2010年福建省省电子设计大赛——简易射门机器人 论文
2010年福建省电子竞赛题目

程控放大滤波器( A 题)【本科组】一、任务设计并制作一个程控放大滤波器,其组成如图1所示。
图中放大器增益可设置;低通或高通滤波器通带、截止频率等参数可设置。
图1 程控放大滤波器组成框图二、要求1. 基本要求(1)放大器输入正弦信号电压振幅为10mV,电压增益为48dB,增益6dB步进可调,通频带为100Hz~50kHz,放大器输出电压无明显失真。
(2)滤波器可设置为低通滤波器,其-3dB截止频率f c在1kHz~25kHz范围内可调,调节的频率步进为1kHz,2f c处放大器与滤波器的总电压增益不大于40dB,R=1kΩ。
L(3)电压增益与截止频率的误差均不大于10%。
(4)有设置参数显示功能。
2. 发挥部分(1)放大器电压增益为60dB,输入信号电压振幅为10mV;增益6dB步进可调,电压增益误差不大于5%。
(2)滤波器可设置为高通滤波器,其-3dB截止频率f c在1kHz~25kHz范围内可调,调节的频率步进为1kHz,0.5f c处放大器与滤波器的总电压增益不大于40dB,截止频率设置误差不大于5%,R L=1kΩ。
(3)制作一个简易幅频特性测试仪,其扫频输出信号的频率变化范围是100Hz~200kHz,频率步进1kHz。
(4)用自制简易幅频特性测试仪自动测量放大器通频带(放大器设置在适当增益档)、低通滤波器和高通滤波器的截止频率f c,并显示测试数据。
(5)其他。
三、说明设计报告正文应包括系统总体框图、核心电路原理图、主要流程图和主要的测试结果,篇幅限制在6页。
完整的电路原理图、重要的源程序和完整的测试结果可用附件给出。
四、评分标准简易射门机器人( B 题)【本科组】一、任务设计制作一个简易机器人,不能使用外接电源,机器人在设定的场地范围内行动,能在指定区域内寻找到乒乓球,并进行射门动作,但机器人不能超越球门区线。
球门中心上方20cm处有25W白炽灯指示;场地内有5名防守者,其中三名防守者位置固定(如图所示),两名防守者可以随机摆放;乒乓球放置在铁环的圆心处,并可以随机摆放在球门区线、EF区间隔线和球门中心两条放射线所围成的区域内,场地如图所示:二、要求1、基本要求(1)机器人从出发区域开始启动,能自动确定自身大体坐标位置(如A2,B4等)。
机器人电子设计竞赛论文
序号:编码:2011年第二届机器人电子设计大赛作品论文论文名称: 2011年第二届机器人电子设计大赛院系全称:电气工程学院申报者姓名:崔振男(集体名称):傲视群雄目录第一章前言 (2)第二章设计分析 (4)2.1分析要求 (4)2.2 总体分析 (4)第三章硬件设计 (6)3.1 小车布局 (6)3.2 显示按键电路设计 (8)3.3 测速电路设计 (9)3.4 电机驱动电路设计 (9)第四章调试 (10)1 软件调试 (10)2 硬件调试 (10)设计感言 (11)参考文献 (12)附录(一) (13)附录(二) (14)附录(三) (18)第一章前言论文深入研究了ZigBee网络技术,在考察和比较目前我国矿井生产现状的基础上,得出了ZigBee技术用于矿井人员管理的可行性与优势。
在做了上述调研工作后,提出了基于ZigBee技术和CAN总线技术的矿井人员管理系统的总体方案。
整个系统通过ZigBee网络实现矿井人员的考勤管理和实时定位,通过CAN总线方式将井下ZigBee无线网络采集到的信号强度、人员信息以及环境参数及时地传送到地面监控中心,监控中心对取得的数据进行处理并将井下人员在各个巷道的动态分布以及每个矿工的运轨迹显示在Gls地图上,实现对矿井人员的实时管理。
在矿井人员定位时,论文通过对多种定位技术的比较,结合煤矿井下的实际环境和定位要求,选择了基于RSSI的定位技术。
关键词:ZigBee技术;矿井人员管理;人员定位;CAN总线;RSsAbstractThe paper has depth studied of the ZigBee network technology, in the study and comparison of the current status of China's mine production, based on ZigBee technology for mine obtained the feasibility and advantages of personnel management.In doing the above research work is proposed based on ZigBee technology and CAN mines the overall program technology of personnel management system.ZigBee networks through the entire system of mine management and real-time attendance officer position, way underground through the CAN bus collected ZigBee wireless network signal strength, personnel information, and environment parameters in a timely manner to send to the ground control center, monitoring center of the data obtainedprocessing and tunnel underground personnel in all the dynamic distribution and transport path for each miner on a map displayed on the Gls achieve real-time management of the mine personnel.Positioning in the mine workers, the paper by comparing a variety of positioning technologies, combined with the actualcoal mine environment and positioning requirements, select the RSSI-based positioning technology.Keywords: ZigBee technology; mine personnel management; personnel positioning; CAN bus; RSs第二章设计分析2.1分析要求1、基本要求(1)机器人从起点出发,自动将木箱逐一运送到库房内(允许倒车)。
2010年福建省职业院校技能大赛(高职组)获奖名单
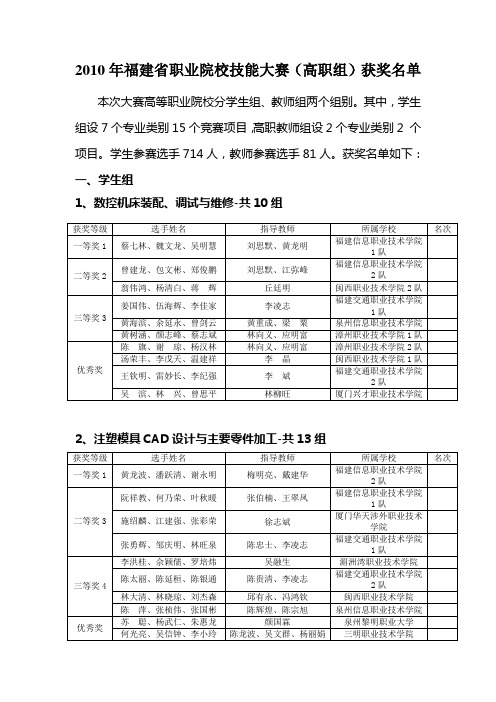
2010年福建省职业院校技能大赛(高职组)获奖名单本次大赛高等职业院校分学生组、教师组两个组别。
其中,学生组设7个专业类别15个竞赛项目,高职教师组设2个专业类别2 个项目。
学生参赛选手714人,教师参赛选手81人。
获奖名单如下:
一、学生组
1、数控机床装配、调试与维修-共10组
2、注塑模具CAD设计与主要零件加工-共13组
3、机器人-共11组
4、电子产品设计及制作-共31组
5、产品售后服务跟踪系统-共26组
6、工程测量-共23组
7、企业沙盘模拟经营-共25组
8、数学建模-共25组
9、计算机网络组建与安全维护-共20组
10、汽车维修与故障排除-共6组
11、现代物流—储配方案的设计与执行-共11组
12、复杂部件造型、多轴联动编程与加工-共7组
13、嵌入式产品开发-共8组
14、楼宇智能化系统安装与调试-共9组
15、零部件3D测量与制造-共4组
二、高职教师组:
1、注塑模具CAD设计与主要零件加工-共11组
2、电子产品设计及制作-共16组。
2011全国电子设计大赛论文-G题(此作品获全国二等奖)

赛区:江西赛区赛区编号:JXB13003 测试人签字:简易电阻测量仪(G题)摘要:随着电子工业的发展,电子元器件急剧增加,电子元器件的的适应范围越来越广泛,而且智能化逐渐替代旧版产品,在应用中我们常常要测量电阻的大小,因此设计更加可靠,安全,快捷的电阻测量仪,具有极大的现实必要性。
本系统由STC89c55单片机作为数据处理和控制核心,通过单片机,经过待测电阻Rx 后,由仪表放大器OP07采样并放大Rx两端电压,再经TLC2543转换送回单片机,进行欧姆定律处理计算,并在12864液晶上显示。
该测量仪可直接从LCD液晶上读出所测得的电阻值,测量范围为1Ω~10MΩ测量精度高达±1%,通过单片机的计算测量结果,并通过12864LCD液晶屏显示数据。
从而实现电阻的测量和显示。
通过实际检测,不仅测量简便,读数直观,且测量精度、分辨率也高于一般电桥。
关键词:STC89c55单片机 TLC2543 AD转换 LCD液晶屏运放OP071 方案选择与论证1.1 电阻测试方案比较电阻测试仪的比较可有多种方案完成,例如利用模拟电路,电阻可用比例运算器法和积分运算器法,电桥检测法.方案一:可编程逻辑控制器(PLC) 应用广泛,它能够非常方便地集成到工业控制系统中。
其速度快,体积小,可靠性和精度都较好,在设计中可采用PLC对硬件进行控制,但是用PLC实现价格相对昂贵,因而成本过高,且对其应用较生疏。
方案二:采用RC振荡回路,通过测量频率来计算相应的阻值,测量范围较宽,但振荡回路受外界干扰较大,测量精度较低,测量误差不易控制。
方案三:采用恒压源分压法,通过测量电压值,采用电压比例计算R值,该方案电路稳定,受外界影响小,测量精度高,且范围较宽,另一方面便于使仪表实现自动化,而且设计时间短,成本低,可靠性高。
综上所述,系统将采用方案三,采用恒压源分压法,更为简便可行,节约成本。
1.2 AD转换方案方案一:采用ADC0832ADC0832是串行接口的8位A/D转换器,双通道A/D转换,输出输入电平与TTL/CMOS 相兼容,最高转换时间为32US,体积小,使用简单,价格便宜,但分辨率较低,难以满足测量需求。
2010年福建省青少年电子制作锦标赛竞赛规则[1]
![2010年福建省青少年电子制作锦标赛竞赛规则[1]](https://img.taocdn.com/s3/m/5957ac492e3f5727a5e96262.png)
2010年福建省青少年电子制作锦标赛竞赛规则一、电子百拼图竞赛规定(一)电子百拼图现场拼装竞赛:1、小学组为3个指定电路、2个创新电路;2、初中组为3个指定电路、3个创新电路;(二)判断百拼图拼装、创新正确与无效的规定:1、选手在现场宣布的各规定时间内,逐一独立完成各种指定电路。
2、选手每正确完成一种电路(通过声、光、电等效果判断),由裁判员现场计时(计时精确到秒)3、凡不能按题意显示效果或能显示效果,但属下列条款之一者,其成绩无效,该题完成时间为指定完成时间再加5分钟;(1)未采用指定器材或零配件的参赛者;(2)拼装不平整、层次混乱,非指定器材在底板上出现;(3)无底板拼装或连接点超出底板;(4)元器件的极性颠倒或配件不全;(5)拼装层次超过三层(创新拼装和创新设计除外);(6)未用子母扣连接或子母连接不牢固影响电路正常工作;(7)导线或元器件在相邻层交叉;(8)合上开关,电路需调整或调试后才能显示功能;(9)计时生效再次触动、更改或增减拼装板上的零件;(10)主动或被动给予或接受别人帮助;(11)不服从裁判,又不按申诉程序提出申诉,且严重影响竞赛进行者;(12)违反竞赛其它相关规定者。
二、电子小拼装竞赛规定(一)电子小拼装现场拼装竞赛如下:1、小学组为2个指定电路、1个创新电路(提供参考电路图)。
2、初中组为2个指定电路、2个创新电路(只提供原理图)。
(二)判断小拼装正确与失效的规定:1、工艺评分办法:发光二极管、三极管和集成电路引脚弯曲拱起、跨距大于两格、元器件引脚交叉等每处加10秒。
收音机磁棒不能自由移动、元器件参数与电路图不符等每处加30秒;2、规定时间内没有按时完成或没有效果的,其完成时间为指定时间再加5分钟。
在规定时间内完成的要经过振动电路板来确定效果;振动电路板,失效或效果不稳定的时间加30秒;3、凡属下列条款之一者,其完成时间为该题指定指定时间再加5分钟:(1)未采用指定器材的参赛者;(2)主动或被动给予或接受别人帮助;(3)不服从裁判,又不按申诉程序提出申诉,且严重影响竞赛进行者;(4)违反竞赛其它相关规定者。
全向移动功能的篮球机器人的机械系统设计毕业论文
全向移动功能的篮球机器人的机械系统设计毕业论文目录绪论 (1)0.1 移动机器人现状与技术水平 (1)0.2 移动机器人机构研究概况 (1)0.3毕业设计来源及参赛意义 (2)0.4毕业设计的设计方法、主要任务及目标 (2)1 全维轮移动篮球机器人机械系统设计整体方案 (4)1.1机器人整体结构方案 (4)2 移动平台设计 (7)2.1移动机器人的运动方式 (7)2.1.1差动运动方式 (7)2.1.2全运动方式 (8)2.1.3选择全向运动方式 (8)2.2 全向轮的选择 (9)2.2.1 全向轮的介绍: (9)2.2.2全向轮的选型 (10)2.3电动机的选择 (12)2.3.1 直流电机的选取与计算 (13)2.4其他部件的选择校核 (17)2.4.1电机支撑架的选择 (17)2.4.2轴承的选择及校核 (17)2.4.3底盘设计 (18)2.4.4阶梯轴的设计 (18)2.5电机与轮的装配 (19)3 捡球机构的设计 (20)3.1电机的选择及计算 (20)3.1.1所需转矩计算 (20)3.2 齿轮的选择及校核 (22)3.3 插架的设计 (23)3.4 传动轴的设计 (24)3.5捡球机构装配 (25)4 弹射机构设计 (26)4.1 投篮速度的选取与计算 (26)4.2气缸的选择 (27)4.3 导行架的设计 (28)4.3弹射机构的装配 (29)5 全维轮移动篮球机器人机械结构装配及总结 (30)5.1 全维轮移动篮球机器人机械结构 (30)5.2设计总结 (31)参考文献 (33)致谢 (34)绪论0.1 移动机器人现状与技术水平机器人的最初形式是工业机器人,它能有效的提高产品的质量和改善人们的劳动条件,在焊接装配、浇铸、喷漆等方面得到了广泛应用。
工业机器人通常为多关节的机械手臂,本体不具有可移动性,因而工作环境相对来说是固定的,其灵活性只表现在可以按照人们的要求反复编程实现不同的运动。
机器人技术论文六篇
机器人技术论文六篇机器人技术论文范文1机器人技术教育是指围绕机器人而开展的教与学活动,幼儿到成人都可以是教育对象,它以多视角、多样化的教学模式,达到寓教于乐的教育目的。
机器人技术教育的内容,并不受限于传统的教学模式。
以机器人作为教学活动的载体,不仅可以使教学具有科技含量,提升同学的学习爱好,还能培育同学的创新精神、综合实践力量和协作力量。
当然,在近年来的各类科技活动项目中,与机器人有关的项目不算许多,关于机器人的创新教学,还处于初级阶段。
因此,探究怎样通过机器人教学提高同学的创新力量,是现阶段最迫切需要解决的问题之一。
1.机器人技术教育的意义提升同学的创新力量创新力量作为一个国家、民族进步和富强的动力,在当今社会,其价值不言而喻。
我国的传统应试教育模式已被质疑多年,每年培育出的人才虽然在数量上远超西方一些国家,但其质量参差不齐,尤其是在创新力量方面不能尽如人意。
尽管近几年始终在提倡素养教育,却仍旧无法转变现状。
因此,同学创新力量的培育至关重要。
随着机器人教育活动日益普及,它在培育青少年制造力过程中凸显的优势已受到各界关注。
机器人教育围绕同学因材施教,老师只扮演引导者的作用,传授最基本的理论学问,剩下的需要同学通过动手实践来猎取新的学问和信息。
对于一些问题,同学必需给出自己的创新解决方案,这样可以培育同学的制造性思维力量。
2.提高同学的学习动机和爱好爱因斯坦说过:“对一切来说,只有喜爱才是最好的老师,它远远赛过责任感。
”这表明白爱好的培育对于学习的重要性。
由于有爱好,所以会专注,同学学习效率的凹凸在很大程度上取决于是否有学习爱好。
机器人技术可以提高同学的学习爱好,并转变传统的教育模式和理念,以玩带学,在消遣中、在奇怪心的驱使下,让同学主动去学习。
3.增加团队合作意识机器人竞赛活动所需要的学问相当广泛,完成这个任务需要让同学分成组,由组内成员一同探究学习。
假如某一成员有了新发觉,大家可以一起共享、争论、协商,共同进步和学习,组与组之间进行比拼。
2010年福建省职业院校技能大赛(高职组)获奖名单
2010年福建省职业院校技能大赛(高职组)获奖名单本次大赛高等职业院校分学生组、教师组两个组别。
其中,学生组设7个专业类别15个竞赛项目,高职教师组设2个专业类别2 个项目。
学生参赛选手714人,教师参赛选手81人。
获奖名单如下:
一、学生组
1、数控机床装配、调试与维修-共10组
2、注塑模具CAD设计与主要零件加工-共13组
3、机器人-共11组
4、电子产品设计及制作-共31组
5、产品售后服务跟踪系统-共26组
6、工程测量-共23组
7、企业沙盘模拟经营-共25组
8、数学建模-共25组
9、计算机网络组建与安全维护-共20组
10、汽车维修与故障排除-共6组
11、现代物流—储配方案的设计与执行-共11组
12、复杂部件造型、多轴联动编程与加工-共7组
13、嵌入式产品开发-共8组
14、楼宇智能化系统安装与调试-共9组
15、零部件3D测量与制造-共4组
二、高职教师组:
1、注塑模具CAD设计与主要零件加工-共11组
2、电子产品设计及制作-共16组。
机器人论文6篇(最新)
一、人工智能的定义解读人工智能(Artificial Intelligence),英文缩写为AI,也称机器智能。
“人工智能”一词最初是在1956年的Dartmouth学会上提出的。
它是计算机科学、控制论、信息论、神经生理学、心理学、语言学等多种学科互相渗透而发展起来的一门综合性学科。
从计算机应用系统的角度出发,人工智能是研究如何制造智能机器或智能系统来模拟人类智能活动的能力,以延伸人们智能的科学。
人工智能是计算机科学的一个分支,它企图了解智能的实质,并生产出一种新的能与人类智能相似的方式做出反应的智能机器。
人工智能的发展史是和计算机科学与技术的发展史联系在一起的,目前能够用来研究人工智能的主要物质手段以及能够实现人工智能技术的机器就是计算机,人工智能在21世纪必将为发展国民经济和改善人类生活做出更大的贡献。
二、人工智能的发展历程事物的发展都是曲折的,人工智能的发展也是如此。
人工智能的发展历程大致可以划分为以下五个阶段:第一阶段:20世纪50年代,人工智能的兴起和冷落。
人工智能概念在1956年首次提出后,相继出现了一批显著的成果,如机器定理证明、跳棋程序、通用问题s求解程序、LISP表处理语言等。
但是由于消解法推理能力有限以及机器翻译等的失败,使人工智能走入了低谷。
这一阶段的特点是重视问题求解的方法,而忽视了知识的重要性。
第二阶段:60年代末到70年代,专家系统出现,使人工智能研究出现新高潮。
DENDRAL化学质谱分析系统、MYCIN疾病诊断和治疗系统、PROSPECTIOR探矿系统、Hearsay-II语音理解系统等专家系统的研究和开发,将人工智能引向了实用化。
并且,1969年成立了国际人工智能联合会议(International Joint Conferences onArtificial Intelligence 即IJCAI)。
第三阶段:80年代,随着第五代计算机的研制,人工智能得到了飞速的发展。
机器人论文——精选推荐
在这个学期里,我选择了机器人初级课程。
在这个课堂里,在理论与实践的结合中,我学到了很多东西!以前,总认为机器人充满了神秘感,现在总算明白了机器人的神秘所在!同时,也更深一步的了解了机器人的性能,原理等等,而且又更高一层的提高了我的动手能力。
第一堂课,通过老师的介绍,我们了解了机器人,并进行了组装Boe-Bot。
在随后的学习中,我们逐步了解并学会了宝贝机器人运行时的各种指令,掌握了机器人在运动过程中的各种原理!比如,在Boe-Bot编程沿着条纹带行走时,我们知道了,Boe-Bot靠近目标的距离比SetPoint更近,离开目标的距离比SetPoint更远,这同程序FollowingBoeBot.bs2的表现相反。
当Boe-Bot检测到目标不在SetPoint的范围内时,只需简单的更改Kpl和Kpr的符号使Boe-Bot向相反的方向运动。
换句话说,将Kpl 由-35改为35,Kpr由35改为-35另外,频率感测的利用也很广。
在Boe-Bot中,频率感测是Boe-Bot 使用IR LED 与传感器决定距离的方法。
使用FREQOUT 指令传出范围从37.5kHz(高灵敏度)到41.5kHZ(低灵敏度)的IR 讯号。
距离的测定是根据感测器能够在哪些频率下侦测到物体,哪些频率侦测不到。
因为频率的间隔不是定值,所以介绍了LOOKUP 指令,LOOKUP 指令储存一系列要使用的数值,随着FOR…NEXT 循环中index 的增加,把数值一一传进变量中。
控制系统在机器人的运行之中是必不可少的重要部分。
闭回路控制中的proportional control 是将误差值乘上一个比例常数作为系统的输出,误差值来自测量值减去设定值,对于Boe-Bot 而言,不管是输出值或是设定值都是类似距离的一种形式。
BASIC Stamp 使用PBASIC 程序来处理两侧伺服机与传感器的控制回路。
回路控制中执行了侦测距离、再送出脉冲前调整输出的脉冲值,让Boe-Bot 对物体的运动作出适当的响应。
简易机器人课程设计报告

机械电子工程系机电综合课程设计报告设计题目姓名:班级:学号:时间:一、绪论 (3)二、主要研究内容(示例) (3)2.1 机械实体设计 (3)2.1.1 零件图设计 (3)2.1.3 总装图 (6)2.2 机械系统控制 (6)2.3 系统硬件设计 (8)三、结论 (10)四、参考文献 (10)一、绪论随着世界第一台工业机器人1962年在美国诞生,机器人已经有了三十多年的发展史。
三十多年来,机器人由工业机器人到智能机器人,成为21世纪具有代表性的高新技术之一,其研究涉及的学科涵盖机械、电子、生物、传感器、驱动与控制等多个领域。
世界著名机器人学专家,日本早稻田大学的加藤一郎教授说过:“机器人应当具有的最大特征之一是步行功能。
”双足机器人属于类人机器人,典型特点是机器人的下肢以刚性构件通过转动副联接,模仿人类的腿及髋关节、膝关节和踝关节,并以执行装置代替肌肉,实现对身体的支撑及连续地协调运动,各关节之间可以有一定角度的相对转动。
双足机器人不仅具有广阔的工作空间,而且对步行环境要求很低,能适应各种地面且具有较高的逾越障碍的能力,其步行性能是其它步行结构无法比拟的。
研究双足行走机器人具有重要的意义。
二、主要研究内容(示例)(一般包括设计方案、理论分析、研究方法与手段、结果与讨论、结论等) 2.1 机械实体设计2.1.1 零件图设计设计中的关键零件图如表1所示。
表2-1 关键零件示意图1.底座2.后座4.舵机3.胸板及手臂5.右脚板6.左脚板2.1.2 部件装配图2-1 部件图1 图2-2 部件图2图2-3 部件图32.1.3 总装图图2-5 总装图2.2 机械系统控制随着机械电子和自动控制等学科的快速发展,机器人的功能正日趋完善并开始在众多领域扮演着越来越多重要角色。
以双足直立行走机器人腿部结构为例,如图根据力学相关知识,可得简化后腿部的动态行走时膝关节力矩平衡公式:()()()t M t w f dtt dw J m m m =+ ()1 即 ()()t u K dt d f dtt d J a a m m =+θθ22 ()2 根据公式()()21,计算出系统的开环传递函数:()()11+=Ts s k s G ()3 小电流c U 通过放大器形成大电流c U ,在经过控制电机与一个积分环节网络得到最终的输出角度θ。
简易家庭服务机器人毕业设计开题报告
1、家用机器人的定义
机器人是一种机械或者虚拟的人工代理。通常的表现形式是一种可以通过自身的外显的运动或者变化传达出自主性的系统。机器人可以有具体化的形态,也可以是虚拟化的软件代理,但是后者在业内又被称作“Bots”以示区分。本文中如无特殊说明,所讨论的机器人是存在具体的物理外形的,由软件系统控制的智能化设备或装置。
[1]李宇翔,黄玉清. 简易家庭服务机器人系统设计[J]. 传感器与微系统, 2008
[2]C程序设计(第二版)谭浩强 著 清华大学出版社
[3]如何使用KEIL 8051 C编译器(韩) 金炯泰著 北京-北京航空航天大学出版社 2002
[4]单片机语言C51程序设计赵文博, 刘文涛编著 北京-人民邮电出版社 2005.10
第12—14周:根据机器人移动条件进行机器人地面移动及避障越障设计规划,利用proteus绘制电路图并实现软件仿真,利用KeilC51编译软件编程完成机器人的运动控制(移动,自主移动,避障,越障等)。
第15周:整理文档,完成毕业设计说明书。
第16周:校对所有设计内容,参加毕业设计论文答辩。
主要参考文献:
机器人集机、电、材料、计算机、传感器、控制技术等多门学科于一体,是一个国家高科技实力和发展水平的重要标志。随着智能机器人技术的迅速发展, 智能机器人的应用领域正在不断扩大, 已经开始进入了家庭服务行业, 由智能型家庭服务机器人代替人来完成清洁卫生、物品搬运、家电控制、家庭娱乐、病况监视、儿童教育、报时催醒、电话接听等各种家务劳动, 这种服务机器人是一种能够自主或者半自主地提供服务而不是提供生产的机器人, 它的使用能够提高人们的生活质量。
工业机器人毕业论文六篇
工业机器人毕业论文六篇工业机器人毕业论文范文1关键词: 本科毕业论文指导试验员化工化学类毕业论文试验角色转变本科毕业论文是本科生教育的一个综合性科学实践教学环节,也是同学在校学习期间学习成果的综合性总结,是整个教学活动中不行缺少的重要环节。
对理工科尤其是化学化工学科而言,毕业论文试验又是毕业论文工作的一个重要内容,它是培育同学综合运用所学学问和技能,理论联系实际,独立分析,解决实际问题的力量,以及训练专业科学讨论思维与方法的重要环节[1]。
化学化工类毕业论文试验是一种综合性的设计试验,不同于单学科试验。
在整个试验过程中,理论学问和试验内容、方法往往涉及多个学科,需要同学把所学学问有机地结合起来,才能很好地理解、把握,这样就对论文指导提出了更高的要求[2]。
然而,随着高校办学规模的扩大,招生人数的增加,毕业论文指导老师原来就有比较繁重的本科生、讨论生教学与科研任务,有限的精力使得他们对毕业生试验的指导和管理常常不能到位,“带而不管、管而不力”的现象时有发生[3]。
而且,同学还有可能由于试验室条件以及仪器、药品、耗材等不能到位,对试验过程拖拖拉拉,同学的侥幸心理、畏难心情等也会影响同学毕业论文的质量。
此外,当前毕业论文指导工作量的安排问题,势必会影响试验员的工作乐观性,不利于毕业论文试验的顺当开展。
因此,在毕业论文完成过程中,如何定位试验员的角色,发挥他们在试验室工作的优势,更好地服务本科毕业论文,提高毕业论文和人才培育质量,也将成为毕业论文教学改革讨论的话题。
以下就本科毕业论文指导中试验员所扮演的角色进行探讨。
1.做好试验资源规划师,实现试验资源合理利用和资源共享近年来随着招生规模的扩大,毕业论文完成期间,进入试验室开展试验的同学人数相应增加,势必会造成试验室用房和仪器设备以及药品耗材等的紧急。
因此,试验室管理人员,必需统筹规划,做好一名规划师,使试验室资源利用最大化,优势资源有效共享,保障同学毕业论文试验的正常开展。
高中通用技术校本课程开发研究
高中通用技术校本课程开发研究——以机器人教学案例为例结合国家教育指导计划及本校师生资源的校本(School-base)教材的有效开发和利用,不仅能带来更灵活的技术教学、更有效的师生互动,还能充分调动本校师生各自的活力,真正使通用技术教学迈向新课程倡导的“培养学生技术素养和创新设计精神”。
紧扣这一精神,笔者于2010年9月参加了全国通用技术教学年会,听取了国内外通用技术学科专家对韩国、日本、香港和国内开展通用技术学科的情况介绍,进一步领会了高中通用技术教学的总体指向——技术为主、设计为辅。
可是,纵观我国通用技术新课程近几年的教学实施,通用技术课程“技术味”“被淡化”!为了改变这一现状,笔者立足本校实际,以“生活化”和“技术化”为追求目标,从校本教材建设(理论)、实践项目制定(实践)和综合能力测评(评价)三个角度对通用技术《技术与设计1和2》必修课程融合机器人教学案例进行了探索。
一、以教材为骨架,以机器人为内核,编写理论型的通用技术校本教材综合通用技术必修课程《技术与设计1和2》的目录架构,笔者尝试对教材进行二次开发。
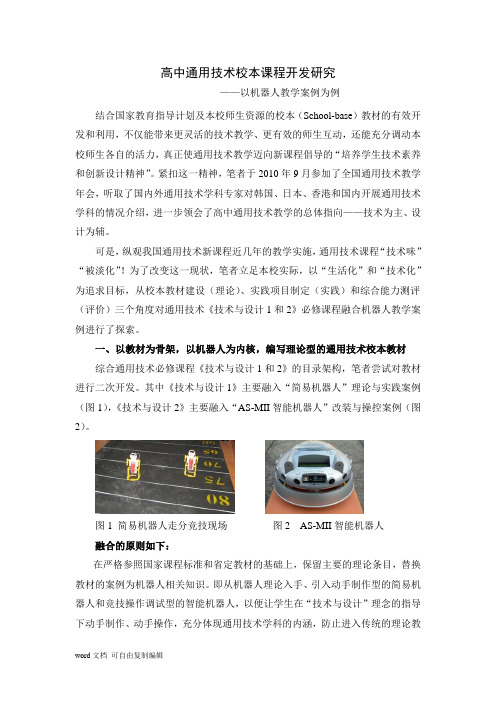
其中《技术与设计1》主要融入“简易机器人”理论与实践案例(图1),《技术与设计2》主要融入“AS-MII智能机器人”改装与操控案例(图2)。
图1 简易机器人走分竞技现场图2 AS-MII智能机器人融合的原则如下:在严格参照国家课程标准和省定教材的基础上,保留主要的理论条目,替换教材的案例为机器人相关知识。
即从机器人理论入手、引入动手制作型的简易机器人和竞技操作调试型的智能机器人,以便让学生在“技术与设计”理念的指导下动手制作、动手操作,充分体现通用技术学科的内涵,防止进入传统的理论教学误区。
(一)《技术与设计1》教材处理通过三年的教学实践,笔者对《技术与设计1》共8个章节内容进行压缩与扩展,最终形成四个模块,每个模块都是后续模块的前奏,它们互相支持,组成一个完整的学习链。
具体处理如下:模块一:技术世界与设计第一和第二章压缩成“技术世界与设计”并融合部分设计的理论介绍。
毕业设计论文示范(两万字)

摘要随着变频调速技术的发展,变频器调速已成为交流调速的主流,在化纤、纺织、钢铁、机械、造纸等行业得到广泛的应用。
变频器控制面板上配有键盘及液晶显示窗口,但只能实现手工操作,为了进行自动化控制,因此引进单片机技术,实现单片机与变频器之间的数据通信,提高变频器的控制能力和控制范围。
利用单片机组成的变频调速控制器,可以实现从低频(1~2Hz)起动到50Hz,可以消除以往工作频率50Hz直接起动对电机的冲击,延长电机的使用寿命,同时由于变频器的输出电压可以自适应调节,使负载电机可以工作在额定电压以下,不仅节能且可延长电机的使用寿命。
本文将介绍基于单片机控制的变频调速系统的设计,通过此系统控制变频器,由变频器去控制电机的转动,实现对矿井中主、副井提升机的模拟,以便演示矿井的工作过程,能够以手动和自动两种方式实现一次过程的五个状态,实时显示主、副井的深度。
关键词:变频调速,单片机,电机,提升机IAbstractWith VVVF technology development, the frequency converter adjust velocity in exchange has become the mainstream, and it obtains the widely application in some professions, such as chemical fiber, textile, steel and iron, machinery, papermaking and so on. There are keyboard and liquid crystal to demonstrate window on the frequency converter's control of face, but it can only realize manual operation, for realize the automatic control so we introduce SCM technology, as the result, between MCU and the frequency changer data communication can enhance the control ability and area of the frequency changer.Composed with SCM of the VVVF controller being able to start from low frequency (1~2Hz) to 50Hz.It can remove the working band in the past 50 Hz start the impingement to the electric motor directly. At the same time, since the frequency converter can adjust output voltage fit in with itself, making loads motor can work under fixed voltage, which not only energy conservation but also prolong the life time of the motor.The paper will describe the design of the VVVF system based on the SCM controlled, and through this systems control frequency converter, then control the motor rotating, realization simulation to mine pit in host and vice well,in order to demonstrate the process of mine pit, it can achieve a process of the five states by both manual and automatic way, real time display host and vice well depth. Keywords:VVVF,Single-Chip Computer,Motor,ElevatorII目录1绪论 (1)1.1选题的目的和意义 (1)1.2国内外研究综述 (2)1.3需求分析 (3)1.4可行性分析 (4)1.5开发工具简介 (5)1.5.1 KEIL Cx51 (6)1.5.2 PROTEUS (7)2 系统硬件设计 (9)2.1单片机控制系统 (9)2.2变频器电路 (12)2.3数/摸转换电路 (14)2.4信号检测电路 (15)2.5电源电路 (17)3 系统软件设计 (18)3.1主控制模块设计 (18)3.2键盘模块设计 (18)3.3显示模块设计 (19)3.416进制转十进制BCD的算法 (22)3.5频率计算程序 (23)3.6速度计算程序 (24)3.7深度计算程序 (24)4 系统测试 (25)4.1硬件测试 (25)4.2软件测试 (26)5 问题及展望 (31)III5.1已经解决的问题及解决方案 (31)5.2系统中的不足及展望 (32)致谢 (33)参考文献 (34)附录1 (35)附录2 (36)IV1绪论1.1 选题的目的和意义随着变频调速技术的发展,变频器调速已成为交流调速的主流,在化纤、纺织、钢铁、机械、造纸等行业得到广泛的应用。
电子设计大赛_需要什么准备吗
几点要求:1.完美的焊接工艺;2.各种仪器的熟练使用;3.各种常用元器件的识别(种类、材质、参数等等);4.产用芯片的使用方法和引脚定义(常用运放、比较器、数字电路、AD\DA、电源芯片等等);5.单片机的使用,说起单片机。
你说你现在在学习郭天祥的教程,那个教程是很实用的。
他那个是做好的成品板子,电路已经固定了,也很适合教学。
但对于你来说,你的思路一定要广,不要受他的思维限制。
现在阶段你先跟着教程学学,作为教学内容已经很好了。
教程嘛,都是单元电路的介绍和使用。
到了后期,要根据学习和掌握情况,你要自己设计出一个系统,把键盘、显示、AD\DA这些常用的东西在一个系统里都用上。
后期,根据老师的建议看需要选择什么单片机。
6.我觉得应该是细节了,焊接工艺可靠程度、电路的布局、PCB的走线、测试点的安置、电路的安装等等,这些都有可能直接给你判死刑。
在学校测得好好的,拿去测试点的路上由于颠簸,电路那里出了问题,到时候你要是做不到如火纯情,直接就手忙脚乱,一个头两个大,直接就挂了。
大概是我第一次参加全国竞赛的时候吧,有个兄弟的电路刚一通电,之间芯片冒了一股青烟随后,随后一直硕大无比的电解电容直接爆炸,直接被测试老师撵出去了。
大概是加电源的时候极性搞反了。
Dare to creat & enjoy!祝你在2011年的第十届全国大学生电子设计竞赛中展示你的风采、获得好成绩。
课程有:《电工电路基础》《低频电子线路》《数字电路》《高频电子线路》《电子测量》《智能仪器原理及应用》《传感器技术》《电机与电气控制》《信号与系统》《单片机接口原理及应用》等等。
所要学习的科目当然不能定局,知识面越广越好,它是对各个科目综合运用的产物,而且要具有非常强的动手和创新能力,对一个人的动手能力有很大的促进作用.学起来不要急于求成,掌握一些基本电路及调试,焊接技术,Protel软件的使用,能制作机器人最好对机械结构方面也要懂些。
很多东西只要学习了不一定什么时候就能用到,不要在学时表面感觉没用就不注重它,那样就犯了很大的错误了。
基于stm32f1的自主格斗机器人

基于stm32f1的自主格斗机器人摘要本实用新型发明是一种基于stm32f103的自主格斗器人。
该装置通过加装红外光电传感器、灰度传感器、测距传感器,来判断自身状态和外界环境,通过各个传感器的数值传到电脑进行数据分析再传回控制板,来实现机器人对外界和自身的判断和自主运行。
本发明通过对国外遥控格斗机器人的研究改进,使得机器人能实现自主运行。
将传感器接收到的数据传输到控制板,由其发出指令来控制机械运动,从而满足人们的使用要求。
关键词:智能化,传感器,自主判断引言近几年来,随着科技的飞速发展,“中国制造”向“中国智造”转型的故事正在上演。
而随着5G时代的到来,众多中国科技企业也是迅速崛起,进一步推动了“中国智造”的发展进程。
2020年新冠疫情期间,不少智能制造企业展示出自己的“智造”实力。
一些智能制造企业凭借技术积累和制造优势,推出送餐无人机、自动测温机器人和智能医用服务机器人等。
该设计是一种新型智能机器人,它采用了STM32f103VET6单片机来进行智能操控,加装了装红外光电传感器、灰度传感器、测距传感器,使其能自主判断自身状态的同时对其他车辆也进行位置判断。
一些基于智能互联汽车的高级功能在其身上也皆可体现,比如自动测距、自主躲避和自身状态判断等功能。
一、机器人的基本结构1.顺应重心低的要求,我们采用“后弧形”辅助上台设计,同时前端加铲子,以便实现攻击。
2.红外光电传感器*4 组成了完整的台上监测系统,在台上自主漫游时,能防止机器人漫游过程中掉落。
3.测距传感器*9 组成了攻击系统,通过 AD 采集返回值,可以检测到在车身附近是否有敌人。
4.灰度传感器*2 采集地面颜色数值来判断其在擂台中的位置及摆放状态。
5.处理器:基于 STM32 的 LUBY 控制器6.驱动器:采用了两个 BDMC1203 驱动器,四轮驱动,差速转弯。
7.电机*4:带动行走轮运动。
8.舵机*2:带动辅助爪转动。
二、软件逻辑设计自主机器人需要信息采集、数据处理的程序运行。
机器人比赛感受
机器人比赛感受第一篇:机器人比赛感受机器人比赛感受在这个月,我参加了世界机器人西南晒区公开赛(WER)在这个比赛中,我小组在比赛中获得了优异的成绩。
我认为参加这次比赛虽然让我的时间更加紧迫,但是我认为参加这次比赛却十分有意义!下面让我来谈一谈自己的赛后感吧!在我们陪训时,老师就对我们定下了高的要求,我们需要成功完成四个已知任务,其它三个未知任务只能我们去比赛现场完成了,所以,我们都十分努力地去完成!另外,我们都十分配合老师的训练,让我们的程序更加地完美。
在一次又一次的测试中,我们发现了自己程序的不足之处。
终于,做好充分准备的我们信心满满地向比赛进军了!(好吧,其实我们连足够的材料都没有,只是程序编地还行罢了!说实话,我们也没有自信的条件)虽然我们可以完成四个隐藏任务,但还有三个未知任务呢,只有到了比赛场才知道。
比赛了!本信心满满的我们在一瞬间丧气了。
如果想要完成这三个隐藏任务,就需要马达,可我们只有一个马达,已经造了另一个任务道具。
怎么办,只有尽观其变了。
在比赛中,我发现了许多有用的东西:其他参赛的参赛队员都有自己完成任务的不同方式与任务道具,这让我学到了不少新的东西,那就是创意,想象力,只有这几样东西结合起来,才能获得胜利。
我们出来比赛其实是出来学习的。
如果再有比赛,我会再次参加!必尽,重在参与呀!第二篇:机器人比赛[范文]中国青少年机器人竞赛中国青少年机器人竞赛活动是中国科协主办的面向21世纪青少年的系列科技创新活动之一。
该活动始办于2001年,竞赛旨在以丰富多彩、形式多样的机器人探究项目,培养青少年的创新精神和动手实践能力,激发他们对科学技术以及机器人研究应用的兴趣,提高他们的科学素质。
同时,该活动还选拔国内优秀的青少年参与国际青少年机器人竞赛和交流活动。
中国青少年机器人竞赛组织机构主办单位中国科学技术协会举办地省(直辖市、自治区)人民政府承办单位竞赛的性质中国青少年机器人竞赛以培养青少年的创新意识和实践能力、提高青少年的科学素质为目的,是一项将知识积累、技能培养、探究性学习融为一体,面向广大青少年机器人爱好者的科学普及性活动。
机器人大赛总结报告
机器人大赛总结报告机器人大赛是一个极富挑战性的学术竞赛。
它不仅水准高,难度大,综合性强,而且投资巨大的新兴学科。
我们之所以有机会参加如此高水的学科竞赛,这全得益于学校领导的大力支持:我们之所以能在极端不利的情况下取得今天的成绩,这全得益于所有指导老师的精心栽培和全体参赛队员的团结努力。
上学期末,当我得知学校将组织我们参加本次的机器人大赛我非常的兴奋,作为一个电子专业大三的学生能参加本次的学术盛宴,将是我求学道路中不可多得的好机遇,同时我也知道这也将是我求学中的一个挑战,我不仅要和同学们竞争这少有的名额,同时我还要和我自己竞争,通过几个月的学习训练我能否不断超越自己,提高自己的动手能,最终在大赛中战胜对手取得好成绩,为自己为学校增光添彩。
后来,我也了解到学校已经花重金购置几台机器人,听张老师简单介绍这台小小的机器居然花费数千元,通过学习才知道,这个小东西本领还不小,都已经算是很尖端的技术了,这让我对机器人有了更加浓厚的兴趣。
加上学校领导的重视以及指导老师精心指导,我暗自下定决心“一定要好好努力,不能辜负了学校和指导老师的期望”。
在讲完所有的基础课后,我们开始利用软件对机器人进行测试和调试,好让其达到最佳状态,但是是结果却不是很理想,我们队员之间相互探讨,充分发挥自己的主观能动性,将各自想到的方案集合在一起,相互改进在装载到机器人里,根据运行效果的好坏来决定最终的方案,直到比赛的前一天我们还在不断改进程序,我试了最后的效果非常的棒,其它组的效果也是一样。
于是我们机器充满电,整理行装,准备明天的出征。
第二天到后我们就开始最后的参数采集和调试,但由于现场的环境不断变化,更我们的调试带来了很大的困难,看得出队员都有些急躁,在老师的开导之后,我们调整好心态,克服外在的影响,开始最后的调试。
所有的队员都在分工合作,一丝不苟的准备最后调试,我们都知道胜败就在此一举了。
在我们所有准备都做好后,我对机器人做了最后一次测试,防守机器人效果非常好,就在我们信心满满的去测试进攻机器人时,我们遇到了参赛以来最大的难关——机器人的电机突然烧毁,而在场的工作组专家也无计可施。
移动机器人期末论文
基于移动机器人的基础性研究摘要移动机器人是一种能够通过传感器感知外界环境和自身状态,实现有障碍物的环境中根据要求进行自主运动,从而完成一定作业功能的机器人系统。
本论文主要介绍研究的是基于Basic Stamp 2(BS2)微控制器的移动小车。
BASIC Stamp 是由美国Parallax公司自1992年起所提创的一种微控制器,此种微控制器与其他微控制器不同的地方在于:微控制器(BASIC Stamp)中的ROM内存内建了一套小型、特有的BASIC 编程语言直译器,称为:PBASIC。
借助PBASIC想开发、撰写微控器应用的设计者,只要学会、具备BASIC编程语言的撰写能力,就能够用其开发出嵌入式系统所用的控制应用编程,大幅降低了嵌入式设计的技能学习门槛。
研究主要是从基础角度认识、利用BS2微控制器移动小车,故而主要从利用小车实现巡航、触须导航、红外线导航、QTI巡线导航的过程,认识BS2移动小车,熟悉嵌入式设计技能。
关键词:移动小车,导航,Basic Stamp 2,PBASICMobile robot based on fundamental researchAbstractMobile robot is able to perceive the external environment through sensors and their own state, there are obstacles in the environment to achieve, in accordance with the requirements of voluntary movement, in order to complete a certain job functions of the robot system.This paper introduces the study is based on the Basic Stamp 2 (BS2) microcontroller for mobilecar. Parallax BASIC Stamp by the United States since 1992, the company created amicro-controller is proposed that such micro-controller and the other is that different parts of the microcontroller: microcontroller (BASIC Stamp) built-in ROM memory A small, unique BASIC programming language interpreter, called: PBASIC.With PBASIC who want to develop, write microcontroller applications, the designer, as long as the Society, with the BASIC programming language, writing skills, we can use it to develop embedded control applications used in the system programming, embedded design greatly reduces the learning curve of skills . From the perspective of research knowledge base, the use of mobile car BS2 microcontroller and therefore the main achieved from the use of car cruise, tentacles navigation, infrared navigation, QTI transmission line navigation of the process, understanding BS2 moving car, familiar with embedded design skills.Key words:mobile car, navigation, Basic Stamp 2, PBASIC目录第一章绪论 (5)第二章组装及测试宝贝车机器人 (6)2.1.组装宝贝车机器人【3】 (6)2.1.1.任务一:组装宝贝车机器人 (6)2.1.2.任务二:重新测试伺服电机 (6)2.1.3.任务三:开始/复位指示电路和编程 (6)2.1.4.任务四:测试带有调试终端的速度控制 (6)第三章宝贝车机器人巡航控制 (7)3.1.任务概述【4】 (7)3.1.1.基本的动作:向前,向后,左转,右转和原地旋转; (7)3.1.2.调节任务1的运动,使动作更加精确; (7)3.1.3.使机器人由突然启动或停止变为逐步加速或减速运动。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
2010年福建电子设计大赛简易射门机器人
正文:
基于单片机的简易射门机器人设计
摘要:设计一款拥有自给电源的、能在限定场地范围内避开障碍物、显示自身所在的方位坐标、进行必要的声光报警、完成射门动作的简易机器人。
该简易机器人系统包括以L298为核心电机驱动电路、基于LM317的三端可调稳压电路、红外反射式避障检测电路、对射式光耦开关码盘速度检测电路、超声波检测电路等五大模块构成。
该机器人以STC89C52单片机为内核,采集超声波检测模块、红外避障模块的信息进行逻辑判断等综合分析,再利用L298驱动电路控制电机结合码盘速度检测模块实现90°转向、固定路程的正反转等功能;核心部件STC89C52单片机通过采集黑线检测模块的信息,进行分析判断结合数码管实现自身方位的显示。
关键词:单片机超声波检测红外线避障码盘速度检测
电机驱动控制
2.系统整体方案设计
2.1系统模块构成
本系统由红外线避障、码盘速度检测模块、L298电机驱动等七大模块,它们的
关系如下方框图示意:
2.2系统各模块方案确定
A、黑线检测模块和红外线避障模块
黑线检测模块和红外线避障模块的基本原理相同,这里我们介绍黑线检测模
块。
黑线检测采用灵敏度较高的光电传感器检测。
光电传感器利用光线的反射原理,当光线照射到下方场地上时发生反射,黑色胶布和白色纸的反射系数不同,这样光电传感器可根据接收到的反射光强弱来判断检测到黑线。
由于光电传感器本身存在的误差,当检测到白纸时电平并非刚好是参考值低电平0V,实验测得的实测值为0.7—1.8V,当检测到黑线电平光电传感器输出的高电平的实测值2.7—3.5V。
在这里需要一个LM324做电压比较器,制作一个开环电压比较电路。
将光电传感器的输出端接到LM324电压比较电路的同相输入端进行电压比较;在比较电路的反相输入端设置一个电压阀值;将低于阀值的电压调整成低电平输送到单片机的I/O口。
高于该阀值的调整成高电平。
经过反复的实验测量,找到一个稳定可靠的阈值——2.7V。
黑线检测模块的电路原理图如下:
B、超声波测速模块
超声波模块使用的超声传感器选用市面上集成度较好的小模块。
这种小模块具有集成度较高、体积小、使用方便且性能稳定;有利于提高机器人系统的整体性能,减小错误出现的概率。
经过小组成员的反复讨论、实验,本系统将超声波模块安装在改装小车的机座上,离地高度比较低,暂用的空间小,使得机器人系统的整体重心下降可增大改造小车车轮的抓地力,能较好地检测到乒乓球离小车的距离。
有利于系统的整体稳定性。
超声波模块结合单片机发射和接受超声波传感器信号,经单片机处理得出小车离球距离。
超声波模块的电路原理图如下:
C、光源检测模块
光源检测模块采用光敏电阻在外面套上一个黑色蔽光的塑料套,光敏电阻再串联1个10K的电阻接到5V直流电源上。
当黑色塑料套正好对准光源[允许有一定的角度偏差,实测值15°以内],使得光敏电阻的阻值减小,输出端电平由原来的高电平被拉低成低电平。
两个光源检测模块安装在小车的前端对称的两侧,提高光源检测的稳定性和可靠性。
光源检测模块的原理图如下:
D、码盘速度检测模块。
码盘速度检测模块采用HK33-2槽型光电耦合开关结合机器人系统机座车轮上的码盘;当车轮转动时码盘随着转动,槽型光电耦合开关的接受端将接收到明暗规律变化的光源,从而使整个码盘速度检测模块的输出端的电平也随之出现高低电平的规律变化。
考虑到改造车坐在正反转时的转速变化较大,信号采集时不排除采集到半个码盘赤的那种情况。
这里我们使用了一块LM358芯片形成一个电压滞回比较电路。
码盘速度检测模块的原理图如下:
E、数码管显示模块
数码管显示模块采用一个四位七段共阴数码管和两块位锁存芯片74HC573构成;单片机通过I/O口接收到由黑线检测模块检测到的信号经由单片机的中断检测程序的分析处理,得到小车所在位置的坐标值,转换成二进制代码再通过74HC573锁存器实现数码管的静态存显示。
共阴数码管和两个位锁存器的接线原理图如图示:
F、以L298为核心的电机驱动电路
L298是专用电机驱动集成电路,属于双H桥集成电路,与L系列的其它控制芯片的主要差别是其输出电流增大,功率增强。
其输出电流为2A,最高可达4A,可以驱动感性负载,步进电机,电磁阀等,特别是其输入端可以与单片机直接相联,从而很方便地受单片机控制。
当驱动直流电机时,可以直接控制电机,并可以实现电机正转与反转,实现此功能只需改变输入端的逻辑电平。
本模块具有电体积小,控制方便、控制算法较为简单的特点。
3.机器人系统的软件程序的设计与实现
3.1软件程序的设计
系统主程序首先对系统进行初始化,包括设置是有定时器、中断和端口、定义全局变量和设计子程序。
子程序主要包括走直线驱动程序、实现左右90°转向程序、红外线避障模块检测程序、超声波探测与距离计算程序、码盘测速程序和计数中断程序、数码管显示动态显示和光电报警程序等子程序,在多级子程序的调用的情况下要注意嵌套的顺序和全局变量和非全局变量的使用。
在数码管的静态显示程序要注意根据人眼的滞留效应设置延迟函数。
本简易射门机器人的系统软件程序的流程图如下:
3.2程序清单[见附录]
4.结论
通过硬件电路的反复试验和软件电路的联合调试,基本上实现设计一款以STC89C52单片机为核心的简易机器人。
该简易机器人具有红外避障功能,能自主进行障碍物的检测分析做出转向避障的工作;STC89C52单片机结合码盘测速模块的使用实现机器人速度测量和移动定固距离的功能;黑线检测模块采集信号传送给单片机分析处理再由共阴数码管地显示自身的坐标方位;在避开五个障碍物之后,开启超声波检测模块,通过改造的机器人在原地打转的方式实现寻获小球所在的位置,前进再探测到金属环之后实现延迟功能、进行声光报警和完成射门动作。