温度控制系统修改版本(保存)
电采暖集中控制系统改过

智能小区电采暖集中温度控制系统一:系统简介本系统能够集中管理一个小区或者一座宾馆,一个学校,在中控室可以监视控制任意房间的温度情况,足不出户可以做到,修改控制,任意房间的温度设定,定时设定,可以监视,控制任意温控器的开启、关机;房间温控器可以独立使用,独立修改设定值,上传到中控室计算机;真正做到节能环保,低碳排放的要求。
本系统可以适用于采用电采暖的系统,比如:电热地缆,电热板等等。
具有如下功能:★用户登陆密码设定★室内温度设定★24小时制四段定时设定及每段对应温度设置★系统时间设定★单个房间耗电量统计及总耗电量统计★单个房间功率设定★参数修改(房间名称、刷新时间)★房间循环监控本系统增加的新功能★在参数设定操作中,用户可以设置用户名称、房间名称、房间数量、房间轮询时间;★可以在系统运行初始时,设定各个房间额定功率;★在耗电量统计操作中,用户可以查询任意房间耗电量,并能计算出所查询的所有房间的总耗电量;★在房间查看操作中,系统将以轮询时间来显示所有房间的状态,包括房间温度及设定温度;★用户可以修改系统时间,直接在触摸屏上进行时间设置,方便统一终端温控器的定时设置;本系统的优越性能★本系统省去数据采集器和交换机,这样在控制流程上简单明了,通讯过程中很大程度上避免数据传输错误,简化布线,方便电缆预埋施工;★运用组态模块监视控制终端温控器,用户在触摸屏上直接监视各个终端工作情况,并直接在触摸屏上对各个终端进行温度设定、定时设定以及参数设定等一些操作,本系统独立运行,这样省去PC机的中间作用,断电后会对数据进行保存,上电后数据不会丢失,系统会记忆掉电前的工作状态,上电后继续运行,不会重置各个终端的设定数据,避免用户再次设置终端参数;二:智能电采暖集中温度控制系统组成部件功能说明图一图一中,左为房间温控器,右为中控室中央控制计算机(真彩色触摸屏)。
系统特点:◆系统由组态软件开发,用户界面生动,操作方便简洁;◆画面转换流畅,控制按键生动明朗◆可设定设定点范围,设定温度、四段定时及四段温度◆可控制和查看房间温控器的开机/关机、加热和停止◆房间温控器通过485总线与中央控制器通讯,双方可以互相修改设定温度值、四段定时设定值及每段时间段对应温度值;中央控制器修改以上数值后,房间温控器会接受修改值并替换原有数据值,终端数据修改相应数据后,中央控制器在监控时会显示修改后的数据;但是开关机状态位、功率设定、参数设定、系统时间只有中央控制器可以设定,而终端不具备此修改能力,以便集中控制。
如何进行版本控制

如何进行版本控制版本控制是软件开发过程中的重要环节,它可以帮助开发人员管理和跟踪代码的更改,确保团队成员之间的合作高效协调。
本文将介绍如何进行版本控制,从而提高项目的质量和效率。
一、什么是版本控制在软件开发中,版本控制是一种管理源代码的方法,可以记录代码的历史更改并跟踪不同版本之间的差异。
它允许多个开发人员同时修改同一个代码库,同时保持代码的完整性和可追溯性。
二、版本控制的优势1. 历史记录: 版本控制系统可以保存代码的历史记录,包括每个版本的更改细节。
这对于追踪问题、回退到旧版本或查找特定更改非常有用。
2. 并行开发: 多个开发人员可以同时在同一个代码库上工作,版本控制系统能够合并并处理不同开发者对同一文件的修改,避免冲突。
3. 分支管理: 版本控制系统允许创建分支,开发人员可以在不同的分支上进行独立的开发工作,最后再将分支合并到主线上。
4. 团队协作: 版本控制系统可以提供同步和分享代码的功能,团队成员可以方便地协作开发,并获得及时的更新。
三、版本控制系统的种类1. 集中式版本控制系统(CVCS): 使用集中式版本控制系统,所有的代码都存储在一个中央服务器上。
开发人员通过从服务器上检出代码进行开发,再提交更改到服务器。
代表性的CVCS包括SVN和Perforce等。
2. 分布式版本控制系统(DVCS): 分布式版本控制系统将代码复制到每个开发人员的本地,每个人都拥有一份完整的代码库。
开发人员可以在本地进行开发和更改,然后将更改推送到其他人的代码库中。
代表性的DVCS包括Git和Mercurial等。
四、Git作为版本控制工具1. 安装和配置: 首先,需要在计算机上安装Git,并进行一些基本的配置,如设置用户名和邮箱。
2. 初始化仓库: 使用Git初始化一个新的仓库,或者克隆一个现有的仓库到本地。
3. 添加和提交更改: 在修改文件后,使用Git将更改添加到暂存区,然后提交更改到代码库中。
提交时,可以添加相应的注释来描述更改的目的和内容。
温度控制系统具体源程序

/******************************************************************/
/* 向CH451传输数据 */
ch451_din=1;
ch451_load=1;
ch451_dout=1;
#ifdef USE_KEY
IT1=0; //设置下降沿触发
IE1=0; //清中断标志
#include<reg52.h> //包含头文件,一般情况不需要改动,头文件包含特殊功能寄存器的定义
#include<math.h>
#include<INTRINS.H>
#define uchar unsigned char
#define uint unsigned int
#define CH451_LEFTCYC 0x0301 //设置移动方式-左循
#define CH451_RIGHTMOV 0x0302 //设置移动方式-右移
#define CH451_RIGHTCYC 0x0303 //设置移动方式-右循
//******************************************************
void Set_temp(void) //设定保温点
{ unsigned char i;
ch451_write(CH451_DIG0|showtemp[0]);//显示原来设定温度
void delay1(uchar MS);
unsigned int ReadTemperature(void);
温度自动控制系统
摘要本设计以MSP430单片机为主控核心,采用增量PID控制算法,实现木盒内温度的调节与稳定控制。
本系统主要包括两部分:温度测量部分和制冷控制部分。
温度测量部分采用美国Dallas 半导体公司生产的数字式温度传感器DS18b20, 通过总线协议实现测量。
温控部分有PWM 调节开关电源的供电电压,通过改变PWM 信号的占空比,精确地控制制冷片的供电电压,从而控制制冷速率。
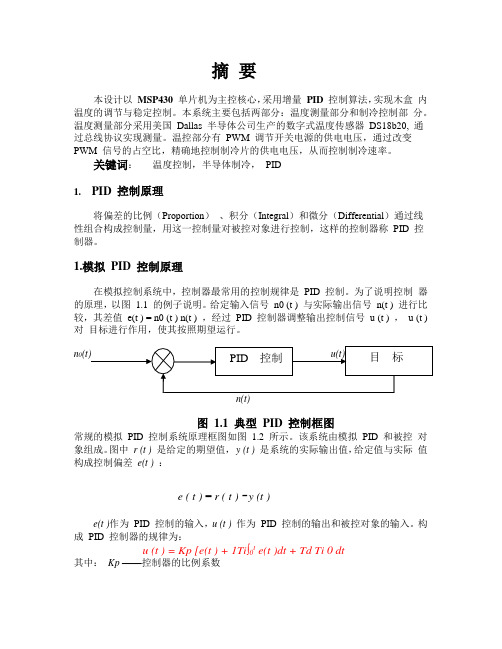
关键词:温度控制,半导体制冷,PID1. PID 控制原理将偏差的比例(Proportion)、积分(Integral)和微分(Differential)通过线性组合构成控制量,用这一控制量对被控对象进行控制,这样的控制器称PID 控制器。
1.模拟PID 控制原理在模拟控制系统中,控制器最常用的控制规律是PID 控制。
为了说明控制器的原理,以图 1.1 的例子说明。
给定输入信号n0 (t ) 与实际输出信号n(t ) 进行比较,其差值e(t ) = n0 (t ) n(t ) ,经过PID 控制器调整输出控制信号u (t ) ,u (t ) 对目标进行作用,使其按照期望运行。
n0(t)u(t)PID 控制目标n(t)图1.1 典型PID 控制框图常规的模拟PID 控制系统原理框图如图1.2 所示。
该系统由模拟PID 和被控对象组成。
图中r (t )是给定的期望值,y (t )是系统的实际输出值,给定值与实际值构成控制偏差e(t ):e ( t ) = r ( t ) -y (t )e(t )作为PID 控制的输入,u (t )作为PID 控制的输出和被控对象的输入。
构成PID 控制器的规律为:u (t ) = Kp [e(t ) + 1Ti∫0t e(t )dt + Td Ti 0 dt其中:Kp——控制器的比例系数Ti——控制器的积分时间,也称积分系数Td——控制器的未分时间,也称微分系数图 1.2 模拟PID 控制系统原理图1.1.1比例环节比例环节的数学表达式:Kp * e(t ) 在模拟PID 控制器中,比例环节的作用是对偏差瞬间作出反应。
温度控制系统(课程设计)

长安大学《单片机原理及接口技术》课程设计(简易温度控制系统)专业:电气工程及其自动化学号: 2804060132姓名:任晴利指导老师:段晨东时间: 2008.12.22~2009.01.03目录目录。
题目。
摘要。
需求分析。
方案比较。
硬件设计。
硬件电路设计。
总体电路设计。
软件设计。
调试及结果分析。
附录1 电路程序。
附录2 电路总图。
题目:简易温度控制系统一.任务设计并制作一个简易的单片机温度自动控制系统(见图一)。
控制对象为自定。
图一 恒温箱控制系统二.要求设计要求如下(1)温度设定范围为40℃~90℃,最小区分度为1℃(2)用十进制数码显示实际温度。
(3)被控对象温度采用发光二极管以光柱形式和数码形式显示。
(4)温度控制的静态误差≤2℃。
扩充功能:控制温度可以在一定范围内设定,并能实现自动调整,以保持设定的温度基本保持不变(测量温度时只要求在现场任意设置一个检测点)。
恒温箱 执行器 可编程 控制器 显示器 变送器 设置键盘 电源 220V AC 温度传感器摘要本系统以A T89S52单片机芯片为核心,组成温度测量和控制系统,采用DS18B20数字温度传感器对温度进行实时采样,并将测量结果用数码管实显示,可以运用键盘按钮对温度进行设定,并且驱动加热器或制冷器将温度调整到设定温度,其功能完善,人机界面良好,可靠性高,AbstractThe system to single-chip AT89S52 chip as the core, the composition of the control of temperature control system of the adoption of digital temperature sensor DS18B20 temperature sampling, real-time display with digital temperature control, you can use the keyboard for temperature regulation, the use of heater and cooler temperature adjustments to improve its functions, a good man-machine interface, high reliability一、需求分析根据题目的具体要求,经过阅读思考,可对题目的具体任务、功能、技术指标等作如下分析。
文件版本控制与变更管理

文件版本控制与变更管理文件版本控制与变更管理是指在文件的创建、修改和保存过程中,将文件的不同版本进行有效地管理,以确保文件的完整性和一致性。
在如今信息化时代,文件的版本不断更新,变更频繁,因此,进行文件版本控制与变更管理显得尤为重要。
本文将从版本控制的概念、重要性以及常用的版本控制工具等方面进行讨论。
一、版本控制的概念版本控制,即Version Control,是指追踪文件修改历史并允许回溯、撤销以及比较不同版本的技术。
它可以对文件的更改进行记录、管理和控制,避免文件丢失或者混乱,并提供了多人协同工作、并行开发和分支管理等功能。
二、版本控制的重要性1. 提供备份与恢复功能:版本控制工具能够自动保存文件的每个版本,使得在文件意外丢失或被破坏时能够方便地进行恢复操作。
2. 提高团队协作效率:多人同时对一个文件进行修改时,版本控制工具能够合并这些修改,避免冲突,并保留每个人的修改历史,方便查看和回溯。
3. 管理变更历史:版本控制工具保存了文件每次修改的详细记录,可以追溯文件的变更历史,包括何时进行了修改,修改了什么内容等信息,为错误定位和代码审查提供了便利。
4. 精确控制文件版本:版本控制工具允许用户对文件进行不同版本的比较,找出差异,从而确定修改的内容和相应的责任人。
三、常用的版本控制工具1. Git:Git是目前最流行的分布式版本控制系统,具有高效、快速、灵活和强大的分支管理功能,被广泛应用于开源项目和商业项目中。
2. SVN:SVN是集中式版本控制系统,通过服务器集中管理文件的版本,对于小型团队和项目比较适用,具有简单易用的特点。
3. Mercurial:Mercurial与Git类似,也是一种分布式版本控制系统,主要用于管理源代码,具有良好的可扩展性和跨平台的特点。
四、变更管理的重要性文件的变更管理是版本控制的一个重要环节,它能够确保文件的变更过程有序、规范、可控。
变更管理包括变更请求的提交、评审、审批、测试和发布等过程,它有助于组织和团队合理管理文件变更,提高工作效率和质量。
如何进行代码版本管理

如何进行代码版本管理代码版本管理是软件开发中的重要环节,它能够帮助开发团队协同工作、追踪代码变更,并提供备份和恢复功能。
本文将介绍如何进行代码版本管理,包括使用版本控制系统(Version Control System,简称VCS)以及常用的代码版本管理工作流程和最佳实践。
一、使用版本控制系统版本控制系统是进行代码版本管理的核心工具。
它可以跟踪代码的历史变更,记录每次提交的修改,并提供合并冲突、回滚以及团队合作等功能。
常见的版本控制系统包括Git、Subversion(SVN)和Mercurial等。
其中,Git是目前最流行的版本控制系统,因其强大的分布式特性和高效的操作而备受开发者青睐。
二、基本的代码版本管理工作流程1. 创建代码仓库首先,需要创建一个代码仓库(Repository),用于存储代码和版本信息。
可以选择在本地搭建仓库,也可以使用云服务提供的仓库托管平台,如GitHub、GitLab等。
2. 克隆代码仓库使用版本控制系统提供的命令或界面工具,将代码仓库中的代码克隆到本地。
这样,就可以在本地进行代码的修改和版本管理操作了。
3. 创建分支在进行代码开发时,为了避免直接修改主分支的代码,通常会创建一个新的分支(Branch),在该分支上进行开发工作。
这样可以同时保持主分支的稳定性。
4. 提交代码在完成一部分代码的开发后,使用版本控制系统提交(Commit)代码变更。
每次提交需要附上注释,清楚描述所做的修改内容,方便团队成员理解和回溯代码变更历史。
5. 合并分支当分支上的代码开发完成后,可以将其合并(Merge)到主分支或其他开发分支上。
在合并过程中,版本控制系统会自动处理代码冲突,保证合并后的代码逻辑正确。
6. 解决冲突当多个开发者在同一文件的相同位置进行了修改时,就会发生代码冲突。
解决冲突是代码版本管理中常见的任务之一,一般通过手动编辑代码、选择需要保留的修改等方式解决。
7. 团队协作版本控制系统支持多人协同开发,团队成员可以在不同的分支上进行工作,各自独立开发,通过合并将代码整合到一起。
韩荣温度控制器说明书(可编辑)

韩荣温度控制器说明书本说明书内容可能在没有事先通知的情况下进行变更有关说明书株韩荣NUX除了产品的默认保障及适合特定目的性之外不做任何保障此文件及产品上使用的其它所有品名是各有关所有者的商号服务标记商标或注册商标目录1 使用之前产品确认 3安全注意事项 42 概要型号构成 63 安装额定 7外形及面板加工尺寸 8端子图 104 画面构成及参数设定全屏构成 15显示器画面1的构成 16显示器画面2的构成 18控制设定画面构成 19警报设定画面构成 20输出设定画面构成 21温度设定画面构成 22时间设定画面构成 23通讯设定画面构成 24仪器设定画面构成 25参数一览表 265 操作与动作前面部构成 29有关POWER ONOFF 控制起始与终止温度设定 30 有关输出及控制设定 31自整定警报设定 33主要错误检测功能时间设定 35通讯设定仪器设定 SUCTION 36补水功能 37泵功能多种功能 40错误类型及原因 41附件式样 421 使用之前感谢您选购本公司 STM100 模具温度控制器说明书记载本产品的安装及使用方法本章内容如下●产品确认●安全注意事项产品确认■外观检查收到产品后先检查产品外观确认产品有无破损■确认订购产品确认收到产品与订购式样是否一致请确认包装箱及产品外壳标签的型号代码■确认包装内容确认以下内容物● STM100 显示器● STM100 主机●显示器与主机连线电缆● 2针端子座 10个● 6针端子座 4个● 3针端子座 1个■残次品处理外观上发现问题或有遗漏零件时请与销售处或本公司营业部联系安全注意事项■有关本说明书的注意事项●本说明书务必传达至终端用户放置在便于随时取放场所●请在充分阅读并理解后操作本产品●本说明书详细记载产品功能对说明书外的事项概不做保证●本产品虽然基于安全考虑而制造但若有内容欠妥遗漏等情况时请与销售处或本公司营业部联系●本说明书内容可能因产品改善或功能变更而进行修改恕不另行通知■产品的安全注意事项●考虑产品及使用系统安全请遵守安全注意事项中的指示正确使用产品●不遵守本说明书指示使用或存放或因不注意而发生的安全性及其发生的损失本公司概不负责●出于产品及使用系统安全考虑需要另外保护或安装安全回路时务必在外围安装严禁对本产品内部进行修改或添加切勿任意拆卸修理修改可引发触电火灾及误动作切勿对本机施加强烈冲击可造成产品破损及误动作■产品免责●除本公司规定的产品质量保证外不做其他任何保证且不负其他任何责任●对于本公司不可预测的缺陷及自然灾害等引起用户或第三方遭受损害及间接损害的任何情况本公司概不负责■有关产品质量保证条件●保质期为自购买日起二年按说明书正常使用状态下发生的故障予以无偿修理●保质期满后发生的故障根据本公司规定标准收费维修处理●下述情况即使保质期内发生故障也进行收费维修处理·用户过失引起故障·自然灾害引起故障·产品安装后移位引起故障·任意变更产品或损伤等引起的故障·电源不稳定等电源异常引起的故障●因故障需要售后服务时请与销售处或本公司营业部联系■安装注意事项●因有触电危险请将产品安装到面板后再通电使用●排线时切断仪器所有电源后进行●切勿用湿手操作有触电危险●接地需要的内容请参考安装提示天然气管电话线避雷针等切勿接地可能引发爆炸或火灾●仪器间连线完毕之前切勿通电可能成为故障原因●使用额定外电源时有触电及火灾危险●产品不可倾斜安装●请避开以下场所安装人在无意识中会接触到端子的场所直接暴露于机械振动或冲击的场所直接暴露于腐蚀性气体或可燃性气体的场所温度变化频繁的场所温度过高 50℃以上或过低 0℃以下场所特别是在10℃以下低温使用时需预热30分以上直接暴露于直射日光的场所电磁干扰严重的场所高湿度场所环境湿度85以上场所周围有易燃物的场所灰尘盐分等多的场所近距离有发热设备的场所近距离有干扰源仪器的场所2 概要有关STM100型号说明本章内容如下●型号构成型号构成1 型号构成表型号代码内容STM100 □□模具温度控制器显示部构成 0 无显示部 1 有显示部不支持RS485通讯 2 有显示部支持RS485通讯控制部构成0 无控制部 1 有控制部相位检测 180 380 V ac2 有控制部相位检测 380 580 V ac 相位检测电压范围有可能会有变动2 订购代码表订购代码详细内容STM100-01 无显示部有控制部相位检测 180 380 V ac STM100-02 无显示部有控制部相位检测 380 580 V ac STM100-10 有显示部无通讯无控制部STM100-20 有显示部含通讯无控制部STM100-11 有显示部无通讯有控制部相位检测 180 380 V ac STM100-12 有显示部无通讯有控制部相位检测 380 580 V ac STM100-21 有显示部含通讯有控制部相位检测 180 380 V ac STM100-22 有显示部含通讯有控制部相位检测 380 580 V ac 相位检测电压范围有可能会有变动3 安装有关安装STM100的说明本章内容如下●额定●外形及面板加工尺寸●端子图额定项目内容电源100240V ±10 5060Hz 动作环境环境温度 050℃环境湿度 2585RH 但不结露画面12864 MONO LCD 输入温度类型热电偶 K 点数最多3点精度± 03 of FS 采样周期 1s 测定范围-50 500℃控制输出控制类型加热输出包括辅助输出 or 加热冷却输出输出类型继电器触点输出继电器容量3A 250VAC 3A 30VDC 负载电阻时间分解能 01 或 10ms 中偏大一项触点输入点数最多6点电压电流检测5V 约 1mA ONOFF 电阻值1K 10 K 触点输出点数最多7点输出式样继电器A触点输出容量 3A 250VAC 3A 30VDC Relay 电阻负载通讯通讯协议 Modbus-RTU 通讯方式 RS485 最长距离1200m 最多连接数31台外形及面板加工尺寸外形尺寸单位 mm面板加工尺寸单位 mmMAIN POWER 单位 mm端子图■抗干扰对策●产生干扰的原因继电器及触点马达整流子电磁线圈电磁阀相位控制 SCR电源线无线通讯器电感负载焊接机器变频器高压点火装置●抗干扰对策输入排线与电源回路及接地回路要有一定间隔静电感应引起的干扰请使用防护线注意2点不要接地根据需要将防护线接到接地端子上电子感应引起干扰时缩短排线间距且拧紧排线■ MAIN 端子排线图端子位置及编号参考下一页① SENSOR TERMINAL1 传感器端子2 3 控制温度传感器端子5 6 回水温度传感器端子8 9 出水温度传感器端子11 12 15V 输入端子②DI TERMINAL 触点输入端子13 14 检测泵过载触点输入端子15 16 检测超EGO 触点输入端子17 18 检测压力不足触点输入端子19 20 检测压力过剩触点输入端子21 22 检测下限水位触点输入端子23 24 检测上限水位触点输入端子③ OUTPUT TERMINAL 控制用输出端子1 2 加热控制输出 MAIN RELAY 输出3 4 加热控制输出 SUB RELAY 输出5 6 冷却控制输出 RELAY 输出④ DO TERMINAL 继电器触点输出端子1 2 泵正动作触点输出端子3 4 泵逆动作触点输出端子5 6 补水触点输出端子7 8 SUCTION用触点输出端子9 10 警报触点输出端子11 12 断路器触点输出端子13 14 备用⑤ PHASE CHECK TERMINAL 相位检测端子1 R相连接端子2 S相连接端子3 T相连接端子⑥ DISPLAY CN 与显示部连接的端子连接与 STM100一并提供的连接电缆⑦ POWER TERMINAL 电源端子1 FG 端子2 3 电源端子 100240VAC■显示器端子图端子位置及号码参考下图① DI TERMINAL 触点输入端子1 2 RUNSTOP触点输入端子② COMM TERMINAL 通讯端子1 2 3 4 RS485通讯端子5 通讯信号接地端子③ MAIN CN MAIN连接端子连接与STM100同时供应的电缆④ TEST PINTEST PIN 不要连接任何线路4 画面构成及参数STM100的画面构成及参数说明本章内容如下●整体画面构成●显示器画面 1 的构成●显示器画面 2 的构成●控制设定画面构成●警报设定画面构成●输出设定画面构成●温度设定画面构成●时间设定画面构成●通讯设定画面构成●仪器设定画面构成●参数一览表整体画面构成显示器画面 1 构成■停止画面■运行画面■预约画面■发生错误画面显示器画面 2 构成■普通画面■■发生错误画面■控制设定画面构成警报设定画面构成输出设定画面构成温度设定画面构成时间设定画面构成通讯设定画面构成仪器设定画面构成参数一览表■动作画面英文中文内容范围初始值CONTROL PV 控制温度控制温度 -50 500℃- RET PV 回水温度回水温度-50 500℃- ENT PV 出水温度出水温度 -50 500℃- SV 控制目标温度控制目标温度-50 500℃-50℃HOUT 加热输出量加热端输出量0 100 0 COUT 冷却输出量冷却端输出量0 100 0■控制设定画面英文中文内容范围初始值PB 加热控制带加热端比例带 0 550℃ 20℃TI 积分时间加热端积分时间 1 3600秒240秒TD 微分时间加热端微分时间 1 3600秒60秒PBC 冷却控制带冷却端比例带0 550℃ 20℃CT 加热控制周期加热端输出周期 1 100秒15秒CTC 冷却控制周期冷却端输出周期 1 100秒15秒■警报设定画面英文中文内容范围初始值PHASE ALARM 相位检测用于相位检测使用不使用不使用DEV1 ALARM 出水温度偏差控制温度与出水温度偏差警报 0550℃ 0 不使用 0 DEV2 ALARM 回水温度偏差出水温度与回水温度偏差警报0550℃ 0 不使用 0 TURB ALARM 干扰警报温度急降警报 0550℃秒 0 不使用0 HEATER ALARM 加热器警报未到达设定温度警报03600秒 0 不使用0■输出设定画面英文中文内容范围初始值OUTPUT MODE 输出模式加热加热冷却控制选择加热加热冷却加热冷却SUB HEATING 辅助输出辅助输出的 OFF 设定温度 0550℃ 0 不使用0 COOLING TEMP 冷却温度强制冷却设定温度-50 500℃ 35℃■温度设定画面英文中文内容范围初始值HLIMIT TEMP 上限温度上限温度 -50 500℃500℃LLIMIT TEMP 下限温度下限温度-50 500℃-50℃TEMP UNIT 温度单位℃℉设定℃℉℃TEMP DEGREE 小数点01 1 设定01 1 1CTL TEMP BIAS 控制温度补正控制温度补正-550 550℃0℃RET TEMP BIAS 回水温度补正回水温度补正-550 550℃ 0℃ENT TEMP BIAS 出水温度补正出水温度补正 -550 550℃ 0℃■时间设定画面英文中文内容范围初始值CURRENT TIME 当前时间年月日星期时分 991231一天2459 - Auto STWEEK 预约星期一二三四五六天一天- Auto STTIME 预约时间时分 2459 0■通讯设定画面英文名中文名内容范围初始值PROTOCOL 通讯协议通讯协议 Modbus-RTU Modbus-RTU ADDRESS 通讯单元号通讯单元号099 1 BPS 通讯速度通讯速度 4800 9600 19200 9600 DATA LENGTH 数据长度数据长度 7 8 8 STOP BIT 停止位停止位 1 2 1 PARITY BIT 校验位校验位无奇数偶数None■仪器设定画面英文中文内容范围初始值LANGUAGE 语言选择语言选择中文英文中文REMOTE 远程控制远程控制使用不使用不使用PASSWORD 密码设定密码设定 0 9999 O RETENT DISP 回水出水温度回水出水温显示使用不使用不使用W-FILL TM T1 补水时间T1 补水时间1 0 600秒0秒W-FILL TM T2 补水时间T2 补水时间2 0 60秒 0秒VERSION 程序版本版本显示 - -5 操作与动作STM100的操作方法与功能动作说明本章内容如下●前面部构成● POWER ONOFF●控制的起始与终止●有关温度设定●控制及输出设定●自整定●警报设定●检测主要错误功能●时间设定●通讯设定●仪器设定● SUCTION功能●补水功能●泵功能●其他功能●错误类型及原因面板构成■ LCD- 各种画面显示 LCD■ KEY- ONOFF POWER 电源 ONOFF 切换键- MENU LCD 画面切换键- SET 参数保存键- SV 设定值变更键- ▢▼参数变更键- 光标移动键- RUNSTOP 控制的起始与终止切换键- AT 自整定起始与终止切换键- SUCTION SUCTION的起始与终止切换键- COOL 强制制冷起始与终止切换键-BUZZER OFF 蜂鸣器关闭键- AUTO START 预约的起始与终止键- SUCTION OFF SUCTION 过程中关闭SUCTION继电器泵的逆动作继电器依然工作-F 未使用扩充用■ LED- HEAT 加热输出 MAIN 显示 LED PUMP_R 泵逆动作显示 LED - SUB 加热输出 SUB 显示 LED WATER 补水显示 LED - COOL 冷却输出 MAIN 显示 LED ALARM 发出警报显示 LED - PUMP_D 泵的正动作显示 LEDPOWER ONOFF投入电源后按 POWER ONOFF键显示初始画面并且被启用注意请注意即使调节器被停用在电源投入状态下有触电危险控制的起始与终止控制的起始与终止方法有3种用DISPLAY 前面的 RUNSTOP键用DISPLAY 后面的 RUNSTOP 触点输入触点为 ON时开始控制 OFF则终止控制用通讯可命令控制的起始与终止注意无法启动控制时请检查以下项目调节器或系统发生问题错误详情请参考错误类型及原因温度设定■使用温度的设定可设定使用温度的上限下限所有温度设定及控制均在使用温度范围内进行在温度设定上限温度及下限温度进行设定■温度的小数点可设定温度小数点有无使用温度单位为℉时不能使用小数点在温度设定小数点进行设定■温度单位温度单位可设定为℃或℉在温度设定温度单位进行设定注意请注意变更温度单位时有关温度参数可能随之变更■温度补正可补正控制回水出水温度在温度设定控制温度补正回水温度补正出水温度补正进行设定输出及控制设定■控制输出周期设定可设定加热端的控制带积分时间微分时间冷却端只可设定控制带积分时间和微分时间与加热端相同在控制设定加热控制带冷却控制带积分时间微分时间进行设定可设定加热端及冷却端控制周期在控制设定加热控制周期冷却控制周期进行设定■控制模式设定控制模式分为加热控制与加热冷却控制在输出设定输出模式进行设定■加热控制的主输出及辅助输出切换功能加热控制分为主输出和辅助输出控制温度小于设定温度与辅助输出 SUB HEATING 设定温度差值时同时输出主输出与辅助输出短时间内迅速加热控制温度进入与辅助输出设定温度范围内时在主输出与辅助输出中仅输出一项故能节省电为延长继电器寿命主输出与辅助输出间被交替选择辅助输出设定温度在输出设定辅助输出进行■强制冷却功能按2秒以上强制冷却键停止加热动作而100输出冷却控制控制温度在冷却温度 Cooling Temp 以下时自动解除强制冷却而终止控制可利用强制冷却键停止强制冷却进行正常控制自整定■自整定概要自整定是求最适合当前目标值的PID值基于当前设定值进行2个半周期的ONOFF 动作后自动终止■自整定的起始与终止运行中按 AT键或利用通讯可启动自整定自整定中 AT LED闪烁终止后熄灭正常终止自整定后最佳PID值储存至加热端和冷却端若在自整定中按 AT键则强行终止自整定维持自整定前的PID值■自整定起始条件运行中可进行自整定SUCTION 强行冷却状态下不能进行自整定警报设定■缺相逆相警报在相位检测端子检测5060Hz 频率电源的相位检测不到相位或 R S T连线错误时发出警报停止控制缺相逆相警报无关控制状态始终工作在警报设定相位检测进行设定■出水温度偏差警报与回水温度偏差警报出水温度偏差为控制温度与出水温度差值大于警报值时发出警报回水温度偏差为出水温度与回水温度差值大于警报设定值时发出警报两项警报都只在控制动作进行时工作且发出警报时进行正常控制各在警报设定出水温度偏差回水温度偏差进行设定■干扰警报控制温度在干扰警报设定温度以上维持1秒则被认为发生干扰发出警报干扰警报只在控制动作中没有冷却输出时工作发出警报时进行正常控制一旦发出警报其警报一直维持直至按蜂鸣键在警报设定干扰警报进行设定■加热器警报加热器警报设定时间内控制温度达不到设定温度的5℃以下温度则发出警报加热器警报只在控制动作中工作即使发出警报仍进行正常控制在警报设定加热器警报进行设定检测主要错误功能■泵过载警报泵过载检测输入端子 13 14号端子上有触点输入则发出泵过载警报仪器停止工作■ EGO 超温警报EGO 超温检测输入端子 15 16号端子上有触点输入则发出EGO超温警报仪器停止动作断路器的继电器输出3秒警报器的继电器继续工作■低压警报低压检测输入端子 17 18号端子上有触点输入时发出警报仪器停止工作高压警报高压检测输入端子 19 20号端子上有触点输入时发出警报仪器停止工作■温度传感器异常控制温度输入传感器尚未连接或异常测定 Burn-out 时发出警报仪器停止工作■低水位警报低水位检测输入端子 21 22号端子上有触点输入则发出警报仪器停止工作时间设定■当前时间设定在时间设定当前时间设定当前时间■周间预约以周为单位在一定星期日期启动运行时使用预约待机中 Auto Start LED亮灯预约待机中显示其画面显示周间预约星期时间预约星期在时间设定预约星期进行设定预约时间在时间设定预约时间进行设定通讯设定■RS485通讯功能支持RS485通讯MODBUS-RTU 通讯协议利用通讯支持远程控制和参数读写D-map 地址指定方式仪器设定■使用语言选择本机支持英文和中文在仪器设定语言设定进行设定■远程温度设定可利用外部电压信号 15VDC 设定控制温度例如上限温度 300℃下限温度 100℃时1V 输入对应100℃ 5V对应 300℃注意远程控制时设定温度不能由人或利用通讯变更■密码设定本机进入菜单画面需要输入密码密码在仪器设定密码设定进行设定SUCTION 功能SUCTION是从模具中去除媒体水或油的工作运行中或冷却中不能启动 SUCTIONSUCTION被启动后 SUCTION继电器和泵逆动作继电器同时工作SUCTION中 SUCTION LED亮灯SUCTION 动作中按 SUCTION OFF键则停止 SUCTION继电器的动作但泵逆动作继电器仍继续动作SUCTION OFF键只在 SUCTION动作中有效补水功能■补水动作模式补水分为检测触点输入端子动作方法和补水时间动作方法仪器设定补水时间T1设定为0时检测输入端子设定为 0以上的其它时间则按时间动作■使用触点输入端子的补水动作补水时间 T1 0 时动作无关运行状态只要按电源键即开始检测水位若补水上限触点输入端子 23 24号端子上没有触点输入则判断为水位低而开始进行补水动作补水完毕后补水上限触点端子上有触点输入时终止补水动作补水开始后补水继电器和泵正动作继电器同时动作补水动作过程中 WATER LED亮灯■使用补水时间的补水动作补水时间 T1 ≠ 0 时动作按RUN键及开始补水动作虽然补水上限触点输入端子 23 24号端子无效但低水位检测触点输入端子 21 22号端子继续动作■补水动作和温度控制温度控制可等待至补水动作完毕后开始工作若温度控制已是开始状态仅在利用触点输入端子时进行正常的温度控制及补水动作低水位警报检测低水位输入端子 21 22号端子上有触点输入时发出警报仪器停止动作泵功能状态泵正动作泵逆动作正常温度控制O X 自整定 O X 强制冷却 O X 补水X X Suction X O 发出重大警报X X多功能■ BUZZER发出警报的同时蜂鸣器开始工作消除错误原因或按 BUZZER OFF键可关闭蜂鸣器停止蜂鸣器时警报继电器也同时被关闭BUZZER OFF键被按下后 BUZZER OFF LED亮灯即使发生错误蜂鸣器与警报继电器也不工作■ CONTRAST 调整在显示器画面中按▢或▼键显示 CONTRAST调整画面▢键为增加 CONTRAST ▼键则使其减小若要重新移动到显示画面则按 SET 或 MENU键错误类型及原因错误显示错误原因警报温度控制基板错误调节器错误发生停止校正错误发生停止ADC 错误发生停止RJC 错误发生停止EEPROM错误发生维持状态相位警报缺相或逆相检测发生停止EGO 超温检测EGO温度触点输入发生停止泵过载检测泵过载触点输入发生停止压力不足检测低压触点输入发生停止压力过剩检测高压触点输入发生停止低水位检测低水位触点输入发生停止温度窗口 ----显示传感器异常发生停止出水温度偏差控制温度与出水温度偏差发生维持状态回水温度偏差出水温度和回水温度偏差发生维持状态干扰警报控制温度急降发生维持状态加热器警报控制温度不升温发生维持状态6 附录■电源式样电源电压100240VAC 点压变动率±10 电源频率5060Hz 消耗功率最大 8W 绝缘电阻 500 V dc 20 以上耐电压测定端子–接地端子 2300 V ac 1分钟电源端子–接地端子 2300 V ac 1分钟测定端子–电源端子 2300 V ac 1分钟■温度输入式样输入点数3点输入类型 K CA 采样周期 1s 测定范围-50500℃测定精度±03 of FS ± 1digit 输入补正-100100 of FS 输入阻抗约 1M 基准触点补偿误差最大±15℃■远程控制输入式样输入点数1点输入类型 15VDC 采样周期 1s 测定精度±03 of FS ± 1digit 输入阻抗约 1M ■相位输入式样输入点数3点 RST 输入容量 180380VAC 或380V580VAC 根据型号不同检测频率 5060Hz■触点输入式样输入点数最大 6点ONOFF 阻抗110K■继电器输出式样输出点数最大10点输出式样继电器 A 触点输出容量250VAC 3A 30VDC 3A 分解能01 或 10ms 中偏大一个■通讯式样通讯方式RS485 最多连接数31台最长通讯距离12Km 通讯速度 4800 9600 12800 bps 停止位12 bit 数据长度 78 bits 校验无偶数奇数通讯协议MODBUS-RTU- 4 -注意·切断仪器的所有主电源确认电缆断电后进行排线·通电中切勿接触到端子有触电危险·必须切断主电源后进行排线相位检测R231S①传感器输入端子T13456⑦控制温度电源⑤-回水温度FG电源-③控制输出端子出水温度③加热输出①加热辅助输出-TC_K冷却输出⑥127891011泵正动作连接显示部15VDC 输入①-④继电器触点输出端子②触点输入端子泵逆动作PUMP过载补水SUCTION④绝对禁止使用②131415161718警报EGO断路器低压备用212223241920高压低水位高水位②通讯端子--SGRXTX④③②显示器画面 1 显示器画面 2 显示器画面SETSET▢▼MENU1 控制设定①加热控制带②积分时间③微分时间④冷却控制带⑤加热控制周期⑥冷却控制周期接通电源PWR菜单画面SETMENU2 警报设定①相位检测②出水温度偏差③回水温度偏差④干扰警报⑤加热器警报3 输出设定①输出模式②辅助输出③冷却温度4 温度设定①上限温度②下限温度③温度单位④小数点⑤控制温度补正⑥回水温度补正⑦出水温度补正5 时间设定①当前时间②预约星期③预约时间6 通讯设定①通讯协议②通讯单元编号③通讯速度④数据长度⑤停止位⑥校验位7 仪器设定①语言设定②远程控制③密码设定④回水出水温度⑤补水时间T1⑥补水时间T2⑦程序版本确认密码Contrast 调整画面SETSET控制温度值280℃280℃SV控制目标值0419 二 1540 当前日期当前星期当前时间280℃SV000输出 050 280℃加热端输出量冷却端输出量SV280℃280℃预约二 15 40预约星期预约时间280℃280℃SV目标错误内容※错误内容与显示参考错误类型及原因 42页控制温度值280℃280℃回水出水280℃回水温度值出水温度值280℃280℃回水错误内容※错误内容与显示参考错误类型及原因 42页微分时间[ 0015秒]冷却控制周期设定冷却控制周期[ 0015秒]加热控制周期设定加热控制周期冷却控制带设定冷却控制带[ 0020 ℃]微分时间设定[ 0060秒]积分时间。
温度控制系统

“温度控制系统”设计、调试报告1.设计目标陈述以单片机AT89C2051和数字温度传感器AD590为核心的电热恒温的设计方案,能实现精确控温,并能显示当前温度。
其各项功能的实现由单片机控制系统来完成。
其加热功率为0~50W,,电源为交流5V,调温范围+0℃~+100℃,可以根据实际需要进行调节升温速度,温度控制精度为±0.5℃。
本控制系统的主要性能指标:控温范围:室温~100℃;控制精度:<±0.5℃;控制方式:PWM控制。
2.完成情况简述软硬件完成,功能未实现3.系统总体描述及系统框图整个系统的硬件结构如图所示。
各点温度由AD590 温度传感器检测,并经屏蔽线传到多路模拟开关,经模拟开关切换后,经放大器放大,再由A/D 转换器转换成数字信号。
单片机读取转换后的数字信号进行必要的处理,将结果记录保存到内存RAM 中,同时送LCD巡回显示.4.各模块说明1.测量温度模块电阻温度单片机给定温度加热电阻—加热电阻AD转换51单片机液晶屏测量环境温度的传感器采用二端式半导体集成温度传感器AD590,AD590 是一种半导体集成温度传感器,输出电流与它所感受的温度成线性关系,供电电压可从+4V 到+30V,测温范围为-55℃~150℃。
它成本低廉,使用方便.2.显示模块显示器采用低功耗液晶显示模块T6963C,系统工作时能显示温度变化的曲线3.加热模块控制方面,为了简化输出通道的硬件结构,考虑到加热系统具有较大的热惯性,本系统采用脉冲宽度调制的控制方法。
AT89C2051的输出信号控制50欧姆发热电阻的平均加热功率。
4.单片机模块5.调试流程程序连接过程中发现编译器无法识别()方式初始化数据,于是改为=方式初始化。
6.遇到的问题及解决方法7.原理图及实物照片温度测量模块发热模块单片机模块数模转换模块8.程序流程图和源代码(附注释)初始化x坐标值为1调用AD_0809将转换结果存于ad809中将ad809中的数据乘以15得到最终转换温度赋予tem调用显示函数将温度显示在液晶屏上跟据温度做出判断数据judge加一数据judge加一根据judge值选择发热函数将time值赋予oldtime将tem值赋予old源代码:#include <reg51.h>#include <stdio.h>#include <lcd.h>#define uint unsigned int#define uchar unsigned charsbit st=p3^0;sbit oe=p3^1;sbit eoc=p3^2;sbit out=p3^3;uint ad_0809;//转换结果uint tem;//温度uint judge;//判断结果uint old;//上次温度int oldtime;//上次时间差距uint x;//显示的x坐标值uint y;//显示的y坐标值void judge();//判断函数void control();//控制发热电阻函数void ad0809();//A/D转换芯片启动程序void delay(uint x);//延时程序void display();//显示程序void main(){x=1;Line(0,0,240,0);Line(0,1,0,128);while(1){ad0809();//调用A/D转换器tem=15*ad_0809;display();//调用显示程序judge();//调用判断程序control();//调用控制程序old=tem;oldtime=time;};}void delay(uint x){uint i;for(;x>=0;x--){i=0;i=1;};}void ad0809(){oe=0;//启动ad0809st=0;st=1;st=0;delay(1);while(!eoc);//等待转换结束oe=1;//读取数据ad_0809=p1;oe=0;}/********************************** //控制发热电阻函数**********************************/void judge(){int time;//按照现在发热功率所需时间int a;//曲线斜率int b;//距离目标温度差值a=tem-old;b=70-tem;time=b/a;if(tem<70)judge=1;if(tem>=70)judge=0;}void control(){switch(judge){case 0:out=0;break;case 1;out=1;break;};}/********************************** //液晶显示函数/*********************************/ void display(){if(x>=239){lcd_clear();Line(0,0,240,0);Line(0,1,0,128);}w_dot(x,tem);}//清除屏幕void lcd_clear(void){unsigned int i;dat_write(0x00);dat_write(0x00);cmd_write(0x24); //设置指针地址0000H cmd_write(0xb0); //设置自动写状态for(i=0; i<30*1024; i++){auto_write(0x00); // data=0;}cmd_write(0xb2); // 自动写结束}//指令,数据读写状态检查void wr_check(void){unsigned char sta;do{sta=read_busy();sta=(sta & 0x03);} while(sta!=0x03);}//数据自动读状态检查void AutoRCheck(void){unsigned char sta;do{sta=read_busy();sta=(sta & 0x04);} while(sta!=0x04);}//数据自动写状态检查void AutoWCheck(void){unsigned char sta;do{sta=read_busy();sta=(sta & 0x08);} while(sta!=0x08);}//写代码void cmd_write(unsigned char cod) {wr_check();CD=1;DELAY;LCD_WR=0;DELAY;P2=cod;DELAY;LCD_WR=1;DELAY;}//写数据void dat_write(unsigned char dat) {wr_check();DELAY;LCD_WR=0;DELAY;P2=dat;DELAY;LCD_WR=1;DELAY;CD=1;DELAY;}//自动写void auto_write(unsigned char dat) {AutoWCheck();CD=0;DELAY;LCD_WR=0;DELAY;P2=dat;DELAY;LCD_WR=1;DELAY;CD=1;DELAY;}//读数据unsigned char read_dat(void){unsigned char temp;wr_check();CD=0;DELAY;P2=0xFF;LCD_RD=0;DELAY;temp=P2;DELAY;LCD_RD=1;DELAY;CD=1;DELAY;return temp;}//读忙unsigned char read_busy(void){unsigned char temp;CD=1;DELAY;P2=0xff;DELAY;LCD_RD=0;DELAY;temp=P2;DELAY;LCD_RD=1;DELAY;return temp;}//画点void w_dot(unsigned char O_X,unsigned char O_Y) {unsigned char i;unsigned int k;i=O_X%8;O_X=O_X/8;k=30*O_Y+O_X;//k=O_Y*30 + O_X/8;dat_write(k);dat_write(k>>8);cmd_write(0x24); //设置该点所在单元地址O_Y=(7-i)+0xF0+0x08;cmd_write(O_Y); /* 写入合成数据 */}//画线void Line( unsigned char x1, unsigned char y1, unsigned char x2, unsigned char y2){unsigned char xdata line[240][2];int delta_x,delta_y;int dot_num;int i;int direct_x,direct_y;//// x-axis ///////////////////////////////////if(x1<=x2){direct_x=1;}else{direct_x=-1;}delta_x=abs(x1-x2);//// y-axis ///////////////////////////////////if(y1<=y2){direct_y=1;}else{direct_y=-1;}delta_y=abs(y1-y2);///////////////////////////////////////////////////if (delta_x<=delta_y){dot_num=delta_y+1;for(i=0;i<dot_num;i++){line[i][0]=(unsignedchar)((float)x1+(float)i*(float)(direct_x)*((float)delta_x/(float)del ta_y)+0.5);line[i][1]=y1+i*(direct_y);}}else{dot_num=delta_x+1;for(i=0;i<dot_num;i++){line[i][0]=x1+i*(direct_x);line[i][1]=(unsignedchar)((float)y1+(float)i*(float)(direct_y)*((float)delta_y/(float)del ta_x)+0.5);}}for(i=0;i<dot_num;i++){w_dot(line[i][0],line[i][1]);}}。
软件开发中的版本控制技术
软件开发中的版本控制技术在软件开发中,版本控制技术是一项至关重要的技术。
版本控制技术可以让开发者轻松地追踪代码的修改和提交历史,更好地协同开发,并且提高代码的可靠性和可维护性。
本文将介绍软件开发中的版本控制技术,包括常见的版本控制工具、版本控制的基本概念、版本控制的工作流程以及版本控制中的一些最佳实践。
一、常见的版本控制工具在软件开发中,常见的版本控制工具包括Git、SVN和Mercurial等。
这些工具都有各自的优缺点,选择哪种版本控制工具,需要考虑项目的规模、团队的规模、开发方式以及其他特殊需求等。
通常来说,Git是目前最常用的版本控制工具,因为其分布式的版本控制方式可以更好地支持分布式开发。
二、版本控制的基本概念在使用版本控制工具时,我们需要了解一些基本概念。
1. 仓库(Repository)仓库是存储代码、提交历史以及其他版本控制元数据的地方。
通常情况下,一个仓库包含了项目的所有代码和提交历史。
在Git 中,仓库是分布式的,每个开发者都可以克隆整个仓库,并在自己的本地进行开发,最后将自己的修改推送到主仓库中。
2. 分支(Branch)分支是指代码开发的不同方向。
通常情况下,一个项目会有一个主分支,也称为“主线”,其他开发者会基于主分支创建自己的分支,在自己的分支上进行开发。
在Git中,分支是轻量级的,创建分支只需要修改HEAD指针的指向即可。
3. 提交(Commit)提交是指将代码的修改保存到版本控制系统中。
每次提交都会记录提交者、提交时间、修改的文件以及修改的具体内容等信息。
提交是版本控制系统的核心。
4. 合并(Merge)合并是指将两个分支合并成一个分支。
通常情况下,合并会发生在一个分支开发完成,需要将开发的成果合并到主分支上时。
三、版本控制的工作流程在使用版本控制工具时,通常遵循一些固定的工作流程。
1. 克隆仓库在开始使用版本控制工具时,通常需要将仓库克隆到本地。
2. 创建分支在进行开发时,应该基于主分支创建自己的分支,并在自己的分支上进行开发。
如何在Excel中设置自动备份为版本控制系统

如何在Excel中设置自动备份为版本控制系统Excel是一款广泛使用的电子表格软件,用于数据分析、统计和图表制作等多个领域。
对于那些经常使用Excel进行数据处理和编辑的用户而言,自动备份功能是至关重要的,能够帮助用户保护数据安全并防止意外丢失。
而将Excel设置为版本控制系统,则能够更进一步地确保数据的完整性和可追溯性。
本文将介绍如何在Excel中设置自动备份为版本控制系统,以提高工作效率和数据管理能力。
1. 打开Excel,创建一个新的工作簿。
点击顶部菜单栏中的“文件”选项,然后选择“选项”。
2. 在弹出的选项窗口中,选择“保存”选项卡。
找到“工作簿保存”部分下的“保存工作簿”选项。
3. 在“保存工作簿”选项中,勾选“创建备份”选项。
这将启用Excel的自动备份功能。
4. 您可以选择设置备份频率以及备份文件的保存路径。
点击“备份文件夹”旁边的“浏览”按钮,选择您希望保存备份文件的文件夹。
5. 在“保存的副本”部分,选择备份频率。
可以选择每次保存时备份,或者在一定时间间隔内进行备份。
6. 点击“确定”按钮应用更改。
从此时起,Excel将会在您设置的频率下自动备份工作簿。
使用以上方法设置Excel自动备份功能后,每次保存工作簿时,Excel都会生成一个备份文件。
这样,即使原始工作簿发生损坏或者数据丢失,您依然可以找到之前版本的备份文件进行恢复。
备份文件的命名方式通常为“工作簿名字(备份日期和时间).xls”。
注意事项:1. 在设置自动备份时,建议选择适当的备份频率。
太过频繁的备份可能会占用过多存储空间,而太少的备份则可能造成数据丢失的风险。
2. 定期检查备份文件的有效性和完整性,确保备份文件能够正常打开和恢复数据。
3. 备份文件的保存路径最好选择一个与原始文件不同的文件夹,以防止误删或覆盖原始文件。
总结:通过将Excel设置为自动备份为版本控制系统,我们能有效地保护数据并降低数据丢失的风险。
在工作过程中,确保经常保存并备份工作簿,可以最大限度地保留不同版本的数据以供回溯和恢复。
vcs使用手册
vcs使用手册版本控制系统(Version Control System,简称VCS)是软件开发中非常重要的工具,用于管理和跟踪代码的版本和变更。
本手册将介绍VCS的基本概念、常用命令和最佳实践,以帮助开发人员更好地使用版本控制系统。
一、基本概念1.1 仓库(Repository)仓库是VCS存储代码的地方,包括所有版本的代码和历史记录。
1.2 分支(Branch)分支是仓库中的一个独立的代码副本,用于开展不同的开发任务。
分支允许开发人员在不影响主线代码的情况下进行独立的开发工作。
1.3 提交(Commit)提交是指将代码的修改保存到版本控制系统中的操作。
每次提交都会生成一个唯一的标识符,用于跟踪代码的变更历史。
1.4 检出(Checkout)检出是指从版本控制系统中获取代码的操作。
开发人员可以在自己的工作环境中检出代码,并在本地进行修改和测试。
二、常用命令2.1 初始化仓库git initsvnadmin create2.2 克隆仓库git clone [仓库地址]svn checkout [仓库地址]2.3 添加文件git add [文件名]svn add [文件名]2.4 提交代码git commit -m "提交说明" svn commit -m "提交说明" 2.5 更新代码git pullsvn update2.6 创建分支git branch [分支名]svn copy [源路径] [目标路径] 2.7 切换分支git checkout [分支名]svn switch [分支路径]2.8 合并分支git merge [分支名]svn merge [源路径] [目标路径]2.9 查看提交历史git logsvn log2.10 撤销修改git revert [提交ID]svn revert [文件名]三、最佳实践3.1 分支管理为每个新功能或修复创建独立的分支,避免直接在主线代码上进行修改。
版本控制系统

版本控制系统版本控制系统(Version Control System)是一种用于管理软件开发过程中的版本和变更的工具。
它能够帮助开发团队协同工作,追踪和管理代码的变更,确保团队成员之间的合作无误。
本文将介绍版本控制系统的定义、功能和常见类型,并探讨它对软件开发的重要性。
一、版本控制系统的定义版本控制系统是一种记录文件变更历史的工具,它允许开发者随时查看和恢复之前的版本。
通过版本控制系统,团队成员可以协同开发,并且对代码的变更进行追踪和管理。
这样可以避免因为多人开发而导致的代码冲突和丢失。
二、版本控制系统的功能1. 版本追踪:版本控制系统能够跟踪文件的每个版本,包括文件的修改、添加和删除等操作。
开发人员可以方便地查看和比较不同版本之间的差异,以及恢复到任意历史版本。
2. 并发控制:版本控制系统支持并发开发,可以解决多人同时修改同一个文件所带来的冲突。
它会自动合并不同开发者的修改,并提供冲突解决方案,确保开发过程的协同顺利进行。
3. 分支管理:版本控制系统允许开发者创建分支,将一个项目的代码分成多个独立的分支进行开发。
这样可以在不影响主干代码的情况下进行实验性的开发和修复bug,最后再将分支合并回主干。
4. 回滚和撤销:版本控制系统提供了回滚和撤销功能,可以在发生错误或者不满意的情况下恢复到之前的版本。
这种能力可以有效减少错误对项目的影响,并且提高开发效率。
三、版本控制系统的常见类型1. 集中式版本控制系统(Centralized Version Control System,CVCS):CVCS将文件存储在中央服务器上,每个开发者在本地只保存自己的工作副本。
当需要提交或者获取最新版本时,开发者需要通过与服务器的通信进行协作。
2. 分布式版本控制系统(Distributed Version Control System,DVCS):DVCS将整个项目的完整历史记录都保存在每个开发者的本地,每个开发者都有完整的工作副本。
服务器配置管理中的版本控制和变更管理

服务器配置管理中的版本控制和变更管理在服务器配置管理中,版本控制和变更管理是至关重要的环节。
它们确保了服务器配置的可追溯性和稳定性,帮助管理人员更好地管理和维护服务器环境。
本文将详细探讨版本控制和变更管理在服务器配置管理中的作用和实施方法。
一、版本控制在服务器配置管理中的作用版本控制系统用于跟踪配置文件的改动,并确保所有的变更都被记录下来。
它提供了以下几个关键功能:1. 历史记录:版本控制系统会保存每次配置文件的改动,并生成一个版本历史记录。
这个记录可以追溯到每个修改动作,并提供了对先前版本的恢复能力。
这对于排查问题和还原服务器配置至某个特定时间点都非常有帮助。
2. 分支管理:服务器环境可能有多个分支,例如开发环境、测试环境和生产环境。
版本控制系统支持多个分支的创建和管理,确保在不同环境下配置文件的正确应用和变更。
3. 协作和团队管理:版本控制系统允许多个管理员同时对配置文件进行修改,并提供了冲突解决机制。
这对于大型团队协同工作非常重要,避免了不同人员之间对同一配置文件的覆盖和混乱。
二、版本控制的实施方法以下是几种常见的版本控制系统的实施方法:1. Git:Git是目前最受欢迎的分布式版本控制系统之一。
它是开源的,具有强大的分支管理功能和高度灵活的配置。
Git可以与各种服务器部署工具(如Ansible、Chef)结合使用,实现自动化的配置管理。
2. Subversion:Subversion是一款集中式版本控制系统,适用于小型团队和项目。
它提供了一套简单易用的命令行工具和图形化界面,方便管理人员追踪和控制配置文件的变更。
3. Mercurial:Mercurial是另一款分布式版本控制系统,它注重简洁性和易用性。
它的设计哲学是“易于学习,强大,高性能”,适用于各种规模的项目。
三、变更管理在服务器配置管理中的作用变更管理是指对服务器配置进行改动时的规范化流程和审批机制。
其作用在于降低配置变更引发故障和安全漏洞的风险,确保变更的正确性和稳定性。
使用版本控制系统管理代码的好处和技巧

使用版本控制系统管理代码的好处和技巧随着软件开发的复杂性不断增加,代码的管理变得越来越重要。
版本控制系统(Version Control System)就是一种高效的代码管理工具,它能够帮助开发团队协作、追踪代码的变化、解决冲突,并且可以回滚代码到之前的版本。
本文将介绍使用版本控制系统管理代码的好处和一些常用的技巧。
版本控制系统的好处1.并行开发:多人同时开发同一个项目时,版本控制系统可以轻松管理不同人的代码。
每个开发人员可以在本地独立地工作,然后通过版本控制系统合并各自的改动。
这样可以避免代码冲突和覆盖他人的修改,提高团队协作效率。
2.代码追踪:版本控制系统记录每次代码的变动,包括新增、修改和删除。
开发者可以查看每个修改的详细信息,比如谁、何时、为什么修改了代码。
这对于项目的追踪和审计非常有用。
3.版本回滚:由于软件开发涉及重构、错误修复和新功能开发等,有时可能需要回退到之前某个稳定的版本。
版本控制系统通过保存每个版本的代码,可以轻松地回滚到之前的版本,避免不稳定或出现问题的代码上线。
4.分支开发:版本控制系统允许创建分支,这对于并行开发不同功能模块或解决不同问题非常有用。
开发人员可以在新的分支上独立开发,而不会与主分支的代码冲突。
一旦开发完成,可以将分支合并回主分支,保持代码的整洁和可维护性。
版本控制系统的技巧1.频繁提交:为了更好地进行代码追踪和版本回滚,建议频繁地提交代码。
这样可以确保每个提交都是一个有意义的变动,而不是一次大而全的提交。
同时,更小的提交有助于解决冲突和调试问题。
2.有意义的提交信息:每次提交时,最好写一条有意义的提交信息。
这样可以方便他人了解这次提交的目的,避免遗漏或混乱。
合理命名提交信息可以提高代码的可读性和可维护性。
3.分支管理:当同时开发多个功能时,建议为每个功能创建独立的分支。
这样可以避免不同功能的代码混淆在一起,方便跟踪进度和管理任务。
4.解决冲突:当多个开发者同时修改同一文件时,可能会发生冲突。
如何利用版本控制系统管理代码
如何利用版本控制系统管理代码代码管理是软件开发中至关重要的一项工作,而版本控制系统是一种帮助开发者有效管理代码的工具。
通过版本控制系统,开发者可以追踪代码的修改历史、协作开发、解决代码冲突等。
本文将介绍如何利用版本控制系统来管理代码,提高开发效率。
一、什么是版本控制系统版本控制系统(Version Control System,简称VCS)是一种记录文件变化的方式,可以追踪和管理文件的历史修改记录。
常见的版本控制系统有Git、SVN等。
二、为什么需要版本控制系统1. 代码备份与恢复:版本控制系统可以将代码保存在不同的版本中,避免因误操作或bug导致的代码丢失,方便进行代码的回滚和恢复。
2. 代码协作开发:多人同时开发同一项目时,版本控制系统可以方便地进行代码合并和冲突解决。
3. 版本管理与发布:通过版本控制系统,可以方便地管理不同版本的代码,并准确记录每个版本的变化,以备将来的版本发布和文档更新。
三、基本概念与操作1. 代码仓库(Repository):用于存储代码的中央仓库,开发者可以将代码提交到仓库,并从仓库获取最新的代码。
2. 分支(Branch):可以独立存在的代码副本,不同分支可以同时进行开发和修改。
3. 提交(Commit):将代码修改保存到版本控制系统中,每个提交都有一个唯一的标识号,方便追踪和回滚。
4. 合并(Merge):将一个分支的代码修改合并到另一个分支中,解决不同分支之间的代码冲突。
5. 更新(Update):从代码仓库中获取最新的代码,并将本地代码更新为最新版本。
6. 回滚(Rollback):将代码退回到之前的某个版本,回退到之前稳定的状态。
四、使用Git进行代码管理Git是一款分布式版本控制系统,具有快速、灵活等优点,广泛应用于软件开发领域。
下面介绍如何使用Git进行代码管理。
1. 创建仓库:使用Git命令创建一个新的代码仓库,或者将现有的代码仓库克隆到本地。
2. 初始化仓库:在本地代码目录中初始化Git仓库,使用命令`git init`,将代码目录初始化为一个Git仓库。
温控器上下限设置方法

温控器上下限设置方法温控器是一种常见的温度控制设备,广泛应用于家用电器、工业设备等领域。
正确设置温控器的上下限对于保持设备运行稳定、延长设备寿命具有重要意义。
下面将介绍温控器上下限的设置方法,希望能对大家有所帮助。
首先,确定需要控制的温度范围。
在设置温控器的上下限之前,我们需要明确需要控制的温度范围是多少。
这个范围通常由具体的设备要求或者使用环境来决定,比如某个设备的工作温度范围为20°C-30°C,那么我们就需要将温控器的上下限设置在这个范围内。
其次,进入温控器的设置界面。
大多数温控器都配有液晶显示屏和操作按钮,通过这些按钮可以进入设置界面。
在进入设置界面之前,我们需要先了解一下具体的操作方法,通常可以在使用说明书中找到相关信息。
然后,设置上限温度。
在设置界面中,找到上限温度的设置选项,根据需要将上限温度调整到设定的数值。
有些温控器可以直接输入数字,有些则需要通过加减按钮来调整。
在设置上限温度的过程中,需要注意不要超出设备的最大承受温度,以免对设备造成损坏。
接着,设置下限温度。
同样在设置界面中找到下限温度的设置选项,将下限温度调整到设定的数值。
与设置上限温度类似,设置下限温度时也需要留意设备的最低工作温度,避免温度过低影响设备正常运行。
最后,保存设置并测试。
在完成上下限温度的设置后,需要在设置界面中找到保存设置的选项,并确认保存。
保存设置后,可以通过观察设备的运行状态来验证设置是否生效。
如果需要进一步调整,可以根据实际情况重新进入设置界面进行修改。
总之,正确设置温控器的上下限对于保持设备的稳定运行非常重要。
通过以上方法,我们可以准确地设置温控器的上下限,以满足设备的工作需求。
希望本文所介绍的方法能够帮助大家更好地使用温控器,保障设备的正常运行。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
#include<reg52.h> //包含单片机寄存器的头文件#include<intrins.h> //包含_nop()函数定义的头文件#define uchar unsigned char#define uint unsigned intsbit sound=P1^0; //定义扬声嚣引脚sbit relay=P1^7; //定义继电器引脚uchar code digit[10]={"0123456789"}; //定义字符数组显示数字uchar code Str[]={"Test by DS18B20"}; //温度显示字符说明uchar code Error[]={"Error!Check!"}; //说明没有检剥到DSl 8820uchar code Temp[]={"Temp"}; //温度显示字符说明uchar code Cent[]={"Cent"}; //温度单位uchar TL; //存暂存器的温度低位uchar TH; //储存暂存器的温度高位uchar TN; //储存温度的整数部分uchar TD; //储存温度的小数部分/*------------------------------------------------uS延时函数,含有输入参数unsigned char t,无返回值unsigned char 是定义无符号字符变量,其值的范围是0~255 这里使用晶振12M,精确延时请使用汇编,大致延时长度如下T=tx2+5 uS------------------------------------------------*/void DelayUs2x(unsigned char t){while(--t);}/*------------------------------------------------mS延时函数,含有输入参数unsigned char t,无返回值unsigned char 是定义无符号字符变量,其值的范围是0~255 这里使用晶振12M,精确延时请使用汇编------------------------------------------------*/void DelayMs(unsigned char t){while(t--){//大致延时1mSDelayUs2x(245);DelayUs2x(245);}}/*************************************************函数名称:扬声器警报函数功能:扬声器发出100Hz警报************************************************/void sounder(void){unsigned int i;for(i=0;i<200;i++){DelayUs2x(200);sound=!sound;}sound=0;//防止一直给喇叭通电造成损坏for(i=0;i<200;i++){DelayMs(1);}}/************************************************以下是对液晶模块的操作程序************************************************/sbit RS=P2^4; //寄存器选择位,将RS位定义为P2.0引脚sbit RW=P2^5; //读写选择位,将RW位定义为P2 .1引脚sbit E=P2^6; //使能信号位,将E位定义为P2 2 5I脚sbit BF=P0^7; //忙碌标志位,,将BF位定义为P0 7引脚/**************************************************函数名称:delaynms(uchar n)函数功能:延时若干毫秒入口参数:n*************************************************/void delaynms(uchar n){uchar i;for(i=0;i<n;i++)DelayMs(1);}/**************************************************函数名称:BusyTest(void)函数功能:判断液晶模块的忙碌状态返回值:result。
result= 1,忙碌;result=0,不忙***************************************************/bit BusyTest(void){bit result;RS=0; //根据规定,RS为低电平,RW为高电平时,可以读状态RW=1;E=1; //E=1,才允许读写_nop_(); //空操作,1602属于慢反应器件_nop_();_nop_();_nop_(); //空操作四个机器周期,给硬件反应时间result=BF; //将忙碌标志电平赋E=0; //将E恢复低电平return result;}/***********************************函数名称:WriteInstruction(uchar dictate)函数功能:写入地址或指令入口参数:dlctate******************************************/void WriteInstruction(uchar dictate){while(BusyTest()==1); //如果忙就等待RS=0; //根据规定,RS和R/w同时为低电平时,可以写入指令RW=0;E=0; // E置低电平,写指令时,E为高脉冲//就是让E从0到1发生正跳变,所以应先置"0"_nop_();_nop_(); //空操作两个机器周期,给硬件反应时间P0=dictate; //数据送入P0口,即写入指令或地址_nop_();_nop_();_nop_();_nop_(); //空操作四个机器周期,给硬件反应时间E=1; // E置高电平,即高脉冲_nop_();_nop_();_nop_();_nop_(); //空操作四个机器周期,给硬件反应时间E=0; //当E由高电平跳变成低电平时,液晶模块开始执行命令}/*********************************************函数名称:WriteAddress(uchar x)函数功能:指定字符显示的实际地址入口参数:x*********************************************/void WriteAddress(uchar x){WriteInstruction(x|0x80); //显示位置的确定方法规定为"80H+地址码x"}/*******************************************函数名称:WriteData(uchar y)函数功能:将数据(字符的标准ASCII码)写入液晶模块入口参数:y(为字符常量)*******************************************/void WriteData(uchar y){while(BusyTest()==1);RS=1; //Rs为高电平,Rw为低电平时,可以写入数据RW=0;E=0; //置低电平,写指令时,E为高脉冲//就是让E从0到1发生正跳变,所以应先置"0"P0=y; //将数据送入P0口,即将数据写入液晶模块_nop_(); //空操作四个机器周期,给硬件反应时间_nop_();_nop_();_nop_();E=1; //E置高电平,即高脉冲_nop_(); //空操作四个机器周期,给硬件反应时间_nop_();_nop_();_nop_();E=0;}/*****************************************函数名祢:LcdInitiate(void)函数功能:对LCD的显示模式进行初始化设置******************************************/void LcdInitiate(void){delaynms(15); //延时15ms,首次写指令时应给LCD一段较长的反应时间WriteInstruction(0x38); //显示模式设置:16 x 2显示,5×7点阵,8位数据接口delaynms(5); //延时5ms,给硬件一点反应时间WriteInstruction(0x38);delaynms(5); // 延时5ms,给硬件一点反应时间WriteInstruction(0x38); //连续三次,确保初始化成功delaynms(5); //延时5ms,给硬件一点反应时间WriteInstruction(0x0c); //显示模式设置:显示开,无光标,光标不闪烁delaynms(5); //延时5ms,给硬件一点反应时间WriteInstruction(0x06); //显示模式设置:光标右移,字符不移delaynms(5); //延时5ms,给硬件一点反应时间WriteInstruction(0x01); //清屏幕指令,将以前的显示内容清除delaynms(5); //延时5ms,给硬件一点反应时间}/****************************************以下是DS18B20的操作程序*****************************************/sbit DQ=P1^5; //定义DSl8B20引脚,数据线与P1^6相连uchar time; //设置全局变量,专门用于严格延时/***************************************函数名称:Init DS18B20(void)函数功能:将DSl8820传感器初始化,读取应答信号出口参数:flag 为0成功复位,为1初始化失败****************************************/bit Init_DS18B20(void){bit flag; //储存DSl8820是否存在的标志,flag=0,表示存在:flag=1,表示不存在DQ=1; //先将数据线拉高for(time=0;time<2;time++); //略微延时约6微秒DQ=0; //再将数据线从高拉低,要求保持480~960usfor(time=0;time<200;time++) //略微延时约600微秒; //以向DSl8820发出一持续480~960us的低电平复位脉冲DQ=1; //释放数据线(将数据线拉高)for(time=0;time<10;time++); //延时约30us(释放总线后需等待15-60us让DSl8820输出存在脉冲)flag=DQ; //单片机检测是否输出了存在脉冲(DQ:O表示存在)for(time=0;time<200;time++); //延时足够长时间,等待存在脉冲输出完毕return(flag); //返回检测成功标志,检测到0复位成功}/****************************************函数名称:ReadOnechar(void)函数功能:从DSl8820读取一个字节数据出口参数:dat******************************************/uchar ReadOneChar(void){uchar i=0;uchar dat; //储存读出的一个字节数据for(i=0;i<8;i++){DQ=1; //先将数据线拉高_nop_(); //等待一个机器周期DQ=0; //单片机从DSl8820读书据时,将数据线从高拉低即启动读时序dat>>=1;_nop_(); //等待一个机器周期DQ=1; //将数据线"人为"拉高,为单片机检测DSl8820的输出电平作准备for(time=0;time<2;time++);//延时约6us,使主机在15us内采样if(DQ==1)dat|=0x80;elsedat|=0x00; //如果读到的数据是0,则将0存入dat//将单片机检测到的电平信号DQ存入[i]for(time=0;time<8;time++); //延时3us,两个读时序之间必须有大于lus的恢复期}return(dat); //返回读出的十进制数据}/*******************************************函数名称:WriteOneChar(uchar dat)函数功能:向DS18B20写入一个字节数据入口函数:dat********************************************/void WriteOneChar(uchar dat){uchar i=0;for(i=0;i<8;i++){DQ=1; //先将数据线拉高_nop_ (); //等待一个机器周期DQ=0; //将数据线从高拉低时即启动写时序DQ=dat&0x01; //利用与运算取出要写的某位二进制数据,并将其送到数据线上等待DSl8820采样for(time=0;time<10;time++);//延时约30us,DSl8820在拉低后的15~60us期间从数据线上采样DQ=1; //释放数据线for(time=0;time<1;time++); //延时3us,两个写时序间至少需要1us的恢复期dat>>=1; //将dat中的各二进制位数据右移1位}for(time=0;time<4;time++); //稍作延时,给硬件一点反应时间}/****************************************以下是与温度有关的显示设置*****************************************//****************************************函数名称:display_error()函数功能:显示没有检测到DSl8820****************************************/void display_error(){uchar i;WriteAddress(0x00); //写显示地址,将在第1行第1列开始显示i=0; //从第一个字符开始显示while(Error[i]!='\0') //要没有写到结束标志,就继续写{WriteData(Error[i]); //将字符常量写入LCDi++; //指向下一个字符delaynms(100); //延时100ms较长时间,以看清关于显示的说明}while(1);}/*********************************函数名称:display_explain()函数功能:显示说明信息"Test by DS18B20"**********************************/void display_explain(){uchar i;WriteAddress(0x00); //写显示地址,将在第1行第1列开始显示i=0; //从第一个字符开始显示while(Str[i]!='\0') //只要没有写到结束标志,就继续写{WriteData(Str[i]); //将字符常量写入LCDi++; //指向下一个字符delaynms(100); //延时lms给硬件一点反应时闻}}/**************************************函数名称:display_symbol0函数功能:显示温度符号temp**************************************/void display_symbol(){uchar i;WriteAddress(0x40); //写显示地址,将在第2行第l列开始显示i=0; //从第一个字符开始显示while(Temp[i]!='\0') //只要没有写到结束标志,就继续写{WriteData(Temp[i]); //将字符常量写入LCDi++; //指向下一个字符delaynms(50); //延时1ms给硬件一点反应时间}}/***********************************函数名称:display_dot0函数功能:显示温度的小数点***********************************/void display_dot(){WriteAddress(0x49); //写显示地址,将在第2行第10列开始显示WriteData('.'); //将小数点的字符常量写入LCDdelaynms(50); //延时lms给硬件一点反应时间}/***********************************函数名称:display_cent(void)函数功能:显示温度的单位(Cent)***********************************/void display_cent(void){uchar i;WriteAddress(0x4c);i=0;while(Cent[i]!='\0'){WriteData(Cent[i]);i++;delaynms(50);}}/****************************************函数名称:display_temp1(uchar x)函数功能:显示温度的整数部分入口参数:x*****************************************/void display_temp1(uchar x){uchar j,k,l; //j,k,l分别储存温度的百位,十位和个位j=x/100; //取百位k=(x%100)/10; //取十位l=x%10; //取个位WriteAddress(0x46); //写显示地址,将在第2行第7列开始显示WriteData(digit[j]); //将百位数字的字符常量写入LCD WriteData(digit[k]); //将十位数字的字符常量写入LCD WriteData(digit[l]); //将个位数字的字符常量写入LCD delaynms(50); //延时1ITIs给硬件一占反府时间}/*************************************函数名称:display_temp2(uchar x)函数功能:显示温度的小数数部分入口参数:x************************************/void display_temp2(uchar x){WriteAddress(0x4a); //写显示地址,将在第2行第1 1列开始显示WriteData(digit[x]); //将小数部分的第一位数字字符常量写入LCD delaynms(50); //延时lms给硬件一点反应时间}/***************************************函数名称:ReadyReadTemp()函数功能:读温度准备****************************************/void ReadyReadTemp(){Init_DS18B20();WriteOneChar(0xCC); //跳过读序号列号的操作WriteOneChar(0x44); //启动温度转换for(time=0;time<100;time++); //温度转换需要一点时间Init_DS18B20(); //将DSl8820初始化WriteOneChar(0xcc); //跳过读序号列号的操作WriteOneChar(0xBE); //读取温度寄存器,前两个分别是温度的低位和高位}/**************************************函数名称:pretest()函数功能:读温度前的复位操作**************************************/void pretest(){if(Init_DS18B20()==1) //返回值为1复位失败display_error(); //显示错误display_explain(); //第一行显示"Test by Dsl8820"display_symbol(); //显示温度说明第二行显示"temp:"display_dot(); //显示温度的小数点display_cent(); //显示温度的单位}/***************************************函数名称:tempdisplay()函数功能:读温度并显示****************************************/void tempdisplay(){ReadyReadTemp(); //读温度准备TL=ReadOneChar(); //先读的是温度值低位TH=ReadOneChar(); //接着读的是温度值高位TN=TH*16+TL/16; //实际温度值=(TH。