Matla-Simulink_仿真实验
matlab中Simulink 的仿真实验报告
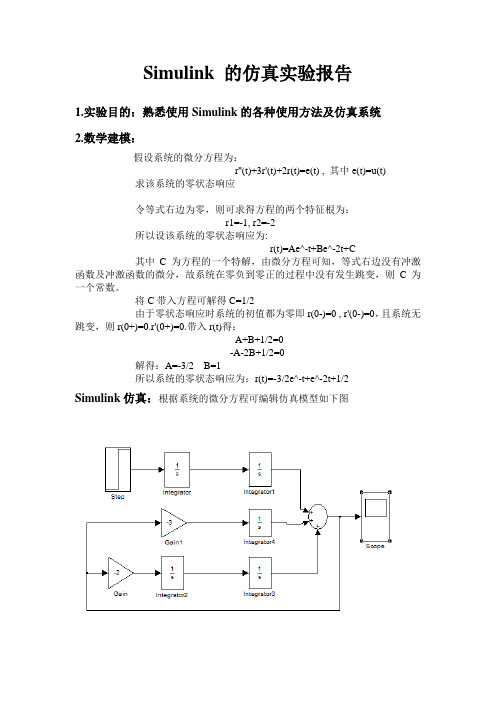
Simulink 的仿真实验报告1.实验目的:熟悉使用Simulink的各种使用方法及仿真系统2.数学建模:假设系统的微分方程为:r''(t)+3r'(t)+2r(t)=e(t) , 其中e(t)=u(t)求该系统的零状态响应令等式右边为零,则可求得方程的两个特征根为:r1=-1, r2=-2所以设该系统的零状态响应为:r(t)=Ae^-t+Be^-2t+C其中C为方程的一个特解,由微分方程可知,等式右边没有冲激函数及冲激函数的微分,故系统在零负到零正的过程中没有发生跳变,则C为一个常数。
将C带入方程可解得C=1/2由于零状态响应时系统的初值都为零即r(0-)=0 , r'(0-)=0,且系统无跳变,则r(0+)=0.r'(0+)=0.带入r(t)得:A+B+1/2=0-A-2B+1/2=0解得:A=-3/2 B=1所以系统的零状态响应为:r(t)=-3/2e^-t+e^-2t+1/2Simulink仿真:根据系统的微分方程可编辑仿真模型如下图打开开始按键,可以得到波形图:验证仿真结果:由前面得到的系统零状态响应结果:r(t)=-3/2e^-t+e^-2t+1/2可编辑仿真模型:>> t=(0:0.1:10);>> plot(t,((-3)/2)*exp((-1)*t)+exp((-2)*t)+1/2)实验结论:Simulink仿真结果和函数仿真结果基本一致,所以simulink仿真是正确的。
实验心得:1.此实验是利用matlab对一个微分方程进行建模求解,既要求我们掌握对微分方程的求解,又要求掌握用matlab对微分方程进行建模,所以要求我们对软件得熟悉。
2.信号与系统的实验主要是用matlab分析或验证书上的东西,前提当然是学好书本上的知识,再学好matlab这个软件。
3.用simulink仿真的时候,对函数用积分器较好,不知为什么用微分器做不出来,报错显示不出图形。
matlab的simulink仿真建模举例 -回复
matlab的simulink仿真建模举例-回复Matlab的Simulink仿真建模举例Simulink是Matlab附带的一款强大的仿真建模工具,它能够帮助工程师们通过可视化的方式建立和调试动态系统模型。
Simulink通过简化传统的数学模型建立过程,使得工程师们能够更加直观地理解和分析复杂的系统。
在本文中,我们将介绍一个关于电机控制系统的Simulink仿真建模的例子。
一、了解电机控制系统在开始建模之前,我们首先需要了解电机控制系统的基本原理。
电机控制系统通常包括输入、电机和输出三个主要部分。
输入通常是来自于传感器或用户的命令信号,例如转速、位置或力矩。
电机是通过接受输入信号并根据特定的控制算法生成输出信号。
输出信号通常是电机的转速、位置或功率等。
控制算法通常采用比例-积分-微分(PID)控制或者其他控制算法。
二、建立Simulink模型1. 创建新的Simulink模型在Matlab主界面中,选择Simulink选项卡下的“New Model”创建一个新的Simulink模型。
2. 添加输入信号在Simulink模型中,我们首先需要添加输入信号模块。
在Simulink库浏览器中选择“Sources”类别,在右侧面板中找到“Step”模块,并将其拖放到模型中。
3. 添加电机模型接下来,我们需要将电机模型添加到Simulink模型中。
Simulink库浏览器中选择“Simscape”类别,在右侧面板中找到“Simscape Electrical”子类别,然后找到“Simscape模型”模块,并将其拖放到模型中。
4. 连接输入信号和电机模型将输入信号模块的输出端口与电机模型的输入端口相连,以建立输入信号与电机模型之间的连接。
5. 添加输出信号模块在Simulink模型中,我们还需要添加输出信号模块。
在Simulink库浏览器中选择“Sinks”类别,在右侧面板中找到“Scope”模块,并将其拖放到模型中。
MATLAB Simulink系统建模与仿真 实验报告
MATLAB/Simulink 电力系统建模与仿真实验报告姓名:******专业:电气工程及其自动化班级:*******************学号:*******************实验一无穷大功率电源供电系统三相短路仿真1.1 无穷大功率电源供电系统仿真模型构建运行MATLAB软件,点击Simulink模型构建,根据电路原理图,添加下列模块:(1)无穷大功率电源模块(Three-phase source)(2)三相并联RLC负荷模块(Three-Phase Parallel RLC Load)(3)三相串联RLC支路模块(Three-Phase Series RLC Branch)(4)三相双绕组变压器模块(Three-Phase Transformer (Two Windings))(5)三相电压电流测量模块(Three-Phase V-I Measurement)(6)三相故障设置模块(Three-Phase Fault)(7)示波器模块(Scope)(8)电力系统图形用户界面(Powergui)按电路原理图连接线路得到仿真图如下:1.2 无穷大功率电源供电系统仿真参数设置1.2.1 电源模块设置三相电压110kV,相角0°,频率50Hz,接线方式为中性点接地的Y形接法,电源电阻0.00529Ω,电源电感0.000140H,参数设置如下图:1.2.2 变压器模块变压器模块参数采用标幺值设置,功率20MVA,频率50Hz,一次测采用Y型连接,一次测电压110kV,二次侧采用Y型连接,二次侧电压11kV,经过标幺值折算后的绕组电阻为0.0033,绕组漏感为0.052,励磁电阻为909.09,励磁电感为106.3,参数设置如下图:1.2.3 输电线路模块根据给定参数计算输电线路参数为:电阻8.5Ω,电感0.064L,参数设置如下图:1.2.4 三相电压电流测量模块此模块将在变压器低压侧测量得到的电压、电流信号转变成Simulink信号,相当于电压、电流互感器的作用,勾选“使用标签(Use a label)”以便于示波器观察波形,设置电压标签“Vabc”,电流标签“Iabc”,参数设置如下图:1.2.5 故障设置模块勾选故障相A、B、C,设置短路电阻0.00001Ω,设置0.02s—0.2s发生短路故障,参数设置如下图:1.2.6 示波器模块为了得到仿真结果准确数值,可将示波器模块的“Data History”栏设置为下图所示:1.3 无穷大功率电源供电系统仿真结果及分析得到以上的电力系统参数后,可以首先计算出在变压器低压母线发生三相短路故障时短路电流周期分量幅值和冲击电流的大小,短路电流周期分量的幅值为Im=10.63kA,时间常数Ta=0.0211s,则短路冲击电流为Iim=17.3kA。
实验一典型环节的MATLAB仿真
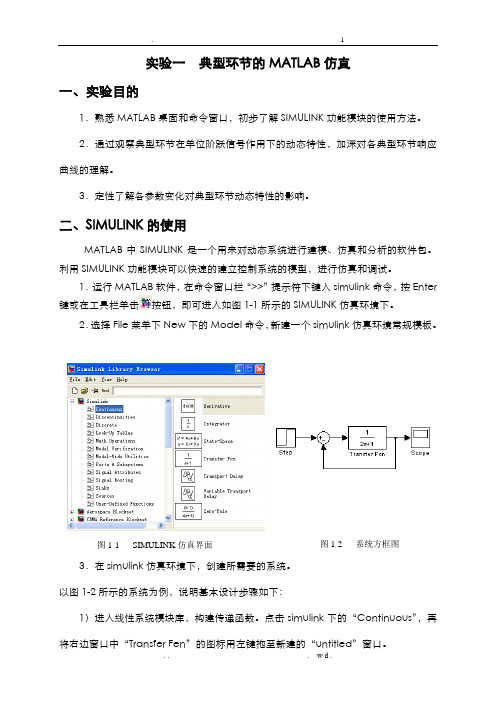
实验一典型环节的MATLAB仿真一、实验目的1.熟悉MATLAB桌面和命令窗口,初步了解SIMULINK功能模块的使用方法。
2.通过观察典型环节在单位阶跃信号作用下的动态特性,加深对各典型环节响应曲线的理解。
3.定性了解各参数变化对典型环节动态特性的影响。
二、SIMULINK的使用MATLAB中SIMULINK是一个用来对动态系统进行建模、仿真和分析的软件包。
利用SIMULINK功能模块可以快速的建立控制系统的模型,进行仿真和调试。
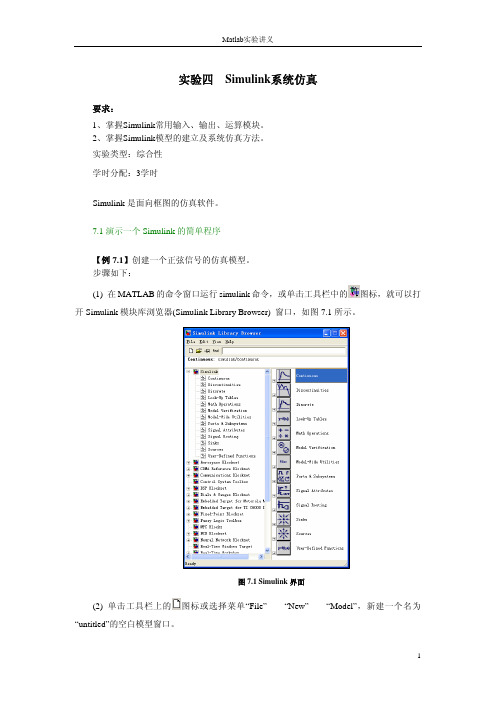
1.运行MATLAB软件,在命令窗口栏“>>”提示符下键入simulink命令,按Enter 键或在工具栏单击按钮,即可进入如图1-1所示的SIMULINK仿真环境下。
2.选择File菜单下New下的Model命令,新建一个simulink仿真环境常规模板。
3.在simulink仿真环境下,创建所需要的系统。
以图1-2所示的系统为例,说明基本设计步骤如下:1)进入线性系统模块库,构建传递函数。
点击simulink下的“Continuous”,再将右边窗口中“Transfer Fen”的图标用左键拖至新建的“untitled”窗口。
图1-1 SIMULINK仿真界面图1-2 系统方框图2)改变模块参数。
在simulink 仿真环境“untitled ”窗口中双击该图标,即可改变传递函数。
其中方括号的数字分别为传递函数的分子、分母各次幂由高到低的系数,数字之间用空格隔开;设置完成后,选择OK ,即完成该模块的设置。
3)建立其它传递函数模块。
按照上述方法,在不同的simulink 的模块库中,建立系统所需的传递函数模块。
例:比例环节用“Math ”右边窗口“Gain ”的图标。
4)选取阶跃信号输入函数。
用鼠标点击simulink 下的“Source ”,将右边窗口中“Step ”图标用左键拖至新建的“untitled ”窗口,形成一个阶跃函数输入模块。
5)选择输出方式。
matlab实验4simulink系统仿真
1. 模块间连线 先将光标指向一个模块的输出端,待光标变为十字符后,按下鼠标键并拖动,直到另 一模块的输入端。
6
Matlab实验讲义
2. 信号线的分支和折曲 (1) 分支的产生 将光标指向信号线的分支点上,按鼠标右键,光标变为十字符,拖动鼠标直到分支线 的终点,释放鼠标;或者按住 Ctrl 键,同时按下鼠标左键拖动鼠标到分支线的终点,如图 7.10 所示。
7.2.2 Simulink 的模型窗口
模型窗口由菜单、工具栏、模型浏览器窗口、模型框图窗口以及状态栏组成。
菜单 工具栏
模型浏览器
模型框图
状态栏
图7.5 双窗口模型窗口
1. 状态栏
3
Matlab实验讲义
2. 工具栏 模型窗口工具栏如图 7.6 所示。
创建并编译生成exe文件
展示父系统 打开调试器
开始仿真 结束仿真
(4) 用鼠标单击所需要的输入信号源模块“Sine Wave”(正弦信号),将其拖放到的空白 模型窗口“untitled”,则“Sine Wave”模块就被添加到 untitled 窗口;也可以用鼠标选中“Sine Wave”模块,单击鼠标右键,在快捷菜单中选择“add to 'untitled'”命令,就可以将“Sine Wave”模块添加到 untitled 窗口,如图 7.2 所示。
显示库链接 显示/隐藏阴影效果 设置不同的采样时间序列的颜色 粗线表示多信号构成的向量信号线 注明向量信号线的信号数 标明端口数据的类型 显示存储类型 数据浏览器 Simulink调试器 用户定义数据类型设计器 线性化分析工具
7.3 模型的创建
7.3.1 模块的操作
1. 对象的选定 (8) 选定单个对象 选定对象只要在对象上单击鼠标,被选定的对象的四角处会出现小黑块编辑框。 (9) 选定多个对象 如果选定多个对象,可以按下 Shift 键,然后再单击所需选定的模块;或者用鼠标拉出 矩形虚线框,将所有待选模块框在其中,则矩形框中所有的对象均被选中,如图 7.7 所示。
matlab-SIMULINK仿真实例

二并联杆数控螺旋面钻头尖刃磨机的机构仿真一、仿真原理图1二并联杆数控螺旋面钻头尖刃磨机床示意图图2 二并联杆数控螺旋面钻头尖刃磨机床刃磨原理图重要假设条件:1、二并联杆数控螺旋面钻头尖刃磨机床是通过两组并联杆(2,a和3,b)保证动平台4只在空间中做水平运动,而没有翻转运动。
每一组并联杆是由空间相互平行的4根杆件组成,由于组内各杆件受力相同,所以将其简化成平面机构如图2。
构件a,b是保证动平台4只做水平运动的辅助平行杆,所以可以假设将机构中杆件a,b省略,而动平台4只做水平移动,没有翻转运动,也就是4相对于地面的夹角θ4恒等于0。
2、直线电机的次子有两个(1和5)但是在加工过程中并不是两者同时运动,所以假设5与导轨固联。
3、假设机床在工作过程中动平台4只受到树直向上的恒力作用,且作用在其中心位置。
基于以上假设机床平面结构示意图如图3。
图3二并联杆数控螺旋面钻头尖刃磨机床简化机构平面结构示意图二、建立仿真方程C2=cos(θ2) S2=sin(θ2) C3=cos(θ3) S3=sin(θ3)一)力方程(分别对各个杆件进行受力分析)对动平台4:受力分析如图4F24x+F43x=m4*Ac4x (1)F24y+F43y=m4*Ac4y (2)F24y*rc4-F43y*rc4=0 (3)图4动平台4的受力分析对并联杆2:受力分析如图5F12x+F24x=-m2*Ac2x (4)F12y+F24y=-m2*Ac2y (5)F12x*rc2*S2+F12y*rc2*C2-F24x*rc2*S2-F24y*rc2*C2=I2*α2 (6)图5并联杆2的受力分析对直线电机滑块1:受力分析如图6Fm+F12x=m1*r1_dot_dot (7)Fy=F12y (8)图6直线电机滑块1的受力分析对并联杆3:受力分析如图7图7并联杆3的受力分析二)闭环矢量运动方程(矢量图如图8)图8 闭环矢量图矢量方程为:R1+R2=R3+R4将上述矢量方程分解为x和y方向,并分别对方程两边对时间t求两次导数得:r1_dot_dot+r2*α2*S2+r2*w2^2*C2=r3*α3*S3+r3*w3^2*C3 (12)r2*α2*C2-r2*w2^2*S2=r3*α3*C3-r3*w3^2*S3 (13)三)质心加速度的矢量方程F13x+F43x=-m3*Ac3x (9)F13y+F43y=-m3*Ac3y (10)F43x*r3*C3+F43y*r3*S3= I3*α3 (11)图9质心加速度的矢量示意图矢量关系:Ac3=Rc3_dot_dotAc4=R3_dot_dot+ Rc4_dot_dotAc2=R3_dot_dot+ R4_dot_dot+ Rc2_dot_dot (_dot_dot 表示对时间求两次导数)将上述三个矢量方程分别分解为x 和y 方向,则它们等效为以下六个方程;Ac3x=-rc3*w3^2*C3-rc3*α3*S3 (14) Ac3y=-rc3*w3^2*S3+rc3*α3*C3 (15) Ac4x=-r3*w3^2*C3-r3*α3*S3 (16) Ac4y=-r3*w3^2*S3+r3*α3*C3 (17) Ac2x=-r3*w3^2*C3-r3*α3*S3-rc2*w2^2*C2-rc2*α2*S2 (18) Ac2y=-r3*w3^2*S3+r3*α3*C3-rc2*w2^2*S2+rc2*α2*C2 (19) 力未知量为:F12x,F12y,F24x,F24y,F43x,F43y,F13x,F13y,Fy,Fm 引入的加速度有:α2,α3,r1_dot_dot ,Ac3x ,Ac3y ,Ac4x ,Ac4y ,Ac2x ,Ac2y三、系统方程的组装将所有19个方程组装成矩阵形式1010000000000200000010100000000002002222222200000020000000000101000000000000400001010000000000004000101000000000000010000000010010000000100000010000000000000010100000000m m rc S rc C rc S rc C I m m m ⋅⋅-⋅-⋅-----300000000101000000003000000333300003000000000000000002233100000000000000002233000000000000000002233010000000000000002233001000000000000000330001000000000000m m r C r S I r S r S r C r C rc S r S rc C r C rc S ⋅⋅-⋅-⋅⋅-⋅⋅⋅⋅⋅-⋅003300001000000000000033000001000000000000330001rc C r S r C ⎛⎫⎪ ⎪⎪⎪⎪ ⎪⎪⎪ ⎪⎪⎪ ⎪ ⎪ ⎪⎪⎪ ⎪⎪⎪ ⎪⎪⎪ ⎪⎪⎪⋅-⎪⋅ ⎪⎪ ⎪⋅-⎝⎭120120240240434301301300020333^2322^2222^2233^2322^222233441F x F y F x F y F x p F y F x F y Fy Fm r w C r w C r w S r w S rc w C Ac x Ac y Ac x Ac y Ac x Ac y r αα••⎛⎫ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪- ⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪⨯= ⎪ ⎪ ⎪⋅⋅-⋅⋅ ⎪ ⎪⋅⋅-⋅⋅ ⎪-⋅⋅ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪⎝⎭33^2322^2233^2333^2333^2333^2333^23r w S rc w S r w S rc w C rc w S r w C r w S ⎛⎫ ⎪⎪⎪ ⎪⎪⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪⎪ ⎪⎪⎪ ⎪ ⎪ ⎪-⋅⋅ ⎪⋅⋅+⋅⋅ ⎪ ⎪-⋅⋅ ⎪ ⎪⋅⋅ ⎪-⋅⋅ ⎪⎪ ⎪⋅⋅⎝⎭ 四、初始条件的设定假设图3位置就是初始位置。
Matlab SIMULINK仿真实验报告

c=20;
mp=270;
mt=50;
I=mp*l^2;%计算吊重转动惯量
lmp=l*mp;
k1=1/(mt+mp);
k2=mp*l/(I+mp*l^2);
设置仿真时间为200s,启动Simulink仿真,则由小车位移示波器和吊重摆角示波器,可观察到系统在初始状态x(0)=0, ,(0)=0.01rad/s,作用下x、的变化过程曲线:
图5-2摄氏温度到华氏温度的转化的参考模型
3.利用Simulink仿真下列曲线,取 。
。
仿真参考模型如下图5-3,Sine Wave5模块参数设置如下图5-4,请仿真其结果。
图5-3 的仿真参考模型图图5-4 Sine Wave5模块参数设置图
4.如图5-5所示是分频器仿真框图,其组成仅有三台设备:脉冲发生器,分频器和示波器。分频器送出一个到达脉冲,第一路cnt(计数),它的数值表示在本分频周期记录到多少个脉冲;第二路是hit(到达),就是分频后的脉冲输出,仿真出结果来。
悬吊式起重机小车位移
悬吊式起重机吊重摆角
二、实验设备及条件
计算机一台(带有MATLAB6.5以上的软件环境)。
三、实验内容
1.建立下图5-1所示的Simulink仿真模型并进行仿真,改变Gain模块的增益,观察Scope显示波形的变化。
图5-1正弦波产生及观测模型
2.利用simulink仿真来实现摄氏温度到华氏温度的转化: ( 范围在-10℃~100℃),参考模型为图5-2。
西安邮电学院
《Matlab》
实验报告
(四)
2011-2012学年第1学期
专业:
自动化
班级:
自动0903
MATLAB_SIMULINK C 语言模块仿真测试方法

MATLAB/SIMULINK C语言模块仿真测试方法iFTrue本文档描述了如何采用C语言编程的方式在MATLAB中进行仿真的方法,这里的C源文件可以按照模块化编程的方式进行编写,进而可以无需做任何更改便可以移植到CCS等编程环境中。
以下采用的MATLAB版本为Matlab 7.0,其余版本大同小异。
1 C语言编译器首先,需要在MALAB环境中设置C语言编译器,以便进行代码编译。
在MATLAN命令窗口中,使用mex -setup指令选择所需的编译器,按照提示进行操作:图1-1 MATLAB环境C编译器设置如果电脑中安装了其他C语言编译环境,如Microsoft Visual C++6.0等,在图1-1“Select a compiler”步骤中会相应地列出,可根据自己地喜好选择,差异不大。
2 创建SIMULINK工程2.1 工程目录为了方便代码管理,建议采用如下目录结构:1>> 新建文件夹,命名为仿真工程名,例如:SVPWM2>> 在该文件夹下依次新建4个文件夹:Include、Source、Model和Document3>> Include:存放头文件xxx.hSource:存放源文件xxx.cModel:存放SIMULINK模型文件xxx.mdlDocument:存放相关说明文档与版本控制文档等2.2 SIMULINK模型在SIMULINK中根据实际需要搭建仿真模型,并存放于Model文件夹中,其中控制算法部分使用Sfunction builder,这里以空间矢量脉宽调制(SVPWM)举例说明,模型如图2-1所示。
图2-1 SIMULINK仿真模型双击Sfunction builder模块设置(即图2-1中的SVPWM),首先填写S-function name,然后在Initialization选项卡中选择Sample mode为Discere,意味着使用离散采样模式,在Sample time value中设置采样周期,这里采用1e-4(单位:秒)。
matlab simulink仿真实验报告
matlab simulink仿真实验报告[Abstract]本篇报告介绍了一项利用Matlab和Simulink进行仿真实验的过程和结果。
实验主要涉及对加速度计数据的滤波和降噪处理,以及利用观测器估计一个非线性系统的状态变量。
本文介绍了实验设计的思路和步骤,详细讲解了实验中所使用到的算法和模型,并对实验结果进行了分析和总结。
[Keywords][Introduction]在自动化控制、机器人技术、航天航空、汽车电子等领域中,传感器和估计器是广泛应用的两类算法。
传感器可以测量物理量,如位置、速度、加速度等,并将其转化为电信号输出。
估计器则通过对物理模型的建模和输出信号的处理,来推测和估计系统的状态变量。
加速度计可以测量物体在三个轴向上的加速度,同时可以进行数据滤波和降噪。
估计器可以用于非线性系统的状态估计,具有广泛的应用前景。
[Simulation Process]1. 数据采集处理加速度计可以用于测量物体在三个轴向上的加速度。
由于传感器的噪声和误差,采集的数据往往不够准确和稳定,需要通过滤波和降噪等算法进行处理。
本实验中采用了常用的Butterworth低通滤波器和移动平均滤波器来对加速度计数据进行处理。
Butterworth低通滤波器是一种线性相位滤波器,可以将高频信号滤去,降低信号噪声。
在Matlab中,可以通过函数[b,a] = butter(n,Wn,'low')生成Butterworth低通滤波器。
其中,n为滤波器的阶数,Wn为截止频率。
移动平均滤波器是一种简单有效的滤波方法,可以对信号进行平均处理,消除信号的高频成分和噪声。
在Matlab中,可以通过函数smooth(x,n)生成移动平均滤波器。
其中,x为待处理的信号,n为滤波器窗口大小。
2. 状态估计模型状态估计模型是一种建立在数学模型基础上的估计方法,常常用于非线性系统的状态估计。
本实验中,给定了以下非线性系统的模型:$$\begin{cases}x_{1}' = x_{2} \cos(x_{1}) \\x_{2}'= u\end{cases}$$其中,x1和x2为系统状态变量,u为系统的控制输入。
MATLABSimulink和控制系统仿真实验报告
MATLAB/Simulink与控制系统仿真实验报告姓名:喻彬彬学号:K031541725实验1、MATLAB/Simulink 仿真基础及控制系统模型的建立一、实验目的1、掌握MATLAB/Simulink 仿真的基本知识;2、熟练应用MATLAB 软件建立控制系统模型。
二、实验设备电脑一台;MATLAB 仿真软件一个三、实验内容1、熟悉MATLAB/Smulink 仿真软件。
2、一个单位负反馈二阶系统,其开环传递函数为210()3G s s s =+。
用Simulink 建立该控制系统模型,用示波器观察模型的阶跃响应曲线,并将阶跃响应曲线导入到MATLAB 的工作空间中,在命令窗口绘制该模型的阶跃响应曲线。
3、某控制系统的传递函数为()()()1()Y s G s X s G s =+,其中250()23s G s s s+=+。
用Simulink 建立该控制系统模型,用示波器观察模型的阶跃响应曲线,并将阶跃响应曲线导入到MATLAB 的工作空间中,在命令窗口绘制该模型的阶跃响应曲线。
4、一闭环系统结构如图所示,其中系统前向通道的传递函数为320.520()0.11220s G s s s s s+=+++,而且前向通道有一个[-0.2,0.5]的限幅环节,图中用N 表示,反馈通道的增益为1.5,系统为负反馈,阶跃输入经1.5倍的增益作用到系统。
用Simulink 建立该控制系统模型,用示波器观察模型的阶跃响应曲线,并将阶跃响应曲线导入到MATLAB 的工作空间中,在命令窗口绘制该模型的阶跃响应曲线。
四、实验报告要求实验报告撰写应包括实验名称、实验内容、实验要求、实验步骤、实验结果及分析和实验体会。
五、实验思考题总结仿真模型构建及调试过程中的心得体会。
题1、(1)利用Simulink的Library窗口中的【File】→【New】,打开一个新的模型窗口。
(2)分别从信号源库(Sourse)、输出方式库(Sink)、数学运算库(Math)、连续系统库(Continuous)中,用鼠标把阶跃信号发生器(Step)、示波器(Scope)、传递函数(Transfern Fcn)和相加器(Sum)4个标准功能模块选中,并将其拖至模型窗口。
如何在Simulink中进行Animation仿真试验 9

参考资料:Matlab/Simulink动力学系统建模与仿真
《Matlab/Simulink动力学系统建模与仿真》是2019年12月机械工业出版社出版的图书,作者是 王砚、黎明安。
谢谢观看
方法/步骤
2、进入simulink模型中
方法/步骤
3、左击两下鼠标,开启搜索窗口
方法/步骤
4、输入VR,选择VR Sink
方法/步骤
5、左击2次,开启属性窗口
方法/步骤
6、点击Browse
方法/步骤
7、选择octavia_scene。
方法/步骤
8、勾选rotation和translation
方法/步骤
9、勾选Open Viewer automatically
方法/步骤
10、设置好的VR sink block
方法/步骤
11、连接好的模拟仿真图。方法/步骤源自12、左击2次鼠标,开启视窗
方法/步骤
13、点击RUN
方法/步骤
14、运行结果。
参考资料:MATLAB
MATLAB是美国MathWorks公司出品的商业数学软件,用于数据分析、无线通信、深度学习、图像 处理与计算机视觉、信号处理、量化金融与风险管理、机器人,控制系统等领域。 MATLAB是matrix&laboratory两个词的组合,意为矩阵工厂(矩阵实验室),软件主要面对科学 计算、可视化以及交互式程序设计的高科技计算环境。它将数值分析、矩阵计算、科学数据可视 化以及非线性动态系统的建模和仿真等诸多强大功能集成在一个易于使用的视窗环境中,为科学 研究、工程设计以及必须进行有效数值计算的众多科学领域提供了一种全面的解决方案,并在很 大程度上摆脱了传统非交互式程序设计语言(如C、Fortran)的编辑模式。 MATLAB和Mathematica、Maple并称为三大数学软件。它在数学类科技应用软件中在数值计算方 面首屈一指。行矩阵运算、绘制函数和数据、实现算法、创建用户界面、连接其他编程语言的程 序等。
simulink建模及动态仿真的一些实验步骤

simulink建模及动态仿真的一些实验步骤Simulink是MATLAB中的一种可视化仿真工具,可以用于动态系统建模、仿真和分析。
以下是一些Simulink建模及动态仿真的实验步骤:启动Simulink:首先,需要打开MATLAB,然后在MATLAB 的命令窗口中输入“simulink”命令,或者点击工具栏中的Simulink 图标来启动Simulink。
新建模型:在Simulink的启动界面中,可以选择“Blank Model”来新建一个空白的模型。
也可以选择其他预设的模型模板来开始建模。
构建系统模型:在新建的模型窗口中,可以通过从Simulink 的模块库中拖拽模块到模型窗口中来构建系统模型。
模块库中包含了各种类型的模块,如源模块、接收模块、处理模块等。
将这些模块按照系统的结构和功能连接起来,形成一个完整的系统模型。
设置模块参数:对于模型中的每个模块,都可以双击打开其参数设置对话框,设置其参数和初始条件。
这些参数和初始条件将决定模块在仿真中的行为。
设置仿真参数:在模型窗口的工具栏中,可以点击“Simulation”->“Model Configuration Parameters”来打开仿真参数设置对话框。
在这个对话框中,可以设置仿真的起始和结束时间、仿真步长、求解器类型等参数。
开始仿真:完成以上步骤后,可以点击模型窗口工具栏中的“Run”按钮来开始仿真。
在仿真过程中,可以实时观察模型中各个模块的状态和输出。
分析结果:仿真结束后,可以使用Simulink提供的各种分析工具来分析仿真结果。
例如,可以使用示波器模块来显示仿真过程中某个模块的输出波形,也可以使用MATLAB的工作空间来查看和处理仿真数据。
以上步骤是一个基本的Simulink建模和动态仿真的过程。
在实际使用中,可能还需要根据具体的需求和系统特点进行一些额外的设置和调整。
MATLAB基本使用及SIMULINK建模仿真实验
MATLAB基本使⽤及SIMULINK建模仿真实验
MATLAB基本使⽤及SIMULINK建模仿真实验
这是我总结的操作⽅法:
1 ) M脚本⽂件的编写
1、新建M-file;
2、输⼊指令;
3、保存(注意:保存路径需要与⼯作路径⼀致)
2 )在SIMULINK中创建系统模型的步骤
1、新建⼀个空⽩的模型窗⼝。
2、在SIMULINK模块库浏览器中,将创建系统模型所需要的功能模块⽤⿏标拖放到新建的模型窗⼝中。
3、在各个模块⽤信号线连接,设置仿真参数,保存锁创建的模型(后缀名.mdl)。
4、点击模型窗⼝中的三⾓形按钮,运⾏仿真。
1、⼆维曲线绘图基本指令操作
t=(0:pi/50:2*pi)’;
k=0:4:0.1:1;
Y=cos(t)*k;
Plot(t,Y);
图 1 ⼆维曲线绘图plot指令操作
2、⽤图形表⽰连续调制波形Y=sin(t)sin(9t)及其包络线。
t=(0:pi/100:pi)’;
y1=sin(t).*sin(9*t);
t3=pi*(0:9)/9;
y3=sin(t3).*sin(9*t3);
plot(t,y1,’r:’,t,y2,’b’,t3,y3,’bo’);
axis([0,pi,-1,1]);
图 2 调制波形及其包络线指令操作
3、⽤信号发⽣器产⽣1HZ,幅度为15mv的正弦波和⽅波信号,并通过⽰波器观察波形。
注意设置仿真参数和⽰波器的扫描参数和幅度显⽰参数。
使得⽰波器能够显⽰10个正弦波周期。
图 3 SIMULINK仿真模型图
图 4 10个周期正弦波
图 5 10个周期⽅波。
基于MATLABSimulink的电力系统仿真实验

基于MATLAB/Simulink 的电力系统故障分析10kv系统三相短路分析三相短路(以中性点不接地系统模型为类)模块搭建:三相短路各元件参数设置如下:MuiliTffer' Frcml:Linc1_\/otc|Fr« mF~roi-LZ■ ___ Lin总3IK31L:LfleSjEsbsjF-nrrT□bo―►aOi5oe£e 3-W 1 叽’L31C-«tod2A如Line V1blLlBmietEr Sequer« Ar-n. yzerg Block Para meters: Three ・P hase SourceThree-Phase Source (nask} flink;Threc-phasG voltaze sourc G in seriei with RL bxanch.Param«rsPhase—to-phase rss voltage (V):110. 5e3Phase anrl4 of chase A (degreGs):1°FrtQuency (Hz):Internal connection:|Y厂Specify iaped&nce usins sh^xfcircuit levelSouree resistance (Otesi:|0. 009Source inductance (H):116. 58e-5Apply |OK Cancel H.lpBlock Parameters; Linel-Three-Phase PI Section Lin已ziaslc) (link)Thi® block inpleaents a three-phxt• PI section lint to represent a thiQG-phasG transaision line.This block rGpresents only one PI section. To inplenentc aore that one PI secti-on, you siaplr need to connect copies of this block in sexies・ParoaQtQTS -----------------------------------------------------------------------------------------------------------------Freauency used for R L C specification (Hz):F5Poiitive- ind zero-seauence resiBtances (Ohas/ka) [ K: RO ]:| [ 0.01273 0. 3SG4:Positive* and zero"£eo.uenc© inductances K-lcn) [ Ll LO ]:|T 0. 9327e-3 4. 1264e-3]Positive- and Z4ro--ssau4nee ea.Dacitane€5 (Fjks; I Cl CO I :I [12. 74e-9 7. 751e-9FLine section length (ka::1130OK Cancel Kelp Apply■OK Cancel I E«lp 厂 删 Function Block Parameters; AddlAdd cr subtract inputs. S^cify cne oi the fol.ovmg:a. string containing • or - for each input port, for spacer tetrem ports (e. c.—・Db) scalar >=】・ A value > 1 seal all inputs: 1 sunt •Itstnts of a single input vectorMain | Sifnal data typacIcon shaoe: | re:t&ngulax▼]List of sxcni:I 4**Sasple tme -1 fox lEherxted):卜】 X I Cancel 1 Help 1 Appl*Q c5s3.N/Mu hi meter 1Helpu*rbr*. Lc^dO Lo a>133 Uan: Ubri IZLc i U H : HiF MJ I C I/fault. B » Vb: IhrcQ-Pbazc C _lVb. IHtec ?hase Ja^lvl/Faulv AI AT. s ad!LcadOI CD Goad3lb: Ib"Q ・7hd" faultl/fault B lb: Ih^ec-?hasc F aulvl/Iau2V Cu» lb: Ihtrao ・7乃a=a FArjlt 1/FAult A —Z_JCown |R«rnve*f - 1zJUpdste 吕;Source Block Parameters; FromFroaKeceive sienals; froa the Goto block irith the specifiGd :as ・ If the tae is defined as r scoped , in the Gotoblock, then a Goto Tae Visibility bl-ock aust te used to define the visibility of the tac ・ After : UpdateDiafraa t the block icon displays the selected tag nase >Local taes are enclosed in brackets. .], and scoped tagna=es are enclosed in brae€g ; J).L^adO Loft<13 Load.3 Sele 匚T Measu errentsZJ d小 Plot Sd 》ded“E3Uworts^utput/cc:如加制Source Block Parameters; From4 「町〕一Fron----------------------------------------------sdcnalt froa the Octo- bl>ck with the specified tar- If the tae is d<tfin«d scon昼d‘ in the Goto bice匕then a Goto 7ar Visibility bloek aust beused to define the visibility of the tag. After ' Update Diaeraa, the block icon displays the selected tag naae(local tags are enclosed in brackets.:], and scoped tag nazes axe enclose! in braces::}〉・OK Cancel I Help Function Block Parameters: Discrete 3・phase Sequence Analyzer三相短路仿真波形如下:如图1―― a、b、c三相短路电流仿真波形图分析:正常运行时,a、b、c三相大小相等,相位相差120 度。
matlab实验报告

Matlab实验报告
院系:物理与电子学院
专业:电子信息科学与技术
姓名:
学号:
2013年12月18日
实验题目:Matlab中系统建模以及Simulink仿真模型。
实验环境:计算机Matlab软件。
实验目的:通过分析问题完成系统建模,然后通过matlab软件的Simulink完成对模型的处理,并绘制图像,得到
结果。
Simulink简介:Simulink是MATLAB最重要的组件之一,它提供一个动态系统建模、仿真和综合分析的集成环境。
在该环境中,无需大量书写程序,而只需要通过简单直观的鼠标操作,就可构造出复杂的系统。
Simulink具有适应面广、结构和流程清晰及仿真精细、贴近实际、效率高、灵活等优点,并基于以上优点Simulink已被广泛应用于控制理论和数字信号处理的复杂仿真和设计。
同时有大量的第三方软件和硬件可应用于或被要求应用于Simulink。
实验内容:1:利用simulink仿真来实现摄氏温度到华氏温度的转换,公式为f=9/5 *t+32。
2:设系统微分方程为:y`=x+y y(0)=0,试建立系统模型并仿真;
参数设置:设置开始时间Start Time=0;初始值
Initial Condition=0.
实验总结:通过这次Simulink 实验与设计,我们组对Simulink 以及Matlab 都有了更深的了解。
虽然实验内容比较基础,但从中我们能看出Simulink 和Matlab 在数学,物理和工程建模上的巨大作用。
并且,这次实验提高了我们组对Matlab 的学习兴趣和动手能力,这对我们今后的学习和工作都有着巨大的帮助。
MATLABSimulink与控制系统仿真实验报告
MATLAB/Simulink 与控制系统仿真实验报告姓名:喻彬彬学号:K031541725实验1、MATLAB/Simulink 仿真基础及控制系统模型的建立一、实验目的1、掌握MATLAB/Simulink 仿真的基本知识;2、熟练应用MATLAB 软件建立控制系统模型。
二、实验设备电脑一台;MATLAB 仿真软件一个三、实验内容1、熟悉MATLAB/Smulink 仿真软件。
2、一个单位负反馈二阶系统,其开环传递函数为210()3G s s s =+。
用Simulink 建立该控制系统模型,用示波器观察模型的阶跃响应曲线,并将阶跃响应曲线导入到MATLAB 的工作空间中,在命令窗口绘制该模型的阶跃响应曲线。
3、某控制系统的传递函数为()()()1()Y s G s X s G s =+,其中250()23s G s s s+=+。
用Simulink 建立该控制系统模型,用示波器观察模型的阶跃响应曲线,并将阶跃响应曲线导入到MATLAB 的工作空间中,在命令窗口绘制该模型的阶跃响应曲线。
4、一闭环系统结构如图所示,其中系统前向通道的传递函数为320.520()0.11220s G s s s s s+=+++g ,而且前向通道有一个[-0.2,0.5]的限幅环节,图中用N 表示,反馈通道的增益为1.5,系统为负反馈,阶跃输入经1.5倍的增益作用到系统。
用Simulink 建立该控制系统模型,用示波器观察模型的阶跃响应曲线,并将阶跃响应曲线导入到MATLAB 的工作空间中,在命令窗口绘制该模型的阶跃响应曲线。
四、实验报告要求实验报告撰写应包括实验名称、实验内容、实验要求、实验步骤、实验结果及分析和实验体会。
五、实验思考题总结仿真模型构建及调试过程中的心得体会。
题1、(1)利用Simulink的Library窗口中的【File】→【New】,打开一个新的模型窗口。
(2)分别从信号源库(Sourse)、输出方式库(Sink)、数学运算库(Math)、连续系统库(Continuous)中,用鼠标把阶跃信号发生器(Step)、示波器(Scope)、传递函数(Transfern Fcn)和相加器(Sum)4个标准功能模块选中,并将其拖至模型窗口。
Simulink仿真实例

2014年4月19日星期六
基于MATLAB/SIMULINK的系统建模与 bx 0 M x
构建的模型为
2014年4月19日星期六
基于MATLAB/SIMULINK的系统建模与仿真
Simulink仿真实例
因有阻尼器存在,故箱子最终会停止运 动。
基于MATLAB/SIMULINK的系统建模与仿真
Simulink仿真实例
其运动方程式为
M f bx x
拉力作用时间为2s,建构的模型为
2014年4月19日星期六
基于MATLAB/SIMULINK的系统建模与仿真
Simulink仿真实例
因有摩擦力存在,箱子最终将会停止前 进。
2014年4月19日星期六 基于MATLAB/SIMULINK的系统建模与仿真
2014年4月19日星期六
基于MATLAB/SIMULINK的系统建模与仿真
Simulink仿真实例
仿真过程中,设绳索长度-30m,起始速 度为0;物体质量为90kg,g为9.8m/s2,弹性 系数k为20,a1和a2均为1.
2014年4月19日星期六
基于MATLAB/SIMULINK的系统建模与仿真
Simulink仿真实例
仿真曲线为
2014年4月19日星期六
基于MATLAB/SIMULINK的系统建模与仿真
Simulink仿真实例
假设未伸长时绳索的端部距地面为50m, 为了得到更真实的曲线,将50减去输出位置
2014年4月19日星期六
基于MATLAB/SIMULINK的系统建模与仿真
Simulink仿真实例
2014年4月19日星期六
基于MATLAB/SIMULINK的系统建模与仿真
自动控制原理MATLAB仿真实验指导书(4个实验)
自动控制原理MATLAB仿真实验实验指导书电子信息工程教研室实验一典型环节的MA TLAB仿真一、实验目的1.熟悉MATLAB桌面和命令窗口,初步了解SIMULINK功能模块的使用方法。
2.通过观察典型环节在单位阶跃信号作用下的动态特性,加深对各典型环节响应曲线的理解。
3.定性了解各参数变化对典型环节动态特性的影响。
二、SIMULINK的使用MATLAB中SIMULINK是一个用来对动态系统进行建模、仿真和分析的软件包。
利用SIMULINK功能模块可以快速的建立控制系统的模型,进行仿真和调试。
1.运行MA TLAB软件,在命令窗口栏“>>”提示符下键入simulink命令,按Enter键或在工具栏单击按钮,即可进入如图1-1所示的SIMULINK仿真环境下。
2.选择File菜单下New下的Model命令,新建一个simulink仿真环境常规模板。
图1-1 SIMULINK仿真界面图1-2 系统方框图3.在simulink仿真环境下,创建所需要的系统。
以图1-2所示的系统为例,说明基本设计步骤如下:1)进入线性系统模块库,构建传递函数。
点击simulink下的“Continuous”,再将右边窗口中“Transfer Fen”的图标用左键拖至新建的“untitled”窗口。
2)改变模块参数。
在simulink仿真环境“untitled”窗口中双击该图标,即可改变传递函数。
其中方括号内的数字分别为传递函数的分子、分母各次幂由高到低的系数,数字之间用空格隔开;设置完成后,选择OK,即完成该模块的设置。
3)建立其它传递函数模块。
按照上述方法,在不同的simulink的模块库中,建立系统所需的传递函数模块。
例:比例环节用“Math”右边窗口“Gain”的图标。
4)选取阶跃信号输入函数。
用鼠标点击simulink下的“Source”,将右边窗口中“Step”图标用左键拖至新建的“untitled”窗口,形成一个阶跃函数输入模块。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
东南大学自动控制原理
实验报告
课程名称:自动控制原理
实验名称:Matlab/Simulink 仿真实验
院(系):电气工程学院专业:电气工程及其自动化姓名:学号:
实验室:实验组别:
同组人员:实验时间:2011 年12 月2 日评定成绩:审阅教师:
一、实验目的:
1.学习系统数学模型的多种表达方法,并会用函数相互转换。
2.学习模型串并联及反馈连接后的系统传递函数。
3.掌握系统BODE图,根轨迹图及奈奎斯特曲线的绘制方法。
并利用其对系统进行分析。
4.掌握系统时域仿真的方法,并利用其对系统进行分析。
二、预习要求:
借阅相关Matlab/Simulink参考书,熟悉能解决题目问题的相关Matlab函数。
三、实验内容:
1.已知H(s)=
0.051
(0.21)(0.11)
s
s s
+
++
,求H(s)的零极点表达式和状态空间表达式。
零极点表达式:
>> num=[0.05, 1];
>>den=conv([0.2, 1],[0.1, 1]); >>h=tf(num,den)
Transfer function:
0.05 s + 1
--------------------
0.02 s^2 + 0.3 s + 1
零极点表达式:
>> hi=zpk(h)
Zero/pole/gain:
2.5 (s+20)
------------
(s+10) (s+5)
状态空间表达式:
>> [P p k]=residue(num,den)
P =
-5.0000
7.5000
p =
-10.0000
-5.0000
k =
[]
>> h2=ss(h)
a =
x1 x2
x1 -15 -1.562
x2 32 0
b =
u1
x1 2
x2 0
c =
x1 x2
y1 1.25 0.7812
d =
u1
y1 0
Continuous-time model.
2.已知15()(1)(2)s H s s s s +=++,21()1H s s =+。
(1) 求两模型串联后的系统传递函数。
>> m1=[1,5];
>> n1=conv([1],conv([1,1],[1,2]));
>> m2=1;
>> n2=[1,1];
>> [m,n]=series(m1,n1,m2,n2)
m =
0 0 1 5
n =
1 4 5 2
>> G=tf(m,n)
Transfer function:
s + 5
---------------------
s^3 + 4 s^2 + 5 s + 2
(2)求两模型并联后的系统传递函数。
>> [m,n]=parallel(m1,n1,m2,n2)
m =
0 2 9 7
n =
1 4 5 2
>> G=tf(m,n)
Transfer function:
2 s^2 + 9 s + 7
---------------------
s^3 + 4 s^2 + 5 s + 2
(3)求两模型在负反馈连接下的系统传递函数。
>> [m,n]=feedback(m1,n1,m2,n2,-1)
m =
0 1 6 5
n =
1 4 6 7
>> G=tf(m,n)
Transfer function:
s^2 + 6 s + 5
---------------------
s^3 + 4 s^2 + 6 s + 7
3.作出上题中(1)的BODE图,并求出幅值裕度与相位裕度。
>> num=[1,5];
>> den=[1,4,5,2];
>> w=logspace(-1,2);
>> bode(num,den);
>> [g,p,wg,wp]=margin(num,den)
g =
18.0016 %幅值裕度
p =
67.3499 %相角裕度
wg =
4.7960 %-180o 相角频率
wp =
1.1127 %截止频率
伯德图
4.给定系统开环传递函数为2()(2)(25)K
G s s s s =+++,绘制系统的根轨迹图与奈奎斯特
曲线,并求出系统稳定时的增益K 的范围。
>> num=[1];
>> den=conv([1,2],[1,2,5]);
>> rlocus(num,den)
>> nyquist(num,den)
根轨迹图
奈奎斯特曲线
系统稳定时的增益K的范围
>> [r,k]=rlocus(num,den)
r =
1.0e+002 *
-0.0100 + 0.0200i -0.0100 - 0.0200i -0.0200 -0.0091 + 0.0205i -0.0091 - 0.0205i -0.0217 -0.0086 + 0.0209i -0.0086 - 0.0209i -0.0229 -0.0077 + 0.0215i -0.0077 - 0.0215i -0.0246 -0.0064 + 0.0226i -0.0064 - 0.0226i -0.0272
-0.0047 + 0.0243i -0.0047 - 0.0243i -0.0306
-0.0025 + 0.0268i -0.0025 - 0.0268i -0.0350
0.0002 + 0.0302i 0.0002 - 0.0302i-0.0403
0.0034 + 0.0347i 0.0034 - 0.0347i-0.0468
0.0073 + 0.0405i 0.0073 - 0.0405i-0.0545
0.0119 + 0.0477i 0.0119 - 0.0477i-0.0638
0.6241 + 1.1043i 0.6241 - 1.1043i-1.2883
Inf Inf Inf
k =
1.0e+006 *
Columns 1 through 11
0 0.0000 0.0000 0.0000 0.0000 0.0000 0.0000 0.0000 0.0000 0.0001 0.0001
Columns 12 through 13
2.728Inf
5.对内容4中的系统,当K=10和40时,分别作出闭环系统的阶跃响应曲线,要求用
Simulink实现。
K=10
闭环系统的阶跃响应曲线
K=40
闭环系统的阶跃响应曲线。