一种新型四轴搜救飞行器设计_张鹏
第七届大创立项统计表-公布版
201310006100 201310006101 201310006102 201310006103 201310006104 201310006105 201310006106
从“缺失的井盖”看井盖的管理问题--以北京市昌平区为研究对 创新训练项目 刘琼 象 具有RFID功能的RC车模计时系统设计与制作 创新训练项目 刘家曦 自行车娱乐平台(BikeTraveller) 创新训练项目 郑嘉雷 远程监控机器人 创新训练项目 朱晨 创业实践 “佼脚者”计划 潘琛 项目 基于无人机技术的农用飞防应用项目 基于三轴云台的直升机航拍系统 创业实践 项目 创业实践 项目 宋贺腾 王亚龙
自适应像素填充应用技术 地理围栏概念下的LBS系统 个性化聊天表情生成软件 大学生旧书旧物出售网络平台 全功能勘探车结构及控制研究 便携式插头 新型油阻式离合器 基于VR虚拟现实的图景导航应用 民航起降阶段防鸟撞装置 应用机器视觉的SLAM小车设计 全局视觉导航的特种飞行机器人 北京高校校园手机充电机布局的最优规划与仿真模拟 我国城市经济发展二元驱动模式的比较研究
创立项统计表
项目负责人 11011137 项目其他成员信息(姓名和学号) 指导教师姓 财政拨款 学院 名 李岩 沈志刚 李松梅 游文彬11011125 李雪缘10021079李胜曦10021214祝贺 10101026 张曦11021173 彦晓宇10021222 白璐 10021088 李雁雯11021143 王启濛11021180;冯柏源11021191 南丁11021069 王子钰12021181 朱晨 11021072 曹竞超11021052 王越11021152 冯采 11021053 杨韧12021063 陈玉莹12021114 杨宝翔 12021109 杨重阳12031139 樊峻崧12031146 赵力 12031149 王辰元 12031140 吴易霖(12031230) 唐哲文12031199、张益鑫39032517、王 梦莹12291160 苏翔博(11031140)、李锁兰 (11031132)、马仲海11031149) 袁野11081118、李梦奇11031127、李垚 11081105、李赟11081127 秦建(10051068) 龚雨晋10041177 刘有炜12041034 庞岩(10041007) 任鹏 10041051 李德政 10041011 刘贵艺11041045 纪国圣11041039 龚雨晋10041177 刘佳思12041036 孙思昊(10051128)邓颖 (10051053)罗天航(10051037) 乔冬冬10051024朱少雄10051006王龙 10051025张莉雯11291121 涂章杰(10051245)胡达达 (10031040)丁伟(10051264) 张鑫(10051001) 纪佳正(10051008) 陈爽爽(10051014) 王乾威10051107秦玉培10051129 李晓敏10051096曹顺翔10051110 陈杰10051142,陈拓10051138, 王照瑞10051105 张啸迟10051168、章异嬴10051043、石 明轩10051077、黄帅10151117 10131064夏正林;11061065冮一江 11061017夏天晗;11061025李鲲 顾轶卓 刁为民 金天 赵巍 张波 王俊 金天 黄勤 袁梅 王少萍 王少萍 段海滨 袁梅 丁水汀 张弛 陈龙飞 方祥军 孙纪宁 董金钟 王维军 黄俊 王延奎 孙明磊 王维军 陈铭 万志强 荣文戈 胡春明 许兴 10000 9000 15000 15000 15000 8000 9600 9000 12000 8000 9200 18000 15000 14000 12000 9000 15000 18000 10000 15000 8000 8000 10000 6000 9000 5000 9000 9000 15000 8000 8000 4000 1 1 1 1 2 2 2 2 2 2 2 3 3 3 3 3 4 4 4 4 4 4 5 5 5 5 5 5 5 6 6 6 王煜坤 11011043 谢敏灵 11011034 丁 文宇11011130 11011083 井京 11011085 10011097 11011135 10021079 11021116 11021150 11021173 11021234 11024002 12021138 12031144 11031105 11031115 11031138 11031187 10041173 11041028 10041021 10041003 11041057 12041034 10051008 10051018 10051252 10051002 100513 10051140 11051194 10131061 11061028 11061125
四轴飞行器(研究性学习省一等奖)资料
调试,直到试飞,全方位整理和了解了四轴飞行 器的控制原理和技术。实践也证明了我们的执着 努力获取了成功,我们体验了设计、制作与试飞 的过程,也收获了成功的喜悦!
谢谢观赏
Thanks for listening
完单平成边倾飞加斜速
方启案发设计
——机身设计
玻纤板设计
3D建模
方案设计
——机臂材料
ABS工程塑料
铝方管
方案设计
——起落架
方案一
方案二
元件启加发工
机床加工
切割碳棒
组启装发机身
传感启器发校准
加速度校准
首次试飞
问题与解决
——锁定问题
内部程序 修改一览
PID参数调节
简介:PID控制是基于微 积分学为基础的数字化 自动控制方式,P代表比 例,I代表积分,D代表 微分。它以传感器采集 的数据作为输入源,按 预定的PID参数根据特定 的公式计算以后输出控 制。
航启 拍发 集锦
前景展望
实时图传
——无限范围
前景展望
太阳能电池
——无限动力
启 感发 想
通过四研轴究飞性行学器习,活在动,我我们们没体有会自到己了团亲队自合动作手的制力作 量,之也前形,成仍了还团只队是协作一的种意遥识远。的同概时,念也。培而养现了在我,们我科们 学严通谨过、研一究丝性不学苟习的科活学动精,神针。对在四今后轴的飞学行习器、的工设作计中与 ,我制们作要展把开这了种专精题神继研续究保,持从和设发计扬下、去制,作更,希到望编将程来、
多功能四轴飞行器
设计与制作
指导老师:余志刚
组员:张英特 丁一平 沈宇哲 刘执恒 陈宇昊 曹智一 姚威 卜尔豪
基于STM32的微型四轴救援机的设计与实现
Abstract:The rescue aircraft designed in this paper uses STM32 as the main control chip,four-axis UAV as the carrier,uses wireless module to control,human life detection module to detect,and GPS module to locate,in order to achieve the purpose of rescue. The human body detection module carried by four-axis UAV is used to detect a certain area. When the disaster victims are detected,the module will send signals to the main control chip,and then the main control chip will feedback the location of the disaster victims to the rescuers in time. Then the wireless pair can be used before the rescuers arrive at the search and rescue site. The speech module can comfort and guide the trapped personnel,thus greatly improving the efficiency of rescue work.
飞行器本科毕业论文选题(1299个)
飞⾏器本科毕业论⽂选题(1299个)毕业论⽂(设计)题⽬学院学院专业学⽣姓名学号年级级指导教师毕业教务处制表毕业⼆〇⼀五毕业年⼗⼆⽉毕业⼀⽇飞⾏器与毕业论⽂选题(1299个)⼀、论⽂说明本写作团队致⼒于毕业论⽂写作与辅导服务,精通前沿理论研究、仿真编程、数据图表制作,专业本科论⽂300起,具体可以联系⼆、论⽂参考题⽬《鲁班的飞⾏器》围绕旋翼飞⾏器的三维结构化运动嵌套⽹格⽣成⽅法单兵飞⾏器往事低空飞⾏器在⼤⽐例尺地形测图中的实践与应⽤全对称⽮量推进飞⾏器美军⾼超⾳速飞⾏器有两个技术路线机翼可折叠的飞翼布局飞⾏器验证机基于SolidWorks和ANSYS的⼀种四旋翼飞⾏器旋翼的设计及分析基于⽓动舵⾯和RCS融合控制的⾼超声速飞⾏器再⼊姿态容错控制基于WiFi AP模式下的多轴飞⾏器数据传输系统设计多飞⾏器⾃适应编队制导控制技术吸⽓式⾼超声速飞⾏器控制研究综述基于数字地图预处理的飞⾏器航迹规划未来飞⾏器可海空两⽤⾼超⾳速飞⾏器能穿透导弹防御基于复合材料的⼋旋翼飞⾏器设计四轴飞⾏器的研究与设计四旋翼飞⾏器飞⾏控制专利申请现状及审查应⽤实例分析美国“未来飞⾏器”基于STM32的四旋翼飞⾏器姿态测量系统设计太阳能混合动⼒飞⾏器的设计与制作基于四旋翼飞⾏器的制药车间温湿度监测基于GPS的四旋翼飞⾏器研究设计四旋翼飞⾏器悬停控制的研究派诺特Bebop Drone四轴飞⾏器专题测试灵巧的“⼤眼睛”美国空军成功发射第4架次X—37B轨道测试飞⾏器六旋翼飞⾏器平稳着陆⽅法研究⼀种⽆⼈飞⾏器测控信道初步设计“创新杯”第六届全国未来飞⾏器设计⼤赛获奖作品选登神秘的飞⾏器基于蓝⽛串⼝的多旋翼飞⾏器遥控系统设计微型飞⾏器发展现状与关键技术基于ARM的四旋翼飞⾏器设计基于四轴飞⾏器的运载机器⼈设计浅谈对飞⾏器转弯飞⾏导航控制的研究航天飞⾏器⾦属结构的制造⼯艺及检验⽅法研究多旋翼飞⾏器发展概况研究初玩四轴飞⾏器多轴飞⾏器装机经验谈普通院校飞⾏器设计与⼯程专业⼯程应⽤型⼈才培养“中航⼯业杯”⽆⼈飞⾏器Yuneec Q500航拍⼀体飞⾏器Zano微型航拍四轴飞⾏器航天战术飞⾏器质量管理信息系统分析设计智能测污飞⾏器安卓⼿机遥控电动A4纸折微型飞⾏器总体设计为飞⾏器摄影⽽⽣:空中摄影附件⼤⽐拼浅谈⼩型低速航空飞⾏器造型美学基于DSP的多轴⽆⼈飞⾏器设计亚拓M690L多轴飞⾏器浅析电动多旋翼飞⾏器的设计及其在农业领域中的应⽤⼀种⾼级飞⾏器测试数据时域判读⽅法⾼超声速飞⾏器上升段轨迹优化了不起的飞⾏器微型飞⾏器的⼩幅运动⽓动⼒建模研究六旋翼飞⾏器容错控制算法我最喜欢的玩具——愤怒的⼩鸟发光感应飞⾏器折叠式飞⾏器机翼展开装置的技术研究⾼超⾳速飞⾏器⽓动热研究进展新型四旋翼飞⾏器设计与制作某型海⾯飞⾏器⽤阀门断裂原因的失效分析另类“单⼈飞⾏器”⽆⼈旋翼飞⾏器⾃适应飞⾏控制系统设计多功能探测智能四轴飞⾏器的研制分析亚拓M480L多轴飞⾏器基于⽆⼈飞⾏器和GIS的防汛抗旱监测系统基于ANSYS的四轴飞⾏器机架振动分析四旋翼飞⾏器多传感器硬件的电路设计基于PID神经⽹络的四旋翼飞⾏器控制系统研究输电线路精细化故障查找飞⾏器研制及应⽤⼩型四轴飞⾏器控制器设计的研究校园空中监管四轴飞⾏器的设计动⼿做⽓球飞⾏器新型涵道⽆⼈飞⾏器飞⾏控制策略研究基于四轴飞⾏器的PID姿态控制系统基于X—Bee和STM32F407的四轴飞⾏器设计基于飞⾏器的复杂零件⾃动加⼯及组装技术的研究飞⾏器坠海咋打捞?四旋翼飞⾏器飞⾏轨迹的仿真研究视觉导航的四轴飞⾏器控制系统设计农⽤⽆⼈遥控飞⾏器优势和效益分析可续航三栖探测飞⾏器系统设计与实现基于DSP的四旋翼⽆⼈飞⾏器控制系统基于WIFI的智能多功能微型四旋翼飞⾏器设计四轴飞⾏器的姿态研究与设计基于ARM的⼀种⽆⼈航拍旋翼飞⾏器设计“空中牧⽺⽝”让飞⾏器竞赛更具挑战与趣味性⼀种垂直起降飞⾏器四旋翼飞⾏器的设计与仿真分析北京航天长征飞⾏器研究所“图像去模糊技术”国际领先扑翼式飞⾏器的发展与展望飞⾏器健康监控的概念及其发展飞翔的歌利亚:超级飞⾏器狂想⾼超声速飞⾏器建模研究基于分布估计算法的弹性飞翼飞⾏器多操纵⾯控制分配基于Multiwii的开源四轴飞⾏器⼀种新型⽆⼈机⼩型化飞⾏器管理计算机的设计实现美空军科学咨询委员会评估⾼超声速飞⾏器技术成熟度基于OPC技术的飞⾏器测试与控制系统设计Mil—1394b总线在飞⾏器管理系统中的典型应⽤分析飞⾏器供电系统最⼤功率跟踪与测试技术研究微型飞⾏器悬臂谐振分析⾼空长航时飞⾏器⾃主导航系统研究及试验验证电动多旋翼飞⾏器的特点及其在农业中的应⽤带魔⼒的球球飞⾏器⽤KT板制作四轴飞⾏器机架的可⾏性电⼒巡线⽤四旋翼飞⾏器软硬件设计地效飞⾏器的发展及其军事应⽤⾃动航⾏飞⾏器设计变结构飞⾏器的故障诊断与容错控制盘点全球⼋⼤奇葩飞⾏器从中国⾼超声速导弹试验谈亚轨道飞⾏器⼀种警⽤可折叠六旋翼飞⾏器设计漫谈多轴飞⾏器的操纵⽅式基于Fluent的飞⾏器⽓动参数计算⽅法基于STM32单⽚机的三叶浆四旋翼飞⾏器设计四轴飞⾏器仿真系统设计滑翔飞⾏器威胁区规避算法研究魔⽅型深空探测飞⾏器未来变体⽆⼈飞⾏器的关键技术太空飞⾏器的空⽓动⼒学数据新型飞⾏器航空飞⾏器的结冰与防冰四旋翼飞⾏器控制系统设计基于⼿机WIFI通信的空中探测飞⾏器研制基于GPS及光流传感器的四旋翼飞⾏器四翼飞⾏器⽤于紧急运输的⽹络设计低空探测飞⾏器的改装及其在现代⽓象服务中的应⽤四旋翼飞⾏器增稳混合控制器求破解之法⾼超声速飞⾏器的拦截和防御基于⼴义逆矩阵求解的空间飞⾏器的定位7旬⽼⼈欲研制出⽆动⼒飞⾏器微型旋翼飞⾏器的现状分析和发展趋势初探英国⼈设计“怪物”飞⾏器结合飞艇、飞机、直升机的世界最长飞⾏器基于PIV原理的微型扑翼飞⾏器流场试验台遥控飞⾏器航拍在建设⼯程中的应⽤基于Mahony滤波器和PID控制器的四旋翼飞⾏器姿态控制飞⾏器制造⼯程专业教学⽅法改⾰模式研究⾼超声速飞⾏器的滑模预测控制⽅法⾼超⾳速飞⾏器引领空天武器新趋势飞⾏器⾥的好⼩伙多学科设计优化算法及其在飞⾏器设计中应⽤太阳帆飞⾏器⾃适应极点配置控制⽅法研究低空飞⾏器即时航迹评估⽅法及模型⾼空飞⾏器供油驱动系统IGBT模块结温特性研究综合化飞⾏器管理计算机技术研究虚拟制造技术在飞⾏器设计中的应⽤⽆⼈机飞⾏器通信链路抗⼲扰性能⽐较研究四旋翼⾃主飞⾏器系统发展中的飞⾏器射频隐⾝技术⼈造昆⾍——微型飞⾏器飞⾏器:作为艺术的喷⽓机飞⾏器设计的多参数决策matlab的模拟实现马丁飞⾏器宫崎骏关键词:少⼥,森林,飞⾏器四旋翼⾃主飞⾏器私⼈航天飞⾏器各显神通传说中的磁单极飞⾏器基于FPGA的⽆⼈飞⾏器温度巡检装置的设计蜂窝与太空飞⾏器地效飞⾏器周围流体场数值模拟国外⾼校浮空飞⾏器学⽣创新实践活动的发展与启⽰飞⾏器⼤型薄壁件制造的柔性⼯装技术临近空间⾼超声速飞⾏器建模与控制研究进展⾼速飞⾏器直接⼒/⽓动⼒复合控制技术综述多旋翼飞⾏器在输电线路巡维的应⽤飞⾏器⽼牌电⽓公司的飞⾏器德国西门⼦-舒克特SSW D.III/D.IV战⽃机关于脑电波控制飞⾏器的研究现状概述基于粒⼦群算法的再⼊式飞⾏器再⼊⾛廊计算⽅法研究⼀种飞⾏器测控电源的实时监测装置设计与实现⾼超⾳速飞⾏器呼之欲出基于科研资源向教学资源转化的飞⾏器结构⼒学的本科教育研究与实践飞⾏器吸⽓式⾼超声速飞⾏器纵向运动反演控制器设计四轴飞⾏器⽆刷直流电机驱动技术研究康达效应飞⾏器研究及应⽤飞⾏器的那些事SINS/CNS组合导航对⾼空飞⾏器再⼊精度的影响有输⼊饱和的⽋驱动VTOL飞⾏器滑模控制飞⾏器跳“龙门”临近空间飞⾏器发展概况外星飞⾏器没有来!俄研制新型地效飞⾏器“驭波者”来袭美国空军X—51A⾼超⾳速飞⾏器试验成功基于改进互补滤波器的低成本微⼩飞⾏器姿态估计⽅法基于⽆线传感器⽹络的飞⾏器结构健康监测系统的关键技术研究与应⽤某飞⾏器温度遥测参数异常分析对四轴飞⾏器的姿态控制器的设计与仿真⼗⼤即将实现的未来飞⾏器做⼀架⽓垫飞⾏器贴地飞⾏器再⽣源于SAAB的灵魂战车—北汽绅宝柔性与刚性机翼微型飞⾏器⽓动特性差异研究动基座飞⾏器故障弹道仿真飞⾏器三维轨迹动态显⽰系统的设计基于Matlab/Simulink的飞⾏器全数字仿真平台的设计基于测向阵列的空中飞⾏器瞬时⽆源定位完美主义飞⾏器未来飞⾏器未来飞⾏器微探飞⾏器电⼒巡检欧洲航天局透露“⾼速试验飞⾏器”计划细节⾃主学习教学⽅法在“飞⾏器⾃主导航”课程中的应⽤体会发展中的飞⾏器射频隐⾝技术“创新杯”第五届全国未来飞⾏器设计⼤赛获奖作品选登ADS—B飞⾏器航迹监视的三维可视化探讨世界上最⼩的亚轨道载⼈飞⾏器四旋翼⽆⼈飞⾏器混合控制系统研究神奇的意念遥控飞⾏器“创新杯”第五届全国未来飞⾏器设计⼤赛颁奖仪式在珠海召开天津滨海⾼新区特种飞⾏器研发基地⼆期开⼯超⾼速飞⾏器可数⼩时飞越太平洋等选择哪些飞⾏器航拍?雷震⼦与⼩型飞⾏器⼀起来做四轴飞⾏器(下)基于四杆机构对仿⽣蜻蜓扑翼飞⾏器的设计优化与仿真近空间飞⾏器故障诊断与容错控制的研究进展基于QFT的四旋翼飞⾏器飞⾏控制算法研究美国飞⾏器图形⼀起来做四轴飞⾏器(上)微型飞⾏器像昆⾍那样飞⾮常规布局的斜掠翼飞⾏器微型飞⾏器像昆⾍那样飞⾼超声速飞⾏器参数化⼏何建模⽅法与外形优化X基于单⽬视觉的室内微型飞⾏器位姿估计与环境构建“飞航杯”全国⾸届未来飞⾏器设计⼤赛揭晓明天,乘什么样的飞⾏器去旅⾏临近空间环境对临近空间飞⾏器的影响乘波者飞⾏器,⼀⼩时打击全球随⼼所欲飞⾏器⽔上飞⾏器做椭圆运动的飞⾏器近地点速度范围的浅显证明从天宫⼀号的发射看飞⾏器的空间交会对接使⽤GPS传感器的飞⾏器⾃动抛物系统设计扇翼飞⾏器模型的设计与制作Vega环境下的某飞⾏器视景仿真的实现教你调试单轴飞⾏器四旋翼微型飞⾏器设计⽇本⾼超声速飞⾏器技术发展解析基于DSP的发射控制系统在提⾼飞⾏器发射精度中的应⽤TYPE 20飞⾏器腕表碟影重重探秘国外圆盘形飞⾏器飞⾏器发展史遥控飞⾏器与摄像机——派诺特AR.Drone 2.0“天宫⼀号”飞⾏器发射的地理⾓度分析关于四轴飞⾏器的姿态动⼒学建模飞⾏器飞⾏⼯况视频监测及图像处理“航天创意杯”新概念飞⾏器创新⼤赛落下帷幕“猎户座”嬗变:从乘员探测飞⾏器到多⽤途载⼈飞船⼀款“KK”板单轴飞⾏器亚特兰蒂斯的飞⾏器飞⾏器制造⼯程专业实践教学体系完善研究通古斯之谜⼜有新说祸⾸疑是天外飞⾏器视频跟踪四旋翼飞⾏器创新实验系统明天,乘什么样的飞⾏器去旅⾏对“天宫⼀号”⽬标飞⾏器发射成功的多⾓度思考基于DE算法的再⼊飞⾏器横向机动能⼒研究基于改进粒⼦群算法的再⼊飞⾏器轨迹优化基于BP⽹络的飞⾏器解耦设计美披露外⼤⽓层杀伤飞⾏器陆基拦截试验失败原因飞⾏器机翼布局对雷达隐⾝性能影响探讨⼀种新飞⾏器的设想Evolution of Aircrafts飞⾏器发展史未来50年的概念飞⾏器直升机/喷⽓机混合飞⾏器⾸届中航⼯业杯——国际⽆⼈飞⾏器创新⼤奖赛闭幕天宫⼀号⽬标飞⾏器发射升空后准确进⼊预定轨道绿⾊飞⾏器的梦想与现实乘着⽉亮的飞⾏器中航⼯业杯—国际⽆⼈飞⾏器创新⼤奖赛9⽉在京举办晶体硅电池在太阳能飞⾏器上的选择与应⽤(下)“KK”飞控板系列飞⾏器的制作基于⾃适应逆的微型飞⾏器飞⾏控制系统美研制微型飞⾏器晶体硅电池在太阳能飞⾏器上的选择与应⽤晶体硅电池在太阳能飞⾏器上的选择与应⽤(上)探索近空飞⾏器创新永不⽌步飞⾏器专业开设基于多知识点的综合性\设计性实验的研究⼈类最早的飞⾏器《鲁班的飞⾏器》围绕旋翼飞⾏器的三维结构化运动嵌套⽹格⽣成⽅法单兵飞⾏器往事低空飞⾏器在⼤⽐例尺地形测图中的实践与应⽤全对称⽮量推进飞⾏器美军⾼超⾳速飞⾏器有两个技术路线机翼可折叠的飞翼布局飞⾏器验证机基于SolidWorks和ANSYS的⼀种四旋翼飞⾏器旋翼的设计及分析基于⽓动舵⾯和RCS融合控制的⾼超声速飞⾏器再⼊姿态容错控制基于WiFi AP模式下的多轴飞⾏器数据传输系统设计多飞⾏器⾃适应编队制导控制技术吸⽓式⾼超声速飞⾏器控制研究综述基于数字地图预处理的飞⾏器航迹规划未来飞⾏器可海空两⽤⾼超⾳速飞⾏器能穿透导弹防御基于复合材料的⼋旋翼飞⾏器设计四轴飞⾏器的研究与设计四旋翼飞⾏器飞⾏控制专利申请现状及审查应⽤实例分析美国“未来飞⾏器”基于STM32的四旋翼飞⾏器姿态测量系统设计太阳能混合动⼒飞⾏器的设计与制作基于四旋翼飞⾏器的制药车间温湿度监测基于GPS的四旋翼飞⾏器研究设计四旋翼飞⾏器悬停控制的研究派诺特Bebop Drone四轴飞⾏器专题测试灵巧的“⼤眼睛”美国空军成功发射第4架次X—37B轨道测试飞⾏器六旋翼飞⾏器平稳着陆⽅法研究⼀种⽆⼈飞⾏器测控信道初步设计“创新杯”第六届全国未来飞⾏器设计⼤赛获奖作品选登神秘的飞⾏器基于蓝⽛串⼝的多旋翼飞⾏器遥控系统设计微型飞⾏器发展现状与关键技术基于ARM的四旋翼飞⾏器设计基于四轴飞⾏器的运载机器⼈设计浅谈对飞⾏器转弯飞⾏导航控制的研究航天飞⾏器⾦属结构的制造⼯艺及检验⽅法研究多旋翼飞⾏器发展概况研究初玩四轴飞⾏器多轴飞⾏器装机经验谈普通院校飞⾏器设计与⼯程专业⼯程应⽤型⼈才培养⾃转旋翼/机翼组合构型飞⾏器飞⾏动⼒学特性旋翼飞⾏器飞⾏动⼒学系统辨识建模算法飞⾏器等离⼦体隐⾝技术及研究现状飞⾏器的翅膀美国轨道试验飞⾏器X-37B⽇内⽡国际车展飞⾏器的化妆舞会基于MATLAB的⽆⼈飞⾏器两点交会定位算法研究基于TVARMA的飞⾏器结构响应序列参数谱估计“天宫⼀号”⽬标飞⾏器的搭载⽅案评审结果揭晓中航⼯业杯—国际⽆⼈飞⾏器创新⼤奖赛9⽉在京举办美国公布⾼超声速试验飞⾏器试飞失败原因Draganfly四旋翼微型飞⾏器⾯向分级设计优化的飞⾏器参数化建模⽅法未来太空飞⾏器⼤曝光玛雅⽯板上的宇宙飞⾏器之谜X-37B“轨道试验飞⾏器1号”美国X系列飞⾏器(四)垂直极限的挑战⼀种飞⾏器综合健康管理系统决策⽀持层的设计⽅法飞⾏器⼤振幅运动实验与⽓动⼒建模飞⾏器隐⾝技术现状及其未来发展趋势个⼈飞⾏器显⾝⼿研制超微型飞⾏器成世界新趋势⽹络中⼼战的空中多⾯⼿:⽆⼈飞⾏器⼩波变换在飞⾏器遥测数据分析中的应⽤全⾃动航测测量系统MAP-Ver 在⽆⼈飞⾏器低空航摄数据处理中的应⽤飞⾏器板结构中Lamb波解析建模研究“怪物”飞⾏器上班族的飞⾏器美国X性系列飞⾏器⼀开启空间战争新时代?难以证实的古代宇宙飞⾏器之谜未来的飞⾏器数学专业:飞⾏器环境与⽣命保障⼯程考虑迟滞⾮线性的⾼超声速飞⾏器颤振分析伞翼飞⾏器折叠式飞⾏器等多⼯况下⾼超声速飞⾏器再⼊时流场的计算新型电⼒飞⾏器“帕分”等2则彩笔“飞⾏器”通⽤再⼊飞⾏器空间作战飞⾏器⽔动⼒穿戴式飞⾏器⾛近轻型运动飞⾏器“磁悬浮”:零⾼度飞⾏器飞⾏器电⽓接⼝⾃动测试系统设计关于飞⾏器振动仿真模拟的分析飞⾏器仪器舱混响室声环境实验研究和数值模拟折叠式飞⾏器·GPS定位鞋等超轻型飞⾏器的设计制作和试飞倾转双涵道风扇单⼈垂直起降飞⾏器抗震救灾的飞⾏器基于有限状态机的飞⾏器⾃毁系统时序控制设计近空间飞⾏器及其关键材料临近空间飞⾏器⾼超声速飞⾏器多约束参考轨迹快速规划算法基于CMAC⽹络的飞⾏器再⼊标准轨道制导基于INA-QFT的⾼超声速飞⾏器鲁棒控制器设计飞翼式飞⾏器结构布局与构件尺⼨的两级优化近空间飞⾏器的DSF:vsat鲁棒快速Terminal滑模控制⼗⼤杰出飞⾏器太空飞⾏器如何调控温度(下篇)UFO飞⾏器即将上市和飞⾏器相关的专业有哪些等太空飞⾏器如何调控温度(上篇)宇宙飞⾏器上带的电⼦脑袋新型飞⾏器飞⾏器的电磁⼒制动亚轨道飞⾏器返回段动⼒学虚拟样机设计⼤⽩丁博⼠的助⼒飞⾏器基于wince的飞⾏器姿态采集系统的设计与实现灵巧型军民通⽤交通⼯具——飞⾏家三栖飞⾏器基于遗传算法的飞⾏器路径规划研究临近空间和临近空间飞⾏器扑翼微型飞⾏器⾮线性H∞姿态控制飞⾏器虚拟现实仿真研究中国研制成功形似“UFO”的实⽤飞⾏器等⾼超声速飞⾏器的⽓动外形飞⾏器系统级可测试性设计⽅法研究“创新”杯第⼆届全国未来飞⾏器设计⼤赛专业⼆等奖作品(⼆)欧洲第⼀艘“⾃动转移飞⾏器”发射升空等完美世界飞⾏器再绎⾃由新梦想私享者的飞⾏器临近空间飞⾏器的种类及军事应⽤⽔上飞机、地效飞⾏器与冲翼艇辨析⾃主飞⾏器向苍蝇看齐东梦岛——奇奇的飞⾏器电⼦⼲扰对低可观测飞⾏器飞⾏路径规划的影响国内外微型飞⾏器研究现状及技术特点⼟⾖·⽜仔·总统⼭·柑橘·飞⾏器·⼤瀑布美国临近空间飞⾏器技术发展概述从“飞⾏器”谈起的“科学”飞⾏器的“摇篮”新型飞⾏器造艘飞⾏器去参赛⽇本准备进⾏升⼒体再⼊飞⾏器试验昆⾍飞⾏器飞⾏器造型⼤⽐拼飞⾏器的“原动⼒”飞⾏器在直⾓坐标系中定位⽅法研究飞⾏器助推段振动环境分析近空间飞⾏器成为各国近期研究的热点(下)近空间飞⾏器成为各国近期研究的热点(上)飞⾏器的奥秘应⽤于微型飞⾏器阵列天线的⾃适应波束形成器苍蝇飞⾏器正“瘦⾝”训练⾼超声速飞⾏器滑⾏航迹优化飞⾏器RCS计算前置处理中裁剪曲⾯剖分算法⾼超声速飞⾏器BTT⾮线性控制器设计与仿真基于MAS的空天飞⾏器⾃主控制系统设计⾼超⾳速飞⾏器头罩⽓动热流场数值模拟微型仿⽣扑翼飞⾏器的尺度效应分析美国航宇局探索体系和“机组探索飞⾏器”问答追逐飞⾏器的龟壳911TurBo不⼀样的新兵:美国研制“临近空间”飞⾏器“⼩鹰”号地效飞⾏器飞⾏器发动机的分类及⼯作原理⼀种翼⾝融合体飞⾏器外形的RCS计算与实验发明载⼈飞⾏器的应是中国⼈某RLV飞⾏器投放轨迹的设计与分析⾼空⾼速⽆⼈飞⾏器热控制系统设计碟形飞⾏器发展现状及其关键技术世爵:陆地飞⾏器⾼能激光武器的毁伤机理及飞⾏器防御途径分析美国的机组探测飞⾏器计划基于遗传算法的飞⾏器追踪拦截模糊导引律优化设计⽆⼈飞⾏器⾃主着舰实时场景的仿真实现基于OpenGL的飞⾏器超低空追击/拦截三维可视化仿真系统“地⾯飞⾏器”飞⾏器控制软件的Statechart原型及其验证跨⼤⽓层飞⾏器爬升段纵向飞⾏控制律和制导律设计地效飞⾏器的海战应⽤地效飞⾏器何以东⼭再起飞⾏器多学科设计优化软件系统防晕飞⾏器微型飞⾏器的微⼩摄像与⽆线传输系统旋翼式微型飞⾏器升⼒系统设计基于Matlab的飞⾏器系统动态特性分析飞⾏器结构特征提取与识别飞⾏器动态下俯过程中的负阻⼒现象激光推进轻型飞⾏器——⼤⽓模式和激光烧蚀推进相结合⾃⼰做个飞⾏器可重复使⽤空间飞⾏器的飞⾏控制飞⾏器RCS预估计算前置处理的曲⾯元⽅法基于视频图像的微型飞⾏器飞⾏⾼度提取⽅法各具特⾊的新动⼒飞⾏器微型飞⾏器新型极化电磁驱动舵机的研究飞⾏器结构模型的塑性动⼒响应和失效研究超⼩型固定翼飞⾏器飞控系统研究数据库中的知识发现在飞⾏器故障诊断中的应⽤登⽉飞⾏器软着陆轨道的遗传算法优化飞⾏器动⼒学虚拟样机技术研究微型飞⾏器螺旋桨的⽓动优化设计我所研究的磁悬浮环形飞⾏器基于GIS的⽆⼈飞⾏器路径规划航空百年:“601所杯”未来飞⾏器设计⼤赛启事新闻⾥的飞⾏器:RJ-100型客机“熊蜂-1T“遥控飞⾏器“熊蜂-1T”遥控飞⾏器⼩型观测系统新型飞⾏器V-44问世飞⾏器座舱联想形形⾊⾊的新飞⾏器阿列克谢耶夫与他的地效飞⾏器神奇的地效飞⾏器空间作战飞⾏器。
旋翼空中机器人技术报告
“飞鹰一号”四旋翼无人机系统设计刘文智、李海波、郭峰、朱磊、许长魁、冉晨阳、张成龙、张建国、陈云乔、吕超(哈尔滨工程大学信息与通信工程学院,黑龙江哈尔滨 150001)“Feiyingyihao”Four-rotor UA V System DesignLiu Wen-zhi Li Hai-bo Guo Feng Zhu Lei Xu Chang-kui Ran Chen-yang ZhangCheng-long Zhang Jian-guo Chen Yun-qiao(College of Information and Communication Engineering,Harbin EngineeringUniversity,Harbin,Heilongjiang 150001,China)摘要:四旋翼无人机系统由哈尔滨工程大学空中机器人队。
该无人机的设计涉及机械、电子、计算机、自动化、空气动力学等多个学科。
该无人机以Altera公司的FPGA为核心器件,定制了I2C、SPI、UART、PPM内核,完成了惯性测量组件(IMU)、GPS、磁传感器的数据采集,完成了遥控信号的处理,进行导航信息融合与控制算法解算,驱动无刷直流电机实现了四旋翼无人飞行器的起飞、悬停、降落、导航等功能。
无人机搭载摄像头等设备,配备相应的地面站软件,便可以完成摄像、侦察等功能。
关键字:无人机;自动驾驶;地面站;通信系统Abstract: The four-rotor UAV is designed by Hrbeu aero-robot team. Several subjects such as mechanics, electronics, computer science, automatics, aerodynamics were concerned when the plane was designed.Altera's FPGA is the core device of the UAV , I2C、SPI、UART、PPM kernel was customized .The data acquisition of inertial measurement unit (IMU), GPS, magnetic sensors, remote control signal processing, navigation information fusion and control algorithms solver is completed. Takeoff, hover, landing, navigation and other functions of the four-rotor UAV is achieved by driving brushless DC motor. Cameras, surveillance and other functions can be achieved when the UAV is equipped with cameras and appropriate ground station software.Key words: UAV; automatic pilot; ground station1.无人机概述及系统总体微型四旋翼无人飞行器是一种外形新颖,性能优越的垂直起降无人飞行器,具有较高的军用和民用价值。
四轴飞行器(研究性学习省一等奖)资料

制作展开了专题研究,从设计、制作,到编程、 调试,直到试飞,全方位整理和了解了四轴飞行 器的控制原理和技术。实践也证明了我们的执着 努力获取了成功,我们体验了设计、制作与试飞 的过程,也收获了成功的喜悦!
谢谢观赏
Thanks for listening
方案设计 启发
——机身设计
玻纤板设计
3D建模
方案设计
——机臂材料
ABS工程塑料
铝方管
方案设计
——起落架
方案一Βιβλιοθήκη 方案二元件加工 启发
机床加工
切割碳棒
组装机身 启发
传感器校准 启发
加速度校准
首次试飞
问题与解决
——锁定问题
内部程序 修改一览
PID参数调节
简介:PID控制是基于微 积分学为基础的数字化 自动控制方式,P代表比 例, I 代表积分, D 代表 微分。它以传感器采集 的数据作为输入源,按 预定的PID参数根据特定 的公式计算以后输出控 制。
多功能四轴飞行器
设计与制作
指导老师:余志刚
组员:张英特 丁一平 沈宇哲 刘执恒 陈宇昊 曹智一 姚威 卜尔豪
嘉兴高级中学
高二(7)班
课题背景
电网检测
物流运送
固定翼
直升机
多旋翼
研究过程
在老师的指导与帮助下,我们便动手开始实践
①原理学习
②方案设计 ③制作过程 ④首次试飞
⑤后期问题解决
原理介绍
平飞 单边加速 完成倾斜
航拍集锦 启发
前景展望
实时图传
——无限范围
前景展望
太阳能电池
——无限动力
感想 启发
通过研究性学习活动,我们体会到了团队合作的力 四轴飞行器,在我们没有自己亲自动手制作
四轴飞行器作品说明书
四轴飞行器作品说明书摘要四轴飞行器在各个领域应用广泛。
相比其他类型的飞行器,四轴飞行器硬件结构简单紧凑,而软件复杂。
本文介绍四轴飞行器的一个实现方案,软件算法,包括加速度计校正、姿态计算和姿态控制三部分。
校正加速度计采用最小二乘法。
计算姿态采用姿态插值法、需要比照这三种方法然后选出一种来应用。
控制姿态采用欧拉角控制或四元数控制。
关键词:四轴飞行器;姿态;控制目录1.引言 (1)2.飞行器的构成 (1)2.1.硬件构成 (1)2.1.1.机械构成 (1)2.1.2.电气构成 (3)2.2.软件构成 (3)2.2.1.上位机 (3)2.2.2.下位机........... . (4)3.飞行原理........... ................................ (4)3.1. 坐标系统 (4)3.2.姿态的表示 (5)3.3.动力学原理 (5)4.姿态测量........... ................................ (6)4.1.传感器校正 (6)4.1.1.加速度计和电子罗盘 (6)5.姿态控制 (6)5.1.欧拉角控制 (6)5.2.四元数控制 (7)6.姿态计算 (7)7.总结 (8)参考文献 (9)1.引言四轴飞行器最开始是由军方研发的一种新式飞行器。
随着MEMS传感器、单片机、电机和电池技术的发展和普及,四轴飞行器成为航模界的新锐力量。
到今天,四轴飞行器已经应用到各个领域,如军事打击、公安追捕、灾害搜救、农林业调查、输电线巡查、广告宣传航拍、航模玩具等。
目前应用广泛的飞行器有:固定翼飞行器和单轴的直升机。
与固定翼飞行器相比,四轴飞行器机动性好,动作灵活,可以垂直起飞降落和悬停,缺点是续航时间短得多、飞行速度不快;而与单轴直升机比,四轴飞行器的机械简单,无需尾桨抵消反力矩,成本低。
本文就小型电动四轴飞行器,介绍四轴飞行器的一种实现方案,讲解四轴飞行器的原理和用到的算法,并对几种姿态算法进行比较。
创意概念项目终评名单
41
王禹桐
临沂第一中学
临沂市
42 43
广视角汽车驾驶创意方案 高速切割水汽制造富氧水技术
李贤达 苏洪宇
临沂第一中学 临沂第一中学
临沂市 临沂市
44
一种袜子晒晾、收纳装置
沈自莹
山东省临沂第十九中学
临沂市
45
一种纯净水桶
郑铭娴
山东省临沂第十九中学
临沂市
46
校门口立体通道设想
张 蕾
冠县第一中学
聊城市
47 48
淄博市张店区实验中学
淄博市
17 18
未来地下城市 自行车新型自动变速系统
枣庄市薛城区奚仲中学 枣庄市第十五中学东校
枣庄市 枣庄市
第 1 页,共 3 页
创意概念项目终评名单
19 20 21 22 餐桌清洁器 多功能搜救机器人 室内游泳池电子救护报警系统设计 气囊顶升式淤泥沼泽快速救援装置 张淑研 王怀智 高明睿 张佳峥 燕宗煦 韩宜珊 崔译匀 苏悦洁 徐铭键 于 洋 袁心月 河口区第一中学 河口区第一中学 东营市第一中学 莱州市神堂中学 东营市 东营市 东营市 烟台市
一种雨伞 一种平板小车试验自动控制装置
郭昊昱 胡天元 张晓旭 郭志轩
山东省聊城第一中学 无棣第一中学
聊城市 滨州市
49
基于红外智能感应的汽车安防装置
郓城第一中学
菏泽市
50
“酶”的功能与核聚变之间的设想
夏修新
曹县第一中学
菏泽市
第 3 页,共 3 页
5 6
行车安全影像系统的设计 碳纳米复合膜在治理抗生素水污染中的应用
邱凡睿 陈雨轩
山东师范大学附属中学 山东省实验中学
济南市 济南市
作业设计课题开题报告
作业设计课题开题报告
一、题目
四轴飞行器在视觉跟踪航线飞行及悬停升降控制
二、开题目的技术背景
随着智能机器人开发发展,高性能自主无线控制的四轴飞行器也成为了当今研究的热门话题。
四轴飞行器能实现定点悬停、自主航线飞行,可广泛用于物流、航拍、地面监控等领域。
在视觉跟踪航线飞行及悬停升降控制这一技术领域,采用四轴飞行器作为控制平台能够得到良好的效果。
四轴飞行器在视觉跟踪航线飞行及悬停升降控制,主要是通过视觉传感器(如摄像头)对航线的位置进行实时跟踪,通过控制器控制四轴飞行器进行巡航,从而实现航线跟踪,定点悬停以及自主升降等功能。
三、设计任务
1. 研究四轴飞行器悬停升降控制原理,整理有关理论知识。
2. 设计四轴飞行器的视觉跟踪航线飞行及悬停升降控制系统,包括控制结构,控制算法等。
3. 根据四轴飞行器悬停升降控制要求,设计多项目标的多航点控制系统来实现高效的悬停升降控制。
4. 利用实际硬件和软件模拟测试,评估系统性能,主要包括航线跟踪误差,悬停精度和升降精度等。
5. 根据测试结果,对系统进行优化调整,提高系统性能。
四、预期成果
1. 整理四轴飞行器悬停升降控制原理,以及知识相关的理论知识,形成一篇详尽的理论文章。
2. 设计稳定可靠的四轴飞行器视觉跟踪航线飞行及悬停升降控制系统,具备良好的实时性能和控制性能。
3. 根据实际测试结果,对系统进行优化调整,提高系统性能。
4. 同时,形成一篇关于悬停升降控制相关的设计报告,为后续相关应用提供有价值的参考。
《四旋翼飞行机器人结构优化及自主飞行》项目申请书

编号:(试行)兰州交通大学大学生创新实验要点项目申请书项目名称:四旋翼飞翔机器人机构优化与自主飞翔实验申报人:王砚麟所在院系:机电工程学院联系电话:指导教师:赵志刚申请实验室:体制实验室申报日期:2012 年 11月 19日兰州交通大学实验室管理处制2012年 11月 26日项目名称项目简项目类型况申请资助经费项姓名目申专业年级请人前一学期综合测评名次四旋翼飞翔机器人构造优化与自主飞翔A、理论研究、社会检查研究类;B、科技产品开发、发明创建类;C、科学实验及研究;√D、其余类。
元项目起止时间性男民族汉出生年代王砚麟别机设 1001 班学院机电工程学院Z值:第 1 名;U值:第 1 名电话姓名性别民族职称出生年代研究方向个人简历赵志刚男汉副教授特种机器人时间项目名称获奖状况指2005-紧耦合飞翔机器人自主飞翔要点技国家自然科学基金结题2008术研究导教2007—轿车遮阳伞自动折叠机构研制已判定师主要科学研2009究工作简历2011-2光储联合供电系统研究开发国家 863 计划在研0162013-2缆系式紧耦合多机器人协调建模及国家自然科学基金在研016稳固性剖析2012-2链式紧耦合多机器人系统规划和控国家教育部要点项目在研014制研究姓名性专业年级所在学院项目署名出生年代分工别王砚麟男机设 101班机电工程学院构造设计、系统模块及制作项主张诚诚男机设 101班机电工程学院构造设计、系统模块及制作目要仿真剖析及数组成陶定凯男机设 1101 班机电工程学院学建模员仿真剖析及数严健男机设 1101 班机电工程学院学建模项目内容纲要(限200 字之内)利用 ANSYS 有限元剖析软件对四旋翼飞翔机器人构造进行剖析优化,使其拥有更好的稳固性、更大的承载能力及更少的能耗;再利用 ADAMS 仿真剖析软件对其运动学和动力学进行剖析,搭建硬件软件平台,研究拟订适合的控制策略,并利用MATLAB 软件对其设计一个能够使其自主飞翔的系统;同时达成该样机的制作。
一种新型四轴搜救飞行器设计
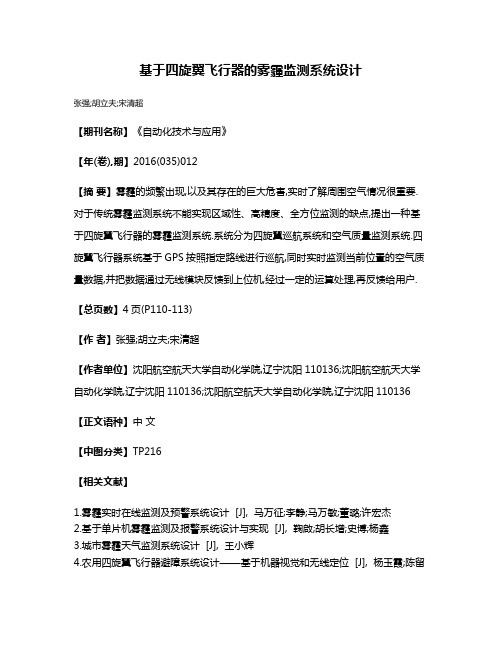
图一 四轴搜救飞行器工程应用方案
1 四轴飞行器的飞行控制原理 本四轴搜救飞行器 的动力 由四个旋翼共 同提供 。 一般情
陀螺仪、 加速度传感器 、 大气压 传感器等构成姿态检测模 块, 同时辅以无线遥 控模 块 、 线视频模 块实 现了飞行器 的无线 无
况下, 只控制各个旋 翼的旋转 速度 , 而桨 叶 的桨 矩角和旋 翼 轴均不变, 中旋 翼轴均与机 体平面垂直 。为 了使整个 机体 其
J n s hn j gn 16 0) i guZ agi ag2 0 a a 5 摘 要 : 了解决重大 自然 灾害 的灾后现场 搜救问题 , 文设计 了一种新型的 四轴搜 救飞行器 。该飞行器 主要 以 MS 4 0 为 本 P3 单 片机为控制核心 , 包括旋翼 电机、 姿态检测模块 、 无线视 频传输模块、 线遥控模块等。 中姿态检测 由陀螺仪传感器 、 无 其 加速度
飞
行 器 设 计
( 江苏科 技大学机 电与汽车 工程学院,江苏 张家港 2 5 0 ) 16 0
(co l f c aia Eet nc n uo t e n ier g J n s iesyo S i c d eh ooy Sh o o Mehncl l r i adA tmoi g e n ,i gu vri f c n e n cn lg , — co vE n i a Un t e a T
A src: osl esac n eceat jr a rl i s r an w s l fu-xsa ca ei e. h i rf i b t tT ov t erhadrsu f r o t a ds ts e t e orai i rf id s n d T ea ca a eh e ma n u a e , y r t s g r ts
基于手机通讯的四旋翼飞行器设计

分 ,位 于三 维 坐标 中 的三个 姿 态角 是不 能通 过现 有传 感装 置 直接 测 量 的 ,所 以 只能通 过 陀螺仪 、加速 度计 等测 量 出实 时角速 度 ,再 将
图1系统设计构 架
将 速度 在一 段 时 间 内进 行积 分 ,便 能得 到运 动 的角位 移 ,再将 这 个 角 位移 在三 个 维度 上分 别积 分 ,就 能得 到飞 行器 在三 维 空间 中 的航
新 闻报道 等 领域 的表 现超 然卓 绝 。
1 . 系统设计构架
达 1 MB,S R AM 高达 l 9 2 K B,同时拥 有 非常 丰 富 的可扩 展 的外 围 扩 展接 口川,可满 足 目前绝 大部 分市 场性 能要求 。
3 。 飞行姿态控制
3 . 1 飞行 姿态 的表 示 在 飞 行 器 的 控 制 过程 中 ,飞 行 器 的 姿 态 检 测 是不 可 或 缺 的部
向角 、横滚 角 和俯 仰角 。而 飞 行器 的姿 态便 可用 得 到的横 滚 角 、航
如 图1 所示 , 四旋翼 无人机 的 飞行控 制系 统简称 飞控 ,飞控 是无
人机 的核 心 ,硬件 主要 有 中央 处理器 ( MC U),气 压计 、三轴 陀螺 仪 、三轴加 速度计等传 感器 ,以及 各种输入输 出控制 电路组成 。
近 几年 人 工智 能和 计 算机 技术 飞速 发 展 ,适用 于 四旋 翼无 人机 的 芯片 也越 来越 多 , 四旋 翼飞 行器 因具 有 升降 、悬 停 、前后 、 左右 等基 本 功 能,在 外加 各 种模 块之 后在 拍 照 、资源 勘探 、森林 救 灾、
可分 为顺 时针 电机 和逆 时针 电机 ,顺时 针 电机和 逆 时针 电机 交 义分
一种新型四轴搜救飞行器设计

一种新型四轴搜救飞行器设计
张鹏;程飞;曹宇强;孙来;王琪
【期刊名称】《科技广场》
【年(卷),期】2010(000)009
【摘要】为了解决重大自然灾害的灾后现场搜救问题,本文设计了一种新型的四轴搜救飞行器.该飞行器主要以MSP430单片机为控制核心,包括旋翼电机、姿态检测模块、无线视频传输模块、无线遥控模块等,其中姿态检测由陀螺仪传感器、加速度传感器以及大气压传感器.实验结果验证了该飞行器的有效性,能实现无线遥控以及远程视频传输.
【总页数】3页(P145-147)
【作者】张鹏;程飞;曹宇强;孙来;王琪
【作者单位】江苏科技大学机电与汽车工程学院,江苏,张家港,215600;江苏科技大学机电与汽车工程学院,江苏,张家港,215600;江苏科技大学机电与汽车工程学院,江苏,张家港,215600;江苏科技大学机电与汽车工程学院,江苏,张家港,215600;江苏科技大学机电与汽车工程学院,江苏,张家港,215600
【正文语种】中文
【中图分类】TH112
【相关文献】
1.一种新型灾难救援四轴航拍飞行器设计 [J], 黄鹏宇;曾路荣;杨川;彭远行;余成波
2.一种新型的电力高压电网系统巡检四轴飞行器设计 [J], 王鑫
3.一种微型四轴飞行器设计 [J], 刘洋;杨润丰
4.一种新型的电力高压电网系统巡检四轴飞行器设计 [J], 王鑫;
5.一种辅助搜救的四旋翼飞行器设计 [J], 丁嘉俊;马一川;尹恒宇
因版权原因,仅展示原文概要,查看原文内容请购买。
基于STM32的无人机飞行器设计
基于STM32的无人机飞行器设计徐信;陈聪【期刊名称】《信息通信》【年(卷),期】2018(000)012【摘要】四旋翼无人机由于体积小、结构简单、运行灵活、成本低等优势在无人机市场占据一定地位.针对无人机的飞行控制系统进行电路设计,以STM32F103C8T6 作为核心控制板,采用MPU6050 作为姿态传感器,结合HMC5883L 磁罗盘传感器,无线数据通信使用SX1278 模块,增加无人机和手机之间的蓝牙通信功能,通过PWM 调速控制四路电机旋转,主要功能实现自动维持无人机的正常飞行姿态.%Quad-rotor UAV occupies a certain position in the UAV market because of its small size, simple structure, flexible operation, low cost and other advantages. The flight control system of UAV is designed with STM32F103C8T6 as the core control board, MPU6050 as the attitude sensor, HMC5883L magnetic compass sensor, SX1278 module for wireless data communication, Bluetooth communication between UAV and mobile phone is added, and four motors are controlled by PWM speed regulation. The main function is to maintain the normal flight attitude of UAV automatically.【总页数】3页(P128-130)【作者】徐信;陈聪【作者单位】江苏航空职业技术学院航空工程学院,江苏镇江 212134;江苏航空职业技术学院航空工程学院,江苏镇江 212134【正文语种】中文【中图分类】V279【相关文献】1.基于STM32单片机的升降式双旋翼飞行器设计 [J], 张嘉仪;胡云峰;刘诗凡;周开军2.基于STM32微型四旋翼飞行器设计与实现 [J], 张鹏;王彬;3.基于STM32的四轴飞行器设计与实现 [J], 刘宝媛; 龚赛君; 崔治4.基于STM32F103四旋翼飞行器设计 [J], 方振宇; 金凯; 潘世华; 尹湘源5.基于STM32的灭火飞行器设计 [J], 梅阳阳;吴林桦;孙少聪;张柳振;刘涛因版权原因,仅展示原文概要,查看原文内容请购买。
基于GPS定位的四旋翼飞行器设计
基于GPS定位的四旋翼飞行器设计
王鹏;冯帅;余昌乐;许童羽
【期刊名称】《农业科技与装备》
【年(卷),期】2016(0)5
【摘要】设计基于微控制器STM32F4系列和GPS定位的新型农情监测平台,以微控制器STM32F407为控制核心,用GPS模组、陀螺仪、加速度计等多种传感器测算位置和姿态信息.硬件由飞行控制器、数传模组、动力系统、机架、云台伺服系统组成.软件则采用简洁稳定的四元数加互补滤波姿态解算算法,融入PID控制算法,实现稳定飞行、GPS定位等功能.四旋翼飞行器扩展性高、适应性强,能够适应各种复杂环境,在农情信息采集中具有较高的应用价值.
【总页数】3页(P27-29)
【作者】王鹏;冯帅;余昌乐;许童羽
【作者单位】沈阳农业大学信息与电气工程学院,沈阳 100866;沈阳农业大学信息与电气工程学院,沈阳 100866;沈阳农业大学信息与电气工程学院,沈阳 100866;沈阳农业大学信息与电气工程学院,沈阳 100866
【正文语种】中文
【中图分类】TP242.6
【相关文献】
1.基于STM32微型四旋翼飞行器设计与实现 [J], 张鹏;王彬;
2.基于STM32的微型四旋翼飞行器设计 [J], 古训; 郑亚利
3.基于STM32F103四旋翼飞行器设计 [J], 方振宇; 金凯; 潘世华; 尹湘源
4.基于双目立体视觉避障的四旋翼飞行器设计 [J], 徐今强; 刘付颖; 叶伟杰; 张佳旋; 沈兆坤
5.基于光流传感器的四旋翼飞行器设计 [J], 颜瑞;何亮;邓小飞;向晓燕;陈善荣
因版权原因,仅展示原文概要,查看原文内容请购买。
基于四旋翼飞行器的雾霾监测系统设计
基于四旋翼飞行器的雾霾监测系统设计
张强;胡立夫;宋清超
【期刊名称】《自动化技术与应用》
【年(卷),期】2016(035)012
【摘要】雾霾的频繁出现,以及其存在的巨大危害,实时了解周围空气情况很重要.对于传统雾霾监测系统不能实现区域性、高精度、全方位监测的缺点,提出一种基于四旋翼飞行器的雾霾监测系统.系统分为四旋翼巡航系统和空气质量监测系统.四旋翼飞行器系统基于GPS按照指定路线进行巡航,同时实时监测当前位置的空气质量数据,并把数据通过无线模块反馈到上位机,经过一定的运算处理,再反馈给用户.【总页数】4页(P110-113)
【作者】张强;胡立夫;宋清超
【作者单位】沈阳航空航天大学自动化学院,辽宁沈阳110136;沈阳航空航天大学自动化学院,辽宁沈阳110136;沈阳航空航天大学自动化学院,辽宁沈阳110136【正文语种】中文
【中图分类】TP216
【相关文献】
1.雾霾实时在线监测及预警系统设计 [J], 马万征;李静;马万敏;董璐;许宏杰
2.基于单片机雾霾监测及报警系统设计与实现 [J], 鞠啟;胡长增;史博;杨鑫
3.城市雾霾天气监测系统设计 [J], 王小辉
4.农用四旋翼飞行器避障系统设计——基于机器视觉和无线定位 [J], 杨玉霞;陈留
亮
5.基于LabVIEW的四旋翼飞行器姿态监测系统设计 [J], 谢檬;南洋
因版权原因,仅展示原文概要,查看原文内容请购买。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
0引言我国地域广大,自然条件复杂,是世界上自然灾害最为严重的国家之一。
2008四川汶川以及2010年玉树连续发生了7级以上地震。
震后塌方和泥石流在给救灾带来困难的同时,也进一步加大了施救的难度,增加了施救者受伤的危险程度。
虽然自然灾害的发生无法阻止,但是减少灾害带来的伤害是可以实现的,比如开发一种无人驾驶的微型飞行器,对上述不可达危险领域进行探测和搜救即可减少伤害的发生。
在微型飞行器的研究方面,目前欧美等发达国家远远走在全球的前列[1-3],且成功研究了[4]固定翼式、旋翼式和扑翼式各类微型飞行器,而我国高校和研究所虽然也开始展开了相关研究,但更多停留在理论设计阶段。
为了解决重大灾后现场的搜救过程,本课题以MSP430单片机为控制核心,利用陀螺仪、加速度传感器、大气压传感器等构成姿态检测模块,同时辅以无线遥控模块、无线视频模块实现了飞行器的无线遥控和无线视频监控,为灾后现场的搜救提供了条件,图一为课题组设计的工程应用方案。
监控室的监控人员可以实现对飞行器无线的遥控,当飞行器飞行到灾后现场上空时,可以通过所携带的摄像头将图像资料无线传输给监控室,给现场决策提供帮助。
1四轴飞行器的飞行控制原理本四轴搜救飞行器的动力由四个旋翼共同提供。
一般情况下,只控制各个旋翼的旋转速度,而桨叶的桨矩角和旋翼轴均不变,其中旋翼轴均与机体平面垂直。
为了使整个机体转矩平衡,采用正反桨设计,即对角线的两组桨相同,相邻的两个桨桨叶相反,这样正常飞行时两个桨正转两个桨反转,转矩抵消,避免飞行器打转。
当然,旋转时需加大两个正浆或两个反浆来改变总的转矩,从而改变偏航角,如图二所示。
控一种新型四轴搜救飞行器设计Design of a New Style Four-axis Aircraft张鹏程飞曹宇强孙来王琪Zhang Peng Cheng Fei Cao Yuqiang Sun Lai Wang Qi (江苏科技大学机电与汽车工程学院,江苏张家港215600)(School of Mechanical-Electronic and Automotive Engineering,Jiangsu University of Science and Technology,Jiangsu Zhangjiagang 215600)摘要:为了解决重大自然灾害的灾后现场搜救问题,本文设计了一种新型的四轴搜救飞行器。
该飞行器主要以MSP430单片机为控制核心,包括旋翼电机、姿态检测模块、无线视频传输模块、无线遥控模块等,其中姿态检测由陀螺仪传感器、加速度传感器以及大气压传感器。
实验结果验证了该飞行器的有效性,能实现无线遥控以及远程视频传输。
关键词:自然灾害;四轴;搜救;飞行器中图分类号:TH112文献标识码:B文章编号:1671-4792-(2010)9-0145-03Abstract :To solve the search and rescue after major natural disasters,a new style four-axis aircraft is designed.The aircraft is mainly controlled based on MSP430,and composed of rotor-wings motor,gesture detection module,wireless video transmission mod-ule and wireless remote control module,and so on.The gesture detection module is designed through gyro sensor,accelerometer and atmospheric pressure sensor.The experimental results show the validity of the aircraft,which can realize the wireless control and re-mote video transmission.Keywords :Natural Disasters ;Four-axis ;Search and Rescue ;Aircraft ★基金项目:江苏省教育厅(苏教高〔2010〕16号【609】)的立项资助图一四轴搜救飞行器工程应用方案一种新型四轴搜救飞行器设计145科技广场2010.9制对角线上的一组桨的转速不同,使机体倾斜一个角度产生水平分力推动飞行器平移,飞行速度可以由俯仰角的大小与电机的转速来控制。
2四轴飞行器的硬件系统设计本四轴搜救飞行器的硬件系统平台主要由:旋翼电机拖动模块、姿态检测模块、无线遥控模块、无线视频传输模块等组成。
2.1旋翼电机拖动模块[5-6]为了给四轴搜救飞行器提供动力,同时考虑到系统轻重量要求,设计中选用BL2212/13无刷直流电机。
该电机工作电压为7.2~16.8VDC ,电流为1~35A ,通过改变电机电枢电压接通时间和通电周期的比值(即占空比)来改变平均电压的大小,从而控制电机的转速。
2.2姿态检测模块[7]2.2.1陀螺仪传感器为了采集飞行器三个方向的角速率,即俯仰角速率、横滚角速率、偏航角速率,设计中共采用了3个由muRata (村田)公司生产的ENC-03R 型角速度陀螺仪。
由于陀螺仪输出的是角加速度,因此在控制器中对角加速度信号进行了积分计算从而获得飞行时所偏离的角度。
2.2.2加速度传感器由于陀螺仪传感器具有温度漂移的现象,随着温度的升高其测量值将远离实际值。
所以需要使用加速度传感器测得数据对其所测得数据进行修正与补偿。
设计中主要采用freescale 公司生产的MMA7260型加速度传感器。
2.2.3大气压传感器为了控制飞行器的飞行高度,在系统设计过程中采用了气压传感器,主要是freescale (飞思卡尔)的大气压传感器,型号为MPX4115。
2.3无线遥控模块为了能实现监控中心对四轴搜救飞行器进行远距离的无线遥控,设计中采用了蓝牙传输模块,将其与Msp430-2274芯片相连,从而实现监控中心的上位PC 机与飞行器的无线远程通信。
PC 机通过蓝牙发送器将控制命令传递给飞行控制板上的蓝牙接收器,蓝牙接收器接受到命令后通过UART 通信协议将命令传送给2274芯片,再由2274单片机发出PPM 波传送到姿态控制模块,来控制飞行器的飞行姿态。
2.4无线视频传输模块当飞行器到达灾后现场上空后,为了能将现场情况及时反馈到监控中心,需要对现场进行图像采集并进行无线传输。
为此,设计中采用COMS 208型彩色无线摄像头。
由于COMS 芯片内自带压缩算法,使得所得图片数据量较小,便于数据的无线传输,数据传输采用FM 调制,频段在1.2GHz ,带宽可以达到18M 。
接收端经解调后将图像解压,解压后得到的图像制式为PAL 制式,并由图像采集卡将图像串行加到USB 的通信协议上,上位机读取COM 口数据将其显示到上位机界面上。
系统的控制原理示意图如图三所示:图二四轴飞行器的飞行原理图三控制原理示意图1463实验验证为了验证所设计的四旋翼搜救飞行器的可行性,在完成相关硬件及飞行器本体设计的基础上,课题组进行了相关的试飞实验。
图四为从所拍摄试飞视频中截取的图片。
图四(a)为飞行器的起始状态,图四(b)-(i)图显示了四旋翼搜救飞行器的起飞过程。
实验结果可以看出,本设计是可行的。
图四试飞实验结果4结束语微小型四旋翼飞行器在民用、军事等方面都有十分广阔的应用前景,其建模与非线性控制涉及多学科、多领域内容。
本文从微小型四轴飞行器的飞行原理出发,通过搭建电机拖动模块、姿态检测模块等实现了一种新型飞行器的构建,实验结果也验证了本设计的有效性。
与国内现有研究成果以及相关产品相比,本设计的特色主要在于针对灾后的搜救,同时在自主设计相关的检测和控制模块基础上,集成了远距离无线摄像头,增加了远程无线监控。
参考文献[1]JOEL M.,MATTHEW T.Development of the Black Widow Micro Air Vehicle[R].AIAA-01-0127,2001.[2]WILSON J.R.MicroSAR Meets MAV[J].Aerospace American,1999,10(2):32-35.[3]PORNSIN-SISIRAK T.N.,LEE S.W.,NASSEF H., GRASMEYER J.,etc.MEMS Wing Technology for A Bat-tery-Powered Ornithopter.Micro Electro Mechanical Systems, 2000,MEMS2000,IEEE[C].2000,1:799-804.[4]刘晓杰.基于视觉的微小型四旋翼飞行器位姿估计研究与实现[D].长春:吉林大学,2009.[5]范承志,王宇峰,林小娥等.一种位置无传感器无刷直流电动机驱动电路[J].微电机,2001(3):19-20,24.[6]曹杰,史金飞,戴敏.基于MEGA8单片机的无传感器无刷直流电动机控制系统设计[J].自动化仪表,2005,26(12):13-16.[7]刘焕晔.小型四旋翼飞行器飞行控制系统研究与设计[D].上海:上海交通大学,2009.作者简介张鹏(1988—),男,江苏科技大学机电与汽车工程学院机械电子工程专业;王琪,男,教授,研究生导师。
一种新型四轴搜救飞行器设计147。