精品-智能机器人设计与制作word
智能机器人设计与制作报告
智能机器人设计与制作报告引言智能机器人是当今科技领域的热门话题。
它能够模拟人类行为并进行智能交互,拥有自主决策和学习能力。
本报告将详细介绍智能机器人的设计与制作过程,包括硬件选型、软件开发和系统集成等方面。
设计与制作过程1. 硬件选型智能机器人的硬件选型对整个设计过程至关重要。
我们选择了一款具备强大计算能力和多传感器支持的单板计算机作为主控,如树莓派。
它的开源特性和强大的社区支持使得我们能够更好地实现自定义功能。
同时,我们选择了高精度的摄像头、声音传感器、触摸传感器和超声波传感器等来满足不同的交互需求。
2. 软件开发智能机器人的软件开发是建立在硬件选型的基础上的。
我们选择了Python 作为主要的开发语言,因为它具有简洁、易学且功能强大的特点。
我们使用Python 开发了机器人的主控程序,包括感知、决策和执行三个主要模块。
在感知模块中,我们使用了OpenCV 来处理图像和视频流数据,并实现目标检测和人脸识别等功能。
声音传感器和超声波传感器用于接收环境的声音和距离信息,以便机器人能够做出相应的反应。
同时,我们还使用了机器学习算法来提高机器人的识别能力,并实现自动学习。
在决策模块中,我们使用了逻辑推理和规则引擎来解析和处理感知模块得到的数据,并做出合理的决策。
我们通过编程和数据训练机器人,使其能够理解人类的语言和意图,并做出相应的回应。
在执行模块中,我们使用舵机和电机等执行器来控制机器人的身体动作。
根据决策模块的结果,机器人可以进行移动、抓取、旋转和摇头等动作,以实现与环境的交互。
3. 系统集成在软件开发完成后,我们需要进行系统集成,将各个模块整合到一起,并进行功能测试。
我们使用Raspberry Pi 的GPIO 引脚来连接传感器和执行器,以实现硬件与软件的交互。
通过调试和测试,我们最终得到了一个具备智能交互能力的机器人。
结论通过对智能机器人的设计与制作过程的详细介绍,我们了解了智能机器人的核心组成部分以及相关技术的应用。
工业机器人结构设计【含全套CAD图纸和WORD说明书】

工业机器人结构设计00(陕理工机械工程学院机自专业000班,陕西汉中 723003)指导教师:000[摘要]本文简要介绍了工业机器人的概念,机器手硬件和软件的组成,即plc控制的机械手的系统工作原理,机械手各个部件的整体尺寸设计,plc控制的特点。
本文对机械手进行总体方案设计,确定了机械手的坐标形式和自由度,确定了机械手的技术参数。
同时设计了机械手的夹持式手部结构,设计了机械手的手腕结构,计算出了手腕转动时所需的驱动力矩和回转气缸的驱动力矩.设计了机械手的手臂结构。
利用可编程序控制器对机械手进行控制,选取了合适的plc型号,根据机械手的工作流程制订了可编程序控制器的控制方案,画出了机械手的工作时序图,并绘制了可编程序控制器的控制程序.[关键词]工业机器人机械手The Industrial robot design000(Grade00,Class00,Major Mechanical Design,Manufacturing and Automation,415Dept。
,Shaanxi University of Technology,Hanzhong 723003,Shaanxi)Tutor:000Abstract This paper introduces the concept of the composition of industrial robots,robot hardware and software, system working principle that plc manipulator control,the overall size of the various components of the robot design, plc control characteristics. In this paper,the robot overall program design,to determine the coordinates of the robot forms and degrees of freedom to determine the technical parameters of the robot。
(完整word版)机器人实验报告
机器人实验报告机器人实验报告1. 首先观察机器人行走的每一个动作,并记录动作是怎么样执行的,并且记录舵机的位置。
打开robot软件接入机器人,进行对人形机器人调节每一个动作,达到行走的目的。
【实验器材】电脑、人形机器人、下载线、电源。
【实验步骤】一.检测仿生机器人设备能不能正常运行。
二.启动仿生机器人控制软件,并且连接机器人。
三.编辑人形机器人的动作。
1. 添加人形机器人的初始位置。
添加人形机器人的动作。
3. 添加人形机器人的循环动作。
4. 设置人形机器人的结束动作。
5. 保存和尚在编辑完的动作。
6. 演示人形机器人所编辑的动作。
7. 对不符合的动作进行修正。
【注意事项】1. 在用人形机器人时,首先要充满电。
在下载程序时不要动机器人。
3. 在编辑时两个动作不能跨度过大。
4. 在演示时以防机器人摔倒。
【实验结论】用控制软件的编程可以使机器人达到行走的目的。
【实验体会和心得】通过本实验加深我们对机器人的了解,更进一步的掌握了各部件之间的功能特性。
让我们在以后更多的实验中能灵活应用探究方法和操作能力。
除此,我们在机器人教学中培养了我们的兴趣,创新能力,分析能力和动手操作能力,激发了我们学习、探索、掌握和运用智能机器人技术的兴趣,提高我们爱科学、学科学、用科学的积极性,丰富我们的课余文化生活,增强我们的探究意识、进取意识、团队意识和竞争意识。
特别是在机器人的编程和调试方面,我们通过亲手装配、实验、编程和实施机器人项目、直至达到我们所需要的结果。
这过程使们们获得发自内心的快乐,同时也培养了我们的动手实践能力、创新思维能力、综合应用能力和团结协作能力。
通过机器人实验我们觉得自己变得更从容、更自信、更具有成就感。
通过实验操作,我们的能力在动手操作和探究方面都得到较大的提升。
同时我们也体会到了团队合作的重要性。
附送:机场不可撤销担保书机场不可撤销担保书。
二、本保证书保证归还借款人在字第号贷款合同项下不按期偿还的全部或部分到期贷款本息,并同意在接到贵行书面通知后十四天内代为偿还借款人所欠借款本息。
智能机器人的设计与制作
智能机器人的设计与制作引言近几年机器人已成为高技术领域内具有代表性的战略目标。
机器人技术的出现与进展,不但使传统的工业生产面貌发生根本性变化,而且将对人类社会产生深远的影响。
随着社会生产技术的飞速进展,机器人的应用领域不断扩展。
从自动化生产线到海洋资源的探索,乃至太空作业等领域,机器人可谓是无处不在。
目前机器已经走进人们的生活与工作,机器人已经在很多的领域代替着人类的劳动,发挥着越来越重要的作用,人们已经越来越离不开机器人帮助。
机器人工程是一门复杂的学科,它集工程力学、机械制造、电子技术、技术科学、自动操纵等为一体。
目前对机器人的研究已经呈现出专业化与系统化,一些信息学、电子学方面的先进技术正越来越多地应用于机器人领域。
目前机器人行业的进展与30 年前的电脑行业极为相似。
今天在汽车装配线上忙碌的一线机器人,正是当年大型计算机的翻版。
而机器人行业的利基产品也同样种类繁多,比如协助医生进行外科手术的机械臂、在伊拉克与阿富汗战场上负责排除路边炸弹的侦察机器人、与负责清扫地板的家用机器人,还有很多参照人、狗、恐龙的样子制造机器人玩具。
舞蹈机器人具有人类外观特征、可爱的外貌、又兼有技术含量,极受青少年的喜爱。
我从前年开始机器人方面的研究,在这过程中尝试过很多次的失败,也感受到了无比的乐趣。
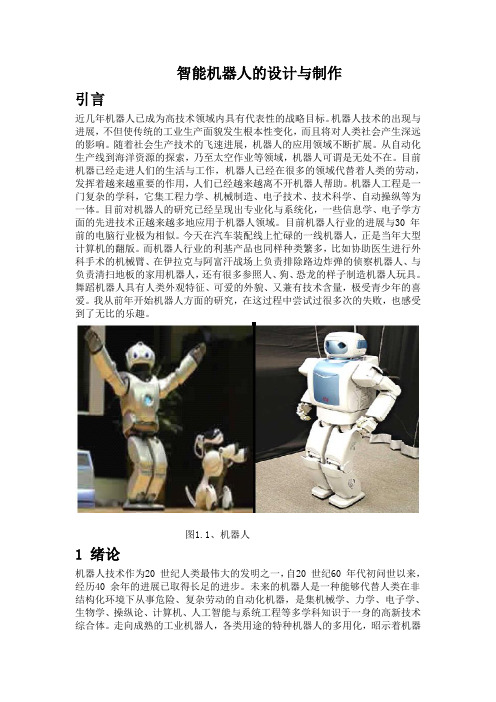
图1.1、机器人1 绪论机器人技术作为20 世纪人类最伟大的发明之一,自20 世纪60 年代初问世以来,经历40 余年的进展已取得长足的进步。
未来的机器人是一种能够代替人类在非结构化环境下从事危险、复杂劳动的自动化机器,是集机械学、力学、电子学、生物学、操纵论、计算机、人工智能与系统工程等多学科知识于一身的高新技术综合体。
走向成熟的工业机器人,各类用途的特种机器人的多用化,昭示着机器人技术灿烂的明天。
1.1 国内外机器人技术进展的现状为了使机器人能更好的应用于工业,各工业发达国家的大学、研究机构与大工业企业对机器人系统开发投入了大量的人力财力。
简单的机器人制作教程
简单的机器人制作教程这是一个最简单的机器人,一个振动机器人,即以偏心摆锤马达的震动效果作为挪动的动力,算是一种非常简单的BEAM机器人。
整个造型就像一只臭虫,由于振动时接近狂飙一样的不规则运动方式,所以起名为“暴走的臭虫”。
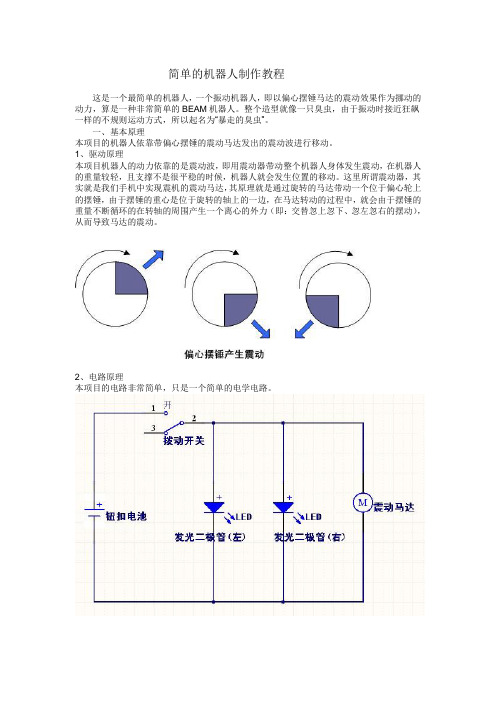
一、基本原理本项目的机器人依靠带偏心摆锤的震动马达发出的震动波进行移动。
1、驱动原理本项目机器人的动力依靠的是震动波,即用震动器带动整个机器人身体发生震动,在机器人的重量较轻,且支撑不是很平稳的时候,机器人就会发生位置的移动。
这里所谓震动器,其实就是我们手机中实现震机的震动马达,其原理就是通过旋转的马达带动一个位于偏心轮上的摆锤,由于摆锤的重心是位于旋转的轴上的一边,在马达转动的过程中,就会由于摆锤的重量不断循环的在转轴的周围产生一个离心的外力(即:交替忽上忽下、忽左忽右的摆动),从而导致马达的震动。
2、电路原理本项目的电路非常简单,只是一个简单的电学电路。
这里我们采用类似电子表所使用的微型钮扣电池作为机器人的能源;采用手机震机用的震动马达作为动力源;采用LED发光二极管作为发光的眼睛;而控制控制机器人启动的开关则是选择一般的小型选择拨动开关。
需要注意的是,一般的选择拨动开关有三个引脚,其中拨动开关可以使中间的引脚(上图之2)有选择的接通两边(上图之1和3)任意一侧的其中一个引脚。
同时,用于做眼睛发光的LED发光二极管的引脚是区分正负极的。
另外提一下,LED发光二极管是有一个启辉电压的,大概是2V多左右,只有供电的电压达到这个值时发光管才会发光。
本项目中,是使用了两只发光二极管作为眼睛的。
机器人开始启动的时候,发光二极管是会发光的,当发现其不亮的时候,就是说明电池的电能已经消耗了不少,电池的电压已经下降到发光二极管无法点亮的程度,这种时候震动马达还是会继续震动的。
因为震动马达启动的电压并不高,在电池的电压已经下降了很多的程度下震动马达还是可以继续工作。
其中注意:1、拨动开关选用1、2两个引脚;2、LED发光二极管的引脚是区分正负极的,要对应连接到电池的正负电极(下面有说明判别的方法);3、钮扣电池的外壳,只有一面金属部分的是负极,整个包住周围以及其中一面的金属部分是正极(见下图所示)。
《第二单元第1课智能机器人》作业设计方案-初中信息技术青岛版24第六册自编模拟
《智能机器人》作业设计方案(第一课时)一、作业目标本节课的作业设计旨在帮助学生掌握智能机器人的基本概念和基础知识,理解机器人的构成及其在现实生活中的应用。
通过作业实践,让学生熟悉机器人的编程和操作流程,提高他们解决实际问题的能力,并激发学生对信息技术和智能机器人技术的兴趣。
二、作业内容1. 理论学习:学生需认真阅读智能机器人相关教材内容,了解机器人的发展历程、基本构成和主要功能。
同时,学生需要理解机器人编程的基本概念,如传感器数据读取、执行器控制等。
2. 编程实践:学生需使用指定的编程软件(如Scratch或Python),编写简单的机器人运动控制程序。
这一步主要培养学生初步的编程能力,以及对机器人基本指令的熟悉程度。
3. 实物操作:学生在真实或模拟的智能机器人平台上进行操作练习。
具体包括连接机器人各部分硬件、安装传感器和执行器,以及通过编程软件控制机器人进行简单的动作。
4. 创意设计:学生需设计一个简单的机器人项目,如自动扫地机器人或避障小车等,并绘制出项目设计草图。
这一步旨在培养学生的创新思维和实际操作能力。
三、作业要求1. 理论学习部分:学生需将教材中的重点内容整理成笔记,并总结出自己对智能机器人知识的理解。
2. 编程实践部分:学生需编写至少两个简单的机器人运动控制程序,并确保程序能在模拟或实际机器人平台上正常运行。
3. 实物操作部分:学生需按照指导手册的步骤进行操作,并确保所有硬件连接正确、传感器和执行器工作正常。
4. 创意设计部分:学生需设计一个具有实用性和创新性的机器人项目,并在草图中详细标注出各个部分的功能和连接方式。
设计过程中,学生可参考教材中的案例和网上资源,但需保持原创性。
四、作业评价教师将根据以下标准对学生的作业进行评价:1. 理论学习部分:评价学生对智能机器人知识的理解和笔记的完整性。
2. 编程实践部分:评价学生编写的程序是否正确、能否正常运行以及程序的创意性。
3. 实物操作部分:评价学生的硬件连接是否正确、传感器和执行器是否工作正常以及操作过程的规范性。
(完整word版)机器人实验报告
机器人实验报告机器人实验报告1. 首先观察机器人行走的每一个动作,并记录动作是怎么样执行的,并且记录舵机的位置。
打开robot软件接入机器人,进行对人形机器人调节每一个动作,达到行走的目的。
【实验器材】电脑、人形机器人、下载线、电源。
【实验步骤】一.检测仿生机器人设备能不能正常运行。
二.启动仿生机器人控制软件,并且连接机器人。
三.编辑人形机器人的动作。
1. 添加人形机器人的初始位置。
添加人形机器人的动作。
3. 添加人形机器人的循环动作。
4. 设置人形机器人的结束动作。
5. 保存和尚在编辑完的动作。
6. 演示人形机器人所编辑的动作。
7. 对不符合的动作进行修正。
【注意事项】1. 在用人形机器人时,首先要充满电。
在下载程序时不要动机器人。
3. 在编辑时两个动作不能跨度过大。
4. 在演示时以防机器人摔倒。
【实验结论】用控制软件的编程可以使机器人达到行走的目的。
【实验体会和心得】通过本实验加深我们对机器人的了解,更进一步的掌握了各部件之间的功能特性。
让我们在以后更多的实验中能灵活应用探究方法和操作能力。
除此,我们在机器人教学中培养了我们的兴趣,创新能力,分析能力和动手操作能力,激发了我们学习、探索、掌握和运用智能机器人技术的兴趣,提高我们爱科学、学科学、用科学的积极性,丰富我们的课余文化生活,增强我们的探究意识、进取意识、团队意识和竞争意识。
特别是在机器人的编程和调试方面,我们通过亲手装配、实验、编程和实施机器人项目、直至达到我们所需要的结果。
这过程使们们获得发自内心的快乐,同时也培养了我们的动手实践能力、创新思维能力、综合应用能力和团结协作能力。
通过机器人实验我们觉得自己变得更从容、更自信、更具有成就感。
通过实验操作,我们的能力在动手操作和探究方面都得到较大的提升。
同时我们也体会到了团队合作的重要性。
附送:机场不可撤销担保书机场不可撤销担保书。
二、本保证书保证归还借款人在字第号贷款合同项下不按期偿还的全部或部分到期贷款本息,并同意在接到贵行书面通知后十四天内代为偿还借款人所欠借款本息。
机器人MicrosoftWord文档
机器人MicrosoftWord文档第8课机器人教学设计方新小学杨芬一、设计思路机器人是一个充满想象的题材,让学生大胆无畏的自由畅想机器人的功能,外形,并且能用生活中的各种材料创意的完成机器人的设计制作,在轻松的氛围中感受美术学习的乐趣。
二、教材分析本课是人美版美术教材三年级下册第8课,属于造型表现领域,通过画一画、做一做机器人,使学生初步了解机器人的简单知识,了解机器人与人类的关系,并用综合技法完成作品,感受艺术创作的乐趣。
三、学情分析三年级学生经过两年的学习,已经开始从涂鸦期向理论技法学习的慢慢转变,对线条色彩有一定的运用基础,思维活跃,动手能力强,对手工及综合制作有浓厚的兴趣。
机器人这个题材对于他们也很有吸引力,学生十分感兴趣。
四、三维目标根据我的教学理念,依据学生基本情况,我确定本课教学目标为以下三点1、知识与技能:通过学习,简单了解机器人的相关知识,感受机器人与人类的密切关系。
2、过程与方法:能大胆的发挥想象力,并用多种形式表现或制作机器人。
3、情感态度价值观:通过学习,培养学生创新精神,激发学生美术学习的兴趣,和对热爱科学创造的热情。
五、教学准备课件综合材料(画纸、刮画纸、印章、等)六、教学过程1、导入:组织学生,谈话导入课题。
老师从小到大都非常羡慕一个人,就是他——大雄,羡慕他,并不是因为他长得帅,而是因为羡慕他拥有一个无所不能的叮当,能帮他解决各种问题,不知道你们有没有和老师一样的想法?(问):假如你会有一个机器人,你最希望他帮你做什么?其实,随着科技的发展现在人类其实也发明很多机器人,这节课我们就一起走进第八课机器人。
2、新授A、引导学生欣赏机器人图片,感受机器人的造型特点应与功能相结合。
看看现在在那些领域已经有了机器人,他们长什么样子。
B、启发学生大胆设计自己的机器人的造型。
我们发现,他们长什么样子一部分是根据功能来决定的,加上设计师的创意,(问)那你想设计制作一个什么样子的机器人?小组讨论,并汇报。
智能机器人的设计与制作
智能机器人的设计与制作近年来,随着科技的不断进步,人工智能逐渐走入我们的生活,并在各个领域发挥重要作用。
其中,智能机器人作为人工智能的重要应用之一,受到了广泛关注。
本文将就智能机器人的设计与制作进行探讨。
一、智能机器人的定义与应用领域智能机器人是指利用人工智能技术实现感知、决策、执行等一系列智能功能的机器设备。
它不仅可以感知环境、理解人类语言,还能根据情境做出合理反应。
智能机器人广泛应用于工业生产、医疗卫生、军事安防等领域。
在工业生产中,智能机器人可以替代人工完成繁重、高危的工作,提高生产效率和质量。
在医疗卫生领域,智能机器人可以辅助医生进行手术操作、护理病人等工作。
在军事安防方面,智能机器人可以用于巡逻、侦查、排除危险等任务。
二、智能机器人的主要组成部分智能机器人主要由感知、决策和执行系统构成。
感知系统是智能机器人获取外界信息的重要途径。
一般包括摄像头、声音传感器、触摸传感器等。
通过感知系统,智能机器人可以获取环境信息,如识别人脸、听懂语音等。
决策系统是智能机器人进行分析和决策的核心部分。
通过算法和模型,智能机器人可以对感知到的信息进行分析,并做出合理的决策。
例如,在工业生产中,智能机器人能够根据传感器获取的数据判断机器是否出现故障,并采取相应的措施进行修复。
执行系统是智能机器人实现决策结果的方式。
执行系统一般包括机械臂、轮子等设备。
通过执行系统,智能机器人可以实现自主移动、抓取物体等动作。
三、智能机器人的设计与制作步骤1.需求分析:首先确定智能机器人的具体功能和应用场景。
例如,如果是用于工业生产,需要考虑其对机器故障进行自动检测和维修的能力。
2.硬件设计:根据需求分析的结果,设计智能机器人的硬件结构。
包括机械结构、传感器配置等。
确保机器人能够实现感知、决策和执行的功能。
3.软件编程:编写智能机器人的控制程序。
通过合适的算法和模型,实现机器人的自主决策能力。
例如,可以使用机器学习算法让机器人自动学习和改进自己的行为。
robots设计Word 文档
三、机器人的分类经过几十年的发展,机器人的技术水平不断提高,应用范围越来越广,从早期的焊接、装配等工业应用,逐步向军事、空间、水下、农业、建筑、服务和娱乐等领域不断扩展,结构形式也多种多样。
因此,机器人的分类也出现了多种方法、多种标准,本章主要介绍以下三种分类法。
1.按照机器人的技术发展水平分按照机器人的技术发展水平可以将机器人分为三代。
第一代机器人是“示教再现”型。
这类机器人能够按照人类预先示教的轨迹、行为、顺序和速度重复作业。
示教可以由操作员“手把手”地进行,比如,操作人员抓住机器人上的喷枪,沿喷漆路线示范一遍,机器人记住了这一连串运动,工作时,自动重复这些运动,从而完成给定位置的喷漆工作。
这种方式即是所谓的“直接示教”。
但是,比较普遍的方式是通过控制面板示教。
操作人员利用控制面板上的开关或键盘来控制机器人一步一步地运动,机器人自动记录下每一步,然后重复。
目前在工业现场应用的机器人大多属于第一代。
第二代机器人具有环境感知装置,能在一定程度上适应环境的变化。
以焊接机器人为例,机器人焊接的过程一般是通过示教方式给出机器人的运动曲线,机器人携带焊枪走这个曲线,进行焊接。
这就要求工件的一致性很好,也就是说工件被焊接的位置必须十分准确。
否则,机器人走的曲线和工件上的实际焊缝位置会有偏差。
为了解决这个问题,第二代机器人采用了焊缝跟踪技术,通过传感器感知焊缝的位置,再通过反馈控制,机器人就能够自动跟踪焊缝,从而对示教的位置进行修正,即使实际焊缝相对于原始设定的位置有变化,机器人仍然可以很好地完成焊接工作。
类似的技术正越来越多地应用在机器人上。
第三代机器人称为“智能机器人”,具有发现问题,并且能自主地解决问题的能力。
作为发展目标,这类机器人具有多种传感器,不仅可以感知自身的状态,比如所处的位置、自身的故障情况等等;而且能够感知外部环境的状态,比如自动发现路况、测出协作机器的相对位置、相互作用的力等等。
更为重要的是,能够根据获得的信息,进行逻辑推理、判断决策,在变化的内部状态与变化的外部环境中,自主决定自身的行为。
(完整word版)机器人课程设计方案(word文档良心出品)
本部分的任务是针对学生的已经完成的机器人进行测试,让学生以小组为单位,针对机器人设计的要求,来对机器人搭建的完成情况来进行测试和比赛,同时增加学生的竞争意识
科目评价
一、评价内容
1、知识方面
对现代机器人的发展有一定的认识,知道机器人的设计原理
知道一些智能机器的编程方式
2、技能方面
能否掌握2种机器人的搭建方式和制作技巧
科目简介
本课程是以机器人介绍和制作为主,主要通过介绍现代机器人的发展和自己动手制作几个简单的机器人为主要内容,通过机器人的制作培养学生的动手操作能力,通过制造机器人时的分组培养学生的团队合作能力,通过将机器人以一定目的进行改造培养学生的科学素养,通过机器人的比赛养成一定的竞争意识。
学习目标
一、知识与技能
我校具有一定的机器人中一些优秀的辅导师资力量,也拥有一定的开始机器人兴趣课程的历史,在前几年的机器人教学尝试过程中积累了一定的有关机器人教学的教学经验,完善机器人教学,并形成了一系列机器人教学的教学体系。
现在评价学生一个能力已经不仅仅是看学生的学习成绩,而更多看重的是学生的综合素质,而机器人的课程就是旨在培养学生的综合科学素养所开展的,本课程以传统课程上所没有的动手活动和理论学习模式相结合的模式,在丰富多彩的教学活动中培养学生的动手能力,团队配合能力和科学探索精神。
2、动手实践
这一部分是这门科目的重点内容,这一部分的内容主要结合松江区中小学机器人大赛的相关器材和项目让学生以小组为单位在已有材料的基础上搭建机器人的已完成相关的目的,在小组合作的基础上,用自己的学习和创造能力,模仿老师给予的机器人模型利用材料来完成两个分别是四脚和六脚的机器人,同时开发自己的想象力,在一定的规定下对机器人进行改造,是机器人能更好的完成所需要完成的任务。在完成了已有的任务的过程之后,老师还会对学生提出一定的要求,要求学生对现有的机器人进行改造,使学生用同样的机器人部件,进过改进和设计,来完成其他不同的任务。
智能机器人语音控制系统的设计
智能机器人语音控制系统的设计摘要语音识别技术是当今世界的研究热点之一,一直受到学术界和企业的普遍关注,语音识别技术的应用对于智能机器人的实用化会取到巨大的作用。
同时,通过智能机器人这一平台,也可以更好的研究语音技术的实用化问题,从而使之得到更广泛的运用。
本系统的设计的目的就是为了方便人机交互,论文首先介绍了智能机器人语音识别技术的发展历程,并分析了影响机器人语音识别的主要因素。
然后详细介绍了语音识别的原理以及在语音信号处理过程中采用的分析方法和技术。
接着介绍了芯片SPCE061A 单片机的特点,并以此芯片为主控芯片建立起了语音控制系统的硬件结构,并编写了相应的程序。
最后,通过对系统进行了调试和仿真得出结论:该机器人采用语音识别对机器人进行控制,可以完成向前走、倒退、左转、右转、停止、发射等功能。
关键字:SPCE061A单片机;机器人;语音识别;调试和仿真THE DESIGN OF SPEECH-CONTROLLEDINTELLIGENT ROBOT SYSTEMABSTRACTSpeech recognition technology is one of the focus of today's world, has been the general concern of academia and business.Speech recognition technology for intelligent robots will be practical to take a great role. Meanwhile, the intelligent robot platform can better study the practical problems speech technology, thus making it more widely used.The purpose of this design is to facilitate human-computer interaction. First the paper introduces the development process of the intelligent robot voice recognition technology, and analyzes the impact of the main factors to the robot speech recognition. Then it introduces the principle of speech recognition and speech signal processing methods and techniques used in analysis. And then it describes the characteristics of the chip microcomputer SPCE061A, and to establish a voice control system hardware structure of this system,compiled the corresponding program. Finally, the system was debugged and simulated.The conclusion is that the robot speech recognition to control the robot can be done forward, backward, turn left, turn right, stop, firing and other functions.Key word : SPCE061A MCU;robotics;peech recognition;debugging and simulation目录1 绪论 (1)1.1课题研究背景 (1)1.2智能机器人概述及现状 (2)1.2.1 智能机器人概述 (2)1.2.2 智能机器人发展方向 (3)1.3语音识别技术的概述 (5)1.4语音识别的发展历史 (5)1.4.1 国外研究历史及现状 (5)1.4.2 国内研究历史及现状 (6)1.5语音识别技术的前景和应用 (7)1.6影响智能机器人语音识别系统设计的主要因素 (8)1.7论文主要研究内容 (9)2 语音识别原理和设计采用方案 (10)2.1语音识别的分类 (10)2.2语音识别基本原理 (10)2.3语音信号预处理 (11)2.4特征量的提取 (12)2.4.1 线性预测分析 (13)2.4.2 倒谱分析 (15)2.5模式匹配及模型训练技术 (15)2.6本设计选用的方案 (16)2.6.1 系统采用的芯片 (16)2.6.2 系统采用的语音识别算法 (17)3 智能机器人语音控制系统硬件电路设计 (19)3.1设计总体方案 (19)3.2SPCE061A单片机的主要特点 (20)3.3电源模块 (21)3.4MIC输入模块 (22)3.5语音输出模块 (23)3.6超声波传感模块 (23)3.7通信模块 (24)3.8机器人动作模块 (25)4 智能机器人语音控制系统软件设计 (27)4.1设计总体方案 (27)4.2语音识别模块 (29)4.3语音训练模块 (30)4.4语音播放模块 (31)4.5机器人动作模块 (32)5 系统调试及仿真 (33)5.1系统调试 (33)5.1.1 硬件调试 (33)5.1.2 软件调试 (33)5.2系统仿真 (34)5.3结论 (35)参考文献 (36)致谢 (37)附录设计源程序 (38)附件:附件1 开题报告(文件综述)附件2 译文及原件影印件1 绪论1.1 课题研究背景随着现代科学技术和计算机技术的发展,人们在与计器的信息交流中,需要一种更加方便、自然的方式。
(完整word版)工业机器人结构设计
1绪论1.1工业机器人概述工业机器人由操作机(机械本体)、控制器、伺服驱动系统和检测传感装置构成,是一种仿人操作,自动控制、可重复编程、能在三维空间完成各种作业的机电一体化自动化生产设备。
特别适合于多品种、变批量的柔性生产。
它对稳定、提高产品质量,提高生产效率,改善劳动条件和产品的快速更新换代起着十分重要的作用。
机器人技术是综合了计算机、控制论、机构学、信息和传感技术、人工智能、仿生学等多学科而形成的高新技术,是当代研究十分活跃,应用日益广泛的领域.机器人应用情况,是一个国家工业自动化水平的重要标志。
机器人并不是在简单意义上代替人工的劳动,而是综合了人的特长和机器特长的一种拟人的电子机械装置,既有人对环境状态的快速反应和分析判断能力,又有机器可长时间持续工作、精确度高、抗恶劣环境的能力。
从某种意义上说它也是机器进化过程的产物,它是工业以及非工业领域的重要生产和服务性设备,也是先进制造技术领域不可缺少的自动化设备。
机械手是模仿人手的部分动作,按给定程序、轨迹和要求实现自动抓取、搬运或操作的自动机械装置。
在工业生产中应用的机械手被称为“工业机械手”。
工业机械手可以提高生产的自动化水平和劳动生产率;可以减轻劳动强度、保证产品质量、实现安全生产,尤其在高温、高压、低温、低压、粉尘、易爆、有毒气体和放射性等恶劣的环境中,由它代替人进行正常的工作,意义更为重大.因此,工业机械手在机械加工、冲压、铸、锻、焊接、热处理、电镀、喷漆、装配以及轻工业、交通运输业等方面得到越来越广泛的应用.工业机械手的结构形式开始比较简单专用性较强,仅为某台机床的上下料装置,是附属于该机床的专用机械手。
随着工业技术的发展,制成了能够独立的按程序控制实现重复操作,适用范围比较广的“程序控制通用机械手”,简称通用机械手。
由于通用机械手能很快的改变工作程序,适应性较强,所以它在不断变换生产品种的中小批量生产中获得广泛的应用。
1.2工业机器人的组成和分类1。
智能机器人设计与制作流程
智能机器人设计与制作流程
1.需求分析阶段:
在这个阶段,我们需要与客户或用户进行沟通,了解他们对智能机器
人的需求和期望。
根据用户的要求,确定智能机器人的功能、形态、性能
指标等。
2.机械结构设计阶段:
在这一阶段,我们将根据用户需求和机器人的功能要求设计机械结构,包括机器人的外形设计、关节设计、传动系统设计等。
通过CAD软件进行
实体建模和装配仿真,确保机械结构的可行性和稳定性。
3.电气电子系统设计阶段:
在这个阶段,需要设计机器人的电气电子系统,包括分析和选择传感器、执行机构、电源管理等。
设计电路板,包括主控制板、电源板和驱动
控制板等,并进行电路仿真和布线。
4.软件开发阶段:
在这个阶段,需要进行机器人的软件开发。
根据功能需求设计机器人
的控制算法、运动规划算法等。
将控制算法实现到嵌入式系统中,编写底
层驱动程序和上层应用程序。
5.整体集成与测试阶段:
在这个阶段,将机械结构和电气电子系统进行整体集成,并进行相应
的测试与调试。
这包括机械结构的组装、连接电路板、安装软件程序等。
通过测试和验证,确保机器人的各功能正常工作。
6.优化和改进阶段:
在机器人的实际使用中,可能会发现一些问题或需要改进的地方。
在这个阶段,需要对机器人进行优化和改进,提高机器人的性能和稳定性。
以上是智能机器人设计与制作的大致流程概述,实际工作中可能还需要根据具体情况进行调整和迭代。
设计与制作一个智能机器人需要多个领域的知识和技术的综合运用,需要团队间的密切合作和高度配合。
机器人设计与制作课程设计报告-概述说明以及解释
机器人设计与制作课程设计报告-概述说明以及解释1.引言1.1 概述概述部分的内容可按照以下方向进行展开:机器人设计与制作课程是一门以培养学生对机器人基本原理和制作技术的综合能力为目标的课程。
随着科技的飞速发展和人工智能的兴起,机器人技术在日常生活、工业生产和服务领域的应用越来越广泛。
因此,培养学生对机器人设计与制作的知识和技能已成为当前高校教育的重要任务之一。
机器人设计与制作课程的目的是通过理论与实践相结合的方式,引领学生系统地学习机器人的基本概念、原理和构造,并通过实际动手制作机器人的过程,培养学生的创新思维、团队协作和问题解决能力。
该课程将涵盖机器人技术的基础知识、电路原理、机械结构设计、传感器应用、控制系统等方面的内容,通过理论学习和实验实践相结合的方式,帮助学生全面掌握机器人设计与制作的基本技能和方法。
本课程的学习内容将根据学生的专业背景和兴趣进行适当调整。
对于计算机科学类专业的学生,课程将注重机器人的编程和智能控制;对于电子信息类专业的学生,课程将注重机器人电路原理和传感器应用;对于机械设计类专业的学生,课程将注重机器人的机械结构设计和运动学分析。
通过有针对性的学习内容,使学生能够在自己的专业领域中更好地应用机器人技术。
通过本课程的学习,学生将不仅能够掌握机器人的基本知识和技能,还能够培养创新思维、动手实践和团队合作能力。
这将为他们将来的学习和工作提供坚实的基础,使他们能够在机器人相关领域中发挥重要作用。
总之,机器人设计与制作课程旨在培养学生对机器人技术的全面了解和应用能力,为他们的综合素质和职业发展打下坚实基础。
本报告将详细介绍该课程的教学内容、学习目标以及未来的发展展望,希望能够为机器人教育的实施提供有效的参考和指导。
1.2 文章结构文章结构部分的内容可以包括以下内容:文章结构部分的目的是为读者提供对整篇报告的概览,以帮助他们更好地理解报告的内容和组织结构。
本报告按照以下结构进行组织:1. 引言部分:在这一部分,我们将对机器人设计与制作课程进行概述,并介绍本报告的目的。
(完整word版)工业机器人机械结构设计.
河南理工大学本科毕业设计(论文开题报告题目名称工业机器人机械结构设计一、选题的目的和意义:工业机器人在工业生产中能代替人做某些单调、频繁和重复的长时间作业,或是危险、恶劣环境下的作业,例如在冲压、压力铸造、热处理、焊接、涂装、塑料制品成形、机械加工和简单装配等工序上,以及在原子能工业等部门中,完成对人体有害物料的搬运或工艺操作。
广泛采用工业机器人,不仅可提高产品的质量与产量,而且可以保障人身安全,改善劳动环境,减轻劳动强度,提高劳动生产率,节约原材料消耗以及降低生产成本。
因此,研究和设计各种用途的机器人特别是工业机器人、推广机器人的应用是有现实意义的。
由于工业机器人具有一定的通用性和适应性,能适应多品种中、小批量的生产, 70年代起,常与数字控制机床结合在一起,成为柔性制造单元或柔性制造系统的组部分。
二、国内外研究综述:20世纪50年代末,美国在机械手和操作机的基础上,采用伺服机构和自动控制等技术,研制出有通用性的独立的工业用自动操作装置,并将其称为工业机器人; 60年代初,美国研制成功两种工业机器人,并很快地在工业生产中得到应用; 1969年,美国通用汽车公司用21台工业机器人组成了焊接轿车车身的自动生产线。
此后,各工业发达国家都很重视研制和应用工业机器人。
我国工业机器人起步于70年代初期,经过20多年的发展,大致经历了3个阶段: 70年代的萌芽期, 80年代的开发期和90年代的适用化期。
我国工业机器人经过20多年的发展已经初具规模。
目前我国已生产出部分机器人关键元器件,开发出弧焊、点焊、码垛、装配、搬运、注塑、冲压、喷漆等工业机器人。
一批国产工业机器人已服务于国内诸多企业的生产线上;一批机器人技术的研究人才也涌现出来。
一些相关科研机构和企业已掌握了工业机器人操作机的优化设计制造技术;工业机器人控制、驱动系统的硬件设计技术;机器人软件的设计和编程技术;运动学和轨迹规划技术;弧焊、点焊及大型机器人自动生产线与周边配套设备的开发和制备技术“乘机安全小贴士”安全出行要重视等。
智能机器人设计与制作流程
智能机器人设计与制作流程1.需求分析:首先,需要明确定义智能机器人的功能和应用场景。
根据需求,确定机器人应具备的功能,例如语音识别、视觉感知、路径规划、人机交互等。
2.结构设计:根据机器人的功能和应用场景,设计机器人的整体结构。
结构设计包括机械结构、电子电路和软件架构等方面。
需要考虑机器人的机械稳定性、电路布局和外观设计等因素。
3.硬件选择:根据需求和结构设计,选择适合的硬件组件。
例如,选择合适的控制板、传感器、执行器等。
同时,需要考虑硬件的兼容性和性能要求,确保硬件组件能够满足机器人的功能需求。
4.软件开发:根据机器人的功能需求,进行软件开发。
软件开发包括嵌入式软件和上位机软件两个方面。
嵌入式软件用于控制硬件和实现机器人的基本功能,上位机软件用于与机器人进行交互和控制。
5.系统调试:在软硬件开发完成后,进行系统调试。
包括硬件连接调试、驱动测试、传感器校准、电源管理、通信协议等方面的调试工作。
通过系统调试,确保机器人各个组件能够正常工作。
6.功能测试:完成系统调试后,进行功能测试。
对机器人的各个功能模块进行测试,验证其是否满足需求。
例如,在语音识别方面,测试机器人对于不同语音命令的识别准确度。
在视觉感知方面,测试机器人对于不同物体的识别和追踪能力。
7.性能优化:根据测试结果,对机器人的性能进行优化。
通过改进算法、调整参数和优化硬件组件等手段,提升机器人的性能和稳定性。
8.上线部署:当机器人的设计和制作工作完成后,可以进行上线部署。
将机器人投放到实际的使用环境中,让用户进行测试和反馈。
同时,根据用户反馈,对机器人进行优化和改进。
以上是一个智能机器人设计与制作的基本流程。
在实际的设计和制作过程中,可能还会存在其他因素和环节,需要根据具体情况进行调整和扩展。
智能机器人设计与制作的成功与否,不仅取决于每个环节的质量,还需要各个环节的紧密协作和高效沟通。
【下载】小型智能机器人制作全攻略4版
【下载】小型智能机器人制作全攻略4版第一部分机器人制作中的科学与技术 1第1章欢迎来到机器人的精彩世界 21.1 制作机器人的乐趣 21.2 为什么制作机器人 31.2.1 机器人技术是现代科技的基石 31.2.2 机器人技术可以作为职业生涯的一块敲门砖 4 1.2.3 机器人救援技术 41.2.4 最重要的一点,机器人实在是太好玩了 41.3 模块化制作方式 41.4 成本更低,机器人更好 51.5 需要掌握的技术 51.5.1 电子学背景 61.5.2 编程经验 71.5.3 机械经验 71.5.4 手工技能 71.5.5 两个非常重要的技能 71.6 自制、套件或者成品 81.6.1 自己制作 81.6.2 成品机器人 81.6.3 套件或零件 81.6.3.1 VE×机器人设计系统 91.6.3.2 Lynxmotion舵机制作套件 91.6.3.3 Bioloid机器人套件 91.6.3.4 Pitsco/FIRST机器人FTC套件 91.6.4 与你的技能相称的项目 101.7 像机器人设计师那样思考 10第2章机器人的构造 112.1 固定与移动式机器人 112.2 自动与遥控式机器人 122.3 人工与自主机器人 132.4 那么,机器人到底是什么 132.5 机器人的身体 142.5.1 机器人的尺寸、形状和样式 14 2.5.1.1 乌龟或桌面机器人 142.5.1.2 小车机器人 152.5.1.3 步行机器人 152.5.1.4 手臂和夹持器 162.5.1.5 机器人和类人型机器人 162.5.2 骨骼结构 172.5.3 骨头和肉——木头、塑料或金属 18 2.6 运动系统 192.6.1 车轮 192.6.2 履带 202.6.3 腿 202.7 动力系统 212.7.1 电池的种类 212.7.2 其他动力来源 212.8 传感器 212.8.1 触觉 222.8.2 光线和声音 222.8.3 嗅觉和味觉 232.8.4 遥感 232.8.5 倾斜、运动、定位 232.9 输出设备 232.10 “机器人”名称的由来 24第3章准备材料 253.1 电子配套材料商店 253.2 在线电子经销商 263.3 使用查找元件 26 3.4 专业在线机器人零售商 273.5 业余爱好和模型商店 273.6 工艺用品商店 273.7 五金和家装材料商店 283.8 电子制造商的样品 283.9 上网查找你需要的材料 293.10 有计划的一次性采购 293.11 令人难忘的剩余物资商店 30 3.12 从专业商店购买材料 303.13 回收:利用现有资源 313.14 做事情有条理 323.14.1 小材料的收纳柜 323.14.2 大型储存柜 333.14.3 工具箱和背包 333.14.4 保管好你的存货清单 333.14.5 特别的储存方案 34第二部分制作机器人 35第4章安全第一(永远放在首位) 36 4.1 操作安全 364.2 电池安全 374.3 焊接安全 374.4 防火安全 374.5 防止静电损害 384.5.1 静电放电的问题 384.5.2 使用防静电腕带 384.5.3 保存静电敏感元件 394.5.3.1 合适的服装可以减小静电 39 4.5.3.2 使用接地的焊接工具 404.6 用电安全 404.7 急救 404.7.1 眼睛伤害的急救 404.7.2 电击伤害的急救 414.8 利用常识,并享受你的爱好 41第5章制作机器人的身体——基本知识 42 5.1 选择合适的制作材料 425.1.1 木头 435.1.2 塑料 435.1.3 金属 445.1.4 轻质复合材料 455.2 评论:选择正确的材料 455.3 用“身边”的材料制作机器人 465.4 制作机器人的基本工具 465.4.1 卷尺 465.4.2 螺丝刀 475.4.3 锤子 475.4.4 钳子 475.4.5 钢锯 475.4.6 电钻 485.4.7 钻头 485.4.8 螺丝批头 495.4.9 雕刻刀 495.4.10 套筒螺丝刀 495.5 可选工具 495.6 五金用品 505.6.1 螺丝和螺母 505.6.2 垫片 505.6.3 支架 505.7准备一个工作室 51第6章机械加工技术 526.1 重中之重:眼镜与耳朵的保护 52 6.2 计划、起草、测量、标记 52 6.3 材料的钻孔 536.3.1 选择正确的钻头 536.3.2 选择合适的速度 546.3.3 保养好钻头的卡盘 546.3.4 控制钻孔的深度 556.3.5 钻孔的垂直校正 566.3.6 使用夹具和台钳 566.3.7 钻孔窍门 566.4 材料的切割 576.4.1 注意安全 576.4.2 使用锯的窍门 586.4.3 限制切割深度 586.4.4 其他金属切割方法 596.5 使用手持电动工具 596.5.1 工具的安全 596.5.2 工具的保养 606.5.3 使用常识 606.6 使用气动工具提高工作效率 60 第7章木头的加工 617.1 硬木和软木的区别 617.2 木板与胶合板 617.2.1 使用胶合板 627.2.2 使用木板 637.2.3 常见木板规格 637.2.4 中密度纤维板 637.3 木工技巧 647.3.1 切割一个底盘 647.3.1.1 多边形底盘的加工 647.3.1.2 去除更多的角 657.3.1.3 制作轮框 667.3.2 框架的切割 677.3.2.1 正确的测量 687.3.2.2 组装框架 687.3.3 木头的钻孔 697.3.3.1 使用垫板 697.3.3.2 调节钻孔的速度 697.3.4 木头的打磨 707.3.4.1 粗磨和休整 707.3.4.2 砂纸 707.3.4.3 油漆 70第8章制作木制结构的移动平台 71 8.1 制作底盘 718.1.0 切割和钻孔 728.2 安装电动机 738.3 安装车轮 748.4 安装球形万向轮 758.5 PlyBot的使用 758.6 其他方式 76第9章塑料的加工 779.1 常见塑料的种类 779.2 最适合用于机器人的塑料 78 9.3 哪里去买塑料 799.4 硬质发泡PVC的特性 799.4.1 发泡PVC的优点 799.4.2 选择板材的厚度 809.5 怎么切割塑料 809.5.1 裁切技巧 819.5.2 用锯切割 819.6 怎么给塑料钻孔 829.6.1 先定位再扩孔 829.6.2 电动工具的转速 829.7 制作塑料底盘 829.7.1 参考木制底盘的设计 839.7.2 直线切割制作底盘 839.8 制作塑料框架 849.9 如何使塑料弯曲定型 859.10 如何将塑料的边沿打磨光滑 85 9.11 如何黏合塑料 859.11.1 使用液状黏合剂 869.11.2 使用家用黏合剂 869.12 使用热胶枪加工塑料 879.13 如何给塑料上漆 879.14 家用塑料制品制作机器人 87第10章制作塑料结构的移动平台 89 10.1 制作底盘 8910.2 安装电动机 9110.3 安装车轮 9210.4 安装球形万向轮 9210.5 使用PlastoBot 9210.6 更改PlastoBot的设计 93第11章金属的加工 9511.1 适合制作机器人的金属种类 95 11.1.1 铝 9511.1.2 钢 9511.1.3 铜 9611.1.4 锌和锡 9611.2 测量金属的厚度 9611.3 什么是热处理 9711.4 哪里去买金属材料 9811.5 机器人常用金属 9811.6 家装商店里的金属材料 9911.6.1 铝型材 9911.6.2 加强板 9911.6.3 钢管和角铁 10011.6.4 EMT管子 10011.7 工艺和业余爱好商店里的金属材料 101 11.8 金属加工技术 10111.8.1 切割底盘 10211.8.2 切割厚金属板 10311.8.3 切割薄金属板 10311.8.4 切割框架 10311.8.4.1 使用短锯和斜锯架 10411.8.4.2 制作箱式框架 10411.8.5 给金属钻孔 10411.8.5.1 冲定位坑 10511.8.5.2 使用钻孔油 10511.8.5.3 使用钻床 10511.8.5.4 给金属攻丝 10511.8.6 弯曲金属 10611.8.7 修整金属 10711.8.7.1 使用金属锉 10711.8.7.2 使用砂纸 10711.8.7.3 金属上漆 108第12章制作金属结构的移动平台 109 12.1 制作底盘 10912.1.1 准备材料 11012.1.2 钻孔 11112.1.3 组装条带和钉接板 11212.1.4 安装舵机支架 11212.1.5 安装万向轮 11312.1.6 安装舵机和车轮 11312.2 使用TinBot 114第13章装配技术 11513.1 螺丝、螺母和其他紧固件 115 13.1.1 紧固件的尺寸 11613.1.1.1 英制 11613.1.1.2 公制 11613.1.2 木螺丝和金属自攻螺丝 116 13.1.3 螺丝头部的样式 11713.1.4 螺丝刀的样式 11713.1.5 螺母 11813.1.6 垫片和它们的用法 118 13.1.7 紧固件的材料 11913.1.8 紧固件的购买 11913.1.9 攻出螺纹 12013.2 支架 12013.2.1 镀锌钢板支架 12013.2.2 塑料支架 12113.3 黏合剂的选择和使用 121 13.3.1 接合与定型 12213.3.2 家用胶水 12213.3.2.1 PVAc(聚醋酸乙烯) 122 13.3.2.2 硅酮 12213.3.2.3 接触黏合剂 12213.3.2.4 液状黏合剂 12313.3.3 使用家用胶水 12313.3.4 双份环氧树脂黏合剂 123 13.3.4.1 环氧树脂特别在哪里 12313.3.4.2 使用双份环氧树脂 12413.3.5 你、机器人和超级胶水 12413.3.6 使用热熔胶 12513.3.7 用夹具或胶带固定好接合部位 125 13.3.8 接合加固的方法 12613.3.9 总结:选择合适的胶水 127第14章快速成型法 12814.1 选择轻量机器人材料 12814.1.1 加厚硬纸板,就是它 12814.1.2 空心塑料板 12914.1.3 泡沫塑料板 12914.1.4 建筑泡沫 12914.1.5 相框牛皮纸板 13014.2 基底板的切割和钻孔 13014.2.1 使用小刀进行切割 13114.2.2 使用纸板切割器 13114.3 使用临时紧固件辅助快速成型 131 14.3.1 搭扣紧固件 13214.3.2 塑料扎带 13314.3.3 胶带 13314.3.4 双面胶带 13314.3.5 电缆夹具 13414.3.6 可用于快速成型的各种黏合剂 134第15章用计算机辅助设计机器人的草图 135 15.1 规划钻孔和切割的布局 13515.1.1 手工设计布局 13515.1.1.1 直接绘制 13515.1.1.2 使用纸模板 13615.1.1.3 制作多个零件 13615.1.1.4 使用复写纸和划线器 13615.1.2 用计算机图形程序设计布局 137 15.1.2.1 矢量图是最佳的选择 137 15.1.2.2 使用Inkscape设计机器人 137 15.1.3 用低成本CAD程序设计布局 138 15.1.3.1 CAD的优点 13915.1.3.2 基本CAD功能 14015.2 矢量图形的格式 14015.3 使用激光切割服务 14115.4 金属与塑料零件的快速成型 142 第16章用玩具制作高科技机器人 143 16.1 Erector制作套件 14316.2 慧鱼(Fischertec—hnik) 144 16.3 K'NEx 14416.4 其他值得一试的制作套件 145 16.4.1 Inventa 14516.4.2 Zoob 14516.4.3 Zometool 14516.4.4 值得纪念的制作玩具 14516.5 元件拼插式制作 14616.5.1 建立永久性的连接 14616.5.2 用拼接零件组装模块 14716.6 改装机器人的特制玩具 14716.6.1 田宫 14716.6.2 OWIKIT和MOVITS 14816.7 把玩具车改装成机器人 14816.7.1 机动车辆 14916.7.2 使用车辆里面的零件 15016.7.3 零件的重新组装 150第17章用身边的材料制作机器人 152 17.1 几个寻找可用材料的思路 15217.2 尝试“免切割”金属底盘的设计 153 17.2.1 迷你T—BOT简介 15317.2.2 制作迷你T—BOT 15417.2.3 使用大号T型铁制作大机器人 155 17.2.4 木头加强用的金属片 15517.2.4.0 更多思路 15617.3 使用木头和塑料样品 15717.4 注意观察多动脑 157第三部分动力、电动机和运动 159第18章电池大全 16018.1 动力概述 16018.2 适用于机器人的电池 16118.2.1 碳—锌电池 16118.2.2 碱性电池 16118.2.3 可充电碱性电池 16118.2.4 镍—镉电池 16118.2.5 镍金属氢化物电池 16218.2.6 锂离子电池 16218.2.7 密封式铅—酸电池(SLA) 162 18.2.8 应该选择哪种电池 16318.3 了解电池的参数 16318.3.1电压 16318.3.1.1 名义上的(“标称”)电压 163 18.3.1.2 电压下降的问题 16418.3.2 容量 16518.3.2.1 用安时表示容量 16518.3.2.2 预留出一定容量 16518.3.2.3 过放电的危害 16518.3.2.4 小电池的容量 16618.3.3 了解电池的内阻 16618.3.4 了解电池的充电参数 16718.4 给电池充电 16718.5 机器人电池一览 16718.6 常见的电池尺寸 16718.7 增加电池的额定值 169第19章机器人的动力系统 17019.1 电源和电池的电路符号 17019.2 使用预制电池组 17119.2.1 使用模型预制的电池组 17119.2.2 镍镉或镍氢电池 17119.3 制作你自己的可充电电池组 17219.4 使用电池和电池仓 17319.4.1 将电池仓安装在机器人上 17319.4.2 9V电池卡扣和电池卡子 17419.4.3 用电池仓实现“中间”电压 17419.5 最好的电池布局 17519.6 电池和机器人的连接 17519.7 预防电池反接 17619.7.1 结构互锁式连接 17619.7.2 电路反接保护 17719.8 在线资源:如何给电池仓或插墙式稳压电源焊接桶形插头17719.9 加入熔丝保护 17719.10 提供多组电压 17819.10.1 单电池、单电压 17819.10.2 单电池、多组电压 17919.10.3 多组电池、多组电压 17919.10.4 多组电池、分组电压 17919.11 调整电压数值 18019.11.1 使用硅二极管降压 18019.11.2 稳压二极管的电压调整 181 19.11.3 线性稳压器 18219.11.4 开关式稳压电源 18319.11.5 使用多组电压调整 18419.12 处理电力不足的问题 18519.13 电池电压监视器 185第20章让机器人动起来 18620.1 选择一种运动系统 18620.2 轮式运动 18720.2.1 差速运动 18720.2.2 车式转向 18820.2.3 三轮车式转向 18920.2.4 全方位转向 18920.2.4.1 全方位转向是如何实现的 190 20.2.4.2 其他结构的全方位转向 191 20.3 履带式运动 19120.4 腿式运动 19220.5 其他运动方式 19320.6 在线资源:控制机器人的重量 194 第21章选择正确的电动机 19521.1 交流电动机还是直流电动机 195 21.2 连续旋转还是步进电动机 196 21.3 舵机 19621.4 电动机参数 19721.4.1 工作电压 19721.4.2 电流消耗 19721.4.3 转速 19821.4.4 转矩 19821.4.5 失速或额定转矩 19921.4.6 判断电动机的转矩 19921.5 测量电动机的电流消耗 20021.5.1 直接测量电动机电流 20021.5.2 间接测量电动机的电流 20221.6 处理电压下降的问题 20221.7 消除电噪声 203第22章使用直流电动机 20522.1 直流电动机的原理 20522.1.1 永磁直流电动机:经济实惠,使用方便 205 22.1.2 转向可逆 20622.2 评论直流电动机的参数 20722.3 控制直流电动机 20722.4 用开关控制电动机 20722.4.1 用开关实现简单的开/关控制 20822.4.2 用开关控制转向 20822.5 用继电器控制电动机22.5.1 继电器的内部结构 20922.5.2 简单的继电器开关控制 21022.5.3 用继电器控制方向 21022.5.4 创建一个继电器半桥 21122.5.5 继电器的额定电流 21222.5.6 简易继电器驱动电路 21222.6 用双极型晶体管控制电动机 21322.6.1 基本的晶体管电动机控制 21422.6.2 双向晶体管控制 21522.7 用功率场效应晶体管控制电动机 21522.7.1 基本的MOSFET电动机开关 21622.7.2 使用场效应晶体管的电动机H桥 216 22.7.3 常见晶体管H桥的设计要点 21722.8 用双向模块控制电动机 21822.8.1 使用l293d和754410电动机驱动IC 21922.8.2 附加项目:使用L298电动机驱动IC 22022.8.3 “智能”双向电动机控制模块 22022.9 控制直流电动机的速度 22122.9.1 不应该采取的方法 22122.9.2 基本速度控制 22122.10 附加项目:电动机控制模块的接口电路 222第23章使用舵机 22323.1 遥控舵机的工作原理 22323.1.1 内部结构 22423.1.2 旋转限位 22523.2 R/C舵机的控制信号 22523.2.1 脉冲同样控制着速度 22623.2.2 脉冲宽度范围的变化 22623.3 电位器的作用 22723.4 特殊用途的舵机类型和尺寸 22723.5 齿轮机构和输出力度 22723.6 输出轴的轴衬或轴承 22823.7 典型舵机参数 22823.8 连接器的类型和配线 22923.8.1 连接器的类型 22923.8.2 引出线 23023.8.3 彩色编码 23023.8.4 用排插配合连接器 23023.9 模拟与数字舵机 23123.10 舵机的控制电路 23123.10.1 用单片机控制舵机 23223.10.2 使用串行舵机控制器 23323.10.3 附加项目:使用LM555时基IC控制舵机,以及更多方法23323.10.4 使用超过7.2V的电压 23323.10.5 处理和避免“死区”问题 23323.11 使用连续旋转的舵机 23423.12 把标准舵机改造成可以连续旋转的舵机 234 23.12.1 改造舵机的方法 23523.12.2 基本改造说明 23523.12.3 你需要的工具 23523.12.4 选择要改造的舵机 23623.12.5 改造HitechS—422的步骤 23623.12.6 改造FUTABAS3003舵机的步骤 238 23.12.7 测试改造好的舵机 23823.12.8 改造舵机的局限性 23823.13 用舵机控制传感器转台 239第24章安装电动机和车轮 24024.1 安装直流电动机 24024.1.1 使用安装孔 24024.1.2 使用自带的底座 24124.1.3 使用支架 24124.1.3.1 金属支架 24224.1.3.2 木头或塑料支架 24224.1.3.3 使用夹具 24324.2 用铝槽管安装和校准电动机的位置 243 24.3 安装R/C舵机 24324.3.1 用螺丝安装舵机 24424.3.1.1 特制的舵机安装板 24424.3.1.2 只做你自己的舵机安装板 24424.3.1.3 舵机的“支撑”式安装支架 24524.3.2 用黏合剂固定舵机 24524.4 在轴上安装传动元件 24524.4.1 压接 24524.4.2 螺丝固定 24624.4.3 专门设计的互锁机构 24624.4.4 舵盘 24624.4.5 黏合剂 24624.5 车轮与直流减速电动机的安装 246 24.5.1 使用配套的电动机和车轮 24724.5.2 制作定制车轮 24724.5.2.1 车轮和固定螺丝 24724.5.2.2 使用法兰盘 24824.6 车轮与舵机的安装 24824.6.1 和舵机配套的车轮 24824.6.2 制作和舵机配套的车轮 24824.7 给舵机安装联动机构 24924.7.1 控制直线运动 25024.7.2 增加润滑 25024.8 机器人的传动元件 25024.9 使用刚性和柔性轴连器 25224.9.1 购买现成的轴连器 25224.9.2 制作你自己的刚性轴连器 25324.9.2.1 用管型材制作轴连器 25324.9.2.2 用立柱或螺纹接头制作轴连器 254 24.9.3 制作你自己的柔性轴连器 25524.10 不同轴型的用法 25524.11 你需要了解的一些齿轮方面的知识 256 24.11.1 齿轮入门 25624.11.2 齿轮是圆形的杠杆 25724.11.3 建立齿轮减速 25724.11.4 齿轮齿的种类 25824.11.5 常见齿轮规格 25924.11.6 使用带有减速齿轮的电动机 259 24.11.7 哪里可以找到齿轮 259第25章用形状记忆合金控制机器人的运动 261 25.1 形状记忆合金与机器人技术 26125.2 形状记忆合金基础知识 26125.3 使用形状记忆合金 26225.3.1 终结器 26225.3.2 力矩偏置 26325.3.3 控制电路 26325.4 用单片机控制形状记忆合金 26425.5 试验SMA机械装置 26625.6 使用现成的SMA机械装置 266……第四部分常见机器人项目 269第五部分机器人电子学 331第六部分计算机与电子控制 387第七部分微控制器构成的大脑 421第八部分传感器、导航和反馈 501附录A RBB技术支持网站 614网站内容 614后备技术支持网站 614特殊材料和网站资源 614附录B 在线材料资源 616机器人技术 616电子学 617模型 618论坛和博客 618更多在线资源 618附录C 机械参考 619十进制小数 619钻头和丝锥的尺寸——英制 620钻头和丝锥的尺寸——公制 620钻头的数字与分数英寸对照表 621紧固件:英制螺纹标准一览 621十进制英寸、分数英寸、Mil与Gauge(以铝板为例)的对照表622上网获得更多信息 622附录D 电子参考 623公式 623欧姆定律 623电阻的计算 623计算两个电阻并联 624缩写 624六种最常见的电子计量单位 627电阻色环 628电阻色环编码表 628导线规格 628。
智能机器人制作【全过程】
智能机器人制#include <reg51.h>#define uchar unsigned char#define uint unsigned int/********************端口定义*****************************/ sbit IN1=P1^0; //电机控制端口//sbit IN2=P1^1; //电机控制端口//sbit IN3=P1^2; //电机控制端口//sbit IN4=P1^3; //电机控制端口//sbit LN=P2^0; //红外探测端口//sbit LW=P2^1; //红外探测端口// sbit RW=P2^2; //红外探测端口// sbit RN=P2^3; //红外探测端口///*****************子函数声明****************************/ void ahead(void); //前进void left(void); //左转void right(void); //右转void stop(void); //停止main() {while(1){if(RN==1&&LN==1&&RW==1&&LW==1) {ahead(); continue;}if((RN==0||LN==0)&&RW==1&&LW==1) {right(); continue;}if(RN==1&&LN==1&&(RW==0||LW==0)) {left(); continue;}if(RN==0&&LN==0&&RW==0&&LW==0) stop();} } void ahead(){IN2=1;IN3=0;IN4=1;}void left(){IN1=0;IN2=0;IN3=0;IN4=1;} void right(){IN1=0; IN2=1;IN3=0;IN4=0;void stop() { IN1=0; IN2=0; IN3=0; IN4=0; }5.功能模块介绍5.1电源模块供电系统的原理图如下 7805INPUT OUTPUT INPUT OUTPUT 780612v 单片机及模块供电电机供电7805的5V 输出给单片机以及各个功能模块供电,在实际应用过程中我们可能需要好几块7805,但是我们要注意的是:各个7805之间的输出绝对不能够并联。
智能机器人设计制作
智能机器人设计制作课程设计报告一、设计目的用MT-U机器人小车平台,加装相应传感器并编程,实现智能控制至少包含以下功能:2.1 具有制定速度的前进、后退、停止。
2.2 具有避障能力2.3 具有转向功能2.4 具有定距离行走控制二、设计任务通过机器人的I/O口控制机器人在规定速度下完成前进、后退、壁障、转向、定距离行走的功能。
三、MT-UROBOT的内部结构3.1 MT-UROBOT结构简图:3.2MT-UROBOT主要控制按钮和相关系统接口如下图所示。
控制按键部分左图相关控制接口和控制开关电源开关按钮控制MT-UROBOT电源开关的按钮,按此按钮可以打开或关闭机器人电源。
“充电口”将充电器的相应端插入此口,再将另一端插到电源上即可对机器人充电下载口用于下载程序到机器人主板上,使用时只需将串口连接线的相应端插入下载口,另一端与计算机连接好,这样机器人与计算机就连接起来了。
备用电源此电源接口可以接外接电源,主要作用是为电机提供电源。
在系统运行过程中,电机做功功率消耗掉大部分的电池能量,为了提高系统的连续运行时间,可以为电机提供外部动力,当备用电源接口上接有外部电源时,将切换开关拨至左边,电机就可以从外接电源那里取电。
切换开关电机使用内部电源或者外接电源的选择开关。
右图相关控制接口和控制开关指示灯绿色灯为电源指示灯,按下MT-UROBOT的开关后,这个灯会发绿光。
红色灯为电源欠压指示灯,当机器人电源电压不足时,欠压报警的红灯亮,这时就该给机器人充电了。
“通信”指示灯“通信”指示灯位于机器人主板的前方,与电源绿色指示灯为同一个灯,在给MT-UROBOT下载程序时,这个绿灯会闪烁,这样就表明下载正常,程序正在进入机器人的“大脑”即CPU。
“充电”指示灯充电指示灯不在控制盒上,在充电器上。
当你给机器人充电时,充电器上的指示灯发红光,充电完成后充电器上指示灯发绿光。
UP、DOWN、OK按钮UP和DOWN用来选择机器人开机后将要执行的动作,可以在液晶显示屏上观察,OK相当于PC机的ENTER键,用来进入某一功能。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
智能机器人的设计与制作WORD版本可编辑
智能机器人的设计与制作
引言
近几年机器人已成为高技术领域内具有代表性的战略目标。
机器人技术的出现和发展,不但使传统的工业生产面貌发生根本性变化,而且将对人类社会产生深远的影响。
随着社会生产技术的飞速发展,机器人的应用领域不断扩展。
从自动化生产线到海洋资源的探索,乃至太空作业等领域,机器人可谓是无处不在。
目前机器已经走进人们的生活与工作,机器人已经在很多的领域代替着人类的劳动,发挥着越来越重要的作用,人们已经越来越离不开机器人帮助。
机器人工程是一门复杂的学科,它集工程力学、机械制造、电子技术、技术科学、自动控制等为一体。
目前对机器人的研究已经呈现出专业化和系统化,一些信息学、电子学方面的先进技术正越来越多地应用于机器人领域。
目前机器人行业的发展与30 年前的电脑行业极为相似。
今天在汽车装配线上忙碌的一线机器人,正是当年大型计算机的翻版。
而机器人行业的利基产品也同样种类繁多,比如协助医生进行外科手术的机械臂、在伊拉克和阿富汗战场上负责排除路边炸弹的侦察机器人、以及负责清扫地板的家用机器人,还有不少参照人、狗、恐龙的样子制造机器人玩具。
舞蹈机器人具有人类外观特征、可爱的外貌、又兼有技术含量,极受青少年的喜爱。
我从前年开始机器人方面的研究,在这过程中尝试过很多次的失败,也感受到了无比的乐趣。
图1.1、机器人
1 绪论
机器人技术作为20 世纪人类最伟大的发明之一,自20 世纪60 年代初问世以来,经历40 余年的发展已取得长足的进步。
未来的机器人是一种能够代替人类在非结构化环境下从事危险、复杂劳动的自动化机器,是集机械学、力学、电子学、生物学、控制论、计算机、人工智能和系统工程等多学科知识于一身的高新技术综合体。
走向成熟的工业机器人,各种用途的特种机器人的多用化,昭示着机器人技术灿烂的明天。
1.1 国内外机器人技术发展的现状
为了使机器人能更好的应用于工业,各工业发达国家的大学、研究机构和大工业企业对机器人系统开发投入了大量的人力财力。
在美国和加拿大,各主要大学都设有机器人研究室,麻省理工学院侧重于制造过程机器人系统的研究,卡耐基—梅隆机器人研究所侧重于挖掘机器人系统的研究,而斯坦福大学则着重于系统应用软件的开发。
德国正研究开发“MOVE AND PLAY”机器人系统,使机器人操作就像人们操作录像机、开汽车一样。
从六十年代开始日本政府实施一系列扶植政策,使日本机器人产业迅速发展起来,经过短短的十几年。
到80 年代中期,已一跃而为“机器人王国”。
其机器人的产量和安装的台数在国际上跃居首位。
按照日本产业机器人工业会常务理事米本完二的说法:“日本机器人的发展经过了60 年代的摇篮期。
70 年代的实用期。
到80 年代进人普及提高期。
”
并正式把1980 年定为产业机器人的普及元年”。
开始在各个领域内广泛推广使用机器人。
中国机器人的发展起步较晚,1972 年我国开始研制自己的工业机器人。
"七五"期间,国家投入资金,对工业机器人及其零部件进行攻关,完成了示教再现式工业机器人成套技术的开发,研制出了喷涂、点焊、弧焊和搬运机器人。
1986 年国家高技术研究发展计划(863 计划)开始实施,智能机器人主题跟踪世界机器人技术的前沿,经过几年的研究,取得了一大批科研成果,成功地研制出了一批特种机器人。
20 世纪90 年代,我国的工业机器人又在实践中迈进一大步,先后研制出了点焊、装配、喷漆、切割、搬运等各种用途的工业机器人,并实施了一批机器人应用工程,形成了一批机器人产业化基地,为我国机器人产业的腾飞奠定了基础。
1.2 机器人技术的市场应用
机器人融入我们日常生活的步伐有多快?据国际机器人联盟调查,2004 年,全球个人机器人约有200 万台,到2008 年,还将有700 万台机器人投入运行。
按照韩国信息通信部的计划,到2013 年,韩国每个家庭都能拥有一台机器人;而日本机器人协会预测,到2025 年,全球机器人产业的“蛋糕”将达到每年500 亿美元的规模(现在仅有50亿美元)。
与20 世纪70 年代PC 行业的情况相仿,我们不可能准确预测出究竟哪些用途将推动这个新兴行业进入临界状态。
不过看起来,机器人很可能在护理和陪伴老年人的工作上大展宏图,或许还可以帮助残疾人四处走走,并增强士兵、建筑工人和医护人员的体力与耐力。
目前,我国从事机器人研发和应用工程的单位200 多家,拥有量为3500 台左右,其中国产占20%,其余都是从日本、美国、瑞典等40 多个国家引进的。
2000 年已生产
各种类型工业机器人和系统300 台套,机器人销售额6.74 亿元,机器人产业对国民经济的年收益额为47 亿元,我国对工业机器人的需求量和品种将逐年大幅度增加。
1.3 机器人技术的前景展望机器人是人类的得力助手,能友好相处的可靠朋友,将来我们会看到人和机器人会存在一个空间里边,成为一个互相的助手
和朋友。
机器人会不会产生饭碗的问题。
我们相信不会出现“机器人上岗,工人下岗”的局面,因为人们随着社会的发展,实际上把人们从繁重的体力和危险的环境中解放出来,使人们有更好的岗位去工作,去创造更好的精神财富和文化财富,机器人来做这些危险环境的工作,展望21 世纪机器人将是一个与20 世纪计算机的普及一样,会深入地应用到各个领域,所以很多专家预测,在21 世纪的前20 年是机器人从制造业走向非制造业的发展一个重要时期,也是智能机器人发展的一个关键时期,目前国际上很多国家,也对机器人对人类社会的影响的估计提出了新的认识,同时,我们也可以看到机器人技术,涉及到多个学科,机械、电工、自动控制、计算机测量、人工智能、传感技术等等,它是一个国家高技术实力的一个重要标准。
语音识别处理是语音功能的一个重要方面,目前计算机语音识别处理过程基本上一致,是一种基于统计模式识别的理论。
我国的语音识别研究起步于五十年代,近年来发展很快,其研究水平基本与国外同步,在汉语语音识别技术上还有自己的特点和优势。
可以预计,语音技术的发展前景无限。
2 机器人设计的内容和要求
2.1 机器人设计的内容
随着现代科技的发展,机器人技术已广泛应用于人类社会生活的各个领域,特别是机器人具有人类外观特征、可爱的外貌、又兼有技术含量,极受青少年的喜爱。
本课题要求设计一具有简单人体功能的、模拟舞蹈动作的类人型机器人,完成简单人的基本动作:可以前进后退,左右侧行,左右转弯和前后摆动手臂,行走频率为每秒两步,举手投足、转圈、头部动作灵活、并具备的语音功能。
通过语音识别技术,可以对小机器人进行语音控制,通过发出语音命令,控制机器人的。
机器人包括底座、头部、上身、下肢、以及电路控制板,分别控制手臂、头部和底盘运动的电机及传动机构等。
通过电路控制和机械传动,可使机器人动作。
知识范围涉及机构学、力学、电子学、自动控制、计算机、人工智能等。
具体赋予任务:
1、深入了解类人型机器人的功能及工作要求,查找与课题有关的文献资料及参考书目;
2、学习掌握机构创新设计的基本知识和设计方法,了解控制对象舞蹈机器人的工作原理、动作过程,进行简单舞蹈动作及相应机构设计;
3、根据机器人构成、工作原理、主要特点和技术指标,分析比较,加以论证,确定机器人运动控制最终方案,完成硬件电路设计,单片机控制程序设计;
4、制作舞蹈机器人模型,完成各种运动、动作模拟,调试成功。
5、规定的翻译、论文工作。
2.2 舞蹈机器人设计的数据和要求
1、机器人身高80~120 ㎝,表演时机器人随音乐翩翩起舞,动作协调、灵活;
2、表演各种的基本动作,具体动作可自行设计。
涵盖行进、转圈、举手投足、头部等动作;
3、整套动作持续4 分钟左右;
4、机器人结构紧凑、体积小,重量轻;
5、灵活的多功能机器手臂:活动空间大,可360 度旋转。
6、采用电机驱动,运动准确可靠。