缆索维护机器人气动系统设计研究
绳索驱动并联机器人的静力学优化与机构设计

cables are unable to push the moving platform,which brings with a huge challenge of
the motion control for CDPMs.Thus we begin our research with the special problems
(4)在8根绳索驱动的6自由度并联机器人上进行了MATLAB仿真实验, 从而验证了理论结果和算法性能。此外,在ADAMS中搭建了6自由度绳索驱 动并联机器人平台,综合力可行、拉力分布和机械设计三部分内容,实现了并 联机器人的运动控制仿真。
关键词:绳索驱动并联机器人工作空间力封闭力可行机构优化绳索拉力 分布ADAMS
中国科学技术大学学位论文授权使用声明
作为申请学位的条件之一,学位论文著作权拥有者授权中国科学技术大学 拥有学位论文的部分使用权,即:学校有权按有关规定向国家有关部门或机构 送交论文的复印件和电子版,允许论文被查阅和借阅,可以将学位论文编入《中 国学位论文全文数据库》等有关数据库进行检索,可以采用影印、缩印或扫描 等复制手段保存、汇编学位论文。本人提交的电子文档的内容和纸质论文的内 容相一致。
WFW is proposed.
(3)For cable-driven parallel manipulators(CDPMs)with redundant cables,there
problem,a are an infinite number of tension distributions.To resolve this
of CDMPs.In this dissertafion.our research includes wrench.closure workspace
履带式缆索机器人系统的研制
r I e e o m e to a l r I eD v l p 1 n f Cr w e
Z E oy u' UC agj H NGDa—o O hn -n i
( . c a i l n ier gC l g , hj n nv ri f eh oo yColg , n z o , hj n , 10 4:. hj n 1Meh nc gn ei ol e Z ei gU ies yo T cn lg l e Hag h u Z ei g 3 0 1 2 Z ei g aE n e a t e a a Id s y& Ta e o  ̄ o a C l g , nh u Z ei g 3 0 0 ) n ut r rd c in l ol eWez o , hj n , 1 0 0 V e a
c m posto ft o o ii n o r boti w n c he sne a d om p c .I lo de l iee sr m o ec to yse , h c d pt o t o k nvio a t tas veopsw r ls e t on r ls tm w i h a a st hew r e r nm e nt
Abs rac : o h v i t t T a e a hI e fce c n e u i i t n n e wo k t i p p rp e e t a c a e —y e c b e sa e o o fi in y a d s c rt ma n e a c r , h s a e r s n s r wl rt p a l —t y d r b t y
测 清洗机器人 、管外移动机器人 、电线检测机器人 、
爬 树机器人等方面 的研究更 为广 泛和深入 日本 三菱 电机公司研制 出电线检测机 器人 ,其爬行机构采用 了
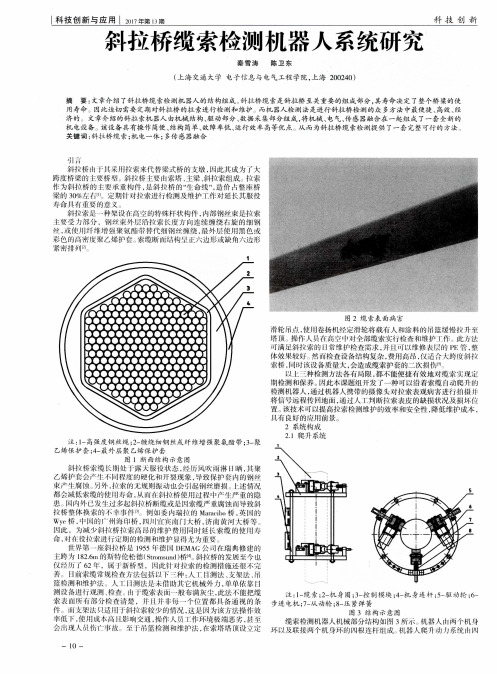
斜拉桥缆索检测机器人系统研究
紧 懈排 列I
1
图 , 使 用 卷扬 机经 定 } f } 轮将 载 有 人 和涂 料 的 吊赫缓 慢 札 『 I 争 塔 顶、 操 作 人 员存 高 空 中对 全 部缆 索 实行 检 查 l f 1 I 维} , l I 作 此, J ‘ 法 I 丁 满 足斜 { 索 的 ¨常维 护 检 盘需 求 , 并且 一 可 以 维 修 0 I ' E : , 体 效 果较 好 然 检 企 没 备结 构复 杂 , 费川 高 } , 仪通/ \ 人跨 瞍斜 十 索桥 . 时 陔设 备质 量 大 , 会造 成 缆索 护 套 的二 : 7 欠 ̄ I O J 、 ' 以 卜i种榆 测 方 ‘ 法各 有 局 限 , 都 不 能 便捷 ‘ 效 地 刈 缆 索 实现 定 期 检 测 和保 养 。 冈此 本 课题 组 开发 了一 种 可 以 } 什符索缆 『 I 动 爬 的 检 测 机 器人 , 通 过机 器 人 携带 的摄 像 、 大对 托 索 表 脱痫 害 进 仃 于 f 1 搬J i : 将信_ u ‘ 远程传叫地面 , 通过人 1 判断拉索表皮的缺损状 及损坏 佗 置。 该技 术 u T 以提 高 拉 索检 测 维护 的效 率 和安 令 , 降低 维 护 成 小 , _ 干 『 良好 的应 J 『 】 前景。
j i
斜{ } 乔 … rj C 采 川托 索 来代 替 梁 式 桥 的支 墩 , I l 七 j e 成为 r 大 跨 度 桥 的 主 桥 斜 托 桥 主要 『 } 1 索塔 、 主梁 、 斜托 索组 成 、 { 索 作 为斜 托 桥 的 主 要 承重 构 什 , 足斜{ 桥的” 生命线” , 造价 - 序 桥 梁的 3 0 %_ 岸 … . . 定 期 针对 托 索进 行 榆 测及 维 护 f 1 - . x , J ‘ 延 K』 服 役 群命 r 巫 的 意 义 . 斜{ 索 足 冲l 架 设 空 的特 殊 杆 状 构件 , 内 邴钢 丝 柬 足批 索 卜 受 力 部分 ,俐 丝 柬 外 沿 托 索 长 度 厅 向 连续 绷 绕 旋 的细 钢 成 他 川 纤 维增 聚氯 带 替 代 细 俐 丝缠 绕 , 最 外J 使 J 1 1 黑 色或 彩 乜 的I 乙烯 护 企 、 索 缆 断 结 构 正 六 边形 或 缺 『 f 】 ^ 边 形
缆索检测机器人的系统设计与动力学仿真研究
・
4 0・
机床与液压
第4 0卷
斜拉杆 ,拉杆依靠两边之 间的连 接支架 销接在 一起 , 这种机体能很好地克服由于机器人受不平衡外力作用 而产生 的扭 曲和形变等现象 。为了减少 系统所需要 的 驱动力并使 三边 的驱动力差值最小 ,机器人的机体在 缆索上采 用倒三 角形 的方式安装 。 1 2 运 动控 制 系统 的设 计 .
机器人在运动过程 中要求连续 、平稳 、低速 。以
动学仿真分 析 ,分别 研究 了作 用 不 同预紧 力 ( 紧 夹 力) 、摩 擦因数 、倾斜 度对机器人 稳定性 和驱动力 矩
的影 响 。
2 1 稳 定性仿 真 分析 .
往很多检测机器人采用的是直流电机提供驱动力 。考 虑 到在 同样功率下直流 电机与步进电机相 比虽然体积 小 、质量轻 ,但是直流 电机本身的速度 比较高 ,通 常 需 要使用 减速器 。同时为 了保 证速度 和位置 的精度 , 还需要使 用传感 器来充 当反馈环节 ,系统设计方案 中 机器人采用步进 电机完成 驱动。步进 电机不仅速度和 位置控制精确 ,也不需 要减速装 置 ,大大减少 了机构 的复杂性 。传动系统采用 同步带传送 ,在满 足使用要 求 的同时又能够提 高低速时 的系统传动效 1 3 检测 系统 的设 计 . 。
以轴 向旋 转作 为研究对象 ,研究缆索检测机器人 在不受 电机扭矩的作用下 ,由于采用倒三角方式安装 及重力作用使机器人产生绕缆索旋 转情况下来考察作 用不 同预紧力 ( 夹紧力 ) 、摩擦 因数 、倾斜度 对机器 人运动稳定性 的影 响。 2 11 摩擦 因数的影响 .. 设 置 压 紧 力 为 。 。
进检测机器人工作过程 中的稳定性 、提高相应 的驱动力矩 ,提 出了一种新型 的电驱动缆索检 测机器人 系统设计方案 。基 于
斜拉桥缆索检测机器人系统

探索与其他技术的结合,实现更 加智能化的斜拉桥缆索检测和运
维管理。
针对不同类型和规模的斜拉桥, 开展更为广泛的应用实验和研究 ,进一步验证系统的可行性和实
用性。
THANKS
感谢观看
设计安全防护系统,包括防跌落、防碰撞等功能 ,保障机器人的安全运行。
机器人样机制作与测试
1 2
制作样机
根据设计图纸和技术要求,制作斜拉桥缆索检测 机器人样机,确保各部件的精度和稳定性。
性能测试
对样机进行性能测试,包括传感器精度测试、移 动平台运动性能测试、越障机构可靠性测试等。
3
环境适应性测试
在模拟斜拉桥环境的条件下,对机器人进行长时 间运行测试,验证其稳定性和可靠性。
机器人结构
主要包括机械结构、驱动系统、感知系统、控制系统 等部分。
性能指标
包括运动速度、定位精度、检测精度、工作范围、负 载能力等。其中,运动速度要求机器人能够实现快速 移动和精确定位;定位精度要求机器人能够实现高精 度的空间定位和路径规划;检测精度要求机器人能够 准确识别和评估缆索的损伤、老化、腐蚀等问题;工 作范围要求机器人能够在不同的工作环境中稳定运行 ;负载能力要求机器人能够承受一定的外部载荷和自 身重量。
时监测和控制。
远程监控
通过远程监控技术实现对机器人 的远程控制和状态监控,确保检
测任务的顺利完成。
04
机器人系统实现方法
系统硬件设计
缆索检测传感器
设计用于测量缆索直径、表面损伤等指标的传感器,采用非接触 式测量方法,确保准确性和安全性。
机器人移动平台
设计具有良好稳定性和灵活性的轮式移动平台,能够适应斜拉桥的 复杂地形和恶劣环境。
器人的安全运行等。
气动爬绳机器人的研制讲解

目录摘要 (I)ABSTRACT (II)1绪论 (1)1.1机器人发展状况 (1)1.2机器人的应用 (1)1.3课题背景和研究意义 (2)1.4本课题的发展状况 (3)1.5本课题要求完成的工作 (4)2总体设计 (6)2.1爬行器的功能分析 (6)2.2爬行器总体构成设计 (6)2.3系统的工作原理和控制原理 (7)2.3.1系统工作步骤说明 (7)2.3.2系统的气动控制原理 (8)3机械结构设计 (9)3.1机械机构总体布置说明 (9)3.2各部件的设计计算 (9)3.2.1爬行器上下面板的选择和布置 (9)3.2.2连接螺栓的设计计算 (10)3.2.3爬行器的重量计算 (10)4气动系统设计 (12)4.1气动系统的选择计算 (12)4.2气动系统的选择计算 (12)4.3夹紧气缸力学分析 (13)5控制系统部分 (16)5.1控制系统方案说明 (16)5.2 AT89S52单片机 (16)5.3单片机驱动部分 (19)5.4无线数据收发模块功能介绍 (19)5.4.1无线数据收发模块电路图 (19)5.4.2程序流程图 (23)5.5传感器的选择和试验 (24)结论 (25)参考文献 (26)致谢 (27)附录 (28)摘要本文提出了一种以气压驱动的蠕动爬绳机器人的设计方案,该方案以气缸的运动带动机器人夹持机构实现对绳索的夹紧。
然后通过爬升气缸的收缩和伸长来实现机器人的爬升动作。
系统控制部分采用AT89S52单片机为控制核心,为了方便对机器人的控制,通过无线遥控模块对机器人的运动状态进行遥控。
关键词:爬绳;蠕动;机器人ABSTRACTThe paper presents a design scheme of robot which is driven by gas. In this scheme,,the crank structure is driven by the piston clutches the rope.Two crank structure are approached by a latex driver ,which can felx under pressure .When the crank structure and latex driver operate together,robot can squirms up and down .The MCU AT89s52 is used as the core of the control system.In order to control the proposed robot conveniently,Telecom module is applied to operate its kinematic state.Key words: Climbing-rope ; Peristalsis; robot1. 绪论1.1机器人发展状况随着现代工业的蓬勃发展,特别是进入二十世纪以来微电子技术的飞速发展使得机器人技术也有了长足的发展。
缆索机器人项目进度计划与控制研究的开题报告
缆索机器人项目进度计划与控制研究的开题报告一、课题背景及研究意义缆索机器人是一种改变了传统机器人“脚底板式”运动方式的新型机器人。
它通过一根或多根缆索作为支撑,并按照缆索的拉升和放松来实现前进、后退、上下等运动。
缆索机器人在建筑、巡检、搜索救援等领域具有广阔的应用前景。
缆索机器人在使用过程中,需要将运动轨迹和控制精度统一管理,建立进度计划和控制系统,以减少运行中发生的意外及故障,提高运行效率和安全性。
因此,缆索机器人项目进度计划与控制成为该领域的重要研究方向。
二、研究内容和主要任务2.1 研究内容本研究将依据缆索机器人的运动特点,建立缆索机器人项目进度计划与控制系统,主要研究内容包括:1.制定缆索机器人进度计划及优化方案,考虑进度计划的合理性和场地环境等因素;2.建立缆索机器人运动模型,探究控制精度的关键因素及控制策略;3.研究缆索机器人自适应控制算法并进行优化,应对不同运动状态下的复杂控制环境;4.实现缆索机器人的进度控制和路径规划,并优化控制系统。
2.2 主要任务1.分析项目需求和场地条件,建立缆索机器人项目进度计划及优化方案;2.建立缆索机器人运动模型,并确定控制精度的关键因素及控制策略;的能力;4.实现缆索机器人的进度控制和路径规划,并优化控制系统。
三、研究方法和流程3.1 研究方法1.文献资料调研法:对已有的缆索机器人控制系统和进度计划进行综合研究,查找相关文献资料,建立框架和模型。
2.仿真模拟法:通过对缆索机器人运动模型的建立,运用MATLAB和SolidWorks等相关软件进行模拟模型,验证控制策略和优化方案的有效性。
3.实验验证法:通过实际运用缆索机器人进度控制与路径规划系统进行实际测试,验证系统的实用性和稳定性。
3.2 研究流程1.收集、分析文献资料,确定研究对象和问题;2.建立缆索机器人运动模型,探究控制精度的关键因素及控制策略;3.研究缆索机器人自适应控制算法并进行优化,提高适应复杂环境的能力;4.实现缆索机器人的进度控制和路径规划,并优化控制系统;5.对系统进行测试和评估,完善控制系统。
国内外缆绳机器人的调研报告

国内外缆索机器人现状机器人是传统的机构学和近代电子技术相结合的产物,而缆索机器人(Cable-Climbing Robot,CCR)是一种能够携带相关设备攀爬缆索,并对其进行高空长距离检测维护特种机器人。
它的出现是近年来各学科技术的发展、人类对生产方式的不断探索和改进的必然产物。
这种自动化装备不但可以应用在斜拉桥缆索的检测、清洗、喷涂、彩装等领域,而且可以完成高压供电电缆和石化行业架空管道的探伤和表面处理,还可以应用于高空气象和环境检测、高架路路灯杆以及风景区索道、体育馆等其它建筑的缆索维护,具有广阔市场应用前景,能带来巨大经济效益和社会效益。
缆索机器人,与人工作业方式相比,不但极大地降低了成本,而且也最大限度地保证了作业安全。
所以,近些年国内、外很多科研单位都开展了缆索机器人的技术及理论研究工作,并且取得了一些实用成果。
但总的来说,该类机器人的研究还是处于初级阶段。
国内比较典型的有上海交通大学研制的斜拉桥缆索涂装维护机器人可在各种斜度的缆索上爬行,能完成缆索检测、清洗等工作,并具有一定的智能性。
研制成功了采用电动全驱动摩擦轮式、气动蠕动式两种机器人样机,并且在上海徐浦大桥和南浦大桥上进行了实验,目前处于国内领先地位。
实验样机如图1.1,图1.2 所示。
在国外与缆索爬升相类似的管外移动机器人、巡线机器人和灯杆检测清洗机器人等,相关专家都进行了大量研究,并且都研制成功了样机,但没有发现有关斜拉桥缆索机器人的报道。
纵观国内外各种爬升模型,机构依附于线约束表面的有直线连续爬升、夹紧蠕动爬升、螺旋攀援爬升和吸附爬升等自动方式。
以下是几种与缆索机器人类似的机器人,主要依附管状或者线缆爬行进行特种作业要求。
图1.3和图1.4是两种很典型的应用于灯杆检测清洗的机器人,都采用电驱动,但结构完全不同。
图3是美国维吉尼亚大学研制的应用于高速路灯杆无损检测的磁吸附式电驱动爬行机器人Polecat有六个驱动轮和两个从动轮,每一个轮子设计成中间加有磁铁的两个圆盘,通过协调磁铁吸力和电机驱动力就可以实现机器人的爬行运动。
浅析悬索桥主缆外观检测机器人研发
浅析悬索桥主缆外观检测机器人研发
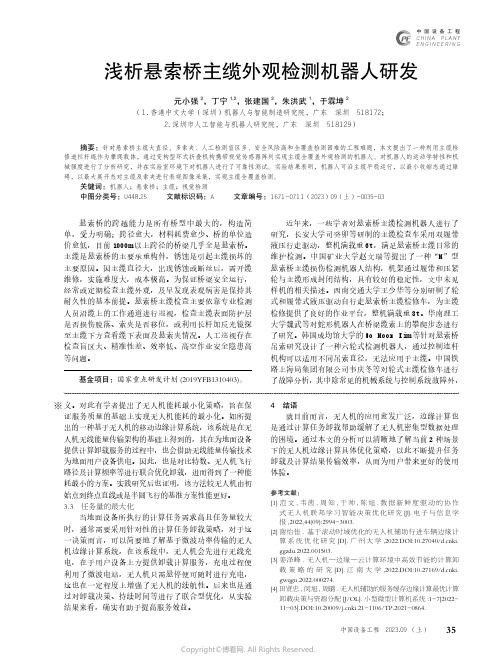
图1 主缆检测机器人组成及其工作场景
1.1 牵引部件
牵引部件是主缆检测机器人的动力源,其由四组自锁动力组件、预紧弹簧、调节杆、摆臂和机架构成。
自锁动力组件通过摆臂、预紧弹簧和机架连接,通过调节杆可以同步调节四组自锁动力组件的间距,进而可以适应悬索桥不同栏杆绳的间距并提供机器人前进的预紧压力。
自锁动力组件由电机、联轴器、蜗轮蜗杆减速机、同步带轮和车轮等组成。
此组件具有自锁功能,在机器人掉电状态下实现自锁,保证机器人不下滑,提供安全保障。
1.2 环形检测部件
环形检测部件由固定环、动环和驱动电机等组成。
36中国设备工程 2023.09 (上)
现代工程机械管理及维修保养浅析。
关于采用自夹紧模糊控制的缆索检测机器人设计
一摘要:针对斜缆索检测机器人爬升所需夹紧力的特点,设计一种带气动夹紧装置的缆索机器人,能根据缆索机器人自身重力与所攀爬的缆索状态进行夹紧力的自适应模糊控制。
气动夹紧机械臂能实时提供合适的夹紧力,在保证检测机器人获得足够摩擦力的同时避免由于夹紧力过大而对缆索造成二次损伤;同时,采用自夹紧技术的机器人,可以调节夹紧机构的气缸行程,实现同一个检测机器人检测各种不同直径和倾斜度的斜拉桥缆索。
自夹紧功能的实现对于缆索机器人的结构改进和保护缆索避免二次损伤,具有积极意义。
关键词:缆索检测机器人;预夹紧力;自夹紧模糊控制Design of Self-clamping Cable Rope Inspection Robot Based on Fuzzy Control QIN Li,CHENG Lianglan(Faculty of Automation,Guangdong University of Technology,Guangzhou Guangdong 5 10006,China) Abstract:In allusion to the clamping forces required of the cable rope inspection robot,a kind of inclined cable inspection robot with pneumatic clamping device was proposed,it could adjust the clam ping force according to its own weight and cable state.Pneu·matic clamping manipulator could real—time provide appropriate clam ping force,to guarantee the inspection robot to get enoughfriction and to avoid second injury to the cable.The cable rope inspection robot with self-clamping technology can be used to detect all sorts of cable with different diameter and gradient of cable-stayed bridge by adjusting the clam ping cylinder extent.The realization of self-clam—ping function call improve the structure of the robot and protect cable from secondary injury.Keywords:Cable inspection robot;Pre-clamping force;Fuzzy control on self-clamping function改革开放以来,斜拉索桥作为现代桥梁的新形式,在中国得到了广泛的应用,缆索作为斜拉桥的主要构件之一,造价占整座桥梁的25%一30%。
斜拉桥缆索检测机器人系统研究
斜拉桥缆索检测机器人系统研究文章介绍了斜拉桥缆索檢测机器人的结构组成。
斜拉桥缆索是斜拉桥至关重要的组成部分,其寿命决定了整个桥梁的使用寿命。
因此迫切需要定期对斜拉桥的拉索进行检测和维护。
而机器人检测法是进行斜拉桥检测的众多方法中最便捷、高效、经济的。
文章介绍的斜拉索机器人由机械结构、驱动部分、数据采集部分组成,将机械、电气、传感器融合在一起组成了一套全新的机电设备。
该设备具有操作简便、结构简单、故障率低、运行效率高等优点。
从而为斜拉桥缆索检测提供了一套完整可行的方法。
标签:斜拉桥缆索;机电一体;多传感器融合引言斜拉桥由于其采用拉索来代替梁式桥的支墩,因此其成为了大跨度桥梁的主要桥型。
斜拉桥主要由索塔、主梁、斜拉索组成。
拉索作为斜拉桥的主要承重构件,是斜拉桥的”生命线”,造价占整座桥梁的30%左右[1]。
定期针对拉索进行检测及维护工作对延长其服役寿命具有重要的意义。
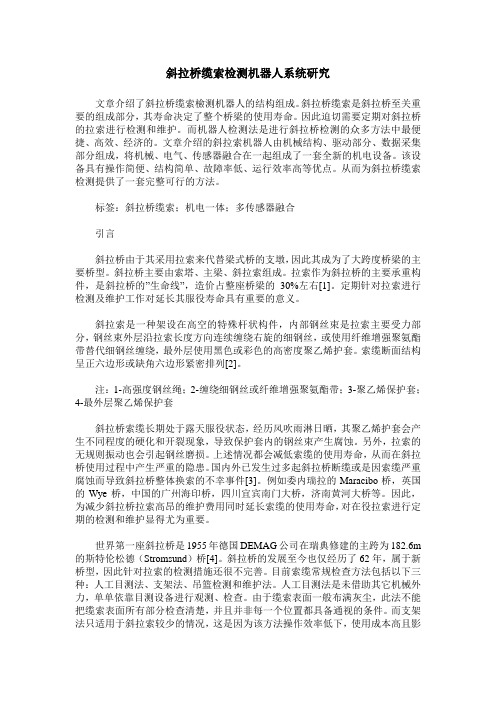
斜拉索是一种架设在高空的特殊杆状构件,内部钢丝束是拉索主要受力部分,钢丝束外层沿拉索长度方向连续缠绕右旋的细钢丝,或使用纤维增强聚氨酯带替代细钢丝缠绕,最外层使用黑色或彩色的高密度聚乙烯护套。
索缆断面结构呈正六边形或缺角六边形紧密排列[2]。
注:1-高强度钢丝绳;2-缠绕细钢丝或纤维增强聚氨酯带;3-聚乙烯保护套;4-最外层聚乙烯保护套斜拉桥索缆长期处于露天服役状态,经历风吹雨淋日晒,其聚乙烯护套会产生不同程度的硬化和开裂现象,导致保护套内的钢丝束产生腐蚀。
另外,拉索的无规则振动也会引起钢丝磨损。
上述情况都会减低索缆的使用寿命,从而在斜拉桥使用过程中产生严重的隐患。
国内外已发生过多起斜拉桥断缆或是因索缆严重腐蚀而导致斜拉桥整体换索的不幸事件[3]。
例如委内瑞拉的Maracibo桥,英国的Wye桥,中国的广州海印桥,四川宜宾南门大桥,济南黄河大桥等。
因此,为减少斜拉桥拉索高昂的维护费用同时延长索缆的使用寿命,对在役拉索进行定期的检测和维护显得尤为重要。
缆索起重机电气控制系统的改进方案

在 我 国大 型 水 电工 程 施 工 的过 程 中 ,经 常会
可 以进 行 牵 引 、起 升 、行 走 的操 控 。主 塔 可 以对 缆 索起 重 机 进行 牵 引 和起 升操 作 。具 体 控 制 系统
如图 1 所示 。
使用缆索起重机来对大坝进行浇筑 。不过使用传
统 的缆 机 控 制 系统 控 制起 来 非 常麻 烦 ,经 常会 出 现故 障 ,而 且 维修 起 来 也非 常 麻 烦 。 同时 ,在 对 机组 进 行 调 速 时 ,需 要 占用 大 量 的 资源 ,且 在 起 升 绳 弹跳 时 ,很 容 易 出现 断裂 的 情况 。本 文通 过 对 某 缆 索 起 重 机 的改 进 方
关键词 :缆索起重机 ;电气控制系统 ;改进方案
中图 分 类 号 :T H2 1 3 文献 标 识 码 :A 文章 编 号 : 1 0 0 9 —9 4 9 2( 2 0 1 3 ) 1 2—0 1 0 6—0 3
Ca b l e Cr a n e El e c t r i c Co n t r o l S y s t e m I mp r o v e me n t Pr o g r a m
t h e p r o d u c t i o n o f c a b l e c r a n e mo s t l y u s e l o g i c a l me c h a n i c a l a n d e l e c t r i c a l c i r c u i t a n d s p e e d c o n t r o l me t h o d t o c o n t r o l un i t . I n c o n s t uc r t i o n
p r o c e s s i s e a s y t o f a i l , a n d t a k e u p mo r e r e s o u r c e s . Ba s e d o n t h i s t h e p a p e r d i s c u s s e s t h e i mp r o v e me n t s c h e me o f c a b l e c r a n e e l e c t r i c
气动爬缆机器人设计理论分析
作环 境适应 性号 炮 ,不会 因环境 变化影 响传 动及控制性能 ,阻力损失和泄漏较小 , 不会污 染 环境 。 () 器人采 用 P C控制 ,可靠性高 ,改 3机 L 变程序 灵活 。 可进行 时间控制 , 行程控制和混 合控制 ,都可通过设 定 P C程序 来实现 。可 L 根据 机械 手的动作 来修 改程 序 ,是爬缆 机器 使 机械 手可 以在缆索 上 可靠的 夹紧 。在主 体 人通 用性 更强 。 上 共分 两层布 置六 只夹 紧气缸 。导 向机构 由 三只与 夹紧 气缸平 行的带导 柱 气缸组 成 ,导 参考文献 向气缸 分别驱 动导 向轮使 机械手 在缆索 上定 【】姜佩东 . l 液压与 气动技术 . 北京 : 高等教育 心, 并分 别随 主体在缆索上移动 。 移动 机构由 出版社 ,2 0 . 0 0 两只移 动气缸 实现移 动功 能 ,气缸 上部分 的 【】徐元 昌. 2 工业机 器人 . 京 : 北 中国轻工业出 活塞杆端 头 通过螺 纹与 上体连接 ,缸体 的底 版 社 ,l 9 . 9 8 度 ,则第 H艮 缆索 长度 ,倾 斜角 ,a 、斜度 部连于下体 。 【】何存兴 , 3 张铁华 . 液压转 动与气压转 动 . 华 根据 机 器人的 整体结 构 ,结 合 气压 传动 阻力 F分 别为 中科技大学 出版社 , 20 . 00 下式 中 : 为 动力导线单 位重量 , 为 的特 点 ,考 虑将机 器人 的的 气压传 动系统分 移 单个拉环重量 ,△ l为设置拉环 间距 , 表示 成三个回路单元 :夹紧回路、导 向回路 、 动 【】 回路 。气动 系统包括气动 阀和汽缸 等。气动阀 取整数值 。 包括电子换 向阀、减压 阀、节 流阀 、安全 阀。 ‘ ( 1, (一J1 : √ , 一 ) ( ,) J + , + + 气源由空气压缩 机 ,经分 水过 滤器 ,调压 阀、 q: — 1i)s (+一 】 t K +一)/ , 】,) g b( I 油雾器、气管进入各汽缸以控制 的动作 。 动 移 气缸 采用低摩擦缸 , 夹紧 气缸选 用薄行缸。单 F = 娟 g1 g l| 1n : I, s n c li 向节流 阀控 制各 气缸 排 气调速 ,使 各气缸 保 爬缆 机 器人的 力学 参数分 别有 上下 自重 持 同步 动作 ,导 向缸 的 进气 回路 中设 有减 压 和负载重 , 移动缸 、夹紧缸 , 向缸的 工作压 导 阀以调 节其 所需压 力 。移 动 气缸装 有安全 阀 力、内径及 活塞杆直径 , 移动气缸 活塞产生的 保 护气缸 。 推力 ,推 力反作用 力 、缆索 对机械 手的 支持 机 器人 工作流程 。选 择上 升状 态 ,机 器 力, 器人 爬升时导 向轮的总摩 擦力。当上下 机 人将完 成以 下动作 :上 夹紧控 制 电磁 阀得 到 体夹紧 气缸 夹紧或 松开时 ,为使爬 缆机 器人 信号 ,上夹 紧气缸 松开 ,伸缩 控制 电磁 阀得 保持 平衡 , 三个夹紧爪 同时 夹紧缆索 , 由夹紧 到信号 ,伸缩 气缸 伸长 ,上夹 紧控制 电磁 阀 气缸活 塞杆 的推 力产生 的与缆索 表 面间 的摩 得到信号 ,上夹 紧气缸夹 紧 ,下夹 紧控制 电 擦 力 应大 干沿 缆 索轴 线的 下滑 力。 磁 阀得 到信号 ,下夹紧 气缸松 开 ,伸缩控制 爬缆 机 械手 上 行 条件 :当 上体 上 升时 , 电磁 阀得到信 号 ,伸缩 气缸缩 回 ,下夹紧控 2 个移 动气缸活 塞杆 的推力之和应大干爬缆 机 制 电磁 阀得 到信号 ,下 夹紧 气缸 夹 紧 ,然后 械手上体 向上移 动的阻 力。 循 环 以上 步骤 即可 实现 机 器人 的上 升 爬行 。 此时移 动缸 受到 向下 的推 力 ,应使 下体 当选 择 下 降 状 态时 ,机 器人 将 完 成 以 下动 夹紧爪 与缆索 产生的 摩擦 力应该 大 干移动 气 作 :下夹 紧控 制 电磁 阀得 到信号 ,下夹紧 气 缸 向下的 推 力与下体 自重 、负载重 之和 。当 缸 松开 ,伸缩控 制 电磁 阀得 到信 号 ,伸缩 气 下体 上升时 ,2个移 动气缸 活塞 刚 的拉 力之
外国科学家就“缆索机器人”的研究动态

相关链接(一)我国机器人电缆市场研发与应用现状岳欢全球机器人市场规模不断扩大,我国机器人产业 发展势头迅猛,国产自主品牌工业机器人占我国市场 份额也大大提升,未来机器人需求潜力巨大,目前是机 器人产业蓬勃发展的关键机遇期。
新兴的机器人消费 市场囊括了机器人系统采购、系统硬件支持、软件支 持、机器人相关服务以及后期硬件维护等13个关键行 业和52个细分市场。
在机器人的应用中,越来越多的 复杂运动需要使用到可扭转或三维高柔性电缆,并且 要求这些电缆可以拥有与使用于直线拖链系统中时相 似的使用寿命。
芯线、束绞、屏蔽和护套材料必须要能 承受弯曲时产生的挤压力以及由扭转运动产生的径向 压力的变化。
为此,不同“软”结构元件,如黏胶纤维、P T F E元件或其他装填元件等都被用于高柔性机器人 电缆中,以吸收扭转力。
扭转电缆对编织屏蔽提出了 特殊要求。
由于使用了特殊的P T F E滑动膜,屏蔽结相关链接(二)构已经过了扭转优化,可一定程度上的补偿运动误差。
特别是对可扭转总线电缆来说,在产品的整个使用过 程中,传输特性参数如衰减,电缆载荷和信号质量都必 须保持在偏差极小的正常数值范围内。
这就要依靠经 过特殊扭转优化的绝缘材料和具有相应数值的衰减元 件来实现。
2017年6月举行的广州国际电线电缆及 附件展览会上,就有多种机器人电缆弯曲试验机、柔性 电缆拖链弯折试验机以及其他热门电线电缆检测仪器 公开亮相,这些产品应用于检测机器人电缆、柔性电 缆、耐弯折柔性电缆、拖链电缆、拖链弯折、高柔性电缆 的 复 实 等 。
近年有关机器人电缆技术方面的相关研究论文大 致如下:夏知2015年在《光纤与电缆及其应用技术》上发 表了《新型工业机器人用电缆的结构设计》;等。
外国科学家就“缆索机器人”的研究动态吕缆索机器人(Cable- Climbing Robot,C C R)是一■种能够携带相关设备攀爬缆索并对其进行高空长距离检 测维护的特种机器人。
气动机器人的系统设计及应用研究
气动机器人的系统设计及应用研究随着机器人技术的不断发展和应用范围的不断拓宽,以气动为驱动的气动机器人也逐渐受到人们的重视和关注。
气动机器人具有结构简单、运动稳定、精度高等优点,广泛应用于生产线上的装配、喷涂、搬运等领域。
本文将从气动机器人的系统设计和应用研究方面进行介绍和探讨。
一、气动机器人的系统设计气动机器人的系统设计是气动机器人研究中至关重要的一环。
一个优良的气动机器人系统设计,可以使气动机器人具有更为优异的使用效果和运行性能。
气动机器人的系统设计需要考虑以下因素:设计目标:气动机器人的设计目标包括工作负载、速度、精度等多方面指标。
设计目标的设定需要在使用环境和任务需求等多种因素的综合考虑下,制定合理的目标方案。
传动系统:气动机器人的传动系统通常采用气压驱动,利用压缩空气做为动力源,推动气缸和气动执行器完成机器人的运动任务。
传动系统的设计需要满足控制系统的要求和机器人的运动特性。
控制系统:控制系统是气动机器人的核心部分,需要根据机器人的运动特性和任务要求,设计出相应的控制算法和控制逻辑。
同时,还需要考虑控制系统的稳定性、实时性等多方面要素。
气路系统:气路系统是气动机器人的基础部分,包括气压产生、控制和传输等方面。
气路系统的设计需要满足机器人的需求和气动元件的特性,同时还需要注重气路系统的能效优化和噪声控制。
机械结构:气动机器人的机械结构需要根据机器人的任务要求,设计出可行的机械结构方案。
机械结构的设计需要注重机械刚度、质量和可靠性等因素。
二、气动机器人的应用研究气动机器人的应用涉及多个领域和行业,主要应用于生产线上的装配、喷涂、搬运等各个环节。
以下是气动机器人应用研究中的几个重要领域:汽车工业:气动机器人在汽车工业应用广泛,可以完成车身焊接、零件搬运和喷涂等工作。
在汽车制造的生产线上,气动机器人可以对车身进行高精度的焊缝定位和加工,提高工作效率和生产质量。
电子制造:气动机器人在电子制造领域也有广泛的应用,可以完成电子元件的装配和焊接等任务。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
液压与 气动
20 0 7年第 1 期 1
缆 索维 护机 器 人 气 动 系统 设 计 研 究
李建永 , 李荣丽 , 生元 , 姜 刘小 勇 , 焦宏章
De i n a d Re e r h o e s g n s a c f Pn uma i y t m o b e M i t n n e Ro o t S s e f r Ca l a n e a c b t c
LI in y n a — o g,L n —i I J IRo gl,JANG S e g y a , U Xio y n ,J AO Ho g z a g h n — u n LI a — o g I n —h n
( 北华大学 机械工程学 院, 吉林 吉林
1 22 ) 30 1
等特 点 , 用得 比较广 泛 。因此 , 课题 组采 用 了气 动 应 本
本体控 制 系 统 蓄 电 池
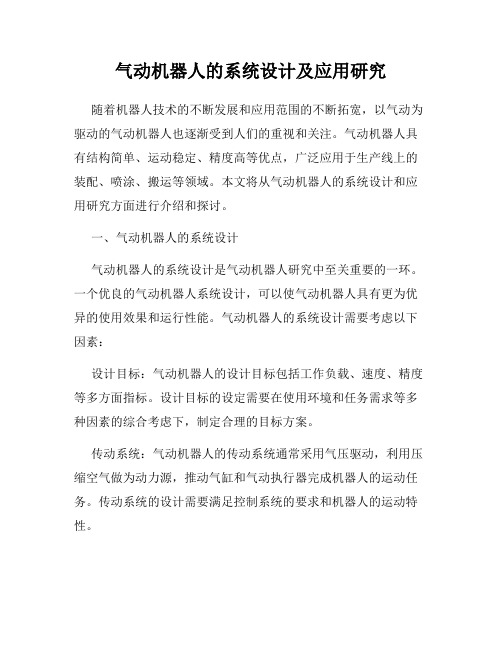
图 1 缆 索维 护 机器 人 结构 组 成 原 理 简 图
驱动技 术 , 构建 了缆索维 护 机器人 系统 , 并在 机器人 安
全控 制策 略上提 出 了新 思 想 , 为机 器 人 技 术应 用 于 桥
下
储 气 罐
实用成果I 。缆索维护机器人按驱动形式 可分为 电 4 j
机连续 轮 式 驱 动 、 动蠕 动 式 、 压 驱 动 等I 。其 中 气 液 5 j 由于气 动蠕 动式驱 动 方 式具 有 介 质 清 洁 、 紧力 具 有 夹 缓 冲性 、 载 自适 应性 、 负 气动 系统 简单及 控制 比较方 便
源 。通 过 P C的协 调控 制 , 拟爬 虫 的蠕 动式 间歇 运 L 模
斜拉桥缆索倾斜度大、 距离长 , 由自重及外界 自然 条件影响使缆索具有一定的挠度 。因此 , 将机器人本 体设计成上体与下体两部分 , 上下体均由支撑板 、 夹紧
装 置和 导 向装 置组 成 ( 图 1 示 ) 如 所 。采用 的平 行式 自 动对 中夹紧装 置结构 简单 、 紧力 大 , 夹 可适 应不 同直径
中图分类 号 : H187. B 10 .882 0 )10 6.4
0 引 言
导 向轴及 移动气 缸 连 成 一体 , 成机 器 人本 体 。机器 构
人 的运动控 制 是 通 过 P C按 照一 定 的逻 辑 分 别控 制 L
拉桥主要承重构件的缆索, 由于其长期暴露在空气中, 经过风吹雨打不可避免会 出现腐蚀现象 , 因此对其定 期 进行 检测 、 洗 、 损 探 伤 和 涂 装 尤 为重 要 I 。 由 清 无 2 j
于传 统 的 维 护 方 式 不 仅 工 作 效 率 低 l 、 且 危 险 性 3 而 j 大, 因此缆索 维护 需要 智 能 化 的装 备 。从 世 界 的范 围 看 , 索维护 机器人 的研 究还 处于起 步 阶段 , 内的上 缆 国 海交通 大学率 先进 行 了这 方 面 的研 究 , 并取 得 了一 些
的分解 : 下体 夹 紧气缸夹 紧 , 体夹 紧气 缸松 开 , ① 上 经
气动 系统 原理 图如 图 3 示 。 所 整个 气动系 统 主要完 成夹 紧 、 动 、 涂及 安 全保 移 喷
匿¨¨ 体
6 5
过一段 延 时 , 上体 夹 紧气缸 收 回到气 缸体 末端后 , 出 发
随着 我 国交 通 事业 的迅 速 发展 , 斜拉 桥 作 为 一 种
美观 实 用 的 桥 型越 来 越 受 到人 们 的青 睐l 。作 为 斜 1 j
气 动系统 的 电磁 阀 , 而 控 制移 动气 缸 、 紧 气缸 、 从 夹 喷 涂摆 动 电机按 照预 定规律 运 动实现 。 当地面气 源或导 气 管突然 出现 故 障而 无法 正 常 供 气 时 , 气 罐 作 为备 储 用 能源使 机器 人安 全返 回。
1 2 机 器人动作 原理 .
缆索维护机器人是以斜拉桥缆索的防腐喷涂为 目
标 所设计 的 , 采用 了全 气 动驱 动 方 式 。本 气 动 系统 由
梁维 护领域 奠定 基础 。
1 机器 人的本体 结构 及工 作原理 1 1 机 器人本 体结 构 .
2 个移动气缸 、 2个夹紧气缸 作为机器人移动 的动力
动方式。缆索维护机器人上升过程动作节拍如 图 2 所
示, 由气缸驱动上下体 的夹紧和移动 。 初始状态上下
收稿 日期 :0 70 .6 2 0 .80
基金项 目: 吉林省教育厅资助项 目(04 4 ) 20 — 6
作 者简介 : 李建永 (9 1 )男 , 17 一 , 辽宁沈 阳人 , 工程师 , 主要研
护 4 分工作 。由地 面泵 站 获得 气 源 , 气动 三 联件 , 部 经 得 到清洁 、 的 空气 , 手 动换 向阀后 气 源分 3 来 干燥 经 路 分别完 成气动 系统 的 4部 分工 作 : 始 状 态 、 器人 上 初 机 升循环 、 机器 人 下 降循 环 、 业 ; 作 通过 主从 二级 P C控 L 制 系统 控制各 电气 元件 动作 顺 序实 现 的机器 人 的蠕 动 式上升 和下 降 , 器 人 的各 元 件 动 作 真值 表 如表 1所 机 惝 奉
摘
要: 以斜拉 桥 缆 索的防 腐喷涂 为 目标 , 制一种 全 气动驱 动 的缆 索维护机 器人 。提 出了气动 系统 的 研
设计 方案 , 并对 气动 系统 的参 数进 行 了计算 , 室 内实验 验证 了该 气动 系统 工作 可靠 、 能稳 定 , 经 性 对环境 的适
应 能力强 , 并在 高空作 业 出现 故 障时可 安全 回收 。 关 键词 : 索维护 ; 器人 ; 缆 机 气动 系统
的缆索。采用的变刚度弹性导向机构 , 可使机器人在 运动过程中能够保持 良好的对 中性能。上下体之间由
究方 向: 液压与气动技术 、 电系统控制技术 。 机
维普资讯
20 0 7年 第 l 期 l
液 压 与 气动
体夹 紧气缸 都夹 紧 , 向上 爬 升 时气 缸动 作 1 周 期 其 个