Software division and square root using Goldschmidt’s algorithms
融合开源软件思想与实例的软件工程课程教学研究
第 22卷第 12期2023年 12月Vol.22 No.12Dec.2023软件导刊Software Guide融合开源软件思想与实例的软件工程课程教学研究黄浩炜,姚卫,张锦(长沙理工大学计算机与通信工程学院,湖南长沙 410114)摘要:软件工程是高等院校计算机科学教育中的一门重要学科,旨在帮助学生建立对软件工程领域的全面认识,使他们具备必要的理论和实践基础。
传统软件工程教学主要通过课堂授课、实验实践和项目作业相结合等方式进行,在当前软件研究和软件开发迅速变化的新时期存在一定局限性。
长沙理工大学在软件工程概论课程实践中着重强化学生理解开源软件思想,将开源软件案例贯穿于需求分析、软件设计基础、软件体系结构设计、用户界面设计和软件详细设计等各阶段理论学习,同时引入虚拟仿真实验培养学生软件需求分析的真实能力,让学生从项目需求分析、设计、开发到测试各阶段都能全面深入地理解软件工程,着重培养学生软件工程综合能力,总体上取得了良好的教学成效。
关键词:软件工程;开源软件;案例教学;软件需求分析;虚拟仿真实验DOI:10.11907/rjdk.231859开放科学(资源服务)标识码(OSID):中图分类号:TP311.5;G642 文献标识码:A文章编号:1672-7800(2023)012-0014-05Research on Software Engineering Teaching Integrating Open SourceSoftware Philosophy and ExamplesHUANG Haowei, YAO Wei, ZHANG Jin(School of Computer and Communication Engineering, Changsha University of Science and Technology, Changsha 410114, China)Abstract:Software engineering is an important discipline in computer science education at the higher education level, aimed at helping stu‐dents establish a comprehensive understanding of the field of software engineering and providing them with necessary theoretical and practical foundations. Traditional software engineering education mainly involves a combination of classroom lectures, laboratory practices, and project assignments. However, in the rapidly evolving era of software research and development, there may be certain limitations. Therefore, Chang‐sha University of Science and Technology emphasizes the practice of the course "introduction to software engineering" to enhance students' un‐derstanding of the open-source software concept. Throughout the theoretical learning of stages such as requirements analysis, software design fundamentals, software architecture design, user interface design, and software detailed design, open-source software cases are integrated. Si‐multaneously, virtual simulation experiments are introduced to cultivate students' real capabilities in software requirements analysis, allowing them to have a comprehensive and in-depth understanding of software engineering from project requirements analysis, design, development to testing. The focus is on nurturing students' overall software engineering capabilities, leading to comparatively favorable teaching results.Key Words:software engineering; open-source software; case study; software requirement analysis; virtual simulation experiment0 引言当前,软件发展的趋势已转变为“软件定义一切,软件无处不在”,软件成为现代文明的新载体之一。
学数学的作文英语
Learning mathematics is an essential part of education that not only sharpens analytical skills but also fosters logical thinking and problemsolving abilities.Heres a detailed essay on the importance of studying mathematics and how it can be approached effectively.Title:The Significance of Mathematics in EducationIntroduction:Mathematics is often referred to as the language of the universe.It is a subject that transcends cultural and linguistic barriers,providing a universal framework for understanding the world around us.From counting to complex calculations,math is an integral part of our daily lives.Importance of Mathematics:1.Foundation for Other Subjects:Mathematics is a fundamental building block for other sciences such as physics,chemistry,and engineering.It provides the necessary tools to analyze and interpret data,making it indispensable for scientific inquiry.2.Critical Thinking:Studying math helps develop critical thinking skills.It encourages students to approach problems systematically and logically,breaking them down into manageable parts.3.ProblemSolving Abilities:Mathematical problems often have multiple solutions, which teaches students to think creatively and find the most efficient method to solve a problem.4.RealWorld Applications:Mathematics is not confined to the classroom.It is used in everyday life,from managing finances to understanding statistical data in various fields such as economics,medicine,and social sciences.Approaches to Learning Mathematics:1.Understanding Concepts:Rather than memorizing formulas,it is crucial to understand the underlying concepts.This approach helps in applying mathematical principles to new and unfamiliar problems.2.Practice:Mathematics is a subject that requires consistent practice.Regular exercises and problemsolving can significantly improve ones ability to tackle complex problems.e of Technology:Utilizing technology such as calculators,computer software,and online resources can enhance the learning experience.They can provide visual representations of mathematical concepts and offer interactive ways to solve problems.4.Group Work:Collaborative learning can be beneficial in mathematics.Discussing problems with peers can lead to new insights and a deeper understanding of the subject.Challenges in Learning Mathematics:1.Perception of Difficulty:Many students find mathematics challenging and may develop a fear of the subject.Overcoming this fear is essential for embracing the subject fully.ck of RealWorld Connection:Sometimes,the abstract nature of mathematics can make it difficult for students to see its relevance.Connecting mathematical concepts to realworld applications can help bridge this gap.Conclusion:In conclusion,mathematics is a subject of immense importance that offers a wealth of benefits to students.It not only equips them with analytical and problemsolving skills but also prepares them for various professional fields.By adopting effective learning strategies and recognizing the relevance of mathematics in everyday life,students can overcome challenges and excel in this fascinating subject.。
软件工程-总体设计
设 构约束。
计
(2)子模式设计
子模式是用户使用的数据视图。
过 (3)完整性(Integrality)和安全性(Security)设计
程 (4)优化(Optimize)
主要目的是改进模式和子模式以优化数据的存取。
前一页
总
体
制定测试计划
的
在软件开发的早期阶段考虑测试
设 计
(Testing)问题,能促使软件设计人员 在设计时注意提高软件的可测试性 。
程 设计过程的下一个重要阶段——结构设计。
前一页
功能分解
总
体 为了最终实现目标系统,必须设计出组成 这个系统的所有程序和文件(或数据库)。对
的 程序(特别是复杂的大型程序)的设计,通常
设 分为两个阶段完成:
计
结构设计(Structure Design) :是总体设
计阶段的任务,确定程序由那些模块组
模块彼此间互相依赖(连接)的紧密程度。
前一页
耦合度
耦合度可以分为七级:
软件设计时应尽量使用数据 藕合,减少控制藕合,限制 外部环境藕合和公共数据藕 合,杜绝内容藕合。
非直接藕合 低
数据藕合
控制藕合
藕
特征藕合
合 度
外部藕合
公共藕合 内容藕合 高
数据耦合 (Data Coupling):如果两
个模块彼此间通过参数交换信息, 而且交换的信息仅仅是数据,那么 这种耦合称为数据耦合。
设 计
设函数C(x)定义问题x的复杂程度, 函数E(x)确定解决问题x需要的工作量
的
(时间),对于两个问题p1和p2,如果
概 念
C(p1)> C(p2)
和
E(p1)> E(p2)
关于数学的英文单词
关于数学的英文单词一、数学的英文单词的拼写和发音数学的英文单词mathematics是一个复数名词,但它的意思是单数的,表示一门学科或一种科学。
因此,它的谓语动词要用单数形式,例如:Mathematics is my favorite subject.数学是我最喜爱的学科。
数学的英文单词mathematics的缩写有两种,一种是math,一种是maths。
它们的意思和用法都一样,只是在不同的地区有不同的习惯。
一般来说,美国和加拿大的人更喜欢用math,而英国、澳大利亚和其他英语国家的人更喜欢用maths。
例如:I'm good at math.我数学很好。
I'm good at maths.我数学很好。
二、数学的英文单词的用法数学的英文单词mathematics可以用来表示数学这门学科,也可以用来表示数学的内容或能力。
当表示数学这门学科时,它的前面一般不用冠词,当表示数学的内容或能力时,它的前面一般要用冠词。
例如:I like mathematics. 我喜欢数学(这门学科)。
I like the mathematics of fractals. 我喜欢分形的数学(内容)。
He has a talent for mathematics. 他有数学(能力)的天赋。
数学的英文单词mathematics可以和其他的词组合,形成一些专门的术语,表示数学的不同分支或领域。
例如:applied mathematics 应用数学pure mathematics 纯数学discrete mathematics 离散数学computational mathematics 计算数学mathematical logic 数理逻辑mathematical physics 数学物理mathematical biology 数学生物学数学的英文单词math或maths可以用来修饰其他的名词,表示与数学相关的事物或人。
开方算法(Squarerootalgorithm)

开方算法(Square root algorithm)A manual, open square algorithmThis method is in a high school of gravity and space, because it need a large amount of square root calculation can be used to research the calculator, helpless.The square is divided into the following steps:(a) aA, that will be a long radicand into several segments. The law is specific:1, the direction is from low to high;2, each of the two numbers for a period;3, to the end, the high level can be less than two, but not without number.Such as: 43046721 points after 43, 04 and 67 is 21.12321 minutes after the 1, 23, 21Among them, each section in the middle of a can be written in skilled later.A later, actually can be seen after prescribing is the result of a few digits, such as 43046721 minutes after the four period, then the result is four digit arithmetic.(two) rootThe operation process of evolution and division is actually very similar, there is a process after subtraction multiplication.Here in 43046721 cases.After the 43, 04 points, 67, 21From high to low operation, look at the top two in 43, due to the 62 closest to 43 and not more than 43, thus taking (here is not the right word, to find and use the 6 division word), then subtraction (see below):Six---43, 04, 67, 2136-- -- --704Here a fall two, and different division.The following process is the most complex part of the algorithm,called the build number, is to use the word because of the number of the last calculated to lose more trouble.First of all, will have 6 x 2=12 quotient multiplied by 2:6The 12 is not the real 12, is actually 120 bits on the 0 out is to write down a number of business.We might assume that the number of operators to the next A, we must consider the question is: to find a A from the 0-9, the:12A * A is the closest to but not more than the rest of the above number 704. Note that the A on behalf of a digit, if A=6, then 12A is not 12 but 126 x 6.During the above process and division in the trial's very similar.After verification, 125 * 5=625 to meet the requirements, so a business number is 5. (below)Down and so on:Sixty-five* 2--One hundred and thirtyOne thousand three hundred and six* 6-Seven thousand eight hundred and thirty-sixSix hundred and fifty-six* 2--One thousand three hundred and twelveThirteen thousand one hundred and twenty-one* 1-Thirteen thousand one hundred and twenty-oneSo the square root of 43046721 is 6561From a process we can see, more to the back, the greater the amount of calculation, therefore, by our calculation, then calculate some endless numbers, such as 7 square root, the accuracy is very limited.The general method above is square, please.Manual two, cubic algorithmThis method is just yesterday successfully developed, in order to cope with in the molecular radius by volume for the cubic operation.The method of cubic and square method is very similar, but more complex, if not familiar with the method, rather than by bb said: together! Of course, master, than error method is much faster.Cubic process consists of the following steps:(a) aConsistent with the square, only one point: This is three bits each for a period of(two) rootHere in 41063625 casesTaking the first to determine the number and square is similar, just to find a few cubic (below):Three--41, 063, 62527-- -- --14063Fall three a!The number of the following is the process of making trouble, the process is as follows:1, the quotient multiplied by 3. 3 x 3=9The number multiplied by 2, will be taking the wrong one back after 3, added in the first step number calculated:4 x 3=12Nine+ 12--One hundred and two3, will be multiplied by the number of second steps that have quotient: 102 * 3=306Number 4, will be taking the square, with a back the wrong numbercalculated in the third step.42=16Three hundred and six+ 16-Three thousand and seventy-six5, will be multiplied by the number of calculated in step fourth to the number of operators, making it the closest and do not exceed the remaining number:3076 x 4=12304The 12304 is that we will make the number, this number will be back to the original cut open it.34--41, 063, 62527-- -- --1406312304--1759625Someone will ask, how do you know the number of business is 4? Indeed, I do not know the beginning, to determine the process of taking the number is actually similar to square in test taking, but the process is cumbersome than the square to much.When after first step process that made the number, the number 9, because do not know should be taking a few, so we can assume that the quotient of the 0, then on the basis of the second step, 90 * 3=270. 270 dislocation plus a number, equal to 10 times larger than,Since we assume that the 0 operators, by third, 270 to 2700. This is we're going to look at a number of 2700 times what is closest to and not more than 14063, the number of possible (here say "may" cause from below can see) is what we are going to taking the number of. 5 at first glance is very appropriate, but you have to consider that we are taking 0 assumptions how much less, so taking 5 may -. Experience tells us that 4 and 5 are possible, then we can get to 5's number, then 1-5 each step, found that the number has exceeded 14063, so 4 is that we want business number.Note: this test taking process in the future is a skilled eyecan see it.The following steps and so on:Thirty-four* 3-One hundred and two15 + (3 x 5)-One thousand and thirty-five* 34-Four thousand one hundred and fortyThree thousand one hundred and five-Thirty-five thousand one hundred and ninety + 2552-Three hundred and fifty-one thousand nine hundred and twenty-five* 5-One million seven hundred and fifty-nine thousand six hundred and twenty-five5 here is not how the taking out I repeat it?The whole process is quite complicated, which lost any step may lead to naught, so we must require accurate calculation. Skilled, speed can be guaranteed. I have to manually open the method and the primary method of comparison, the former than the latter at least twice as fast as.In addition, it is worth noting that if the known result is an integer, then the last one to determine the above methods can not be used directly, according to the specific number of cubic bottom can be determined, but the premise is very familiar with the 1-9 cubic meter. Table 1-5 cubic Comrades should be very familiar with, the following is not commonly used:63=216 73=343 83=512 93=729Conclusion: the two methods can be used to accurately squareand cubic operations, as long as you have patience and want to count several even several. But the process of cubic is very complex, there may be optimized, but the lack of time, I did not consider other methods. Comrades anyone interested in, can make the optimization of the two algorithms, for my reference.。
物流专业术语
物流专业术语范围本标准确定了物流活动中的基本概念术语、物流作业术语、物流技术装备与设施术语、物流管理术语及其定义.本标准适用于物流及相关领域的信息处理和信息交换,亦适用于相关的法规、文件;引用标准下列标准所包含的条文,通过在本标准中引用而构成为本标准的条文;本标准出版时,所示版本均为有效;所有标准都会被修订,使用本标准的各方应探讨使用下列标准最新版本的可能性;GB/T 1992--1985 集装箱名词术语neq ISO 830:1981GB/T 4122;1--1996 包装术语基础CB/T 17271--1998 集装箱运输术语中文索引AABC分类管理....................................6.9安全库存.......................................4.16B班轮运输.......................................5.34搬运...........................................4.22包装...........................................4.25保管...........................................4.12保税仓库.......................................5.5报关...........................................5.40报关行.........................................5.41C仓库...........................................5.1仓库布局.......................................6.4.仓库管理.......................................6.3叉车...........................................5.19储存...........................................4.11船务代理.......................................5.36D大陆桥运输.....................................5.33单元装卸.......................................4.24第三元物流.....................................3.25电子订货系统...................................6.10电子数据交换...................................3.31定量订货方式...................................6.7定牌包装.......................................4.27定期订货方式...................................6.8定制物流.......................................3.26堆码...........................................4.21F发货区.........................................5.14废弃物物流.....................................3.19分拣...........................................4.37G公路集装箱中转站...............................5.28 供应链.........................................3.29供应链管理.....................................6.21供应商库存.....................................6.26供应物流.......................................3.15共同配送.......................................4.35国际多式联运...................................5.32国际货物运输保险...............................5.39 国际货运代理...................................5.37国际铁路联运...................................5.31国际物流.......................................3.24H海关监管货物...................................5.7换算箱.........................................5.24回收物流.......................................3.18货场...........................................5.16货垛...........................................4.20货架...........................................5.17J集货...........................................4.39集装化.........................................4.31集装箱.........................................5.23集装箱货运站...................................5.29.集装箱码头.....................................5.30集装箱运输.....................................4.7集装运输.......................................4.6计算局付诸订货系统.............................6.25 监管仓库.......................................5.6拣选...........................................4.38检验...........................................4.43进出口商品检验.................................5.42 经常库存.......................................4.15经济订货批量...................................6.6K控湿储存区.....................................5.11.库存...........................................4.14库存控制.......................................6.5库存周期.......................................4.17.库房...........................................5.8快速反应.......................................6.22L冷藏区.........................................5.9冷冻区.........................................5.10冷链...........................................4.42理货...........................................5.38立体仓库.......................................5.3联合运输.......................................4.2连续库存补充计划...............................6.24 料棚...........................................5.15零库存技术.....................................6.13.流通加工.......................................4.41绿色物流.......................................3.20M门到门.........................................4.8P配送...........................................4.34配送需要计划...................................6.17 配送中心.......................................4.36配送资源计划...................................6.18 拼箱货.........................................4.10Q企业物流.......................................3.21企业资源计划...................................6.20 前置期或提前期.............................4.18全集装箱船.....................................5.26S散装化.........................................5.32社会物流.......................................3.22生产物流.......................................3.16收货区.........................................5.13输送区.........................................5.20甩挂运输.......................................4.5T特种货物集装箱.................................5.25铁路集装箱.....................................5.27. 托盘...........................................5.18托盘包装.......................................4.30 W温度可控区.....................................5.12 无形损耗.......................................3.33 物料需要计划...................................6.15 物流...........................................3.2物流成本.......................................3.7.物流成本管理...................................6.14. 物流单证.......................................3.13 物流管理.......................................3.8物流活动.......................................3.3物流技术.......................................3.6物流联盟.......................................3.14 物流模数.......................................3.5物流企业.......................................3.12 物流网络.......................................3.10 物流信息.......................................3.11 物流战略.......................................6.1物流战略管理...................................6.2. 物流中心.......................................3.9物流资源计划...................................6.19. 物流作业.......................................3.4物品...........................................3.1物品储备.......................................4.13. X箱式车.........................................5.22销售包装.......................................4.26 销售物流.......................................3.17 虚拟仓库.......................................5.4虚拟物流.......................................3.27Y业务外包.......................................6.27 有效客户反应...................................6.23 有形损耗.......................................3.32 运输...........................................4.1运输包装.......................................4.29. Z增值物流服务...................................3.28 整箱货.........................................4.9直达运输.......................................4.3直接换装.......................................4.33制造资源计划...................................6.16中性包装.......................................4.28中转运输.......................................4.4装卸...........................................4.23准时制.........................................6.11准时制物流.....................................6.12自动导引车.....................................5.21自动化仓库.....................................5.2租船运输.......................................5.35组配...........................................4.40英文索引AABC classification......................................6.9 Article.................................................3.1Article reserves........................................4.13 Assembly................................................4.40 Automatic guided vehicle AGV .........................5.21 Automatic warehouse.....................................5.3.BBar code................................................3.30Boned warehouse.........................................5.6Box car.................................................5.22CCargo under custom's supervision........................5.8 Chill space.............................................5.9Cold chain..............................................4.42 Combined transport......................................4.2 Commodity inspection....................................5.42 Computer assisted ordering CAO .......................6.25 Container...............................................5.23 Container freight station CFS ........................5.29 Container terminal......................................5.30 Container transport.....................................4.7 Containerization........................................4.31 Containerized transport.................................4.6 Continuous replenishment program CRP .................6.24 Conveyor................................................5.20Cross docking...........................................4.33 Customized logistics....................................3.26 Customs broker..........................................5.41 Customs declaration.....................................5.40Cycle stock.............................................4.15D Distribution............................................4.34 Distribution center.....................................4.36 Distribution logistics..................................3.17 Distribution processing.................................4.41 Distribution requirements planning DRP ...............6.17 Distribution resource planning DRP II ................6.18 Door-to-door............................................4.8Drop and pull transport.................................4.5EEconomic order quantity EOQ ..........................6.6 Efficient customer response ECR ......................6.23 Electronic data interchange EDI ......................3.31 Electronic order system EOS ..........................6.10 Enterprise resource planning ERP .....................6.20 Environmental logistics.................................3.20 Export supervised warehouse.............................5.7 External logistics......................................3.22FFixed-interval system FIS ............................6.8Fixed-quantity system FQS ............................6.7Fork lift truck.........................................5.19Freeze space............................................5.10Full container load FCL ..............................4.9Full container ship.....................................5.26 G Goods collection........................................4.39Goods shed..............................................5.15Goods shelf.............................................5.17Goods stack.............................................4.20Goods yard..............................................5.16HHanding/carrying........................................4.22 Humidity controlled space...............................5.11IIn bulk.................................................4.32Inland container depot..................................5.28 Inspection..............................................4.43 Intangible loss.........................................3.33Internal logistics......................................3.21 International freight forwarding agent..................5.37 International logistics.................................3.24 International multimodal transport......................5.32 International through railway transport.................5.31 International transportation cargo insurance............5.39Inventory...............................................4.14 Inventory control.......................................6.5 Inventory cycle time....................................4.17JJoint distribution......................................4.35Just in time JIT .....................................6.11Just-in-time logistics..................................6.12 LLand bridge transport...................................5.33Lead-time ..............................................4.18Less than container load LCL .........................4.10 Liner transport.........................................5.34 Loading and unloading ..................................4.23 Logistics...............................................3.2Logistics activity......................................3.3Logistics alliance......................................3.14 Logistics center........................................3.9 Logistics cost..........................................3.7Logistics cost control..................................6.14 Logistics documents.....................................3.13 Logistics enterprise....................................3.12 Logistics information...................................3.11 Logistics management....................................3.8 Logistics modulus.......................................3.5 Logistics network.......................................3.10 Logistics operation.....................................3.4 Logistics resource planning LRP ......................6.19 Logistics strategy......................................6.1 Logistics strategy management...........................6.2 Logistics technology....................................3.6MManufacturing resource planning MRP II ...............6.16 Material requirements planning MRP ...................6.15 Military logistics......................................3.23NNeutral packing.........................................4.28OOrder cycle time........................................4.19Order picking...........................................4.38 Outsourcing.............................................6.27PPackage/packaging.......................................4.25 Packing of nominated brand..............................4.27 Pallet..................................................5.18 Palletizing.............................................4.30QQuick response QR ....................................6.22RRailway container yard..................................5.27 Receiving space.........................................5.13 Returned logistics......................................3.18SSafety stock............................................4.16Sales package...........................................4.26 Shipping agency.........................................5.36 Shipping by chartering..................................5.35 Shipping space..........................................5.14 Sorting.................................................4.37Specific cargo container................................5.25 Stacking................................................4.21 Stereoscopic warehouse..................................5.4 Storage.................................................4.12 Storehouse..............................................5.2 Storing.................................................4.11Supply chain............................................3.29 Supply chain management SCM ..........................6.21 Supply logistics........................................3.15T Tally...................................................5.38Tangible loss...........................................3.32 Temperature controlled space............................5.12 Third-part logistics TPL .............................3.25 Through transport.......................................4.3 Transfer transport......................................4.4 Transport package.......................................4.29 Transportation..........................................4.1 Twenty-feet equivalent unit TEU ......................5.24 UUnit loading and unloading..............................4.24VValue-added logistics service...........................3.28 Vendor managed inventory VMI .........................6.26 Virtual logistics.......................................3.27Virtual warehouse.......................................5.5W Warehouse...............................................5.1 Warehouse layout........................................6.4 Warehouse management....................................6.3ZZero-inventory technology...............................6.133.基本概念术语3.1 物品article经济活动中涉及到实体流动的物质资料3.2 物流logistics物品从供应地向接收地的实体流动过程;根据实际需要,将运输、储存、装卸、搬运、包装、流通加工、配送、信息处理等基本功能实施有机结合;3.3 物流活动logistics activity物流诸功能的实施与管理过程;3.4 物流作业logistics operation实现物流功能时所进行的具体操作活动;3.5 物流模数logistics modulus物流设施与设备的尺寸基准;3.6 物流技术logistics technology物流活动中所采用的自然科学与社会科学方面的理论、方法,以及设施、设备、装置与工艺的总称;3.7 物流成本logistics cost物流活动中所消耗的物化劳动和活劳动的货币表现;3.8 物流管理logistics management为了以最低的物流成本达到用户所满意的服务水平,对物流活动进行的计划、组织、协调与控制;3.9 物流中心logistics center从事物流活动的场所或组织,应基本符合以下要求:a 主要面向社会服务;b物流功能健全;c完善的信息网络;d辐射范围大;e少品种、大批量;f存储\吞吐能力强;g物流业务统一经营、管理;3.10 物流网络logistics network物流过程中相互联系的组织与设施的集合;3.11 物流信息logistics information反映物流各种活动内容的知识、资料、图像、数据、文件的总称;3.12 物流企业logistics enterprise从事物流活动的经济组织;3.13 物流单证logistics documents物流过程中使用的所有单据、票据、凭证的总称;3.14 物流联盟logistics alliance两个或两个以上的经济组织为实现特定的物流目标而采取的长期联合与合作;3.15 供应物流supply logistics为生产企业提供原材料、零部件或其他物品时,物品在提供者与需求者之间的实体流动; 3.16 生产物流production logistics生产过程中,原材料、在制品、半成品、产成品等,在企业内部的实体流动;3.17销售物流distribution logistics生产企业、流通企业出售商品时,物品在供与需方之间的实体流动;3.18 回收物流returned logistics不合格物品的返修、退货以及周转使用的包装容器从需方返回到供方所形成的物品实体流动;3.19 废弃物物流waste material logistics将经济活动中失去原有使用价值的物品,根据实际需要进行收集、分类、加工、包装、搬运、储存等,并分送到专门处理场所时形成的物品实体流动;3.20 绿色物流environmental logistics在物流过程中抑制物流对环境造成危害的同时,实现对物流环境的净化,使物流资料得到最充分利用;3.21 企业物流internal logistics企业内部的物品实体流动;3.22 社会物流external logistics企业外部的物流活动的总称;3.23 军事物流military logistics用于满足军队平时与战时需要的物流活动;3.24 国际物流international logistics不同国家地区之间的物流;3.25 第三方物流third-part logistics TPL由供方与需方以外的物流企业提供物流服务的业务模式;3.26 定制物流customized logistics根据用户的特定要求而为其专门设计的物流服务模式;3.27 虚拟物流virtual logistics以计算机网络技术进行物流运作与管理,实现企业间物流资源共享和优化配置的物流方式; 3.28 增值物流服务value-added logistics service在完成物流基本功能基础上,根据客户需要提供的各种延伸业务活动;3.29 供应链supply chain生产及流通过程中,涉及将产品或服务提供给最终用户活动的上游与下游企业,所形成的网链结构;3.30 条码bar code由一组规则排列的条、空及字符组成的,用以表示一定信息的代码;同义词:条码符号bar code symbolGB/T 4122.1-1996中4.173.31 电子数据交换electronic data interchange EDI通过电子方式,采用标准化的格式,利用计算机网络进行结构数据的传输和交换;3.32 有形消耗tangible loss可见或可测量出来的物理性损失、消耗;3.33 无形消耗intangible loss由于科学技术进步而引起的物品贬值;物流作业术语4.1 运输transportation用设备和工具,将物品从一地点向另一地点运送的物流活动;其中包括集货、分配、搬运、中转、装入、卸下、分散等一系列操作; GB/T 4122.1-1996中4.174.2 联合运输combined transport一次委托,由两家以上运输企业或用两种以上运输方式共同将某一批物品运送到目的的运输方式;4.3 直达运输through transport物品由发运地到接收地,中途不需要换装和在储存场所停滞的一种运输方式;4.4中转运输transfer transport物品由生产地运达最终使用地,中途经过一次以上落地并换装的一种运输方式;4.5 甩挂运输drop and pull transport用牵引车拖带挂车至目的地,将挂车甩下后,换上新的挂车运往另一个目的地的运输方式; 4.6 集装运输containerized transport使用集装器具或利用捆扎方法,把裸装物品、散粒物品、体积较小的成件物品,组合成为一定规格的集装单元进行的运输;4.7 集装箱运输container transport以集装箱为单元进行货物运输的一种货运方式; GB/T17271-1998中3.2.14.8 门到门door-to-door承运人在托运人的工厂或仓库整箱接货,负责运抵收货人的工厂或仓库整箱交货;GB/T 17271-1998中3.2.14.9 整箱货full container load FCL一个集装箱装满一个托运人同时也是一个收货人的工厂或仓库整箱交货;GB/T 17271-1998中3.2.4.24.10 拼箱货less than container load LCL一个集装箱装入多个托运人或多个收货人的货物;GB/T 17271-1998中3.2.4.34.11 储存storing保护、管理、贮藏物品; GB/T 4122.1-1996中4.24.12 保管storage对物品进行保存及对其数量、质量进行管理控制活动;4.13 物品储存article reserves储存起来以备急需的物品;有当年储存、长期储存、战略储备之分;4.14 库存inventory处于储存状态的物品;广义的库存还包括处于制造加工状态和运输状态的物品;4.15 经常库存cycle stock在正常的经营环境下,企业为满足日常需要而建立的库存;4.16 安全库存safety stick为了防止由于不确定性因素如大量突发性订货、交货期突然延期等而准备的缓冲库存; 4.17 库存周期inventory cycle time在一定范围内,库存物品从入库到出库的平均时间;4.18 前置期或提前期lead time从发出订货单到货物的时间间隔;4.19 订货处理周期order cycle time从收到订货单到将所订货物发运出去的时间间隔;4.20 货垛goods stack为了便于保管和装卸、运输,按一定要求分门别类堆放在一起的一批物品;4.21 堆码stacking将物品整齐、规则地摆放成货垛的作业;4.22 搬运handing/carrying在同一场所内,对物品进行水平移动为主的物流作业;4.23 装卸loading and unloading物品在指定地点以人力或机械装入运输设备或卸下; GB/T 4122.1-1996中4.54.24 单元装卸unit loading and unloading用托盘、容器或包装物见小件或散装物品集成一定质量或体积的组合件,以便利用机械进行作业的装卸方式;4.25 包装package/packaging为在流通过程中保护产品、方便储运、促进销售,按一定技术方面而采用的容器、材料及辅助物等的总体名称;也指为了达到上述目的而采用容器、材料和辅助物的过程中施加一定技术方法等的操作活动; GB/T 4122.1-1996中2.14.26 销售包装sales package又称内包装,是直接接触商品进入零售网点和消费者或用户直接见面的包装;4.27 定牌包装packing of nominated brand买方要求卖方在出口商品/包装上使用买方指定的牌名或商标的做法;4.28 中性包装neutral packing在出口商品及其内外包装上都不注明生产国别的包装;4.29 运输包装transport package以满足运输贮存要求为主要目的的包装;它具有保障产品的安全,方便储运装卸,加速交接、点验等作用; GB/T 4122.1-1996中2.54.30 托盘包装palletizing以托盘为承载物,将包装件或产品堆码在托盘上,通过捆扎、裹包或胶粘等方法加以固定,形成一个搬运单元,以便用机械设备搬运; GB/T 4122.1-1996中2.174.31 集装化containerization用集装器具或采用捆扎方法,把物品组成标准规格的单元货件,以加快装卸、搬运、储存、运输等物流活动;4.32 散装化containerization用专门机械、器具进行运输、装卸的散装物品在某个物流范围内,不用任何包装,长期固定采用吸扬、抓斗等机械、器具进行装卸、运输、储存的作业方式;4.33 直接换装cross docking物品在物流环节中,不经过中间仓库或站点,直接从一个运输工具换载到另一个运输工具的物流衔接方式;4.34 配送distribution在经济合理区域范围内,根据用户要求,对物品进行拣选、加工、包装、分割、组配等作业,并按时送达指定地点的物流活动;4.35 共同配送joint distribution由多个企业联合组织实施的配送活动;4.36 配送中心distribution center从事配送业务的物流场所或组织,应基本符合下列要求:a 主要为特定的用户服务;b 配送功能健全;c 完善的信息网络;d 辐射范围小;e 多品种、小批量;f 以配送为主,储存为辅;4.37 分拣sorting将物品按品种、出入库先后顺序进行分门别类推放的作业;4.38 拣选order picking按订单或出库单的要求,从储存场所选出物品,并放置指定地点的作业;4.39 集货goods collection将分散的或小批量的物品集中起来,以便进行运输、配送的作业;4.40 组配assembly配送前,根据物品的流量、流向及运输工具的载质量和容积,组织安排物品装载的作业; 4.41 流通加工distribution processing物品在从生产地到使用地的过程中,根据需要施加包装、分割、计量、分拣、刷标志、拴标签、组装等简单作业的总称;4.42 冷链cold chain为保持新鲜食品及冷冻食品等的品质,使其在从生产到消费的过程中,始终处于低温状态的配有专门设备的物流网络;4.43 检验inspection根据合同或标准,对标的物品的品质、数量、包装等进行检查、验收的总称;物流技术装备与设施术语5.1 仓库warehouse保管、储存物品的建筑物和场所的总称;5.2 库房storehouse有屋顶和围护结构,供储存各种物品的封闭式建筑物;5.3 自动化仓库automatic warehouse由电子计算机进行管理和的控制,不需人工搬运作业,而实现收发作业的仓库;5.4立体仓库stereoscopic warehouse采用高层货架配以货箱或托盘储存货物,用巷道队垛起重机及其他机械进行作业的仓库; 5.5 虚拟仓库virtual warehouse建立在计算机和网络通讯技术基础上,进行物品储存、保管和远程控制的物流设施;可实现不同状态、空间、时间、货主的有效调度和统一管理; 5.6保税仓库boned warehouse经海关批准,在海关监管下,专供存放未办理关税手续而入境或过境货物的场所;5.7 出口监管仓库export supervised warehouse经海关批准,在海关监管下,存放已按规定领取了出口货物许可证或批件,已对外买断结汇并向海关办完全部出口海关手续的货物的专用仓库;5.8 海关监管货物cargo under custom's supervision在海关批准范围内接受海关查验的进出口、过境、转运、通关货物,以及保税货物和其他尚未办结海关手续的进出境货物;5.9 冷藏区chill space仓库的一个区域,其温度保持在0'C~10.C范围内;5.10 冷冻区freeze space仓库的一个区域,其温度保持在0'C以下;5.11 控湿储存区humidity controlled space仓库内配有湿度调制设备,使内部湿度可调的库房区域;5.12 温度可控区temperature controlled space温度可根据需要调整在一定范围内的库房区域;5.13 收货区receiving space到库物品入库前核对检查及进库准备的地区;5.14 发货区shipping space物品集中待运地区;5.15 料棚goods shed供储存某些物品的简易建筑物,一般没有或只有部分围壁;5.16 货场goods yard用于存放某些物品的露天场地;5.17 货架goods shelf用支架、隔板或托架组成的立体储存货物的设施;5.18 托盘pallet用于集装、堆放、搬运和运输的放置作为单元负荷的货物和制品的水平平台装置;GB/T 4122.1-1996中4.275.19 叉车fork lift truck具有各种叉具,能够对货物进行升降和移动以及装卸作业的搬运车辆;5.20 输送机conveyor对物品进行连续运送的机械;5.21 自动导引车automatic guided vehicle AGV能够自动行驶到指定地点的无轨搬运车辆;5.22 箱式车box car除具备普通车的一切机械性能外,还必须具备全封闭的箱式车身和便于装卸作业的车门; 5.23 集装箱container是一种运输设备,应满足下列要求:a 具有足够的强度,可长期反复使用;b 适于一种或多种运输方式运送,途中转运时,箱内货物不需换装;c 具有快速装卸和搬运的装置,特别便于从一种运输方式转移到另一种运输方式;d 便于货物装满和卸空;e 具有1立方米及以上的容积;集装箱这一术语不包括车辆和一般包装; GB/T 1992-1985中1.15.24 换算箱twenty-feet equivalent unit TEU又称标准箱;Twenty-feet equivalent unit TEU以20英尺集装箱作为换算单位;GB/T 17271-1998中3.2.4.85.25 特种货物集装箱specific cargo container用以装运特种物品用的集装箱; GB/T 4122.1-1996中1.15.26 全集装箱船full container ship舱内设有固定式或活动式的格栅结构,舱盖上和甲板上设置固定集装箱的系紧装置, 便于集装箱左翼及定位的船舶;GB/T GB/T17271-1998中3.1.1.15.27 铁路集装箱场railway container yard进行集装箱承运、交付、装卸、堆存、装拆箱、门到门作业,组织集装箱专列等作业的场所;GB/T GB/T17271-1998中3.1.3.65.28 公路集装箱中转站inland container depot具有集装箱中转运输与门到门运输和集装箱货物的拆箱、装箱、仓储和接取、送达、装卸、堆存的场所;GB/T GB/T17271-1998中3.1.3.95.29 集装箱货运站container freight station CFS拼箱货物拆箱、装箱、办理交接的场所;5.30 集装箱码头container terminal专供停靠集装箱船、装卸集装箱用的码头;GB/T GB/T 17271-1998中3.1.2.25.31 国际铁路联运international through railway transport使用一份统一的国际铁路联运票据,由跨国铁路承运人办理两国或两国以上铁路的全程运输,并承担运输责任的一种连贯运输方式;5.32 国际多式联运international multimodal transport按照多式联运合同,以至少两种不同的运输方式,由多式联运经营人将货物从一国境内的接管地点运至另一国境内指定交付地点的货物运输;5.33 大陆桥运输land bridge transport用横贯大陆的铁路或公路作为中间桥梁,将大陆两端的海洋运输连接起来的连贯运输方式; 5.34 班轮运输liner transport在固定的航线上,以既定的港口顺序,按照事先公布的船期表航行的水上运输方式;5.35 租船运输shipping by chartering根据协议,租船人向船舶所有人租凭船舶用于货物运输,并按商定运价,向船舶所有人支付运费或租金的运输方式;5.36 船务代理shipping agency根据承运人的委托,代办与船舶进出有关的业务活动;5.37 国际货运代理international freight forwarding agent接受进出口货物收货人、发货人的委托,以委托人或自己的名义,为委托人办理国际货物运输及相关业务,并收取劳务报酬的经济组织;5.38 理货tally货物装卸中,对照货物运输票据进行的理点数、计量、检查残缺、指导装舱积载、核对标记、检查包装、分票、分标志和现场签证等工作;5.39 国际货物运输保险international transportation cargo insurance在国际贸易中,以国际运输中的货物为保险标的的保险,以对自然灾害和意外事故所造成的财产损失获得补偿;5.40 报关customs declaration由进出口货物的收发货人或其代理人向海关办理进出境手续的全过程;5.41 报关行customs broker专门代办进出境保管业务的企业;5.42 进出口商品检验commodity inspection确定进出口商品的品质、规格、重量、数量、包装、安全性能、卫生方面的指标及装运技术和装运条件等项目实施检验和鉴定,以确定其是否与贸易合同、有关标准规定一致,是否符合进出口国有关法律和行政法规的规定;简称"商检";物流管理术语6.1 物流战略logistics strategy为寻求物流的可持续发展,就物流发展目标以及达成目标的途径与手段而制定的长远性、全局性的规划与谋略;6.2 物流战略管理logistics strategy management物流组织根据已制定的物流战略,付诸实施和控制的过程;6.3 仓库管理warehouse management对库存物品和仓库设施及其布局等进行规划、控制的活动;6.4仓库布局warehouse layout在一定区域或库区内,对仓库的数量、规模、地理位置和仓库设施、道路等各要素进行科学规划和总体设计;6.5 库存控制inventory control在保障供应的前提下,使库存物品的数量最少进行的有效管理的技术经济措施;6.6 经济订货批量economic order quantity EOQ通过平衡采购进货成本和保管仓储成本核算,以实现总库存成本最低的最佳订货量;6.7定量订货方式fixed-quantity system FQS当库存量下降到预定的最低的库存数量订货点时,按规定数量一般以经济订货批量为标准进行订货补充的一种库存管理方式;6.8 定期订货方式fixed-quantity system FIS按预先确定的订货间隔期间进行订货补充的一种库存管理方式;6.9 ABC分类管理ABC classification将库存物品按品种和占用资金的多少分为特别重要的库存A类、一般重要的库存B类和不重要的库存C类三个等级,然后针对不同等级分别进行管理与控制;6.10 电子订货系统Electronic order system EOS不同组织间利用通讯网络和终端设备以在线联结方式进行订货作业与订货信息交换的体系; 6.11 准时制just in time JIT在精确测定生产各工艺环节作业效率的前提下按订单准确的计划,消除一切无效作业与浪费为目标的一种管理模式;6.12 准时制物流just-in-time logistics一种建立在JIT管理理念基础上的现代物流方式;6.13 零库存技术zero-inventory logistics在生产与流通领域按照JIT组织物资供应,使整个过程库存最小化的技术的总称;6.14 物流成本管理logistics cost control对物流相关费用进行的计划、协调与控制;6.15 物料需要计划material requirements planning MRP一种工业制造企业内的物资计划管理模式;根据产品结构各层次物品的从属和数量关系,以每个物品为计划对象,以完工日期为时间基准倒排计划,按提前期长短区别各个物品下达计划时间的先后顺序;6.16 制造资源计划manufacturing resource planning MRP II从整体最优的角度出发,运用科学的方法,对企业的各种制造资源和企业生产经营各环节实行合理有效地计划、组织、控制和协调,达到既能连续均衡生产,又能最大限度地降低各种物品的库存量,进而提高企业经济效益的管理方法;6.17 配送需要计划distribution requirements planning DRP一种既保证有效地满足市场需要,又使得物流资源配置费用最省的计划方法,是MRP原理与方法在物品配送中的运用;6.18 配送资源计划distribution resource planning DRP II一种企业内物品配送计划系统管理模式;是在DRP的基础上提高各环节的物流能力,达到系统优化运行的目的;6.19 物流资源计划logistics resource planning LRP以物流为基础手段,打破生产与流通界限,集成制造资源计划、分销需要计划以及功能计划而形成的物资资源优化配置方法;6.20 企业资源计划enterprise resource planning ERP在MRP II 的基础上,通过反馈的物流和反馈的信息流、资金流,把客户需要和企业内部的生产经营活动以及供应商的资源整合在一起,体现完全按用户需要进行经营管理的一种全新的管理方法;6.21 供应链管理supply chain management SCM利用计算机网络技术全面规划供应链中的商流、物流、信息流、资金流等,并进行计划、组织、协调与控制;6.22 快速反映Quick response QR物流企业面对多品种、小批量的买方市场,不是储备了"产品",而是准备了各种"要素",在用户提出要求时,能以最快速度抽取"要素",及时"组装",提供所需服务或产品;6.23 有效客户反映efficient customer responseECR以满足顾客要求和最大限度降低物流过程费用为原则,能及时做出准确反应,使提供的物品供应或服务流程最佳化的一种供应链管理战略;6.24 连续库存补充计划continuous replenishment program CRP利用及时准确的销售时点信息确定已销售的商品数量,根据零售商或批发商的库存信息和预先规定的库存补充程序确定发货补充数量和配送时间的计划方法;6.25 计算机付诸订货系统computer assisted ordering CAO基于库存和客户需要信息,利用计算机进行自动订货管理的系统;6.26 供应商管理库存vendor managed inventory VMI供应商等上游企业基于其下游客户的生产经营、库存信息,对下游客户的库存进行管理与控制;6.27 业务外包outsourcing企业为了获得不单纯利用不、内部资源更多的竞争优势,将其非核心业务交由合作企业完成; 资料来源:http://vip.6to23/our56/study/html/tjzl/wlbz/wlglsy.htm。
弗兰克盖瑞麻省理工学院斯塔塔中心
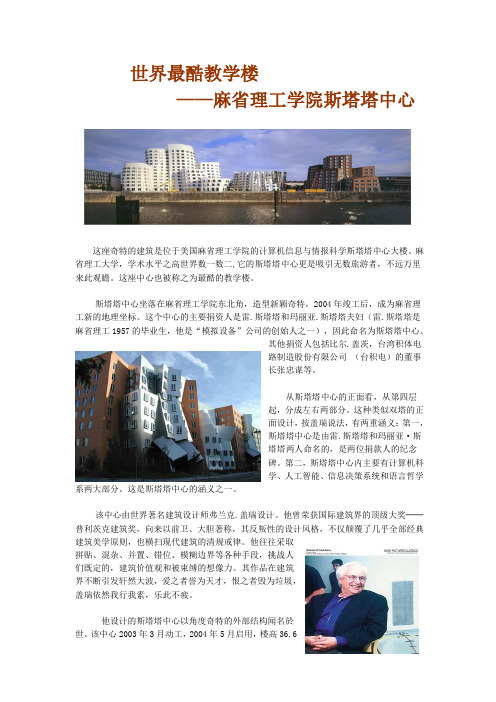
世界最酷教学楼——麻省理工学院斯塔塔中心这座奇特的建筑是位于美国麻省理工学院的计算机信息与情报科学斯塔塔中心大楼。
麻省理工大学,学术水平之高世界数一数二,它的斯塔塔中心更是吸引无数旅游者,不远万里来此观瞻。
这座中心也被称之为最酷的教学楼。
斯塔塔中心坐落在麻省理工学院东北角,造型新颖奇特,2004年竣工后,成为麻省理工新的地理坐标。
这个中心的主要捐资人是雷.斯塔塔和玛丽亚.斯塔塔夫妇(雷.斯塔塔是麻省理工1957的毕业生,他是“模拟设备”公司的创始人之一),因此命名为斯塔塔中心。
其他捐资人包括比尔.盖茨,台湾积体电路制造股份有限公司(台积电)的董事长张忠谋等。
从斯塔塔中心的正面看,从第四层起,分成左右两部分。
这种类似双塔的正面设计,按盖瑞说法,有两重涵义:第一,斯塔塔中心是由雷.斯塔塔和玛丽亚·斯塔塔两人命名的,是两位捐款人的纪念碑。
第二,斯塔塔中心内主要有计算机科学、人工智能、信息决策系统和语言哲学系两大部分。
这是斯塔塔中心的涵义之一。
该中心由世界著名建筑设计师弗兰克.盖瑞设计。
他曾荣获国际建筑界的顶级大奖──普利茨克建筑奖,向来以前卫、大胆著称,其反叛性的设计风格,不仅颠覆了几乎全部经典建筑美学原则,也横扫现代建筑的清规戒律。
他往往采取拼贴、混杂、并置、错位、模糊边界等各种手段,挑战人们既定的,建筑价值观和被束缚的想像力。
其作品在建筑界不断引发轩然大波,爱之者誉为天才,恨之者毁为垃圾,盖瑞依然我行我素,乐此不疲。
他设计的斯塔塔中心以角度奇特的外部结构闻名於世。
该中心2003年3月动工,2004年5月启用,楼高36.6米,地上9层,地下3层,建筑面积4万平方米,使用了1179吨钢筋,12万吨水泥,12800片不绣钢,100万块砖,6586平方米玻璃,埋设管线72英里长。
耗资3亿美元,仅设计费就高达1500万美元。
一天下雨,一群麻省理工学院的教授去参观毕堡的工地,他们认为这奇形怪状的设计一定会漏水,结果整个工地都看不到接雨水的水桶。
不同科技学科单词

colon n.冒号dash n.连接号comma n.逗号underscore n.下划线discipline n.学科fundamental s n.基本原理corollary n.推论assume v.假设assessment n.评估assignment n.任务access n.通道入口v.接近accurate adj.准确的精确的analysis n.分析elementary adj.基础的algebra n.代数calculus n.微积分probability n.概率论prescribe v.规定指示开药方protocol n. (数据传输)协议laboratory n. 实验课conduct v.组织实施指挥enforce v.实施强迫fundamental adj.基本的comprehensive adj.综合的comprehension n.理解力complement n.补充second half 下半场revise v.复习修正reinforce v.增强review v.复习notify v.通知公告notification n. 通知subsequent adj.随后的curriculum n.课程circuit n.电路v. 环行router n.路由器server n.服务器projector n.投影仪analogous adj.类似的analogue adj.模拟的n.类似物analogy n.类比propagate v.传播普及繁衍accelerate v.加速framework n.结构框架dispensable adj.非必需的indispensable adj.必不可少的terminology n.术语deploy v.部署有效利用module n.单元模块modulate v.调制调节modulation n.调制model n/v. 模型做模型建模modem 等于modulator-demodulator n.调制解调器cellular adj.蜂窝的细胞的interference n.干涉干扰slide n.幻灯片v.滑动降低slice v./n.薄片切precise adj.精确的heterogeneous adj.多种多样由不同组成的homogeneous adj.同类的由相同组成的(uniform)无线通信:spectrum n.谱频谱声谱spectral adj.domain n.范围领域定义域域time domain时域frequency domain频域transmit v.传输传播发射transmitter n.发射机receiver n.接收机binary adj.二进制的bipolar adj.两极的双极性的repeater n.中继器转发器electromagnetic noise电磁干扰electromagnetic wave 电磁波interfere v.干扰阻碍interference n.interval n.间隔conjugate adj.共轭的distort v.扭曲失真distortion n.失真variance n.方差变化不一致variation n.变化mean n.平均值standard deviation 标准差covariance n.协方差integration n.积分integrate v.使结合一体化求积分derivation n.导数derivate v.派生衍生求导derive v.导出源于获得corrupted adj.损坏的腐败的modulation n.调制demodulation n.解调amplitude n.振幅广阔丰富detection n.检测检波imaginary part 虚部real part 实部imaginary adj.虚构的想象的虚部的proximity n.接近临近proximate adj.近似的最接近的obstruct v.阻塞阻碍obstructed adj. unobstructed adj.decay v.腐朽衰败衰落attenuation n.衰减attenuate v.antenna gain 天线增益unitless 无单位的partition n./v.分裂隔板隔开random variable 随机变量conductor n.导体指挥检票员fluctuate v.波动carrier n.载波inter-symbol interference 符号间干扰ISIreplica n.复制副本overlap n./v.重叠convolution n.卷积convolute v.回旋卷绕discrete system 离散系统decompose v.分解腐烂sequence n.序列impulse n.脉冲一般指冲激信号velocity n.速率threshold n.阈值临界值coherent adj.相干的连贯的synchronize v.同步同时发生synchronization n.phase n.相位phasor n.矢量相量(包括幅度和角度)amplify v.放大增强dashed line虚线millisecond n.毫秒hexagon n.六角形prone adj.有...的倾向的易于...的deteriorate v.恶化退化sectorial adj.扇形的sectorization n.分段化扇形化sector n.扇形align v.校准对其一致alignment n.电信网络:topology n.拓扑学memory n.内存buffer n./v.缓存缓冲allocate v.分配指定拨出slot n./v.空挡位置idle adj./v.空闲的闲置的懒惰的congestion n.拥挤充血占线音congest v. busy tone 忙音processor n.处理器nodal adj.节点的encapsulation n.封装encapsulate v.压缩封入内部decapsulate v.解封装intermittent adj.间歇性的retrieve v.检索,恢复,取回identifer n.标识符proprietary adj.专有的专利的specification n.说明规范cleartext password 明文密码encrypt v.加密encryption n.intact adj.完好无损的integrate v.整合adj.完全的hierarchical adj.分层次的分等级的iterate v.迭代iteration n.recursive adj.递归的congest v.充血拥塞congestion n.idle adj./v.空闲的懒惰的encapsulate v.封装constrain v.约束constraint n.约束条件consent n./v.同意准许collision n.冲突collide v.reassemble v.重新装配fragment v./n.碎片片段payload n.有效负荷净负荷enumerate v.枚举列举数学相关:diagram n.图表v.用图表法histogram n.直方图柱状图exponential adj.指数的exponent n.指数orthogonal adj.正交的proportional adj.成比例的statistical adj.统计的integer n.整数constant n.常数variable n.变量symmetrical adj.对称的biased adj.偏的有偏见的bias n.偏见偏差arithmetic n./adj.算数算数的computation n.计算formula n.公式megabyte n.1MB mega百万10^6multi前缀多…multiple adj.多重的复杂的n.倍数multiply v.乘繁殖domain定义域range 值域slope n.斜率parameter n.参数加and/plus/added to 减minus/taken from/subtracted from subtraction减法4 plus 6 equals to 10. 8 minus 3 is 5.4 added to 6 is 10. 3 taken(subtracted) from 8 leaves 5.乘time/multiplied by 除divided to/into3 times 5 is 15. 8 into 24 equals 3.3 multiplies by 5 is 15. 24 divided by 8 is 3.3/4 three fourth s24/25 twenty-four twenty-fifth s10^7 the 7th power of 10 10 to the 7th powerx分之y y over xtranspose v.移项变换顺序转置multiplication n.相乘power n.幂4 to the power of 3. 4的3次方exponential adj./n.指数的logarithm n.对数logarithmic adj.initialization n.初始化probability n.概率proportional adj.成比例的linear adj.线性的nolinear adj.非线性的equation n.方程式fraction n.分数比例率coefficient n.系数denote v.表示指代(记为)threshold n.临界值阈值门槛converge v.趋于收敛于diameter n.直径weighted adj.加权的directed adj.有向的time-varying adj.时变的bifurcate v./adj. 分叉分支chaotic adj.无序的混沌的mutual adj.相互的共有的internal adj.内部的国内的external adj.外部的国外的fractal n.不规则形分形adjacent adj.相邻的shift v.移动替换transition n.转变过渡discrete adj.离散的分离的column n.列圆柱row n.行cylinder n.圆柱体identical adj.同一的identity n.同一性身份identify v.识别等同于geometric n.几何的denominator n.分母numerator n.分子2D continuous function 二维连续函数origin n.原点开端起源coordinate system 坐标系diagonal n./adj.对角线斜线density n.密度dense adj.稠密的密度大的normalized adj.标准化归一化dimensionless n.无穷小量dimension n.方面维3Dinverse adj./n.相反的倒转的倒数reciprocal n./adj.倒数的相互的交互的product n.乘积normal distribution 正态分布square n./adj.平方正方形monotonic adj.单调的argument n.自变量binomial n./adj. 二项式binomial distribution 二项分布inequality n.不等式不平等intersection n.交集交叉点intersect v.相交交叉横穿union n.并集编程相关:syntax n.语法句法tuple n. 数组set n.集合array n.数组package n.软件包extract n./v.提取摘录matrix n.矩阵loop n.循环iterate v.迭代execute v.执行function n.函数parameter n.参数segment n.段部分v.分割划分algorithm n.算法conjecture n.猜想theory n.理论theorem n.定理colon n.冒号interface n.界面v.连接交流图像处理:format n.格式v.格式化formation n.形成组成extract v.提取convert v.转变转换merge v.合并split v.分离划分slice v.切割RGB和BGR蓝绿红ROI: region of interestpixel n.像素photosite n.像素attribute n.属性variable n.变量element n.元素要素degrade v.退化降低degradation n.compress v.压缩compression n.压缩deburr v.清理毛刺blur n./v.模糊motion n./v.运动移动Spatial quantization 空间的量化intensity n.强度intense adj.强烈的紧张的激烈的inpainting n.图像修复texture n.质地实质纹理segment v.分割划分segmentation n.分割partition v.分割partitioning n.extract v.提取storage n.储存transmit v.传输发送transfer v.转移translate v.翻译shift v.转移换convert v.转变换算transition n.过渡转变transit v.运送经过lossy adj.有损耗的lossy compression 有损压缩acquire v.获得acquisition n.获得采集capture v.采集捕捉引起sensor n.传感器individual n.个人adj.单独的charge v./n.收费充电电荷accumulate v.累积horizontal adj./n.水平的水平面horizon n.地平线vertical adj./n.垂直的垂直线vertex n.顶点voltage n.电压volume n.体积amplify v.放大增强register v./n.注册登记显示shift register n.移位寄存器interpolate v.篡改插入mosaic n./v.马赛克demosaic v.去马赛克illuminate v.照亮阐明illumination n.光源灯饰启示illustrate v.举例说明digital adj.数字的digitize v.数字化analog n./adj.模拟analog image 模拟图像index n.索引(复数indexes/indices)denote v. 表示指示标志imply v.表示暗示donate v.捐赠sample n./v. 采样取样quantization n.量化quantize v.scan v./n.扫描discrete adj.分离的离散的continuous adj.连续的coordinate v.协作搭配n.坐标coordinate system 坐标系resolution n.解决决心分辨率interpolation n.插入插值填写interpolate v.resize v.调整大小real-time 实时的ultrasound n.超声波capacitor n.电容器circuit n.电路回路环线circuitry n.电路电路图prism n.棱镜棱柱contour n./v.轮廓边界线abrupt adj.突然的不连贯的tuple n.元组hue n.色调saturation n.饱和度offset n.偏移量gain n.增益clip v.剪掉裁剪template n.样板模板intermediate adj./n.中间的中间事物intermediate image 中间过渡图像eliminate v.消除淘汰flip v.反转打开overlap v.重叠superimpose v.叠加magnitude n.大小数值periodic adj.周期的series n.级数系列mitigate v.减轻缓和ramp n.斜坡坡道渐变notate v.以符号标记notation n.记法符号conjugate v./adj./n.共轭complex conjugate 复共轭harmonics n.谐波impulse train冲击序列translation v.平移翻译replica n.复制副本dilated adj.扩大膨胀dilate v. dilation n.sinusoid 正弦曲线aliasing n.混叠wrap v./n.包裹环绕围巾卷饼wraparound error 环绕错误suppress v.抑制阻止mitigate v.使减轻使缓和transition n.过渡转变transit v.运输经过agenda n.议程表待议日程arithmetic n.算数运算arithmetical adj. algorithm n.算法geometry n.几何geometric adj. medium adj.中间的五分熟的平均的median adj./n.中间值中位数prior adj.先前的正式的prior probability先验概率matrix n.矩阵metric n.度量标准adj.十进制的trim v.修剪调整emit v.发出发射beam n.光线波束project v.投射预测projection n.投影diffuse v./adj.扩散弥漫漫反射传播synchronous adj.同步的synchrony n.intercept n./v.截距拦截截断slope n./v.斜率倾斜斜坡vector n.矢量向量unit vector单位向量prime n.上标撇slash n.斜杠arbitrary adj.任意的recap n.扼要重述preliminary adj./n.初步的预赛transpose n./v.转置调换erode v.腐蚀削弱erosion n.腐蚀dilate v.膨胀扩大dilation n.膨胀shrink v.缩水缩小减少fracture v.断裂破碎duality n.二元性对偶性optimize v.优化optimal adj.最佳的合适的speckled adj.有斑点的speckle n./v.斑点色斑做标记多维数据:regress v./n..倒退回归regression n.回归set v.放n.集合anomaly n.异常asymmetric adj.不对称的sparse adj.稀疏的sparsity n.稀疏性symmetry n.对称相似induce v.引起诱使inductive adj.归纳的诱导的induction n.归纳感应deduct v.演绎扣除deduction n.推论split v./n.分割划分sort v./n.分类排序permute v.改变顺序permutation n.categorize v.分类category n. categorical adj.分类的绝对的numeric adj.数值的quantitative adj.定量的数量的qualitative adj.定性的质量的autocorrelation 自相关temporal autocorrelation 时间自相关temporal adj.时间的暂时的redundant adj.多余的冗余converge v.收敛聚集convergence n.复杂网络:homogeneous adj.单一的均匀的同质的isomorphic adj.同构的同形的isomorphism n.bipartite adj.双向的二分的invertible adj.可逆的traverse v.穿过横越yield v./n.产生出产产量skeleton n.骨骼框架梗概backbone n.脊柱骨干initial adj.最初的首字母outlier n.离群值异常值局外人consensus n.共识一致看法counterclockwise 逆时针clockwise顺时针equilibrate v.使平衡equilibrium n.均衡平衡rational adj.理智的hierarchies n.层级分层分类sparse adj.稀疏的稀少的benchmark n.比较基准synchrony n.同步synchronization n.同时性同步性consensus n.共识检测估计:hypothesis n.假设猜想scenario n.场景terminology n.术语interpolate v.插入篡改defect n.缺点v.背叛crude adj.粗略的粗糙的abrupt adj.突然的陡峭的唐突的asymptotic adj.渐进的渐近线的marginal adj.边缘的微不足道的marginal probability边缘概率prior probability先验概率conditional probability条件概率posterior probability后验概率hypothesis testing假设检验ground truth真实值decision region决策域disjoint adj.不相交的overlap adj.重叠的curvature n.弧线曲率concave adj.凹的power spectral density能量谱密度inner product 内积点积norm 模transpose v.调换n.转置矩阵determinant n./adj.决定因素行列式subscript n./adj.下标注脚Wide Sense Stationary 广义平稳time invariant时不变discretize v.离散discrete adj.离散的distort v.失真扭曲superimpose v.叠加compose v.组成构成移动APP:tablet n.药片平板电脑agenda n.待议事项议事日程kernel n.核内核compiler n.编译器compile v.汇编编译搜集manifest adj./n.表明显示清单configurate v.配置使形成obfuscate v.使模糊混淆refine v.改进精炼virtual adj.虚拟的实际上的device driver 设备驱动程序accelerate v.加速促进template n.模板样板compact adj./n.紧凑的简洁的deploy v.部署调动配置refactor v./n.重构configure v.配置config=configuration n.配置install v.安装icon n.图标palette n.调色板选项板compatible adj.兼容的可共处的execute v.执行实施prototype v./n.原型雏形widget n.小工具窗口小部件toggle n./v.切换转换(键)embed v.嵌入内置portrait adj.纵向的n.肖像描绘纵向打印格式vertical adj.垂直的纵向的landscape adj.横向打印格式n.风景横向打印格式v.景观美化horizontal adj.水平的chaos n.混乱无序状态chaotic adj.混乱的enclose v.封装围住封上nest v./n.鸟巢嵌套一套物件align v.对齐使一致margin v./n.边缘利润余地custom n.顾客惯例adj.定做的自定义的current adj.当前的流行的n.水流concurrency n.并发性并行性thread n.线程v.穿起来asynchronous adj.异步的instantiate v.举例说明invoke v.调用提及引起sequential adj.按顺序的相继发生的dispatch n./v.派遣发送迅速处理parse v.分析解析immutable adj.不可改变的mutable adj.可变的易变的explicit adj.明确的详述的implicit adj.含蓄的facilitate v.促进使便利synchronize v.同步grant v./n.承认给予授予engage v.从事雇佣pane n.玻璃窗格repository n.数据库储藏室资源库retrieve n.找回检索refactor v./n.重构resume v.恢复重新开始customize v.定制排队论:stochastic adj.随机的stochastic process 随机过程swap v.交换替换constraint n.约束条件constrain v.约束限制强迫moderate adj.适中的温和的中等的regime n.制度状态机制ethical adj.道德的plagiarize v.抄袭剽窃plagiarism n.mutually exclusive events 互斥事件mutual adj.相互的exclusive adj.昂贵的独有的排斥的rigorous adj.严格的严密的novel n.小说novelty adj./n.新颖的新奇的事物intersection n.交集相交交点在B的条件下A的概率the probability of A given Bposterior probability后验概率posterior adj.其次的较后的prior probability先验概率prior adj.先前的优先的axiom n.公理定理binomial n./adj.二项分布geometric n./adj.几何分布uniform distribution均匀分布recursion n.递归循环recur v.再发生反复出现arbitrary adj.任意的estimator n.估计量估计函数revise v./n.修正复习denominator n.分母numerator n.分子numerous adj.许多的fraction n.分数decimal n.小数integer n.整数expected value 期望standard deviation 标准差covariance n.协方差preliminary n./adj.初步的预备的准备工作identity n.身份特征同一性identical adj.同一的完全相同的stationary adj.不动的平稳的strictly stationary严格平稳ergodicity n. 遍历性各态历经性ergodic adj.multivariate adj.多元的多变量的superpose v.叠加叠放superposition n.叠加lag v./n.掉队延迟滞后consecutive adj.连续的derive v.起源于获得导出derivation n.求导导数validate v.正式确认生效物联网:mindset n.思维模式trend n.趋势风尚curriculum n.课程combat v.战斗争论block diagram 狂徒converge v.集中汇集convergence n.汇集融合immersive adj.沉浸式immerse v.沉浸于浸没resistor n.电阻resistance n.电阻(值)accelerate v.加速促进acceleration n.加速度accelerometer n.加速度计acoustic adj./n.声音的声学appliance n.家用电器actuator n.执行器驱动器actuate v.驱动促使velocity n.速度displacement n.位移gravity n.重力coordinate v./n.协调坐标magnetometer n.磁力计magnetic adj.磁性的axis n.轴对称轴calibrate v.校准calibration n.校准刻度vibrate v.震动vibration n.震动oscillate v.振荡oscillation n.振荡gearbox n.变速箱utilize v.利用使用日常:obsess v.痴迷blackout v.断电propagate v.传播繁殖grid n.格子lattice n.格子pervade v.遍及弥漫prominent adj.突出的杰出的tremendous adj.极大的极棒的intrinsic adj.内在的disordered adj.杂乱的错乱的convention n.约定协定condense v.压缩浓缩eliminate v.消除淘汰consensus n.一致同意initial adj.最初的字首的initialization n.初始化interrelated adj.相互关联的interpersonal adj.人与人之间的split v.分离skip v.跳过conform v.遵守符合顺应cluster n.群formation n.形成formative adj.形成的有重大影响的format v.格式化n.格式subtle adj.细微的敏感的verify v.核实查证vary v.变化variation n.变化variant adj.变化的vertical adj.垂直的duplicate n./v./adj.完全一样的复制implement v.实施penalty n.惩罚penalize v.惩罚capital n./adj.大写lowercase n./adj.小写specify v.具体指出specific adj.明确的特定的respective adj.各自的分别的estimate v.估计assign v.赋值分配assignment n.任务作业execute v.执行valid adj.有效的合法的vivid adj.生动的鲜艳的dynamic adj.动态的有活力的compose v. 组成撰写排版decompose v.分解腐烂spectrum n.范围频谱光谱perceptual adj.感知的有知觉的perception n.认知知觉洞察力absorb v.吸收掌握scope n.范围视野dissipate v.驱散挥霍mandatory adj.强制的tedious adj.单调乏味的allude v.略微提到暗指discern v辨别了解recognize v.识别承认decompose v.分解腐烂衰变deficient adj. deficiency n.不足缺陷interval n.间隔desirable adj.令人满意的满足需要的complement n./v.补充pros and cons(拉丁语) 优缺点nuts and bolts(螺母和螺栓) 基本组成部分aka (also known as)又叫做ultimate adj.最终的最重要的configuration n.布局配置configure v.安装形成hybrid n./adj.混合杂种immune adj.免疫的不受影响的layman n.外行门外汉exceed v.超越超过incoming adj.进来的进入的income n.收入alter v.改变修改alternate v./adj.交替轮流alternative adj./n.可选择的二选一alternatively adv.要不二择一on-demand adj.按需的emphasize v.强调negligible adj.可以忽略的precede v. 在之前的领先experiment v./n.实验尝试arbitrary adj.任意的suffice v.足够有能力sufficient adj.elastic adj.弹性的灵活的essentially adv.本质上实质上essential adj.必须的基本的excess adj./n.超额的过多的violate v.违反侵犯compose v.撰写组成排版compromise n./v.折中妥协intuitive adj.直觉的intuition n.直觉lengthy adj.冗长的过于详尽的grasp v./n.握紧领会characterize v.描述刻画convention n.习俗公约conventional adj.依照惯例的criterion n.标准规范criteria 复数interpret v.解释口译interpretation n.解释notation n.符号标记法mutual adj.相互的sketch v./n.绘制草图outage n.断电中断in all walks of life 在各行各业frontier n./adj.边境前沿embark v.开始着手上船possess v.具备拥有insight n.了解洞察力encounter v.遭遇碰到inherent adj.固有的内在的与生俱来的inherently adv. commonality n.共性sophisticated adj.复杂精妙的水平高的stepping stone 跳板垫脚石bracket n.括号圆括号square bracket 方括号superscript n.上角标hypothesis n.猜想假设submarine v./n./adj.海底的潜水艇。
二次根式的运算技巧或规律解题报告
二次根式的运算技巧或规律解题报告(中英文实用版)Report on Techniques and Rules for Solving Quadratic Roots在进行二次根式的运算时,我们经常会遇到各种复杂的情况。
其中,一些技巧和规律可以帮助我们更简洁、快速地解决问题。
In the process of operating quadratic roots, we often encounter various complex situations.Among them, some techniques and rules can help us solve problems more succinctly and quickly.首先,我们需要了解二次根式的基本性质。
例如,对于任意正实数a和b,有√(a*b) = √a * √b。
这个性质可以帮助我们在计算时将复杂的根式分解为简单的部分。
First of all, we need to understand the basic properties of quadratic roots.For example, for any positive real numbers a and b, we have √(a*b) = √a * √b.This property helps us decompose complex roots into simple parts during calculations.其次,我们需要掌握一些特殊的运算技巧。
例如,对于形如√(a^2 - b^2)的根式,我们可以利用差平方公式将其化简为(√a - √b)(√a + √b)。
这个技巧在解决一些特定问题时非常有用。
ext, we need to master some special operational techniques.For example, for expressions like √(a^2 - b^2), we can use the difference of squares formula to simplify it as (√a - √b)(√a + √b).This technique is very useful when solving specific problems.此外,我们还需要了解二次根式的运算顺序。
宇宙即计算~一种新科学:斯蒂芬沃尔夫勒姆
宇宙即计算~一种新科学:斯蒂芬·沃尔夫勒姆宇宙即计算~一种新科学:斯蒂芬·沃尔夫勒姆2017-02-02斯蒂芬·沃尔夫勒姆这个名字,在中文世界里可能远谈不上家喻户晓;但他的英文名Stephen Wolfram恐怕反而却要熟悉得多。
他是Mathematica软件的发明者和首席设计师,被广泛地认为是当今科学和计算技术中最重要的革新者之一。
大名鼎鼎的数学软件Mathematica每次启动的时候都会提醒你这是Wolfram出品Wolfram Alpha:下一代搜索引擎,历史上第一个实用的AI(/)。
WolframAlpha是开发计算数学应用软件的沃尔夫勒姆研究公司开发出的新一代的搜索引擎,能根据问题直接给出答案的网站,于2009年5月15日晚7点(美国中部当地时间,北京时间5月16日上午8点)提前上线,用户在搜索框键入需要查询的问题后,该搜索引擎将直接向用户返回答案,而不是返回一大堆网页链接。
它是基于Wolfram 早期旗舰产品Mathematica,一款囊括了计算机代数、符号和数值计算、可视化和统计功能的计算平台和工具包开发的。
其数据来源包括学术网站和出版物、商业网站和公司、科学机构等等,例如中央情报局出版物《世界概况》、康奈尔大学图书馆出版物《All AboutBirds》、《Chambers Biographical Dictionary》、道琼斯公司、CrunchBase、百思买、美国联邦航空管理局、美国地质调查局等。
从直接了当的数学问题(对x^2 sin^3x dx积分),到简单的逻辑问题(哪些书的名字里有“蓝”这个词),到物理和化学问题(ATP的电子式是什么,描述三维盒子中的自由粒子需要哪些变量和方程),甚至更一般性的知识问题(卡西尼探测器上携带了多少核燃料,林白单人飞越大西洋的起点和终点,1969年8月发生了哪些大事件),它都可以回答。
更重要的是,这些问题都可以用自然语言提出,无需懂计算机语言——当然像Siri一样接受调戏的能力也是有的(其实它比Siri早得多,甚至Siri应用了它的技术)。
Division and square root arithmetic unit

专利名称:Division and square root arithmetic unit 发明人:Uesugi, Takahiko申请号:EP05027390.3申请日:20051214公开号:EP1672481B1公开日:20081217专利内容由知识产权出版社提供摘要:A division and square root arithmetic unit carrying out a division operation of a higher radix and a square root extraction operation of a lower radix. A certain bit number (determined on the basis of a radix of an operation) of data selected from upper bits of the output of a carry save adder and the output of the adder are input to convert the data into twos complement representation data, and the twos complement representation data is shifted a certain bit number (determined on the basis of the radix of the operation) to use the shifted data for a partial remainder of the next digit. Hence, a large number of parts such as registers of a divisor and a partially extracted square root can be commonly used in a divider and a square root extractor to realize an effective and high performance arithmetic unit. Further, a radix of a division operation can be set higher than that of a square root extraction operation, and division processing performance can be largely improved. Further, in the square root extraction operation, the partial remainder previously shifted 1 bit to the right is prepared, and another partial remainder is operated from the 1 bit shifted partial remainder to set the shift bit number to the same as 2 bits shift to the left for the division operation. Hence, the twos complement converter can be commonly used in the division operation and the square root extraction operation without adding the selector in the return path of the data.Therefore, the lowering of the processing speed in the division operation and the square root extraction operation can be prevented in the division and square root arithmetic unit of the present invention.申请人:NEC CORP地址:JP国籍:JP代理机构:Vossius & Partner更多信息请下载全文后查看。
coop包的算法和基准文档说明书

Algorithms and Benchmarks for the coop PackageApril21,2019Drew Schmidt**********************Version0.6-2DisclaimerAny opinions,findings,and conclusions or recommendations expressed in this material are those only of the authors.Thefindings and conclusions in this article should not be construed to represent any determination or policy of University,Agency,Administration and National Laboratory.This manual may be incorrect or out-of-date.The author(s)assume no responsibility for errors or omissions,or for damages resulting from the use of the information contained herein.This publication was typeset using L A T E X.c 2015–2016Drew Schmidt.Permission is granted to make and distribute verbatim copies of this vignette and its source provided the copyright notice and this permission notice are preserved on all copies.Contents1Introduction11.1A Note on Sparse Operations (1)2The Algorithms with Notes on Implementation12.1Dense Matrix Input (1)2.2Dense Vector-Vector Input (2)2.3Sparse Matrix Input (2)3Benchmarks33.1Dense Matrix Input (3)3.2Dense Vector-Vector Input (3)3.3Sparse Matrix Input (4)References51IntroductionIn this document,we will introduce the algorithms underlying the coop package[3],and offer some benchmarks.In order to recreate the benchmarks here,one needs a compiler that supports OpenMP[2] and a high-performance BLAS library[1].See the other coop package vignette Introducing coop:Fast Covariance,Correlation,and Cosine Operations[4]for details.We do not bother to go into details for the covariance and correlation algorithms,because they are obvious and uninteresting.1.1A Note on Sparse OperationsOf the three operations,only cosine similarity currently has a sparse implementation.The short reason why is that the other two operations require centering and/or scaling.To better understand the problem,consider the5×20matrix whosefirst row is a row of ones,and all other rows consist entirely of zeros:12The original matrix is,obviously,95%sparse:1But if we center,the data,it becomes100%dense:12The Algorithms with Notes on ImplementationFor dense implementations,the performance should scale well,and the non-BLAS components will use multiple threads(if your compiler supports OpenMP)when the matrix has more than1000columns.Ad-ditionally,we try to use vector operations(using OpenMP’s simd construct)for additional performance;but you need a compiler that supports a relatively modern OpenMP standard for this.2.1Dense Matrix InputGiven an m×n matrix A(input)and an n×n matrix C(preallocated output):pute the upper triangle of the crossproduct C=t(A)%*%X using a symmetric rank-k update(the syrk BLAS function).2.Iterate over the upper triangle of C:(a)Divide its off-diagonal values by the square root of the product of its i’th and j’th diagonalentries.(b)Replace its diagonal values with1.3.Copy the upper triangle of C onto its lower triangle.The total number of floating point operations is:1.mn (n +1)for the symmetric rank-k update.2.3n (n +1)2for the rescaling operation.The algorithmic complexity is O (mn 2),and is dominated by the symmetric rank-k update.The storage complexity,ignoring the required allocation of outputs (namely the C matrix),is O (1).2.2Dense Vector-Vector InputGiven two n -length vectors x and y (inputs):pute crossprod =t(x)%*%y (using the gemm BLAS function).pute the square of the Euclidean norms of x and y (using the syrk BLAS function).3.Divide crossprod from 1by the square root of the product of the norms from 2.The total number of floating point operations is:1.2n −1for the crossproduct.2.4∗n −2for the two (square)norms.3.3for the division and square root/product.The algorithmic complexity is O (n ).The storage complexity is O (1).2.3Sparse Matrix InputGiven an m ×n sparse matrix A stored as a COO with row/column indices i and j where they are sorted by columns first,then rows ,and corresponding data vector a (inputs),and given a preallocated n ×n dense matrix C (output):1.Initialize C to 0.2.For each non-zero column j of the conceptually dense matrix A (call it x ),find its first and final position in the COO storage.(a)If x is missing (its entries are all 0),set the j ’th row and column of the lower triangle of C toNaN (for compatibility with dense routines).Go to 2.(b)Otherwise,for each column i >j of a (call it y ),find its first and final position in the COOstorage.(c)Compute the dot product of x and y ,x ·y .(d)If x ˙y > (epsilon=1e-10for us):•Compute the dot products of x with itself x ·x and y with itself y ·y .•Set the (i,j )’th entry of C to x ·y √x ·x √y ·y.3.Copy the lower triangle to the upper and set the diagonal to1.The worst case runtime complexity occurs when the matrix is dense but stored as a sparse matrix,and is O(mn2),the same as in the dense case.However,this will cause serious cache thrashing,and the performance will be abysmal.The function stores the j’th column data and its row indices in temporary storage for better cache access patterns.Best case,this requires12KiB of additional storage,with8for the data and4for the indices.Worse case(an all-dense column),this balloons up to12m.The storage complexity is best case O(1), and worst case O(m).3BenchmarksThe source code for all benchmarks presented here can be found in the source tree of this package under inst/benchmarks/,or in the binary installation under benchmarks/.All benchmarks were performed using:•R3.2.2•OpenBLAS•gcc5.2.1•4cores of a Core i5-2500K CPU@3.30GHzThroughout the benchmarks,we will use the following packages and data:1233.1Dense Matrix InputCompared to the version in the lsa package(as of27-Oct-2015),this implementation performs quite well:123456783.2Dense Vector-Vector InputHere the two perform identically:123456783.3Sparse Matrix InputBenchmarking sparse matrix methods can be more challenging than with dense for a variety of reasons, chief among them being that the level of sparsity can make an enormous impact in performance.We present two cases here of varying levels of sparsity.First,we will generate a0.1%dense/99.9% sparse matrix:1234This gives us a fairly dramatic difference in storage:1234So the dense matrix needs roughly479times as much storage for the exact same data.In such very sparse cases,the sparse implementation will perform quite nicely:1234Note that this is a3-fold speedup over our already highly optimized implementation.This is quite nice, especially considering the sparse implementation uses only one thread and limited vectorization,while the dense one uses4threads and vectorization.However,as the matrix becomes more dense(and it doesn’t take much),dense methods begin to perform better:1234567REFERENCES5of58910111213While the sparse implementation performs significantly worse than the dense one for this level of sparsity and data size,note that the memory usage for the dense case is greater than that of the sparse by a factor of50.It is hard to give perfect advice for when to use a dense or sparse method,but a general rule of thumb is that if you have more than5%non-zero data,definitely use dense methods.For1-5%,there is a memory/runtime tradeoffworth considering;if you can comfortably store the matrix densely,then by all means use dense methods.For data<1%dense,sparse methods will generally have better runtime performance than dense methods.References[1]Chuck L Lawson,Richard J.Hanson,David R Kincaid,and Fred T.Krogh.Basic linear algebrasubprograms for fortran usage.ACM Transactions on Mathematical Software(TOMS),5(3):308–323, 1979.[2]OpenMP Architecture Review Board.OpenMP application program interface version4.0,July2013.[3]Drew Schmidt.Co-Operation:Fast Correlation,Covariance,and Cosine Similarity,2016.R packageversion0.6-0.[4]Drew Schmidt.Introducing coop:Fast Covariance,Correlation,and Cosine Operations,2016.RVignette.。
美国中小学课本学各科词汇pdf

美国中小学学科词汇以下是一些美国中小学教育课本中包含的学科词汇,涵盖数学、科学、社会科学、语言文学等方面,共计300个,并附有中文翻译。
数学:1. addition(加法)2. subtraction(减法)3. multiplication(乘法)4. division(除法)5. fraction(分数)6. decimal(小数)7. geometry(几何学)8. algebra(代数学)9. equation(方程式)10. variable(变量)11. coordinate(坐标)12. function(函数)13. exponent(指数)14. square root(平方根)15. triangle(三角形)16. circle(圆形)17. square(正方形)18. rectangle(矩形)19. cube(立方体)20. cylinder(圆柱体)科学:21. science(科学)22. biology(生物学)23. chemistry(化学)24. physics(物理学)25. earth science(地球科学)26. ecology(生态学)27. geology(地质学)28. astronomy(天文学)29. atmosphere(大气层)30. ecosystem(生态系统)31. photosynthesis(光合作用)32. cell(细胞)33. DNA(脱氧核糖核酸)34. gene(基因)35. energy(能量)36. force(力)37. motion(运动)38. gravity(重力)39. velocity(速度)40. acceleration(加速度)41. sound(声音)42. light(光)43. magnetism(磁力)44. electricity(电力)45. fossil fuels(化石燃料)社会科学:46. social studies(社会学科)47. history(历史)48. geography(地理学)49. economics(经济学)50. politics(政治学)51. democracy(民主制度)52. dictatorship(独裁统治)53. monarchy(君主制)54. republic(共和制)55. citizen(公民)56. government(政府)57. law(法律)58. constitution(宪法)59. amendment(修正案)60. bill of rights(权利法案)61. human rights(人权)62. culture(文化)63. society(社会)64. immigration(移民)65. diversity(多样性)66. prejudice(偏见)67. discrimination(歧视)68. globalization(全球化)69. trade(贸易)70. market(市场)71. recession(经济衰退)72. inflation(通货膨胀)73. supply and demand(供求关系)74. budget(预算)75. investment(投资)76. profit(利润)77. interest(利息)78. tax(税)79. democracy(民主)80. communism(共产主义)语言文学:81. language arts(语言艺术)82. reading(阅读)83. writing(写作)84. literature(文学)85. poetry(诗歌)86. fiction(小说)87. non-fiction(非小说类文学)88. drama(戏剧)89. essay(散文)90. biography(传记)91. autobiography(自传)92. genre(文学体裁)93. plot(情节)94. character(角色)95. setting(背景)96. conflict(冲突)97. climax(高潮)98. resolution(结局)99. metaphor(隐喻)100. simile(明喻)101. personification(人格化)102. symbol(象征)103. alliteration(头韵)104. hyperbole(夸张)105. imagery(意象)106. theme(主题)107. protagonist(主角)108. antagonist(反派)109. point of view(视角)110. foreshadowing(铺垫)111. irony(反讽)112. satire(讽刺)113. analogy(类比)114. rhetoric(修辞)115. diction(措辞)艺术: 116. art(艺术)117. music(音乐)118. theater(剧场)119. dance(舞蹈)120. painting(绘画)121. sculpture(雕塑)122. architecture(建筑)123. symphony(交响乐)124. opera(歌剧)125. ballet(芭蕾舞)126. jazz(爵士乐)127. rhythm(节奏)128. melody(旋律)129. harmony(和谐)130. texture(质地)131. form(形式)132. perspective(透视)133. color(颜色)134. line(线条)135. shape(形状)136. composition(构图)137. movement(运动)138. expression(表达)139. interpretation(解释)140. performance(表演)体育: 141. physical education(体育教育)142. sports(体育运动)143. basketball(篮球)144. football(橄榄球)145. soccer(足球)146. baseball(棒球)147. volleyball(排球)148. tennis(网球)149. swimming(游泳)150. track and field(田径运动)151. gymnastics(体操)152. weightlifting(举重)153. cardio(有氧运动)154. strength training(力量训练)155. stretching(拉伸)156. warm-up(热身)157. cool-down(放松)158. endurance(耐力)159. speed(速度)160. agility(敏捷)健康: 161. health(健康)162. nutrition(营养)163. diet(饮食)164. exercise(锻炼)165. hygiene(卫生)166. disease(疾病)167. infection(感染)168. virus(病毒)169. bacteria(细菌)170. immunity(免疫力)171. vaccine(疫苗)172. symptom(症状)173. treatment(治疗)174. medication(药物)175. surgery(手术)176. injury(受伤)177. rehabilitation(康复)178. mental health(心理健康)179. stress(压力)180. anxiety(焦虑)181. depression(抑郁症)182. therapy(治疗)183. counseling(咨询)184. self-care(自我保健)185. addiction(成瘾)186. alcoholism(酗酒)187. substance abuse(药物滥用)188. smoking(吸烟)189. vaping(电子烟)190. sleep(睡眠)社会科学: 191. social studies(社会研究)192. history(历史)193. geography(地理)194. economics(经济学)195. politics(政治学)196. government(政府)197. democracy(民主)198. monarchy(君主制)199. communism(共产主义)200. capitalism(资本主义)201. socialism(社会主义)202. imperialism(帝国主义)203. colonialism(殖民主义)204. globalization(全球化)205. society(社会)206. culture(文化)207. language(语言)208. tradition(传统)209. custom(风俗习惯)210. etiquette(礼仪)技术: 211. technology(技术)212. computer science(计算机科学)213. programming(编程)214. software(软件)215. hardware(硬件)216. internet(互联网)217. network(网络)218. cybersecurity(网络安全)219. artificial intelligence(人工智能)220. virtual reality(虚拟现实)221. augmented reality(增强现实)222. data(数据)223. database(数据库)224. algorithm(算法)225. code(代码)226. encryption(加密)227. decryption(解密)228. user interface(用户界面)229. user experience(用户体验)230. innovation(创新)自然科学: 231. science(科学)232. physics(物理学)233. chemistry(化学)234. biology(生物学)235. astronomy(天文学)236. geology(地质学)237. ecology(生态学)238. environment(环境)239. climate(气候)240. weather(天气)241. energy(能源)242. electricity(电力)243. magnetism(磁力)244. gravity(重力)245. motion(运动)246. force(力)247. speed(速度)248. light(光)249. sound(声音)250. matter(物质)文学: 251. literature(文学)252. novel(小说)253. poetry(诗歌)254. drama(戏剧)255. fiction(小说)256. nonfiction(非小说类作品)257. biography(传记)258. autobiography(自传)259. memoir(回忆录)260. essay(散文)261. prose(散文)262. plot(情节)263. character(人物)264. setting(背景)265. theme(主题)266. symbol(象征)267. metaphor(隐喻)268. simile(比喻)269. allusion(暗示)270. imagery(意象)艺术: 271. art(艺术)272. visual arts(视觉艺术)273. painting(绘画)274. sculpture(雕塑)275. photography(摄影)276. film(电影)277. music(音乐)278. dance(舞蹈)279. theater(戏剧)280. performance(表演)281. actor(演员)282. actress(女演员)283. musician(音乐家)284. composer(作曲家)285. choreographer(编舞家)286. director(导演)287. cinematographer(摄影师)288. artist(艺术家)289. style(风格)290. technique(技术)体育: 291. sports(体育)292. baseball(棒球)293. basketball(篮球)294. football(橄榄球)295. soccer(足球)296. hockey(曲棍球)297. tennis(网球)298. golf(高尔夫)299. gymnastics(体操)300. swimming(游泳)。
IBM Cognos Transformer V11.0 用户指南说明书
国内外计算机发展史上的著名人物

引言概述:计算机发展史上涌现了许多著名人物,他们为计算机的发展作出了巨大的贡献。
本文将继续介绍国内外计算机发展史上的另一批著名人物,并详细阐述他们在计算机领域的贡献。
主要包括图灵、巴克斯、佩里和维纳。
正文内容:1.图灵(AlanTuring)1.1提出图灵机概念1.2开展早期计算机理论研究1.3帮助破解密码1.4提出图灵测试概念1.5对的理论贡献2.巴克斯(JohnBackus)2.1开发了Fortran语言2.2提出高级语言的编程思想2.3参与开发COBOL语言2.4提出了函数式编程的概念2.5获得图灵奖的荣誉3.佩里(DavidA.Patterson)3.1提出精简指令集计算机(RISC)的概念3.2发展了RISCV指令集架构3.3推动了计算机体系结构的发展3.4提倡了“更多速度,更少摩擦”的设计理念3.5获得图灵奖的荣誉4.维纳(NorbertWiener)4.1提出了控制论的概念4.2对信号处理和系统控制的研究做出突出贡献4.3开创了现代自适应控制理论4.4在工程和生物学等领域应用控制论4.5对计算机科学和的发展产生了重要影响5.拉特纳(LouisR.Rotlinson)5.1领导开发UNIX操作系统5.2提出了分时系统的概念5.3开创了开源软件运动5.4设计了C语言编译器5.5对计算机历史和程序设计产生了深远影响总结:本文详细介绍了图灵、巴克斯、佩里、维纳和拉特纳这些在国内外计算机发展史上具有重要地位的著名人物。
他们以其杰出的贡献和创新精神,推动了计算机科学的进步。
从图灵的理论研究到巴克斯的编程思想,从佩里的RISC概念到维纳的控制论应用,再到拉特纳的UNIX操作系统开发,这些人物都对计算机的发展产生了深远的影响。
他们的贡献不仅在技术领域,还在计算机科学的思想和理念上产生了重要的影响。
我们应该铭记他们的名字,并将他们视为计算机发展史上的里程碑人物。
斯坦福计算与数学工程硕士就业方向
斯坦福计算与数学工程硕士就业方向下载提示:该文档是本店铺精心编制而成的,希望大家下载后,能够帮助大家解决实际问题。
文档下载后可定制修改,请根据实际需要进行调整和使用,谢谢!本店铺为大家提供各种类型的实用资料,如教育随笔、日记赏析、句子摘抄、古诗大全、经典美文、话题作文、工作总结、词语解析、文案摘录、其他资料等等,想了解不同资料格式和写法,敬请关注!Download tips: This document is carefully compiled by this editor. I hope that after you download it, it can help you solve practical problems. The document can be customized and modified after downloading, please adjust and use it according to actual needs, thank you! In addition, this shop provides you with various types of practical materials, such as educational essays, diary appreciation, sentence excerpts, ancient poems, classic articles, topic composition, work summary, word parsing, copy excerpts, other materials and so on, want to know different data formats and writing methods, please pay attention!斯坦福大学计算与数学工程硕士(CME)专业是一个重点培养计算和数学工程方向人才的专业。
数学领域的重要实验室与研究中心

数学领域的重要实验室与研究中心数学是自然科学中的一支重要学科,对于推动科学与技术的发展具有重要意义。
在数学领域中,许多重要的实验室与研究中心扮演着不可忽视的角色。
本文将为大家介绍几个在数学研究领域中备受关注的重要实验室与研究中心。
1. 普林斯顿高等研究院(IAS)普林斯顿高等研究院是位于美国新泽西州普林斯顿的一所著名学术研究机构,成立于1930年。
该研究院侧重于纯粹科学的研究,其中也包括了数学。
数学领域的许多重要成果都在这里诞生。
IAS的研究人员包括了多位数学界的泰斗级人物,他们以其杰出的贡献为数学的发展奠定了基础。
2. 贝尔研究所(Bell Labs)贝尔研究所是AT&T公司下属的研究与发展机构,坐落在美国新泽西州的默里山(Murray Hill)。
虽然贝尔研究所以其在通信技术和计算机技术领域的突出贡献而闻名于世,但在其研究工作中也有众多与数学相关的成果。
例如,贝尔研究所的研究人员提出了一种被广泛应用于图像压缩的数学算法,为数字图像和视频技术的发展奠定了基础。
3. 清华大学数学科学中心清华大学数学科学中心是中国知名的数学研究机构,于2008年成立。
该中心汇聚了来自世界各地的杰出学者和优秀研究生,致力于推动数学研究的前沿。
数学科学中心以其严谨的学术氛围和卓越的研究水平而受到广泛关注。
在该中心,数学家们进行了许多重要的研究工作,为国际数学界的发展做出了重要贡献。
4. 英国剑桥大学研究数学中心(DPMMS)英国剑桥大学研究数学中心是英国顶尖的数学研究机构之一,具有悠久的历史和卓越的学术传统。
该中心位于剑桥大学的数学楼内,涵盖了数学的各个分支领域,并与许多其他学科展开了广泛合作。
DPMMS的研究人员在数学领域的成果备受赞誉,为数学学科的发展提供了重要推动力。
5. 法国国家科学研究中心数学研究所(CNRS)法国国家科学研究中心数学研究所是法国数学研究的重要机构,成立于1966年。
该研究所的目标是推动数学研究的发展,并促进数学与其他科学领域的交叉应用。
Parker Hannifin 公司的达德尔分支 Daedal Division Harrison

S t e p M o t o r S y s t e m sIndexerCompumotor’s AT6200 (two axes of control) and AT6400(four axes of control) are PC bus-based (ISA) indexers designed for industry-standard step and direction motor drives. These indexers can synchronize 2, 3, or 4axes of motion. Incremental encoder feedback on all four axes provides the ability to detect stalls, verify position,and correct for positioning errors generated by inaccurate mechanical transmissions. Like all Compumotor 6000 Series controllers, the AT6200 and AT6400 use the 6000 Series command language, apowerful command language that is flexible enough to implement complex motion control applications and simple enough to not overwhelm the novice programmer.Features Motion•1–2 axes of step and direction control withencoder feedback (AT6200)•1–4 axes of step and direction control withencoder feedback (AT6400)• 1.6MHz step output frequency I/O•Home limit, positive and negative end-of-travel limits provided for all axes•24 programmable inputs,24 programmable outputs • 4 analog inputs that can be used for joystick or feed-rate override control •Up to 4 interrupt-driven inputs for encoder capture and registration inputs •Encoder channels can be configured as hardware up/down counters Language•Example routines written for Microsoft Visual Basic™and Visual C ++•Velocity and acceleration changes on-the-fly•Scaling of distance, velocity and acceleration parameters•Position-based following •2-axis circular or linear interpolation(4-axis linear interpolation for AT6400)•Variable storage,conditional branching, and math•Direct access to motor and encoder positioninformation, I/O and system status (Fast Status area)•Program debug tools—trace mode, break points,and simulation of I/O •Programmable timer•Programmable PC interrupt conditionsAT6200/AT6400 IndexersThe AT6200 and AT6400come standard with Motion Architect, support software for Microsoft Windows operating environment.In addition to MotionArchitect, DOS-based support disk program editor and terminal emulator program examples in C, Pascal,BASIC, and Assembly are included. These examples illustrate controlling and communicating with the AT6200 and AT6400.These indexers have a separate auxiliary board to simplify motor drives,encoders, programmable I/O and joystick connections and optically isolate I/O. There are three auxiliary board versions available: a 120VAC input, a 240VAC input, or a +5VDC input, open-framed version.•Capability to interruptprogram on error conditions •63000 bytes of RAM for program storage(expandable to 1.5 Mbytes)Software Provided•Motion Architect, Microsoft Windows-based application development software•DOS-based program editor and terminal emulator software•Dynamic Link Library (DLL)provided for use with Microsoft Windows and Microsoft Windows-NT™software development kits Optional Software•CompuCAM, computer-aided motion software,imports geometry fromCAD programs, plotter files,or NC programs and generates 6000 Series code•Motion Toolbox library of LabVIEW virtualinstruments (VIs) for icon-based programming ofCompumotor’s 6000 Series controllers•Dynamic Data Exchange (DDE) server available allowing data exchange between different Windows software applications •Motion Builder provides a visual-developmentenvironment for graphical icon-based programming of the 6000 Series product Physical•Separate adaptor board to simplify connections and optically isolate all inputs and outputs•Auxiliary board available in three versions: 120VAC input, 240VAC input and +5VDC input, open-frame •All connections from PC card to auxiliary boardthrough a single 5-foot high density cableIndexersCommand Language (partial command list)The AT6200 and AT6400 is easily programmed with the 6000Series language. Each command is an ASCII character mnemonicwith numeric parameters for each axis following the command. The commands can be transferred to the indexer in either ASCIIformat or in a 2-byte hexadecimal format. Command transfers are done one character at a time, or as part of a block transfer where up to 256 characters are transferred at once.The following command example sets the acceleration to differentvalues on all four axes: A10, 15, 20, 30ConditionalsCommand DescriptionIF( )If statementREPEAT Repeat statementWAIT( )Wait for a specific conditionWHILE( )While a condition is trueEncoderCommand DescriptionENC Encoder/Motor Step ModeEPM Position Maintenance Mode EnableEPMDB Position Maintenance DeadbandERES Encoder ResolutionESDB Encoder Stall DeadbandESTALL Stall Detect EnableHomingCommand DescriptionHOM Go HomeHOMA Home AccelerationHOMAD Home DecelerationHOMBAC Home Backup EnableHOMDF Home Final DirectionHOMEDG Home Reference EdgeHOMLVL Home Active LevelHOMV Home VelocityHOMVF Home Final VelocityHOMZ Home to Z-channel EnableFollowingCommand DescriptionFOLEN Enable followingFOLMAS Define master axesFOLMD Define master move distanceFOLRN Set maximum following ratio numeratorFOLRD Set maximum following ratio denominatorFSHFD Initiate preset phase shiftFSHFC Initiate continuous shiftInterruptsCommand DescriptionINTHW Hardware InterruptINTSW Software InterruptJoystickCommand DescriptionJOY Joystick Mode EnableJOYA Joystick AccelerationJOYAD Joystick DecelerationJOYCDB Joystick Center DeadbandJOYVH Joystick Velocity HighJOYVL Joystick Velocity LowLimitsCommand DescriptionLH Hard Limit EnableLHAD Hard Limit DecelerationLHLVL Hard Limit Active LevelLS Soft Limit EnableLSAD Soft Limit DecelerationLSNEG Soft Limit NEG RangeLSPOS Soft Limit POS Range MathematicalCommand Description+Addition-Subtraction*Multiplication/Division&Boolean And|Boolean OrSIN SineCOS CosineTAN TangentATAN Arc TangentSQRT Square RootMiscellaneousCommand Description;CommentBINARY Binary ModeDRIVE Drive EnableERRORP Error ProgramL LoopMA Absolute/Incremental Mode EnableMC Preset/Continuous Mode EnablePSET Define Position CounterCNTINT Counter Value to Interrupt PCREAD Read a Value from PCTIMST Reset and Start TimerSTEP Single Step Mode EnableWRITE” “Transmit a String to the PCMotionCommand DescriptionA AccelerationAD DecelerationD DistanceGO Initiate MotionGOL Initiate Linear Interpolated MotionS StopV VelocityPath ContouringCommand DescriptionPARCP Radius Specified CW ArcPARCOP Origin Specified CW ArcPLIN Move in a linePRUN Execute PathRegistrationCommand DescriptionRE Registration EnableREG Registration DistanceScalingCommand DescriptionSCALE Enable ScalingSCLA Accel / Decel Scale FactorSCLD Distance Scale FactorSCLV Velocity Scale FactorSubroutinesCommand DescriptionDEF Define a SubroutineGOSUB Execute a Subroutine with Return GOTO Execute a Subroutine without Return Transfer InformationCommand DescriptionTAS Transfer Axis StatusTANV Transfer Analog Input ValueTCMDER Transfer Command that caused an error TCNT Transfer CounterTIN Transfer Input StatusTLIM Transfer Limit StatusTOUT Transfer Output StatusTPE Transfer Position of EncodersTPM Transfer Position of MotorsS t e p M o t o r S y s t e m sSpecifications – AT6200/6400–AUX1ParameterValuePerformance Position range ±2,147,483,648 steps Velocity range1 to 1,600,000 steps/sec Acceleration range 1 to 24,999,975 steps/sec 2Stepping Accuracy ±0 steps from preset total Velocity Accuracy ±0.02% of maximum rate Velocity Repeatability±0.02% of set rate Motion Algorithm Update Rate 2 msInput PowerAT6n00 PC Card************************120V Auxiliary Board (AC or DC input)90-132VAC, 50/60Hz, 1.5A @ 120VAC, single-phase;or power from an external power source of 5VDC, ±10%240V Auxiliary Board (AC or DC input)90-264VAC, 50/60Hz, 0.75A @ 240VAC, single-phase;or power from an external power source of 5VDC, ±10%DC Auxiliary Board+*********Inputs (see also I/O pinouts & circuit drawing)All inputs are optically isolated.Encoder Differential comparator accepts two phase quadrature incremental encoders with differential (recommended) or single ended outputs (+5VDC TTL compatible*). Maximum frequency = 1.6MHz, post-quadrature. Minimum time between transitions = 625 ns.24 ProgrammableHCMOS* compatible with internal 6.8 K Ω pull-up (connect IN-P to +5–24V to source current or connect IN-P to GND to sink current). Voltage range = 0–24V. 50-pin plug is compatible with OPTO-22™ signal conditioning equipment. Controllable with the 6000 Series programming language.Trigger Inputs AT6200 has two and AT6400 has four high-speed inputs for encoder capture and registration.HCMOS* compatible with internal 6.8 K Ω pull-up to AUX-P (wired to +5V at factory). Voltage range=OV-24V.Analog (joystick)Voltage range 0-2.5VDC, 8-bit A/D converter. Optically isolated.Home, Pos/Neg Limits HCMOS* compatible; internally 6.8 K pull-ups to AUX-P Pulse Cut off(wired to +5V at factory). Voltage Range = OV-24V.Joystick Inputs (Axes and Velocity HCMOS and TTL compatible; internal 6.8 K Ω pull-up to +5V; voltage Select, Release, Trigger and Auxiliary)range is 0-24V.Drive Fault, In Position Optically isolated, HCMOS* compatible; internal 1.0 K Ω pull-up to 5V; voltage range = 0V–5V.Outputs24 ProgrammableOptically isolated, HCMOS* compatible, open collector output. Can be pulled up by connecting OUT-P to +5V on the auxiliary board, or to user-supplied voltage of up to 24V. Max voltage in OFF state (not sinking current) = 24V, max current in ON state (sinking) = 30mA.50-pin plug is compatible with OPTO-22™ signal conditioning.Controllable with the 6000 Series programming language.Step, Direction, ShutdownDifferential line driver output. Signal high > 3.5VDC @ +30 mA, signal low < 1.0VDC @ -30 mA.+output for each differential drive is active high; -output for each driver is active low. Step pulse width is 0.3µs to 20 µs (depending on the state of the PULSE command—default is 0.3 µs.)Board Monitor Alarm (BMA)Detects un-recoverable faults in hardware and software. When BMA detects fault, status light on AT6400 card turns off and status light on auxiliary board turns red. BMA can be reset by cycling power to the PC, or by redownloading the AT6400 operating system.EnvironmentalOperating temperature 32° to 122°F (0° to 50°C)Storage temperature -22° to 185°F (-30° to 85°C)Humidity0% to 95% noncondensing*HCMOS-compatible voltage levels: low ≤ 1.67V, high ≥ 3.3V TTL-compatible voltage levels: low ≤ 0.4V; high ≥ 2.4VIndexersProblemAn Original Equipment Manufacturer (OEM)manufactures X-RayScanning equipment used in the quality control of printed circuit boards and wafer chips.The OEM wants to replace the DC motors, mechanics and analog controls with an automated PC-based system to increase throughput and eliminate operator error. The host computer will interact with the motion control card using a C language program.The operator will have the option to manually override the system using a joystick.This machine operates in an environment where PWM (pulse width modulation)related EMI emission is an issue.I/O Requirements•2-Axis analog joystick •Joystick button •Travel limits•Encoder feedback on both axesDisplay Requirements •X and Y position coordinatesOperator Adjustable Parameters•Dimensions of sample under test•(0,0) position — starting point SolutionThe solution of this application utilizes the existing PC by providing a PC-based motion controller,and the AT6200 to control both axes. The LNmicrostepping drive was chosen because of its linear amplifier technology that produces little EMI. The PC monitor is the operator interface.variable and sends this data to the PC for memorystorage. These new position coordinates can now be stored and recalled in the automated test mode.A C language program controls the machine and 6000 Series commands are imbedded within this program to control the AT6200 motion card.The operation of the machine begins with adisplay to the operator of a main menu. This main menu lets the operator select the following modes:•automated test •joystick positioning •teach new automated test.In automated test mode, the PC displays a menu of preprogrammed test routines. Each of these programs has stored positions for the different test locations. This data is downloaded to the AT6200when a test program is selected. The AT6200 then controls the axes to a home position, then moves to each scan position, waiting for the scan completion before moving to the next position.In joystick position mode,the AT6200 enables the joystick allowing theoperator to move in both X and Y directions using the joystick. The AT6200 waits for a signal from the PC to indicate that the joystick session is over.When teach mode isselected, the PC downloads a 6000 language teachprogram to the AT6200. This program was written by the user. After the axes arehomed, the AT6200 enables the joystick and a “position select” joystick button. The operator then jogs axes to a position and presses the “position select” button.Each time the operatorpresses the “position select”Model AT6200/AT6400 Indexer Application:Circuit Board ScanningObjective•AT-based motion controller card•Replace velocity control system (DC motors) and mechanics with more accurate and automated positioning scheme •Manual Joystick control •Continuous display of X &Y axis position•User-friendly teach mode operationsX-Ray Printed Circuit Board ScanningSolution•AT6200 Motion Controller •AT6200, LS drive and motors and Parker Daedal’s X-Y table •AT6200 analog inputs programmed to receive Joystick signals•AT6200’s Fast Status Area and the AT bus eliminate the need for time consuming data requisition routines •Combination of user C language program and the 6000 Seriesprogramming languageS t e p M o t o r S y s t e m sSystem SummaryAT6200AT6400(1–2 axes)(1–4 axes)Shutdown output 1 per axis 1 per axis Drive Fault input1 per axis 1 per axis Incremental encoder input1 per axis 1 per axis POS & NEG end-of-travel limit inputs 1 each per axis 1 each per axis Home limit input1 per axis 1 per axis 8-bit analog input channels for joystick control and variable input 44General purpose programmable inputs (Opto-22™ compatible)2424General purpose programmable outputs (Opto-22™ compatible)2424Trigger inputs24120VAC and 240VAC Input AUX Boards(—) denotes millimetersDC Input Open Frame AUX Board(—) denotes millimetersProvision for #6 mounting screwsT O PL E F TProvision for #10 mtg. Screws (4 places)IndexersDrive 2 or 415-Pin “D”Pin No.Signal 1Step+2Direction +3Reserved4In Position/Stall 5Drive fault 6Reserved 7+5VDC (out)8Shield 9Step –10Direction –11Shutdown +12Shutdown –13-14Ground 15ReservedLimit 2 or 49-Pin Screw Terminal Pin No.Signal 1Shield 2Ground 3Home 4NEG 5POS 6Ground 7Home 8NEG 9POSEncoder 2 or 49-Pin Screw Terminal Pin No.Signal 1Shield 2Ground3Z –4Z +5B –6B +7A –8A +9+5VDC (out)Auxiliary 9-Pin Screw Terminal Pin No.Signal 1Ground 2Pulse cutoff 3Auxiliary pull-up 4Ground 5Input pull-up 6Output pull-up7+5VDC8Ground9+5VDC Programmable Outputs 50-Pin Header Pin No.Signal 1Output #24 (MSB)……47Output #1 (LSB)49+5VDC (out)Even #s GroundProgrammable Inputs 50-Pin Header Pin No.Signal 1Input #24 (MSB)……47Input #1 (LSB)49+5VDC (out)Even #sGroundJoystick 25-Pin “D”Pin No.Signal1Analog Ch. 12Analog Ch. 23Analog Ch. 34Analog Ch. 48Shield 14Ground 15Axes select 16Velocity select 17Joystick release18Joystick trigger19Joystick auxiliary23+5VDC (out)Ordering InformationPart No.DescriptionAT6200-120/240V AT6200 with 90–264VAC input power AT6200-DC AT6200 with +5VDC input power, open-framed version AT6400-120VAT6400 with 120VAC input power AT6400-240V AT6400 with 240VAC input powerAT6400-DCAT6400 with +5VDC input power, open-framed versionAccessoriesPart No.DescriptionVM5050-pin header to screw terminal breakout board. See page C111.71-012832-1515-foot cable to connect the AT6N00 to the auxiliary board. The standard cable is 5 feet in length.TM8Thumbwheel module. See page C106 for details.JS6000Two-axis joystick. See page C110 for details.Software AccessoriesPart No.DescriptionDDE6000DDE server for 6000 Series. Includes software disk with instructions.See page C105.CompuCAM CompuCAM is available in three versions:DXF, HPGL and G-Code. See page 96.Motion Toolbox Library of LabVIEW VIs for Motion Control. See page 98.Motion BuilderGraphical icon-based software.See page C100.AT6200/AT6400 ConnectionsTriggers9-Pin Screw Terminal Pin No.Signal 1Shield 2Ground 3Input 44Ground 5Input 36Ground 7Input 28Ground 9Input 1AT6400only。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
2i
i
i
(5) (6)
Yi+1 = Yi + Yi · e
where the two operations can take place concurrently; the first to prepare for the subsequent iteration and the second to complete the current iteration. If it is desired to compute ai or bi , those computations can be done concurrently with the operations shown in Equation 5 as ai+1 = ai + ai · e2 bi+1 = bi + bi · e
Then b1 = b0 Y0 = 1 − e. By the choice of Y0 , |e| < 1, and taking Y1 = 1 + e as the next multiplier of the dividend and divisor would drive the new divisor to 1 − e2 . From Equation 2, one can also write Y1 = 2 − b1 . Continuing in this manner yields a0 Y0 ...Yi−1 ai ai Yi ai+1 a0 = = = = b0 b0 Y0 ...Yi−1 bi b i Yi bi+1 i = 1, 2, ... (4)
The attractiveness of this technique for hardware embodiment is that Yi = 2 − bi can be derived from bi merely by bit complementation. The quantities bi and Yi are essentially available concurrently. As soon as ai and bi become available, ai , bi and Yi are recycled to the multiplier’s inputs. This process continues until bi becomes (sufficiently close to) 1, or, in practice, for some fixed number of iterations determined by the quality of Y0 . Corresponding to the 147
Abstract Goldschmidt’s Algorithms for division and square root are often characterized as being useful for hardware implementation, and lacking self-correction. A reexamination of these algorithms show that there are good software counterparts that retain the speed advantage of Goldschmidt’s Algorithm over the Newton-Raphson iteration. A final step is needed, however, to get the last bit rounded correctly. Key words: division, square root, Goldschmidt, floating-point
The objective in Goldschmidt’s algorithm is to find quantities Yi by which to multiply the dividend and divisor of Equation 1 to drive the divisor towards unity and as a consequence the dividend toward the quotient. The relative error of the initial guess is given by e= 1/b0 − Y0 1/b0 = 1 − b 0 Y0 (2) (3)
final bi , ai is taken to be the quotient. Here, the arithmetic has been assumed to be exact; in practice each multiplication is rounded at some precision, and the subtraction 2 − bi itself may also be subjected to rounding. With a pipelined multiplier, the computations of the ai are interleaved with the bi , and the entire iteration can take place in one multiplier cycle. If the reciprocal of b0 is required, then it can be approximated by the product yi = Yi . In a software implementation of this description of Goldschmidt’s algorithm, the subtraction 2 − bi cannot be hidden, so that each iteration requires two floating point cycles. But there are simple relationships between the relative i−1 error e, bi , and Yi . By induction, we will show that bi = 1 − e2 , and Yi = i−1 1 + e2 . Equation 3 shows that b1 = 1 − e, and Y1 = 1 + e (or 2 − b1 ), satisfying the inductive hypothesis for i = 1. Using the inductive hypothesis, i−1 i−1 i i bi+1 = bi Yi = 1 − e2 1 + e2 = 1 − e2 , and Yi+1 = 2 − bi+1 = 1 + e2 . Thus, Goldschmidt’s algorithm can be rewritten as follows: e2
i
(7)
2i
For software implementation, this formulation of Goldschmidt’s algorithm has the advantage that the quantity 2 − bi does not appear. The quantities in Equation 7 can each be computed by one fused multiply-add instruction and can execute concurrently with the multiplication needed to evaluate Equation 5 for the next iteration. The software version thus also has a latency of one floating point operation, on a computer with a fused multiply-add instruction and a pipelined floating point unit. In software it is not necessary to compute the bi , nor the Yi (other than Y0 ) if they are not needed. Finally, 2 − bi suffers from precision loss as the Goldschmidt algorithm progresses, whereas i the quantities e2 are computed to almost full precision. From Equations 6 Goldschmidt’s algorithm is seen to be equivalent to 1 = Y0 (1 + e)(1 + e2 )(1 + e4 )... b0 148
Software Division and Square Root Using Goldschmidt’s Algorithms
Peter Markstein
Hewlett-Packard Laboratories, 1501 Page Mill Road, Palo Alto, CA 94304, U.S.A.
1
Introduction
Multiplicative division and square root implementations frequently employ iterative methods such as the Newton-Raphson iterations[1] and Goldschmidt’s algorithms[2]. The latter are often characterized as being non-self-correcting and suitable for hardware, while the former are self-correcting and more suitable for software implementation. The usual description of Goldschmidt’s algorithms reflect a hardware orientation, but the performance advantages are difficult to realize in software. In this paper, these algorithms are reformulated to make them more “software friendly” while maintaining their latencyreducing properties. Several authors have used the “software friendly” forms without ever mentioning the relationship to Goldschmidt’s algorithms.