基于A_算法的空间机械臂避障路径规划
机器人自主导航技术的路径规划和避障策略

机器人自主导航技术的路径规划和避障策略机器人自主导航是指机器人能够在无人干预的情况下,根据外部环境和自身感知信息,自主地决策和规划路径,以达到预定目标的能力。
路径规划和避障是机器人自主导航中两个重要的技术环节,下面将对这两个方面的技术进行全面的介绍和探讨。
路径规划是指机器人通过一系列算法和决策机制,在环境中找到一条最优或次优的路径,以达到目标点。
路径规划主要有两种方法,一种是基于图算法的方法,另一种是基于采样的方法。
基于图算法的路径规划方法主要有最短路径算法和搜索算法。
其中最常使用的最短路径算法是A*算法和Dijkstra算法。
A*算法是一种适用于有向图的寻路算法,通过综合考虑启发式评估函数和实际路程代价,能够在保证最佳路径的同时,有效地减少搜索空间。
Dijkstra算法则主要用于无向图的单源最短路径求解,通过不断更新路径的距离估计值,可以找到起点到各个顶点的最短路径。
这两种算法结合启发式评估函数等方法,可以在复杂的环境中高效地规划路径。
另一种基于采样的路径规划方法是通过对环境进行采样,然后利用采样数据进行路径搜索。
常见的算法有RRT算法和PRM算法。
RRT算法通过随机采样和迭代生成一棵树形结构,再根据目标点进行路径搜索。
PRM算法则是先进行采样,然后建立一个具有连接关系的节点集合,最后根据环境中的障碍物信息进行检查和优化。
这两种采样算法具有较强的鲁棒性和适应性,对于不确定的环境可以依然能够找到一条较为合适的路径。
除了路径规划,避障也是机器人导航中一个非常关键的环节。
机器人在移动过程中需要不断对周围环境进行感知,以避免碰撞和采取必要的规避动作。
避障主要有两种策略:基于传感器的避障和基于模型的避障。
基于传感器的避障策略是依靠机器人的传感器获取周围环境的信息,并基于这些信息做出避障决策。
常用的传感器有激光雷达、摄像头、超声波传感器等。
激光雷达可以通过扫描环境,获取障碍物的距离和形状信息,从而判断机器人行进的安全路径。
机器人路径规划与避障算法设计与实现

机器人路径规划与避障算法设计与实现随着人工智能技术的飞速发展,机器人在各个领域的应用越来越广泛。
机器人路径规划与避障是机器人导航和定位中的核心问题,对于机器人能否正常完成任务具有关键性的影响。
本文将介绍机器人路径规划与避障算法的设计与实现方法。
1. 问题描述机器人路径规划与避障是指在给定环境下,机器人需要找到从起点到目标点的最优路径,并且在路径上避开障碍物。
在实际应用中,机器人所处的环境通常是复杂且动态变化的,因此路径规划与避障算法需要具备高效、稳定、实时的特点。
2. 基本概念与方法2.1 基本概念在路径规划与避障中,需要明确几个基本概念:- 机器人自身状态:包括位置、朝向等参数,用于确定机器人当前所处的位置和姿态。
- 环境地图:用于描述机器人所处环境的信息,包括障碍物的位置、大小等。
- 目标点:机器人需要到达的目标位置。
2.2 基本方法路径规划与避障算法的基本方法可以分为离散方法与连续方法。
- 离散方法:将环境分割为离散的网格,采用搜索算法,如A*算法、Dijkstra算法等,通过遍历网格来搜索最优路径。
- 连续方法:将环境表示为连续的空间,采用优化算法,如启发式搜索算法、遗传算法等,通过优化目标函数来寻找最优路径。
3. 常见的路径规划与避障算法3.1 A*算法A*算法是一种经典的路径规划算法,它基于图搜索的思想,通过计算启发式函数来评估下一步移动的优先级。
A*算法综合考虑了路径长度和启发式函数的信息,能够找到最优路径。
3.2 Dijkstra算法Dijkstra算法也是一种常用的路径规划算法,它通过计算距离来选择下一步移动的优先级。
Dijkstra算法适用于无权图的路径规划,可以找到最短路径。
3.3 动态规划算法动态规划算法是一种优化计算的方法,可以求解具有重叠子问题性质的问题。
在路径规划与避障中,动态规划算法可以用来求解最优路径问题。
4. 避障算法设计与实现避障算法需要根据实际环境中的障碍物来确定机器人的行动策略。
机器人导航技术中的路径规划算法与避障机制优化

机器人导航技术中的路径规划算法与避障机制优化机器人导航技术是人工智能与机器人技术的重要领域之一,它的目标是使机器人能够自主地在环境中规划路径,完成任务并避免障碍物。
路径规划算法和避障机制是实现机器人导航的关键技术,本文将讨论这两个方面的优化方法。
路径规划算法是机器人导航技术中的核心,它决定了机器人如何选择最优路径以达到目标位置。
常见的路径规划算法包括最短路径算法、A*算法和D*算法等。
最短路径算法是一种常用的路径规划算法,它通过计算地图中各个节点之间的距离,找到两点之间最短的节点路径。
然而,在实际应用中,地图往往是动态变化的,例如出现了新的障碍物或者特定区域需要避障。
因此,需要对最短路径算法进行优化,使其能够应对动态环境的变化。
一种优化最短路径算法的方法是引入启发式信息,例如通过地图上的特定节点的评估函数来估计到目标点的距离。
启发式搜索算法,如A*算法就是一种典型的通过引入启发信息综合评估节点的路径规划算法。
通过将启发式评估函数与节点的真实代价函数结合,A*算法能够保证找到最小代价的路径,并且具有较高的搜索效率。
D*算法是另一种优化路径规划的算法,它基于增量式搜索,通过按需更新路径规划结果,动态地适应环境的变化。
D*算法通过不断地重新评估节点之间的代价,实现在动态环境中实时规划路径的能力。
除了路径规划算法的优化,机器人导航还需要考虑避障机制。
避障机制决定了机器人如何避开动态的和静态的障碍物,以确保安全地到达指定位置。
传统的避障机制主要使用的是基于传感器的反应式方法。
机器人通过感知环境中的障碍物,采取相应的行动来避免碰撞。
然而,这种反应式的方法在复杂的环境中可能会出现错误判断和避障不灵活的问题。
为了优化避障机制,研究人员提出了基于学习和规划的方法。
这些方法结合了机器学习和路径规划算法,使机器人能够从经验中学习并规划最优的避障路径。
例如,深度强化学习算法可以让机器人通过与环境的交互,自主学习出合适的避障策略。
机器人路径规划与避障技术研究
机器人路径规划与避障技术研究随着人工智能技术的快速发展,机器人已经成为各行各业的重要辅助工具。
机器人的路径规划和避障技术是其顺利执行任务的关键能力。
本文将着重探讨机器人路径规划和避障技术的研究进展和应用。
一、机器人路径规划技术研究路径规划是指机器人在复杂环境中选择合适的路径以达到目标点的过程。
常见的路径规划算法包括A*算法、Dijkstra算法和遗传算法等。
这些算法用于在离散或连续空间中搜索最优路径。
近年来,还兴起了一些基于学习的路径规划方法,如强化学习算法和深度学习算法。
1. 传统路径规划算法A*算法是一种常用的启发式搜索算法,它通过估计函数来预测到目标点的代价,并通过优先级队列来管理节点的选择顺序。
Dijkstra算法则是一种经典的图搜索算法,它通过计算每个节点的累计代价来寻找最短路径。
这些传统算法在小规模环境中表现良好,但在大规模或者复杂环境下计算复杂度较高。
2. 基于学习的路径规划方法强化学习算法是一种通过试错学习来优化路径规划的方法。
例如,Q学习和深度Q网络(DQN)可以通过与环境的交互获取最优策略并进行路径规划。
深度学习算法可以从大量的训练数据中学习到复杂的路径规划模型,例如卷积神经网络(CNN)和循环神经网络(RNN)等。
这些方法在复杂环境中表现出了更好的性能。
二、机器人避障技术研究机器人在执行任务时必须能够避开障碍物以确保安全和高效。
避障技术是一项研究机器人避开障碍物的关键技术。
常见的避障技术包括传感器融合、环境建模和运动规划等。
1. 传感器融合机器人通过多种传感器获取环境信息,如摄像头、激光雷达和超声波传感器等。
传感器融合技术通过融合多个传感器的数据来提高环境感知的准确性和鲁棒性。
例如,扩展卡尔曼滤波(EKF)和粒子滤波器可以通过对不同传感器数据进行融合来估计机器人所处位置和环境的状态。
2. 环境建模机器人需要对环境进行建模,以便有效地规划避障路径。
环境建模可以通过点云地图或栅格地图等方式实现。
无人机技术中的路径规划与避障算法研究
无人机技术中的路径规划与避障算法研究无人机技术作为一项快速发展的创新领域,已广泛应用于军事、民用和商业领域。
无人机在航拍、物流配送、农作物喷洒等领域具有巨大的潜力,然而,要使无人机能够安全、高效地完成任务,路径规划和避障算法是至关重要的。
路径规划是指根据任务要求,确定无人机的航行路径。
路径规划算法需要有效地计算出一条安全、最短或最优的路径,在考虑环境条件、飞行速度和飞行高度等因素的同时,确保无人机航行的稳定性和可靠性。
常用的路径规划算法包括A*算法、Dijkstra算法、遗传算法等。
A*算法是一种基于图搜索的启发式搜索算法,广泛应用于路径规划中。
该算法通过估计从起点到目标点的代价函数来评估航线的优劣,找到最佳路径。
A*算法综合考虑了航线路径的长度和启发性估计,使得路径规划更加高效。
在无人机技术中,A*算法可用于计算无人机避开障碍物的安全路径,提高航行的安全性和效率。
Dijkstra算法是另一种常用的路径规划算法,它通过计算从起点到其他节点的最短路径,将整个航线图表示成一张无向或有向图,并利用路径长度和权重等参数,确定最短路径。
Dijkstra算法广泛应用于无人机的地面控制系统,通过避免障碍物等对航行造成的影响,实现无人机的精确航行。
遗传算法是一种模仿生物进化过程的优化算法,能够解决复杂的优化问题。
在无人机技术中,遗传算法可用于路径规划和避障算法的优化。
通过对路径上不同节点的变异和交叉操作,使得无人机能够选择最佳路径,并快速适应环境的变化。
除了路径规划,避障算法是保障无人机安全飞行的另一个关键环节。
避障算法通过实时感知环境中的障碍物,动态调整无人机的航线,以避开障碍物,消除碰撞风险。
常用的避障算法包括基于传感器的避障算法、视觉感知算法和机器学习算法。
基于传感器的避障算法是最常见的无人机避障技术之一。
通过使用激光雷达、超声波传感器和红外线传感器等设备,无人机可以实时感知周围环境中的障碍物,并更新航线以避开障碍物。
机器人路径规划与避障算法研究
机器人路径规划与避障算法研究引言:随着人工智能的快速发展和机器人技术的日益成熟,机器人在各个领域广泛应用。
而在机器人的运动控制中,路径规划和避障算法是非常关键的一部分。
本文将探讨机器人路径规划与避障算法的研究现状和发展趋势,旨在为相关研究和应用提供参考。
一、路径规划的基本原理在机器人的运动中,路径规划是指根据起点和终点的位置以及环境等因素,确定机器人行进的最佳路径。
路径规划主要有两种基本原理:全局路径规划和局部路径规划。
1. 全局路径规划全局路径规划主要针对的是静态环境,即环境的地图是已知的情况下。
常用的算法有A*算法、Dijkstra算法等。
A*算法是一种启发式搜索算法,通过评估当前位置到目标位置的代价,选择最优路径。
Dijkstra算法则是基于图的最短路径算法。
这些算法在规划全局路径时,可以在较短时间内得出较优路径。
缺点是当环境非常复杂时,全局路径规划往往需要大量的计算资源,执行效率低下。
2. 局部路径规划局部路径规划是指面对动态环境中的障碍物和实时变化的条件,机器人能够实时调整运动轨迹以避免碰撞。
常用的算法有最近点算法、弗洛伊德算法等。
通过对机器人周围环境进行实时感知和分析,可以得出避障的策略。
局部路径规划主要考虑机器人的实时性和动态碰撞的问题,运算效率要求较高。
二、避障算法的研究与发展在机器人的行动中,避障是一项重要的任务。
通过合理选择避障算法,可以确保机器人的运动安全和稳定。
1. 基于传感器的避障算法基于传感器的避障算法是利用机器人的传感器对环境进行实时感知和分析,从而确定避障策略。
常见的传感器包括激光雷达、摄像头和红外传感器等。
通过收集传感器数据,机器人可以识别和跟踪障碍物,并避免与其碰撞。
这种算法的优点是实时性强,但受限于传感器的精度和范围。
2. 基于规划的避障算法基于规划的避障算法是通过路径规划的方法,在规划路径的同时考虑环境中的障碍物。
常用的方法包括速度阈值法、人工势场法等。
速度阈值法将机器人的速度限制为低于碰撞阈值,从而使机器人避开障碍物。
基于A_算法的空间机械臂避障路径规划

机 械 工 程 学 报JOURNAL OF MECHANICAL ENGINEERING 第46卷第13期2010年7月Vol.46 No.13 Jul. 2010DOI :10.3901/JME.2010.13.109基于A *算法的空间机械臂避障路径规划*贾庆轩 陈 钢 孙汉旭 郑双奇(北京邮电大学自动化学院 北京 100876)摘要:针对空间机械臂在轨操作任务需求,提出一种基于A*算法的避障路径规划算法。
根据机械臂和障碍物几何特征,对机械臂模型和障碍模型进行简化。
通过研究机械臂本身所固有的几何特性,根据障碍物的位姿坐标,分析机械臂各杆件与障碍物发生碰撞的条件,进而求解空间机械臂的无碰撞自由工作空间。
在此基础上,利用A*算法在空间机械臂的自由工作空间进行无碰撞路径搜索,实现了空间机械臂的避障路径规划。
通过仿真试验验证了基于A*算法的空间机械臂避障路径规划算法的有效性与可行性。
关键词:空间机械臂 避障路径规划 A*算法 中图分类号:TP242Path Planning for Space Manipulator to Avoid ObstacleBased on A * AlgorithmJIA Qingxuan CHEN Gang SUN Hanxu ZHENG Shuangqi(Automation School , Beijing University of Posts and Telecommunications, Beijing 100876)Abstract :A novel path planning method to avoid obstacle based on A* algorithm is presented for space manipulator to accomplish the in-orbit mission. According to the geometric characteristics of manipulator and obstacle, the manipulator model and obstacle model are simplified. On the basis of the inherent geometric characteristic of manipulator, and according to the position and orientation coordinates of obstacle, the collision conditions of all links of manipulator are analyzed. And then, the collision-free workspace of space manipulator is obtained. On this basis, the collision-free path search in the free workspace of space manipulator is carried out by using A* algorithm, thereby, the obstacle avoidance path planning is achieved. The effectiveness and feasibility of the proposed path planning algorithm based on A* algorithm for space manipulator to avoid obstacle are verified by simulation and experiment.Key words :Space manipulator Obstacle avoidance path planning A* algorithm0 前言随着空间探索的不断深入,空间机械臂应用技术已经成为空间技术的重要研究方向。
智能机器人路径规划与避障算法研究

智能机器人路径规划与避障算法研究智能机器人一直是人类科技发展的梦想,它不仅能够完成人类的工作任务,还能为人类提供便利的生活服务。
而路径规划与避障算法作为智能机器人中的重要组成部分,对于机器人的行动能力和安全性具有关键影响。
本文将围绕智能机器人路径规划与避障算法进行研究,探讨机器人在不同环境中如何高效地规划路径并避开障碍物。
一、路径规划算法的研究路径规划是指在给定起点和终点的情况下,寻找一条满足特定约束条件的路径。
在智能机器人中,路径规划的目标是找到一条最短路径或最优路径,使机器人能够快速高效地到达目标位置。
目前常用的路径规划算法包括A*算法、Dijkstra算法、BFS算法等。
A*算法是路径规划中最常用也最经典的算法之一。
它通过启发式搜索来寻找最优路径,以减少搜索的时间和空间复杂度。
A*算法采用一个估价函数来评估每个路径的优劣,将已走过的路径和未走过的路径权衡在一起,从而找到一条在时间和空间上较优的路径。
然而,A*算法在处理复杂环境中的路径规划问题时存在着搜索空间过大和路径不可行的问题。
为了解决A*算法的不足,研究者们提出了改进算法,如D*算法和RRT算法。
D*算法通过在运动中对路径进行修正,逐步优化原始路径,从而减少路径规划中的计算量。
RRT算法是一种快速探索随机空间的算法,通过不断生成随机节点,建立快速探索树,从而快速找到路径。
这些改进算法相对于A*算法在效率和准确性上有了较大的提升。
二、避障算法的研究除了路径规划外,智能机器人还需要具备避免碰撞的能力,以保证行动的安全性。
避障算法的研究目标是在不碰撞的前提下,使机器人从起点快速到达目标点。
常见的避障算法包括基于感知的避障算法和基于规划的避障算法。
基于感知的避障算法主要通过传感器获取周围环境的信息,并基于这些信息做出决策。
例如,利用激光雷达、摄像头等传感器检测周围障碍物的位置与形状,然后根据检测结果调整机器人的行进方向,避开障碍物。
这种算法在实时性和响应性方面表现出较好的性能,但对传感器的精度和算法的稳定性要求较高。
避障路径规划的算法研究
避障路径规划的算法研究避障路径规划是在机器人、无人驾驶等领域中非常重要的技术,用于避免机器人或车辆在运动过程中遇到障碍物。
随着科技的不断发展,避障路径规划算法的研究也越来越受到。
本文旨在探讨避障路径规划算法的研究现状、方法及其优缺点,展望未来的研究方向,并对其进行详细综述。
避障路径规划算法的研究始于20世纪80年代,随着计算机技术和机器人技术的不断发展,越来越多的学者投入到该领域的研究中。
目前,国内外的研究现状主要包括以下几种方法:基于几何的方法:该方法利用几何学的原理,通过计算机器人与障碍物之间的距离和角度来确定避障路径。
代表性的算法有欧几里得距离算法和可视图法。
基于搜索的方法:该方法通过搜索算法来寻找机器人从起始点到目标点的最优路径,同时避免障碍物。
代表性的算法有A*算法、Dijkstra 算法和Bellman-Ford算法等。
基于概率的方法:该方法通过概率论的原理,建立机器人与障碍物之间的概率模型,从而确定避障路径。
代表性的算法有粒子群算法和遗传算法等。
本文采用基于搜索的方法研究避障路径规划算法,具体实现过程如下:建立机器人运动的数学模型,包括机器人的运动学参数、动力学参数和环境参数等;利用A*算法搜索出机器人从起始点到目标点的最优路径;在搜索过程中,将障碍物作为约束条件加入到搜索过程中,避免机器人与障碍物碰撞;研究结果通过实验验证,本文所研究的避障路径规划算法可以在不同的场景下有效地避开障碍物,找到最优的路径。
同时,该算法具有较低的时间复杂度,可以在实时性要求较高的场景下应用。
然而,该算法仍存在一些局限性,例如在复杂环境下搜索效率有待进一步提高。
本文对避障路径规划算法进行了详细综述,并提出了基于搜索的避障路径规划算法。
通过实验验证,该算法可以有效地避开障碍物,并在不同的场景下找到最优路径。
然而,该算法仍存在一些局限性,未来研究可以以下几个方面:复杂环境下的避障路径规划:针对复杂环境下的避障路径规划,可以研究更为高效的搜索算法,提高算法的搜索效率和鲁棒性;多机器人协同避障:针对多机器人协同运动时的避障问题,可以研究多机器人之间的协调与协作机制,实现多机器人的协同避障;动态环境下避障路径规划:针对动态环境下的避障路径规划,可以研究环境模型的动态更新与预测方法,以适应环境的变化;混合智能避障路径规划:将传统方法与智能方法相结合,利用混合智能优化算法进行避障路径规划,提高算法的性能与适应性。
机械臂轨迹规划及避障算法研究

机械臂轨迹规划及避障算法研究近年来,机械臂技术得到了长足的发展和应用。
机械臂的运动轨迹规划和避障算法是实现其灵活性和自主性的关键。
本文将探讨机械臂轨迹规划及避障算法的研究进展。
一、机械臂轨迹规划的重要性机械臂的轨迹规划是为了使机械臂能够按照既定的路径进行精确的运动。
这对许多领域的应用都非常关键,比如工业制造、医疗手术等。
良好的轨迹规划可以提高机械臂的工作效率和精度,减少能源消耗和损耗,提高生产速度和质量。
目前,机械臂轨迹规划主要有两种方法:基于几何和基于搜索。
二、基于几何的机械臂轨迹规划算法基于几何的机械臂轨迹规划算法是根据机械臂的几何结构和关节运动空间进行规划的。
常用的算法有反向运动学和运动插值等。
反向运动学是一种常用的机械臂轨迹规划算法,通过将目标位置和姿态转换为各个关节的角度,实现机械臂的精确定位。
运动插值则是通过定义一系列路径点,然后插值计算机械臂在这些点之间的运动轨迹,达到平滑移动的效果。
然而,基于几何的机械臂轨迹规划算法在面对复杂环境时存在困难,比如存在多个障碍物或者局部特殊约束。
因此,基于搜索的机械臂轨迹规划算法也逐渐引起了人们的注意。
三、基于搜索的机械臂轨迹规划算法基于搜索的机械臂轨迹规划算法常用的有遗传算法、粒子群算法和蚁群算法等。
这些算法通过搜索问题的解空间来寻找最优的运动轨迹。
遗传算法是一种模拟生物进化的方法,通过对候选解进行评估和选择交叉、变异等操作,不断进化出更好的解。
粒子群算法则是模拟鸟群寻找食物的行为,通过个体之间的合作和信息共享来寻找最优解。
蚁群算法则是模拟蚂蚁找食物的行为,通过信息素的释放和感知来寻找路径。
这些基于搜索的机械臂轨迹规划算法可以在复杂环境中较好地解决运动规划问题,但是计算复杂度较高,需要更多的计算资源和时间。
四、机械臂避障算法研究机械臂避障算法主要是解决机械臂在运动过程中如何避开障碍物、规避碰撞的问题。
常用的机械臂避障算法有基于传感器的方法和基于视觉的方法。
机器人路径规划与避障算法优化研究
机器人路径规划与避障算法优化研究随着科技的不断发展和人工智能技术的不断突破,机器人在我们的生活中发挥着越来越重要的作用。
机器人的路径规划和避障算法是实现机器人智能化和自主性的关键。
本文将对机器人路径规划和避障算法进行研究与优化。
一、机器人路径规划算法机器人路径规划算法是指在给定地图和起终点位置的情况下,找到机器人最优路径的过程。
常见的机器人路径规划算法有Dijkstra算法、A*算法以及深度优先搜索算法等。
这些算法可以根据具体场景的需求进行选择和优化。
在实际应用中,机器人路径规划算法需要考虑到地图的复杂性、动态障碍物的变化以及机器人本身的运动能力。
因此,需要对算法进行优化,提高路径规划的效率和准确性。
二、机器人避障算法机器人避障算法是指机器人在运动过程中,通过感知和识别障碍物,并采取相应的措施来绕过障碍物的过程。
常见的机器人避障算法有基于传感器的障碍物检测、基于图像处理的避障算法以及基于深度学习的避障算法等。
在实际应用中,机器人避障算法需要考虑到环境的复杂性、障碍物的类型和形状以及机器人的感知能力。
因此,需要对算法进行优化,提高避障的效果和可靠性。
三、为了提高机器人路径规划与避障算法的性能和效果,研究者们进行了大量的优化研究。
下面列举了几种常见的优化方法:1. 混合路径规划算法:将多个路径规划算法进行整合,根据具体情况选择最优的路径规划方法。
例如,可以结合Dijkstra算法和A*算法,使得机器人在不同场景下选择最佳路径。
2. 动态避障算法:通过实时感知和分析环境中的障碍物信息,及时更新避障策略。
例如,利用激光雷达和摄像头等传感器获取周围环境信息,实时调整机器人的运动轨迹。
3. 强化学习算法:利用强化学习方法进行路径规划和避障算法的训练和优化。
通过与环境的交互,机器人可以逐步学习到最优的路径规划和避障策略。
4. 仿生学算法:借鉴生物系统中的优化原理,如蚁群算法和遗传算法等,对路径规划和避障算法进行改进和优化。
机械臂控制和路径规划算法
机械臂控制和路径规划算法机械臂是一种能够模拟人类手臂运动的机械装置,广泛应用于工业自动化、医疗手术等领域。
机械臂控制和路径规划算法是机械臂运动的核心技术,它们决定了机械臂的运动精度和效率。
本文将介绍机械臂控制和路径规划算法的基本原理和常见算法。
一、机械臂控制机械臂控制技术是指通过给定的输入信号控制机械臂的运动。
机械臂控制通常可以分为两个层次:关节空间控制和任务空间控制。
1. 关节空间控制关节空间控制是指在关节空间内对机械臂的每个关节进行控制。
在这种控制模式下,控制器通过计算每个关节的轨迹和速度来实现机械臂的运动。
关节空间控制常用的方法有PID控制、逆运动学控制等。
PID控制是一种常见的闭环控制方法,它通过比较实际输出与期望输出之间的差异来调整控制信号,使得系统能够快速、稳定地达到期望状态。
在机械臂的关节空间控制中,可以通过设置合适的PID参数来实现关节角度的精确控制。
逆运动学控制是一种基于机械臂几何模型和力学性质的控制方法。
通过逆向求解机械臂各关节的角度,可以使机械臂末端执行器(如夹爪)达到指定的位置和姿态。
逆运动学控制适用于需求较高的精确运动任务,如装配、焊接等。
2. 任务空间控制任务空间控制是指在笛卡尔空间内对机械臂末端执行器(如夹爪)进行控制。
在这种控制模式下,控制器通过计算末端执行器的位置和姿态来实现机械臂的运动。
任务空间控制常用的方法有运动学控制、动力学控制等。
运动学控制是通过建立机械臂的正运动学和逆运动学方程来计算末端执行器的位置和姿态。
在机械臂运动过程中,通过调整关节角度实现末端执行器的精确控制。
运动学控制适用于机械臂做精确路径规划和轨迹控制的应用场景。
动力学控制是在运动学控制的基础上考虑机械臂的动力学特性,通过求解机械臂的运动学和动力学方程来实现对末端执行器的控制。
动力学控制适用于对机械臂的力和力矩有较高要求的任务,如抓取和搬运重物等。
二、路径规划算法路径规划算法是指确定机械臂从起始位置移动到目标位置的轨迹或路径。
基于改进A^()算法的无人机避障路径规划
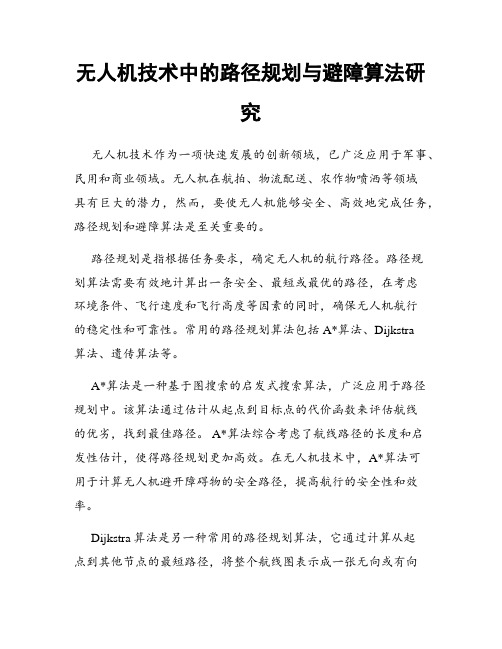
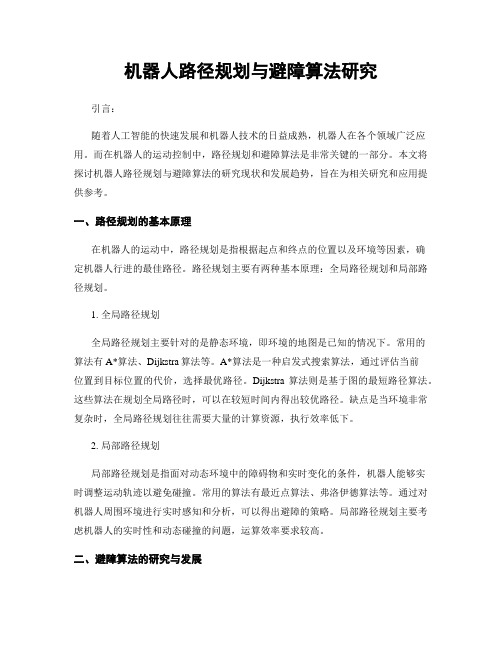
基于改进A*算法的无人机避障路径规划①李晓辉, 苗 苗, 冉保健, 赵 毅, 李 刚(长安大学 电子与控制工程学院, 西安 710064)通讯作者: 苗 苗, E-mail: ****************摘 要: 近年来, 物流行业的飞速发展, 运输是物流的重要环节之一, 根据数据显示, 运输的成本占据整个物流成本的50%以上. 无人机的使用有效的控制了运输成本, 合理规划物流无人机的飞行路线, 也起着至关重要的作用. 在物流无人机的航迹规划中, 必须保证无人机飞行过程中能够准确避开禁飞区. 本文基于A*算法, 结合多种类型的禁飞区, 设计出一种改进算法, 能够找到任意两客户点间无人机避障飞行的最优路线. 仿真结果表明, 本文所设计的算法能够有效解决多类型禁飞区并存的无人机避障路径规划问题.关键词: 无人机; 路径规划; 避障; A*算法引用格式: 李晓辉,苗苗,冉保健,赵毅,李刚.基于改进A*算法的无人机避障路径规划.计算机系统应用,2021,30(2):255–259. /1003-3254/7772.htmlObstacle Avoidance Path Planning for UAV Based on Improved A* AlgorithmLI Xiao-Hui, MIAO Miao, RAN Biao-Jian, ZHAO Yi, LI GANG(School of Electronics and Control Engineering, Chang’an University, Xi’an 710064, China)Abstract : In recent years, transportation has been playing an important role in blooming logistics. Indeed, transportation accounts for more than 50% of the whole logistics cost. Express UAVs could effectively reduce the cost. Moreover,proper path-planning of UAV is also essential. Particularly, UAV should accurately avoid non-fly zones during flight. In this study, the obstacle avoidance path planning of UAVs is comprehensively discussed. With the improved A* algorithm and considering various obstacles, we propose a method that can find the optimal obstacle avoidance path between any two customer points. The simulation results prove the effectiveness of solving the obstacle avoidance path planning problem for express UAVs.Key words : UAV; path planning; obstacle avoidance; A* algorithm无人机作为我国科技创新的重要产业, 正处于井喷式发展时期. 它的技术日渐成熟, 能够执行复杂的危险任务. 多用于军事侦查、电力巡检、货物运输、物流配送等, 在航空领域占有一席之地. 随着自动控制技术、传感技术、导航技术、实时监控技术、计算机技术的飞速发展, 无人机的功能也越来越完善, 应用领域不断扩大. 因此, 研究无人机路径规划问题有着重要意义[1,2]. 我国物流运输行业迅猛发展, 已经成为我国国民生产的重要组成部分, 与人们的生活密切相关. 而随着市场需求的增大, 配送成本也在不断升高. 合理有效的运输方案, 可以帮助企业降低运输成本, 提高运输质量,同时还能实现节能减排的环保目标[3]. 无人机因其高效、灵活、低成本的特点, 渐渐成为各大物流公司的宠儿. 无人机本身是科技的产物, 应该合理正确的使用,计算机系统应用 ISSN 1003-3254, CODEN CSAOBNE-mail: ************.cn Computer Systems & Applications,2021,30(2):255−259 [doi: 10.15888/ki.csa.007772] ©中国科学院软件研究所版权所有.Tel: +86-10-62661041① 基金项目: 陕西省科技厅重点产业创新链项目(2020ZDLGY-09-03, 2019ZDLGY03-01); 西安市科技项目(201805045YD23CG29)Foundation item: Key Industry Innovation Chain Project of Science and Technology Bureau, Shaanxi Province (2020ZDLGY-09-03, 2019ZDLGY03-01);Science and Technology Program of Xi’an Municipality (201805045YD23CG29)收稿时间: 2020-06-14; 修改时间: 2020-07-10; 采用时间: 2020-07-17; csa 在线出版时间: 2021-01-27不应该再出现无人机碰撞飞机、使用无人机偷窥等负面新闻, 这些都是十分危险的行为. 再加上我国严格的航空管制, 设置禁飞区显得十分有必要. 因此, 无人机路径规划问题的研究常常与禁飞区避障问题相结合.路径规划问题一直是国内外学者研究的热点, 无人机的路径规划问题最初是由旅行商问题(Traveling Salesman Problem, TSP)[4]和车辆路径问题(Vehicle Routing Problem, VRP)[3]衍变而来. 无人机避障路径规划问题分为二维和三维两种情况. 本文主要研究二维平面的路径规划问题. 目前大多数的二维平面路径规划问题中, 禁飞区的类型都只是单一的, 比如只存在多边形障碍物[2], 或者只存在圆形障碍物[5,6]. 文献[2]提出了一种改进的A*算法来规划无人机路线, 但只针对单一的矩形禁飞区. 文献[5]提出顺序凸规划问题逼近非凸零件的算法来规划无人机航线, 是只针对圆形禁飞区设计的. 文献[6]将融合简化稀疏A*算法与模拟退火算法相结合, 规划出了一条代价较低的航迹, 但禁飞区的类型也是单一的圆形. 本文研究的是多类型禁飞区共存的情况, 即同时包含有圆形、多边形障碍物,航迹也可以贴着禁飞区的某条边飞行, 这大大提高了算法设计的难度. 这类问题最常用到的算法包括模拟退火算法[6]、改进的粒子群优化算法(Particle Swarm Optimization)[7]、蚁群算法(Ant Colony Algorithm)、几何法[8]等. 文献[6]提出了将A*算法与模拟退火算法相结合来解决无人机避障的路径规划问题, 能够利用较少内存, 快速的得到一条综合代价较低且较为平滑的航迹. 文献[7]提出了一种改进的粒子群算法来规划无人机航向路线, 相比较传统的粒子群算法, 改进后的算法适应性更强, 环境规划策略更加灵活, 但是集中式计算负担过大, 有时不能满足需要. 文献[8]提出了一种基于几何法的路径规划方法, 在航迹部分加入了螺旋线航迹. 本文采用的是改进后的A*算法来解决多类型禁飞区下无人机路径规划的问题.1 问题描述本文研究的问题是通过算法找出无人机从任意起点到任意终点运输代价最小的安全避障路线. 假设某指定区域内有多个不同类型的禁飞区, 假设物流无人机均为充电旋翼式无人机, 对货物载重、航行时间、电池能耗等有约束限制. 为了确保货物能够安全准时运输至指定客户点, 需要对无人机进行路径规划. 本文假设仅对物流无人机航行阶段路径进行规划, 则无人机的运动可简化为二维平面运动.无人机路径规划需要满足以下原则:① 无人机飞行起始点记为S, 终止点记为T.② 任务规划应该得到一条从任务起点到任务终点的路径.③ 要在无人机避过禁飞区的同时, 保证规划的路径应尽量最优化, 满足无人机航程最短的要求.无人机路径规划的实现主要包括两个步骤: (1) 环境建模. 根据无人机所在的实际环境, 在仿真系统中建立合适的模型, 将实际的物理空间抽象成能用数学模型求解的虚拟空间. (2)路径搜索[9]. 根据任务条件规划出一条从任意起点S到任意终点T的任务路线, 在满足任务条件约束、满足避障要求的同时使路径代价达到最短.本文想要实现的目标是: 无人机能在准确避过多类型障碍物的同时, 最小化航行里程.2 算法设计A*算法是一种静态路网中求解最短路径最有效的直接搜索算法, 它通过启发函数来引导算法的搜索方向. 针对本文研究的问题, 对A*算法做了一定的改进.首先输入无人机飞行起始点S, 终止点T. 建立两个数组C1、C2, 用来存放无人机所经过节点的信息.上式中, f i表示起点S到节点i的有效已走距离, 这里的有效已走距离是指已经顺利避过障碍物的路线距离;g i表示节点i到终止点T的直线距离, 这里的直线距离是指不考虑障碍物时节点i到终止点T的直线距离,即剩余最小距离, 这是一个最小估算值. D i是f i与g i的和, 表示节点i目前的最小总代价值.算法重要步骤:Step 1. 输入起始点和终止点的坐标, 将起点存入C1中.Step 2. 遍历C1, 找到最小值D min对应的节点对它进行展开, 即找到距离该节点最近的障碍物, 获取该障碍物的节点信息, 将该障碍物的可用节点添加到C1中, 并把C1中已展开的点移至C2中.Step 3. 重复Step 2, 直到当前展开点与终点连线不再经过任何障碍物, 可直接到达终点时停止, 或者直到C1为空时停止循环.计算机系统应用2021 年 第 30 卷 第 2 期Step 4. 对得到的最优路径再次检查修复.Step 4是对路径的修复, 如图1所示, 假设我们已经找到S到T点的最优路径, 图中可以看出S点到V4点的连线不穿过禁飞区, 可以直达, 这种情况下就可以删除S到V4之间的多余节点; 而S到V6点之间的连线穿过了禁飞区, 则不可修复. 为了最终结果更加完美, 代码中对每个节点都进行了检测, 测试它们到其他节点是否可直达, 若可达则删除多余节点来修复路径[10].禁飞区TV7V6V5V4V3V2V1S图1 路径修复图重点算法部分的伪代码见算法1和算法2.算法1. 重点算法输入: 起点S坐标, 终点T的坐标, 障碍物信息输出: 最优解best_solution//C1, C2保存点的信息, 包括每个点的f值、g值、坐标、上层节点读取障碍物点信息, 起始点信息;设best_solution的初始f值为inf;判断S→T是否闯过障碍物, 不穿过障碍物可直接返回;若穿过障碍物, 则将S加入到C1中, 进入while循环;While 停止机制: 当前迭代的节点与终点T连线不再穿过任何障碍物, 或者C1为空 找C1中找到min(f+g)对应的节点minPoint, 对它展开; 找到距离minPoint最近的障碍物的顶点信息(若是圆形障碍物,找左右两个切点); If 顶点信息输出为空(即已经不穿过任何障碍物) 更新best_solution, 跳出循环; else 继续寻找 更新best_solution; 更新C1 (删去C1中已展开的点, 加入最近障碍物顶点); end修复best_solution中的路线(具体代码见算法2);画出路线;结束.算法2. 修复部分算法输入: best_solution输出: new_best_solution//num表示最优解best_solution中所经过节点的个数for i=1,2,…, num–2 for j=i+2,i+3,…, num–1 判断best_solution中第i个点到第j个点的连线是否闯过障碍物; if 没有穿过障碍物 将点i和点j间所有的多余节点删去; end endend更新best_solution中的路线即最终距离;new_best_solution=best_solution;结束.举例说明:假设现有多边形障碍物3个, 圆形障碍物3个. 如图2所示, 起始点为S, 终止点为T, 创建C1、C2, 它们保存的节点信息包括: f值、g值、节点坐标、上层节点坐标. 从起始点S出发, 将S保存到C1中, 遍历C1,找到D min对应的节点S, 对S展开, 找到距离S最近的障碍物节点P4、P5、P6, 将P4、P5、P6中可用的节点添加到元胞数组C1中, 并将C1中已展开的点S移动到C2中; 再次遍历C1, 找到D min所对应的节点P6, 再继续寻找距离P6点最近的障碍物, 并将该障碍物的可用节点信息存入C1中, 这里注意, 当找到的距离P6点最近的障碍物是圆形时, 求P6与终点T之间的左右两条切线, 将可用切点当作备选点存入C1中; 再次遍历重复上述步骤, 直到当前展开点与终点T的连线不再穿过任何障碍物时, 就可得出S到T的最优路径.寻优的结果是要经过多次循环产生的, 图3完整的复现了这一过程, 图中数值表示的是由公式1得出的D值. 算法中的每次循环都要遍历C1, 找出最小值D min对应的节点, 继续往下分支. 图3中P12下的分支3B表示节点P12和终点T关于圆形障碍物3所做切线得出的切点, P11下的分支表示节点P11和终点T关于圆形障碍物3所做切线得出的切点1和切点2. 这里注意, 可用切点不一定都能找到两个, 有的切点严重偏离当前圆形障碍物时, 就属于不可用切点, 不予以考虑.图3中可以看出障碍物点P4、P5、P6多次出现, 但它们对应的上层节点有所不同, 所以它们的f值、对应的D值也都不相同, 代表着各自的意义. 图中有向下箭头分支的节点表示在某次循环中已经被展开过的点,这类点要及时移动到C2中.2021 年 第 30 卷 第 2 期计算机系统应用4080120160ST P 4P 5P 6P 3P 11P 12P 1P 2P 9P 10P 8P 7P 14P 水平距离 (km)图2 路径规划图ST3B 3B 23B 1P 12P 6P 6P 4P 5P 5P 6P 4P 5P 13P 14P 11183.5756185.4997194.9760198.5771312.3042195.0402195.0405192.6083198.5609189.2268185.4532197.6992187.2003190.7251196.6939196.5344197.7200图3 路径分支图3 仿真分析我们对改进的A*算法进行仿真实验, 对实验结果进行了分析. 实验中用到的PC 系统为Windows10, 处理器型号为Intel(R) Core(TM) i7-8700, 主频率为3.19 GHZ, 开发环境为Matlab 2016b, 仿真实验过程通过Matlab 编程语言实现, 使用Matlab 对规划环境及规划出的航迹进行作图. 实验中的环境模型大小为800 km×900 km, 同时包含了多种类型的禁飞区, 共14个禁飞区, 其中6个圆形禁飞区, 8个多边形禁飞区.通过仿真实验, 模拟了4条路径, 如图4所示, 每条路线的途径点信息如表1所示. 可以清楚的看到我们设计的最优路线允许贴着禁飞区的边飞行, 我们的算法也能解决多种形状并存的壁障问题.200400600800T 4S 2S 4S 1S 3T 3T 2P 14P 15P 11P 12P 10P 18P 19P 22P 23P 24P 21P 29P 31P30P 6P 5P 26P 27P 25P 28P 32P 20P 17T 1P 13P 16P 2P 7P 8P 9P 4P 34P 33P 36P37P 38P 1P 3P 35水平距离 (km)图4 路径规划图表1 最优路径信息路径序号途经点信息代价大小(km)S1(850,220)→T1(200,715)(719.715 8,232.602 7)→(430,565)→(261.063 9,619.518 3)862.844 6S2(70,120)→T2(650,685)(217.648 2,350.453 1)→(430,445)→(640,630)842.695 0S3(770,650)→T2(315,68)(705.941 2, 635.586 8)→(554.636 6,518.215 3)→(349.650 8,172.930 1)769.203 9S4(470,65)→T4(37,736)(452.076 7,172.029 8)→(335.938 0,343.773 0)→(185,550)→(50,640)830.533 74 结束语本文改进了A*算法, 解决了圆形、多边形禁飞区共存情况下的避障路径规划问题, 对比只有单一类型禁飞区的问题有一定的实用性, 得到的路线更接近最优. 但也有一些不足之处, 比如没有应对突发威胁时的实时航迹规划手段. 本文仅讨论无人机避障路径规划的问题, 后续会对综合的多仓库、多约束条件下的物流无人机路径规划问题进行研究, 在算法自主实时性方面寻求突破, 完善无人机航迹规划策略.参考文献Goodchild A, Toy J. Delivery by drone: An evaluation of1计算机系统应用2021 年 第 30 卷 第 2 期unmanned aerial vehicle technology in reducing CO 2emissions in the delivery service industry. Transportation Research Part D: Transport and Environment, 2018, 61:58–67. [doi: 10.1016/j.trd.2017.02.017]许卫卫, 张启钱, 邹依原, 等. 改进A*算法的物流无人机运输路径规划. 华东交通大学学报, 2019, 36(6): 39–46.2刘霞. 车辆路径问题的研究[博士学位论文]. 武汉: 华中科技大学, 2007.3Dimitrijević V, Šarić Z. An efficient transformation of thegeneralized traveling salesman problem into the traveling salesman problem on digraphs. Information Sciences: An International Journal, 1997, 102(1–4): 105–110. [doi: 10.1016/S0020-0255(96)00084-9]4Zhang Z, Li JX, Wang J. Sequential convex programming fornonlinear optimal control problems in UAV path planning.5Aerospace Science and Technology, 2018, 76: 280–290.[doi: 10.1016/j.ast.2018.01.040]杨玉, 金敏, 鲁华祥. 融合简化稀疏A*算法与模拟退火算法的无人机航迹规划. 计算机系统应用, 2019, 28(4): 25–31. [doi: 10.15888/ki.csa.006864]6熊华捷, 蔚保国, 何成龙. 基于改进粒子群算法的UAV 航迹规划方法. 计算机测量与控制, 2020, 28(2): 144–147.7常波, 王瑞. 基于几何法的无人机航迹规划. 计算机系统应用, 2015, 24(1): 109–113. [doi: 10.3969/j.issn.1003-3254.2015.01.019]8田景凡, 王彦恺. 基于弹性绳算法的无人机路径规划方法.军民两用技术与产品, 2019, (8): 59–63.9成浩浩, 杨森, 齐晓慧. 面向城市环境的四旋翼无人机在线避障航迹规划方法. 计算机科学, 2019, 46(4): 241–246.[doi: 10.11896/j.issn.1002-137X.2019.04.038]102021 年 第 30 卷 第 2 期计算机系统应用。
移动机器人路径规划与避障算法实现与优化
移动机器人路径规划与避障算法实现与优化移动机器人在各个领域的广泛应用,使得路径规划与避障算法成为了研究的热点之一。
在实现机器人的自主导航过程中,路径规划算法起着至关重要的作用。
它能够帮助机器人找到最优的路径,并且避免与环境中的障碍物发生碰撞。
本文将介绍一种基于传感器的移动机器人路径规划与避障算法,并对其进行进一步优化。
路径规划是指机器人从起始点到目标点的过程,通过选择合适的路径来达到目标。
在传感器技术的支持下,移动机器人可以利用环境信息来进行路径规划。
其中,激光或摄像头等传感器可以帮助机器人获取环境中的障碍物信息。
在路径规划的算法中,最著名的方法是A*算法。
它是一种启发式搜索算法,通过评估每个可能的路径,并选择最短路径来达到目标。
A*算法的核心思想是综合考虑从起点到当前点的实际代价以及从当前点到目标点的估计代价,使得机器人能够找到一个最优的路径。
在路径规划的基础上,避障算法是保证机器人行动安全的关键。
避障算法通过避免机器人与障碍物之间的碰撞,确保机器人能够稳定地移动。
针对移动机器人避障问题,常用的算法有动态窗口法、势能法、梯度法等。
动态窗口法通过评估机器人在不同速度和方向下的安全性,选择最佳行动。
势能法将机器人和障碍物当作带电荷的粒子,在静电作用下,机器人将从高电势区域移动到低电势区域,从而避免与障碍物碰撞。
梯度法则根据环境中的梯度信息,将机器人引导到目标点,避开障碍物。
然而,在实际应用中,以上算法仍然存在一些问题。
首先,机器人在高速运动中,需要实时收集和处理大量的传感器数据,这对计算能力和传感器响应速度提出了很高的要求。
其次,当环境复杂多变时,传统的路径规划与避障算法可能会得到次优的结果,导致机器人无法选择最短路径或者无法有效避开障碍物。
因此,对路径规划与避障算法进行优化成为了当前研究的重点之一。
针对以上问题,一种有效的优化方法是深度学习算法的引入。
深度学习具有强大的学习和泛化能力,可以通过训练机器人感知环境并做出决策的能力。
一种基于遗传算法的空间机械臂避障轨迹规划方法_祁若龙

x1z1 x2y2 z2 y1
l1 y0 z0 x0
l2
x3 zy33 l3
x4 y4
x5 z4
zx5y65
y6
z6 l4
图 1 空间机械臂示意图 Fig.1 Sketch map of space manipulator
第 36 卷第 3 期 2014 年 5 月 DOI:10.3724/SP.J.1218.2014.00263
机器人 ROBOT
Vol.36, No.3 May, 2014
一种基于遗传算法的空间机械臂避障轨迹规划方法
祁若龙 1,2 ,周维佳 1 ,王铁军 1
(1. 中国科学院沈阳自动化研究所机器人学国家重点实验室,辽宁 沈阳 110016; 2. 中国科学院大学,北京 100049)
间和碰撞情况的遗传算法适应度评定函数. 最后应用遗传算法在关节空间下规划出一条无碰撞、 动力学特性满足
裕度要求、 轨迹长度和运动时间较短的理想轨迹.另外,上述方法具有拓展机械臂避开非常复杂的障碍.利用该方法在通过 C 语言建立的空间机械臂仿真平台上进行验证,结果表明
确定的中间点相关参数提取出来作为待定参数,从而将空间机械臂轨迹规划问题转变为一个多目标优化求解问题;
其次应用遗传算法进行求解,在分析空间机械臂控制需求和障碍的笛卡儿空间描述的基础上,通过加权系数法建
机器人导航系统中的路径规划与避障策略优化
机器人导航系统中的路径规划与避障策略优化在机器人导航系统中,路径规划和避障策略的优化是至关重要的。
路径规划涉及确定机器人在给定环境中的最佳路径,而避障策略则是为了确保机器人在遇到障碍物时能够安全绕过障碍物。
本文将讨论机器人导航系统中路径规划和避障策略的优化方法和挑战。
路径规划是机器人导航系统中的一个关键问题,它的目标是找到机器人从当前位置到目标位置的最优路径。
最常用的路径规划算法是A*算法,它利用启发式函数来估计从当前位置到目标位置的代价,并根据这个估计选择下一步的行动。
A*算法具有高效的计算速度和较好的路径质量,因此被广泛应用于导航系统中。
然而,在某些情况下,A*算法可能会在处理大规模或复杂的环境时出现性能问题。
这是因为A*算法需要维护一个开放列表和一个关闭列表来存储已经访问过的节点,而这两个列表的大小会随着环境的增大而增加。
为了解决这个问题,研究人员提出了一些优化策略。
一种常见的优化策略是使用空间分解技术,将环境分解为多个小区域,每个区域只与其邻近区域相连。
这样,可以更加高效地搜索最优路径,因为机器人可以通过局部搜索来避免搜索整个环境。
另外,还可以使用网格方法来将环境表示为一个二维矩阵,其中每个单元格表示一个离散的位置。
在避障策略方面,机器人需要能够在导航过程中及时检测和避免障碍物。
传统的避障方法包括使用传感器来检测周围环境,并利用反射定位系统(SLAM)来构建环境地图。
然后,机器人可以使用这些地图来规划避障路径。
然而,传统的避障方法往往存在一些问题。
首先,传感器可能会受到噪声或故障的影响,导致障碍物的检测不准确。
其次,使用SLAM技术构建地图需要额外的计算资源。
因此,研究人员提出了一些优化策略来改善避障性能。
一种常见的优化策略是使用激光雷达传感器进行环境感知。
激光雷达可以提供高精度的距离和方向信息,从而准确地检测障碍物。
此外,激光雷达还可以提供连续的数据流,使机器人能够更加及时地避开障碍物。
机器人的路径规划和避障算法
机器人的路径规划和避障算法随着科技的不断进步和发展,人们对机器人的依赖度也越来越高。
机器人的应用领域也越来越广泛,从工业生产到家庭服务,从医疗护理到助力行动,无所不包。
而对于机器人来说,路线规划和避障算法是至关重要的一部分,它们能够决定机器人的行动轨迹,保证机器人的运转效率和安全性。
一、机器人路径规划机器人在实际运作中,需要根据任务或者需求规划出一条合理的路径,以便在任务执行中达到舒适度和效率的最优化。
机器人路径规划的主要任务,就是要求根据机器人自身的姿态、传感器信息、局部地图,以及各类未知环境因素,综合而成的一种路径规划算法。
1. 基于全局路径的规划方法全局路径规划方法根据预设的全局目标,分析其所在区域内的各种信息,通过建立或搜索可行走路径,得到全局路径。
这种方法可以保证机器人快速、高效的到达目标地点,缺点是该算法的全局路径一般无法考虑到周边动态环境的影响因素,需要基于预设的固定环境参数进行决策。
常见的全局路径规划方法包括A*算法、D*算法等。
2. 基于局部路径的规划方法局部路径规划方法根据机器人所在局部环境的实时信息,依靠局部规划模型构建出一条可行路径,以完成机器人在局部环境内的导航和控制。
该方法可以实现灵活、快速的路径调整,因为它依靠机器人传感器获得的信息,可以自主地探测障碍物的变化,及时做出路径调整。
常见的局部路径规划方法包括障碍物避难规划、人机协同导航规划等。
二、机器人避障算法机器人在运动过程中会遇到各种各样的障碍物,如墙壁、柱子、植物、人等,如果没有有效的避障措施,机器人就有可能会撞上障碍物,导致机器损毁或者任务失败。
因此对机器人进行避障算法研究是十分必要的。
1. 静态避障算法静态障碍物指的是位置不会变化的障碍物,这些障碍物的空间坐标可以预先映射到一个静态地图上,机器人可以利用静态地图的信息进行避障。
静态避障算法主要通过建立地图模型来实现对障碍物的探测和避免,常见的静态避障算法包括代价地图法、虚拟障碍物法等。
机器人导航中的路径规划与障碍避免策略
机器人导航中的路径规划与障碍避免策略在机器人技术领域,路径规划与障碍避免是实现自主导航和避免碰撞的关键任务。
机器人导航中的路径规划涉及到如何选择最佳路径从起点到终点,而障碍避免则是在移动过程中如何避开障碍物。
这两个任务的准确执行对于机器人的安全性、效率和性能至关重要。
路径规划是通过在环境中搜索最佳路径的过程,其目标是找到最短路径或最优路径以满足特定的约束条件。
在机器人导航中,路径规划常常使用图论算法,如Dijkstra算法、A*算法和D*算法等。
这些算法根据特定的启发式函数评估路径的成本,并根据最小化成本选择路径。
Dijkstra算法是一种广度优先搜索算法,它以节点到节点的距离作为路径成本的度量。
该算法通过计算从起点到每个节点的最短路径来确定最佳路径。
然而,由于Dijkstra算法需要考虑所有节点,因此在实时路径规划中可能不适用。
A*算法是一种启发式搜索算法,它使用估计值来评估节点到目标的距离。
A*算法通过综合考虑路径成本和启发式估计值选择最佳路径。
这使得A*算法在路径规划中更高效,并且在动态环境下可以处理。
D*算法是一种增量路径规划算法,它可以在动态环境中实时计算最佳路径。
该算法通过不断更新路径信息来适应环境的变化,从而避免全局重新规划的需求。
D*算法在机器人实时导航中具有很大的应用潜力。
在路径规划的过程中,机器人需要考虑到环境中的障碍物,并采取相应的避障策略。
障碍避免算法有多种不同的方法,如感知与避让、速度调整和动态规划等。
感知与避让是一种基于传感器数据的障碍避免策略。
机器人通过感知周围环境中的障碍物,如墙壁、家具和其他障碍物,并避开它们。
这种策略的关键是准确感知和识别障碍物,并调整路径以绕开障碍物。
速度调整是一种基于速度控制的障碍避免策略。
机器人根据障碍物的距离和速度来调整自身的速度,以避免与障碍物发生碰撞。
该策略的关键是准确判断障碍物的速度和距离,并进行实时的速度调整。
动态规划是一种基于环境模型的障碍避免策略。
一种基于遗传算法的空间机械臂避障轨迹规划方法_祁若龙

An Obstacle Avoidance Trajectory Planning Scheme for Space Manipulators Based on Genetic Algorithm
QI Ruolong ,ZHOU Weijia ,WANG Tiejun
(1. The State Key Laboratory of Robotics, Shenyang Institute of Automation, Chinese Academy of Sciences, Shenyang 110016, China; 2. University of Chinese Academy of Sciences, Beijing 100049, China)
机器人
ROBOT
Vol.36, No.3 May, 2014
一种基于遗传算法的空间机械臂避障轨迹规划方法
祁若龙 1,2 ,周维佳 1 ,王铁军 1
(1. 中国科学院沈阳自动化研究所机器人学国家重点实验室,辽宁 沈阳 110016; 2. 中国科学院大学,北京 100049)
摘 要:针对空间机械臂系统的一系列特殊需求,提出了一种空间机械臂轨迹规划方法.假设机械臂在关节 空间下存在一条可以用两段高次样条曲线分段描述、满足所有空间机械臂运动特性要求的理想轨迹.这两段样条 轨迹之间的连接点参数能够影响两段样条函数在空间中的扭曲形状,从而使机械臂在遵从样条轨迹运动的同时避 开所有障碍.首先建立理想轨迹的分段描述方程,将方程中的未知量用与中间点有关的参数进行描述,将不能够 确定的中间点相关参数提取出来作为待定参数,从而将空间机械臂轨迹规划问题转变为一个多目标优化求解问题; 其次应用遗传算法进行求解,在分析空间机械臂控制需求和障碍的笛卡儿空间描述的基础上,通过加权系数法建 立关于笛卡儿空间机械臂末端轨迹长度、关节空间机械臂运动角度、运动过程中关节最大扭矩、机械臂总运动时 间和碰撞情况的遗传算法适应度评定函数.最后应用遗传算法在关节空间下规划出一条无碰撞、动力学特性满足 裕度要求、 轨迹长度和运动时间较短的理想轨迹.另外,上述方法具有拓展性,通过多次分解轨迹求取中间点, 能够使机械臂避开非常复杂的障碍.利用该方法在通过 C 语言建立的空间机械臂仿真平台上进行验证,结果表明 该方法稳定、有效,生成的轨迹满足空间机械臂的性能要求. 关键词:机械臂;避障;轨迹优化;遗传算法 中图分类号:TP24 文献标识码:A 文章编号:1002-0446(2014)-03-0263-08
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
机 械 工 程 学 报JOURNAL OF MECHANICAL ENGINEERING 第46卷第13期2010年7月Vol.46 No.13 Jul. 2010DOI :10.3901/JME.2010.13.109基于A *算法的空间机械臂避障路径规划*贾庆轩 陈 钢 孙汉旭 郑双奇(北京邮电大学自动化学院 北京 100876)摘要:针对空间机械臂在轨操作任务需求,提出一种基于A*算法的避障路径规划算法。
根据机械臂和障碍物几何特征,对机械臂模型和障碍模型进行简化。
通过研究机械臂本身所固有的几何特性,根据障碍物的位姿坐标,分析机械臂各杆件与障碍物发生碰撞的条件,进而求解空间机械臂的无碰撞自由工作空间。
在此基础上,利用A*算法在空间机械臂的自由工作空间进行无碰撞路径搜索,实现了空间机械臂的避障路径规划。
通过仿真试验验证了基于A*算法的空间机械臂避障路径规划算法的有效性与可行性。
关键词:空间机械臂 避障路径规划 A*算法 中图分类号:TP242Path Planning for Space Manipulator to Avoid ObstacleBased on A * AlgorithmJIA Qingxuan CHEN Gang SUN Hanxu ZHENG Shuangqi(Automation School , Beijing University of Posts and Telecommunications, Beijing 100876)Abstract :A novel path planning method to avoid obstacle based on A* algorithm is presented for space manipulator to accomplish the in-orbit mission. According to the geometric characteristics of manipulator and obstacle, the manipulator model and obstacle model are simplified. On the basis of the inherent geometric characteristic of manipulator, and according to the position and orientation coordinates of obstacle, the collision conditions of all links of manipulator are analyzed. And then, the collision-free workspace of space manipulator is obtained. On this basis, the collision-free path search in the free workspace of space manipulator is carried out by using A* algorithm, thereby, the obstacle avoidance path planning is achieved. The effectiveness and feasibility of the proposed path planning algorithm based on A* algorithm for space manipulator to avoid obstacle are verified by simulation and experiment.Key words :Space manipulator Obstacle avoidance path planning A* algorithm0 前言随着空间探索的不断深入,空间机械臂应用技术已经成为空间技术的重要研究方向。
空间机械臂代替宇航员完成空间作业任务,如组装与搭建空间站、释放与回收卫星、维护空间设备以及完成空间科学试验等,大大减小了宇航员舱外作业的风险,因此空间机械臂应用技术受到国内外专家的高度重视。
在微重力环境下,空间机械臂系统处于自由漂* 国家高技术研究发展计划资助项目(863计划,2009AA7041007)。
20100324收到初稿,20100504收到修改稿浮状态,使得机械臂控制变量与非独立变量之间存在强烈的运动耦合,运动控制难度加大,从而空间机械臂的路径规划变得特别复杂[1]。
此外,由于空间环境中的空间碎片,空间舱体外设试验装置等都有可能成为空间机械臂在轨操作过程中的障碍,因此为了顺利完成在轨操作任务,开展空间机械臂避障路径规划研究十分重要。
避障路径规划是指在给定的障碍条件以及起始和目标的位姿,选择一条从起始点到达目标点的路径,使运动物体能安全、无碰撞地通过所有的障碍[2]。
目前,针对机械臂避障路径规划提出了许多方法,其中最为典型的包括基于自由空间法和人工机械工程学报第46卷第13期110势场法两种。
LOZANO-PEREZ[3-4]提出了基于C空间的自由空间法。
首先以机械臂的关节坐标系建立C空间,将障碍物映射到C空间,形成空间构型障碍,从而求得C空间的补集,即自由空间。
在此基础上,利用启发式搜索算法在机械臂的自由空间内寻找机械臂的运动路径。
该方法虽然能够实现机械臂无碰撞路径规划,但是由于将障碍物映射到C空间方法较为复杂,对于复杂环境难以满足实时性的要求。
KHABIT[5]对障碍定义一个排斥势场,目标点处定义一个吸引势场,机械臂的运动由两个势场共同作用力来决定,由此来保证机械臂在避障的同时顺利到达最终目标点。
该方法对于处理全局路径规划中的动态避障非常有效,但容易陷入局部最小点处。
FIORINI等[6]提出了基于速度的C空间法,该方法能够实现机器人移动障碍物环境中的避障,但该法只适用于移动机器人的避障路径规划。
李大生等[7]利用系统内能方法推导了机械臂无碰运动规划的系列公式,提出了基于动力学约束的机器人无碰路径规划方法,但由于该方法涉及动力学计算的推导,对于6自由度空间机械臂采用该方法太过复杂。
目前,国外针对空间机械臂避障路径规划算法的研究主要集中于国际空间站的冗余度机械臂。
SAKATA等[8]基于梯度投影法提出了一种空间冗余度机械臂的避障路径规划算法,该方法主要利用冗余度机械臂自运动的特点实现其实时的避障路径规划,不适用于非冗余机械臂。
SHAFFER等[9]提出了基于八叉树空间机械臂的避障路径规划算法,该方法需要预先构建空间机械臂整个工作空间的八叉树模型,在此基础上实现空间机械臂的实时避障路径规划,因此机械臂工作空间中的物体位置的改变和空间漂浮物的漂移都需重新构建机械臂的工作空间的模型。
本文针对具体的空间机械臂构型,首先对空间机械臂的模型和障碍物模型进行合理的简化;在此基础上,将笛卡尔空间障碍物映射到关节空间,进而求得机械臂的自由运动空间;利用A*启发式搜索算法在机械臂的自由空间内进行了路径搜索;最后,通过仿真试验对本文提出的空间机械臂避障路径规划算法进行了验证。
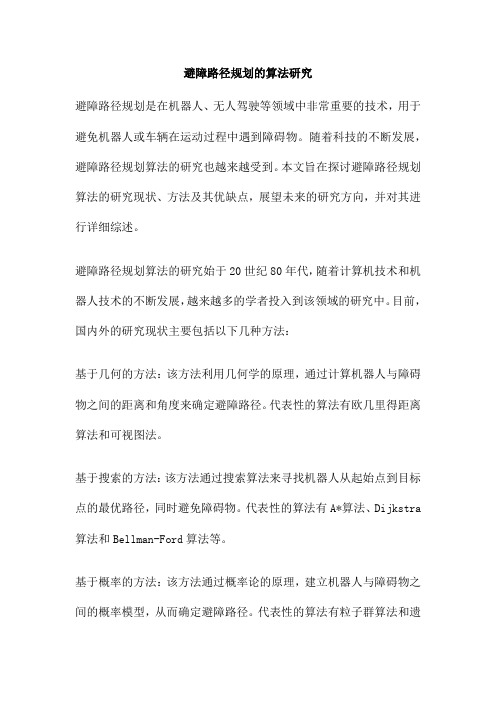
1 碰撞模型1.1 空间机械臂模型本文研究的机械臂为6自由度空间机械臂,其具体的构型D-H坐标系与参数分别如图1和下表所示。
机械臂杆件均为圆柱体,因此机械臂杆件碰撞模型采用圆柱模型,且其半径均为0.15 m。
图1 机械臂D-H参数坐标系图表机械臂D-H参数表序号关节角/iθ(°)扭角/iα(°)连杆长度/mia连杆偏置/mid1 1θ(90) –90 0 0.52 2θ(0) 0 2.5 0.33 3θ(0) 0 3.0 –0.34 4θ(0) 90 0 05 5θ(–90) –90 0 0.36 6θ(0) 0 0 0.6 1.2障碍模型三维障碍物一般具有不规则的几何形状,因此本文利用障碍物的规则体包络来近似建模,这种建模方法虽然在一定程度上扩大了障碍域,但是使障碍域大大简化,有效地提高了规划的效率,同时也使得整个机械臂避碰路径规划更具有安全性。
障碍物可以采用球形包络描述为(,)SS P r,如图2所示。
其中,0000(,,)P x y z为球心在基坐标系中的坐标,Sr为球的半径,这种障碍物的球形包络近似的求取方法,大大简化了计算,方法简单直观。
图2 障碍物的球形包络几何模型2010年7月贾庆轩等:基于A*算法的空间机械臂避障路径规划1112 笛卡尔空间障碍向构型空间的转化本文首先根据机械臂模型和障碍物模型将笛卡尔空间障碍通过几何关系向机械臂的构型空间进行转化,从而形成机械臂的自由运动空间,为利用A*算法进行机械臂的无碰撞路径规划提供条件。
2.1问题的提出空间机械臂在轨操作过程中,机械臂的运动会导致基座随之运动,因此空间机械臂的避障运动规划不仅与障碍物有关而且与基座的运动控制紧密结合。
由于机械臂安装于基座上,当障碍物也固定于基座时,障碍物与机械臂安装位置间的相对位姿关系在整个机械臂运动过程中保持不变。
此时,可以采用相对于基座坐标系的方式进行规划,障碍物向构型空间的转化只需要求解一次即可得出整个运动过程中机械臂的自由运动空间。
当障碍物独立于基座时,机械臂的运动会导致障碍物相对于机械臂的安装位置发生运动,此时,需要采用相对于惯性坐标系的方式进行路径规划,因此每个控制周期都需要将障碍物向构型空间的转化,从而得出该控制周期机械臂的自由运动空间。
为了便于分析和着重阐明本文提出的避障路径规划算法,本文以下均针对障碍物固定于空间飞行器基座的情况进行讨论,障碍物独立于基座的情况只是需要多次求解机械臂的自由运动空间,其求解方法与障碍物固定于基座模式相同。
以下着重阐明求解机械臂自由运动空间方法。
2.2总体思路本文研究对象为6自由度机械臂,其具有6个关节,每个关节角的旋转均可以引起机械臂与障碍物之间碰撞的发生,因此本文拟采用分级讨论的方法来求解障碍物与各杆件碰撞的条件。
其总体思路为:首先求解关节1可能导致机械臂连杆与障碍发生碰撞的运动范围,后续各关节导致碰撞发生的情况均在该范围内讨论;在此范围之内可以推导出连杆2与障碍发生碰撞的条件;在连杆2与障碍不发生碰撞所对应的关节角2的范围内,讨论连杆3与障碍发生碰撞的条件;同理能够求得连杆4,连杆5与障碍发生碰撞的条件。
2.3 杆件与障碍碰撞条件分析由于杆件1只作绕自身轴线的运动,因此杆件1与障碍发生碰撞的情况不作考虑。
杆1与杆2之间的偏置量为0.3 m,而杆件模型为半径为0.15 m 的圆柱体,因此杆件1、2之间的偏置连杆与障碍发生碰撞的情况已包含在杆件1、2与障碍发生碰撞的分析过程中。