WIFI智能小车机器人
智能小车资料

智能小车的产业化发展现状与趋势
产业化发展现状
• 市场规模:智能小车市场规模不断扩大 • 产业格局:形成完整的产业链,包括硬件、软件、服务 等 • 技术创新:技术创新不断推动产业发展
产业化发展趋势
• 智能化:进一步提高车辆的智能化水平 • 集成化:实现设备之间的协同工作和资源共享 • 个性化:满足不同用户的需求,提供个性化的定制服务
智能小车的未来研究方向与挑战
未来研究方向
• 新型感知技术:如深度学习、计算机视觉等 • 先进控制算法:如强化学习、自适应控制等 • 智能交互设计:提高车辆与用户的交互体验
未来挑战
• 技术突破:实现更高水平的智能化和自主性 • 安全可靠:保证车辆在各种环境下的稳定运行 • 成本效益:降低生产成本,提高市场竞争力
智能小车的功能开发与调试
功能开发
• 导航功能:实现车辆的自主导航和定位 • 控制功能:实现车辆的速度、转向等控制 • 感知功能:实现车辆的感知周围环境,如避障、识别等
调试方法
• 硬件在环:通过仿真环境进行硬件调试 • 软件在环:通过虚拟环境进行软件调试 • 实际环境:在实际场景中进行测试和验证
04 智能小车的通信与系统集成
智能小车的功能安全设计
功能安全设计的要点
• 故障诊断:实时监测车辆状态,及时发现故障 • 故障处理:对故障进行自动处理或报警,保证车辆安全 • 冗余设计:提高系统的可靠性和稳定性,防止单点故障
功能安全设计的方法
• 安全策略:制定安全策略,明确安全目标和措施 • 安全验证:通过仿真和实际测试进行安全验证 • 安全更新:定期更新安全策略和算法,提高安全性
DOCS SMART CREATE
智能小车设计与实现
CREATE TOGETHER
机器人智能小车制作与编程
机器人智能小车制作与编程
一、智能小车的制作
1、准备材料:电机、智能小车及其相关的板、轮子、电池、杜邦线、螺丝刀、钳子、电钻、活动榫头、把手以及其他相关材料。
2、连接电机与电池:将电机与电池连接起来,用杜邦线将正极引脚
连接到电机的正极,负极引脚连接到电机的负极,确保电池与电机之间的
稳定连接和电路的正确性。
3、安装电机:将电机安装在智能小车的底盘上,使用螺丝刀将电机
固定在底盘上,确保电机的稳定性和牢固性。
4、连接轮子:将轮子连接到电机上,将活动榫头连接到轮子上,再
将把手连接到活动榫头上,以保证轮子与电机之间的稳定连接。
5、安装智能小车板:将智能小车板安装在轮子上,使用螺丝刀将其
固定在轮子上,以保证智能小车板的稳定性和牢固性。
二、智能小车的编程
2、配置参数:将智能小车的电机、电池、摄像头等硬件连接到计算
机上,打开Arduino IDE软件,根据硬件的设置进行参数配置,确保硬件
参数的正确性。
3、编写代码:根据智能小车的功能,利用Arduino IDE进行软件编写,编写完成后,将代码上传到智能小车板上。
基于51单片机WiFi智能小车制作
基于51单片机WiFi智能小车制作基于51单片机WiFi智能小车制作一、基本原理51单片机WiFi智能小车是利用PC或手机作为控制端,通过手机连接wifi模块(路由器)以获得wifi信号,同时车载也连接wifi模块以获得和手机相同的IP地址,实现手机和小车的连接,然后利用PC或手机上的控制软件以wifi网络信号为载体发送相关信号,wifi模块接收PC 或手机端发送来的相关信号并分析转换成TTL 电平信号,然后发送给单片机,单片机接收到的电平信号处理、分析、计算,转化成控制指令并发送给电机驱动模块以实现小车的前进、后退、左拐、右拐等功能。
二、购买所需材料了解51单片机WiFi智能小车基本原理后,需要购买所需材料进行制作。
下面列出所需制作材料:序号材料备注图例6 小车底盘7 摄像头 根据固件支持摄像头购买8 电源根据自己需要购买种类9 杜邦线及小配件制作所需工具:序号工具名备注图例称1 电烙铁一套 包括松香焊锡2 螺丝刀 平口、十字等3 微型电钻 可以自制4手工刀5 剪刀6 万用表7 热熔胶枪或快干胶8US B下载器三、开始制作1、制作流程开始制作前,我们首先需要看购买路由器的型号,笔者采用的是703n 路由器,所以需要引出ttl 线。
总体步骤为:路由器引TTL 线→路由器刷OpenWrt 固件→制作51单片机最小系统→下载下位机程序到51单片机→安装上位机程序至PC 或手机→测试上、下位机通信→组装→调试完成。
2、路由器引ttl线首先打开703n路由器,按照下图标示位置焊接ttl线。
注意:1、焊接的时候要小心焊接,焊好后微拉下查看松紧2、焊接最好采用软线焊接,防止意外整块拉掉焊点3、焊好后一定用胶固定,最好采用热熔胶下图为引好ttl线样子3 刷OpenWrt固件何为OpenWrt固件,OpenWrt可以被描述为一个嵌入式的Linux 发行版,(主流路由器固件有dd-wrt,tomato,openwrt三类)而不是试图建立一个单一的,静态的系统。
智能小车原理

智能小车原理
智能小车是一种具有自主导航、避障、智能控制等功能的智能机器人,它可以在不需要人工干预的情况下,根据预设的路径或自主感知周围环境来进行移动和操作。
智能小车的原理涉及到多个领域的知识,包括传感器技术、控制算法、机械结构设计等。
本文将从这些方面逐一介绍智能小车的原理。
首先,智能小车的传感器技术是其实现自主导航和避障的关键。
常见的传感器包括红外线传感器、超声波传感器、摄像头等。
红外线传感器可以用来检测障碍物的距离,超声波传感器可以实现对障碍物的定位,摄像头则可以获取更加精确的环境信息。
这些传感器通过将环境信息转化为电信号,并传输给控制系统,从而使智能小车能够感知周围环境并做出相应的反应。
其次,智能小车的控制算法是实现自主导航和避障的核心。
控制算法需要根据传感器获取的环境信息,结合预设的路径或目标,来实现对小车运动的控制。
常见的控制算法包括PID控制、模糊控制、遗传算法等。
这些算法可以使小车在复杂的环境中做出快速而准确的决策,从而实现自主导航和避障。
最后,智能小车的机械结构设计也对其性能有着重要影响。
机械结构需要保证小车的稳定性、灵活性和承载能力,以适应不同的场景和任务需求。
同时,机械结构设计也需要考虑传感器的布局和安装位置,以确保传感器能够准确地感知周围环境。
综上所述,智能小车的原理涉及传感器技术、控制算法和机械结构设计等多个方面。
通过合理的传感器选择和布局、高效的控制算法设计以及稳定的机械结构,智能小车可以实现自主导航、避障等功能,从而在各种场景中发挥作用。
希望本文的介绍能够帮助读者更好地理解智能小车的原理,为相关领域的研究和应用提供参考。
智能机器人小车毕业设计
智能机器人小车毕业设计
摘要
本文介绍的是一款具有自主智能的小型机器人小车,它的功能包括定
位系统,车载摄像头配合图像处理算法来实现自动导航,有效规避障碍物,一节锂电池实现有效的供电,支持快速充电及免驱系统,支持的控制协议
有RS485和CAN,底盘结构采用轻量化的结构设计,具有耐冲击,稳定性
及MAX性能可靠性等,本文结合实验结果,讨论了机器人小车对定位系统,车载摄像头,图像处理,锂电池,总线控制和底盘结构设计的设计、试验
及实现。
关键词:机器人小车,定位系统,车载摄像头,图像处理,锂电池,
总线控制,底盘结构
1、小车结构
小车部件采用轻量级结构,设计有双挡减震系统,有效地保护小车结构,降低行驶时的噪声和冲击,其底部采用2mm钢板,有效加固底部结构,并设计有四个旋转导轨,可以调节小车的行驶高度,有效减少地面摩擦,
提高行驶速度和稳定性,同时采用固定式车用活动轮子来保证小车的平稳
行驶。
2、定位系统
小车的定位系统采用GPS和基站融合定位方式实现小车定位,GPS模
块通过接收卫星的信号获取小车的位置信息。
基于WIFI的智能屏障小车的设计与实现
毕业设计(论文)设计(论文)题目:基于WIFI的智能屏障小车的硬件设计与实现学生姓名: 钱兴晖指导教师:吴刚副教授二级学院:计算机工程学院专业:计算机科学与技术班级:12计算机科学与技术2班学号: 1205104045 提交日期: 2016年4月20日答辩日期: 2016年5月8日目录摘要 (Ⅲ)Abstract (Ⅳ)1 绪论 (1)1.1 课题背景与意义 (1)1。
1.1 课题背景 (1)1。
1。
2 课题意义 (1)1。
2 研究现状 (1)1.3 论文的主要研究内容及论文结构 (2)2 智能小车硬件系统设计 (3)2.1 智能小车的车体结构选择 (3)2。
2 智能小车控制系统方案 (3)2.3 电源系统设计 (4)2。
4 微控制器模块 (5)2.4。
1微控制器选择 (5)2。
4.2主控制器的最小系统电路 (5)2.5 障碍物检测模块 (7)2。
5.1超声波传感器 (7)2。
5。
2红外线传感器 (9)2.6 电机驱动模块 (10)2。
6。
1驱动电机的选择 (10)2。
6.2转速控制方法 (10)2.6.3电机驱动模块设计 (11)2。
7 通信拓展模块 (13)2。
7。
1无线通信模块 (13)2。
8 硬件设计中注意的问题 (15)2。
9 本章总结 (15)3 红外避障功能的软件设计 (16)3。
1 软件开发平台介绍 (16)3。
2 障碍物检测算法 (16)3.3 自动避障算法 (17)4 智能小车系统仿真与调试 (19)4.1 仿真器的选择 (19)4。
2 调试过程 (20)4。
2。
1 WIFI控制功能调试 (20)4。
2.2 超声波屏障功能调试 (20)4。
2。
3 红外避障功能调试 (21)5 总结与展望 (22)5.1 设计总结 (22)5。
2 设计展望 (22)参考文献 (23)附录 (25)致谢 (37)基于WIFI的智能屏障小车的硬件设计与实现摘要智能机器人是一种不需要人为操控,能够自行根据系统集成的传感器反馈的信号作出自主行为判断的智能化移动平台。
智能小车开题报告

摄像头
蜂鸣器电路
89C52
路由器模块 电脑控制终端
单 片 机
图2-1系统结构框 图
充当的,主要控制小车的行进方向和速度。
2.1 智能小车的现状:
❖ 世界各国在智能微型车领域进行了很多研究,己经应用于各 个领域,在探测和军事领域使用特别多。智能小车发展很快 ,从智能玩具到其它各行业都有实质成果。其基本可实现循 迹、避障、检测贴片、寻光入库、避崖等基本功能,近年来 ,我国也开展了很多研究工作,以满足不同用途的需要。单 片机的应用领域越来越广泛,无论是在生活,生产上,单片 机无处不在。ATMEL公司的AT89S51单片机可以广泛应用 于计算机外部设备、工业实时控制、仪器仪表、通讯设备、 家用电器等各个领域。
驶,实现实时显示时间、速度、里程,具有自动寻迹、寻光、
避障功能,可程控行驶速度、准确定位停车等运动状态进行实
2时021控/5/2制7 。
4
1.1 智能小车的主要应用领域
a. 军事侦察与环境探测:现代战争对军事侦察提出了更高 的要求,世界各国普遍重视对军侦察的建设,采取各种有效 措施预防敌方的突然袭击,并广泛应用先进科学技术,不断 研制多用途的侦察器材和探测设备,在车上装备摄像机、安 全激光测距仪、夜视装置和卫星全球定位仪等设备,通过光 缆操纵,完成侦察和监视敌情、情报收集、目标搜索和自主 巡逻等任务,进一步扩大侦察的范围,提高侦察的时效性和 准确性。
3. 方案设计:
1. 了解智能小车的 组成与控制原理; 2. 选择处理器和相
wifi智能小车实训报告
wifi智能小车实训报告一、实训内容概述为了更好地培养我们计算机科学与技术专业的学生的实际操作能力,我们学校开展了一次为期一个月的Wifi智能小车实训。
该实训旨在通过设计并组装Wifi智能小车来锻炼同学们的动手能力和技术能力,同时也为同学们提供了一个了解物联网相关技术的机会。
二、实训过程详述1、选购器材在实训之前,我们需要先选购实验所需的器材。
其中包括Wifi模块、HC-SR04距离传感器、小车底盘、直流电机、轮子等材料。
我们采购时不仅需要关注价格,同时也需要注意品质和适配程度,以保证实训顺利进行。
2、组装小车底盘我们首先要组装小车底组,这就需要将小车底盘、直流电机和轮子等器材放在一起进行组装。
这一步需要大家仔细阅读说明书,并在老师的指导下逐步进行。
3、添加HC-SR04距离传感器为了使小车具备自主避障能力,我们需要为小车添加 HC-SR04距离传感器。
至于如何添加,就需要我们具备一定的编程开发知识,老师为我们介绍了 Arduino IDE 和 MicroPython 两种编程工具。
4、编写程序代码在添加完传感器之后,接下来就要编写程序了。
代码的编写包含了两个部分,一个是确定小车的移动方向和速度,并通过串口监视器将数据实时传输到电脑端;另外一个部分是实现HC-SR04距离传感器的功能,保证小车能够自主避障。
5、本地测试和远程调试经过以上步骤,我们可以在本地使用电脑的串口通信端口来测试小车的各项功能。
当测试通过后,我们就可以将代码迁移到ESP8266 Wifi 模块中进行远程调试。
这意味着我们可以通过手机等电子设备操作小车,并进行观察调试。
三、实训成效总结通过本次实训,我们不仅学会了组装小车、添加传感器和编写程序代码等技能,还了解了IoT物联网相关知识。
在实验过程中,我们遇到了一些组装困难、调试难度大等问题,经过不断尝试,最终成功解决了问题。
整个过程让我们切实感受到了科技带给我们的便利和乐趣,进一步增强了我们对于计算机技术的热爱。
DIY wifi智能小车.docx

DIY wifi智能小车时下非常流行制作WIFI视频小车,所谓的wifi智能小车就是可以通过WIFI网络控制的视频传输可移动甚至可以安装其他机械手各类传感器实现数据互动的小车。
你可以理解为电影、科教片里面的防爆机器人的原型机,或者说是火星勇气号的原型机。
呵呵。
防爆机器人火星探路车“勇气号”下面展示下我们这里所DIY的WIFI智能小车,还行吧,是不是很酷,这不是重点,主要是他组装简单、一般懂得点电脑知识的朋友都可以尝试下,PC操控软件下面我们介绍下他的基本原理:WIFI智能小车包括5个部分:1.微电脑控制板(单片机控制板附带电机驱动)2.Openwrt路由器3.301摄像头4.小车底盘5.12V锂电池组下面我们分别介绍下:1.微电脑控制板(单片机控制板附带电机驱动):就是大家常说的单片机,最好自带电机驱动,这样就非常方便,他可以与openwrt路由器进行串口通信,通过p3.0 p3.1连接。
2.Openwrt路由器:她是WIFI智能小车的核心,或者迅捷3G 171刷成Openwrt路由器。
机,当然不能打电话,但操作系统相当于安卓,一种简化的linux系统。
支持301摄像头,不是所有的摄像头都支持呀。
3.301摄像头:不多说,是一种型号,30元左右。
必须这种型号才行。
4. 小车底盘:这里也不必解释太多,就是一个亚克力板上面固定了4个减速电机和轮子,给电机通电后就可以跑起来。
5. 12V锂电池组:非常重要,是成功的保证,因为wifi智能小车对电力要求较高。
充足稳定的电能是成功的保证。
基本原理图:下面我进行图片展示:路由器刷完openwrt后,连接301摄像头就可以通过电脑进行查看视频了,就相当于一个网络监控器。
摄像头+路由器算起来就120元左右,简直太廉价了。
但离wifi小车还差一步,需要进行串口改装,敲开路由器:这个步骤是真正考验你的时候,电烙铁要用的好,用漆线连接。
小车底盘:电机导线要焊接好,必要需要用热缩管固定,可靠性非常重要。
智能小车概述ppt课件

具有自主导航、避障、搬运、定位、 无线通信等多种功能,可广泛应用 于工业自动化、智能物流、服务机 器人等领域。
发展历程及现状
发展历程
智能小车经历了从遥控车到自主导航车的演变,随着传感器、计算机视觉、人 工智能等技术的不断发展,智能小车的性能和应用范围得到了显著提升。
现状
目前,智能小车已经成为机器人领域的研究热点之一,国内外众多高校和企业 都在积极开展相关研究,并取得了丰硕的成果。
设计电源管理模块,实现电源的充电、 放电、保护等功能。
04
CATALOGUE
软件系统开发与调试
嵌入式操作系统选型及移植
01
常见的嵌入式操作系统 比较:如Linux、 FreeRTOS、uCOS等
02
选定操作系统的理由与 优势分析
03
操作系统移植的步骤与 注意事项
04
移植过程中可能遇到的 问题及解决方案
02
CATALOGUE
智能小车关键技术解析
传感器技术
红外传感器
用于检测障碍物、测距等。
超声波传感器
实现非接触式测量,常用于泊车 辅助系统。
摄像头与图像传感器
用于环境感知、道路识别等视觉 任务。
雷达传感器
提供高精度距离和速度信息,用 于自动驾驶系统。
控制器与执行器技术
微控制器
作为智能小车的“大 脑”,负责数据处理和
机器人教育
智能小车作为机器人教育的载体,可帮助学生了解机器人原理、编 程等知识。
教学实验平台
智能小车可作为教学实验平台,支持学生进行各种创新性实验和项 目实践。
比赛竞技
智能小车比赛可激发学生创新精神和团队协作能力,培养学生综合素 质。
06
智能小车的心得体会
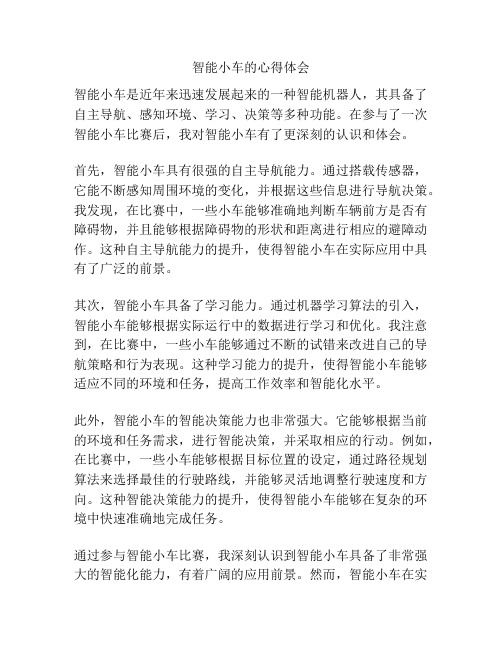
智能小车的心得体会智能小车是近年来迅速发展起来的一种智能机器人,其具备了自主导航、感知环境、学习、决策等多种功能。
在参与了一次智能小车比赛后,我对智能小车有了更深刻的认识和体会。
首先,智能小车具有很强的自主导航能力。
通过搭载传感器,它能不断感知周围环境的变化,并根据这些信息进行导航决策。
我发现,在比赛中,一些小车能够准确地判断车辆前方是否有障碍物,并且能够根据障碍物的形状和距离进行相应的避障动作。
这种自主导航能力的提升,使得智能小车在实际应用中具有了广泛的前景。
其次,智能小车具备了学习能力。
通过机器学习算法的引入,智能小车能够根据实际运行中的数据进行学习和优化。
我注意到,在比赛中,一些小车能够通过不断的试错来改进自己的导航策略和行为表现。
这种学习能力的提升,使得智能小车能够适应不同的环境和任务,提高工作效率和智能化水平。
此外,智能小车的智能决策能力也非常强大。
它能够根据当前的环境和任务需求,进行智能决策,并采取相应的行动。
例如,在比赛中,一些小车能够根据目标位置的设定,通过路径规划算法来选择最佳的行驶路线,并能够灵活地调整行驶速度和方向。
这种智能决策能力的提升,使得智能小车能够在复杂的环境中快速准确地完成任务。
通过参与智能小车比赛,我深刻认识到智能小车具备了非常强大的智能化能力,有着广阔的应用前景。
然而,智能小车在实际应用过程中,还存在一些挑战和问题,如精准导航、多模态感知、人机协同等。
因此,我们要不断提升对智能小车的研究和开发,使其更好地适应实际应用需求。
总之,智能小车是一种具有广阔应用前景和重要意义的智能机器人。
通过参与智能小车比赛,我对智能小车的自主导航、学习、决策等方面有了更深刻的认识和体会。
我相信,在不久的将来,智能小车将成为我们生活和工作中不可或缺的智能伙伴。
基于单片机的WiFi智能小车设计
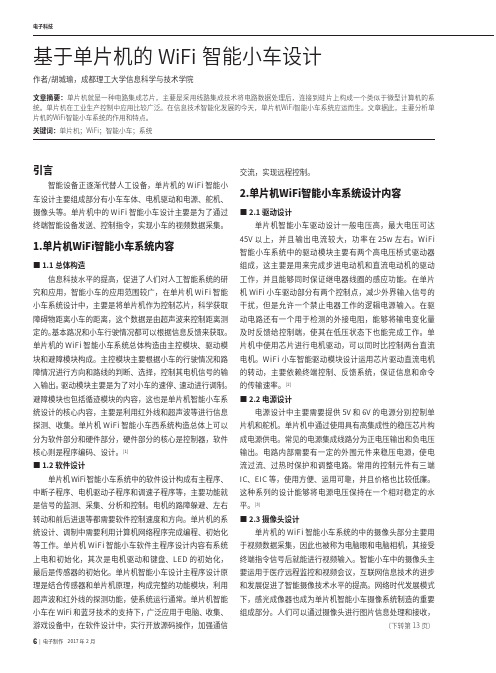
基于单片机的WiFi智能小车设计作者/胡城瑜,成都理工大学信息科学与技术学院文章摘要:单片机就是一种电路集成芯片,主要是采用线路集成技术将电路数据处理后,连接到硅片上构成一个类似于微型计算机的系统。
单片机在工业生产控制中应用比较广泛。
在信息技术智能化发展的今天,单片机WiFi智能小车系统应运而生。
文章据此,主要分析单片机的WiFi智能小车系统的作用和特点。
关键词:单片机;WiFi;智能小车;系统引言智能设备正逐渐代替人工设备,单片机的WiFi智能小车设计主要组成部分有小车车体、电机驱动和电源、舵机、摄像头等。
单片机中的WiFi智能小车设计主要是为了通过终端智能设备发送、控制指令,实现小车的视频数据采集。
1.单片机WiFi智能小车系统内容■1.1总体构造信息科技水平的提高,促进了人们对人工智能系统的研究和应用,智能小车的应用范围较广,在单片机WiFi智能小车系统设计中,主要是将单片机作为控制芯片,科学获取障碍物距离小车的距离,这个数据是由超声波来控制距离测定的。
基本路况和小车行驶情况都可以根据信息反馈来获取。
单片机的WiFi智能小车系统总体构造由主控模块、驱动模块和避障模块构成。
主控模块主要根据小车的行驶情况和路障情况进行方向和路线的判断、选择,控制其电机信号的输入输出。
驱动模块主要是为了对小车的速停、速动进行调制。
避障模块也包括循迹模块的内容,这也是单片机智能小车系统设计的核心内容,主要是利用红外线和超声波等进行信息探测、收集。
单片机WiFi智能小车西系统构造总体上可以分为软件部分和硬件部分,硬件部分的核心是控制器,软件核心则是程序编码、设计。
[1]■1.2软件设计单片机WiFi智能小车系统中的软件设计构成有主程序、中断子程序、电机驱动子程序和调速子程序等,主要功能就是信号的监测、采集、分析和控制。
电机的路障躲避、左右转动和前后进退等都需要软件控制速度和方向。
单片机的系统设计、调制中需要利用计算机网络程序完成编程、初始化等工作。
多功能遥控小车
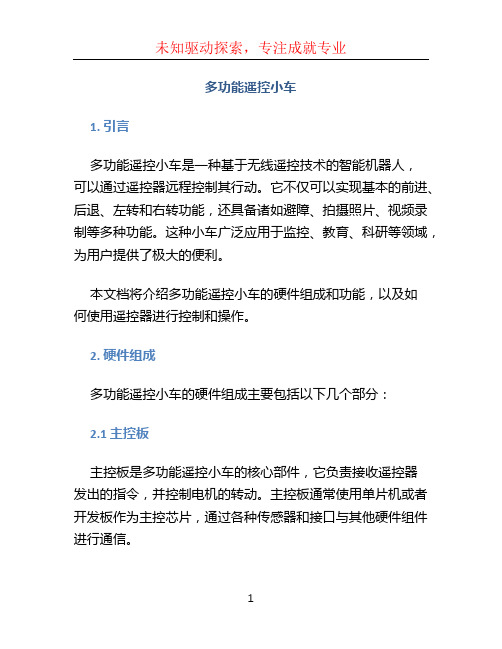
多功能遥控小车1. 引言多功能遥控小车是一种基于无线遥控技术的智能机器人,可以通过遥控器远程控制其行动。
它不仅可以实现基本的前进、后退、左转和右转功能,还具备诸如避障、拍摄照片、视频录制等多种功能。
这种小车广泛应用于监控、教育、科研等领域,为用户提供了极大的便利。
本文档将介绍多功能遥控小车的硬件组成和功能,以及如何使用遥控器进行控制和操作。
2. 硬件组成多功能遥控小车的硬件组成主要包括以下几个部分:2.1 主控板主控板是多功能遥控小车的核心部件,它负责接收遥控器发出的指令,并控制电机的转动。
主控板通常使用单片机或者开发板作为主控芯片,通过各种传感器和接口与其他硬件组件进行通信。
2.2 电机电机是多功能遥控小车的动力源,主要用于控制车轮转动。
通常情况下,多功能遥控小车会使用两个直流电机,通过调整电机的速度和转向来实现车辆的前进、后退、左转和右转等功能。
2.3 传感器多功能遥控小车还可以配备各种传感器,用于实现更多的功能。
常见的传感器包括超声波传感器、红外线传感器、摄像头等。
超声波传感器可以用于避开障碍物,红外线传感器可以用于检测周围的物体,摄像头可以用于拍摄照片和录制视频。
2.4 遥控器遥控器是多功能遥控小车的外部控制设备,用于发送指令给主控板,控制车辆的行动。
遥控器通常由按键和信号发射器组成,用户可以通过按下不同的按键发送不同的指令。
3. 功能介绍多功能遥控小车具备以下几种基本功能:3.1 前进、后退、左转和右转通过遥控器发送相应指令,多功能遥控小车可以实现前进、后退、左转和右转的基本动作。
用户可以根据需要控制小车的行驶方向和速度。
3.2 避障功能多功能遥控小车可以配备超声波传感器或红外线传感器,用于避开障碍物。
当传感器检测到前方有障碍物时,小车将自动停止或改变方向,避免与障碍物发生碰撞。
3.3 拍照功能多功能遥控小车还可以配备摄像头,用户可以通过遥控器发送指令,让小车拍摄照片。
拍摄的照片可以通过无线网络传输到手机或电脑上进行查看和存储。
智能小车教程(硬件)

传感器不工作或误动作
02
检查传感器的接线和灵敏度设置,调整传感器的位置和方向。
电源不稳定或电量不足
03
检查电源的接线和电压是否稳定,更换电池或适配器。
04 传感器应用与编程实践
红外线传感器原理及应用
红外线传感器工作原理
通过发射红外线并检测反射或遮挡情况来感知外界物体 。
红外线传感器选型及接口电路
发展历程
随着计算机技术、传感器技术、通信 技术等的发展,智能小车经历了从简 单遥控到自主导航、从单一功能到多 功能集成的发展历程。
智能小车应用领域
科研教育
物流仓储
智能小车作为移动机器人的一种,常被用 于科研实验和教学演示,帮助学生理解自 动控制、人工智能等原理。
智能小车可应用于仓库、机场等场景的物 流运输,实现自动化搬运、分拣等功能, 提高物流效率。
结构件
选择适合小车的结构件,如底 盘、轮子、支架等。
组装流程详解
搭建底盘
安装控制器
连接电源
调试传感器
将轮子安装在底盘上, 并固定好支架和电机。
将控制器固定在底盘上, 并连接好电机和传感器。
将电源与控制器连接, 确保小车可以正常供电。
根据需要调试传感器的灵 敏度和方向,以实现小车 的避障、寻迹等功能。
电源模块
为智能小车提供稳定的电源供应, 通常采用电池或充电模块。
控制器
智能小车的核心部件,负责处理传 感器数据、控制执行器动作,通常 采用单片机、DSP等处理器。
通信模块
实现智能小车与上位机或其他设 备之间的无线通信,如蓝牙、 WiFi等模块。
02 智能小车核心硬件介绍
主控板选型及功能
01
02
03
Wifi机器人

思路简单,但是创意无限~~/********************************************************* *****************/动手能力超强牛人教你做Wifi机器人(图)一、前言Wifi机器人(Wifi Robot):其实是一辆能通过互联网,或500米以外的笔记本无线设施来远程控制的遥控汽车。
由于在车上配备了一个网络摄像头,因此在视野范围之外都能够遥控该车,此外,车上还装了一个喇叭,您可以远程朝人们按喇叭。
我发现Linksys WRT54GL路由器非常的hacker-friendly(黑客友好),它运行Linux和一些已经被反向工程(reverse engineered)了的硬件。
世面上有一大批针对这种路由器的固件版本(firmware version)可供选择,本项目用到的版本是可订制化的Linux firmware Open-WRT。
有了路由器的相关软件,对一大堆硬件进行改装也变得可能。
因此,既然有这样一个廉价的、可改装的、嵌入式Linux系统可以随我所用——我知道我能做件很酷的事情,于是,Wifi机器人的想法诞生了。
本文的目的是提供一个该项目的概览,同时也列出了一些相关软件和电子产品的实施细节,但它并不是一个一步一步详细介绍如何制作Wifi机器人的手册,不过,那些具备一定电子和软件知识的人根据本文提供的信息也能够做出自己的Wifi机器人。
我已经遵循GNU GPL v2发布了所有的源代码,因此,希望大家都来用这个源码,并尽量去完善它!二、硬件部分2.1 汽车在汽车上增加网络摄像头、路由器、沉重的电池、额外的电路,以及一大堆的电线会大大超出汽车原本设计的载重量。
因此,考虑到这些额外要加的重量,您需要找到一个超大型的遥控汽车。
旧货店常常有一些遥控车卖,价格3到5美元不等(不包括遥控器),我已经买了许多这样的汽车以供使用。
您最好选择那些体积大于或等于现实生活中真车体积1/10的玩具遥控汽车,体积太小的就不要考虑了。
2代WiFi遥控智能小车使用说明书

2.3.2 本地模式(本地局域网)
这种本地模式有三个点 ESP8266 开发板+当地 WiFi 路由中转+手 机组成一个小局域网。也就是说 ESP8266 开发板通过 WiFi 路由器中 转后连接到手机中进行通信的。
2.2 微信控制小车
在 2.1 节中 ESP8266 开发板在页面参数配置成功的前提下,扫描 下述二维码并可关注四博智联的微信公众号。
图 8 四博智联微信二维码
然后在微信上会显示“您好,设备绑定成功”,然后点击手机微 信的右下角“我的设备”,
图 9 微信绑定
6
深圳四博智联科技有限公司 Shenzhen Doctors of Intelligence & Technology (DOIT)
图 5 电脑 WiFi 信号
3
深圳四博智联科技有限公司 Shenzhen Doctors of Intelligence & Technology (DOIT)
http://www.doit.am https:/// Tel: 186 7666 2425, QQ:123433772
深圳四博智联科技有限公司 Shenzhen Doctors of Intelligence & Technology (DOIT)
http://www.doit.am https:/// Tel: 186 7666 2425, QQ:123433772
深圳四博智联科技有限公司
图 11 微信控制小车界面
一种基于WiFi通信网络的智能小车

一种基于WiFi通信网络的智能小车作者:张翔宇来源:《中国新通信》 2015年第18期张翔宇黑龙江省实验中学【摘要】一种基于WiFi 通信网络的智能小车,智能小车由WiFi 模块控制器、电机驱动器、减速电机、电池组、开关、上位机控制界面所组成。
智能小车通过上位机的操纵界面利用无线网络任意的控制小车的行走路线。
【关键词】智能小车 WiFi 通信 Arduino 智能控制一、引言随着时代的发展,无线网络得到了迅速的发展,利用无线技术所制造的无线终端产品也越来越多。
由于本人对于电子产品有着非常浓厚的兴趣,所以利用课余时间通过学习制作了一个基于WiFi 通信网络的智能小车,能够实现通过上位机界面控制智能小车的运动。
二、智能小车工作过程一种基于WiFi 通信网络的智能小车,智能小车由WiFi模块控制器、电机驱动器、减速电机、电池组、开关、上位机控制界面所组成,当智能小车上电后,WiFi 模块会自动寻找在控制器程序中所设定要连接的无线网络名称,当WiFi模块连接到上位机控制界面时,控制界面会显示当前所连接到主机的WiFi 模块的IP 地址,建立起通信连接之后,就可以通过上位机界面控制WiFi 小车任意的运动了,智能小车的控制器我选择的是基于Arduino 的wido 控制器,其本身自带WiFi 模块,并带有AVR 单片机,具有6 路数字可控IO 口,4 路模拟IO 口,最大限度的满足了控制系统的需要,同时Arduino 有大量封装好的类库,语言也不像C 语言不易理解,它非常适合初级电子玩家制作一些电子产品。
三、系统数据的处理上位机和智能小车之间的通信利用的是TCP/IP 协议,TCP/IP 是一种网络通信协议,它规范了网络上的所有通信设备,尤其是一个主机与另一个主机之间的数据往来格式以及传送方式。
TCP/IP 是INTERNET 的基础协议,也是一种电脑数据打包和寻址的标准方法。
在数据传输中,可以形象地理解为有两个信封,TCP 和IP 就像是信封,要传递的信息被划分成若干段,每一段塞入一个TCP 信封,并在该信封面上记录有分段号的信息,再将 TCP 信封塞入IP 大信封,发送上网。
WiFi在AGV小车中的应用

WiFi在AGV小车中的应用工业设备在实际应用时,很多情况并不是固定位置不动的,且设备还需实时接入网络,即使采用无线连接也存在覆盖范围等问题,下面看看我们如何解决。
在工业现场的各个领域,譬如AGV导引运输车、大型机床、仪器仪表、工程机械等均需进行实时联网,而其中的不少应用,均是移动操作的,而非固定,比如AGV引导运输车就需移动工作,并通过Wi-Fi实时联网,穿梭于大型厂房等复杂的环境,这时对于Wi-Fi连接的连续性就有了很高的要求。
多个热点间的切换如何实现?通常工业现场的工作区面积较大,一般采用分布式的Wi-Fi热点方案,如果设备需在工作区域内实时联网,必须在这些热点间无缝切换,WiFiCOM系列产品集成节点快速漫游技术,可实现在多个热点间快速自动切换,在Wi-Fi信号覆盖区域内,用户设备可随处移动,并保持无线网络畅通,不受单点Wi-Fi覆盖范围的限制,该功能在工业现场的非固定式设备联网提供了有效的解决方案。
一站式的工业Wi-Fi应用解决方案目前工业领域Wi-Fi模块产品的性能良莠不齐,差异巨大,如何挑选一款稳定可靠的Wi-Fi模块成为许多工程师的难题。
那么,目前全球最大的Wi-Fi方案厂商——博通(Broadcom)成为了我们必然之选,这为模块的可靠性奠定了坚实的基础,这也将是您的必然之选!优越的通信距离和穿墙能力设备针对复杂的工业环境设计,天线的匹配设计均经过严格的测试验证,信号质量得到极致的优化,有效加强信号的强度及穿透力,多重保障让联网设备信号无阻,完美体验信号满格! WIFICOM视距通信距离超过120m。
且产品重点突破了Wi-Fi时断时续、有连接无数据、穿墙能力差、环境适用能力不强等难题RS-232/485二合一,高速传输不丢帧WIFICOM采用RS-232/485二合一串行接口设计,用户可将自己产品的RS-232/485接口拓展成Wi-Fi连接,使设备快速接入Wi-Fi网络,模块默认采用串口透明传输模式,相当于建立了一段无形的串行传输线,串口速率可高达921600bps。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
WIFI智能小车机器人作者:福建师范大学协和学院陈洋斌叶志燕沈渊指导教师:钟伟雄林民庆作品简介在平常的生活中,我们经常会见到有人在玩遥控车,甚至现在还有了遥控飞机。
这一切在过去那些年都还只是人们眼中孩子们的玩具而已,然而随着科技的发展,关于机器人的电影,或者是现实生活中科学研究者研发出来的仿生机器人经常在各种媒体中不断的报导。
这毫无疑问,再过个几十年,机器人将走进我们的家庭中,它将为我们带来更多的便利。
如今,很多电子发烧友DIY出了各种版本WIFI机器人。
Wifi Robot,顾名思义就是通过wifi无线网控制的机器人,比起普通的遥控车,它的好处就是遥控信号覆盖范围可以做到很广。
WIFI智能小车机器人是一种基于WIFI的无线远程智能遥控机器人,利用非常成熟的WIFI无线网络为数据载体,实现控制数据,视频数据传送而达到控制小车和视频监控等等功能。
它是集无线通信、实时电机驱动、多向机械云台、视频监控、环境温度检测、为一体的多功能智能遥控车。
本系统在电脑端上位机采用QT编程,由于QT面向多平台,并且可移植性好。
通过QT编写的上位机,便可以把控制数据通过Socket发送到路由器,路由器再通过ser2net把数据包解开,然后转发到路由器的串口; 该系统的控制端采用STC15单片机作为微处理器,通过STC15单片机与路由器建立串口通信,便能利用路由器的串口数据进行控制电机的工作状态模式和三个陀机的工作角度。
STC15单片机还负责实时监控环境温度并经过路由器反馈至电脑,让使用者可以实时了解小车所在地的气温,以便于在到达目的地之前设定好空调温度等应用。
平台选型说明本设计使用本届大赛指定的单片机开发板(以STC15F2K61S2芯片为控制核心) 设计说明1、设计要求1.找一台能刷Linux的无线路由器,将其操作系统刷成OpenWrt。
2.将Linux下的摄像头驱动安装到路由器上。
3.选择PC端的上位机软件,利用上位机的Socket把特定的数据包发送到路由端。
4.选择机器人车体,并制作控制驱动板和机械手臂等安装在车体上。
5.通过上位机操作,直接控制小车行走和机械手臂摆动,并能实时接收到机器人上的摄像头视频。
2、根据本系统的设计要求先确定了整体设计原理框图如图所示:3、设计原理由图1 的原理框图,可知整个系统是电脑通过无线WIFI网络与路由器通讯,当路由器收到命令后将相应命令通过串口发送给单片机,单片机再根据命令执行相应的操作,如机器人行走,操作机械手等;或者单片机通过读取温度传感器的温度值,通过串口传给路由器,路由器再将数据传给电脑。
3.1单片机最小系统本系统的核心部分是单片机的控制,给以相应的编程命令,按照我们所要实现的功能意愿执行相应的操作,STC15F2K61S2的管脚图如图2所示:3.1.1 STC15F2K61S2单片机的特性1、超强抗干扰,超级加密;2、不需要外部晶振和复位电路的单片机;3、可省掉外部EEPROM,利用IAP技术;4、ISP/IAP,在线编程,无需编程器/仿真器;5、双串口,两个独立串口;6、高速10位A/D转换器,8通道;7、高速,可靠,1个时钟/机器周期80518、超低功耗,且抗干扰能力强。
3.2温度传感器模块本模块主要作用是进行温度采集,然后经采集的数据送入单片机STC89C52RC里进行分析处理。
在本次设计中采用了DS18B20作为数据采集器,它的精度最少可以精确到0.0625,完全可以用来进行环境温度的测量。
由DS18B20 这一特点,非常适合于多点温度检测系统,硬件结构简单,方便联网,在仓储管理、工农业生产制造、气象观测、科学研究以及日常生活中被广泛应用[8]。
温度传感器如下:3.3 路由器刷机本系统需要给路由器刷OPENWRT系统。
目前刷机大致有两种方法,一种是通过网线法进行刷机,另一种是通过TTL线进行刷机。
一般采用网线法刷机比较简单,不需要什么工具。
3.3.1网线法刷机法第一步:首先关闭路由器电源,网线连接电脑和路由器(DB120)的LAN4。
第二步:电脑IP设置为192.168.1.X/255.255.255.0(X为2-255之间的任意数字),网关不用设置。
第三步:用针状物按住路由器的RST键,然后打开路由器电源,等待大概10秒钟,路由器的电源灯会变成红色,此时可松开复位按键。
第四步:运行电脑端的cmd.exe,然后输入ping 192.168.1.1,测试是否能ping通。
第五步:打开电脑浏览器输入192.168.1.1,会出现一个页面,选择要刷的OpenWrt固件,点击确定开始刷机,大概两分钟后路由器会自动重启,至此说明路由器刷机完成。
3.3.2 TTL线刷机法第一步:1.网线连接电脑和路由器(DB120)的LAN4,电脑IP设置为192.168.1.X/255.255.255.0(X为2-255之间的任意数字),网关不用设置;第二步:用USB-TTL线接好路由的GND、RXD、TXD三条线(VCC不要接)。
第三步:打开putty,选好端口号,端口号要查看电脑设备管理器,波特率设置成115200。
第四步:路由器通电,接线且设置正确的话,putty窗口应该出现路由器的信息。
第五步:在通电3秒内,按下键盘的空格键,阻止路由器CFE启动,这时候应出现CFE>。
第六步:输入小写e a,e a之间有个空格键,回车,然后在按下y,回车,路由器会清除原来系统固件,类似电脑格式化全盘功能。
第七步:清空之后,路由会持续输出很多命令行,且不会停止,直接关掉路由电源。
第八步:重新打开路由电源,通电3秒内按下空格键阻止CFE启动。
第九步:打开浏览器,输入192.168.1.1,按提示上传固件文件就可以了。
3.4 让路由器上网刷完路由器后,接下来就要通过安装各种软件来扩展功能,而OpenWrt系统安装程序采用的是OPKG方式安装,也即在线安装,因此要保证路由器能连接上网络。
因此需要做如下设置,能通过以下设置后路由器也可以当普通的路由器来使用。
浏览器输入:192.168.1.1 进入路由器。
输入用户名:root ,密码:admin 进入路由器管理界面。
然后点击‘快速向导’进行设置,一直点击下一步,直到出现-配置WAN口。
首先选择好接入协议的方式:第一种:静态IP方式;第二种:DHCP,即自动获取IP方式;第三种:PPPOE拨号方式,即ADSL,目前家里用的基本以这个为主。
设置完成后,电脑如果能正常上网说明设置成功。
4.5 在路由器上安装程序4.5.1路由器挂载摄像头目前常用的USB摄像头分两种:有驱的和免驱的。
在本系统中使用的是有驱的,主控芯片为中星微301,此摄像头挂载成功率100%,并且性价比高,特别适合本系统的设计。
这里就以挂载ZL301摄像头为例来说明如何挂载摄像头。
1、挂载摄像头前首先要保证路由器能上网;2、登陆路由WEB管理:系统——软件包——编辑软件包列表和安装对象——将改成/xwrt3、使用工具PUTTY登录路由器,输入以下命令。
root@OpenWrt:~# opkg updateroot@OpenWrt:~# opkg install kmod-i2c-coreroot@OpenWrt:~# opkg install kmod-video-coreroot@OpenWrt:~# opkg install kmod-usb-videoroot@OpenWrt:~# opkg remove kmod-usb-videoroot@OpenWrt:~# opkg install kmod-usb-videoroot@OpenWrt:~# opkg install kmod-video-gspca-coreroot@OpenWrt:~# opkg install kmod-video-gspca-zc3xx到此摄像头已经挂完,输入以下命令看看是否挂上。
root@OpenWrt:~# dmesg | grep usb…usb 2-1: USB disconnect, address 2usb 2-1: new full speed USB device using bcm63xx_ohci and address 3usb 2-1: configuration #1 chosen from 1 choiceusbcore: registered new interface driver zc3xx看到最后一行,说明已经挂上。
4.5.2安装MJPEGMJPEG作为一个小型的视频服务器软件,对系统消耗非常小,也很适合本系统设计。
1、安装MJPEG使用如下命令安装:Opkg install mjpg-strcamer2、启动MJPEG/etc/init.d/mjpg-streamer start3、查看图像由于火狐浏览器支持动态刷新,因此需要下载安装火狐浏览器。
在地址栏输入:http://192.168.1.1:8080/?action-stream 可查看到摄像头的动态视频。
4.6 PC端与机器人建立通讯4.6.1单片机与路由器的通讯单片机与路由器的通讯是通过串口进行的,这个原理与单片机与电脑的通讯是一样的。
因此我们首先将路由器换成电脑,通过串口调试助手来发送命令。
这里需要一个USB转串口的工具。
第一步:将USB转串口工具的驱动在电脑安装好。
第二步:将单片机的串口与USB转串口工具连接好,只需连接三根线即可(RX、TX、GND)。
第三步:打开串口调试助手,设置好串口配置,一般有端口、波特率、数据位、停止位等。
第四步:向单片机发送命令。
并且测试单片机接收到不同的命令时I/O口的电平是否有发生变化。
如果有按单片机程序设计的要求发生了相应变化,则说明通讯成功。
4.6.2 PC端与路由器的通讯本次使用的工具是网络调试工具TCP&UDP-Debug。
主要用于与路由器建立Sockey通讯。
第一步:保持4.3.1的连接不变,将电脑与路由器建立连接(无线或是网线)。
首先要保证电脑可以PING的通路由器。
第二步:打开TCP&UDP-Debug软件,右键选择CreateConnection,并填写参数。
第三步:填写完参数后,点击Create。
第四步:点击connect,与路由器建立连接。
第五步:向路由器发送命令,查看串口调试助手是否收到相应的数据。
若能成功接收,说明整个通讯过程是正常的。
4.7 机械手臂控制原理本系统采用的是4自由度的机械手臂,它是由金属支架、舵机、螺丝轴承、机械爪子等组合成的。
将机械手臂组装完成之后,其实最重要的部分就是如何控制舵机了,控制舵机的转动的角度,也就能够控制机械手臂的摆动了。
本系统采用的是辉盛MG995,工作电压为3~7.2V,工作扭矩为13KG/cm,转动角度为0~180°。