震荡闭锁
电力系统继电保护原理-距离保护的振荡闭锁

M侧:
Zm
U
M
IM
EM IM
IM
ZM
EM
IM
ZM
1
Z e
j
ZM
∵
1- e jδ
= 1-
2 jctgδ
2
∴
Z
=
m
Z∑ (12
jctgδ2
)
-
ZM
=
(
Z∑ 2
- ZM)-
j
Z∑ 2
ctgδ2
7
Z
=
m
Z∑ (12
jctgδ2
)
-ZMΒιβλιοθήκη =(Z∑ 2
- ZM)-
j
Z∑ 2
ctgδ2
jX O’
Zm
N
Z∑ 2
17
3.5.4 振荡过程中再故障的判断
振荡过程中又发生不对称短路,判据:
I2 I0 m I1
振荡过程中又发生三相短路,判据:
U cos:近似为电弧电压,其值一般不会超过6%额
定电压,且与故障距离无关,基本不随时间 变化,振荡时,短时满足;短路时,一直满 足。
0.03p.u. U cos 0.08p.u.
响,但Ⅱ、 Ⅲ段定值较大,振荡时的测量阻抗比较
容易进入其动作区。
10
系统振荡时,阻抗继电器是 否误动、误动的时间长短与:
•
保护安装位置
•
保护动作范围
•
动作特性的形状
•
振荡周期长短等有关
11
4. 振荡与短路的区别:
①从电流和各点电压的幅值的变化上看:
振荡:作周期性变化 短路: di du 大
dt dt
3.5 距离保护的振荡闭锁
继电保护47振荡闭锁闭锁

s
2
180 时,阻抗变化率最小,即
dZ m dt
m in
Z 1 4
s
4.7 距离保护振荡闭锁
因
s
2
Tswi
,据统计,振荡周
期最大值为3s,于是
s
m in
2
3
测量阻抗变化率为
≥ dZ m dt
Z 1
6
只要适当选择保护 开放条件,可保证 保护不误动。
arg Z1
4.7 距离保护振荡闭锁
设两侧电源不相等,设 EM Ke EN e j
保护安装处电压、电流表示为:
UM K e EN e j Iswi Z M1
设电势相等,则
Iswi
EN Z 1
(Kee
j
1)
相角差为:
ctg
arctg
图中 ___
OZ E cos
2
___
PQ 2E sin
2
___
PZ E sin
2
、令
m Z M1 / Z1
则 ___ ___
m PM/ PQ
,所以
___
PM
2mE sin
2
___ ____
MZ PZ PM ( 1 2m )E sin
2
于是
UM
(E cos )2 [(1 2m)E sin ]2
2
2
E 1 4m(1 m) sin 2
2
4.7 距离保护振荡闭锁
0 有UM E ,M母线电压最高。
继电保护-3.5-3.8距离保护的振荡闭锁
振荡中心位于本线路保护范
围内时:
jX
当在δ在δ1和δ2之间时,测量 阻抗落入动作范围内,其测
O
量元件会动作
2
N
N
振荡中心位于本线路范围外 时:
测量阻抗不会落入距离I段的 动作区,距离I段不受振荡的 影响,但由于距离II段和距 离III段整定阻抗较大,可能 会动作。
M
M
1 2
Z
ZM
1 ZM
R
b. 系统振荡对不同特性的阻抗继电器的影响
因此一般取0.1s~0.3s。
数字式保护中,一般取0.15s左右。
整组复归元件
整组复归元件在故障或振荡消失后再经过一个延时 动作,将SW复原,它与故障判断元件、SW配合, 保证在整个一次故障过程中,保护只开放一次。但 是对于先外部故障引起的振荡后再次故障,保护也 将被闭锁,尚需要有再故障判别元件。
常用的故障判别元件:
ii. 反映电流突变量的故障判断元件 依据:
在系统正常或振荡时电流变化比较缓慢,而在系 统故障时电流会出现突变。
(2)利用阻抗变化率的不同来构成振荡闭锁
原理: 在电力系统发生故障时,测量阻抗由负荷阻抗突变 为短路阻抗;而在振荡时,测量阻抗缓慢变为保护 安装处到振荡中心的线路阻抗,根据两种情况下阻 抗变化速度的不同构成振荡闭锁。
为了能对电力系统振荡的物理过程进行明确而简单的分析, 同时又不影响结论的正确性,提出下列几点假设:
(1)将所研究系统按其电气连接的特点简化为一个具有双侧电源的 网络;
(2)系统振荡时,三相处于对称状态,因此可以只取一相进行分析;
(3)系统振荡时,两侧系统的电势幅值相等,相角差以δ表示;
(4)系统中各元件的阻抗角相等;
振荡闭锁
1短时开放元件,
试验条件:满足短时开放条件,(不满足不对称故障开放元件和对称故障开放元件)
状态1:常态,(三相电压57.74v,角度0 -120 120电流不加量)
状态2突变量启动状态。
(电压,A =57.74v 0︒ B =57.74v -120︒C=57.74v 120︒电流A=2A 0︒B=2A-120︒ C=2A 120︒)
状态3:故障状态满足故障状态并且满足I2<0.625I1,因为当I2>0.625I1不对称故障开放保护。
(电压,A =5V 0︒ B =5V-120︒C=57V 120︒电流A=2A 30︒ B=2A150︒ C=5A 100︒)
2.不对称故障开放元件:
试验条件:
状态1:常态,(三相电压57.74v,角度0 -120 120电流不加量)
状态2:故障状态满足故障状态并且满足I2<0.625I1,因为当I2>0.625I1不对称故障开放保护。
(满足距离动作条件)
3。
对称故障开放元件;
试验条件:在震荡菜单做,选择振荡中发生故障,故障类型,两相短路,或三相短路。
短路阻抗根据定值大小而定,负序补偿系数为0振荡后0.15发生故障。
(注意电流的大小)
振荡过程中故障开放元件:1短时开放元件,2.不对称故障开放元件3。
对称故障开放元件;举例:距离二段动作时间1S,当保护启动开始计时,到1S保护如果不动作,启动收回。
第五节 距离保护的振荡闭锁
− A相 地 接
− B相 地 接
有 零 序 分 量 无
ɺ ɺ ɺ ɺ m∆I AB ≤ ∆ICA ∩m∆I AB ≤ ∆IBC ɺ ɺ ɺ K(1,1) ∆I AB 、∆IBC 、∆ICA
− C相 地 接
最 者 故 相 大 为 障
− AB −B C − CA
ɺ ɺ ɺ ɺ m∆IC < ∆I A ∩m∆IC < ∆IB
第六节 故障类型判别及故障选相
ɺ EM
M1 ɺ I
2N
ɺ EN
ɺ U
判断故障距离 单相重合闸
(故障类型,故障相) 找出故障环路 故障类型,故障相)
电流突变量的概念: 电流突变量的概念:
ɺ ɺ ɺ ɺ ɺ[ ɺ ɺ ∆I AB = (I A − IB ) −(I [0] − IB0] ) = ∆I A − ∆IB A ɺ ɺ ɺ ɺ[ ɺ[ ɺ ɺ ∆IBC = (IB − IC ) − (IB0] − IC0] ) = ∆IB − ∆IC ɺ ɺ ɺ ɺ ɺ ɺ ɺ ∆I = (I − I ) − (I [0] − I [0] ) = ∆I − ∆I
二、振荡对距离保护测量元件的影响 1.振荡时电压电流的变化规律 1.振荡时电压电流的变化规律
ɺ EM
M1 ɺ I
2N
ɺ EN
三相系统-→单相系统
对称
ɺ U
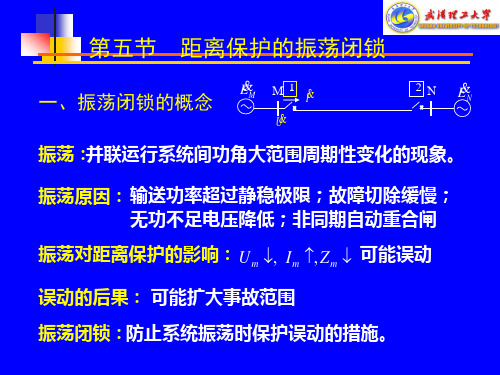
振荡原因:(1)输电线输送功率过大,超过静稳极限;
ɺ ɺ ɺ EM − EN EM (1− e− jδ ) ɺ I= = ZΣ ZΣ
ɺ ɺ ɺ UM = EM − I ZM
3.振荡对距离保护的影响 3.振荡对距离保护的影响
ɺ EM
M1 ɺ I
2N
ɺ EN
振荡闭锁过流定值作用
振荡闭锁过流定值作用嘿,朋友们!今天咱们来聊聊振荡闭锁过流定值这个超有趣(好吧,也许只有我们电力爱好者觉得有趣)的东西。
你可以把电力系统想象成一个超级大的游乐园,电流就像是在游乐园里跑来跑去的小朋友们。
正常的时候呢,这些小朋友都乖乖地按照规定路线玩耍,可有时候啊,就像小朋友们突然调皮起来一样,电力系统会发生振荡。
这时候电流小朋友们就开始横冲直撞,完全不按套路出牌了。
这时候振荡闭锁过流定值就闪亮登场啦,它就像是游乐园里的小保镖。
这个小保镖可厉害着呢,它有自己的一套判断标准,就像小保镖心里有个小本本,写着什么情况下是正常的热闹,什么情况下是危险的混乱。
振荡闭锁过流定值的定值就像是小保镖的底线。
如果电流小朋友们只是稍微兴奋一点,在这个底线之内活动,小保镖就觉得没啥大事,摆摆手让它们继续玩。
可要是电流一下子变得超级疯狂,越过了这个定值底线,就像是小朋友们开始拆游乐园设施了,那小保镖可就不能坐视不管了。
它会迅速地把一些可能受到影响的设备保护起来,就像小保镖把那些珍贵的游乐设施用围栏围起来一样。
要是没有这个小保镖,那些设备可就惨啦,就好比没有保镖保护的游乐园,珍贵的游乐设施被调皮的小朋友们破坏得一塌糊涂。
而且这个振荡闭锁过流定值还特别聪明呢。
它不会轻易地被一些小波动骗到,就像小保镖很有经验,不会因为小朋友们偶尔的小打小闹就大惊小怪。
它能准确地判断出是真正的危险还是只是一点小状况。
它就像一个严格但又很公正的裁判。
在电力系统这个大操场上,电流的运动员们跑来跑去,一旦有违反规则(超过定值)的情况,它就会吹响哨子(启动保护)。
你看,虽然它只是一个小小的定值,但在电力系统里的作用可一点都不小。
就像一颗小小的螺丝钉,对于一台大机器来说是至关重要的。
要是没有它,电力系统这个大游乐园可能就会陷入混乱,设备损坏不说,还会影响我们这些电力用户呢,就像游乐园关门了,我们这些游客就没得玩啦。
所以啊,下次再听到振荡闭锁过流定值这个名字,可别觉得它枯燥无味哦,它可是电力世界里超级酷的小保镖呢!。
振荡闭锁的基本要求
振荡闭锁的基本要求1. 引言振荡闭锁是一种常见的控制系统技术,用于在特定条件下将系统稳定在一个预定的状态。
它被广泛应用于各种工业领域,如电力系统、通信系统和自动化控制等。
本文将详细介绍振荡闭锁的基本要求及其实现方法。
2. 振荡闭锁的定义振荡闭锁是指在控制系统中,当系统输出发生振荡时,通过采取措施将系统稳定在某一状态,并防止进一步的振荡。
它能够提高系统的稳定性和可靠性,保证系统运行正常。
3. 振荡闭锁的基本要求3.1 稳态性振荡闭锁必须能够将系统稳定在一个预定的状态。
在输出发生振荡时,通过调整输入或采取其他措施,使得输出逐渐趋于稳定,并最终达到预期值。
3.2 响应速度振荡闭锁需要具备快速响应的能力。
当系统出现振荡时,它应该能够迅速检测到并采取相应的措施,以防止振荡进一步扩大。
3.3 稳定性振荡闭锁必须确保系统在闭锁状态下能够保持稳定。
它应该能够抵抗外部扰动,并能够自动调整输入以维持系统的稳定运行。
3.4 可靠性振荡闭锁需要具备高可靠性。
它应该能够在各种条件下正常工作,并能够自动进行故障检测和修复,以保证系统的可用性。
4. 振荡闭锁的实现方法4.1 PID控制器PID控制器是一种常用的振荡闭锁实现方法。
它通过不断调整输入信号,使得系统输出逐渐趋于稳定。
PID控制器根据当前输出与预期值之间的差异来计算调整量,并通过调节比例、积分和微分参数来实现闭环控制。
4.2 模糊控制器模糊控制器是另一种常见的振荡闭锁实现方法。
它利用模糊逻辑推理来处理非线性和模糊信息,从而实现对系统的稳定控制。
模糊控制器通过定义模糊规则和模糊集合来进行控制决策,并根据当前输入和输出的模糊度来调整系统参数。
4.3 自适应控制器自适应控制器是一种能够根据系统的变化自动调整控制策略的振荡闭锁方法。
它利用系统辨识和参数估计技术,实时地对系统进行建模,并根据建模结果调整控制算法和参数,以保持系统稳定。
5. 振荡闭锁的应用案例5.1 电力系统在电力系统中,振荡闭锁被广泛应用于频率、电压和功率等方面的控制。
振荡闭锁的原理
振荡闭锁的原理振荡闭锁是一种常用于电子电路中的控制电路,用于控制某种信号的频率。
振荡闭锁的原理是基于正反馈的电路,通过构建一个满足特定条件的闭环反馈系统,使得信号在一定条件下持续振荡。
振荡闭锁的常见应用包括频率稳定振荡器、时钟电路、计数器等。
在这些电路中,振荡闭锁被使用来产生一种稳定的周期性信号,并且能够精确控制信号的频率。
振荡闭锁电路的基础是正反馈回路。
正反馈是指信号经过放大后再经过一个反馈回路,反馈回路的输出又重新进入放大器中,与输入信号叠加后放大并经过再次反馈,这样就可以不断放大信号,使信号持续振荡下去。
在振荡闭锁电路中,一般采用滤波器、放大器和反馈网络组成,其中滤波器用于选择特定频率的信号,放大器用于放大信号,并且保证放大器的非线性特性,反馈网络用于构建闭环系统,以使得放大器的输出信号与输入信号具有特定的相位差。
具体来说,振荡闭锁电路的工作原理如下:1. 振荡闭锁电路中的放大器通过非线性特性产生谐波振荡闭锁电路中的放大器经过选择性的放大和滤波,使得输出信号中包含有所需的特定频率的谐波成分。
这些谐波成分经过反馈网络,再次进入放大器中进行放大,从而输出更加强大的信号。
2. 反馈网络产生特定的相位差反馈网络的作用是调整放大器输入信号与输出信号之间的相位差,使得输出信号的相位差满足一定的条件。
当输入信号与输出信号的相位差等于特定条件下的相位差时,系统将实现持续振荡。
3. 滤波器选择特定频率的信号滤波器的作用是筛选放大器输出信号中的特定频率的成分,这样可以保证输出信号的频率稳定,从而实现振荡闭锁。
振荡闭锁的原理在于通过非线性放大器和反馈网络的相互作用,使得输出信号成为一个稳定的、特定频率的振荡信号。
这种振荡闭锁电路可以应用于各种需要产生稳定频率信号的电子电路中。
通过调整放大器的放大程度和反馈网络的相位差,可以实现对信号频率的精确控制。
总结来说,振荡闭锁的原理是通过正反馈的电路构建一个闭环系统,使得信号在一定条件下持续振荡。
距离保护第4讲:振荡闭锁
3.8.3 距离保护振荡闭锁措施
(二)措施1:故障启动时保护的短时开放
利用短路故障电气量突变的特点,实现振荡闭锁。 具体实现方案: ➢ 启动元件动作,距离保护短时开放保护150ms ➢ 对于距离Ⅱ段若在上述开放时间内动作,则保持其动
作状态
3.8.3 距离保护振荡闭锁措施
(二)措施1:故障启动时保护的短时开放
启动判据:
3.8.3 距离保护振荡闭锁措施
(三)措施2:利用测量阻抗变化率(大圆套小圆式)
短路故障时, 测量阻抗因负荷阻抗突变为短路阻抗而 发生瞬间变化
系统振荡时, 测量阻抗 则按振荡过程较为缓慢地变化 为保护安装处到振荡中心点的线路阻抗
3.8.3 距离保护振荡闭锁措施
(四)措施3:利用动作延时
➢ 距离保护的延时大于测量阻抗穿越动作区的时间(一般 为1.0~1.5s), 就可避免系统振荡引起的误动作;
➢ 适用于距离Ⅲ段; ➢ 因为不退出III段,为振荡中线路再故障保留了一个简单
可靠的后备距离Ⅲ 段。 ➢ 与距离Ⅰ 、 Ⅱ 段的振荡闭锁措施相结合, 可构成距离
保护振荡闭锁的完整方案
3.8.4 振荡过程中再故障的判断
1. 电力系统振荡
振荡表现形式: 1)衰减振荡,机组间功角变化幅度逐渐减小,最后振荡 平息 2)系统失去同步,机组间功角在0-360度之间作周期性 变化
两者的不同表现在振荡时功角的变化范围和变化周期 不同。
两者的共同点在于功角均近似作周期性变化
3.8.1振荡闭锁的概念
2. 电力系统振荡对保护的影响 电力系统振荡会引起系统各个点的电流、电压、测量阻
3.8.3 距离保护振荡闭锁措施
(一)对振荡闭锁元件的基本要求
1. 系统发生全相或非全相振荡时,保护装置不应误动 作,即单纯振荡要可靠闭锁保护
震荡闭锁
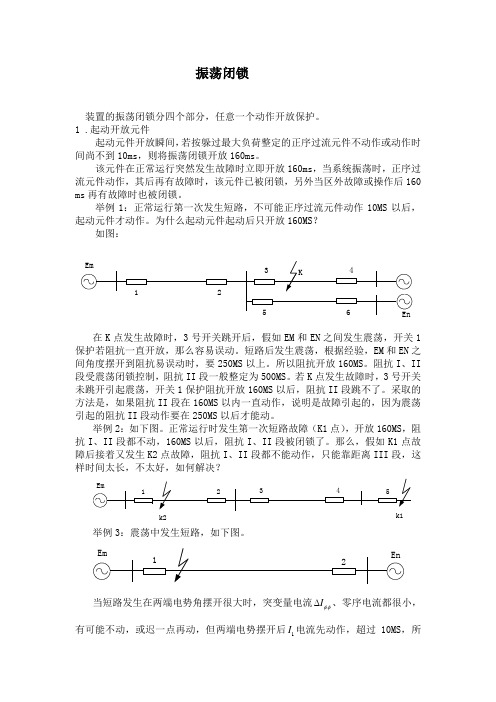
振荡闭锁装置的振荡闭锁分四个部分,任意一个动作开放保护。
1 .起动开放元件起动元件开放瞬间,若按躲过最大负荷整定的正序过流元件不动作或动作时间尚不到10ms,则将振荡闭锁开放160ms。
该元件在正常运行突然发生故障时立即开放160ms,当系统振荡时,正序过流元件动作,其后再有故障时,该元件已被闭锁,另外当区外故障或操作后160 ms再有故障时也被闭锁。
举例1:正常运行第一次发生短路,不可能正序过流元件动作10MS以后,起动元件才动作。
为什么起动元件起动后只开放160MS?如图:在K点发生故障时,3号开关跳开后,假如EM和EN之间发生震荡,开关1保护若阻抗一直开放,那么容易误动。
短路后发生震荡,根据经验,EM和EN之间角度摆开到阻抗易误动时,要250MS以上。
所以阻抗开放160MS。
阻抗I、II 段受震荡闭锁控制,阻抗II段一般整定为500MS。
若K点发生故障时,3号开关未跳开引起震荡,开关1保护阻抗开放160MS以后,阻抗II段跳不了。
采取的方法是,如果阻抗II段在160MS以内一直动作,说明是故障引起的,因为震荡引起的阻抗II段动作要在250MS以后才能动。
举例2:如下图。
正常运行时发生第一次短路故障(K1点),开放160MS,阻抗I、II段都不动,160MS以后,阻抗I、II段被闭锁了。
那么,假如K1点故障后接着又发生K2点故障,阻抗I、II段都不能动作,只能靠距离III段,这样时间太长,不太好,如何解决?k2举例3:震荡中发生短路,如下图。
I∆、零序电流都很小,当短路发生在两端电势角摆开很大时,突变量电流φφI电流先动作,超过10MS,所有可能不动,或迟一点再动,但两端电势摆开后1以第一个开放元件不满足,阻抗不能开放。
例2和例3所述情况靠以下元件开放。
2. 不对称故障开放元件不对称故障时,振荡闭锁回路还可由对称分量元件开放,该元件的动作判据为: 120I m I I ⨯>+以上判据成立的依据是:● 系统振荡或振荡又区外故障时不开放系统振荡时,0I 、2I 接近于零,上式不开放是容易实现的。
振荡闭锁的原理
振荡闭锁的原理振荡闭锁是仪器仪表控制领域常常用到的一个概念,其工作原理是通过一个反馈回路将信号进行循环放大,从而产生振荡。
这种技术广泛应用于电子设备中的时基电路、电子钟、频率计等领域。
接下来将介绍振荡闭锁的工作原理,包括分步骤的详细解释。
1. 振荡器电路:振荡闭锁的核心是一个振荡器电路。
其主要目的是生成一个基准信号,这个信号的频率和稳定性对于整个系统的工作都至关重要。
振荡器电路的实现方法种类繁多,常见的有晶体振荡器、RC振荡器等。
2. 放大器电路:在振荡器电路输出的信号经过滤波后,需要进一步放大才能驱动外部的负载。
放大器电路的设计需要考虑信噪比、增益、线性度等因素。
一般而言,放大器电路的设计采用运放、BJT管或场效应管等元件实现。
3. 反馈电路:反馈电路是振荡闭锁的关键组成部分。
其主要作用是将输出信号再次反馈到振荡器电路中,使得振荡器电路在满足共振条件和稳态条件下,产生连续的振荡信号。
同时,反馈电路还起到锁定振荡频率和稳定振荡信号的作用。
4. 滤波器电路:滤波器电路在振荡闭锁电路中的作用主要是去除输出电路中的高频杂波和其他噪声。
因为干扰源的影响可能导致输出信号频率的偏移和振荡信号的失真。
在实际应用中,可以根据需要设计低通、高通、带通滤波器等。
5. 样品保持电路:样品保持电路的作用是获得要被测量的信号。
在振荡闭锁信号应用中,样品保持电路可以获得被测量信号的幅值、相位和频率等信息。
6. 控制电路:控制电路是对振荡器电路进行频率和相位的调节,同时也是对整个振荡闭锁的控制中心。
其主要任务是调整反馈电路中增益和相移等参数来改变振荡频率和相位。
综上所述,振荡闭锁电路具有可靠且稳定的频率输出,可以被广泛应用于许多领域。
在设计和使用振荡闭锁电路时,需要考虑到各电路部分之间的关系和参数之间的相互影响,从而对振荡闭锁电路进行精确的设计和控制。
大学课件 电力系统继电保护 第三章第五节 距离保护的振荡闭锁
整组复归元件----在故障或振荡消失后再经过一个延时动 作,将SW复原,它与故障判断元件、SW配合,保证在整 个一次故障过程中,保护只开放一次。但是对于先振荡后 故障,保护也将被闭锁,尚需要有再故障判别元件。
• 3.5.4 振荡过程中再故障的判断
对于利用负序、零序分量或电流突然变化短时开放保护的 振荡闭锁措施,如果系统在振荡过程中又发生内部故障, 保护的Ⅰ、Ⅱ段也将不能动作,故障将无法被快速切除。 因此,振荡闭锁元件中还可以增设振荡过程中再故障判别 逻辑,判出振荡过程中又发生内部短路时,将保护再次开 放。
δ在180°度 附近
δ为其它 角度
该电压值很小,可 能会满足式(3-133)
该电压值比较高, 不会满足式(3-133)
式(3-133)仅在较短的时间内满足
用式(3-133)配合一个延时时间就能够区分出三相故 障和振荡。
的:
(1)M
1 2
即保护安装在送电端且振荡中心位于保护的正方向时,振
荡时测量阻抗末端轨迹的直线OO’在第一象限内与Z∑相交
,根据保护的动作特性,测量阻抗可能穿越动作区。
(2)M
1 2
即保护安装处M正好就是振荡中心,,振荡时测量阻抗末
端轨迹的直线OO’在坐标原点处与Z∑ 相交, 肯定穿越动
作区。
(3)M
KZ1----整定值 较高的阻抗元件 KZ2----整定值 较低的阻抗元件
在Z1动作后开 放△t的时间
这段时 Z2动作 间内
Z2不动作
开放保护直到Z2返回 保护不会被开放
继电保护振荡闭锁
1、电气量变化特点;
2、测量阻抗的特性分析; 3、短路故障和振荡的区分; 4、振荡过程中对称短路故障的识别; 5、振荡闭锁。
教学要求:
通过学习要求掌握系统 振荡时电气量变化的特点; 测量阻抗变化特性;短路与 振荡的区分原理。
1、系统振荡时电气量变化特点
定义:并列运行的系统或发电厂失去同步 的现象称为振荡。 特点:电力系统振荡时两侧等效电动势的 夹角 在 0 ~ 360 作周期性变化。 原因:切除短路故障时间过长、误操作、发 电厂失磁或故障跳闸、断开某一线路或设备 等造成系统振荡。 产生的影响:电力系统振荡时,将引起电压、 电流大幅度变化,对用户产生严重影响。 要求:在振荡过程中不允许保护发生误动作。
因
2 s Tswi
,据统计,振荡周
期最大值为3s,于是 2 s min 3 测量阻抗变化率为 dZ m Z 1 ≥ dt 6
只要适当选 择保护开放 条件,可保 证保护不误 动。
3、短路与振荡的区分
要求:短路时应开放保护;振荡时可靠 闭锁保护;振荡过程中发生短路,保护 能正确动作;振荡平息后自动复归。 (1)利用电气量变化速度不同区分 短路故障和振荡
P
EM
M
UM
I swi
Z
UN
N
Q
EN
当 180
I swi . max
2E Z 1
最大。
Z点位于 0.5Z 1 处。
U Z 称为系统振荡中心
特点:正常 运行时负荷 电流幅值保 持不变,振 荡电流幅值 作周期变化。
δ
K
Z M1
(3 I km)
Zk
微机保护振荡闭锁算法
第二十章微机保护振荡闭锁算法综述20.1 微机保护概述电力系统的稳定运行为社会带来了巨大的效益。
继电保护则是电力系统中十分重要、不可或缺的部分。
它起到断开故障、确保电力系统安全稳定运行的重要任务。
伴随着电网的飞速发展,更大容量的机组、超高压变电的投运,对继电保护提出了更新、更高的要求。
而计算机技术的快速发展与应用,使继电保护也随之发展,新颖的思路和技术也都可以成为现实,像自适应、小波变换等等技术也都逐渐在实践中展现出独特优点,继电保护在90年代就已经进入到微机继电保护的时代。
新型的微机继电保护技术与以往传统的继电保护相比有着许多优点,这些优点主要体现在以下几个方面:(1)可以改善和提高继电保护的性能和动作特性。
在微机保护中,我们可以用数学方程的数字方法来构成保护的测量元件,这使继电保护元件的动作特性有很大的改善和提高;微机继电保护有很强的记忆功能,利用这一特点能更好的实现故障分量保护;可以引用很多新的理论和技术,如自适应、模糊控制等等。
(2)可以很方便的补充其他辅助功能。
如故障录波、波形分析;还可以随时掌握有关保护的数据,能够打印故障前后的波形、故障报告,打印保护在运行中保护定值;利用线路故障记录数据进行测距;通过计算机网络、通信系统实现厂站监控交换信息。
(3)工艺结构条件十分优越。
和传统的继电保护相比,微机保护的硬件十分通用,制造的标准也容易统一。
另外,微机保护的装置体积小,盘位数量也就会减小,功耗更低。
(4)可靠性容易提高。
数字元件特性不易受温度变化、电源波动、使用年限影响,不易受更换元件影响;自检能力强。
(5)使用起来更加方便。
维护和调试都很方便,能大幅度缩短检修的时间;在现场即可通过软件改变特性、结构(6)保护的内部动作过程不像模拟式保护那样直观。
微机保护有它独特的优点,它在各方面都比传统的继电保护更加先进,使用方便、可靠性高,这都使微机保护很快被继电保护工作者接受和重视。
更多的技术也一直在研究开发,相信在不久的将来,微机保护一定会取代传统的继电保护,成为继电保护的主流。
SEL继电器振荡闭锁原理
SEL继电器振荡闭锁原理自动化运营事业部张贵民摘要:为了阻止距离保护误动,SEL311C、SEL311L和SEL321系列继电器设置了振荡与失步逻辑,可区分振荡与故障。
本文阐述了怎样应用振荡闭锁、解除闭锁和失步跳闸方案,提出了详细的振荡闭锁整定方法。
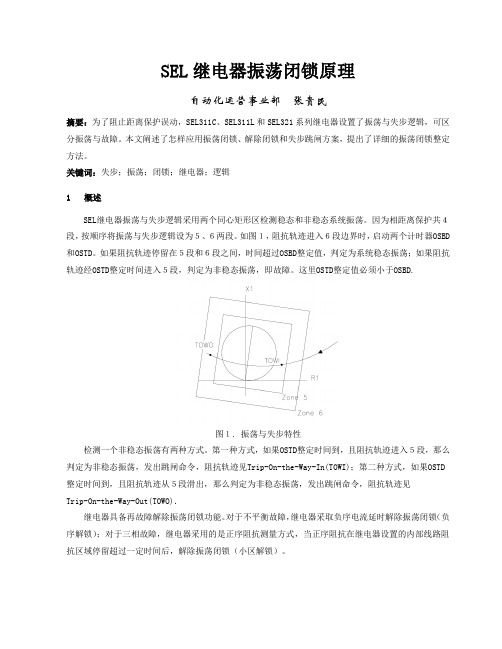
关键词:失步;振荡;闭锁;继电器;逻辑1概述SEL继电器振荡与失步逻辑采用两个同心矩形区检测稳态和非稳态系统振荡。
因为相距离保护共4段,按顺序将振荡与失步逻辑设为5、6两段。
如图1,阻抗轨迹进入6段边界时,启动两个计时器OSBD 和OSTD。
如果阻抗轨迹停留在5段和6段之间,时间超过OSBD整定值,判定为系统稳态振荡;如果阻抗轨迹经OSTD整定时间进入5段,判定为非稳态振荡,即故障。
这里OSTD整定值必须小于OSBD.图1. 振荡与失步特性检测一个非稳态振荡有两种方式。
第一种方式,如果OSTD整定时间到,且阻抗轨迹进入5段,那么判定为非稳态振荡,发出跳闸命令,阻抗轨迹见Trip-On-the-Way-In(TOWI);第二种方式,如果OSTD 整定时间到,且阻抗轨迹从5段滑出,那么判定为非稳态振荡,发出跳闸命令,阻抗轨迹见Trip-On-the-Way-Out(TOWO).继电器具备再故障解除振荡闭锁功能。
对于不平衡故障,继电器采取负序电流延时解除振荡闭锁(负序解锁);对于三相故障,继电器采用的是正序阻抗测量方式,当正序阻抗在继电器设置的内部线路阻抗区域停留超过一定时间后,解除振荡闭锁(小区解锁)。
2振荡闭锁逻辑当正序阻抗Z1进入相距离动作特性时,在稳态振荡期间,相距离保护被闭锁。
在实际应用中,系统稳态振荡不用闭锁全部距离保护,只闭锁可能动作的距离保护段。
1段为速断无延时,2段延时通常小于系统振荡周期,所以振荡逻辑闭锁正向距离1段和2段。
如果稳态振荡周期是1.5秒,那么应闭锁速断1段和通讯辅助2段。
3段和4段一般延时较长,大于稳态振荡周期,不用闭锁。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
振荡闭锁
装置的振荡闭锁分四个部分,任意一个动作开放保护。
1 .起动开放元件
起动元件开放瞬间,若按躲过最大负荷整定的正序过流元件不动作或动作时间尚不到10ms,则将振荡闭锁开放160ms。
该元件在正常运行突然发生故障时立即开放160ms,当系统振荡时,正序过流元件动作,其后再有故障时,该元件已被闭锁,另外当区外故障或操作后160 ms再有故障时也被闭锁。
举例1:正常运行第一次发生短路,不可能正序过流元件动作10MS以后,起动元件才动作。
为什么起动元件起动后只开放160MS?
如图:
在K点发生故障时,3号开关跳开后,假如EM和EN之间发生震荡,开关1保护若阻抗一直开放,那么容易误动。
短路后发生震荡,根据经验,EM和EN之间角度摆开到阻抗易误动时,要250MS以上。
所以阻抗开放160MS。
阻抗I、II 段受震荡闭锁控制,阻抗II段一般整定为500MS。
若K点发生故障时,3号开关未跳开引起震荡,开关1保护阻抗开放160MS以后,阻抗II段跳不了。
采取的方法是,如果阻抗II段在160MS以内一直动作,说明是故障引起的,因为震荡引起的阻抗II段动作要在250MS以后才能动。
举例2:如下图。
正常运行时发生第一次短路故障(K1点),开放160MS,阻抗I、II段都不动,160MS以后,阻抗I、II段被闭锁了。
那么,假如K1点故障后接着又发生K2点故障,阻抗I、II段都不能动作,只能靠距离III段,这样时间太长,不太好,如何解决?
k2
举例3:震荡中发生短路,如下图。
I∆、零序电流都很小,当短路发生在两端电势角摆开很大时,突变量电流
φφ
I电流先动作,超过10MS,所有可能不动,或迟一点再动,但两端电势摆开后
1
以第一个开放元件不满足,阻抗不能开放。
例2和例3所述情况靠以下元件开放。
2. 不对称故障开放元件
不对称故障时,振荡闭锁回路还可由对称分量元件开放,该元件的动作判据为: 120I m I I ⨯>+
以上判据成立的依据是:
● 系统振荡或振荡又区外故障时不开放
系统振荡时,0I 、2I 接近于零,上式不开放是容易实现的。
振荡同时区外故障时,相间和接地阻抗继电器都会动作,这时上式也不应开放,这种情况考虑的前题是系统振荡中心位于装置的保护范围内。
对短线路,必须在系统角180°时继电器才可能动作,这时线路附近电压很低,短路时的故障分量很小,因此,容易取m值以满足上式不开放。
对长线路,区外故障时,故障点故障前电压较高,有较大的故障分量,因此,上式的不利条件是长线路在电源附近故障时,不过这时线路上零序、负序电流分配系数较低,短路电流小于振荡电流,因此,仍很容易以最不利的系统方式验算m的取值。
本装置中m的取值是根据最不利的系统条件下,振荡又区外故障时振荡闭锁不开放为条件验算,并留有相当裕度的。
● 区内不对称故障时振闭开放
当系统正常发生区内不对称相间或接地故障时,将有较大的零序或负序分量,这时上式成立,振荡闭锁开放。
当系统振荡伴随区内故障时,如果短路时刻发生在系统电势角未摆开时,振荡闭锁将立即开放。
如果短路时刻发生在系统电势角摆开状态,则振荡闭锁将在系统角逐步减小时开放,也可能由一侧瞬时开放跳闸后另一侧相继速跳。
因此,采用对称分量元件开放振荡闭锁保证了在任何情况下,甚至系统已经发生振荡的情况下,发生区内故障时瞬时开放振荡闭锁以切除故障,振荡或振荡又区外故障时则可靠闭锁保护。
3. 对称故障开放元件
在起动元件开放160ms 以后或系统振荡过程中,如发生三相故障,则上述二项开放措施均不能开放振荡闭锁,本装置中另设置了专门的振荡判别元件,即测量振荡中心电压:
Φ=cos U U O S
U 为正序电压,Φ是正序电压和电流之间的夹角。
由图3.1,假定系统联系阻抗的阻抗角为90°,则电流向量垂直于M E 、N E 连线,与振荡中心电压同相。
在系统正常运行或系统振荡时,Φcos U 恰好反应振荡中心的正序电压;在三相短路时,Φcos U 为弧光电阻上的压降,三相短路
时过渡电阻是弧光电阻,弧光电阻上压降小于5%N U 。
E
O
I
图3.1 系统电压向量图 图3.2 短路电流电压向量图
而实际系统线路阻抗角不为90°,因而需进行角度补偿,如图3.2所示。
OD 为测量电压,Φcos U =OB ,因而OB 反应当线路阻抗角为90°时弧光电阻压降,实际的弧光压降为OA ,与线路压降AD 相加得到测量电压U 。
本装置引入补偿角L Φ-=090θ,由θ+Φ=Φ1,上式变为1cos Φ=U U O S ,三相短路时,OA OC U OS ≤=,可见1cos ΦU 可反应弧光压降。
本装置采用的动作判据分二部分:
● N O S N U U U 08.003.0<<- 延时150ms 开放
实际系统中,三相短路时故障电阻仅为弧光电阻,弧光电阻上压降的幅值不大于5%N U ,因此,三相短路时,该幅值判据满足,为了保证振荡时不误开放,其延时应保证躲过振荡中心电压在该范围内的最长时间;振荡中心电压为0.08N U 时,系统角为171°,振荡中心电压为-0.03N U 时,系统角为183.5°,按最大振荡周期3"计,振荡中心在该区间停留时间为104ms ,装置中取延时150ms 已有足够的裕度。
● N OS N U U U 25.01.0<<- 延时500ms 开放。
该判据作为第一部分的后备,以保证任何三相故障情况下保护不可能拒动。
振荡中心电压为0.25N U 时,系统角为151°,-0.1N U 时,系统角为191.5°,按最大振荡周期3"计,振荡中心在该区间停留时间为373ms ,装置中取500ms 已有足够的裕度。
4 .非全相运行时的振荡闭锁判据
非全相振荡时,距离继电器可能动作,但选相区为跳开相。
非全相再单相故障时,距离继电器动作的同时选相区进入故障相,因此,可以以选相区不在跳开
相作为开放条件。
另外,非全相运行时,测量非故障二相电流之差的工频变化量,当该电流突然增大达一定幅值时开放非全相运行振荡闭锁。
因而非全相运行发生相间故障时能快速开放。
以上二种情况均不能开放时,由第3部分作为后备。