基于C51单片机的蓝牙远程智能扫雷机器人设计
基于51单片机的多功能蓝牙循迹避障测距小车(优.选)
基于51单片机的多功能蓝牙循迹避障测距小车的设计与制作摘要:无线遥控的机器人小车在危险环境作业、人员搜集等应用中可发挥特殊的作用。
本次设计选择基于蓝牙遥控的多功能智能小车为对象。
设计了该系统的硬件电路原理图,控制系统以STC89C52单片机为主控芯片,采用BTS7970为电机驱动芯片、蓝牙无线串口模块、红外光电传感器模块、舵机模块、超声波发射与接收模块等构成外围扩展电路。
将自制的控制电路、控制程序和四轮小车机械结构相结合,制作多功能机器人小车。
实验调试实现了智能小车的蓝牙无线遥控、自动避障、自动循迹、自动三向测距等功能。
关键词:单片机;蓝牙遥控;舵机;光电传感器目录第一章前言 (3)第二章方案比较与论证 (3)2.1总体方案设计 (3)2.2无线模块设计 (4)2.3显示模块设计 (4)2.4循迹模块设计 (5)2.5避障模块设计 (5)第三章智能车机结构分析 (5)第四章控制系统电路设计 (6)4.1 MCU的选型 (6)4.2 电机驱动电路设计 (6)4.3 红外传感器模块设计 (7)4.4 蓝牙模块设计 (7)4.5 舵机模块设计 (7)4.6 超声波模块设计 (8)4.7 电源电路设计 (8)第五章调试结果分析 (8)5.1 各模块功能调试 (8)5.2 总结 (9)致谢 (10)参考文献 (11)附录部分程序 (12)第一章前言随着汽车工业的迅速发展,关于汽车的研究也就越来越受人关注。
遥控小车起源于美国,由于政府对无线遥控小车研发的资助以及相关资助的推动作用,日本、美国、德国等工业大国在遥控小车技术上占据着明显优势。
我国的无线遥控小车研究工作始于20世纪中后期,在国家的863、973等技术发展计划的重点支持下,国内已大范围地进行无线遥控小车的研究。
全国电子大赛和省内电子大赛几乎每次都有智能小车这方面的题目,全国各高校也都很重视该题目的研究,但是与国际先进还存在一定的差距。
可见其研究意义很大。
基于C51单片机擂台机器人的设计
2.4 模数转化芯片 ADC0809
ADDA、ADDB、ADDC:3 位地址输入线,用于 选通 8 路模拟输入中的一路。
ALE:地址锁存允许信号,输入,高电平有效。 START:A/D 转换启动信号,输入,高电平有 效。 EOC:A/D 转换结束信号,输出,当 A/D 转 换结束时,此端输出一个高电平(转换期间一直为低 电平)。 OE:数据输出允许信号,输入,高电平有效。当 A/D 转换结束时,此端输入一个高电平,才能打开 输出三态门,输出数字量。 CLK:时钟脉冲输入端。要求时钟频率不高于 640KHZ。
238
4 红外隐身外壳设计
5 结束语
本文设计的是基于 c51 单片机的擂台 基 机器人,趣味性强,能提升大学生的创新设 于
C51
计能力、综合设计能力和团队合作精神,培
养大学生根据实际需求进行创新思维、机械
单 片
设计和工艺制作等实际工作能力,并以此为
机 擂
契机促进大学生课外科技创新活动的蓬勃
台 机
开展。
是 SGS 公司的产品,内部包含 4 通道逻辑驱动电 路。是一种二相和四相电机的专用驱动器,即内含 二个 H 桥的高电压大电流双全桥式驱动器,接收标 准 TTL 逻辑电平信号,可驱动 46V、2A 以下的电 机。
要注意的是,L298N 驱动的 5V 端口可以直接 对单片机供电。
模块接口说明: +5V:芯片电压 5V。 VCC:电机电压,最大可接 50V。 GND:共地接法。 A-~D-:输出端,接电机。 A~D+ : 为 步 进 电 机 公 共 端 , 模 块 上 接 了 VCC。 EN1、EN2:高电平有效,EN1、EN2 分别为 IN1 和 IN2、IN3 和 IN4 的使能端。 IN1~ IN4:输入端,输入端电平和输出端电平是 对应的。 3 软件设计 系统整体流程图如图七所示。
基于C51单片机智能机器人触觉导航系统设计
基于C51单片机智能机器人触觉导航系统设计雷道仲【摘要】The tactile sensor has been widely used in intelligent toys and robot navigation.According to this characteristic of the tactile sensor, the author puted forward a solution for a intelligent robot navigation,including detailed introduction about navigation system,and design scheme boththe hardware circuit and software.It has been proved by tests that the Artificial decision method could help the roobt to get away from this situation after it went into a 90 degree corner.%触觉传感器在智能玩具和机器人导航方面有着广泛的应用,作者根据触觉传感器的这一特性设计出一款智能机器人导航电路,详细介绍了导航系统设计方案、硬件电路的组成以及软件的编程思路;并通过测试,提出了机器人进入90度墙角之后的人工决策办法,可以使机器人顺利地从墙角死区退出。
【期刊名称】《电子测试》【年(卷),期】2015(000)008【总页数】4页(P1-3,15)【关键词】传感器;机器人;触须;导航【作者】雷道仲【作者单位】湖南信息职业技术学院,湖南长沙,410200【正文语种】中文【中图分类】TN919.51 触须传感器机完成机器人导航功能,直流伺服电机是机器人的行走系统,完成各种行走动作。
触觉传感器工作原理非常简单,其的等效电路原理图如图2中虚线所示[2]。
一种轻小型智能扫雷机器人的设计与实现

关键词 : 扫 雷机 器人 ; 图像 识 别 ; 滑模控制 ; 柔性 传动
D OI : 1 0 . 1 1 9 0 7 / r j d k . 1 6 2 7 7 6
中 图分 类 号 : TP 3 1 9
文献 标 识 码 : A
文章 编 号 : l 6 7 2 — 7 8 0 0 ( 2 0 1 7 ) 0 0 3 — 0 0 6 2 — 0 3
( 海军 工程 大学 电子 工程 学院 , 湖北 武 汉 4 3 0 0 3 3 )
摘 要 : 针对传统扫雷方式的弊端 , 结合智能水 下机 器人 的发展趋 势, 设计 了一款具有遥控 和 自主双模 式操 作的轻小
型 扫 雷 机 器 人 。能 通 过 双 视 频摄 像 头 对 小 范 围的 目标 进 行 精 准 定 位 , 机 械 手 自动 或 手 动 遥 控 完 成排 雷 . 工作期 间 实 时捕 捉 水 下 画面 , 记 录机 器人 的运 动 轨 迹 。 系统 以 S T C1 5单 片 机 为 核 心 , 由动 力 系统 、 图像 采 集 处 理 系统 、 控 制 系统 及 辅 助 系统 四 大部 分 组 成 , 采 用 了图像 识 别 、 滑模 控 制 及 柔 性 传 动 等 关 键 技 术 系统 设 计 合 理 , 功 能 完善 , 相 关技 术 可在 水 下机 器人 中推 广使 用 。
ROV 动 力 充 足 、 _ [ 作快捷 方便 、 数 据采集 量大 , 但 由 于 机 身 白带线 缆 , 不适 合 长 距 离 水 下 作 业 。AUV 不 受 电 缆 限 制、 活动范围大 、 机 动性 好 、 安全智能 、 隐蔽 性 好 , 但 远 程 续
航能力不足 , 人机 交 互 水 平 和 总 体 决 策 能 力 不 高 , 因 此 各 国都 在 研 究 如 何 将 ROV 和 AUV 有 效 结 合 , 最 大 限 度 地
基于51单片机类人机器人智能巡线的设计与实现

基于51单片机类人机器人智能巡线的设计与实现一、引言随着科技的不断发展,机器人逐渐成为了人们生活中重要的一部分。
类人机器人作为其中的一种,能够模拟人类的行走和动作,能够执行一些特定的操作任务。
在实际应用中,类人机器人需要具备智能巡线的功能,以能够根据环境变化实时调整行走方向。
合理的设计与实现类人机器人智能巡线功能对于提高机器人的实际应用效果至关重要。
本文基于51单片机,介绍了一种基于光电传感器的类人机器人智能巡线设计与实现的方案。
二、设计原理1.光电传感器光电传感器是智能巡线的核心部件,能够接收外界光线的变化,将其转化为电信号并输出给单片机进行处理。
为了使机器人能够智能巡线,需要在机器人两侧各安装一个光电传感器来感知地面的黑线。
2.单片机控制3.电机驱动机器人的行走由两个电机驱动,通过控制电机的转动方向和转速来改变机器人的行进方向和速度。
可通过PWM技术来控制电机的速度,通过H 桥电路来控制电机的转向。
三、设计步骤1.硬件设计根据机器人的设计要求,确定机器人的形状和电路配置。
将两个光电传感器连接到单片机的IO口上,通过IO口读取光电传感器输出的电信号。
利用H桥电路控制电机的转向,通过PWM信号控制电机的速度。
2.软件设计在51单片机的开发环境下编写巡线控制程序。
主要包括读取光电传感器的电信号、判断传感器的状态、根据判断结果控制电机的转向和转速等功能。
程序流程如下:-初始化各个IO口和定时器-循环读取光电传感器的输出电信号-根据光电传感器输出的电信号判断传感器的状态-根据传感器状态控制电机的转向和转速-在循环中不断更新电机的状态,实现智能巡线四、实施与测试根据设计步骤进行硬件搭建和软件编程后,进行实际测试。
将机器人放置在黑线上,开启电源,观察机器人行走情况。
当机器人移动到黑线外时,根据光电传感器感知到的情况,及时进行调整,使机器人重新回到黑线上行走。
在测试过程中,可以根据实际情况进行一些参数的调整,如阈值的设置,紧急停止机制的优化等。
基于C51单片机设计的机器人

学生姓名:学号:班级:ቤተ መጻሕፍቲ ባይዱ
答辩地点:J523实验室
答辩内容记录:
答辩成绩
合计
分值
各项分值
评分标准
实际得分
合计得分
备注
25
10
在规定时间内能就所设计的内容进行阐述,言简意明,重点突出,论点正确,条理清晰。
15
在规定时间内能准确、完整、流利地回答教师所提出的问题。
答辩小组成员(签字):
年月日
成绩评定表
2、学生成绩由指导教师根据学生的设计情况给出各项分值及总评成绩。
3、指导教师评语一栏由指导教师就学生在整个设计期间的平时表现、设计完成情况、报告的质量及答辩情况,给出客观、全面的评价。
4、所有学生必须参加综合设计的答辩环节,凡不参加答辩者,其成绩一律按不及格处理。答辩小组成员应由2人及以上教师组成。
Keywords:Embedded systems;AT89C51; Sensor; The ring car
摘
嵌入式系统装置一般都由嵌入式计算机系统和执行装置组成,执行装置也称为被控对象,它可以接受嵌入式计算机系统发出的控制命令,执行所规定的操作或任务。执行装置可以很简单,如小车上的一个小型的电机,当接收到某种信号时启动电机。基于AT89C51芯片的单片机与多种传感器和舵机的组合设计成的擂台小车就是一个嵌入式系统,通过传感器检测到的数据来做出判断,以执行各种命令,实现擂台格斗的功能。传感器是一种将非电量转换为电量信号的检测装置,灵活的运用它,可以赋予小车感知能力。
3.应用C语言的各种知识;
4.学习编程技术和技巧
条件:
每人一套“C51+AVR版两轮教育机器人套件“
任务:
设计擂台机器人,在规定的场地内活动,搜索对手,找到对手,并将对手推出场地。
基于C51单片机的智能灭火机器人的设计与研究

感器 同时 出现检 测 障碍物 信号 ,则机 器人 先执 行后 退机 动 ,再执行 原地 旋转 1 0 动作 ;若 左 、右传感 8。 器其 中一 个检 测到 障碍物 ,则相应 的执 行右 转和 左
转机动 。
2机 器 人 系统 设计
21 制 系统 .控
只有 在主 传感 器检 测 到火源 时 ,机器 人机动 停车 ,
水 泵 模 块 开 启 执 行 喷 水 动 作 ; 若 副 机 L 司5 系 列 内核 单 片机 非 常适 合做 T E公 1
嵌 入 式 控 制 系 统 的 芯 片 , 因 此 ,微 型 机 器 人 的 控 制
( :如果 需要消 除可见光对 传感器 的影响 ,可 注
以在传感器 电路 中增加热缩管解决 问题 ) 红外避 障传感器 微 型 机 器 人 采 用 市面 上 常 用 的红 外 避 障 传 感 器 :E 8 D O K 1 一 8 N ,它 是 一 种 红 外 线 反 射 式 接 近 开
图 1 机 器 人 结 构
1机 器 人原 理 介 绍
机 器 人可 以 自动 检测火 源和 探测 障碍物 ,并执 行相 应动 作 。机 器人 电机 驱动模 块处 于机 动状 态 , 远红 外火 焰传 感器模 块和 避 障传感器 模块 处于 实 时 扫描监控状态 ,水泵驱动模块处于待命状态 。
■ 者:娜本年,防技防器师要方自制传研 作介丽女8生任科院仪讲主究为控及器。 简程校1出现灾学Z0,研向动以感究 中,科务项资编灾系 央基研费资助号20 高,业专金( Y1 9 3 :1) 04 1
c51单片机应用与c语言程序设计(第4版) ——基于机器人工程对象的项目实践

c51单片机应用与c语言程序设计(第4版) ——基于
机器人工程对象的项目实践
《C51单片机应用与C语言程序设计(第4版):基于机器人工程对象的项目实践》是一本介绍C51单片机应用与C语言程序设计的教材。
该教材以机器人工程对象为载体,通过一系列的项目实践,帮助读者掌握C51单片机的应用和C语言程序设计。
以下是该教材的主要内容:
1. C51单片机的基本概念和硬件结构。
2. C语言程序设计的基本语法和程序结构。
3. C51单片机的各种功能模块,如I/O口、定时器、中断、串口等。
4. 机器人的移动控制、传感器检测、语音识别等方面的应用。
5. 基于机器人的综合项目实践,包括机器人的运动控制、传感器检测、语音识别等功能。
该教材的特点是注重实践和应用,通过机器人工程对象将C51单片机和C 语言程序设计的知识点串联起来,让读者在实践中掌握知识和技能。
此外,该教材还提供了丰富的代码实例和项目案例,方便读者学习和参考。
如果你想学习C51单片机应用和C语言程序设计,同时又对机器人技术感兴趣,那么《C51单片机应用与C语言程序设计(第4版):基于机器人工程对象的项目实践》是一本值得推荐的教材。
基于51单片机的多功能蓝牙循迹避障测距小车

基于51单片机的多功能蓝牙循迹避障测距小车的设计与制作摘要:无线遥控的机器人小车在危险环境作业、人员搜集等应用中可发挥特殊的作用。
本次设计选择基于蓝牙遥控的多功能智能小车为对象。
设计了该系统的硬件电路原理图,控制系统以STC89C52单片机为主控芯片,采用BTS7970为电机驱动芯片、蓝牙无线串口模块、红外光电传感器模块、舵机模块、超声波发射与接收模块等构成外围扩展电路。
将自制的控制电路、控制程序和四轮小车机械结构相结合,制作多功能机器人小车。
实验调试实现了智能小车的蓝牙无线遥控、自动避障、自动循迹、自动三向测距等功能。
关键词:单片机;蓝牙遥控;舵机;光电传感器目录第一章前言 (3)第二章方案比较与论证 (3)2.1总体方案设计 (3)2.2无线模块设计 (4)2.3显示模块设计 (4)2.4循迹模块设计 (5)2.5避障模块设计 (5)第三章智能车机结构分析 (5)第四章控制系统电路设计 (6)4.1 MCU的选型 (6)4.2 电机驱动电路设计 (6)4.3 红外传感器模块设计 (7)4.4 蓝牙模块设计 (7)4.5 舵机模块设计 (7)4.6 超声波模块设计 (8)4.7 电源电路设计 (8)第五章调试结果分析 (8)5.1 各模块功能调试 (8)5.2 总结 (9)致谢 (10)参考文献 (11)附录部分程序 (12)第一章前言随着汽车工业的迅速发展,关于汽车的研究也就越来越受人关注。
遥控小车起源于美国,由于政府对无线遥控小车研发的资助以及相关资助的推动作用,日本、美国、德国等工业大国在遥控小车技术上占据着明显优势。
我国的无线遥控小车研究工作始于20世纪中后期,在国家的863、973等技术发展计划的重点支持下,国内已大范围地进行无线遥控小车的研究。
全国电子大赛和省内电子大赛几乎每次都有智能小车这方面的题目,全国各高校也都很重视该题目的研究,但是与国际先进还存在一定的差距。
可见其研究意义很大。
基于51单片机的蓝牙遥控小车

基于单片机的智能避障遥控小车目录第一章绪论 (1)1.1 研究背景和意义 (1)第二章系统框架及软硬件结构设计 (2)2.1 系统要求 (2)2.2 系统整体算法流程 (2)2.3 总体任务设计 (3)2.4 整体硬件结构设计 (4)2.5 整体软件结构设计 (4)第三章模块的详细设计 (5)3.1 L293D电机驱动模块 (5)3.1.1模块介绍 (5)3.1.2 PWM脉冲控制原理 (5)3.1.3 脉冲控制代码 (6)3.2 HC05蓝牙模块 (7)3.2.1 模块简介 (7)3.2.2 蓝牙串口程序说明 (7)3.2.3 模块引脚说明 (8)3.3 USB转TTL模块 (9)第四章系统功能设计与实现 (10)4.1 安卓手机蓝牙遥控的设计与实现 (10)4.1.1 设计基本思路 (10)4.1.2 遥控任务分配 (10)4.2.3 蓝牙遥控操作流程 (11)第五章软硬件调试 (13)5.1 硬件调试 (13)5.2 软件调试 (13)第一章绪论1.1 研究背景和意义智能化无处不在。
各种智能化设备在不同的领域中发挥着自己的特长,而在家用方面的智能有着相当重要的意义。
本次所设计的智能小车系统包含着对周围环境的检测、舵机控制以及短距离无线遥控等的功能,它需要实现微控制器、多传感器技术、蓝牙遥控、机械结构原理、数字逻辑、自动控制等各学科技术内容的渗透融合。
智能小车通过其上部搭载的89C52芯片作为核心控制器,通过多种传感器来获取周围环境信息并将采集到的信息输送给CPU,然后由CPU来给各个部分下达相对应的指令。
智能小车不仅价格低廉,而且甚至能够担任人类难以从事的任务,它在工业、农业以及社会生产生活等许多领域都起到了重要作用。
本次课题设计中所采用到的短距离无线遥控、单片机控制原理、多传感器技术、自动避障技术等等。
现在在工业制造、农业生产、国家安全、军事武器,医疗保健、太空探测等许多领域都日益发挥着其作用,在军事侦察、反恐、防暴、防核化等高危任务方面、环境污染检测方面和在恶劣环境中均有着非常好的发展前景,从这些方面可知本课题研究意义非凡。
《单片机C51项目设计与开发》电子教案 项目6 机器人的控制和制作

• 2. L293D芯片 • (1)概述 • L293D是一款单片集成的高电压、高电流、4通道电动机驱动,设计
用于连接标准DTL或TTL逻辑电平,驱动电感负载(诸如继电线圈、 DC和步进电动机)和开关功率晶体管等。为了简化为双桥,L293D每 个通道都配备了一个使能输入端。L293D逻辑电路具有独立的供电输 入,可在更低的电压下工作。此外,L293D还内置了箱位二极管。 L293D适用于频率达5 kHz的开关。 • (2)特性 • ①L293D每个通道的电流输出能力达600 mA ; • ② L293D每个通道的峰值输出电流达1.2 A(非重复); • ③便于使能; • ④L293D具有过温保护作用;
上一页 下一页 返回
任务1 追光机器人的设计与制作
• ②单极性工作制。单极性工作制是单片机控制口一端置低电平,另一 端输出PWM信号,两口的输出切换和对PWM的占空比调节决定电动 机的转向和转速。
• 2. PWM调脉宽方式 • 调脉宽的方式有三种:定频调宽、定宽调频和调宽调频。我们采用了
上一页 下一页 返回
任务1 追光机器人的设计与制作
• ⑤逻辑“0”输入电压高达 • ⑥内置箱位二极管。 • (3)基本参数 • 工作电压:4.5^'36 V; • 单通道输出电流:600 mA; • 峰值输出电流:1.2A0 • C4)其他特性 • 输出数:4; • 类型:半桥式; • 输入类型:正相; • L293D封结与引脚:DIP16. • 1.5 V(高抗噪性);S OIC20 。
PO口的P0.0~P0.4连接电动机驱动模块,单片机的RST引脚和P1口 的P1.7,P1.6和P1.5连接ISP下载接口,用于和主机相连,下载程序。 追光机器人的电路原理框图如图6-1所示。
基于51单片机的红外遥控课程设计_课程设计
通信原理课程设计题 目 基于51单片机的红外遥控课程设计专 业 电子信息工程班 级 姓 名 学 号 指导教师惠州学院HUIZHOU UNIVERSITY目录第一章设计简介 (3)第二章系统方案 (3)一、设计方案对比 (3)二、方案设计 (5)第三章硬件设计 (5)一、红外遥控器 (5)二、红外接收模块部分 (7)第四章软件设计 (8)一、红外遥控器软件设计 (8)二、红外接收模块软件设计 (11)三、程序代码 (11)第五章测试及分析 (11)第六章结论 (11)第七章参考文献 (12)附录一(程序代码): (13)第一章设计简介本设计分为红外遥控器与红外接收模块两部分。
红外遥控器包括矩阵键盘、增强型51单片机(STC11L04E)、红外发射电路组成。
单片机扫描矩阵键盘后,将按键状态进行信源编码与信道编码,载波(38k脉冲)后由红外发射器发射。
红外接收模块部分由传统51单片机、数码管、一体化红外接收头组成。
一体化红外接收头将信号进行限幅放大、带通滤波、解调、积分、整形后输出解调信号至单片机,并由单片机输出解调信号。
第二章系统方案一、设计方案对比红外遥控器部分2.1.1 主控芯片方案一:HT6222方案二:STC11L04E分析:传统红外遥控器芯片HT6222具有性价比高、功能强大、稳定可靠、使用简单等特点,但该芯片难以零购。
STC11L04E为增强型51单片机,控制灵活(载波频率可调、通信协议可变更、用户码可变换)、价格较HT6222稍贵。
STC11L04E最大的特别是低功耗,功作电压低3.3V,易于应用于移动设备。
结论:由于STC11L04E单片机的灵活性以及学习性(可增强我们对一个完整通信系统的理解)。
因此我们采用方案二。
2.1.2 矩阵键盘方案一:3*6*2.5 贴片轻触开关方案二:6*6*6 直插轻触开关分析:3*6*2.5贴片轻触开关虽然体积小巧、美观,但与6*6*6直插轻触开关对比,在制板布线上较繁锁。
基于51单片机的蓝牙循迹小车

基于51单⽚机的蓝⽛循迹⼩车51单⽚机课程设计做了辆蓝⽛⼩车,下⾯是对课程设计内容的⼀些总结基于51单⽚机的蓝⽛循迹⼩车硬件模块L298N具体如图所⽰:⼯作原理简介:可以直接驱动两路 3-16V 直流电机,并提供了 5V 输出接⼝(输⼊最低只要 6V),可以给 5V 单⽚机电路系统供电。
输⼊电压最好是7v以上,输⼊电压低了会导致⼀系列问题,在后⾯有具体实践总结具体应⽤:可以⽅便的控制直流电机速度和⽅向,也可以控制 2 相步进电机,5 线 4 相步进电机。
管脚应⽤可以参考如图所⽰:①板载5V输出使能:如果跳线帽接上,则5v端⼦可以输出电压,若跳线帽没有街上,则12v输⼊端⼦没有作⽤,只能5v输⼊⼝输⼊(如果不接上直接废了,5v 输⼊基本不能使电机模块正常⼯作)②AB通道使能:端⼦接在上⾯表⽰AB通道⼀直保持⾼电平,处于使能状态,并且电压和5v输⼊端⼝电压相同;若处于没有使能状态,直接影响到输⼊端,让其⽆法⼯作!③单⽚机IO控制输⼊ + 马达AB输出 :顾名思义,四个IO输⼊端⼝和单⽚机四个IO⼝相连,然后通过电机驱动模块(双H桥电路)马达AB输出,以获得更⼤的驱动直流减速电机的能⼒,带动电机转动!B站直接搜L298N电机驱动模块,有视频详情介绍问题以及解决⽅案下⾯是⼀些使⽤L298N驱动电机的⼀些问题以及解决⽅法总结问题:1.直流减速电机不能正常转动,⼀个轮⼦只能单⽅向转动2.使能端⼝帽摘下来后,pwm信号输⼊问题3.供电问题解决:1.起初⽤4节南孚电池供电,⽤万⽤表测电压⼩于4.8v(电池快没啥电了),更换四节电池后⽤万⽤表测得4.9v+,上⾯出现的问题解决了2.输⼊端电压⼩于7v(⽤得四节南孚电池6v不到供电),使能电压和5v输⼊端⼦的电压相同,经测量5v端⼝电压只有3.8v左右,故使能电压就只有3.8v左右了,对PWM输出使能有⼀定影响3.L298N电机驱动中有稳压降压模块,如果供电⾜够⼤(⼤于7v),那么稳压降压模块会发挥作⽤,使得5v输⼊端⼦、使能端⼦、马达电机都能有稳定的5v⾼电平输出。
基于51单片机的扫地机器人的设计
基于51单片机的扫地机器人的设计AbstractThis paper presents the design and implementation of a floor cleaning robot based on the 51 single-chip microcontroller. The system is capable of detecting obstacles and cleaning a given floor area without human intervention. The robot uses a set of infrared sensors for obstacledetection and is controlled by a 51 single-chip microcontroller. The cleaning process is achieved by a pairof gear motors that drive the wheels and brushes of the robot. The robot is programmed using C language and is capable of mapping the cleaning process to ensure a thorough cleaning of a given floor area. The results were tested on various floor surfaces and showed that the robot is capable of cleaningfloors autonomously with an efficiency rate of up to 94%.Keywords: Floor cleaning robot, 51 single-chip microcontroller, Infrared sensors, Gear motors, C language IntroductionThe cleaning industry has experienced a significant transformation over the years, from manual cleaning to theuse of automated cleaning machines such as vacuum cleaners. The development of robotics technology has led to thecreation of autonomous cleaning robots capable of cleaning floors without human intervention. The use of autonomous cleaning robots has seen a significant increase in recent years, especially in commercial and industrial settings where large floor areas are involved. This paper presents thedesign and implementation of an autonomous floor cleaningrobot using a 51 single-chip microcontroller.Design and ImplementationThe floor cleaning robot was designed using a 51 single-chip microcontroller as its central processing unit. The robot has a set of infrared sensors mounted on its front and rear that allow it to detect obstacles and navigate around them. The robot's cleaning process is achieved using a pairof gear motors that drive the wheel and brushes of the robot. The cleaning process is programmed in C language, and the robot is capable of mapping the cleaning process to ensure a thorough cleaning of a given floor area.The robot's design comprises two separate circuits, a motor driver circuit, and a sensor circuit. The motor driver circuit is responsible for driving the robot's gear motors while the sensor circuit is responsible for detecting obstacles in the robot's path. The sensor circuit uses a set of infrared sensors mounted on the robot's front and rear, which can detect obstacles up to a distance of 1 meter.The motor driver circuit comprises a pair of L293D motor drivers that control the robot's gear motors. The gear motors drive the wheels and brushes and provide the necessary torque to ensure efficient cleaning. The motor driver circuit is controlled by the 51 single-chip microcontroller, which sends signals to the motor drivers to control the robot's movement.The robot's C program is designed to control the robot's movement and cleaning process. The program uses a set of predefined instructions that command the robot to move and clean a given floor area. The program also includes a mapping function that ensures a thorough cleaning of the floor area. The mapping function ensures that every part of the floor area is cleaned, and the robot does not leave any areasuncleaned.ResultsThe robot was tested on various floor surfaces, including tiles, carpet, and hardwood floors. The robot's performance was measured by its efficiency rate, which is the percentage of the floor area cleaned by the robot. Theresults showed that the robot is capable of cleaning floors autonomously with an efficiency rate of up to 94%.ConclusionThis paper presents the design and implementation of an autonomous floor cleaning robot using a 51 single-chip microcontroller. The robot is capable of detecting obstacles and cleaning a given floor area without human intervention. The robot's cleaning process is achieved by a pair of gear motors that drive the robot's wheels and brushes. The robot's programming language is C, and it includes a mapping function that ensures a thorough cleaning of the floor area. The results showed that the robot is capable of cleaning floors autonomously with an efficiency rate of up to 94%.。
基于stc89c51单片机的扫地机器人设计
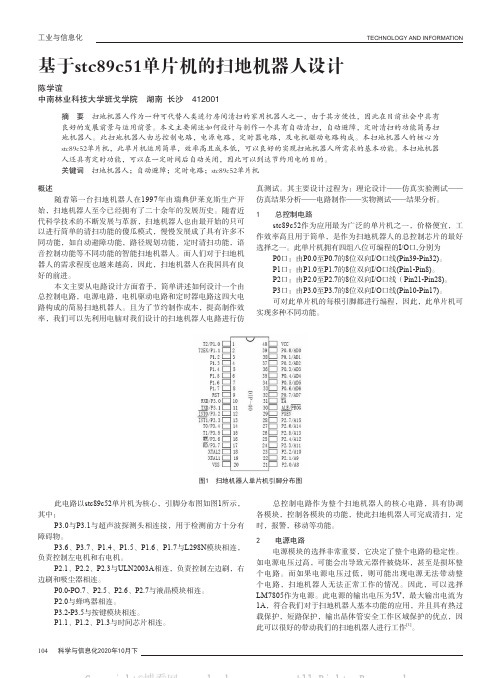
图1 扫地机器人单片机引脚分布图
单片机为核心,引脚分布图如图1所示,与超声波探测头相连接,用于检测前方十分有
L298N模块相连,
相连,负责控制左边刷,右
总控制电路作为整个扫地机器人的核心电路,具有协调各模块,控制各模块的功能,使此扫地机器人可完成清扫,定时,报警,移动等功能。
2 电源电路
电源模块的选择非常重要,它决定了整个电路的稳定性。
如电源电压过高,可能会出导致元器件被烧坏,甚至是损坏整个电路。
而如果电源电压过低,则可能出现电源无法带动整。
基于51单片机的“扫地机器人”设计报告

第十二届智能控制设计大赛初级组之基于51单片机的“扫地机器人”设计报告目录一、设计要求 ........................................................................................ 错误!未定义书签。
1.基本要求:.......................................................................................... 错误!未定义书签。
2.拓展要求:.......................................................................................... 错误!未定义书签。
二、设计思路 ........................................................................................ 错误!未定义书签。
三、方案比较 (3)1、洞洞板的选择 (3)2、芯片的选择 (3)3、单片机键盘的选择 (3)4、LCD的选择...................................................................................... 错误!未定义书签。
5、电源的选择....................................................................................... 错误!未定义书签。
6、储存模块的选择 (4)7、时钟模块的选择 (4)8、最终选用方案 (4)四、一些模块的选择及底盘制作 ........................................................... 错误!未定义书签。
【精品毕设】基于51单片机类人机器人智能巡线的设计与实现

毕业设计指导课基于51单片机类人机器人智能巡线的设计与实现摘要:针对类人机器人如何在规定的赛道上实现智能巡线行走的问题,提出采用利用灰度传感器识别赛道,并以51单片机为核心对机器人编程控制的方法,实现该类人机器人通过识别白色光敏带赛道,遇到转弯信号能及时反馈并准确转弯的功能。
通过脱机运行、步态调试和现场模拟等实验表明,基本实现类人机器人在规定赛道智能巡线行走,但存在反应调整时间长、速度较慢等问题还未有效解决。
经过适当改造之后,该机器人既能克服传统类人机器人结构复杂行走不稳的缺点,又可以在一定程度上模仿人类行走动作,实现在复杂外部环境地形内探测行走的问题。
关键词:智能巡线;灰度传感器;51单片机;类人机器人Design and Implementation of Intelligent Robot Tracking Control SystemBased on 51 SinglechipAbstract: For how the humanoid robot in the provisions of the track to achieve intelligent patrol line walking problem,proposed to use the gray sensor to identify the track and 51 single-chip as the core of the robot programming control method, To achieve the type of human robot through the identification of white light-sensitive track, encountered turn signal can be timely feedback and accurate turning function. Off-line operation, gait debugging and field simulation experiments show that the basic realization of the humanoid robot in the provisions of the track intelligent patrol line walking, but there is a long time to adjust the reaction, the speed is slow and other issues have not been effectively resolved. After appropriate modification, the robot can overcome the shortcomings of the traditional humanoid robot structure complex movement instability, but also to a certain extent, imitate the human walking action, in the complex external environment to detect the problem of walking within the terrain.Keywords: Intelligent inspection line; Gray scale sensor; 51 single chip; Humanoid robot目录目录 (1)第一章引言 (2)1.1选题背景及意义 (3)1.2 国内外研究现状 (3)1.3本文主要研究内容及章节安排 (3)第二章类人机器人的设计及控制 (3)2.1 类人机器人的智能巡线系统设计 (3)2.2 系统的优越性 (4)第三章硬件设计 (5)3.1 51单片机的电路设计 (5)3.2 灰度传感器的使用 (5)3.3 C型足的设计 (5)第四章总结 (6)参考文献 (7)第一章引言1.1选题背景及意义机器人技术是一项有远大前景的技术,不仅在科学、军事、工业、生活领域变得越来重要,而且智能教育机器人的研究也越来越普及。
基于MCS51的寻线机器人的设计与制作毕业设计--正文

基于MCS51的寻线机器人的设计与制作学校:武汉纺织大学学生姓名:XXXXXX指导老师:XXXX摘要寻线机器人由路线检测和电机驱动两部分组成。
其中路线检测部分本文根据红外光电传感器ST168利用红外线在不同颜色的物理表面具有不同的反射性质的特点,设计了传感器的检测与信号传输的接口电路,并完成了信号的处理程序,最终实现了整个机器对于线路的准确定位。
另外电机驱动部分本文根据L298N的步进电机驱动原理,本文设计了驱动模块的接口电路,并完成了对步进电机的驱动与转速的控制程序,最终实现了小车的转向控制要求。
本系统采用8位单片机AT89S52为核心控制器,利用5个红外光电传感器构成的光电传感器阵列采集路面信息,单片机获得传感器采集的路面信息,经过分析后控制步进电机的转动来控制智能车的走向,从而实现智能机器人沿给定的黑线快速平稳地行驶。
关键词:光电传感器;智能;寻迹;路径识别ABSTRACTThe hunting robot is composed of the route examination and the motor-driven two parts. And route examination partial this article according to ST168 using infrared sensor electrcal in different colors of physical surface with different characteristics of the reflection properties,this paper designs a sensor detection and signal transmission, interface circuit and completed the signal processing program, and finally realize the whole machine for accurate positioning of the line.Moreover motor-driven partial this article according to L298N stepping motor drive principle, this paper designs the driver module, interface circuit and completed the stepping motor driver and speed control procedures, finally realizes the car's steering control requirements.The system employs 8bit single-chip microcomputer AT89S52 as main controller and an array of photoelectric sensors for recognizing the path information. Single-chip Microcomputer energizes the servo to steer and control the stepping motor according to the analysis of the path information from sensors. Consequently, this intelligent vehicle can track the black-guide-line automatically and move forward following the line quickly and smoothly. The autonomous tracing principle of photoelectric sensor is presented. The effects of sensors’ array, overall arrangement, and space on the autonomous trace are discussed.Key words :photoelectric sensor ; intelligent vehicle ; autonomous tracing ; path recognition目录1. 系统总体设计方案 (1)1.1 系统分析 (1)1.2 系统设计结构图 (1)1.3 传感器设计方案 (2)2. 机械系统设计与实现 (4)2.1 本体机械建模 (4)2.2 本体结构的连接 (5)2.3 本体中心的调整 (5)2.4 前轮高度的调整 (5)2.5 寻迹传感器布局 (6)3. 硬件电路系统设计与实现 (8)3.1 MCS51最小系统 (8)3.1.1 AT89C52 (8)3.1.2 MCS最小系统 (11)3.2 光电传感器模块 (13)3.2.1 光电传感器工作原理 (13)3.2.2 红外传感器ST168 (15)3.3 电机驱动模块 (16)3.3.1 电机驱动芯片L298N (16)3.3.2 步进电机 (18)3.3.3 步进电动机的主要静态指标 (20)3.3.4 步进电动机的应用 (20)4. 智能小车软件设计 (21)4.1 总体流程图 (21)4.2 电机驱动模块流程图 (22)5. 系统安装与调试 (24)5.1 开发工具 (24)5.2 开发与调试过程 (24)5.3 开发中遇到的问题 (27)6. 总结与展望 (29)参考文献 (30)附录一 (31)1 系统总体设计方案1.1 系统分析智能机器人的总体工作模式为:红外光电传感器采集道路信息经过74HC245进行放大处理输入到89S52控制核心,进行进一步处理;控制核心处理好信息后又控制两个步进电机的转向;机器人转向通过控制两个步进电机的转向来控制。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
基于C51单片机的蓝牙远程智能扫雷机器人设计唐骁可贺师跨越(空军工程大学电气工程及其自动化专业陕西西安710000)目录特色说明2总体设计2基于单片机的金属探测技术3AD转换原理4超声波测距系统5温度采集系统6无线蓝牙数传模块HC-068MG995舵机9Wifi视频传输模块10控制部分11系统适用范围13特色说明:唯物主义认为,技术决定战术。
社会科技、生产和武器装备的发展,是影响作战方法变革、战争形态变化的最富活力的因素。
那么,现代高技术的发展和应用,使电子战成为决定战争胜负的关键,在现代高技术条件下,如不掌握电子战的优势,就可能丧失战场主动权,很难赢得胜利。
我们开发的基于C51单片机的蓝牙远程智能扫雷机器人正是为了现代化战争中减少人员伤亡,应用于高危场所,以蓝牙为数据传输载体,实现实时控制,视频传输和爆炸物监测,温度采集,测距等功能的智能系统而制作的。
总体设计:此智能扫雷机器人主要通过51单片机进行控制,通过HC-06蓝牙模块与上位机进行通信,由于处理的数据较多所以采用三块单片机最为从机,通信模式采用串口多机通信模式,上位机控制程序采用Visual basic6.0编写,上位机与蓝牙配对后,会新增一个无线串口,在VB中可采用MSComm控件打开无线串口,实现与从机的无线通行,上位机控制程序主要负责通过无线蓝牙串口发送控制指令,并处理从机返回的数据,从机主要负责从上位机接收指令并完成相应的操作,从机控制电机的驱动以达到控制机器人位置的改变,控制DS18B20温度模块采集温度,控制超声波测距模块采集摄像头前方到障碍物的距离,控制舵机的角度改变云台摄像头的视角,控制接近式开关监测机器人下方是否有爆炸物,之后再返回由从机处理完的数据给上位机。
由于视频信息数据量太大所以采用专用的wifi视频传输模块进行视频信息的传输以达到实时监控的目的。
总体设计:设计模块图如图1示:根据图1,本设计需要器件清单见表1。
图1元件数量元件数量元件数量C52单片机3蓝牙模块1PC端11舵机2AD转换器1Wifi视频模块1接近式开关1摄像头1电机驱动模块电机2超声波传感器1履带式底盘1基于单片机的金属探测技术探测金属的理论依据金属探测器是采用线圈的电磁感应原理来探测金属的。
根据电磁感应原理,当有金属物靠近通电线圈平面附近时,将发生如下现象和效应:1.线圈介质条件的变化:当金属物接近通电线圈时,将使通电线圈周围的磁场发生变化:1,对于半径为R的单匝圆形电感中,通过交变电流I=Imcos t时,线圈周围空间产生交变磁场,根据毕奥一萨伐尔定律可计算出线圈中心轴线上一点的磁感应强度B2.涡流效应:根据电磁理论,我们知道,当金属物体被置于变化的磁场中时,金属导体内就会产生自行闭合的感应电流,这就是金属的涡流效应。
涡流要产生附加的磁场,与外磁场方向相反,削弱外磁场的变化。
据此,将一交流正弦信号接入绕在骨架上的空心线圈上,流过线圈的电流在周围产生交变磁场,当将金属靠近线圈时,金属产生的涡流磁场的去磁作用会削弱线圈磁场的变化。
金属的电导越大,交变电流的频率越大,则涡电流强度越大,对原磁场的抑制作用越强。
通过以上分析可知,当有金属物靠近通电线圈平面附近时,无论是介质磁导率的变化,还是金属的涡流效应均能引起磁感应强度B的变化。
对于非铁磁性的金属〔包括抗磁体如:金、银、铜、锌等)和顺磁体(如锰、铬、钦等)]大,可认为是既导电又导磁物质,主要产生磁效应,同时又有涡流效应。
本设计正是基于这样的理论,来寻找一种方法来体现这种变化。
原理简介:物体LC振荡器开关级放大输出级Object LC oscillator switching stage magnified output stage电感式接近开由三大部分组成:振荡器、开关电路及放大输出电路。
振荡器产生一个交变磁场。
当金属物体接近这一磁场,并达到感应距离时,在金属物体内产生涡流,从而导致振荡衰减,以至停振。
振荡器振荡及停振的变化被后级放大电路处理并转换成开磁信号,触发驱动控制器件,从而达到非接触式这检测目的。
物体离传感器越近,线圈内的阻尼就越大,阻尼越大,传感器振荡器的电流越小。
AD转换模块所谓A/D转换器就是模拟/数字转换器(ADC),是将输入的模拟信号转换成数字信号。
信号输入端可以是传感器或转换器的输出,而ADC的数字信号也可能提供给微处理器,以便广泛地应用。
2,ADC0804的规格及引脚图8位COMS依次逼近型的A/D转换器.三态锁定输出存取时间:135US分辨率:8位转换时间:100US总误差:正负1LSB工作温度:ADC0804LCN---0~70度/CS芯片选择信号。
/RD外部读取转换结果的控制输出信号。
/RD为HI时,DB0~DB7处理高阻抗:/RD为LO时,数字数据才会输出。
/WR:用来启动转换的控制输入,相当于ADC 的转换开始(/CS=0时),当/WR由HI变为LO时,转换器被清除:当/WR回到HI时,转换正式开始。
CLK IN,CLK R:时钟输入或接振荡无件(R,C)频率约限制在100KHZ~1460KHZ,如果使用RC电路则其振荡频率为1/(1.1RC)/INTR:中断请求信号输出,低地平动作. VIN(+)VIN(-):差动模拟电压输入.输入单端正电压时,VIN(-)接地:而差动输入时,直接加入VIN(+)VIN(-).AGND,DGND:模拟信号以及数字信号的接地.VREF:辅助参考电压. DB0~DB7:8位的数字输出.VCC:电源供应以及作为电路的参考电压.功能说明1,ADC0804将输入模拟值转换成数字值输出到P0,使相对应的LED亮.如输入3V,ADC0804的输出应为96H=10010110,此数字信号送入8051的P1,再由P1存入8051的累加器,然后累加器再到P0,使相应的LED亮.2,先将ADC0804的参考电压VREF调整为2.56V.(在腾龙套件中主要演示原理,未作此精确调整电压,用2个1K电阻分压,约2.5V) 3调整ADC0804的VIN可变电阻器.由0V调到5V根据其关系观察P1的LED变化情形.超声波测距系统由于超声波指向性强,能量消耗缓慢,在介质中传播的距离较远,因而超声波经常用于距离的测量,如测距仪和物位测量仪等都可以通过超声波来实现。
利用超声波检测往往比较迅速、方便、计算简单、易于做到实时控制,并且在测量精度方面能达到工业实用的要求因此在移动机器人研制上也得到了广泛的应用。
为了使移动机器人能自动避障行走,就必须装备测距系统,以使其及时获取距障碍物的距离信息(距离和方向)。
本文所介绍的三方向(前、左、右)超声波测距系统,就是为机器人了解其前方、左侧和右侧的环境而提供一个运动距离信息。
超声波测距原理图1压电式超声波发生器实际上是利用压电晶体的谐振来工作的。
超声波发生器内部结构如图1所示,它有两个压电晶片和一个共振板。
当它的两极外加脉冲信号,其频率等于压电晶片的固有振荡频率时,压电晶片将会发生共振,并带动共振板振动,便产生超声波。
反之,如果两电极间未外加电压,当共振板接收到超声波时,将压迫压电晶片作振动,将机械能转换为电信号,这时它就成为超声波接收器了。
超声波发射器向某一方向发射超声波,在发射时刻的同时开始计时,超声波在空气中传播,途中碰到障碍物就立即返回来,超声波接收器收到反射波就立即停止计时。
超声波在空气中的传播速度为340m/s,根据计时器记录的时间t,就可以计算出发射点距障碍物的距离(s),即:s=340t/2。
这就是所谓的时间差测距法。
超声波测距的原理是利用超声波在空气中的传播速度为已知,测量声波在发射后遇到障碍物反射回来的时间,根据发射和接收的时间差计算出发射点到障碍物的实际距离。
由此可见,超声波测距原理与雷达原理是一样的。
测距的公式表示为:L=C×T式中L为测量的距离长度;C为超声波在空气中的传播速度;T为测量距离传播的时间差(T为发射到接收时间数值的一半)。
超声波测距主要应用于倒车提醒、建筑工地、工业现场等的距离测量,虽然目前的测距量程上能达到百米,但测量的精度往往只能达到厘米数量级。
由于超声波易于定向发射、方向性好、强度易控制、与被测量物体不需要直接接触的优点,是作为液体高度测量的理想手段。
在精密的液位测量中需要达到毫米级的测量精度,但是目前国内的超声波测距专用集成电路都是只有厘米级的测量精度。
通过分析超声波测距误差产生的原因,提高测量时间差到微秒级,以及用LM92温度传感器进行声波传播速度的补偿后,我们设计的高精度超声波测距仪能达到毫米级的测量精度。
超声波测距误差分析根据超声波测距公式L=C×T,可知测距的误差是由超声波的传播速度误差和测量距离传播的时间误差引起的。
温度传感器DS18b20DS18B20的读写时序和测温原理与DS1820相同,只是得到的温度值的位数因分辨率不同而不同,且温度转换时的延时时间由2s减为750ms。
DS18B20测温原理如图3所示。
图中低温度系数晶振的振荡频率受温度影响很小,用于产生固定频率的脉冲信号送给计数器1。
高温度系数晶振随温度变化其振荡率明显改变,所产生的信号作为计数器2的脉冲输入。
计数器1和温度寄存器被预置在-55℃所对应的一个基数值。
计数器1对低温度系数晶振产生的脉冲信号进行减法计数,当计数器1的预置值减到0时,温度寄存器的值将加1,计数器1的预置将重新被装入,计数器1重新开始对低温度系数晶振产生的脉冲信号进行计数,如此循环直到计数器2计数到0时,停止温度寄存器值的累加,此时温度寄存器中的数值即为所测温度。
斜率累加器用于补偿和修正测温过程中的非线性,其输出用于修正计数器1的预置值。
图3DS18B20数字温度传感器接线方便,封装成后可应用于多种场合,如管道式,螺纹式,磁铁吸附式,不锈钢封装式,型号多种多样,有LTM8877,LTM8874等等。
主要根据应用场合的不同而改变其外观。
封装后的DS18B20可用于电缆沟测温,高炉水循环测温,锅炉测温,机房测温,农业大棚测温,洁净室测温,弹药库测温等各种非极限温度场合。
耐磨耐碰,体积小,使用方便,封装形式多样,适用于各种狭小空间设备数字测温和控制领域。
1:技术性能描述①、独特的单线接口方式,DS18B20在与微处理器连接时仅需要一条口线即可实现微处理器与DS18B20的双向通讯。
②、测温范围-55℃~+125℃,固有测温误差(注意,不是分辨率,这里之前是错误的)1℃。
③、支持多点组网功能,多个DS18B20可以并联在唯一的三线上,最多只能并联8个,实现多点测温,如果数量过多,会使供电电源电压过低,从而造成信号传输的不稳定。
④、工作电源:3.0~5.5V/DC(可以数据线寄生电源)⑤、在使用中不需要任何外围元件⑥、测量结果以9~12位数字量方式串行传送⑦、不锈钢保护管直径Φ6⑧、适用于DN15~25,DN40~DN250各种介质工业管道和狭小空间设备测温⑨、标准安装螺纹M10X1,M12X1.5,G1/2”任选⑩、PVC电缆直接出线或德式球型接线盒出线,便于与其它电器设备连接。