双S型测力传感器
S型拉力传感器的工作原理
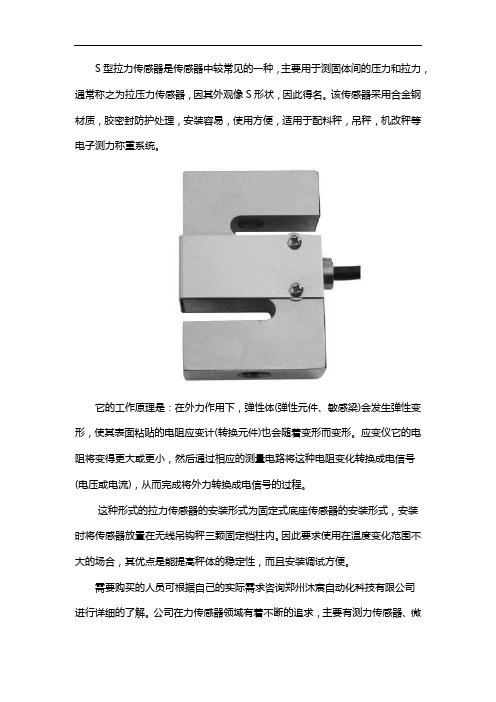
S型拉力传感器是传感器中较常见的一种,主要用于测固体间的压力和拉力,通常称之为拉压力传感器,因其外观像S形状,因此得名。
该传感器采用合金钢材质,胶密封防护处理,安装容易,使用方便,适用于配料秤,吊秤,机改秤等电子测力称重系统。
它的工作原理是:在外力作用下,弹性体(弹性元件、敏感梁)会发生弹性变形,使其表面粘贴的电阻应变计(转换元件)也会随着变形而变形。
应变仪它的电阻将变得更大或更小,然后通过相应的测量电路将这种电阻变化转换成电信号(电压或电流),从而完成将外力转换成电信号的过程。
这种形式的拉力传感器的安装形式为固定式底座传感器的安装形式,安装时将传感器放置在无线吊钩秤三颗固定档柱内。
因此要求使用在温度变化范围不大的场合,其优点是能提高秤体的稳定性,而且安装调试方便。
需要购买的人员可根据自己的实际需求咨询郑州沐宸自动化科技有限公司
进行详细的了解。
公司在力传感器领域有着不断的追求,主要有测力传感器、微
型拉压力传感器、拉杆力传感器、S型拉压力传感器、环形传感器、柱式传感器、等,能满足不同用户的需求。
机械工程测试技术习题课后题解答

1 求周期方波的傅立叶级数(复指数函数形式),画出|cn|-ω和ϕ-ω图。
(1)方波的时域描述为:(2) 从而:2 . 求正弦信号的绝对均值和均方根值。
(1)(2)3.求符号函数和单位阶跃函数的频谱解:(1)因为不满足绝对可积条件,因此,可以把符合函数看作为双边指数衰减函数:其傅里叶变换为:(2)阶跃函数:4. 求被截断的余弦函数的傅里叶变换。
解:(1)被截断的余弦函数可以看成为:余弦函数与矩形窗的点积,即:(2)根据卷积定理,其傅里叶变换为:5.设有一时间函数f(t)及其频谱如图所示。
现乘以余弦函数cosω0t(ω0>ωm)。
在这个关系中函数f(t)称为调制信号,余弦函数cosω0t称为载波。
试求调幅信号的f(t)cosω0t傅氏变换,并绘制其频谱示意图。
又:若ω0<ωm将会出现什么情况?解:(1)令(2) 根据傅氏变换的频移性质,有:频谱示意图如下:(3) 当ω0<ωm时,由图可见,出现混叠,不能通过滤波的方法提取出原信号f(t)的频谱。
6.求被截断的余弦函数的傅立叶变换。
解:方法一:方法二:(1)其中为矩形窗函数,其频谱为:(2)根据傅氏变换的频移性质,有:第二章4. 求指数衰减函数的频谱函数,()。
并定性画出信号及其频谱图形。
解:(1)求单边指数函数的傅里叶变换及频谱(2)求余弦振荡信号的频谱。
利用函数的卷积特性,可求出信号的频谱为其幅值频谱为a a`b b`c c`题图信号及其频谱图注:本题可以用定义求,也可以用傅立叶变换的频移特性求解。
5 一线性系统,其传递函数为,当输入信号为时,求:(1);(2);(3);(4)。
解:(1) 线性系统的输入、输出关系为:已知,则由此可得:(2) 求有两种方法。
其一是利用的傅立叶逆变换;其二是先求出,再求,其三是直接利用公式求。
下面用第一种方法。
(3)由可得:(4) 可以由的傅立叶逆变换求得,也可以直接由、积分求得:第三章1.说明线性系统的频率保持性在测量中的作用。
CL-YD系列压电式力传感器

董事长聘书合同范本《董事长聘书合同》甲方(聘任方):公司名称:[公司全称]法定代表人:[法人姓名]地址:[公司地址]联系方式:[联系电话]乙方(受聘方):姓名:[受聘人姓名]性别:[性别]身份证号码:[身份证号码]地址:[家庭地址]联系方式:[联系电话]鉴于甲方业务发展需要,为了进一步提高公司管理水平和经营效益,甲方决定聘请乙方担任公司董事长一职。
根据《中华人民共和国民法典》等相关法律法规的规定,甲乙双方在平等自愿、协商一致的基础上,订立本合同,共同遵守。
一、聘任职位及期限1. 甲方聘请乙方担任公司董事长,任期自[起始日期]起至[结束日期]止。
2. 任期届满,经双方协商一致,可以续聘。
二、岗位职责1. 主持和召集股东大会,并向股东大会报告工作。
2. 领导董事会工作,确保董事会决策的科学性和有效性。
3. 负责公司的战略规划和重大决策,推动公司的持续发展。
4. 代表公司对外签署重要文件和合同。
5. 监督公司的经营管理,确保公司的合法合规运营。
6. 履行法律法规和公司章程规定的其他职责。
三、工作条件和待遇1. 甲方为乙方提供必要的工作条件,包括办公场所、办公设备等。
2. 乙方的薪酬待遇为:基本年薪:人民币[X]元,按月平均发放。
绩效年薪:根据公司年度经营业绩和乙方的工作表现,由董事会确定发放金额。
其他福利:按照公司相关规定享受社会保险、住房公积金、带薪年假等福利。
四、工作时间和休息休假1. 乙方的工作时间为[工作时间安排],每周工作[X]天。
2. 乙方依法享受国家规定的法定节假日、婚假、产假、丧假等休假权利。
五、保密和竞业限制1. 乙方对在工作中知悉的甲方商业秘密、技术秘密和其他机密信息负有保密义务,未经甲方书面同意,不得向任何第三方披露或使用。
2. 未经甲方书面同意,乙方在任期内及离职后[竞业限制期限]内,不得在与甲方有竞争关系的单位工作或从事与甲方有竞争关系的业务。
3. 若乙方违反上述保密和竞业限制约定,应向甲方支付违约金人民币[X]元,并赔偿甲方因此造成的损失。
1.2 常用传感器工作原理及测量电路

三 电感式传感器工作原理
1 自感式传感器
线圈自感 L N 2 / li / i Si 2 / 0S
l i ——各段导磁体的长度; U i——各段导磁体的磁导率;
S i ——各段导磁体的截面积;δ ——空气隙的厚度;
U0 ——真空磁导率;
S ——空气隙截面积
L f ,S
L f1 变气隙型传感器
差动式电感传感器
• 为了改善线性在实际中大都采用差动式, 采
用两个相同的传感线圈共用一个衔铁。
• 要求两个导磁体的几何尺寸及材料完全相同,两个线圈的电
气参数和几何尺寸完全相同。
差动式优点:
1、线性好;
2、灵敏度提高一倍,即衔铁位移相同时, 输出信号大一倍;
3、温度变化、电源波动、外界干扰等对 传感器的影响,由于能够相互抵消而减小;
2C
交流电桥的输出电压与传感器的电容相对变化量成正比。
变压器电桥电路
➢电感式传感器和电容式传感器的转换电路还常采用变压器电 桥 ➢它的平衡臂为变压器的两个二次侧绕组,差动传感器的两差 动电容或差动电感分别接在另两个臂
设其阻抗分别为Z1和Z2, (由于被测量使传感器的阻抗发生变化)
Z1 Z Z
Z2 Z Z
压电传感器在受外力作用时,在两个电极表面 聚集电荷,电荷量相等,极性相反,相当于一个以 压电材料为电介质的电容器。可测量能变换为力的 各种物理量。
常用的压电材料
• 石英晶体 • 水溶性压电材料(酒石酸钾钠、硫酸锂、
磷酸二氢钾等)
• 铌酸锂晶体 • 压电陶瓷(钛酸钡压电陶瓷、锆钛酸铅
系压电陶瓷、铌酸盐系压电陶瓷)
4、电磁吸力对测力变化的影响也由于能 够相互抵消而减小。
2 差动变压器传感器(互感)
传感器课件-压电式传感器与超声波传感器

( 3 ) 铌 镁 酸 铅 Pb(MgNb)O3-PbTiO3-PbZrO3 压 电 陶 瓷 (PMN)
具有较高的压电系数,在压力大至700kg/cm2仍能 继续工作,可作为高温下的力传感器。
返回
上一页
下一页
18
返回
上一页
下一页
20
1. 压电元件的等效电路
压电传感器在受外力作用时,在两个电极 表面将要聚集电荷,且电荷量相等,极性相 反。这时它相当于一个以压电材料为电介质 的电容器,其电容量为
Ca
r0S
ε0为真空介电常数;ε为压电材料的相对介电常数; δ为压电元件的厚度;S为压电元件极板面积。
21
Ca
s
h
r0s
h
返回
上一页
下一页
U Q Ca
22
压电式传感器的等效电路
(a)等效为一个电荷源Q与一个电容Ca并联的电路 (b) 等效成一个电源U = Q/Ca 和一个电容Ca的串联电路
返回
上一页
下一页
23
两个压电片的联结方式
(a) “并联”,Q’=2Q,U’=U,C’=2C 并联接法输出电荷大,本身电容大,时间常数大, 适宜用在测量慢变信号并且以电荷作为输出量的地方, (b) “串联” Q’=Q,U’=2U,C’=C/2 而串联接法输出电压大,本身电容小。 适宜用于以电压作输出信号,且测量电路输入阻抗很高的地方。
(1+K)Cf>>(Ca+Cc+Ci)
返回
上一页
下一页
35
电荷放大器能将压电传感器输出的电荷
转换为电压(Q/U转换器),但并无放大 电荷的作用,只是一种习惯叫法。
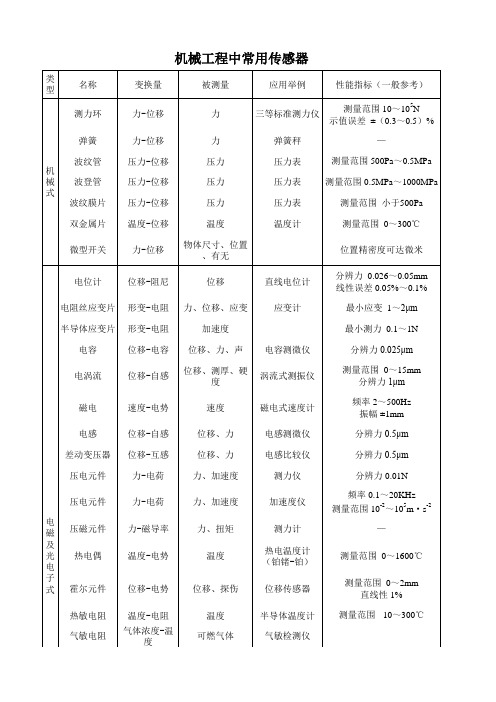
机械工程中常用传感器
超声 β 射线 气动 气动 流 体 式 气动 液体 液体 液体
厚度、探伤 厚度 尺寸、物体大小 距离 尺寸、间隙 压力 流量 流量
超声波测厚仪
气动量仪 气动量仪 浮标式气动量仪 活塞压力计 节流式流量计 转子式流量计
可测最小直径 0.05~ 0.076mm 测量间隙 6mm 分辨力 0.025mm 放大倍率 1000~10000 测量间隙 0.05~0.2mm 测量精密度 0.02%~0.2%
光电管 光栅
光电、数显 光-电
红外 X射线 γ射线 辐 射 式 激光
热-电
温度、物体有无
散射、干涉、 测厚、探伤、应 穿透 力 对物质穿透 光波干涉 测厚、探伤 长度、位移转角 、加速度
激光干涉测振仪 超声波反射、 穿透 穿透作用 尺寸-压力 间隙-压力 压力-尺寸 压力平衡 液体静压变化 液体阻力变化
霍尔元件 热敏电阻 气敏电阻
位移-电势 温度-电阻 气体浓度பைடு நூலகம்温 度
位移、探伤 温度 可燃气体
光敏电阻 光电池 光敏晶体管 光纤
光-电阻 光-电压 光-电流 声-光相位调 制 传光型
开、关量 硒光电池 转速、位移 声压 温度 长度、角度 长度 角度 光电转速仪 水听器 光纤辐射温度计 光学测长仪 长光栅 圆光栅 红外测温仪 X射线应力仪 成分分析 γ射线测厚仪 激光测长仪 测距2m 分辨力 0.2μm 振幅 ± (5~3)X10-4mm 频率 5~3KHz 测量范围 4~40mm 测量精度 ± 0.25mm 灵敏度 500μA/1m 最大截止频率 50KHz 检测最小声压 1μPa 测量范围 700~1100℃ 测量误差 小于5℃ 测量范围 0~500mm 最小划分值 0.1μm 测程 3mm 分辨力 0.05μm 分辨力 0.1" 测量范围 -10~1300℃ 分辨力 0.1℃
称重传感器选型

1.拉压两用传感器(即可单独测拉力或压力,也可以同时测拉压力)型号为: CXL-101(S 型) .CXL-102/CXH-118(柱式).CXL-110/CXL-119(筒式).CXH-117(轮辐式)
2.测压力荷重,型号为 CXH-103(轮辐式).CXH-106/CXH-109(油田专用).CXZ-107(轴销式),CXH-108(桥式).CXZ-111(轴承座
式).CXH-112/CXH-129(筒式).CXH-116/CXH-120(组合式).CXH-125(膜合).CXH-127(微型).CXH-126(柱 式).TJP-2(台式) 3.测钢丝绳拉力.型号为 CXH-105 /CXZ-111(轴承座式) 4.悬臂式压力测量.型号为 CXH-104.CXH-115.CXH-128. CXH-114(波纹管式). 5.测旁压张力.型号为 CXH-105
应用于高湿度环境,具有优越的抗扭抗侧抗偏载能力 。应
用于皮带秤,料斗秤,机电结合秤,吊钩秤及各种工程装置的测力
技术指标: 指标名称
性能指标
测量范围
0~5kg-10T
电源电压及输出灵敏度精度 10V DC
输出:≈1.5mV/V
24 V DC
输出:电流信号 4~20mA,电压信号 1~5VDC
精度
±0.1 % F· S, ±0.2 % F· S , ±0.5 % F· S
动控制设备接口或与计算机联网,变送器具备标准信号外调零,外调增益功能。
(1)传感器接线图
(2)二线制电流变送器接线图 (3)三线制电流、电压、变送器接线图
二、 使用说明
1. 传感器与放大器配接图
信号+黄
黄
传 信号-白
tecsis压力表,tecsis压力传感器

Tecsis P3297B074021 压力传感器 0-6 BAR R1/4(3297.074.021)
Tecsis P3297B075001 压力传感器 0-10BAR 4-20mA G1/4
Tecsis P3297B075021 压力传感器 0-10 BAR 4-20mA,R1/4(3297.075.021)
0.18 kg
0.18 kg
0.17 kg
Stainless steel, black Front flange or front ring with mounting bracket Dual scale
Ohter threads on request
ø 0.3 ; ø 0.4 ; ø 0.8
Models: P1450, P1452, P1456 DE 203 e p. 1 / 2
苏州迅鹏进口仪表事业部
Technical data
Models Nominal size Symbol
P1450
P1452 63
P1456
Options
Accuracy class Ranges
Application
Tecsis 3297.086.021 压力传感器 0-400 BAR R1/4
Tecsis 3297.087.021 压力传感器 0-600 BAR R1/4
Tecsis P3297B069021 压力传感器 0-1 BAR 4-20mA,R1/4(3297.069.021)
Tecsis P3297B073021 压力传感器 0-4 BAR 4-20mA,R1/4
Copper alloy up to 250 bar, above 400 bar stainless steel
s型传感器原理
s型传感器原理
S型传感器是一种常用于测量压力或力的传感器。
其工作原理
是利用材料的弹性变形来测量外部力的大小。
在S型传感器内部,通常采用了弹性材料,如钢或合金。
该
材料具有一定的弹性特性,当受到外部力作用时,会发生微小的形变。
S型传感器的设计使得受力的部分呈现出"S"字形状,这种形状可以增加传感器的灵敏度和可靠性。
当外部力作用于传感器时,S型传感器内的弹性材料会发生形变,使得传感器中的电阻或电容发生变化。
通过检测电阻或电容的变化,可以确定外部力的大小。
为了更准确地测量力或压力,S型传感器通常与电子测量电路
连接。
这些电路会将传感器信号放大,并将数据转换为可读取的格式,如电压或数字信号。
由于S型传感器内部弹性材料的特性,它具有较广泛的测量
范围和较高的精度。
此外,S型传感器还具有较小的尺寸和良
好的可靠性,因此在各种应用中得到广泛应用,如汽车制造、工业自动化和医疗设备等领域。
S型压力传感器

S型压力传感器是传感器中最为常见的一种传感器,主要用于测固体间的拉力和压力,通用也人们也称之为拉压力传感器。
因为它的外形像S形状,所以习惯上也称S型称重传感器。
下面就由S型压力传感器销售中心高灵传感为大家介绍一下相关知识吧,帮助大家更多了解。
S型压力传感器采用的是合金钢材质,胶密封防护处理,安装容易,使用方便,适用于吊秤,配料秤,机改秤等电子测力称重系统。
S型称重传感器工作原理S型压力传感器是基于这样一个原理:弹性体(弹性元件,敏感梁)在外力作用下产生弹性变形,使粘贴在他表面的电阻应变片(转换元件)也随同产生变形,电阻应变片变形后,它的阻值将发生变化(增大或减小),再经相应的测量电路把这一电阻变化转换为电信号(电压或电流),从而完成了将外力变换为电信号的过程。
S型称重传感器具有拉压两用的功能:拉力和压力两者都能测量其抗偏载能力方面,在众多传感器当中也是名列前茅的。
它的优势是精度高,测量范围好,安装方便在包装行业得到很多的应用。
工采网提供的S型称重传感器- 101BH具有拉压两用、防护等级IP67 、通用性强灵敏度高,可靠性高,寿命长,抗电磁干扰等优点可用于用于拉力称重,压力称重,量程是50kg-2t,可以用在吊钩秤,筒仓/漏斗/罐称重,起重机秤,叉车秤,计量/灌装,拉伸/拉力测量,试验机,搅拌站等。
蚌埠高灵传感系统工程有限公司在自主创新的基础上开发生产出力敏系列各类传感器上百个品种,各种应用仪器仪表和系统,以及各种起重机械超载保护装置,可以广泛应用于油田、化工、汽车、起重机械、建设、建材、机械加工、热电、军工、交通等领域。
公司除大规模生产各种规格的高精度、高稳定性、高可靠性常规产品外,还可根据用户具体要求设计特殊的非标传感器,以满足用户的特殊要求。
如果您想进一步的了解,可以直接点击官网高灵传感进行在线了解。
机械工程测试技术测试习题答案

习题1第3章1、 传感器的定义及主要分类有哪些?2、 试绘出典型传感器的构成框图?3、从哪些方面评价或选用传感器?4、在选用传感器时,应该遵循什么原则?5、应该采取什么方法来提高传感器的性能?第4章1 什么叫金属的电阻应变效应?金属丝的应变灵敏度系数的物理意义是什么?2 什么叫金属丝的应变灵敏度系数?它与金属丝的灵敏度系数有何区别?为什么?3 何谓半导体的压阻效应?它与金属的电阻应变效应有什么本质区别?4 电阻应变计的基本测量电路有哪些?试比较它们各自的特点。
5 电阻应变片与半导体应变片的工作原理有何区别?它们各有何特点?6 某截面积为52cm 的试件,已知材料的弹性模量为2.0×10112m /N ,沿轴向受到105N的拉力,若沿受力方向粘贴一阻值为120Ω、灵敏系数为2的应变片,试求出其R ∆。
7 试说明差动式电感传感器与差动变压器式电感传感器工作原理的区别。
8 差动变压器和普通变压器的工作原理有何区别?如何提高差动变压器的灵敏度? 9 试说明电涡流式传感器的工作原理和特点。
10 根据电容式传感器的工作原理分为几种类型?各有什么特点?适用于什么场合? 11 如何改善单极式变极距型传感器的非线性?12 什么是压电效应?压电材料有哪些?压电传感器的结构和应用特点是什么?能否用压电传感器测量静态压力?13 为什么压电传感器通常用来测量动态或瞬态参量?14 用压电式加速度计及电荷放大器测量振动加速度,若传感器的灵敏度为 70pC/ g (g 为重力加速度),电荷放大器灵敏度为10mV/pC ,试确定输入3g (平均值)加速度时,电荷放大器的输出电压Uo (平均值,不考虑正负号),并计算此时该电荷放大器的反馈电容C f 。
15.用压电式单向脉动力传感器测量一正弦变化的力,压电元件用两片压电陶瓷并联,压电常数为200×10 -12C/N ,电荷放大器的反馈电容 C f =2000pF ,测得输出电压u o =5sin wt (V )。
[整理版]传感器原理与应用习题_第6章压电式传感器
![[整理版]传感器原理与应用习题_第6章压电式传感器](https://img.taocdn.com/s3/m/5d1ab076453610661ed9f494.png)
[整理版]传感器原理与应用习题_第6章压电式传感器《传感器原理与应用》习题集与部分参考答案教材:传感器技术(第3版)贾伯年主编,及其他参考书第6章压电式传感器6-1 何谓压电效应,何谓纵向压电效应和横向压电效应,答:一些离子型晶体的电介质不仅在电场力作用下,而且在机械力作用下,都会产生极化现象。
且其电位移D(在MKS单位制中即电荷密度σ)与外应力张量T成正比: D = dT 式中 d—压电常数矩阵。
当外力消失,电介质又恢复不带电原状;当外力变向,电荷极性随之而变。
这种现象称为正压电效应,或简称压电效应。
若对上述电介质施加电场作用时,同样会引起电介质内部正负电荷中心的相对位移而导致电介质产生变形,且其应变S与外电场强度E成正比: S=dE 式中 d——逆压电常数矩阵。
这种现象称为逆压电tt效应,或称电致伸缩。
6-2 压电材料的主要特性参数有哪些,试比较三类压电材料的应用特点。
答:主要特性:压电常数、弹性常数、介电常数、机电耦合系数、电阻、居里点。
压电单晶:时间稳定性好,居里点高,在高温、强辐射条件下,仍具有良好的压电性,且机械性能,如机电耦合系数、介电常数、频率常数等均保持不变。
此外,还在光电、微声和激光等器件方面都有重要应用。
不足之处是质地脆、抗机械和热冲击性差。
压电陶瓷:压电常数大,灵敏度高,制造工艺成熟,成形工艺性好,成本低廉,利于广泛应用,还具有热释电性。
新型压电材料:既具有压电特性又具有半导体特性。
因此既可用其压电性研制传感器,又可用其半导体特性制作电子器件;也可以两者合一,集元件与线路于一体,研制成新型集成压电传感器测试系统。
6-3 试述石英晶片切型()的含意。
yxlt,50:/45:6-4 为了提高压电式传感器的灵敏度,设计中常采用双晶片或多晶片组合,试说明其组合的方式和适用场合。
答:(1)并联:C′,2C,q′=2q,U′=U,因为输出电容大,输出电荷大,所以时间常数,适合于测量缓变信号,且以电荷作为输出的场合。
S型称重传感器工作原理及安装方法
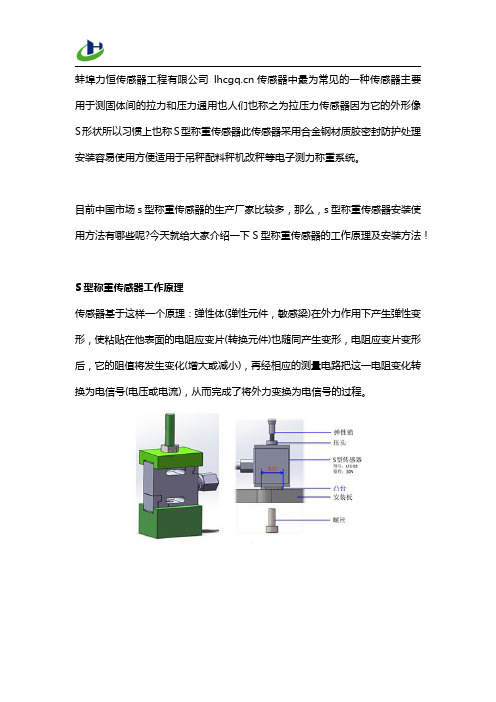
蚌埠力恒传感器工程有限公司传感器中最为常见的一种传感器主要用于测固体间的拉力和压力通用也人们也称之为拉压力传感器因为它的外形像S形状所以习惯上也称S型称重传感器此传感器采用合金钢材质胶密封防护处理安装容易使用方便适用于吊秤配料秤机改秤等电子测力称重系统。
目前中国市场s型称重传感器的生产厂家比较多,那么,s型称重传感器安装使用方法有哪些呢?今天就给大家介绍一下S型称重传感器的工作原理及安装方法!S型称重传感器工作原理传感器基于这样一个原理:弹性体(弹性元件,敏感梁)在外力作用下产生弹性变形,使粘贴在他表面的电阻应变片(转换元件)也随同产生变形,电阻应变片变形后,它的阻值将发生变化(增大或减小),再经相应的测量电路把这一电阻变化转换为电信号(电压或电流),从而完成了将外力变换为电信号的过程。
S型称重传感器安装方法1、根据所需工作环境来选定合适的传感器量程以及确定所用传感器的额定载荷,称重传感器虽然本身具备一定的过载能力,但在安装和使用过程中应尽量避免此种情况。
有时短时间的超载,也可能会造成传感器永久损坏。
2、称重传感器要轻拿轻放,尤其对于用合金铝材料作为弹性体的小容量传感器,任何振动造成的冲击或者跌落,都很有可能造成很大的输出误差。
3、安装前按说明书要求接线,常用接线方式:红色为电源正极,接到EXC+上,黑线为电源负极,接到EXC-上,绿线为信号正极,接到SIG+上,白线为信号负极,接到SIG-上,蓝线为反馈正极,接到SEN+上,黄线为反馈负极,接到SEN-上,各厂家出厂时线颜色可能不一样,具体请按说明书接线,4、传感器外壳、保护盖板、引线接头均经密封处理,不可随意打开,电缆线不宜自行加长,因为传感器电缆线在出厂时按输出电阻值调整过,自行加长或减短会影响到传感器输出电阻,为影响整个传感器精度,如果实在确实需加长时应在接头处锡焊,并加防潮密封胶,重新加电阻进行调整达到出厂时的默认输出电阻,5、传感器的电缆线应远离强动力电源线或有脉冲波的场所,这样可以减少现场干扰源对传感器信号输出,减少误差,提高精度。
应变片式传感器

悬臂梁式传感器的原理
• 当自由端产生挠度时,悬臂梁表面的应变 电桥就有输出.
悬臂弯曲等截面梁的设计 (1)、压力传感器
R1,2 P h e R3,4 b
6 P (l e) 2 bh
6 P (l e) 2 Ebh
2
力P与输出指示应变的关系
Ebh P i 24(l e)
说明
• 图(c)是两端固定支梁,应变片 贴在应变最大的中心部位,在 上下表面各贴两片。这种结构 当梁受力过载时容易产生非线 性误差.梁和壳体一般是做成一 体,避免两固定端在工作过程中 可能滑动而产生误差
• 图(d)是等强度悬臂梁,在梁的 上下表面各贴两片应变片,上 表面的应变片为拉应变,下表 面的应变片为压应变,四个应 变片组成全桥差动结构。这种 传感器具有结构简单、加工容 易、应变片容易粘贴、灵敏度 度较高等特点.
• 性能稳定,
• 工作可靠。
电阻应变计式传感器 组成
• 应变片 • 弹性元件 • 附件(补偿元件、防护罩、接线插 座、加载件)。
三、电阻应变式传感器的分类
• • • • • • • 测力传感器 称重传感器 扭距传感器 压力传感器 位移传感器及引伸计 振动(加速度)传感器 其它力学量传感器
电阻应变式传感器的 一般工作原理
如果桥压10V,应变片的灵敏系数为 K=2,
每伏桥压的输出(满量程)
S 型双连孔测力传感器
E
F
I
H
注:片1、3拉应变 片2、4压应变
• 四个应变片粘贴在截面最小处,应变最大 处,而且整个弹性元件上不存在应力集中 处 • EF IH易于变形 EI FH很刚硬
YZ101系列是一种S型结构的负荷传感器, 拉压均可使用。是一种结构设计上别具 特色的双复梁传感器,由于应变部位的 独到设计使其具有很高的过载能力和很 高的精度。
传感器原理与应用习题课后答案_第2章到第8章
《传感器原理与应用》及《传感器与测量技术》习题集与部分参考答案 教材:传感器技术(第3版)贾伯年主编,及其他参考书第2章 电阻式传感器2-1 金属应变计与半导体应变计在工作机理上有何异同?试比较应变计各种灵敏系数概念的不同物理意义。
答:(1)相同点:它们都是在外界力作用下产生机械变形,从而导致材料的电阻发生变化所;不同点:金属材料的应变效应以机械形变为主,材料的电阻率相对变化为辅;而半导体材料则正好相反,其应变效应以机械形变导致的电阻率的相对变化为主,而机械形变为辅。
(2)对于金属材料,灵敏系数K0=Km=(1+2μ)+C(1-2μ)。
前部分为受力后金属几何尺寸变化,一般μ≈0.3,因此(1+2μ)=1.6;后部分为电阻率随应变而变的部分。
金属丝材的应变电阻效应以结构尺寸变化为主。
对于半导体材料,灵敏系数K0=Ks=(1+2μ)+πE 。
前部分同样为尺寸变化,后部分为半导体材料的压阻效应所致,而πE>>(1+2μ),因此K0=Ks=πE 。
半导体材料的应变电阻效应主要基于压阻效应。
2-2 从丝绕式应变计的横向效应考虑,应该如何正确选择和使用应变计?在测量应力梯度较大或应力集中的静态应力和动态应力时,还需考虑什么因素?2-3 简述电阻应变计产生热输出(温度误差)的原因及其补偿办法。
答:电阻应变计的温度效应及其热输出由两部分组成:前部分为热阻效应所造成;后部分为敏感栅与试件热膨胀失配所引起。
在工作温度变化较大时,会产生温度误差。
补偿办法:1、温度自补偿法 (1)单丝自补偿应变计;(2) 双丝自补偿应变计2、桥路补偿法 (1)双丝半桥式;(2)补偿块法2-4 试述应变电桥产生非线性的原因及消减非线性误差的措施。
答:原因:)(211)(44433221144332211R R R R R R R R R R R R R R R R U U ∆+∆+∆+∆+∆-∆+∆-∆=∆ 上式分母中含ΔRi/Ri ,是造成输出量的非线性因素。
2020年高三二轮复习 强基础专题十三:力学实验(解析版)
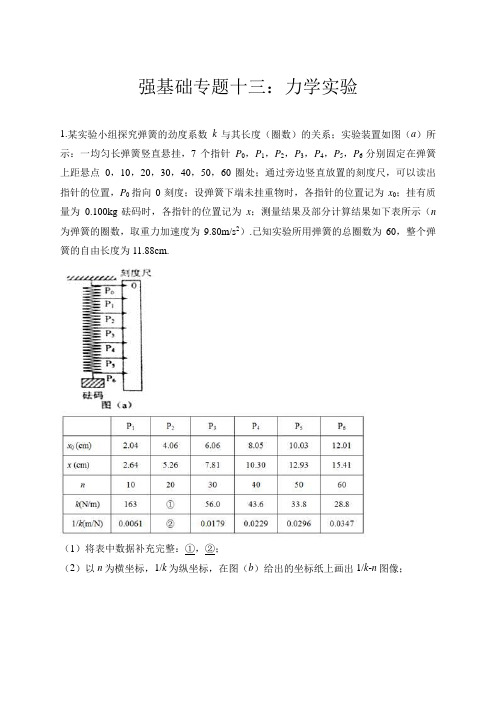
强基础专题十三:力学实验1.某实验小组探究弹簧的劲度系数k与其长度(圈数)的关系;实验装置如图(a)所示:一均匀长弹簧竖直悬挂,7个指针P0,P1,P2,P3,P4,P5,P6分别固定在弹簧上距悬点0,10,20,30,40,50,60圈处;通过旁边竖直放置的刻度尺,可以读出指针的位置,P0指向0刻度;设弹簧下端未挂重物时,各指针的位置记为x0;挂有质量为0.100kg砝码时,各指针的位置记为x;测量结果及部分计算结果如下表所示(n 为弹簧的圈数,取重力加速度为9.80m/s2).已知实验所用弹簧的总圈数为60,整个弹簧的自由长度为11.88cm.(1)将表中数据补充完整:①,②;(2)以n为横坐标,1/k为纵坐标,在图(b)给出的坐标纸上画出1/k-n图像;(3)图(b)中画出的直线可以近似认为通过原点;若从实验中所用的弹簧截取圈数为n的一段弹簧,该弹簧的劲度系数k与其圈数n的关系的表达式为k=③N/m;该弹簧的劲度系数k与其自由长度l0(单位为m)的表达式为k=④N/m.2.实验中,如图所示为一次记录小车运动情况的纸带,图中A,B,C,D,E为相邻的计数点,相邻计数点间的时间间隔T=0.1s.根据纸带可判定小车做_______运动. 根据纸带计算各点瞬时速度:___m/s,____m/s(2)建筑,桥梁工程中所用的金属材料(如钢筋钢梁等)在外力作用下会伸长,其伸长量不仅与和拉力的大小有关,还和金属材料的横截面积有关.人们发现对同一种金属,其所受的拉力与其横截面积的比值跟金属材料的伸长量与原长的比值的比是一个常数,这个常数叫做杨氏模量.用E表示,即:E=;某同学为探究其是否正确,根据下面提供的器材:不同粗细不同长度的同种金属丝;不同质量的重物;螺旋测微器;游标卡尺;米尺;天平;固定装置等.设计的实验如图所示.该同学取一段金属丝水平固定在固定装置上,将一重物挂在金属丝的中点,其中点发生了一个微小下移h(横截面面积的变化可忽略不计)。
s型传感器工作原理

s型传感器工作原理
S型传感器是一种常见的压力传感器,其工作原理基于杨氏模
量和结构形状的变化。
S型传感器由薄膜和结构支架组成。
当外界施加压力或力矩作
用于传感器时,薄膜的形状会发生变化,由此导致膜片上的应变量发生变化。
换言之,当传感器受到压力时,薄膜经历微小的弯曲,使得薄膜处于张应变或压应变状态。
这些应变量会导致薄膜材料的杨氏模量发生变化。
通过将S型传感器连接到一个电桥电路中,可以测量薄膜的
应变量。
电桥电路的一个臂通过一个稳定的参考电源来提供电流,另一个臂通过传感器的电阻值来提供电流。
当传感器受到压力时,其电阻值发生变化,从而引起电桥电路中的电势差变化。
通过测量电桥电路的电势差,可以确定传感器受到的压力大小。
常见的S型传感器可以测量范围从几克到数吨的压力。
S型传感器的工作原理简单而可靠,广泛用于工业控制领域、
汽车工业、医疗仪器和家用电器等应用中。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
(+): (+): (-):
Input( + ): Red Output (+): Green Input(-) :Black Output (-): White Shield
8
M6(2x)
(-):
/ Technical Paramters
Capacity Accuracy R a t ed O u t pu t Excitation Zero Balance Nonlinearity Hysteresis Nonrepeatability Greep(30min) Safe Overload Ultimate Overload Compensated Temp Operating Temp Temp.Shift Zero Temp.Shift Spen Input Resistance Output Resistance Insulation Resistance Ingress Protection M ater ial o f E lement Cable
Ø3*1500mm
46
www .
Pursue Excellence
Ø5.1
S S-type pull p10
5
Ø8.5 52 20
50
6 12
6
/ Schematic Wiring Diagram
Load Direction
Pursue Excellence
S S-type pull pressure sensor
Model: V S25
25
13
35
10
Load Direction
M6(2x)
/ Schematic Wiring Diagram
(+): Input( + ): Red Output (+): Green Input(-) :Black Output (-): White Shield
17
15
9
(+): (-): (-):
/ Technical Paramters
Capacity Accuracy R a t ed O u t pu t Excitation Zero Balance Nonlinearity Hysteresis Nonrepeatability Greep(30min) Safe Overload Ultimate Overload Compensated Temp Operating Temp Temp.Shift Zero Temp.Shift Spen Input Resistance Output Resistance Insulation Resistance Ingress Protection M ater ial o f E lement Cable
1/2/3/5/10/15/20/30/50kg 1kg=0.6g
1 . 7 - 2 . 2 mV/V 5 ~ 12 V ± 2 % R.O. ± 0. 08 % R.O. ± 0. 08 % R.O. ± 0 . 08 % R.O. ± 0. 05 % R.O. 1 20 % F.S. 150% F.S. -10...+40°C -20...+60°C ± 0.0 5 % R.O./°C ± 0.0 5 % R.O./°C 406 ±2 0Ω 350 ± 5 Ω >5000 MΩ (50V) I p6 5 /Aluminum alloy
(+): (+): (-):
Input( + ): Red Output (+): Green Input(-) :Black Output (-): White Shield
8
M6(2x)
(-):
/ Technical Paramters
Capacity Accuracy R a t ed O u t pu t Excitation Zero Balance Nonlinearity Hysteresis Nonrepeatability Greep(30min) Safe Overload Ultimate Overload Compensated Temp Operating Temp Temp.Shift Zero Temp.Shift Spen Input Resistance Output Resistance Insulation Resistance Ingress Protection M ater ial o f E lement Cable
Ø3*1500mm
46
www .
2/5/10/20/30/50/60/100kg 1kg=0.4g
1 . 7 - 2 . 3 mV/V 5 ~ 15 V ± 2 % R.O. ± 0. 04 % R.O. ± 0. 04 % R.O. ± 0 . 03 % R.O. ± 0. 04 % R.O. 1 50 % F.S. 200% F.S. -10...+40°C -20...+60°C ± 0.0 5 % R.O./°C ± 0.0 5 % R.O./°C 406 ±2 0Ω 350 ± 5 Ω >5000 MΩ (50V) I p6 5 /Aluminum alloy
Ø4*1500mm
44
www .
Pursue Excellence
Ø5.1
S S-type pull pressure sensor
Model: V S52
10
5
Ø8.5 52 20
50
6 12
6
/ Schematic Wiring Diagram
Load Direction
1/2/3/5/10/15/20kg
1kg=0.3g 2 . 0±10 %mV/V 5 ~ 15 V ± 2 % R.O. ± 0. 03 % R.O. ± 0. 03 % R.O. ± 0 . 03 % R.O. ± 0. 03 % R.O. 150% F.S. 200% F.S. -10...+40°C -20...+60°C ± 0.0 5 % R.O./°C ± 0.0 5 % R.O./°C 406 ±2 0Ω 350 ± 5 Ω >5000 MΩ (50V) I p6 5 /Aluminum alloy
1/2/3/5/10/15/20kg
1kg=0.3g 2 . 0±10 %mV/V 5 ~ 15 V ± 2 % R.O. ± 0. 03 % R.O. ± 0. 03 % R.O. ± 0 . 03 % R.O. ± 0. 03 % R.O. 150% F.S. 200% F.S. -10...+40°C -20...+60°C ± 0.0 5 % R.O./°C ± 0.0 5 % R.O./°C 406 ±2 0Ω 350 ± 5 Ω >5000 MΩ (50V) I p6 5 /Aluminum alloy
/ CAP(kg)
B
C
D
A
E
(-):
2 5 / 10 / 20 30 / 50 / 60 / 100
50.8 50.8 50.8
10 12.7 25.4
14 17 30
63.5 63.5 76.2
M6*1 M6*1 M12*1.75
/ Technical Paramters
Capacity Accuracy R a t ed O u t pu t Excitation Zero Balance Nonlinearity Hysteresis Nonrepeatability Greep(30min) Safe Overload Ultimate Overload Compensated Temp Operating Temp Temp.Shift Zero Temp.Shift Spen Input Resistance Output Resistance Insulation Resistance Ingress Protection M ater ial o f E lement Cable
Ø3*1500mm
www .
43
Pursue Excellence
S S-type pull pressure sensor
Model:V S50A
Load Direction
/ Schematic Wiring Diagram
(+): (+): (-): Input( + ): Red Output (+): Green Input(-) :Black Output (-): White Shield