五自由度混联虚拟轴机床的设计
五轴联动虚拟电火花成形加工机床设计与应用_许晓琴

!"#$%& ’&( )**+$,’-$.& .& /$0-1’+ 2$3" ’ ’4$# 5$&6’%" 7$&6"0 8!9 9’,:$&"
)* )+,-.+/ ! ,0123 4565,/ !" ( !7-889:9 -; <9=>,/+=,8 ?/:+/99@+/: ,A,/=>9/: B/CD+D5D9 -; E9=>/-8-:6,A,/=>9/: $$!%&’ ,7F2; "7-889:9 -; <9=>,/+=,8 G ?89=D@+=,8 ?/:+/99@+/:,2,/H+/: */+I9@C+D6 -; 19@-/,5D+=C ,/J 1CD@-/,5D+=C,2,/H+/: $’%%’( ,7F2) &()*+,-* :B/ -@J9@ D- C-8I9 D>9 K@-L89MC -; 989=D@+= J+C=>,@:9 M,=>+/+/:( ?N<)-; D>9 =-MK89O C5@;,=9 ,, I+@D5,8 C+/P9@ ?N< M,=>+/9 +C =@9,D9JQ 7-/CD@,+/ @98,D+-/C ,@9 C9D 5K L9DR99/ M-D+-/ K,@DC ,/J D>9 M,D@+O D@,/C;-@M D9=>/-8-:6 +C 5C9J D- =>,/:9 D>9 K-CD5@9 -; D>9 =-MK-/9/D +/ D>9 M-J98Q E>9/ D>9 +/D9@K-8,D9 M9D>-J +C ,J-KD9J D- =-MK5D9 D>9 M-D+-/ K,D>C ,/J J@+I9 D>9 M-D+-/ ,O9CQ E>9 +/D9@C9=D+-/ -K9@,D+-/C ,@9 M,J9 L9DR99/ D>9 989=D@-J9 ,/J D>9 R-@P K+9=9Q E>9 I+@D5,8 C+/P9@ ?N< M,=>+/9 +C 5C9J D- C-8I9 D>9 ,=D5,8 K@-L89MC -/ ?N<Q ./012+3):?89=D@+= N+C=>,@:9 <,=>+/+/:;4+I9 S ,O+C T+/,:9;1CC9ML86 <-J98;U+@D5,8 <,=>+/9 E--8 虚拟加工机床是随着虚拟制造技术的发展而提出 的一个新的研究领域, 它的最终目标是为虚拟制造建 立一个真实的加工环境, 用于仿真和评估各加工过程 对产品质量的影响。在虚拟加工机床中需要建立机床 模型, 机床模型包括机床的几何参数、 运动关系、 伺服
五自由度并联机床虚拟样机建模与仿真

一一
园园 固 圈
]别引引_ 网…国 实一№旺随限怕慎m恢慨一现1.。.。I- 功r●●●●【能一刀具轨迹的星1∈验证一
==畦 SolidWorks API solidWorks
干涉碰撞检验
可加工性评价
一 P..。..,。.L一
一并联机床虚拟样机一加工零件模型 系统软件
一
I 矍堡兰鱼 I
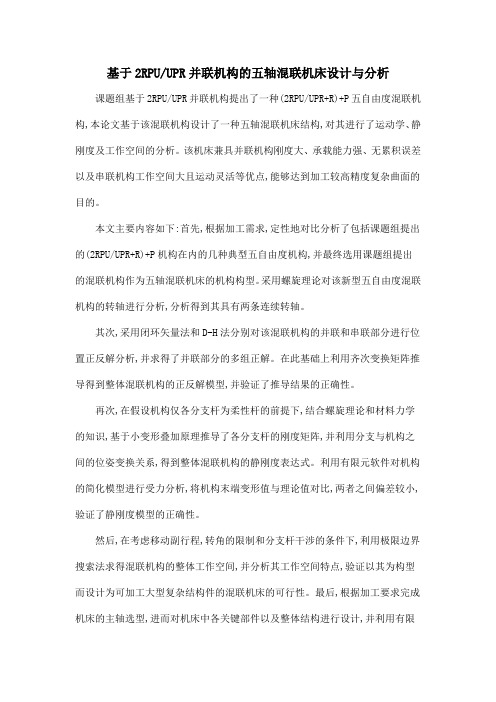
图2数控加工仿真系统框图
万方数据
农业机械学报
相同的驱动分支UPS(虎克铰一移动副一球副)以及 1个约束分支PRPu(移动副一转动副一移动副一虎克 铰)与定平台相连接。约束分支限制了动平台绕其 自身法线的转动。通过改变5个驱动杆的杆长,动 平台可在一定范围内实现不同的位置和姿态,使安 装在动平台上的刀具完成3轴至5轴的切削加工。 机床的机构简图如图1所示。
联机床的数控加工仿真、刀具轨迹显示验证和仿真过程中自动换刀与毛坯的自动设计,采用多体动力学仿真软件
ADAMS实现了该并联机床的动力学分析和仿真。计算机仿真结果证实了理论模型的正确性,验证了设计的合理
性和可靠性。
关键词:并联机床虚拟样机仿真动力学分析
中图分类号:THl22
文献标识码:A
Modeling and Simulation on Virtual Prototype of Novel Five.axis Parallel Machine Tool
零件的数控加工程序经过粗插补得到细化的刀 位数据以后,从中取出刀尖点位置坐标数据,将刀尖 点位置坐标按样条曲线连接形成刀具轨迹线,并在 图形显示器上显示出来。运动仿真过程中刀具模型 与刀位轨迹组合显示,随着刀具模型单步或连续地 移动。刀具轨迹也单步或连续地显示。 3.5材料切除过程三维实体图形仿真的实现
新型龙门式五轴联动混联机床机构设计及其基础理论研究

新型龙门式五轴联动混联机床机构设计及其基础理论研究细长结构件在航空航天、铁路运输、国防工业等领域具有广泛的应用。
本文针对细长结构件进行高速加工时机床应满足的刚度重量比大、响应速度快、加工精度高等性能要求,将一种新型的混联机构作为混联机床机械本体,设计出一种新型龙门式五轴联动混联机床。
其主要内容概括如下:进行了新型龙门式五轴联动混联机床机构的构型设计。
运用螺旋理论分析了该机床实现3T2R型运动模式的原理,提出了驱动件的选取方法,分析了机床机构的奇异性,提出了减少奇异的参数设计条件。
进行了新型龙门式五轴联动混联机床运动学分析。
运用矢量代数法对机床进行了位置逆解计算,在已知机床刀尖点位置和动平台姿态的条件下求得各驱动副的输入量;运用影响系数法求得机构一阶运动影响系数矩阵——Jacobian矩阵和二阶影响系数矩阵——Hessian矩阵。
进行了新型龙门式五轴联动混联机床动力学分析。
运用虚功原理基于对机床机构整体虚能量的计算建立此新型龙门式混联机床机构动力学模型。
给出了一个数值算例,用ADAMS仿真求证了此机床机构运动学、动力学分析模型的正确性。
给出了对一个细长结构件进行钻孔加工的实例,得出了钻孔加工过程中运动学及驱动力的变化规律。
进行了新型龙门式五轴联动混联机床的2-UPS+2-RPU并联机构静刚度分析。
基于小变形叠加原理,分析各杆在其约束力螺旋(包括驱动螺旋)作用下产生的弹性变形,建立支链约束力螺旋刚度矩阵。
通过动平台静力平衡及支链变形和动平台变形间的关系,建立机构的动平台位姿变化与外载荷关系,进而得到机构的整体柔度、刚度矩阵。
得出约束力/矩对这类少自由度过约束并联机构的刚度和变形影响很大,且其弹性变形主要产生在约束力/矩轴线方向。
对新型龙门式五轴联动混联机床进行了模态分析。
基于ANSYS Workbench 软件对新型龙门式五轴联动混联机床五种典型位置的模态进行了分析,确定在此位型下的前六阶固有频率及振型,通过振型云图及振动动画分析机床低阶振动规律,确定机床结构的薄弱环节,为新型机床的优化设计提供参考。
一种新型五自由度混联机床的运动及仿真分析

#设计与研究#
文章编号: 1001- 2265( 2005) 05- 0023- 03
一种新型五自由度混联机床的运动及仿真分析
王冰1, 高峰2, 运红丽3, 彭斌彬4, 岳义3
( 1. 华北航天工业学院 机械 工程系, 河北 廊坊 065000; 2. 上海交通 大学 机械与动力工程 学院, 上海 200030; 3. 燕山大学 机械工程学院, 河北 秦皇岛 066004; 4. 北京航空航天大学 机器人研究所, 北京 100083)
Abstract: A configuration of a new typed hybrid machine tool is proposed in this paper which take a new hybrid mechanism combined with two 2- DOF parallel mechanism as the main feeding mechanism and the assistance of two-way moving worktable to achieve five- coordinates numerical controlled machining . It has the characters of uncoupled and control easily. The mechanism is described and based on the screw theory, the kinematics characteristics of the five- bar spherical parallel mechanism are analyzed including the kinematics screw, reverse screw and degree of freedom. Closed- form solution are analyzed for both inverse and direct kinematics and ex amined and certified by numerical method. Based on the above, the kinematics of the hybrid machine tool are simulated by using OpenGL based on Visual C++ , so the idea and details of the design are tested. This research lays the foundation for manufacturing the prototype of the hybrid machine tool. Key words: hybrid machine tool; parallel mechanism; analyses of location and orientation; simulation of kinematics
一种五自由度并联卧式机床构型设计 (1)

万方数据
1070
机械科学与技术
第26卷
(上接第1066页)
图3五自由度并联卧式机床的末端运动特征
图4五自由度并联卧式机床样机
6结论 以运动单元为基础,研究了机构末端输出运动
的描述方法,提出了串联机构和并联机构两种不同 的概念设计方法,最后设计了一种五自由度并联卧 式机床样机,验证了理论分析的正确性。
实现沿球面的平动,根据前面定义的几种运动单元,
显然u‘携带的运动单元为E恐,其中单元的控制要
素R:是U’单元中上下两组虎克铰中心连线所在的
线矢量。
要实现三维平动,由式(2)得
£4-+E恐=C
(10)
因此,应与u+关节串联一移动副,考虑到上式
成立的条件是口,·恐≠0,两者在串联连接时要必
须满足这一几何关系。
5五自由度并联卧式机床构型实例
5.1尸U‘U支链的设计
根据并联机构的设计原则,由式(4)知,并联机
构末端的输出运动特征等于各支链运动特征的交
集,应此,要设计具有某种运动特征的并联机构,所
选用支链的末端运动特征必须等于或包含这一运动
特征。为此,首先设计具有三平动和两转动的运
动链。
文献[6]提出一种u’复合关节,末端构件能够
8cteristic8 of the end efl.ector.
Key words:mechaIlism;t),pe syll吐lesis;conceptual de8ign;kinemadc unit
机构作为运动的载体,广泛应用在各个领域,不 同的使用领域,对其末端执行器的输出运动特性提 出了不同的要求。普遍的观点认为机构构型问题就 是按照给定的要求,设计出具有确定自由度数目和 自由度性质的机构。目前主要存在4种构型理论。 即基于自由度计算公式的列举法…、基于螺旋理论 的型综合法【2’3】、基于李群李代数的型综合法H1和 运动综合法D’。J。
五轴联动数控机床的设计与研究
五轴联动数控机床的设计与研究随着机械制造业的发展,五轴联动数控机床已经成为了工业制造中不可或缺的一部分。
这种机床具有越来越广泛的应用前景,可以满足复杂薄壁零件的加工需求。
本文将从设计和研究两个方面介绍五轴联动数控机床的相关内容。
一、五轴联动数控机床的设计五轴联动数控机床是一种能够及时调整工作坐标系的机器,其中螺旋插补系统控制器的主轴是一种独特的五轴联动系统。
设计一个五轴联动数控机床需要考虑以下主要因素:1、传动系统传动系统是机床中一项非常重要的部分,直接影响到机床的性能。
在五轴机床中,采用齿轮传动和链传动的方法。
齿轮传动比链传动更加稳定、准确、耐用,一些精密机床也会使用直接驱动技术。
2、处理器和控制器五轴数控机床的处理器系统需要能够准确执行各种计算和运算任务,以便实现高度的控制精度和精准度。
同时,相关的控制器也需要能够实现高速的数据传输、控制和确保稳定性。
3、机械结构机械结构是机床中另一个非常重要的部分,通常采用刚性框架、机械手臂和伺服电机来实现五轴联动机床的稳定结构。
刚性框架具有高度的刚度和精度,可以保证零件的加工质量。
机械手臂则可以支持刀具运动,伺服电机则可以对刀具进行实时控制。
4、人机交互界面五轴联动数控机床需要有直观、易于操作的人机交互界面。
机床操作人员可以通过交互界面轻松调整五轴联动系数和各个轴的参数。
二、五轴联动数控机床的研究五轴联动数控机床的研究领域非常广泛,主要涉及以下方面:1、模型构建实现五轴联动的机床模型需要建立一个全球统一的数学模型,考虑到机床结构、动力和切削力等系数。
在五轴联动加工过程中,所有的轴向变量的运动都是依靠模型来进行研究和实践的。
2、刀路规划刀路规划在机床加工中是一个非常重要的环节,它直接影响到零件加工的质量。
在五轴联动中,刀路规划必须考虑到机床的轴向变量以及工件的加工要求。
为了提高零件的加工质量和加工效率,研究人员需要探索出一种先进的刀路规划算法。
3、控制技术五轴联动数控机床控制技术是这个领域的重点研究,它主要涉及到如何实现高精度控制和高速运动。
基于2RPUUPR并联机构的五轴混联机床设计与分析
基于2RPU/UPR并联机构的五轴混联机床设计与分析课题组基于2RPU/UPR并联机构提出了一种(2RPU/UPR+R)+P五自由度混联机构,本论文基于该混联机构设计了一种五轴混联机床结构,对其进行了运动学、静刚度及工作空间的分析。
该机床兼具并联机构刚度大、承载能力强、无累积误差以及串联机构工作空间大且运动灵活等优点,能够达到加工较高精度复杂曲面的目的。
本文主要内容如下:首先,根据加工需求,定性地对比分析了包括课题组提出的(2RPU/UPR+R)+P机构在内的几种典型五自由度机构,并最终选用课题组提出的混联机构作为五轴混联机床的机构构型。
采用螺旋理论对该新型五自由度混联机构的转轴进行分析,分析得到其具有两条连续转轴。
其次,采用闭环矢量法和D-H法分别对该混联机构的并联和串联部分进行位置正反解分析,并求得了并联部分的多组正解。
在此基础上利用齐次变换矩阵推导得到整体混联机构的正反解模型,并验证了推导结果的正确性。
再次,在假设机构仅各分支杆为柔性杆的前提下,结合螺旋理论和材料力学的知识,基于小变形叠加原理推导了各分支杆的刚度矩阵,并利用分支与机构之间的位姿变换关系,得到整体混联机构的静刚度表达式。
利用有限元软件对机构的简化模型进行受力分析,将机构末端变形值与理论值对比,两者之间偏差较小,验证了静刚度模型的正确性。
然后,在考虑移动副行程,转角的限制和分支杆干涉的条件下,利用极限边界搜索法求得混联机构的整体工作空间,并分析其工作空间特点,验证以其为构型而设计为可加工大型复杂结构件的混联机床的可行性。
最后,根据加工要求完成机床的主轴选型,进而对机床中各关键部件以及整体结构进行设计,并利用有限元软件得到机床完整模型在初始位姿和其他典型位姿下的静刚度值,并与理论值作对比,验证前文理论推导得到的静刚度模型的有效性,随后分析了机床模态,得到其固有频率和振动特性。
五轴联动加工技术与双轴转台结构设计

五轴联动加工技术与双轴转台结构设计五轴联动加工技术与双轴转台结构设计五轴联动数控机床是一种科技含量高、精密度高专门用于加工复杂曲的机床,这种机床系统对一个国家的航空、航天、军事、科研、精密器械、高精医疗设备等等行业,有着举足轻重的影响力,堪称“制造业之灵魂”。
五轴联动技术是我国走向强国的关键技术,尤其是把我国从制造大国转变成制造强国的基石,因为制造业包括的围很广领域较多,所以针对不同的工件则需要具有不同特点的设备,其中五轴联动机床的布局方案较多,各有各的优缺点。
1.1五轴联动机床发展五轴联动机床,满足空间曲面及任意轮廓的加工,一次装夹完成大量的加工工序,保证精度要求。
特别航空领域加工工艺的要求,对五轴联动机床提出多轴联动的同时,还要求机床主轴有较高的转速,因而在五轴联动机床上还应用了诸如高速主轴、高速控制系统、先进刀具技术等,首先是采用直线电机驱动技术。
经过十几年的发展,直线电机技术已经非常成熟。
其次是采用双驱动技术。
对于较宽工作台或龙门架型式,如果采用中间驱动,实际无法保证驱动力在中心,容易造成倾斜,使得动态性能较差。
使用双驱动,能使动态性能非常完美。
1.2五轴联动机床的种类及特点五轴联动机床有立式、卧式和摇篮式、NC工作台、C工作台+NC 分度头、C工作台十90OB轴C工作台+45oB轴、C工作台+A轴、轴NC主轴等类型。
如(图1)图11.2.1立式五轴加工中心这类加工中心是工作台回转轴。
设置在床身上的工作台可以环图2立式双轴回转工作台绕X轴回转,定义为A轴,A轴一般工作围30度至-120度。
工作台的中间还设有一个回转台,在图示的位置上环绕Z轴回转,定义为C轴,C轴都是360度回转。
这样通过A轴与C轴的组合,固定在工作台上的工件除了底面之外,其余的五个面都可以由立式主轴进行加工。
A轴和C轴最小分度值一般为0.001度,这样又可以把工件细分成任意角度,加工出倾斜面、倾斜孔等。
A轴和C轴如与XYZ三直线轴实现联动,就可加工出复杂的空间曲面,当然这需要高档的数控系统、伺服系统以及软件的支持。
新型五自由度并联机床机构学分析与控制系统开发
3、执行系统设计与调试:执行系统是控制系统的核心,需要根据控制系统 的指令实现对机床各轴的精确控制。执行系统的设计需要考虑执行器的选型、驱 动电路的设计等因素。在执行系统的调试过程中,需要通过对系统的性能进行测 试和优化,确保执行系统能够准确无误地完成控制任务。
参考内容
引言
并联机构是一种具有多个自由度的机器人机构,其运动学和动力学特性相较 于串联机构具有更高的复杂性和挑战性。三自由度并联机构作为并联机器人的一 种重要类型,具有广泛的应用领域,如制造业、医疗行业和航空航天等。然而, 其分析与控制策略的研究仍具有一定的难度和挑战性。本次演示将围绕三自由度 并联机构的运动学、动力学和控制策略等方面进行分析和研究。
三自由度并联机构的控制策略研究是实现其精确控制的关键。常用的控制策 略包括PID控制、模糊控制、神经网络控制等。这些控制策略的应用有助于实现 对三自由度并联机构的精确控制,提高其运动性能和稳定性。例如,PID控制可 以通过对误差信号的实时处理,实现对机构运动的精确调节。模糊控制可以通过 对不确定信息的处理,提高机构的鲁棒性和适应性。神经网络控制可以通过对历 史数据的学习和优化,实现对机构运动的智能控制。
机构学分析
新型五自由度并联机床机构主要由直线运动系统和并联机构组成。直线运动 系统实现沿X、Y、Z轴的移动,而并联机构则实现绕X、Y、Z轴的旋转。这种机构 的设计原则在于通过多轴联动,实现对加工对象的复杂形状和结构的准确控制。
新型五自由度并联机床机构的应用优势主要包括以下几点:首先,该机构具 有高刚性和高精度,能够确保加工过程的稳定性和准确性。其次,该机构采用并 联结构设计,具有自适应能力强、避障能力强等特点,可有效降低机床自身的误 差。最后,该机构具有广泛的应用领域,适用于航空、汽车、船舶等众多行业的 零部件加工。
五轴联动机床机构设计

本科毕业设计(论文)通过答辩摘要五轴联动加工中心有高效率、高精度的特点。
若配以五轴联动的高档数控系统,还可以对复杂的空间曲面进行高精度加工,更能够适应像汽车零部件、飞机结构件等现代模具的加工。
本文设计了一台五轴联动机床主轴模型,在XY工作台的基础上叠加两层托板,步进电动机带动轴使其做旋转运动,构成类似陀螺仪的结构。
分别实现工作台绕XY轴的转动和移动,再沿Z轴装配一根丝杠完成工作台沿Z轴的上下运动最终实现刀具向各个面进行加工。
主要完成了:模型整体结构设计,各个轴的结构设计及计算、滚珠丝杠、轴承和直线滚动导轨的选择及其强度分析;步进电机的选择及分析。
关键词五轴联动丝杠传动陀螺仪1本科毕业设计(论文)通过答辩AbstractFive-axis machining center with high efficiency and precision characteristics. If accompanied by high-end CNC five-axis system, can also carry out complex curved surface precision machining, more able to adapt as automotive components, aircraft structural parts and other modern mold processing.This paper designed a five-axis machine tool spindle model, based on the XY table overlay two pallets, stepper motor drive shaft rotation to do so constitutes a similar gyro structure. Were achieved around the XY axis rotating table and move along the Z axis and then complete the table assembly of a screw up and down movement along the Z axis to the ultimate realization of the various surface processing tool.Main completed: overall structural design model, each shaft structure design and calculation, ball screws, bearings and linear motion guide the choice and strength analysis; stepper motor selection and analysis.Keywords five-axis gyro screw drive2本科毕业设计(论文)通过答辩目录摘要 (1)Abstract (2)第一章绪论 (5)第二章总体方案的设计 (6)2.1设计任务 (6)2.2设计方案的论证 (6)2.2.1传动方式的确定 (6)2.2.2 陀螺仪机构的设计 (6)2.3 总体方案的设计及结构组成 (6)第三章 XY工作台及绕XY旋转工作台的设计 (8)3.1 XY工作台的设计 (8)3.1.1主要设计参数及依据 (8)3.1.2 XY工作台部件进给系统受力分析 (8)3.1.3初步确定XY工作台尺寸及估算重 (8)3.2绕XY旋转工作台的设计 (8)3.2.1主要设计参数及依据 (8)3.2.2绕XY旋转工作台受力分析 (9)3.2.3初步选定绕XY旋转工作台的尺寸及重量估计 (9)3.3 沿Z向移动工作部分设计 (9)第四章滚珠丝杠副的选型与计算 (10)4.1滚珠丝杠的选型 (10)4.2 滚珠丝杠副导程的确定 (13)4.3 滚珠丝杠副的传动效率 (14)第五章直线滚动导轨的选型 (15)5.1定位精度高 (15)5.2降低机床造价并大幅度节约电力 (15)5.3可提高机床的运动速度 (15)5.4可长期维持机床的高精度 (15)5.5直线滚动导轨副的计算与选型 (16)5.5.1滑块承受工作载荷F max的计算及导轨型号的选取 (16)5.5.2距离额定寿命L的计算 (16)第六章步进电机的参数与选型 (17)6.1步进电动机的特点 (17)6.2 步进电动机的分类 (17)6.2.1反应式步进电动机 (17)6.2.2永磁式步进电动机 (17)6.2.3混合式步进电动机 (17)6.3步进电动机的参数及其选择 (18)6.3.1步距角的选择 (18)6.4电动机的转速与功率 (19)6.5各参素的确定 (19)3本科毕业设计(论文)通过答辩6.6初选步进电动机型号 (20)6.6.1脉冲当量的选择 (20)6.6.2等效负载转矩的计算 (20)6.6.3等效转动惯量计算 (20)6.6.4步进电动机型号选择的计算 (21)第七章轴、轴承及联轴器的选用 (26)7.1轴的材料 (26)7.1.1轴的分类 (26)7.1.2轴的材料及选择 (26)7.2 轴的结构设计 (26)7.2.1轴头、轴颈和轴身 (26)7.2.2轴上零件的轴向固定和定位 (27)7.2.3轴的周向固定: (27)7.2.4减少应力集中的措施 (27)7.3轴承的选用 (28)7.4联轴器的选用 (28)第八章连接部分 (31)8.1 螺纹紧固件的联接画法 (31)致谢 (33)参考文献 (34)4本科毕业设计(论文)通过答辩第一章绪论五轴联动数控是数控技术中难度最大、应用范围最广的技术。
五轴联动数控雕刻机结构设计

五轴联动数控雕刻机结构设计五轴联动数控雕刻机是一种先进的机械设备,广泛应用于木工、石材、金属等材料的雕刻加工领域。
它的结构设计非常重要,直接影响到设备的使用效率和加工质量。
本文将介绍五轴联动数控雕刻机的结构设计,包括机床结构、导轨选型、主轴设计等方面,希望能够为相关行业提供一些参考和借鉴。
1. 机床结构设计五轴联动数控雕刻机的机床结构是其重要组成部分,直接影响到设备的稳定性和精度。
通常采用龙门式结构或移动台式结构。
龙门式结构适用于大型工件的加工,其X、Y、Z轴的移动分别由龙门樑和立柱完成,结构稳定,刚度高,适合高速、高精度的加工。
移动台式结构适用于小型工件的加工,其Z轴移动由主轴完成,X、Y轴移动由工作台完成,结构简单,适合高速、高效的加工。
在机床结构设计的过程中,需要考虑到工件的尺寸、加工精度和加工效率等因素,选择合适的结构类型。
2. 导轨选型在五轴联动数控雕刻机的结构设计中,导轨的选型是非常关键的一步。
导轨的质量直接影响到机床的稳定性和精度。
目前市面上常用的导轨有滚动导轨和滑动导轨两种。
滚动导轨具有刚度大、精度高、使用寿命长的优点,适用于高精度的加工;滑动导轨具有摩擦小、抗冲击性好的优点,适用于高速的加工。
在导轨选型的过程中,需要根据设备的使用环境和加工需求综合考虑,选择合适的导轨类型。
3. 主轴设计五轴联动数控雕刻机的主轴是其核心部件之一,直接影响到加工质量和效率。
主轴的设计需要考虑到转速范围、功率、扭矩、刚度等因素。
通常采用串联或并联多电机驱动的方式来实现主轴的多轴联动。
串联多电机可以有效提高主轴的转速和功率,适用于高速、高精度的加工;并联多电机可以提高主轴的扭矩和刚度,适用于重载、切削加工。
在主轴设计的过程中,需要充分考虑到加工材料、加工工艺和加工精度等因素,选择合适的主轴类型和驱动方式。
4. 运动控制系统设计五轴联动数控雕刻机的运动控制系统是其关键部件之一,用于控制机床的各个轴的运动。
一种混联机床运动学建模及研究

摘要 :为了研究少 自由度结构的混联机构并联机床运动学问题 ,提高机床在 加工过程 中的运动控制 精度 ,本文 以一 种 五 自由度新型重型混联机床 一X Z 2 3 N H 4 0为例 ,分析 了其几何结 构 ,对该类 型机构进 行了深入 的研究 ,推导并建 立了其运
学逆解 。前者涉及到已知末端 执行 器的位置 、速度
图 1 龙 门式混联铣床 X Z 2 3 N H 4 0外观 图
该机床外观如图 1 所示 ,龙 门平 面 内是一种平 面
二 自由度并联机构 ( R ,由左右 滑块 、动平 台和 4 P R)
和加速度反求各驱动轴的运 动 ,后者涉及到 已知各驱 动轴 的运动 ,求末 端执行 器的运 动 。本文 以清华大 学 自主研制 的 X Z 23 N H 4 0混联机床为例 ,对其运动学
Ab t a t I r e e e r h t e kn mais p o lm f h w  ̄e d mssr c u eh b d me h ns a allma h n o , a d sr c : n o d rt rs ac h i e t r b e o e f o c t e e o tu t r y r c a im p l c ie t l n i r e o i r v h rc s n o e moin c n r l n h n i i wok n , a 5 a i n w h a y h b d ma h n o l mp o e te p e i o f h t o t l g w e t s r i g i t o oi - xs e e v y r c ie t o ,XN 2 3 a t d e i ZH 4 0 w s su id, i e merc lsr cu e wa ay e t g o t a t t r sa l z d, a d t e fr r o ui n mo e n n e s o u in mo e fk n ma iswee b i . s i u n n h wad s l t d l d i v re s lt d l i e t r ul o o a o o c t
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
淮阴工学院毕业设计说明书(论文)作者: 张XX 学号:XXXXXXXXXX学院: 机械工程学院专业: 机械设计制造及其自动化题目: 五自由度混联虚拟轴机床的设计指导者:(姓名) (专业技术职务)评阅者:(姓名) (专业技术职务)2012 年 5 月摘要并联机床又称为虚拟轴机床是机构学理论、机器人技术与数控技术结合的产物,其原型是并联机器人操作机。
针对传统数控机床和现有并联机床不足之处,借鉴了传统数控机床和现有并联机床的优点,将串联结构与并联结构有机融合,通过机型综合,提出了一种混联结构并联机床。
在本次设计中,主要设计的是“3 并联轴+2 串联轴”的五坐标联动,机床的研制分为二大部分:一是确定其机械结构方案包括机床机架设计;动平台设计;终端执行器设计等。
二是研制控制电路和控制软件等。
机床应有三个性能指标:对称性、工作空间、各向同性的基础上来设计混联机床。
最终设计出了机床的基本结构,并用CAD完成了样机的绘制。
关键词:并联机床虚拟轴机床并联机构自由度ABSTRACTParallel machine tools(PMTs),which also called virtual axis machine tools(V AMTs),is an combination outcome of robotic technology and numerical control technology. Its prototype is parallel robotic manipulators.Aiming at the deficiency of traditional NC machine tool and parallel machine tool, the advantages of traditional NC machine tool and parallel machine tool are used for reference, three hybrid type PMTs, which combine serial structure with parallel structure, are proposed in this dissertation through type synthesis, and Invention patents have been applied for them.In this design,the main design is that five coordinates axes move together throng three parallel axes and two inseries axesThe research and manufacture of machine tools consist of two parts. At first, mechanical structure scheme includes design of machine tools shelfand move platform and end effector, etc. Second, there are study and manufacture of control circuit and so on. There are three performance indexes: symmetry.,workspace,isotropy. On the basis of these, series-parallel machine tools were designed.At last me designed the basic structure of the tool machine, counteracted the tool of CAD to complete the kind machine to draw.Keywords: Parallel Machine Tool Virtual Axis Machine Tool parallel mechanism2目录摘要 (1)第一章绪论 (1)1.1 课题研究的目的和意义 (1)1.2 国内外研究现状 (3)1.2.1 并联机床发展历史回顾 (3)1.2.2 并联机床的研究现状 (4)第二章混联虚拟轴机床结构与设计 (6)2.1 并联机床的结构 (6)2.1.1 并联机床的结构要素 (6)2.1.2 并联机床的典型结构 (6)2.2 并联机床的理论设计方法 (8)2.2.1 原始参数确定 (8)2.2.2 概念设计和运动综合 (8)2.2.3 控制系统设计和标定 (9)2.2.4 样机试制与性能试验 (9)第三章混联虚拟轴机床并联部分的设计 (10)3.1 毕业设计课题和机床参数的确定 (10)3.2 并联机床的概念设计 (10)3.2.1 杆机构配置 (10)3.2.2 立柱方案与驱动方式的选择 (11)3.2.3 空间自由度的选择 (11)3.3 并联机床的主要部件的选择 (14)3.3.1 球铰的选择 (14)3.3.2 主轴部件的选择 (15)3.3.3 驱动装置的选择 (16)3.4 并联机床的总体布局方案 (20)3.4.1 立柱方案的选择 (20)3.4.2 工作空间综合 (21)3.4.3 动平台与球铰座设计 (23)3.4.4 蜗轮蜗杆减速器的设计 (24)3.4.5 直线电机的选择 (27)3.4.6 滑鞍部件的设计 (28)3.5 机床串联部分的结构 (29)3.6 并联机床的最后总体结构 (30)第四章并联运动机床的展望与绿色制造 (33)4.1 并联运动机床的展望 (33)4.2 并联运动机床与绿色制造 (33)第五章结论 (35)参考文献 (36)致谢 (37)附录 (38)第一章绪论当传统数控加工机床取代普通机床后,生产能力和产品质量有了大幅度的提高。
进入20世纪90年代后,汽车工业及其他制造加工业的迅猛发展变化对加工设备不断提出更高的要求,在精度、速度、加工灵活性及加工装备自身的生产周期和成本等方面尤其突出。
而传统数控加工机床已不能满足更高的要求,各国纷纷加强对新一代制造装备的研究,对于制造装备的技术含量,已成为衡量一个国家制造业水平的重要标志之一,它对于促进国家的制造竞争力的提高具有重要意义。
以并联机床为代表的新一代机床已成为制造业高速发展的新的领域。
1.1课题研究的目的和意义在激励竞争的21世纪,科学技术的竞争已经成为各国综合实力的竞争中心,对于关系着国家经济命脉制造业来说,必须在风云变幻和不可预测的全球化市场环境中始终保持创新进步的发展方向和领先的技术水平。
纵观世界装备制造业的发展,鲜明的特征已经对我国的制造业指明了方向。
首先,制造业的地位不断基础化,发达国家重视装备制造业的发展,不仅因为其在本国工业中所占比重、积累、就业、贡献均占前列,更在于装备制造业为新技术、新产品的开发和生产提供重要的物质基础,是现代化经济不可缺少的战略性。
其次,经济规模化和全球化,全球化的规模生产已经成为各大跨国制造业公司发展的主流。
在不断联合重组,扩张竞争实力的同时,各大企业纷纷加强对其主干业务的投资与研发,不断提高系统成套能力和个性化,多样化市场适应能力,全球化转向传统的全球化方式是以母国为生产基地,将产品销往其他国家。
新的全球化方式是在海外投资建立生产制造基地,在国外制造产品,销售到东道国或其他国家。
其特点是:自己拥有制造设施与技术,产品完全由自己制造;在资源的利用上,仅限于利用东道国的原材料、人员或资金等。
再次,产品高技术化以信息技术为代表的现代科学技术发展,对机械制造业提出了更高、更新的要求,各个国家和地区,特别是发达国家更重视发展机械制造业,充分体现了机械制造业作为高新技术产业化在推动整个社会技术进步和产业升级中不可替代的基础作用,即使是迈进"信息化社会"的工业化国家,也无不高度重视机械制造业的发展。
随着全球化的浪潮,现代装备制造业出现了从全球向中国及东南亚地区转移大趋势,中国的装备制造业也进入了跨越式快速发展新时期,由于中国的劳动力资源和工业工业资源丰富,社会稳定,经济迅速发展,中国即将成为名符其实的“世界工厂”,然而随着科学技术水平的不断发展,对与我国的机械装备制造行业在面对机遇的同时也面临着相当的挑战:首先,就目前我国机械装备制造业的现状而言,企业平均规模较小,缺少一批对行业具有较强拉动作用和竞争实力的大企业,制造工艺和装备的进步都以小改革为主,同时科研和开发应用存在着一定的脱节,在先进制造领域,我国缺乏一种蓬勃发展的动力。
其次,整体装备水平落后,先进制造技术仍然应用不足。
虽然个别企业技术装备水平较高,但从整体上与国外机械制造业的水平相比还相对老化。
再者,我国企业技术创新能力较弱,特别是核心技术、高新技术应用少,产研结合不紧密等等。
总之,由于科技水平的差距,我们国家的科技人员一直是在学习西方的先进技术,也取得了一定的成果,但是不能超越西方,究其原因,一方面与技术基础有关,一方面最重要的还是缺少创新,创新是一个民族进步的灵魂,没有创新,我国将始终处于“拿来主义“的尴尬境地。
并联机床是空间多自由度机构在数控机床工业中的创造性应用,它是机构学理论、机器人技术、数控技术相结合的产物,自其1994年在美国芝加哥机床展上首次面世即被誉为是“21世纪的机床”,成为机床家族中最有生命力的新成员。
由于这种机床具有高刚度、高承载能力、高速度、高精度以及重量轻、机械结构简单、制造成本低、标准化程度高等优点,在许多领域都得到了成功的应用,因此受到学术界的广泛关注。
由并联、串联同时组成的混联式数控机床,不但具有并联机床的优点,而且在使用上更具实用价值。
随着高速切削的不断发展,传统串联式机构构造平台的结构刚性与移动台高速化逐渐成为技术发展的瓶颈,而并联式平台便成为最佳的候选对象,而相对于串联式机床来说,并联式工作平台具有如下特点和优点:(1)结构简单、价格低。
机床机械零部件数目较串联构造平台大幅减少,主要由滚珠丝杠、虎克铰、球铰、伺服电机等通用组件组成,这些通用组件可由专门厂家生产,因而本机床的制造和库存成本比相同功能的传统机床低得多,容易组装和搬运。
(2)结构刚度高。
由于采用了封闭性的结构(closed-loop structure)使其具有高刚性和高速化的优点,其结构负荷流线短,而负荷分解的拉、压力由六只连杆同时承受,以材料力学的观点来说,在外力一定时,悬臂量的应力与变形都最大,两端插入(build-in)次之,再来是两端简支撑(simply-supported),其次是受压的二力结构,应力与变形都最小的是受张力的二力结构,故其拥有高刚性。