手术的重要发展方向,手术机器人技术、医学影像技术及手术导航技术的应用则成为该领域的研究热点。
由于骨科手术分类以及手术术式的多样性,一般通用机器人难以满足手术需求,因此专科型骨科手术机器人成为未来发展的必然趋势。
本文从骨科手术机器人的发展入手,根据不同骨科分类应用系统,介绍了骨科手术机器人的技术发展,并对其关键技术进行分析与论述。
关键词:机器人,骨科手术,导航系统0引言骨科手术是典型的硬组织操作手术,手术术式繁多、临床需求广泛。
骨科手术机器人已经成为推动骨科手术个性化、精准化、微创化发展的核心装备与技术,其操作对象属于人体硬组织,在物理学中可视为刚体,因此骨科手术机器人也可称为“硬组织操作机器人”。
科学技术的发展与应用,极大的推动了现代骨科学与骨科手术技术的发展,如计算机图像处理技术与医学影像技术在临床骨科中的融合应用,促进了“计算机辅助骨科手术(Computer Assisted Orthopedic Surgery,CAOS)”的发展;其核心技术图像引导手术IGS(Image guided Surgery),通过X光或CT影像信息作为主要数据载体,结合空间定位导航技术对患部位置信息及手术工具位姿信息进行跟踪,可实现高精度术中导航。
而机器人技术与图像引导技术的结合与应用,进一步推动了机器人辅助骨科手术(Robotic Assisted Orthopedic Surgery)的发展,机器人可以依据医学影像信息直接进行手术操作规划、定位及控制,实现辅助或自主手术操作。
骨科手术属于深部手术,内部结构复杂,操作对象为骨性刚体结构,故对操作精度要求高,而且手术术式多样、操作流程复杂、操作需求繁多。
骨科手术机器人系统通常由影像系统、手术规划导航系统、机器臂操作系统三大部分组成,其中影像系统由X光机或CT等医学影像设备构成,可实现对手术部位空间位置信息的透视,并通过定位标靶实现坐标信息由图像坐标系到机器人坐标系的转换,为机器人系统操作提供基础位置信息,因此图像分辨率(精度)及质量、影像坐标转换精度,对机器人手术操作精度具有重要影响。
哈尔滨工业大学电磁与电子技术研究所

哈尔滨工业大学隶属研究机构
01 学校简介
03 科研设备
目录
02 师资力量 04 科研范围
05 人才培养
07 科技发明
目录06 研究成果 Nhomakorabea哈工大微特电机专业成立于50年代初期,是哈工大建校初期的主要学科之一,在国际电机学术领域和国内电 机领域具有相当影响。2000年,被评为黑龙江省重点学科,2001年被评为国家重点学科、国防科工委重点学科, 同时也是学校“985工程”、“211工程”重点建设学科。
哈工大电磁与电子技术研究所成立于2003年12月,前身是哈工大微特电机教研室。研究所原名电动车研究所, 主要为发展电磁应用领域而进行理论基础、组件、电路及系统技术方面的研究。研究领域涉及机电、能源、交通 与环境。研究所建筑面积3000平方米,下设有电动车辆研究中心,主要从事电动车辆电气系统仿真与设计,电驱 动系统、储能设备监测与管理的研究与开发以及汽车电子与计算产品的研发,并设有电动车电驱动系统实验室、 特种电机实验室、测试与控制实验室、电磁装备实验室、新原理电磁装置实验室。
科研设备
功率分析仪;电池模拟系统等。
科研范围
科研方向 1、特种电机系统理论及应用技术 电动车辆驱动电机及其驱动控制技术 高性能磁阻电机基础理论及应用技术 机床主轴电机及其驱动控制技术 航天电动执行机构及其驱动控制技术 机器人用电机及其驱动控制技术 压缩机用电机及其驱动控制技术 静电电动机技术 新型超导电机理论及技术 2、车辆电力与电子
研究成果
研究所承担的研究方向包括4个领域17个子课题。研究成果显著,多次获得国家、教育部、国防科工委、航 天工业总公司和黑龙江省的奖励。在IEEETransactions on Magnetics、中国电机工程学报、电工技术学报、微 特电机、微电机等期刊以及在各种国际学术会议上发表论文400多篇,其中被SCI检索30多篇,被EI检索100多篇。 伴随着科研工作的发展与总结,研究人员陆续出版了《新型电驱动控制系统及其相关技术》、《步进电动机及其 驱动控制系统》、《电机与电器的数学分析方法》、《PHYSICS OF ELECTRIVC LAUNCH》、《步进电动机》、 《电动机智能控制基础》、《石英电子表手机电换能器》等学术著作。随着科研工作的不断深入和对科技创新的 追求,近几年研究所陆续申请国家发明专利近70项,其中已获授权15项。
哈尔滨工业大学(简介)

哈尔滨工业大学哈尔滨工业大学隶属于工业和信息化部,是由工信部、教育部、黑龙江省共建的国家重点大学,是首批进入国家“211工程”和“985工程”建设的若干所大学之一。
1920年,中东铁路管理局为培养工程技术人员创办了哈尔滨中俄工业学校——即哈尔滨工业大学的前身,学校成为中国近代培养工业技术人才的摇篮。
新中国成立后,哈尔滨工业大学成为全国学习前苏联高等教育办学模式的两所大学之一,此后学校一直得到国家的重点建设。
2000年,同根同源的哈尔滨工业大学、哈尔滨建筑大学合并组建新的哈尔滨工业大学。
如今,学校已经发展成为一所特色鲜明、实力雄厚,居于国内一流水平,在国际上有较大影响的多学科、开放式、研究型的国家重点大学。
学校坐落在中国北方冰城哈尔滨市,同时在威海市和深圳市分别设有哈尔滨工业大学(威海)和哈尔滨工业大学深圳研究生院,形成了“一校三区”的办学格局。
学校在长期的办学过程中,形成了“规格严格,功夫到家”的校训,以朴实严谨的学风培养了大批优秀人才,以追求卓越的创新精神创造了丰硕的科研成果。
学校以适应国家需要、服务国家建设为己任,形成了以航天特色为主,拓宽通用性为准则,充分发挥学科交叉、融合的优势,形成了由重点学科、新兴学科和支撑学科构成的较为完善的学科体系,涵盖了哲学、经济学、法学、教育学、文学、历史学、理学、工学、管理学、艺术学等10个门类。
学校坚持以人为本、爱惜人才、不拘一格培养和使用青年人才的历史传统,汇聚、培养了以两院院士为带头人、长江学者和国家杰出青年基金获得者、教育部新世纪优秀人才等中青年骨干为代表的锐意进取、业务精良、作风过硬的高水平师资队伍,为学校创建世界一流大学奠定了良好的人才基础。
学校实施了“首席国际学术顾问计划”,聘请国际著名学者和管理专家,以世界一流大学的标准和发展经验为学校人才培养、学科建设、基础科研和管理服务等各方面的发展建设提供指导。
同时,学校还广纳海内外贤才,聘请境外兼职博导、合约外国专家和海外留学人员来校工作,他们中80%的海外留学人员是在美、俄、英、法、德、日等国家的著名大学取得博士学位,具有丰富的教学经验和很高的学术水平。
2023年机器人学国家重点实验室开放课题指南

2023年机器人学国家重点实验室开放课题指南一、背景介绍机器人技术是当今世界科技领域的热点之一,其在工业生产、医疗保健、军事防御等领域具有广泛的应用前景。
为了推动我国机器人技术的发展,加强机器人学科的研究和创新,促进机器人产业的发展,我国设立了一系列国家重点实验室,致力于机器人学领域的科研工作。
为进一步推动机器人学领域的研究和创新,本次开放课题指南旨在吸引更多科研人员参与机器人学国家重点实验室的相关研究,加快我国机器人技术的发展进程。
二、课题范围本次开放课题指南主要围绕以下几个领域展开研究,具体包括但不限于:1. 智能机器人技术2. 机器人视觉与感知3. 机器人运动控制与规划4. 机器人学习与决策5. 仿生机器人技术6. 柔性机器人与可穿戴机器人技术7. 社交机器人与服务机器人技术8. 其他相关领域三、申报要求1. 申报人需具有机器人学、自动化、计算机科学、电子工程等相关领域的博士学位,并具有丰富的科研经验和成果;2. 申报人需具有在国际上具有一定知名度的研究成果,包括发表高水平SCI论文、获得过大型科研项目的资助等;3. 申报人需提出具有前瞻性、创新性和实用性的研究方案,能够突破当前技术瓶颈,解决现实生产和社会问题;4. 申报人需具备团队合作精神,能够与国内外其他研究团队进行合作,促进机器人学科的跨学科交叉融合。
四、申报流程1. 申报人可在相关国家重点实验室官方全球信息湾下载《2023年机器人学国家重点实验室开放课题申报表》,填写完整后发送至指定电流信箱;2. 经过初审合格的申报人将被邀请参加相关领域专家组成的评审会,进行课题答辩;3. 评审组将根据申报人的学术水平、研究方案的前瞻性、创新性和实用性进行评定,并确定最终的开放课题名单。
五、资助与支持1. 通过评审的开放课题将获得国家重点实验室的研究资助,包括科研经费、实验室设备支持等;2. 申报人可获得实验室导师团队的技术支持和指导,在研究过程中得到专业的指导和帮助;3. 优秀课题的研究成果将得到实验室的重点推广和宣传,有可能获得更多的科研项目资助和产业合作机会。
国家重点研发计划智能机器人重点专项拟立项的2017年度

中国科学院自动化研究所
乔红
899
3
3 2017YFB1300300 生-机智能交互与生机电一体化机器人技术
天津大学
明东
959
3
4 2017YFB1300400 人机协作型移动式双臂灵巧作业机器人
哈尔滨工业大学
刘伊威
1396
3
5
2017YFB1300500
负重及搬移托举助力外骨骼机器人关键技术研 究及典型应用验证
中广核研究院有限公司
黄文有
1368
3
26 2017YFB1302600 面向TBM施工的机器人智能作业系统
中国铁建重工集团有限公司
程永亮
1317
3
27 2017YFB1302700 眼科显微手术机器人系统研制与临床试验
首都医科大学附属北京同仁医院
边桂彬
940
3
28 2017YFB1302800 经输尿管肾内介入诊疗机器人系统
北京理工华汇智能科技有限公司
李兵
948
3
23 2017YFB1302300 截瘫助行外骨骼系统关键技术研究及示范应用 上海电气自动化设计研究所有限公司 程洪
873
3
24 2017YFB1302400 服务机器人云服务平台
浪潮软件集团有限公司
周风余
881
3
25 2017YFB1302500 核电站机器人检修智能作业系统
北京翼辉信息技术有限公司
牛建伟
914
3
12
2017YFB1301200
面向工业机器人生产线的工艺规划仿真与离线 编程软件
杭州新松机器人自动化有限公司
李正刚
913
3
盘点:中国十大正在崛起的机器人公司
盘点:中国十大正在崛起的机器人公司“百舸争流”用在目前的国内机器人行业在适合不过了,目前国内大大小小的机器人公司都快数不清。
机器人市场都快呈现饱和状态,但是还有不少上市公司投资机器人,准备进军机器人行业。
每一个城市都有代表性的机器人公司,那么这些机器人公司的硬件和软件又怎样呢?一起看看专家的点评吧!1、海尔哈工大机器人技术有限公司哈尔滨海尔哈工大机器人技术有限公司是海尔集团与哈尔滨工业大学合资成立的高新技术企业,是国家863计划机器人产业化基地,是国家机器人和自动化技术应用领域的核心骨干企业之一。
公司自成立伊始,即自动化设备、工业机器人应用工程、直角坐标机器人及智能服务机器人几大类高科技产品的设计、研发、制造和销售。
经过几年的研发历程,已掌握了多项机器人产品关键技术,拥有8项专利。
产品和服务涉及汽车及其零部件、工业电器、电子通讯、食品饮料、医疗、日化、家电、航天、军工等广阔的工业领域。
罗百辉:该公司主要研究项目为工业自动化生产线,其次为服务型机器人,海尔和哈工大两强联手,实力可想而知。
我个人感觉该公司的工业生产线缺乏国际品牌影响力,服务型机器人在工业设计和实事求是地面向市场方面有欠缺(尽管该公司已经研究服务型机器人很多年了,但尚未见有影响力的机器人面世)2、北京汉库机器人技术有限公司北京汉库机器人技术有限公司是专业从事高校创新实验室建设的高新技术企业。
总部位于中关村科技园区,在广东和浙江分别有生产制造基地。
拥有多项专利技术,在机器人教育及科研和电子、机械等创新实验室领域的研究和开发始终保持着领先地位。
一些中央领导关心该公司,享受很多国家扶持政策。
罗百辉:该公司主要研制小型教育机器人,特别是小仿人形机器人,技术含量有限但市场前景看好(与自动生产线、医疗机器人、空间站机械臂、月球车等相比技术含量确实低)。
3、北京拓博尔机器人科技有限公司北京拓博尔机器人科技有限公司是以机器人开发和机电系统集成为主营业务的国家级高科技企业。
模块化自重构机器人协调运动规划与运动功能进化研究

哈尔滨工业大学工学硕士学位论文5.3.1 Experimental Research using CPG signals (55)5.3.2 Experimental Research Evolving Locomotion (55)5.4 Summary (56)Conclusions (57)References (59)Statement of copyright and Letter of authorization (64)Acknowledgements (65)哈尔滨工业大学工学硕士学位论文第1章绪论1.1课题背景、意义及目的本硕士课题所做的研究工作主要是针对于链式结构的模块化自重构机器人,构建了三维联合动力学仿真平台,使用了由生物学原理的概念所启发的方法来对其进行运动规划,并利用了优化算法在仿真环境中对机器人系统的运动功能进行了进化。
伴随着机器人技术的不断发展进步,不仅仅是单调,危险的工作需要由机器人来完成,而且在非结构化,遥远和多变未知环境中的任务,比如深空探险,海底勘探,城市搜救,等等,也需要有机器人的参与。
这样一来需求的驱动就使得通用性强,适应能力强,自主的,以及稳定性高的机器人,成为了研究者们所关心的课题。
同时,构建生物体的细胞集能够表现出很多种类的功能这个事实,激发出了研究者们智慧的火花。
生物体具有自组织,自复制和自修复的功能,并且群体活动的生物能够通过彼此协调而完成单个生物个体所无法完成的功能。
如图1- 1 所示,蚂蚁群体可以彼此帮助而构成蚁桥而使其他的蚂蚁能够顺利地通过障碍。
从而研究者们提出了模块化可重构机器人的概念。
如果机器人能够自主地,不需要外界人类的参与,就能改变模块间所连接的方式,则称其为模块化自重构机器人。
图1- 1 蚁群构桥越障碍Fig.1-1 Bridge by ants to get over crag哈尔滨工业大学工学硕士学位论文模块化自重构机器人是将许多个模块以一定方式集合起来的机器人系统。
机器人实验室建设方案详细

机器人实验室建设方案(参考样例)目录第一部分机器人国外发展概况及人才需求分析 (3)1.1机器人国际发展状况.....................................................................................................-3-1.2机器人国发展状况.....................................................................................................-4-1.3机电电器类人才需求分析 (5)第二部分机器人实验室建设规划 (9)2.1基础训练区................................................................................................................. (9)2.1.1 最小机电系统连接与控制实训平台......................................................................................... - 9 -2.1.2 基础提高训练设备................................................................................................... ................ - 10 -2.2综合应用实训区...........................................................................................................-11-2.2.1 多控制四轴码垛机器人系统.................................................................................................- 11 -2.2.2 6 自由度多控制模块化可拆装机器人系统.......................................................................... - 12 -2.2.3 6 自由度弧焊机器人工作站系统..........................................................................................- 13 -2.2.4 6 自由度搬运装配机器人工作站系2.2.5 6 自由度点焊机器人工作站系统(体积较大,可选)....................................................... - 15 -2.2.6 模块化多机器人柔性制造/自动化物流综合实训系统........................................................ - 15 -2.2.7 智能移动机器人................................................................................................... .................. - 16 -2.2.8 AGV 小车................................................................................................... ............................ - 17 -2.3拓展展示区...................................................................................................................-17-2.3.1 仿人形机器人................................................................................................... ...................... - 17 -2.3.2 特种爬壁机器人................................................................................................... .................. - 18 -2.3.3 特种球形机器人................................................................................................... .................. - 18 -2.3.4 可重构并联机器人................................................................................................... .............. - 19 -第三部分机器人机电教学模式探讨 (20)3.1机器人推荐教学模式及教学理念 (20)3.2提供的资料介绍..............................................................................................................-21-3.3校企合作与培训说明.....................................................................................................-21-3.4机器人实验室针对教师与学生教学效果 (21)II第一部分机器人国外发展概况及人才需求分析1.1机器人国际发展状况机器人技术是多学科交叉与综合的高技术,对国民经济和国家安全具有重要的战略意义,具有广阔的应用前景和市场。
开放课题基金管理办法

机器人技术与系统国家重点实验室(哈尔滨工业大学)开放课题基金管理办法(2016年1月试行稿)一、总则第一条为推动机器人技术领域相关基础研究和技术的自主创新,促进学术交流,发现和培养本领域的科技人才,机器人技术与系统国家重点实验室(哈尔滨工业大学)(以下简称实验室)设立开放课题研究基金(以下简称基金),资助国内外相关技术领域的科技工作者依托本实验室的开放研究环境开展研究工作。
第二条实验室每年定期公布一次《机器人技术与系统国家重点实验室开放研究基金指南》(以下简称《指南》),对每年度资助的具体研究内容作明确界定。
二、资助对象第三条申请者一般应具有高级专业技术职称或博士学位的国内外科技工作者。
第四条实验室接收国内、外研究人员自带课题和经费,利用本实验室设备条件开展科学研究。
第五条实验室开放课题实行合作制,凡在重点实验室申请的开放课题,需有一名实验室固定人员作为合作者,其研究方向与开放课题相近。
合作者负责协调来实验室工作的开放课题人员的实验场地,以及开放课题人员在实验室进行的科研活动。
三、开放课题申请第六条申请采取集中受理方式。
申请课题须符合《指南》资助范围的研究,强调学术思想的新颖性,重点支持有应用前景的创新性基础研究,并鼓励新兴学科方向上的课题申报。
第七条申请者同期只能申请一项,每个项目的申请者限为一人。
申请者和具有高级专业技术职务的项目组主要成员,当年申请及承担(含参加)在研的面上项目数合计不得超过两项。
不具有高级专业技术职务的申请者,当年申请及负责在研的面上项目数合计不得超过一项,但参加项数不限。
第八条基金项目的研究年限一般为二年,具体情况因题而异。
第九条申请课题的研究内容具体,研究方法和技术路线合理、可行,研究目标明确、可考核,经费预算合理。
申请者与项目组成员具备实施该课题的研究能力和时间保证。
第十条开放基金课题一般资助额度每项8-10万元。
第十一条特别优秀的或有明确发展前景的课题可滚动支持。
机器人技术与系统国家重点实验室(哈尔滨工业大学)

机器人技术与系统国家重点实验室(哈尔滨工业大学)开放课题基金管理办法2007年11月30日一、总则第一条为推动机器人技术领域相关基础研究和技术的自主创新,促进学术交流,发现和培养本领域的科技人才,机器人技术与系统国家重点实验室(哈尔滨工业大学)(以下简称实验室)设立开放课题研究基金(以下简称基金),资助国内外相关技术领域的科技工作者依托本实验室的开放研究环境开展研究工作。
第二条实验室每年定期公布一次《机器人技术与系统国家重点实验室20XX 年开放研究基金指南》(以下简称《指南》),对每年度资助的具体研究内容作明确界定。
二、资助对象第三条申请者申请当年的年龄应不超过40岁(含)。
第四条申请者一般应具有高级专业技术职称或博士学位。
具有中级专业技术职务但未获得博士学位的研究人员,经两名具有高级专业技术职务的同行专家推荐,亦可申请。
第五条实验室接收国内、外研究人员自带课题和经费,利用本实验室设备条件开展科学研究。
三、开放课题申请第六条申请采取集中受理方式。
申请课题须符合《指南》资助范围的研究,强调学术思想的新颖性,重点支持有应用前景的创新性基础研究,并鼓励新兴学科方向上的课题申报。
第七条申请者同期只能申请一项,每个项目的申请者限为一人。
申请者和具有高级专业技术职务的项目组主要成员,当年申请及承担(含参加)在研的面上项目数合计不得超过两项。
不具有高级专业技术职务的申请者,当年申请及负责在研的面上项目数合计不得超过一项,但参加项数不限。
第八条基金项目的研究年限一般为二年,具体情况因题而异。
研究工作开始时间为年度的1月1日。
第九条申请课题的研究内容具体,研究方法和技术路线合理、可行,研究目标明确、可考核,经费预算合理。
申请者与项目组成员具备实施该课题的研究能力和时间保证。
第十条基金资助强度一般为2-5万元,根据具体情况因题而异。
由学术委员会和实验室主任审议决定。
第十一条特别优秀的或有明确前景的课题可滚动支持。
国家重点研发计划智能机器人重点专项拟立项的2018年

华南理工大学
汤勇 1350
3
升与验证
个性化图案智能涂装机 内蒙古第一机械集团
19 2018YFB1306300
赵文军 1313
3
器人技术与系统
有限公司
复杂曲面壁板结构搅拌
北京卫星制造厂有限
20 2018YFB1306400 摩擦焊机器人技术及系
陈树君 1370
3
公司
统
面向酿造工艺流程的机 河北衡水老白干酒业
项目实 施周期 (年)
3 3 3 3 3 3 3 3 3 3 3
3
3
3 3
16 2018YFB1306000 工业机器人云平台
阿里云计算有限公司 刘旭东 869
3
工业机器人智能故障诊 17 2018YFB1306100
西安交通大学
雷亚国 841
3
断及健康评估系统
工业机器人整机性能提
18 2018YFB1306200
多模态融合的机器人自 然交互
人机互助型冗余灵巧作 业机器人关键技术与应
用验证 穿戴式外肢体辅助作业
机器人 面向机器人应用的激光 扫描测距仪关键技术研
发与推广应用 机器人用智能六维力和 触觉传感器关键技术及
产业化 面向工业机器人的快速 高精度三维视觉测量技
术与系统 面向服务机器人的三维 视觉传感器研发及产业
黄博
*
面向铸造行业的机器人
智能化生产线研制及在 长沙长泰机器人有限
38 2018YFB1308200
李涵雄 1321
3
航天装备与发动机关键
公司
部件制造上的示范应用
Байду номын сангаас
面向定制式木工家具制
双偏心块驱动球形机器人原地转向运动控制
双偏心块驱动球形机器人原地转向运动控制赵勃;李满天;孙立宁【摘要】Considering the turning in place motion as an independent motion which can enhance the mobility of spherical robot, a turning in place motion control method of two pendulums driven spherical robot is studied. First, the mechanism characteristics of two pendulums driven spherical robot are introduced, and then the force condition of turning in place motion is analyzed based on D~alembertg principle and the motion principle of turning in place motion of two pendulums driven spherical robot is discussed, finally, the dynamic model of turning in place motion is constructed. The whole process of turning in place motion is divided into three stages which are startup stage, stick stage and slip stage respectively, and a stick-slip principle for turning in place motion control is proposed. The effectiveness of the control method is validated by both simulation and prototype experiment.%为了提高球形机器人的运动性能,将原地转向运动作为一种独立的运动方式,研究了一种双偏心质量块驱动球形机器人的原地转向运动控制方法.介绍了双偏心质量块驱动球形机器入的机构特点,利用达朗伯原理对机器人进行受力分析,阐述了双偏心质量块驱动球形机器人原地转向运动原理,建立了机器人的原地转向动力学模型.将原地转向运动分为起始、粘滞、滑移3个阶段,提出了一种基于粘滑原理的球形机器人原地转向控制方法,并通过仿真和样机实验验证了控制方法的有效性.【期刊名称】《哈尔滨工业大学学报》【年(卷),期】2011(043)011【总页数】5页(P49-53)【关键词】球形机器人;双偏心质量块;原地转向;粘滑原理【作者】赵勃;李满天;孙立宁【作者单位】哈尔滨工业大学机器人技术与系统国家重点实验室,哈尔滨150080;哈尔滨工业大学机器人技术与系统国家重点实验室,哈尔滨150080;哈尔滨工业大学机器人技术与系统国家重点实验室,哈尔滨150080【正文语种】中文【中图分类】TP242近几年来,球形机器人作为一种新型移动机器人引起了研究人员越来越多的关注.与轮式、足式移动机器人相比,球形机器人运动灵活,可以实现全方位行走,能够在狭小空间内运动;球形的外壳能够保护内部机构,受碰撞后机器人姿态易于调整,使机器人可以在某些潮湿、多尘、崎岖的恶劣环境下作业[1-2].1999 年卡内基梅陇大学的Brian Chemel等[3]研制了 Cyclops球形机器人,首次将偏心质量块驱动机构应用于球形机器人.驱动单元采用两个垂直放置的电机控制偏心机构运动,通过改变机器人重心位置产生偏心作用力,打破球体的静态平衡实现滚动运动,现有的球形机器人大都采用这种驱动方式.球形机器人在运动时球壳与地面近似点接触,因此带来了运动学方面的非完整约束问题,而球形机器人系统的输入输出之间又存在着强烈的非线性问题,因此近年来球形机器人的研究热点集中于轨迹规划和运动控制.卡内基梅陇大学的Umashankar Nagarajan 等[4-5]研究了 ballbot球形足式机器人的控制方法.通过拉格朗日方程建立了机器人的动力学模型,根据动力学方程推导出机器人腿足之间的相对转角加速度与机器人倾角、倾斜速度之间的关系,提出了基于双曲正割函数的离线轨迹规划方法,并用Nelder-Mead算法对输入曲线进行优化.密歇根州立大学的Ranjan Mukherjee等[6]将球形机器人的运动控制问题与经典的球-平面系统相结合,建立了球形机器人的运动学模型,并用球面三角形法规划了球形机器人的运动轨迹,基于高斯-博内并行传输理论设计了机器人的一般运动控制方法[6].卡内基梅陇大学的Y S XU等[7]通过拉格朗日乘子法对单轮机器人Gyrover进行动力学建模,并用仿真和实验修正了动力学参数.通过对系统进行线性化处理,将机器人的滚动与侧倾运动解耦,由于机器人转向运动只与侧倾角度有关,因此设计了状态反馈控制器保持机器人稳定转向,以间接控制机器人的转弯速度.为了使机器人按照期望轨迹运动,建立了机器人滚动速度、侧倾角度与轨迹曲率半径的关系,并设计了速度反馈控制器确保机器人实际运动轨迹跟踪期望值[8].岳明等[9]研究了球形机器人的爬坡运动控制,基于耗散形式的拉格朗日方程建立了机器人爬坡的动力学模型,通过临界摆角将动力学方程线性化,设计了以能量耗散最小为目标函数的非线性系统控制器.孙汉旭等[10-11]建立了转动关节的摩擦力矩和球壳与地面之间的摩擦力偶,对球形机器人的动力学模型进行修正,设计了基于容错策略的球形机器人控制系统.现有对球形机器人的控制研究没有将球形机器人原地转向运动作为独立的运动方式进行控制,而原地转向运动是球形机器人特有的运动方式,能够使球形机器人在狭小空间内转弯,增强机器人的运动灵活性和环境适应能力.本文研究了一种双偏心质量块驱动球形机器人的原地转向运动控制方法,介绍了机器人的结构特点,并分析了其原地转向运动原理,根据达朗伯原理建立了机器人原地转向运动的动力学模型,提出了一种基于粘滑原理的球形机器人原地转向运动控制方法,最后通过仿真和样机实验验证了控制方法的有效性.1 双偏心质量块驱动单元结构机器人外壳呈椭球形,当机器人发生碰撞或从高处跌落时,这样的外形易于操作者观察到机器人当前的姿态;椭球形的外壳也限制了机器人横向滚动在一定的角度范围,在一定角度的斜坡上穿越时不会翻车.驱动单元是球形机器人的核心部分,现有的球形机器人大都采用了偏心质量块驱动方式,2个垂直放置的电机驱动一个偏心机构运动,分别控制机器人前进和转向,机器人运动灵活,能实现全方位行走.但这种驱动方式也有明显的不足,电机的驱动能力没有得到最大程度上的利用,因此机器人机动速度较慢,原地转向能力差. 设计了一种双偏心质量块驱动单元,其结构如图1所示.驱动单元有2个对轴放置的驱动电机,每个电机分别驱动一个偏心质量块,质量块只能绕电机轴旋转.2个质量块相对于球心对称放置在主轴上,每个偏心质量块质量为350 g,总质量占机器人质量的42.9%,与现有传统的偏心质量块驱动方式相比,这种改进的驱动方式能提供更大的偏心力矩和惯性力矩,使机器人有更快的速度和更灵活的转向能力. 图1 驱动单元结构这种改进的驱动单元也给球形机器人带来了特有的运动原理,如图2所示,分别为机器人运动的侧视图和俯视图.两个质量块m1和m2只能绕x轴转动,相对地面摆角分别为θ1和θ2时,机器人重心位置在MN和PQ交点O1处,当质量块m2摆角为θ3且与θ1反向时,机器人重心位置移动到MN与P'Q'交点O2处.由此可见,两质量块偏摆角度使机器人重心位置改变,但始终在MN上移动,即无论质量块如何偏摆,机器人所受偏心力作用点始终在MN上,产生的偏心力矩绕x轴,因此偏心作用力只能使机器人绕x轴滚动,不能使机器人转向.机器人转向运动需要依靠惯性力,当质量块与球壳相对加速旋转时,会产生平行于yoz平面的惯性力,惯性力可以分解为沿y、z轴的分力和绕x轴的力偶.沿y轴和z轴的分力分别产生绕z轴和y轴的惯性力矩,使机器人绕z轴和y轴旋转.图2 运动原理2 基于粘滑原理的原地转向控制2.1 原地转向运动原理原地转向运动是球形机器人特有的运动方式,可以使机器人在狭小空间内运动,增强其环境适应能力.双偏心质量块驱动球形机器人原地转向运动受力情况如图3所示.图3 原地转向运动受力分析两质量块反向旋转相同角度θ,保证角速度θ˙与加速度θ¨相同,因此惯性力Fg1与Fg2大小相等,方向为垂直于质量块转动半径.将惯性力分解为沿y轴和z轴的分力,其中分别产生绕x轴大小相等方向相反的惯性力矩与绕 y轴大小相等方向相反的惯性力矩Fyg2产生绕z轴大小相等方向相同的惯性力矩,式(1)为机器人受力情况,其中Mf为地面摩擦阻矩.由式(1)可以看出,机器人只受绕z轴的惯性力矩作用,其他方向上所受惯性力与力矩都平衡,因此机器人只有一种运动方式.当绕z轴的惯性力矩大于摩擦阻矩Mf 时,机器人做原地转向运动.2.2 原地转向动力学模型质量块相对球壳加速运动产生的惯性力为其中:r为质量块旋转半径,θ为质量块与球壳绕x轴的相对转角,在原地转向运动中,由于球壳不会绕y轴旋转,因此θ即为质量块转角.惯性力矩为其中d为质量块旋转中心到球心的距离.由达朗伯原理,得到机器人原地转向运动动力学方程如下:其中φ为机器人绕z轴的转角.2.3 基于粘滑原理的原地转向控制由原地转向动力学模型可知,可以通过控制质量块摆角θ控制机器人原地转向运动.从质量块的位置考虑,系统要求在转动的初始和终止时刻质量块都处于铅直位置,一方面可以使机器人在原地转向的终止时刻立即进入下一个运动状态的起始位置;另一方面可以在相同的初始位置控制质量块的运动.将原地转向运动分为3个阶段进行控制,分别为起始阶段、粘滞阶段、滑移阶段,其具体控制过程如下:1)起始阶段:保持两偏心质量块处于竖直位置,不施加任何驱动信号,机器人处于静止状态.2)粘滞阶段:0~t1时间段,给质量块施加一个缓慢上升的速度驱动信号,如图4所示,质量块开始绕x轴同步反相缓慢摆动,由于两质量块摆动产生的绕z轴的惯性力矩Mzg始终小于最大静摩擦阻矩Mf,即地面有能力提供球壳静止所需的摩擦阻矩,此时球壳将与地面保持静止,机器人处于粘滞状态,质量块旋转至θ角度,等待下一步控制信号.图4 粘滞阶段3)滑移阶段:在粘滞阶段的终了时刻t1,单摆的速度驱动信号急速下降,t1~t2时间段,两质量块从θ位置回摆到竖直位置,如图5所示,质量块产生的惯性力矩Mzg超过了球壳与地面间的最大静摩擦阻矩Mf,球壳做原地转向运动,机器人处于滑移阶段.当摩擦阻矩耗散掉机器人全部动能时,球壳停止运动,即重新回到静止阶段,如此一个原地转向运动周期结束.图5 滑移阶段2.4 原地转向运动控制仿真用Matlab对原地转向控制方法进行仿真,仿真时间为3 s,仿真中机器人参数如表1所示.表1 机器人参数参数质量块总质量/kg其他机构总质量/kg球壳转动惯量/(kg·m -2)质量块旋转半径/m质量块旋转中心到球心距离/m数值0.70 0.93 0.002 9 0.038 0.045摩擦阻矩模型为其中,Mstatic为静摩擦阻矩,Dv为黏性阻尼系数,在室内相对平坦的地面通过实验测得Mstatic=0.014 24 N·m,Dv=0.057 N·m·s/rad.仿真中摆角θ控制轨迹为其中,θm为质量块摆角最大值,ω为谐波频率,Kv为转速系数,可以通过调整Kv的大小控制质量块角速度的最大值,Kf为变频系数,可以改变滑移阶段质量块回摆时间,控制滑移阶段质量块产生惯性力的大小,取θm= π/6,ω = π/0.8,Kv=2,Kf=4,质量块摆角曲线与速度曲线如图6所示.摆角曲线上升时,机器人处于粘滞阶段,质量块先加速后减速,摆动到θm位置,摆角曲线下降时机器人处于滑移阶段,质量块先加速后减速回摆至竖直位置,质量块在滑移阶段的最大速度是粘滞阶段的4倍,最大加速度是粘滞阶段的16倍,也就是质量块在滑移阶段能产生16倍于粘滞阶段的惯性力,使机器人完成原地转向运动.机器人原地转向运动仿真结果如图7所示,实线和虚线分别为球壳绕z轴转角φ的位移曲线和速度曲线.可以看出,在0~0.8 s时间段,机器人处于粘滞阶段,球壳角位移为0,在0.8~1.0 s时间段,机器人处于滑移阶段,球壳先加速后减速,角速度最大值为2.74 rad/s,球壳角位移为0.28 rad,机器人原地转向运动周期为1 s.仿真中摩擦模型为理想模型,因此机器人进入粘滞阶段时立即停止转动,球壳角速度为零,角位移不变.图6 质量块摆角与角速度仿真曲线图7 球壳角位移与角速度曲线3 原地转向运动实验研究在室内地面进行了双偏心质量块驱动球形机器人原地转向运动实验研究,通过遥控机对机器人下达“原地转向”指令,实验中质量块输入信号及其参数设置与仿真中一致,实验结果如图8所示,机器人能完成原地转向运动.机器人原地转向角速度通过传感器测量结果如图9所示,机器人原地转向运动周期为1 s,质量块启动瞬间,由于角动量守恒,惯性力矩产生机器人反向的角速度,即在运动初始时刻机器人转向方向与期望方向相反,但这种反向运动在短时间内即可被地面摩擦力矩阻止.从图中可以看出,机器人在滑移阶段之后,转动角速度无法立即减为零,即实验中地面的摩擦阻矩无法使机器人在粘滞阶段的初始时刻立即静止,摩擦阻矩对机器人运动的阻止需要0.5 s的时间,因此机器人在粘滞阶段也有一小段角位移.实验中机器人除了做原地转向运动之外,还有周期性绕y轴的转动,即横滚运动,横滚角速度通过传感器测量,结果如图10所示.机器人原地转向运动通过2个质量块产生2个大小相等、方向相反的惯性力实现,而实验中无法保证2个质量块无误差的同步运动,因此沿z轴的惯性力产生了绕y轴不平衡的惯性力矩,使机器人有横滚运动.偏心质量块在滑移阶段产生最大惯性力,从图10中可以看出,机器人在滑移阶段的横滚角速度最大,最大值可达0.78 rad/s,粘滞阶段由于能量耗散,横滚角速度逐渐减小,但在0.8 s内无法减为零,机器人进入下一个滑移阶段.因此在原地转向运动过程中,机器人不可避免地带有横滚运动.图8 原地转向运动实验研究图9 球壳角速度图10 横滚角速度4 总结1)原地转向运动是球形机器人特有的运动,能够增加球形机器人的环境适应能力,本文将原地转向运动作为一种独立的运动方式,研究了双偏心质量块驱动球形机器人的原地转向运动控制方法.2)分析了机器人原地转向运动原理,利用达朗伯原理建立了机器人原地转向运动动力学模型,提出了一种基于粘滑原理的原地转向运动控制方法,并通过仿真从理论上证明了控制方法的正确性.3)进行了样机试验研究,分析了实验结果,通过实验验证了控制方法的有效性.参考文献:[1]HALME A,SCHONBERG T,WANG Y.Motion control of a spherical mobile robot[C]//IEEE International Workshop on Advanced Motion Control.MIE,Japan:IEEE,1996:259-264.[2]ARMOUR R H,VINCENT J F V.Rolling in Nature and Robotics:A Review[J].Journal of Bionic Engineering,2006,3(4):195-208.[3]CHEMEL B,MUTSCHLER E,SCHEMPF H.Cyclops:miniature robotic reconnaissance system[C]//IEEE International Conference on Robotics and Automation.Detroit,MI,USA:IEEE,1999:2298 -2302.[4]UMASHANKAR N,GEORGE K,RALPH L H.Trajectory planning and control of an underactuated dynamically stable single spherical wheeled mobile robot[C]//IEEE International Conference on Robotics and Automation.Kobe,Japan:IEEE,2009:3743-3748.[5]UMASHANKAR N,ANISH M,GEORGE K,et al.State transition,balancing,station keeping,and yaw control for a dynamically stable single spherical wheel mobile robot[C]//IEEE International Conference on Robotics and Automation.Kobe,Japan:IEEE,2009:998-1003.[6]MUKHERJEE R,MARK A M,PUKRUSHPAN J T.Motion planning for a spherical mobile robot:revisiting the classical ball-plate problem[J].Journal of Dynamic Systems,Measurement and Control,Transactions of the ASME,2002,124(4):502-511.[7]XU Y S,SAMUEL K W.Stabilization and path following of a single wheel robot[J].IEEE/ASME Transactions on Mechatronics,2004,9(2):407-419.[8]FERREIRA E,TSAI S J,PAREDIS C J J,et al.Control of the Gyrover:a single-wheel gyroscopically stabilized robot[J].Advanced Robotics,2000,14(6):459-475.[9]岳明,邓宗全.球形机器人爬坡状态下动力学建模及最优控制器设计[J].机械工程学报,2009,45(11):46-51.[10]孙汉旭,王亮清,贾庆轩,等.BYQ-3球形机器人的动力学模型[J].机械工程学报,2009,45(10):8-14.[11]孙汉旭,刘大亮,贾庆轩,等.基于容错策略的球形机器人控制系统[J].机械工程学报,2010,46(11):89-95.。
哈尔滨工业大学机电工程学院
附件:工程硕士招生领域介绍085201机械工程(所属院系:机电工程学院、媒体技术与艺术系、深圳研究生院机电工程与自动化学院、威海校区船舶与海洋工程学院)机械工程专业是哈尔滨工业大学历史最悠久的专业之一,创建于1920年。
机电工程学院设有13个系、部、中心、研究所,并设有先进机器人技术与系统国家重点实验室等一批国家和省部级人才培养和科学研究基地。
学院在机械工程国家一级重点学科下的机械电子工程、机械制造及其自动化、机械设计及理论、车辆工程、工业工程、精密与微纳制造6个二级学科和航空宇航制造工程二级学科招收博士和硕士研究生,并设有机械工程博士后科研流动站。
机电工程学院现有教职工400余人,其中中国工程院院士2人、国家教学名师1人,长江学者特聘教授5人、国家杰出青年科学基金获得者3人、教授80人,博士生导师87人。
学院现有学生2380人,其中博士生406人,硕士生702人,本科生1272人。
自1998年以来已连续招收工程硕士1243名,授予学位589名。
近五年,学院承担和完成科研项目580余项,其中国家级科研项目130余项,每年科研经费达2亿元左右,获得国家科技奖3项、省部级奖38项,获得国家发明专利200余项。
学院具有良好的国际合作基础。
近年来先后与多所国外高校和研究机构建立了良好的合作关系,并开展了广泛的学术交流与合作。
学院每年将选派一定数量的研究生和本科生赴美、欧、日本、俄等国外一流大学留学或进行合作研究。
历史悠久的机电工程学院将在日益广泛的国际化交流与合作中再创辉煌。
机械制造及其自动化学科(机电工程学院)机械制造及其自动化学科是国内同类学科中最早建立的,也是全国首批硕士点和博士点(1981年)、首批全国重点学科(1988年)、2007年全国重点学科评估中再次被评为全国重点学科,是“211工程”(一、二、三期)和“985工程”(一、二期)重点建设的学科和长江学者计划特聘教授首批岗位设置学科(1998年),其所属的哈尔滨工业大学机械工程一级学科,1987年建立了博士后流动站。
董为导师简介董为1978年2月生男工学博士副教授博士生

董为
导师简介:董为,1978年2月生,男,工学博士,副教授,博士生导师,IEEE 会员、SPIE会员。
2007年8月毕业于哈尔滨工业大学机器人研究所,获工学博士学位。
2007年11月至2009年7月,在美国康涅狄格大学(University of Connecticut)机械工程系进行博士后研究工作。
2009年9月至2010年8月,在法国国家科学研究技术中心(CNRS)弗朗西孔泰机电光热学研究所(FEMTO-ST)进行博士后研究工作。
2010年9月起,任职于哈尔滨工业大学机器人技术与系统国家重点实验室(哈尔滨工业大学海外引进人才计划)。
为多个著名国际期刊及国际会议的论文评阅人。
目前,主持国家自然科学基金项目2项、主持及参与863计划项目3项,申请人主要从事柔性机器人、并联机器人、工业机器人等方面的研究。
发表文章50余篇,其中SCI检索源14篇。
计划招收硕士(1)
计划招收硕士(2)。
付宜利导师简介付宜利19606月出生机械电子工程学科教授
付宜利
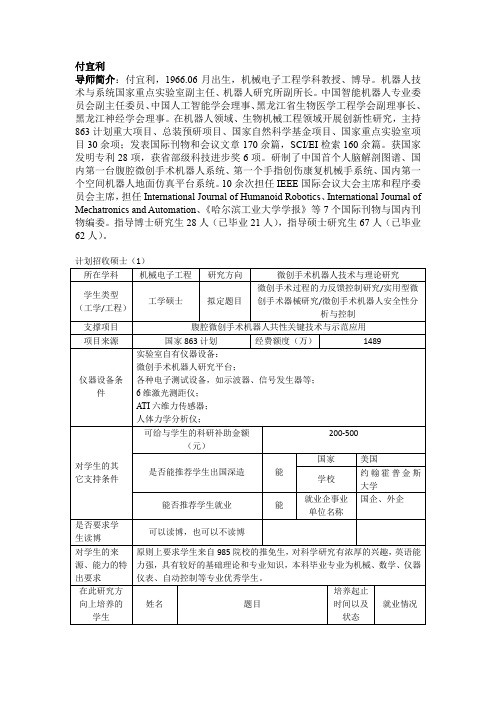
导师简介:付宜利,1966.06月出生,机械电子工程学科教授、博导。
机器人技术与系统国家重点实验室副主任、机器人研究所副所长。
中国智能机器人专业委员会副主任委员、中国人工智能学会理事、黑龙江省生物医学工程学会副理事长、黑龙江神经学会理事。
在机器人领域、生物机械工程领域开展创新性研究,主持863计划重大项目、总装预研项目、国家自然科学基金项目、国家重点实验室项目30余项;发表国际刊物和会议文章170余篇,SCI/EI检索160余篇。
获国家发明专利28项,获省部级科技进步奖6项。
研制了中国首个人脑解剖图谱、国内第一台腹腔微创手术机器人系统、第一个手指创伤康复机械手系统、国内第一个空间机器人地面仿真平台系统。
10余次担任IEEE国际会议大会主席和程序委员会主席,担任International Journal of Humanoid Robotics、International Journal of Mechatronics and Automation、《哈尔滨工业大学学报》等7个国际刊物与国内刊物编委。
指导博士研究生28人(已毕业21人),指导硕士研究生67人(已毕业62人)。
计划招收硕士(1)
腹腔微创手术机器人系统关键技
磁锚定腹腔内手术机器人结构设基于电磁定位的血管介入手术图腹胸腔微创手术机器人远心机构微创手术器械力传感器设计
微创手术机器人被动式关节一体微创手术机器人操作主手设计与
计划招收硕士(3)
下肢助力外骨骼机构设计与研究。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
机器人技术与系统国家重点实验室(哈尔滨工业大学)
开放课题基金管理办法
2007年11月30日
一、总则
第一条为推动机器人技术领域相关基础研究和技术的自主创新,促进学术交流,发现和培养本领域的科技人才,机器人技术与系统国家重点实验室(哈尔滨工业大学)(以下简称实验室)设立开放课题研究基金(以下简称基金),资助国内外相关技术领域的科技工作者依托本实验室的开放研究环境开展研究工作。
第二条实验室每年定期公布一次《机器人技术与系统国家重点实验室20XX 年开放研究基金指南》(以下简称《指南》),对每年度资助的具体研究内容作明确界定。
二、资助对象
第三条申请者申请当年的年龄应不超过40岁(含)。
第四条申请者一般应具有高级专业技术职称或博士学位。
具有中级专业技术职务但未获得博士学位的研究人员,经两名具有高级专业技术职务的同行专家推荐,亦可申请。
第五条实验室接收国内、外研究人员自带课题和经费,利用本实验室设备条件开展科学研究。
三、开放课题申请
第六条申请采取集中受理方式。
申请课题须符合《指南》资助范围的研究,强调学术思想的新颖性,重点支持有应用前景的创新性基础研究,并鼓励新兴学科方向上的课题申报。
第七条申请者同期只能申请一项,每个项目的申请者限为一人。
申请者和具有高级专业技术职务的项目组主要成员,当年申请及承担(含参加)在研的面上项目数合计不得超过两项。
不具有高级专业技术职务的申请者,当年申请及负责在研的面上项目数合计不得超过一项,但参加项数不限。
第八条基金项目的研究年限一般为二年,具体情况因题而异。
研究工作开始时间为年度的1月1日。
第九条申请课题的研究内容具体,研究方法和技术路线合理、可行,研究目标明确、可考核,经费预算合理。
申请者与项目组成员具备实施该课题的研究能力和时间保证。
第十条基金资助强度一般为2-5万元,根据具体情况因题而异。
由学术委员会和实验室主任审议决定。
第十一条特别优秀的或有明确前景的课题可滚动支持。
四、开放课题评审与批准
第十二条实验室对开放课题进行初审,对于不符合申请条件的基金申请书不予报送学术委员会。
第十三条实验室学术委员会以会议或书面通讯评议方式对基金申请项目进行评审,每项申请一般由3位委员进行评审。
根据择优资助的原则,批准资助课题及资助额度。
第十四条实验室将学术委员会的评审结果报送主管部门。
第十五条根据评审结果,由实验室主任于每年1月签发立项批准书,通知申请者及其所在单位。
五、项目的实施与管理
第十六条申请者接到项目批准通知后,须按批准意见撰写资助项目计划书。
逾期不报且在规定期限内未说明理由的项目,视为自动放弃。
第十七条研究计划实施中,涉及到预定目标、研究内容、计划实施等的改变、以及提前结题或延长年限等变动,项目负责人须提出报告,经所在单位审查签署意见后,报实验室审批。
第十八条一般情况下,项目负责人不得代理或更换,遇有特殊情况,所在单位应安排合适代理人,并报实验室备案。
项目负责人工作调动,可依据具体情况选择在原单位或调入单位完成基金项目,但须调入、调离双方及实验室签署意见,并报实验室审批及备案。
第十九条实验室每年度对基金项目的执行情况进行检查。
项目负责人应于每年度结束时提交《基金资助项目年度进展报告》。
对不报送进展报告、工作无进展、经费使用不当的项目,缓拨下期经费。
项目负责人如不能纠正、补报,实验室将中止资助。
第二十条因客观原因不能在规定期限内完成研究计划的项目,一般允许延期一次,期限不超过1年,但须在项目原执行期结束前两个月提出申请,由项目依托单位签署意见,报实验室审批。
第二十一条基金项目完成后,项目负责人填写项目结题报告,三个月内向实验室报送《机器人技术与系统国家重点实验室开放课题基金资助项目总结报告》,学术论文复印件及有关的软硬件原始资料。
实验室学术委员会将对开放课题完成情况进行评议,对优秀研究成果将颁发“优秀成果证书”。
向实验室提交的材料包括:
(1)项目结题报告;
(2)项目技术总结报告(格式自拟);
(2)发表学术论文复印件;
(3)著作、专利与获奖成果证书复印件;
(4)课题研究过程中的原始记录、技术档案、资料及其目录清单。
第二十二条实验室按年度检查课题执行情况,发现完不成或原计划方案有问题时,有权暂时中止,调整或取消基金资助。
六、课题成果归属
第二十三条属开放基金资助的课题所取得的论文、专利、奖项等成果,归实验室和研究者所在单位共有。
第二十四条属开放基金资助的课题的研究成果申报和论文发表时的单位署名必须有“机器人技术与系统国家重点实验室(哈尔滨工业大学)”,英文为“State Key Laboratory of Robotics and System (HIT)”。
一般情况下,要求基金资助课题至少发表1篇SCI论文或2篇EI论文。
第二十五条属开放基金资助的课题的有关论文、专著、成果等,均应标注“机器人技术与系统国家重点实验室开放研究项目资助”字样,英文为:Supported by State Key Laboratory of Robotics and System (HIT)。
第二十六条属开放基金资助的课题所取得的论文、专利、奖项等成果,归研究者所在单位,但必须在研究成果及论文中注明“机器人技术与系统国家重点实验室开放研究项目资助”字样,英文为:Supported by State Key Laboratory of Robotics and System (HIT)。
第二十七条鼓励已获得本实验室开放基金资助开展的研究项目继续申请更高层次的基金、攻关和其它重大项目。