全国机器人大赛小车原理图
面向科技竞赛的自动控制搬运小车设计

能智造与信息技术面向科技竞赛的自动控制搬运小车设计吴羽歆赵振伟陈思羽王海琛张力文张悦(沈阳工业大学机械工程学院辽宁沈阳110870)摘要:本文基于单片机keil和Arduino技术,设计、制作并控制一台起重机器人,对中国大学生创新类比赛的实际赛况线路控制做了较为详细的技术分析。
本设计采用OpenMV作为识别标识的前端输入部件,Arduino与单片机为控制元件,通过利用Arduino与单片机串口通信来实现车体移动,单片机控制钩取装置和其他连接元件实现精准识别取物,保证重物摆放位置的精准性,实现全自动化。
关键词:搬运机器人控制系统单片机Arduino PID中图分类号:TP242文献标识码:A文章编号:1674-098X(2022)01(c)-0090-03Design of Automatic Control Handling Trolley for Science andTechnology CompetitionWU Yuxin ZHAO Zhenwei CHEN Siyu WANG Haichen ZHANG Liwen ZHANG Yue (School of Mechanical Engineering,Shenyang University of Technology,Shenyang,Liaoning Province,110870China)Abstract:Based on the keil and Arduino technology of single-chip microcomputer,this paper designs, manufactures and controls a crane robot,and makes a detailed technical analysis of the actual circuit control of the innovation competition of Chinese college students.This design uses OpenMV as the front-end input componentof the identification mark,and Arduino and single-chip microcomputer as the control components,and realizes the movement of the car body by using the serial communication between Arduino and single-chip microcomputer. The single-chip microcomputer controls the hooking device and other connecting components to achieve accurate identification and retrieval,ensure the accuracy of the placement of heavy objects,and achieve full automation.Key Words:Handling robot;Control system;MCU;Arduino;PID中国大学生起重机创意大赛是由中国机械工程学会主办的“中国大学生机械工程创新创意大赛”系列专业赛事之一,其宗旨是通过大赛增强大学生的科技创新意识,鼓励大学生积极投身科技创新与工程实践活动,提高大学生针对实际需求进行起重机设计和工艺制作的动手能力,拓宽大学生的科技创新视野,提升大学生对起重机在国民经济各领域的应用意识。
机械创新大赛说明书-智能搜救小车
智能搜救小车参赛单位:襄樊学院物理与电子工程学院参赛团队队员:一、创新构思,方案设计1、作品总体方案简介:本作品是针对事故、灾难现场勘测、侦查、搜救等问题而研制的一款灾难现场智能搜救小车。
第一,在搜救小车上安装了由传感器、MCU、液晶显示器等构成的控制与监测系统,用以实时监控并显示灾难现场(如火灾、地震等危险事故现场,人很难达到的地方)的温、湿度、光线强度、人体红外线辐射强度等环境参数;第二,在小车上安装摄像头及无线视屏发射机,利用无线视频传输系统将由摄像机所拍摄的现场场景、状况及由控制与监测系统所监测到的现场环境参数实时传送至营救中心,并且在营救中心设置相应的显示系统进行实时显示,使远离危险现场的搜救工作人员能清晰的看到事故现场的场景且及时而准确的了解到灾难现场的一些主要环境状况,从而有效提高了搜救执行效率,进一步减小人员伤亡和财产损失;第三,在小车上与营救中心处安装了一对对讲机,从而可实现小车与营救中心之间声音信号的双向传送,即:营救工作人员可以通过对讲机向灾难现场发出搜救声,同时灾难中的幸存者也可以借助对讲机向营救中心发出呼救声,且当发现幸存者后就可以通过调整小车的位置来实现营救中心与待救者的视屏通话,从而为实现有目的、高效率、人性化的远程救援工作奠定了坚实的基础;第四,在小车上安装了探照灯,使该小车在白天和夜晚都能工作。
2、作品构思的主要思路:a、采用TI公司生产的高速数字信号处理器TMS320LF2407A作主控制器,以AT89C52单片机作为辅助控制器,利用各种传感器采集环境参数,然后送入控制器处理,通过对控制器编制程序,实现对灾难现场环境各项参数的监测;b、采用Sony 公司生产的1/3CCD、520线摄像头拍摄灾难现场情景,并采用无线视屏传输系统将拍摄的视屏的视屏实时传输至观测点;c、采用摩托罗拉对讲机T-5720,实现营救中心与待救者的视屏通话;d、采用27MHZ 的无线遥控器控制小车的前、后、左、右的运动。
循迹小车原理
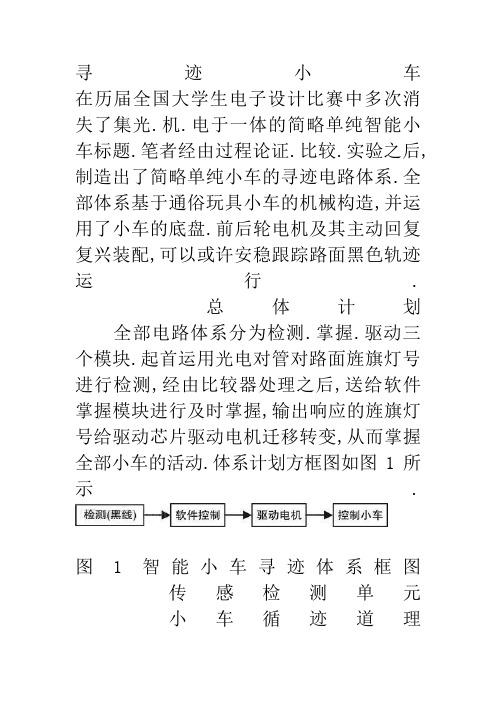
寻迹小车在历届全国大学生电子设计比赛中多次消失了集光.机.电于一体的简略单纯智能小车标题.笔者经由过程论证.比较.实验之后,制造出了简略单纯小车的寻迹电路体系.全部体系基于通俗玩具小车的机械构造,并运用了小车的底盘.前后轮电机及其主动回复复兴装配,可以或许安稳跟踪路面黑色轨迹运行.总体计划全部电路体系分为检测.掌握.驱动三个模块.起首运用光电对管对路面旌旗灯号进行检测,经由比较器处理之后,送给软件掌握模块进行及时掌握,输出响应的旌旗灯号给驱动芯片驱动电机迁移转变,从而掌握全部小车的活动.体系计划方框图如图1所示.图 1 智能小车寻迹体系框图传感检测单元小车循迹道理该智能小车在画有黑线的白纸“路面”上行驶,因为黑线和白纸对光线的反射系数不合,可依据接收到的反射光的强弱来断定“道路”—黑线.笔者在该模块中运用了简略.运用也比较广泛的检测办法——红外探测法.红外探测法,即运用红外线在不合色彩的物理概况具有不合的反射性质的特色.在小车行驶进程中不竭地向地面发射红外光,当红外光碰到白色地面时产生漫发射,反射光被装在小车上的接收管接收;假如碰到黑线则红外光被接收,则小车上的接收管接收不到旌旗灯号.传感器的选择市场上用于红外探测法的器件较多,可以运用反射式传感器外接简略电路克己探头,也可以运用构造简略.工作机能靠得住的集成式红外探头.ST系列集成红外探头价钱便宜.体积小.运用便利.机能靠得住.用处广泛,所以该体系中最终选择了ST168反射传感器作为红外光的发射和接收器件,其内部构造和外接电路均较为简略,如图2所示:图 2 ST168检测电路ST168采取高发射功率红外光.电二极管和高敏锐光电晶体管构成,采取非接触式检测方法.ST168的检测距离很小,一般为8~15毫米,因为8毫米以下是它的检测盲区,而大于15毫米则很轻易受干扰.笔者经由多次测试.比较,发明把传感器装配在距离检测物概况10毫米时,检测后果最好.R1限制发射二极管的电流,发射管的电流和发射功率成正比,但受其极限输入正向电流50mA的影响,用R1=150的电阻作为限流电阻,Vcc=5V作为电源电压,测试发明发射功率完万能知足检测须要;可变电阻R2可限制接收电路的电流,一方面呵护接收红外管;另一方面可调节检测电路的敏锐度.因为传感器输出端得到的是模仿电压旌旗灯号,所以在输出端增长了比较器,先将ST168输出电压与2.5V进行比较,再送给单片机处理和掌握.传感器的装配准确选择检测办法和传感器件是决议循迹后果的主要身分,并且准确的器件装配办法也是循迹电路利害的一个主要身分.从简略.便利.靠得住等角度动身,同时在底盘装设4个红外探测头,进行两级偏向改正掌握,将大大进步其循迹的靠得住性,具体地位散布如图3所示.图3 红外探头的散布图图中循迹传感器全体在一条直线上.个中X1与Y1为第一级偏向掌握传感器,X2与Y2为第二级偏向掌握传感器,并且黑线统一边的两个传感器之间的宽度不得大于黑线的宽度.小车进步时,始终保持(如图3中所示的行走轨迹黑线)在X1和Y1这两个第一级传感器之间,当小车偏离黑线时,第一级传感器就能检测到黑线,把检测的旌旗灯号送给小车的处理.掌握体系,掌握体系发出旌旗灯号对小车轨迹予以改正.第二级偏向探测器现实是第一级的后备呵护,它的消失是斟酌到小车因为惯性过大会依旧偏离轨道,再次对小车的活动进行改正,从而进步了小车循迹的靠得住性.软件掌握单元单片机选型及程序流程此部分是全部小车运行的焦点部件,起着掌握小车所有运行状况的感化.掌握办法有许多,大部分都采取单片机掌握.因为51单片机具有价钱低廉是运用简略的特色,这里选择了ATMEL公司的AT89S51作为掌握焦点部件,其程序掌握方框图如图4所示.图4 体系的程序流程图小车进入循迹模式后,即开端不断地扫描与探测器衔接的单片机I/O口,一旦检测到某个I/O口有旌旗灯号变更,程序就进入断定程序,把响应的旌旗灯号发送给电念头从而改正小车的状况. 车速的掌握车速调节的办法有两种:一是用步进电机代替小车上原有的直流电机;二是在原有直流电机的基本上,采取pwm调速法进行调速.斟酌到机械装配便利于修正等身分,这里选择后者,运用单片机输出端输出高电平的脉宽及其占空比的大小来掌握电机的转速,从而掌握小车的速度.经由多次实验,最终肯定适合的脉宽和占空比,基本性包管小车在所须要的速度规模内安稳前行.电机驱动单元从单片机输出的旌旗灯号功率很弱,即使在没有其它外在负载时也无法带动电机,所以在现实电路中我们参加了电机驱动芯片进步输入电机旌旗灯号的功率,从而可以或许依据须要掌握电机迁移转变.依据驱动功率大小以及衔接电路的简化请求选择L298N,其外形.管脚分布如图5所示.图5 L298N管脚散布图从图中可以知道,一块L298N芯片可以或许驱动两个电机迁移转变,它的使能端可以外接高下电平,也可以运用单片机进行软件掌握,极大地知足各类庞杂电路须要.别的,L298N的驱动功率较大,可以或许依据输入电压的大小输出不合的电压和功率,解决了负载才能不敷这个问题.结语此计划选择的器件比较简略,现实中也很轻易实现.经由多次测试,成果标明在必定的弧度规模内,小车可以或许沿着黑线轨迹行进,达到了预期目的.缺少之处,因为小车采取直流电机,其速度掌握不敷准确和稳固,不克不及实现急转和大弧度的拐弯.程序#include<reg51.h>#define uchar unsigned char#define uint unsigned intuchar pro_left,pro_right,i,j; //阁下占空比标记sbit left1=P2^0;sbit left2=P2^1;sbit right1=P2^2;sbit right2=P2^3;sbit en1=P1^0;sbit en2=P1^1;//循迹口三个红别传感器sbit left_red=P1^2; //白线地位sbit mid_red=P1^3; //黑线地位sbit right_red=P1^4; //白线地位void delay(uint z){uchar i;while(z){for(i=0;i<121;i++);}}void init(){left_red=0; //白线地位mid_red=1; //黑线地位right_red=0;TMOD=0X01;//准时器0选用方法1 TH0=(65536100)/256;TL0=(65536100)%256;EA=1;ET0=1;TR0=1;en1=1;en2=1;}void time0(void)interrupt 1 {i++;j++;if(i<=pro_right) {en1=1;} else en1=0;if(i==40) {en1=~en1;i=0;}if(j<=pro_left) {en2=1;}else en2=0;if(j==40) {en2=~en2;j=0;}TH0=(65536100)/256;TL0=(65536100)%256;}void straight() //走直线函数{pro_right=39;pro_left=39;left1=0;left2=1;right1=1;right2=0;}void turn_left() //左转弯函数{pro_right=5;pro_left=39;left1=0;left2=1;right1=1;right2=0;}void turn_right() //右转弯函数{pro_right=39;pro_left=5;left1=0;left2=1;right1=1;right2=0;}void turn_back() //撤退退却(反转)函数{left1=1;left2=0;right1=0;right2=1;pro_right=39;pro_left=39;}void infrared() //循迹{uchar flag;if(left_red==1){flag=1;}elseif(right_red==1){flag=2;}elseif((left_red==0)&(mid_red==0)&(right_red==0)) {flag=3;}else flag=0;switch (flag){case 0: straight();break;case 1: turn_left();break;case 2: turn_right();break;case 3: turn_back();break;default:break;}}void main(void){init();delay(1);while(1){infrared();// straight();}}void int0(void)interrupt 0 {}。
多功能电动智能小车(附电路图及源程序代码)、引力波的实验探测给我们的启示

多功能电动智能小车学院:电子科学与工程学院一引言1.作品设计的目的:本次设计智能小车的目的是为了实践电路设计的方法和技巧,将书本中的理论知识运用到实践中去,做到活学活用,深入了解电子元器件及其他元器件的基本用途和使用方法,并且能够灵活快速的判断电路中出现的故障,学会独立设计电路,积累更多的设计经验,加强并掌握焊接的能力和技巧,完成预期的要求。
2.作品设计的意义:智能小车实质上是众所周知的简易机器人雏形。
机器人设计是一个极富挑战性的高技术密集型项目,融小车机械、机器人学、机电一体化、单片机、数据融合、精密仪器、实时数字信号处理、图象处理与图象识别、知识工程与专家系统、决策、轨迹规划、自组织与自学习理论、多智能体协调、以及无线通讯等理论和技术于一体,既是典型的智能机器人系统,又为研究发展多智能体系统、多机器人之间的合作与对抗提供了生动的研究模型。
机器人设计通过提供标准任务,使研究人员利用各种技术来获得最佳解决方案。
机器人设计所采用的理论与技术可应用于工业生产、自动化流水线、救援、教育等领域,从而有效推动国家科学技术等其他高、精、尖领域的发展本小组本次研制的多功能智能小车具有寻迹、避障、消防和转向指示功能,可用与探测火源以及到某些人类不便接近的地点执行特殊任务,同时也是在机器人研究领域做一次大胆尝试。
3简易智能小车的原理:以单片机为电路的中央处理器来处理传感器采集到的数据,处理完毕后通过电机驱动电路来驱动电机。
电源部分为整个电路模块提供动力。
整体电路共分为七个部分:MCU控制电路、电机驱动电路、电源供电电路、寻迹检测电路、避障检测电路、LED显示部分,探测火源与灭火部分。
二总体方案设计(1)电动车车体的选择方案一:自制小车。
可在车模店选购配件组装,或者自行加工。
优点:这种方法能够制作出完全符合自身设计意图的车体。
缺点:需要较多时间和高水平的加工工艺。
方案二:配置成品的玩具电动小汽车。
优点:较方便。
缺点:不完全符合使用要求,需要做大量修改。
智能小车设计 ppt课件

同时使用3节普通干电池为单片机供电,电源 为4.5v。之所以采用两个独立的供电模块, 是为了避免使用同一电源时所造成的干扰, 同时也延长了小车的使用时间。
ppt课件
9
超声波测距方案选择
用超声波传感器进行避障。超声波传感器的
原理是:超声波由压电陶瓷超声波传感器发 出后,遇到障碍物便反射回来,再被超声波 传感器接收。这个过程中所消耗的时间乘以 超声波的传播速度就是障碍物与小车的距离。
挑战杯
团队:one is all
论文题目:基于单片机的智能小车 设计(灭火功能)
ppt课件
1
智能小车介绍
智能小车是一种能够通过编程手段完成特定任务的 小型化机器人, 它具 有制作成本低廉,电路结构简单, 程序调试方便等优点.由于具有很强的趣味性,智能 小车深受广大机器人爱好者以及高校学生的喜爱. 本论文介绍的是具有自动避障功能的智能小车的设 计与制作 (以下简称 智能小车) ,论文对智能小车的 方案选择,设计思路,以及软硬件的功能和工作原理 进行了详细的分析和论述.经实践验收测试,该智能 小车的电路结构简单,调试方便,系统反映快速,灵活, 设计方案正确,可行,各项指标 稳定,可靠.
ppt课件
17
实物图
ppt课件
18
烟雾传感模块
无碳重力势能小车设计全套 CAD图纸+说明书 1271

摘要通过对第二届全国大学生工程训练参赛作品“无碳重力势能小车”的分析。
发现小车在设计方面存在不足。
为了改进小车的不足之处,对小车的结构部分进行重新设计。
通过每一阶段的深入分析把设计尽可能向最优设计靠拢。
根据小车功能要求,把小车分为车架、原动机构、传动机构、转向机构、行走机构、微调机构六个模块,进行模块化设计。
首先针对每一个模块进行多方案设计,通过综合对比选择出最优的方案组合。
确定的方案为:车架采用三角底板式、原动机构采用了锥形轴、传动机构采用齿轮、转向机构采用曲柄摇杆、行走机构采用单轮驱动实现差速、微调机构采用微调螺母。
然后对方案进行理论分析,综合考虑零件材料性能、加工工艺等,进而得出了小车的具体参数和运动规律。
关键字:工程训练;参赛作品;重力势能小车;AbstractBased on the second national college engineering training entries" carbon-free gravitational potential energy car" analysis. Find cart in the design deficiencies. In order to improve the deficiency of the trolley car, a portion of the structure redesign. Through each phase of the in-depth analysis of the design as possible to move closer to optimal design.According to the functional requirements of the trolley car, divided into frame, driving mechanism, a transmission mechanism, a steering mechanism, a walking mechanism, a fine adjustment mechanism of six modules, modular design. First, for each module performs multiple design, through comprehensive comparison and choose the optimal scheme of combination. Determining the scheme are: frame with triangular bottom plate type, motive mechanism adopts a conical shaft, the drive mechanism adopts gear, steering mechanism with crank rocker, walking mechanism driven by a single wheel to achieve differential, fine tuning mechanism by fine adjustment nut. Then the scheme theory analysis, considering the parts and materials properties, processing technology, and then the specific parameters, and movement rules.Keywords:engineering training; entries; gravitational potential energy;目录摘要............................................................................................................. Abstract. (I)第1章绪论 01.1小车功能设计要求 01.2小车的设计方法 0第2章方案设计 (1)2.1重块支架 (2)2.2原动机构 (2)2.3传动机构 (3)2.4转向机构 (4)2.5行走机构 (5)2.6微调机构 (5)第3章技术设计 (6)3.1影响小车性能主要因素的分析 (7)3.1.1能耗规律分析 (7)3.1.2运动学分析 (9)3.1.3动力学分析 (13)第4章典型零件的设计及强度校核 (14)4.1 主动齿轮的设计 (14)4.2 主动齿轮的强度校核 (16)4.2.1齿轮的设计计算 (16)第五章典型零件加工工艺的分析及编写 (19)5.1驱动轴加工工艺分析 (19)5.1.1零件结构及其工艺性分析 (19)5.1.2零件技术要求分析 (19)5.2 驱动轴加工工艺编写 (20)结论 (21)致谢 (22)附录 (23)参考文献 (09)CatalogChinese abstract ...............................................................................................Abstract (I)First chapter Introduction (4)1.1 Car functional design repuirements (4)1.2 Car design method (4)The second chapter Scheme design (2)2.1 A heavy block bracket (3)2.2 Driving mechanism (3)2.3 Transmission mechansim (4)2.4 Steering mechansim (5)2.5 Walking mechansim (6)The third chapter Technical design (7)3.1 Analysis of the factors affecting the performance car (8)3.1.1 Energy dissipation analysis (8)3.1.2 Kinematic analysis (8)3.1.3 Dynamics analysis (14)The fourth chapter Typical part desgin and strength check (16)4.1 Driving gear desgin (16)4.2 Driving gear strength (17)3.1.3 Dynamics analysis (17)The fifth chapter Typical part machining analysis preparation of (20)5.1 Drive shaft processing technology analysis (20)5.1.1 Parts of the structure and process analysis (20)5.1.2 Technical requirements of (20)5.2 Drive axle processingpreparation (21)Conclusion (22)Thank (23)Appendix (24)Reference (29)第1章绪论1.1小车功能设计要求给定一重力势能,根据能量转换原理,设计一种可将该重力势能转换为机械能并可用来驱动小车行走的装置。
麦克纳姆轮小车原理
麦克纳姆轮小车原理麦克纳姆轮小车是一种适用于机器人或小车的驱动系统。
它由四个截面为45度斜角的轮子构成,每个轮子上都有一个小的滑轮,以使车轮能够在地面上自由旋转,并且可以灵活地移动。
这个配置有很多优点,包括使用更少的电机和更好的灵活性和机动性。
本文将介绍麦克纳姆轮小车原理的详细信息。
1. 麦克纳姆轮小车基本原理麦克纳姆轮小车可以看作是一个基于四个轮子驱动的车辆,它使用了麦克纳姆轮原理来实现灵活的移动和机械稳定性。
每个车轮由一个小的滑轮或滚轮构成,在地面上自由旋转。
这些滑轮以一定的角度放置,可以使车轮在地面上实现侧向移动。
这种配置可以实现四个自由度的移动,即可以在任意方向旋转并移动。
麦克纳姆轮小车的主要优点在于其灵活性和机动性。
因为每个车轮都可以独立旋转和在不同方向移动,车辆的运动性能更加灵活和可控。
这使得它成为机器人控制和移动方案的理想选择。
2. 麦克纳姆轮的工作原理麦克纳姆轮小车的工作原理基于其设计的滑轮或滚轮。
这些车轮是圆形的,有两组焊接在车轮上的T型滑轮。
这使得这些车轮可以在向外旋转时在地面上形成一个45度的角度,从而使车轮可以在侧向上滑动。
麦克纳姆轮小车的驱动和控制可以通过不同的方法实现。
最常见的方法是使用电机来控制车轮旋转,虽然这使得控制变得更加复杂,但它提供了更高的灵活性。
3. 麦克纳姆轮小车的运动特点麦克纳姆轮小车的运动性质取决于其设计和控制。
一个重要的特点是其灵活性和可控性。
它的机动性也受到了一些限制。
麦克纳姆轮小车的机动性可以通过不同的方式实现。
在正常操作中,车辆能够自由旋转,向前和向后移动,并在多个轴向上移动。
车辆的移动能力可能会受到不同的约束,例如地形和摩擦力。
由于车辆使用的是四个轮子,因此它的稳定性也会受到影响。
4. 麦克纳姆轮小车的控制麦克纳姆轮小车的控制需要使用适当的算法和控制器。
由于它具有高度的多样性和灵活性,因此应该使用适当的算法来确保良好的控制性能。
这些算法可以基于PID控制和轮子间协作等实现。
电子设计竞赛-寻迹避障一体小车-

循迹避障一体小车一)小车功能实现描述利用光电传感(红外对射管,红外发射与接收二极管组成)检测黑白线,实现小车能跟着白线(或黑线)行泄,同时也可避开障碍物,即小车寻迹过程中,若遇障碍物可自行绕开, 绕开后继续寻迹。
二)电路详细分析1.光电传感循迹光电传感器原理,利用黑白线对红外线不同的反射能力。
然后通过光敏二极管或光敏三极管,接收反射回的不同光强信号,把不同光强转换为电流信号,最后通过电阻,转换为单片机可识别的高低电平。
光电传感器实现循迹的基本电路如下图所示循迹传感器基本电路电路解释:TC端是传感器工作控制端,为高电平时,发光二极管不工作,传感器休眠,为低电平时,传感器启动。
Signal端为检测信号输出,当遇到黑线, 黑线吸收大量的红外线,反射的红外线很弱,光敏三极管不导通,signal输出高电平,当遇到口线,与黑线相反,反射的红外线很强,使光敬三极管导通,sign al输出低电平。
寻迹部分调整左右传感器之间的距离,两探头距离约等于口线宽度最合适,一般口线宽度选择范围为3 - 5厘米比较合适。
注意:该传感器的灵敏度是可调的,偶尔传感器遇到口线却不能送出相应的信号,通过调节传感器上的可调电阻,适肖的增大或减小灵墩度。
另外,循迹传感器的安放也算是比较有讲究的,有两种方法,一种是两个都是放置在白线内侧但紧贴口线边缘,笫二种是都放置在白线的外侧,同样紧贴白线边缘。
我们通常采用第二种方法。
编写程序使小车遇白线时,小车跟着白线走。
当小车先前前进时,如果向左偏离了白线。
那么右边传感器会产生一个低电平,单片机判断这个信号,然后向右拐。
回到口线后。
两传感器输出信号为高电平。
小车前进。
如果小车向右偏离白线,左边传感器产生一个低电平,单片机判断这个信号,然后向左拐。
如此如此,小车必不偏离口线。
若小车的两对光电传感器同时输出的信号为高电平(黑底)或低电平(白底),即单片机判断的都为高电平或低电平,小车向前直走, 在此过程中(直走)小车若遇白线,小车乂重复上面动作跟着白线走。
8字无碳小车的结构设计
参考文献
[1] 张 玉 航,黄力,王凯.8字 绕 障无碳 小 车 转向系统 的设 计 [J]. 科 技创新导 报,2014,(13):88-89.
[2] 吴 新良,刘建 春,郑 朝阳.重力驱动的 避 障 小 车设 计与制 造 [J].机 械 设 计,2014,31(10):25-28.
[3] 濮良 贵,纪 名 刚.机 械 设 计 [ M ].8 版.北 京:高 等 教 育出 版 社,20 0 6.
科技创新导报 2017 NO.18 Science and Technology Innovation Herald
D OI:10.16 6 6 0/ j.c n k i.1674- 0 98X.2017.18.110
8字无碳小车的结构设计①
工业技术
任帅 高远 邵梦莹 (南昌航空大学飞行器工程学院 江西南昌 330063)
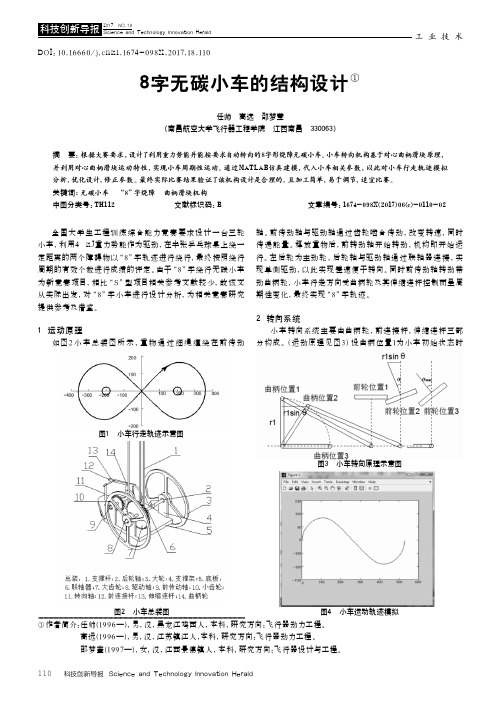
1 运动原理
如 图 2 小 车 总 装 图 所 示 ,重 物 通 过 细 绳 缠 绕 在 前 传 动
轴。前传 动 轴 与 驱 动 轴 通 过 齿 轮 啮 合 传 动,改 变 转 速,同 时 传 递能 量。释 放 重 物后,前 转 动 轴 开始 转 动,机 构 即 开 始 运 行。左 后 轮 为主动 轮,后 轮 轴 与 驱 动 轴 通 过 联 轴 器 连 接,实 现 单侧 驱动,以 此实 现 差 速便于 转向。同 时 前传 动 轴 转 动 带 动曲柄 轮,小 车 行 走方向受曲柄 轮及其伸 缩 连 杆 控制 而呈周 期 性变化,最 终实现“8”字 轨 迹。
关键词:无碳小车 “8”字绕障 曲柄滑块机构
中图分类号:TH112
文献标识码:B
文章编号:1674-098X(2017)06(c)-0110-02
全国大学生工程训练 综 合能力竞赛 要求 设 计一台三轮 小 车,利用4 k J重力势能作为驱动,在半 张乒 乓球桌 上 绕 一 定 距离的两个 障碍 物以“8”字 轨 迹 进行 绕 行,最 终 按照绕 行 周期 的有 效个数 进行成 绩 的 评定。由于“8”字 绕 行 无碳 小 车 为 新 竞 赛 项目,相比“ S ”型 项目相 关参 考 文 献 较 少,故 该 文 从实 际出发,对“ 8”字小 车进 行 设 计 分 析,为 相 关 竞 赛 研 究 提 供 参 考及借鉴。
机器人等级考试三四级产品资料-10.让智能小车动起来(无电机库版本)

在科技制作中,需要执行器给制作的装置提供动力,常用的执行器有直流电机、舵机、步进电机(步进是一种作为控制用的特种电机, 它的旋转是以固定的角度(称为“步距角”)一步一步运行的, 其特点是没有积累误差)等。
直流电机是自常见的执行器之一。
在红外遥控小风扇章节中通过晶体三极管控制电路实现了电机的启停控制和速度控制,但没有实现转向控制。
在很多自动控制场合都需要控制电机的正反转。
那具体应该如何控制电机的呢?H桥电路H桥电路名称的由来是因为控制电路的形状像英文字母H而得名。
控制电机正反转的H桥开关电路如右图所示:M HM C B当开关A与D闭合时,电流如右图指示方向流过电机。
M C B当开关B与C闭合时,电流如右图指示方向流过电机。
同侧的开关A、C或者B、D不能同时打开,否则将导致短路。
将上面的开关换成晶体管,就构成了现在常见的H桥控制电路,采用NPN和PNP 晶体管配对。
如右图所示,晶体管Q1、Q2 和 Q3、Q4的基极分别相连。
当左侧输入低电平,右侧输入高电平时,晶体管Q1和Q4导通,Q2和Q3断开,电流流动方向如右图所示。
当左侧输入高电平,右侧输入低电平时,电流流动方向和图示相反。
直流电机驱动和控制模块除了用晶体管自行组装H桥控制电路,还可以直接选用专用的电机驱动控制IC。
常见的驱动芯片如下图:L293D L298N TB6612 上面三种芯片都包含了两组H桥式电路,可以驱动并控制两个电机的正反转。
L298N和TB6612还需要有外围电路,所以使用时一般都采用成品的电机驱动模块。
使用TB6612电机驱动芯片,MA电机速度控制口:D5MA电机方向控制口:D7MB电机速度控制口:D6MB电机方向控制口:D8小车姿态图示引脚参数前进Motor_run(1,30)Motor_run(2,30)后退Motor_run(1,-30)Motor_run(2,-30)左转Motor_run(1,30)Motor_run(2,0)通过控制MA、MB来实现小车运动方向的控制:小车姿态图示引脚参数右转Motor_run(1,0)Motor_run(2,30)原地左转Motor_run(1,30)Motor_run(2,-30)原地右转Motor_run(1,-30)Motor_run(2,30)速度-30表示马达反着转项目一:让智能小车动起来所需器件:Ø已搭建好的智能小车一辆堵转:由于减速电机受到阻力,当输入的PWM值产生的动力小于阻力时,电机不能转动,此时,电机会发出嗡嗡的声音。
小车控制电路原理图
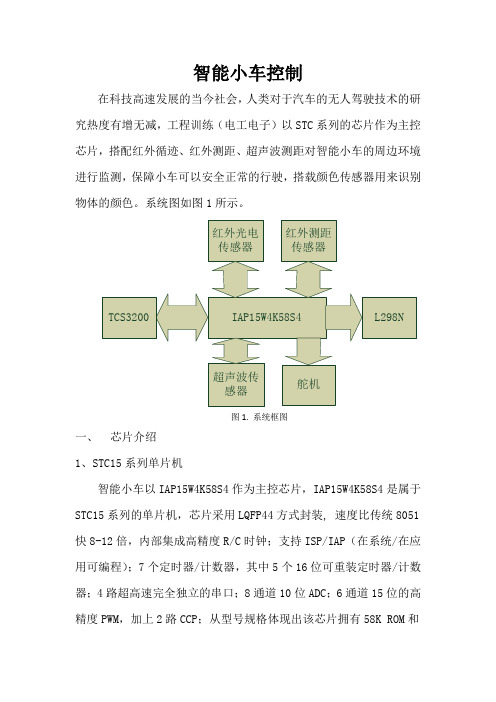
智能小车控制在科技高速发展的当今社会,人类对于汽车的无人驾驶技术的研究热度有增无减,工程训练(电工电子)以STC系列的芯片作为主控芯片,搭配红外循迹、红外测距、超声波测距对智能小车的周边环境进行监测,保障小车可以安全正常的行驶,搭载颜色传感器用来识别物体的颜色。
系统图如图1所示。
图1. 系统框图一、芯片介绍1、STC15系列单片机智能小车以IAP15W4K58S4作为主控芯片,IAP15W4K58S4是属于STC15系列的单片机,芯片采用LQFP44方式封装,速度比传统8051快8-12倍,内部集成高精度R/C时钟;支持ISP/IAP(在系统/在应用可编程);7个定时器/计数器,其中5个16位可重装定时器/计数器;4路超高速完全独立的串口;8通道10位ADC;6通道15位的高精度PWM,加上2路CCP;从型号规格体现出该芯片拥有58K ROM和4K RAM。
实物图如图2所示。
图2. IAP15W4K58S4实物图2、颜色传感器TCS3200颜色传感器TCS3200是TAOS公司推出的可编程彩色光到频率的转换器,采用8引脚表面贴装形式封装(如图3所示),它把可配置的硅光电二极管与电流频率转换器集成在单一的CMOS电路上,同时在芯片上集成四种不同的滤光器:红、绿、蓝(RGB)三种滤光器各16个,不带任何过滤器16个。
为了保证能够尽量减少入射光辐射不平衡,这64个过滤器是交叉排列,从而可以提高颜色识别率。
由于可以驱动标准的TTL或CMOS逻辑输入,所以可直接与MCU或其他逻辑电路相连接,并且可以直接输出数字量,并且能够实现每个彩色信道10位以上的转换精度,因而不再需要A/D转换电路,使电路变得更简单。
图3. TCS3200实物图TCS3200颜色传感器原理图如图4所示,利用三原色理,采集被测物的颜色,即各种颜色都是有三种颜色组成的,通过对芯片的S2、S3引脚编程选择不同的滤波器,它只能让某种特定的原色通过,经过电流到频率转换器后输出不同的方波,不同的颜色和光强对应不同频率的方波。
让小车动起来mixly——【全国机器人等级考试】

左转
motor1.run(1, 0) motor2.run(2, IntSpeed)
速度-IntSpeed表示马达反着转
小车姿态 右转
原地左转
原地右转
图示
引脚参数 motor1.run(1, IntSpeed)
motor2.run(2, 0)
motor1.run(1, -IntSpeed) motor2.run(2,IntSpeed)
注意2:小车必须用锂电池供电才能正常工作。
程序分析
课课后后小小结结
motor1.run(1,IntSpeed) motor2.run(2, -IntSpeed)
项目一:让智能小车动起来 所需器件: ➢ 已搭建好的智能小车一辆
搭建好的智能小车如右图。
堵转:由于减速电机受到阻力,当输入 的PWM值产生的动力小于阻力时,电机 不能转动,此时,电机会发出嗡嗡的声 音。 注意:当电机出现堵转的时候需要及时 停止驱动,时间稍长会烧坏电机。
那具体应该如何控制电机的呢?
H桥电路
H桥电路名称的由来是因 为控制电路的形状像英文字母
M
H而得名。控制电机正反转的
H桥开关电路如右图所示:
Hale Waihona Puke 当开关A与D闭合时,电流如右图指示方向流过电机。
B
M
C
B
当开关B与C闭合时,电流如右图指示方向流过电机。 同侧的开关A、C或者B、D不能同时打开,否则将导致短路。
直流电机驱动和控制模块
除了用晶体管自行组装H桥控制电路,还可以直接选用专用的电机驱动控制IC。 常见的驱动芯片如下图:
L293D
L298N
TB6612
上面三种芯片都包含了两组H桥式电路,可以驱动并控制两个电机的正反转。
红外避障小车原理介绍及制作(课堂PPT)

设计
绘图
组别 第9组
审核
10
零件图
电机支架
电 机 支 架 比例 图号 数量 共 张 第张
设计
绘图
组别 第9组
11
审核
五、软件设计
程序流程图:
Y N
12
功能:本品基于红外传感系统,采用红外传感器实 现前方障碍物检测,来实现自动检测前方障碍物,
并能通过单片机控制舵机实现左、右转弯来避开障 碍物。
应用场合及市场前景:可用于恶劣地理环境中无人
驾驶汽车的物动避障车的应用前景广泛。
2
二、系统结构框图
3
三、硬件设计
智能避障小车
刘萌萌 徐英蛟 孙宪佳 宋云石
1
一、概述
设计背景:针对高危环境下对无人化作业的要求, 机器人在复杂地形中行进时自动避障及恶劣环境中 无人驾驶汽车的物资运输,自动避障是一项必不可 少也是最基本的功能设计。另外,市场现在的遥控 玩具小车遇到障碍物时不能自动避开障碍,需人工 手动把玩具车拿开,若加入自动避障功能可省去人 工操作。
系统总设计电路图如下图
4
各部分电路图及说明
单片机最小系统
L298电机控制驱动:
5
各部分电路图
光耦电路
电机保护电路
6
各部分电路图及说明
模拟电源
7
四、机械部分
总的装配图如下图:
8
零件图
车身板
车身板
比例 图号 数量 共 张 第张
设计
绘图 审核
组别 第9组
9
零件图
连杆
连杆
比例 图号 数量 共 张
机器人小车

浙江大学第十二届“中控杯”机器人竞赛技术报告一、方案总述我们通过红外传感器计算距离,当小车前端并排三个红外线传感器中的左右红外线传感器同时接收到反射回来的信号的时,记作移动一格,同时通过前后总共四个传感器使小车在白线上行驶。
并且通过机械臂把双倍球放入圆台上的home区并抓取圆台中间的绿砖,这个功能放到比赛的后半端去实现。
通过两个比较常用的L298N电机驱动模块来驱动4个12V直流减速电机,L298N板子逻辑供电5V(将12V分出来通过稳压降压成为5V),驱动电压12V。
4路红外传感器,前端3个,后端1个,用于巡线,逻辑电压5V,信号接入单片机。
舵机控制板5V逻辑电压,驱动电压7.4V,通过接口与单片机进行通信,实现对舵机的并行控制。
小车总体示意图:机器人大体为两层的轮式机器人结构,中间用双内螺纹铜柱连接总体尺寸: 290 mm(长)× 280 mm(宽)× 285 mm(高)预估质量:直流减速电机 320g ×4航模电池 600g小车总质量 3 Kg二.机械部分1、小车的电机我们选用了37GA555直流齿轮减速电机,轮子采用的65mm的普通橡胶轮,电机参数如下:额定力矩:3.5 Kg·cm电压:12 VDC直径:37 mm轴长:20 mm(带有90度切口)轴直径:6 mm长度:88 mm(含编码器、减速箱,但不含输出轴)堵转电流:4.5 A减速比:19.3:1空载转速:330 转/分钟额定转速:247.5 转/分钟机械手以及双角前端使用到的舵机:1)MG996:净重: 55g尺寸: 40.7*19.7*42.9m扭矩:10.5kg/cm(4.8V),13kg/cm(6V)反应速度: 0.20sec/60degree(4.8v)0.17sec/60degree(6.0v)工作电压: 4.8-7.2V工作温度: 0℃-55℃2、搬运砖块我们队使用的方法是推动砖块,使砖块进入前面的双角中,双角呈现怀抱的姿势,中间留出8cm的距离使得砖块顺利进入,同时使得砖块在小车转弯的时候不容易出去,根据设计前面为12cm×25cm,理论上可以容纳8个砖块。
工业机器人设计自动往返小车设计说明书样本

(2)齿轮之间缺少润滑。
解决方案:
(1)调节齿轮中心距,使其重叠度等(大)于1,避免齿面互相撞击;
(2)在齿轮啮合处用了粘度高润滑油。
5.2小车活塞式开关反映不敏捷
问题体现:在试车过程中有时导杆撞到障碍物但活塞式开关动触点并没有移动,或位移量很小,无法与静触点接触导电。【5】齿轮(百科)【6】电机(百科)
【7】玩具四驱车(搜搜百科)
4.2安装直流电机
把两根铜芯细软导线与3V直流小电机接线端子用电烙铁焊接,焊接完毕后用厚双面胶把电机粘贴在塑胶底板上,粘贴牢固与齿轮变速箱啮合。
4.3焊接与安装电源
把四节1.5V电池两两正负极用电烙铁焊接构成两个供电电源,为电机提供极性相反电能,并用双面胶把其粘贴进电池卡槽内。
图-5电源安装图
4.4制作与安装活塞式开关
第3章制作准备
3.1工具准备
制作工具重要有:螺丝刀、电烙铁、焊锡、松香、剪刀、双面胶、小刀、打火机等。
图-3工具
3.2材料准备
制作材料重要有:3V直流电机1个、1.5V电池4枚、导线数条、注射器3支、自行车轮辐条1根等。
图-4选用材料
第4章制作自动来回小车
4.1制作小车底板
小车底板可选用材质强度高质地轻塑胶板,可以直接购买玩具小车拆卸其底板。
工业机器人设计(论文)
题目:自动来回小车
姓 名:
学号:
班 级:
平顶山工业职业技术学院
年 月 日
第1章电动小车改进方案
1.1设计思想来源
现实中有诸多电机驱动玩具小车接通电源后只能迅速向前运营,当期遇到障碍物时却不能回倒,进行反向运营。因而若想让小车可以在撞到前方障碍物时可以返回,必要对其控制系统进行改进。
全国大学生智能车大赛作品-智能循迹小车技术文档

MC9S12DG128B MMA1260D CCD 摘要本文是为参加第二届全国大学生智能小车竞赛而撰写的的技术报告,本文详细介绍了智能寻迹小车的路径检测、转向控制、电机驱动、车速检测、坡度检测、电源管理等功能模块硬件电路及软件控制算法的设计。
智能小车以“飞思卡尔”16位微控制MC9S12DG128B为主控制器,采用CMOS摄像头和红外传感器相结合的方法(红外传感器主要用来检测起跑线和“十”字路线)来检测路面信息,运用反射式红外传感器检测小车速度,MMA1260D传感器检测路面坡度信息。
同时,采用PWM技术控制舵机的转向和电机转速。
系统还扩展了LCD液晶显示屏和键盘模块作为人机操作界面,以便于智能小车的相关参数调整。
用串口将采集的路面黑线信息传送到PC进行分析,结合BangBang速度闭环控制等算法,控制小车沿着预设的轨道黑线及时调整车身姿态,准确、快速地跑完全程。
第一章概述1.1智能车系统概述及框图本文详细介绍了智能寻迹小车的路径检测、转向控制、电机驱动、车速检测、坡度检测、电源管理等功能模块硬件电路及软件控制算法的设计。
智能小车以“飞思卡尔”16位微控制MC9S12DG128B为主控制器,采用CCD摄像头和红外传感器相结合的方法(红外传感器主要用来检测起跑线和“十”字路线)来检测路面信息,运用反射式红外传感器检测小车速度,MMA1260D传感器检测路面坡度信息。
同时,采用PWM 技术,控制舵机的转向和电机转速。
系统还扩展了LCD液晶显示屏和键盘模块作为人机操作界面,以便于智能小车的相关参数调整。
用串口将采集的路面黑线信息传送到PC进行分析,结合PID等算法,控制小车沿着预设的轨道黑线及时调整车身姿态,准确、快速地跑完全程。
根据摄像头和红外传感器结合的方案设计,赛车共包括八大模块:控制处理芯片MC9S12DG128,图像采样模块,车尾红外传感器模块,速度检测模块,坡度检测模块、舵机驱动模块,电机驱动模块和辅助调试模块。
全国青少年机器人技术等级考试四级课件第十课10小车搭建

01 小 车 搭 建
玩科技 学知识
玩科技 学知识
02 单片机搭建
玩科技 学知识
玩科技 学知识
玩科技 学知识
玩科技 学知识
玩科技 学知识
玩科技 学知识
玩科技 学知识
玩科技 学知识
03
电机驱动搭建
玩科技 学知识
玩科技 学知识
玩科技 学知识
玩科技 ቤተ መጻሕፍቲ ባይዱ知识
玩科技 学知识
06 支架搭建
玩科技 学知识
玩科技 学知识
07
电机底盘搭建
玩科技 学知识
玩科技 学知识
玩科技 学知识
玩科技 学知识
玩科技 学知识
玩科技 学知识
玩科技 学知识
08 传感器搭建
玩科技 学知识
玩科技 学知识
玩科技 学知识
玩科技 学知识
玩科技 学知识
09 整车搭建
玩科技 学知识
玩科技 学知识
玩科技 学知识
玩科技 学知识
玩科技 学知识
玩科技 学知识
10 小 车 完成
玩科技 学知识
玩科技 学知识
Arduino
Arduino是一款便捷灵活、方便上手的开源 电子原型平台。包含硬件(各种型号的 Arduino板)和软件(Arduino IDE)。由一 个欧洲开发团队于2005年冬季开发。学习编 程的内在知识,为以后的复杂的项目开发打 下铺垫。 Arduino能通过各种各样的传感器来感知环 境,通过控制灯光、马达和其他的装置来反 馈、影响环境。板子上的微控制器可以通过 Arduino的编程语言来编写程序,编译成二 进制文件,烧录进微控制器。
玩科技 学知识
04
舵机结构搭建