毕业设计:双容水箱系统的建模、仿真与控制
双容水箱PID液位控制系统的仿真本科生毕业设计精品推荐
双容水箱PID液位控制系统的仿真本科生毕业设计精品推荐毕业设计双容水箱液位PID控制算法的仿真研究摘要由于单回路控制系统已不能克服液位控制中的一些问题,如:大时延、非线性、容量滞后等。
因此本设计针对这些问题设计串级控制,对单回路控制系统无法控制的问题进行解决,同时比较单回路控制系统和串级控制系统的不同之处。
本次毕业设计的课题是多容水箱的PID液位控制系统的仿真。
在设计中,主要针对双容水箱进行了研究和仿真。
本文的主要内容包括:对水箱的特性确定与实验曲线分析,通过实验法建立了液位控制系统的水箱数学模型,设计出了串级控制系统,针对所选液位控制系统选择合适的PID算法。
用MATLAB/Simulink建立液位串级控制系统,调节器采用PID控制系统。
通过仿真比较了单回路液位控制系统和串级控制系统控制的不同之处,以及参数的整定及各个参数的控制性能的比较,对所得到的仿真曲线进行分析,总结了参数变化对系统性能的影响。
关键词:MATLAB;PID控制;串级控制;液位系统仿真More let water tank PID level control systemsimulationAbstractBecause single loop control system has not overcome some of the liquid level control issues, such as: big time delay, non-linear process, capacity lag and so on. So this design is proposed to solve these problems, the cascade control for single loop control system can't control problems were solved, meanwhile compared single loop control system and cascade control system differences.The graduation design topic is based on the MATLAB PID level control system simulation. In the design, I mainlyresponsible is double let water tank simulation. The main content of this article include: software MATLAB, the introduction and application of the simulation of use in Simulink problems that should be paid attention to. Grasp the basic ideas of PID control to be familiar with PID algorithm, PID parameters setting method. Water tank with the experimental curves to determine the characteristics, through the test method analysis level control system was established mathematical model, the water tank designed cascade control system for the selected level control; choose the appropriate control system PID algorithm. MATLAB/Simulink establishes level cascade control system, the regulator using fuzzy PID control system. Through the comparative simulation single loop level control system and a cascade control system control differences, and parameter setting and various parameters control performance comparison, application gets PID control algorithm is analyzed for simulation curve, summarizes the parameters on the system performance impact.Keywords: MATLAB;PID control; Cascade control; Level system simulation目录1 绪论 (1)1.1问题的提出及研究意义 (1)1.1.1 水箱控制系统研究的意义 (1)1.2PID控制算法的研究现状 (2)1.3PID控制的应用与发展 (2)1.4本次设计的主要工作 (3)2 MATLAB仿真概述 (4)2.1过程控制系统的MATLAB计算与仿真 (4)2.1.1 控制系统计算机仿真 (4)2.2控制系统的MATLAB计算与仿真 (4)3 PID控制简介及其整定方法 (7)3.1PID控制简介 (7)3.1.1 PID控制原理 (7)3.2PID控制算法 (8)3.2.1 位置型算法 (9)3.2.2 增量型算法 (9)3.3PID调节的各个环节及其调节过程 (10) 3.3.1 比例控制与其调节过程 (10)3.3.2 比例积分调节 (11)3.3.3 比例积分微分调节 (12)3.4串级控制 (12)3.5串级控制系统的设计 (14)3.5.1 主回路的设计 (14)3.5.2 副回路的设计 (14)3.5.3 主、副回路的匹配 (15)3.6串级控制系统的工业应用 (16)3.6.1 用于克服被控过程较大的容量滞后 (16) 3.7PID控制的特点 (16)3.8PID参数整定方法 (16)3.8.1 传统整定方法 (17)4 双容液位控制系统的建模 (19)4.1过程建模的方法 (19)4.1.1 机理法 (19)4.1.2 测试法 (19)4.1.3 阶跃响应法 (20)4.2分析多容过程的数学建模 (21)4.2.1 一阶单容上水箱特性 (21)4.2.2 二阶双容下水箱对象特性 (23)5 双容液位控制系统的仿真 (25)5.1被控对象的仿真模型 (25)5.2单回路控制系统的仿真 (25)5.3串级控制系统的仿真 (30)5.3.1 当副环采用PID调节时 (32)结论 (37)致谢 (38)参考文献 (39)1 绪论1. 1 问题的提出及研究意义大多数情况下,单回路控制系统能够满足工艺生产的基本要求。
双容水箱

毕业设计双容水箱实验教学仿真系统开发设计摘要本论文的目的是设计双容水箱液位串级控制系统。
在设计中充分利用自动化仪表技术,计算机技术,通讯技术和自动控制技术,以实现对水箱液位的串级控制。
作为一个过程控制实验装置,双容水箱液位控制系统具有强大的实验功能,不仅可以实现单入单出一阶对象、二阶对象、和非线性双入双出对象,而且还可以作为一种多功能型实验设备去验证各种工业过程的控制算法。
首先对被控对象的模型进行分析,并采用实验建模法求取模型的传递函数。
其次,设计PID 控制器,在 Matlab/Simulink 环境下建立双容水箱控制的仿真模型,对 PID控制算法进行仿真研究,通过仿真实验,证明该设计方法可行性和该算法的正确正确性。
关键词 : 双容水箱, 实验法建模, PID 控制DOUBLE LET WATER TANK EXPERIMENT TEACHING SIMULATION SYSTEM DEVELOPMENT DESIGNABSTRACTThe purpose of this thesis is to design the liquid level's concatenation control system of the double capacity water tank. This design makes full use of the automatic indicator technique, the computer technique, the communication technique and the automatic control technique in order to realize concatenation control of water tank's liquid. As a process control experiment device, double let water tank level control system has strong experiment function: can not only realize and single-output first-order object, and the second object, and nonlinear double into double the object, but also can serve as a kind of functional laboratory equipment to test various industrial process control algorithm.First, I carry out the analysis of the controlled objects' model, and use the experimental method to calculate the transfer function of the model. Next,PID controller is designed in Matlab / Simulink environment to establish control of two-tank simulation model,Simulation of the PID control algorithm is studied through simulation experiments show the feasibility of the design method and the algorithm is correct.KEYWARDS:the double capacity water tank, experiment modeling, PID control目录摘要 (I)ABSTRACT (II)1绪论 (1)1.1课题提出背景 (1)1.2 国内外研究现状 (1)1.2.1 国外研究现状 (2)1.2.2 国内研究现状 (2)1.3 过程控制的发展过程 (3)1.3.1 过程控制的发展 (3)1.3.2 过程控制策略与算法的进展 (4)1.3.3 传统过程控制存在的问题 (5)1.3.4 过程控制的发展趋势 (5)1.4 控制理论的发展 (5)1.5 研究目的 (7)1.6 本章小结 (7)2双容水箱的数学建模 (8)2.1 数学模型的介绍 (8)2.1.1数学模型的定义 (8)2.1.2数学模型建立方法 (8)2.2 双容水箱数学模型建立 (9)2.2.1双容水箱总体结构及工作原理的分析与介绍 (9)2.2.1.1双容水箱系统的总体结构 (9)2.2.1.2单入单出的一阶系统对象的结构 (10)2.2.1.3单入单出的二阶系统对象的结构 (11)2.2.1.4 双容水箱系统的特点 (11)2.2.2 双容水箱实验台 (11)2.2.3双容水箱系统的特点 (12)2.2.4 被控对象数学模型推导 (13)2.2.4.1单容水箱数学模型 (13)2.2.4.2双容水箱数学模型 (15)2.2.4.3双容水箱系统模型的参数辨识 (17)2.3 本章小结 (17)3 PID控制理论与参数整定 (18)3.1 PID控制理论的发展与现状 (18)3.2 PID控制原理及特点 (18)3.2.1 PID控制器工作原理 (18)3.2.2 PID控制器的特点 (20)3.3 PID控制器的参数整定 (20)3.3.1 经验试凑法 (21)3.3.2 临界比例度法 (21)3.3.3 衰减曲线法 (21)3.4 PID参数对系统性能的影响 (22)3.5 本章小结 (22)4控制系统设计 (23)4.1 控制系统性能指标 (23)4.2 控制方案选择 (23)4.3 串级控制系统的组成 (23)4.4 双容水箱串级控制系统的设计 (24)4.4.1主、副回路设计 (25)4.4.2 主、副变量设计 (25)4.4.3操作变量设计 (25)4.4.4 主、副控制器设计 (25)4.4.5 控制器参数整定 (26)4.4.5.1 整定过程 (27)4.4.6 控制系统抗扰动能力测试 (32)4.5 本章小结 (33)结论 (34)参考文献 (35)致谢 (36)1绪论1.1课题提出背景随着工业生产的飞速发展,人们对控制系统的控制精度、响应速度、系统稳定性与适应能力的要求越来越高。
双容水箱液位控制系统毕业设计(论文)
内蒙古科技大学本科生毕业设计说明书(毕业论文)题目:双容水箱液位控制系统学生姓名:学号:专业:班级:指导教师:双容水箱液位控制系统摘要本设计以PCT-Ⅲ型过程控制实验装置为基础,对双容水箱进行对象特性测试及液位控制。
通过对双容水箱液位控制系统的分析建模,针对其对象特性,采用串级PID控制方式,构成了以上水箱液位为副调节参数、下水箱液位为主调节参数的液位串级控制系统,有效地克服了二次干扰以及双容水箱的容量滞后等问题,从而缩短了调节时间。
利用北京亚控公司生产的组态王软件实施上位机界面组态,对系统进行实时地操作、监控。
在控制过程中不需要下位机,通过在组太王软件工程浏览器中的命令语言编辑对话框里面输入PID控制源程序,实现计算机直接控制的方式,通过RS232/485转换器和牛顿模块实现计算机与现场设备之间的数据交换。
并利用变频器使抽水泵工作在恒压供水的状态下,通过电动调节阀来实现控制目标。
在对双容水箱液位控制系统进行参数整定时,以使调节过程稳、准、快为原则,从而得到适合的调节器参数。
实验结果表明,系统实现了对过程参数的无稳态误差控制,具有良好的稳态性能和动态性能。
关键词: 液位;串级控制;PID 控制;组态软件;参数整定Double tank water level control systemAbstractThe design is based on the PCT-Ⅲ type of process control device for the testing object properties and level control on the two-tank. Through analysis and modeling for the two-tank water level control system, use of cascade PID control for its object properties and constitute a water level control system ,its deputy adjustable parameter is previous water level and the main adjustable parameters is under the tank's liquid level cascade control system. It overcomes the problems effectively about the second two-tank and capacity lagged behind and reduces the adjustment time. Use Configuration software which is generated by Beijing Asia's PC to implement the interface configuration, operate water level real-time and monitor the system. In the control process does not require the next crew, edit dialog box to enter the PID control inside source through the software engineering group in the browser command language to achieve direct control of the computer, through the RS232/485 converter and Newton module achieve the exchange of data between computer and field devices. And use the drive to work in the constant pressure water supply pumps in the state, through the electric control valve to achieve the control objectives. In two-tank water level control system parameters adjustment, follow the principle of steady, accurate, fast in adjustment process to get appropriate parameters. The experimental results show that the system of process parameters to achieve steady-state error-free control, with good steady state performance and dynamic performance.Keywords:Level; Cascade control; PID control; configuration software; parameter tuning目录摘要 (I)Abstract (II)第一章绪论 (1)1.1课题研究背景及意义 (1)1.2本文主要研究的内容 (2)第二章PCT试验装置介绍 (3)2.1 PCT实验装置构成简介 (3)2.1.1水箱 (3)2.1.2液位传感器 (3)2.1.3电动调节阀 (4)2.1.4压力传感器 (4)2.1.5变频器 (4)2.1.6三项磁力水泵 (5)2.1.7牛顿模块 (5)2.2双容水箱系统硬件结构 (6)2.3 水箱液位实验控制系统的用途 (7)第三章双容水箱液位控制系统分析设计 (8)3.1双容水箱液位控制系统分析 (8)3.1.1液位控制系统组成 (8)3.1.2液位控制系统的控制目标 (9)3.1.3液位控制系统的模型分析 (9)3.2 双容水箱液位控制系统方案设计 (12)3.2.1控制方案的选定 (12)3.2.2串级控制系统的特点 (13)3.2.3串级控制系统的设计 (13)3.2.4计算机串级控制算法实施 (17)3.2.5液位串级控制系统工作过程 (18)3.3液位控制系统参数整定 (19)3.3.1Kp、Ti、Td对控制质量的影响 (20)3.3.2几种工程整定方法介绍 (21)3.3.3串级控制系统的参数整定 (24)第四章组态软件设计 (27)4.1“组态王”简介 (28)4.2组态画面的建立 (28)4.2.1建立工程 (28)4.2.2设备配置 (29)4.2.3变量定义 (31)4.2.4画面设计与动画连接 (33)4.2.5实时曲线和历史曲线的建立 (36)4.2.6手自动切换和PID控制画面的建立 (38)第五章双容水箱液位控制系统实验 (40)5.1实验所用设备 (40)5.2实验过程 (40)5.3实验结果分析 (42)总结 (43)参考文献 (44)附录 (46)致谢 (48)第一章绪论1.1课题研究背景及意义随着科学技术的发展,现代工业生产工艺中的控制问题也日趋复杂。
基于PLC的双容水箱液位控制仿真与实物实验系统设计_朱涛

30
实 验 技 术 与 管 理
1 双 容 水 箱 系 统 的 数 学 模 型 和 控 制 方 案
双容水箱的控制过程与工业控制系统的控制过程 相似,尤其是双容水 箱 控 制 实 验 系 统,由 于 结 构 简 单, 能够帮助初学者更好 地 理 解 控 制 算 法 的 知 识,故 在 教 学环节中得到了较多的应用。现有的双容水箱控制实 验系统多采用 PLC、智 能 仪 表、工 控 机 或 DCS 等 作 为 控制平台进 行 实 物 实 验[3-5],采 用 Matlab、LabVIEW、 VB、组态软件等软件进行虚拟环境的仿真实验 。 [6-9]
Kμ R2C1s+1
由 (3)式 、(4)式 可 得 :
(7)
R3C2
dΔH2 dt
+ΔH2
= R3Q2
(8)
对 (6)式 进 行 拉 普 拉 斯 变 换 可 得 :
HQ22((ss))=
R3 R3C2s+1
整理可得双容水箱的传递函数为:
(9)
G(s)=
μQ12((ss))·HQ22((ss))=
Kμ · R3 T1s+1 T2s+1
的结构框图如图2所示。
图 1 双 容 水 箱 系 统 结 构 图
根 据 物 料 平 衡 关 系 ,可 以 写 出 下 列 增 量 方 程
ΔQ1
-ΔQ2
=
C1
dΔh1 dt
(1)
ΔQ2
=
Δh1 R2
(2)
ΔQ2
-ΔQ3
=
C2
dΔh2 dt
(3)
ΔQ3
=
Δh2 R3
(4)
式中:Q1、Q2、Q3 分 别 为 流 过 阀 门 F1-3、阀 门 F1-4、阀
双容水箱建模与水位控制系统仿真
双容水箱建模与水位控制系统仿真摘要:利用实验室双容水箱实验设备建立数学模型,基于MATLAB与Simulink,利用自动控制原理与现代控制理论研究控制水位的控制器。
双容水箱上水箱水位与下水箱水位为变量,系统具有典型的非线性、滞后性,先基于实验室设备对双容水箱建建模,后利用MATLAB与Simulink设计液位控制器,实现串级控制并验证控制器有效性。
关键词:双容水箱,建模,MATLAB工业自动化生产和现代化的生活中常常会遇到液位的控制问题,如饮料加工、生活用水、城市污水净化等,常使用蓄液罐(池) [1],且需要蓄液罐(池)液位维持在一定范围内。
本研究先利用实验室的双容水箱设备进行实验,根据实验测量液位、流量等参数,近似拟合出线性模型,基于MATLAB与Simulink设计液位控制器,对于仿真结果和实验结果进行分析,通过研究掌握观察对象的数学模型建立方法与控制器设计与调试的方法。
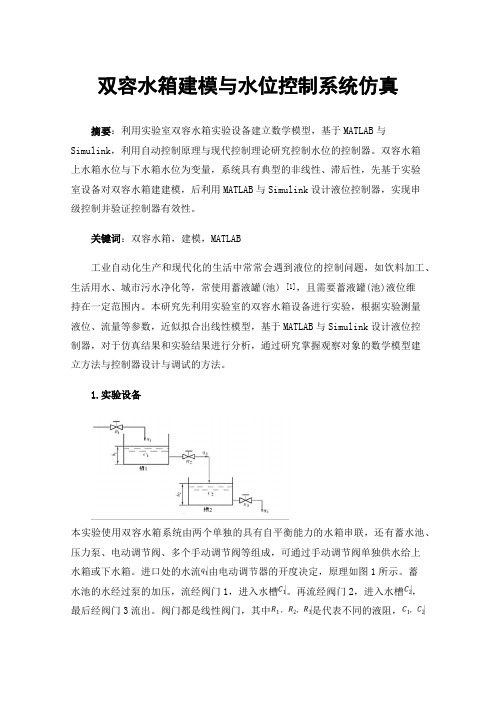
1.实验设备本实验使用双容水箱系统由两个单独的具有自平衡能力的水箱串联,还有蓄水池、压力泵、电动调节阀、多个手动调节阀等组成,可通过手动调节阀单独供水给上水箱或下水箱。
进口处的水流由电动调节器的开度决定,原理如图1所示。
蓄水池的水经过泵的加压,流经阀门1,进入水槽。
再流经阀门2,进入水槽,最后经阀门3流出。
阀门都是线性阀门,其中是代表不同的液阻,是上水箱和下水箱的容量,分别的上水箱、下水箱的液位高度,分别是上水箱的进水量,上水箱的出水量、下水箱的进水量,下水箱的出水量。
图1 双容水箱示意图2.实验原理与测量2.1实验原理上水箱和下水箱串联工作的双容过程系统,我们的被控量是下水箱的液位, 输入量上水箱的进水量。
双容水箱的数学模型一般为:其中为上水箱的时间常数,且;为第下水箱的时间常数,且;是过程的放大系数,;分别为两只水箱的容量系数[2]。
2.2实际测量阶跃响应曲线法测定属于实验法建模。
实验测试时将调节阀的开度作阶跃变化[3]。
双容水箱PID液位控制系统的仿真

双容水箱PID液位控制系统的仿真概述本文档介绍了双容水箱PID液位控制系统的仿真。
双容水箱PID液位控制系统是一种常见的工控系统,它能够自动控制水箱液位,保持水箱水位稳定。
通过仿真,可以帮助了解这种控制系统的原理、工作流程以及控制效果的评估。
功能•自动控制水箱液位,维持液位稳定•实时监测水箱液位•能够进行PID控制,控制精度高环境•软件平台:MATLAB/Simulink•环境要求:–MATLAB2018a及以上版本–Simulink库中带有相关的工控控制、信号处理和仿真工具箱设计步骤1.建立模型双容水箱PID液位控制系统的基本模型包括水箱、液位传感器、执行器和控制器。
我们需要在Simulink中建立这个模型。
模型中主要包含以下子系统:•水箱:在模型中建立一个水箱模块,用于模拟水箱的液位变化。
•液位传感器:创建一个液位传感器模块,通过采集水箱液位数据,将数据通过信号传输到系统的控制器。
•执行器:建立一个执行器模块,用于控制液位泵的启动和关闭。
•PID控制器:创建一个PID控制器模块,用于根据传感器采集的数据,计算出液位偏差,并根据偏差调节液位泵的运行状态。
2.建立信号连接连接各个模块之间的信号可以让模型正常运行,实现自动控制水箱液位的目的。
在模型中,应确保信号连接正确、完整,否则控制效果将大为降低。
3.设置参数在建立信号连接后,需要对各个模块的参数进行设置,确保模型的控制效果满足要求。
例如,PID控制器的比例、积分、微分系数等参数需要调整到合适的值,才能更好的实现水箱液位的控制。
4.进行仿真设置好模型参数后,可以进行仿真。
仿真可以模拟系统的实际运行情况,帮助了解控制器的控制效果,评估系统的性能。
在本文档中,我们介绍了双容水箱PID液位控制系统的仿真。
通过建立模型、建立信号连接、设置参数和进行仿真等步骤,可以更好地了解这种控制系统的原理,并对其控制效果进行评估。
本文档旨在提供帮助,方便工程师和研究者深入了解水箱液位控制系统的设计、实现及其相关技术。
双容水箱液位控制系统毕业设计
本科生毕业论文(设计)双容水箱液位控制系统院-系:工学院专业:电气工程及其自动化年级:学生姓名:学号:导师及职称:Department:Major:Electrical engineering and automation Grade:Student’s Name:Student No:Tutor:\毕业论文(设计)原创性声明本人所呈交的毕业论文(设计)是我在导师的指导下进行的研究工作及取得的研究成果。
据我所知,除文中已经注明引用的内容外,本论文(设计)不包含其他个人已经发表或撰写过的研究成果。
对本论文(设计)的研究做出重要贡献的个人和集体,均已在文中作了明确说明并表示谢意。
作者签名:日期:毕业论文(设计)授权使用说明本论文(设计)作者完全了解红河学院有关保留、使用毕业论文(设计)的规定,学校有权保留论文(设计)并向相关部门送交论文(设计)的电子版和纸质版。
有权将论文(设计)用于非赢利目的的少量复制并允许论文(设计)进入学校图书馆被查阅。
学校可以公布论文(设计)的全部或部分内容。
保密的论文(设计)在解密后适用本规定。
作者签名:指导教师签名:日期:日期:毕业论文(设计)答辩委员会(答辩小组)成员名单【摘要】随着现代工业生产过程向着大型、连续和强化方向发展,对控制系统的控制品质提出了日益增长的要求。
在这种情况下,简单的单回路控制已经难以满足一些复杂的控制要求。
串级控制系统是过程控制中的一种多回路控制系统,是为了提高单回路控制系统的控制效果而提出来的一种控制方案。
串级控制系统把两个单回路控制系统以一定的结构形式串联在一起,它不仅具有单回路控制系统的全部功能,而且还具有许多单回路控制系统所没有的优点。
串级控制系统采用了两个调节器,因此它的调节器的参数整定更复杂一些。
本论文论述了一个液位——流量串级控制系统的设计方法和步骤,介绍了它的参数整定方法。
在此过程中,介绍了对液位和流量进行检测和转换的常用元件,应用阶跃响应曲线推导了广义对象的传递函数,简单地论述了串级控制系统的优点,讨论了它对控制效果的改善作用,并使用仿真软件对该系统进行了仿真,最后用组态软件编制程序来实现控制。
双容水箱液位控制系统的建模及其PID控制算法研究

双容水箱液位控制系统的建模及其PID控制算法研究摘要随着工业生产的发展,双容水箱液位控制系统在国内各行各业的应用已经十分广泛。
本文通过理论推导,利用THKGK-1 型实验装置采集双容水箱液位的阶跃响应曲线,依据实验法建立双容水箱的数学模型,在MATLAB/Simulink下对线性PID控制器和双曲余弦增益的非线性PID控制器进行系统稳态与动态性能的研究。
结果表明:对于双容水箱这种大惯性、时延性、非线性被控对象,双曲余弦增益的非线性PID控制比线性PID控制更加快速、准确、稳定,能够迅速克服偏差,消除扰动。
关键词:双容水箱;实验法;双曲余弦增益;非线性PIDModel of the double coupled water tank liquid level control system and PID control algorithm researchAbstractAlong with the development of industrial production, the double coupled water tank liquid level control system has been widely applied in all walks of life at home.In this paper, through theoretical derivation, the author uses THKGK-1 type experimental apparatus to gather the step response curve of double coupled water tank liquid level and establishes the mathematical model of double coupled water tank based on the experimental method, and studies systematic steady state and dynamic performance of the linear PID controller and the hyperbolic cosine gain nonlinear PID controller under the MATLAB/Simulink.The results show that the hyperbolic cosine gain nonlinear PID control is more rapid, accurate, stable, and can more quickly overcome the deviation and eliminate disturbance than the linear PID control for the double coupled water tank which is the big inertia, time-delay, nonlinear controlled object.Key words: double coupled water tank; experimental method; hyperbolic cosine gain; nonlinear PID0.前言通常在生产过程当中的液位系统往往是随着时间变化的,由于系统的复杂,常有滞后特性,并且干扰成分繁多,波动性也很大。
毕业设计双容水箱系统的建模、仿真与控制
自动控制毕业设计双容水箱系统的建模、仿真与控制2015年 7月23日摘要自动控制课程设计是自动化专业基础课程《自动控制原理》和《现代控制理论》的配套实践环节,对于深入理解经典控制理论和现代控制理论中的概念、原理和方法具有重要意义。
本次课程设计以过程控制实验室双容水箱系统作为研究对象,开展了机理建模、实验建模、系统模拟、控制系统分析与综合、控制系统仿真等多方面的工作。
课程设计过程中,首先进行了任务I即经典控制部分的工作,主要从系统模型辨识、采集卡采集、PID算法的控制、串联校正进行性能指标的优化、滞后控制等方面进行了设计。
然后,又进行了任务II即现代控制部分的工作,主要从系统模型的串并联实现、能控能观标准型实现、状态反馈设计、状态观测器设计、降维观测器设计等方面进行了深入的研究。
最后选做部分单级倒立摆的内容,并对整个课程设计做了总结。
关键词:自动控制;课程设计;PID控制;根轨迹;极点配置;MATLAB;数据采集;经典控制;现代控制。
目录第1章引言 (1)1.1 课程设计的意义与目的 (1)1.2 课程设计的主要内容 (1)1.3 课程设计的团队分工说明 (2)第2章双容水箱系统的建模与模拟 (3)2.1 二阶水箱介绍 (3)2.2 二阶水箱液位对象机理模型的建立 (3)2.3 通过实验方法辨识系统的数学模型的建立 (7)2.3.1 用试验建模(黑箱)方法辨识被控对象数学模型 (7)2.3.2 通过仿真分析模型辨识的效果 (8)2.4 物理系统模拟 (9)第3章双容水箱控制系统的构建与测试 (11)3.1 数据采集卡与数据通讯 (11)3.2 构建系统并进行开环对象测试 (12)第4章双容水箱的控制与仿真分析——经典控制部分 (14)4.1采用纯比例控制 (14)4.2采用比例积分控制 (17)4.3采用PID控制 (21)4.4串联校正环节 (24)4.5采样周期影响及滞后系统控制性能分析 (28)第5章双容水箱的控制与仿真分析——现代控制部分 (31)5.1状态空间模型的建立 (31)5.2状态空间模型的分析 (33)5.3状态反馈控制器的设计 (34)5.4状态观测器的设计 (37)5.5基于状态观测的反馈控制器设计 (43)第6章基于状态空间模型单级倒立摆控制系统设计 (48)6.1 单级倒立摆系统介绍 (48)6.2 状态空间模型的建立 (49)6.3 能控能观性、稳定性的分析 (52)第7章总结 (53)7.1 课程设计过程的任务总结与经验收获 (53)7.2 课程设计中的不足和问题分析 (53)7.3 对课程设计的建议 (53)参考文献 (54)附录 (55)附录A:组员个人总结(一) (55)附录B:组员个人总结(二) (57)第1章引言1.1 课程设计的意义与目的自动控制课程设计是自动化专业基础课程《自动控制原理》和《现代控制理论》的配套实践环节,对于深入理解经典控制理论和现代控制理论中的概念、原理和方法具有重要意义。
毕业设计双容水箱系统的建模仿真与控制
毕业设计双容水箱系统的建模仿真与控制双容水箱系统的建模、仿真与控制是一种常见的控制系统设计问题,广泛应用于工程实践中。
本文将详细介绍双容水箱系统的建模、仿真与控制方法。
双容水箱系统是由两个水箱和一条水管组成的系统。
水箱之间通过水管连接,顶部设置了液位传感器进行监测。
控制系统的目标是通过控制水箱之间的水流,使得系统的液位保持在设定值附近。
这个问题既涉及到建模和仿真,又涉及到控制方法设计,是一个复杂的系统工程。
以下将分步骤介绍建模、仿真和控制方法。
首先,我们需要对双容水箱系统进行建模。
建模的目的是用数学模型描述系统的动态行为。
对于双容水箱系统,可以利用连续反应曲线方法进行建模。
该方法基于质量守恒原理和容积流量原理,根据水箱的液位变化率和水流量之间的关系,建立系统的微分方程模型。
接下来,我们可以利用建立的数学模型进行仿真分析。
仿真分析可以预测系统在不同工况下的动态响应,帮助我们理解系统的行为特性。
在仿真分析中,我们可以通过改变系统的参数和控制策略,来评估不同的调节方法对系统性能的影响,以及寻找最优的控制方案。
最后,我们需要设计控制方法来使得双容水箱系统达到所需的性能指标。
常用的控制方法包括比例积分微分控制(PID控制),模糊控制和自适应控制等。
在选择控制方法时,需要考虑系统的稳定性、鲁棒性和灵敏度等因素。
通过数学分析和干扰分析,可以确定最优控制参数,使得系统具有良好的控制性能。
总结起来,双容水箱系统的建模、仿真与控制是一个综合性的控制系统设计问题。
通过建立数学模型、进行仿真分析和设计合适的控制方法,可以使得系统达到所期望的控制目标。
该方法在工程实践中具有广泛应用,并可通过实际系统验证,为实际工程提供参考和指导。
双容水箱液位控制系统毕业设计

双容水箱液位控制系统毕业设计双容水箱液位控制系统是一种用于控制水箱液位的智能化系统,通过传感器、控制器和执行器等组件,实现对水箱液位的自动监测与控制。
本文将介绍关于双容水箱液位控制系统的毕业设计,包括设计目标、系统结构、工作原理和关键技术等方面的内容。
首先,设计目标是实现对双容水箱液位的智能化控制,以提高水箱的利用率和节约水资源。
具体目标包括:准确监测水箱液位,实时调节进水与排水流量,保持水箱液位在合理范围内。
其次,双容水箱液位控制系统的结构主要包括传感器模块、控制模块和执行器模块。
传感器模块用于监测水箱液位,可以采用压力传感器、浮球传感器或超声波传感器等;控制模块负责收集传感器数据,进行算法分析和决策,控制执行器模块的动作;执行器模块包括水泵和电磁阀等组件,通过控制水泵的运行和电磁阀的开关,调节进水与排水的流量,从而控制水箱液位。
系统的工作原理是首先通过传感器获取水箱液位信息,并传输给控制模块进行处理。
控制模块根据设定的液位范围和液位变化规律,判断当前液位状态,决定执行器的动作。
如果液位过高,则控制模块发送信号给执行器模块,开启电磁阀进行排水;如果液位过低,则控制模块发送信号给执行器模块,启动水泵进行进水。
通过不断的反馈和调整,控制系统可以使液位保持在合理范围内。
关键技术包括传感器选择与布置、控制算法设计和执行器参数调节等。
传感器的选择和布置需要考虑液位变化范围和液位测量的准确性;控制算法的设计需要根据实际情况制定,包括液位判断标准和动作决策规则;执行器参数调节需要根据实际需求和系统响应特性进行调整和优化。
综上所述,双容水箱液位控制系统的毕业设计旨在实现对水箱液位的智能化监测与控制。
通过设计合理的系统结构、优化的工作原理和关键技术的应用,可以实现对水箱液位的准确监测和精确控制,提高水资源的利用效率。
双容水箱PID液位控制系统的仿真

双容水箱液位PID控制算法的仿真研究摘要由于单回路控制系统已不能克服液位控制中的一些问题,如:大时延、非线性、容量滞后等。
因此本设计针对这些问题设计串级控制,对单回路控制系统无法控制的问题进行解决,同时比较单回路控制系统和串级控制系统的不同之处。
本次毕业设计的课题是多容水箱的PID液位控制系统的仿真。
在设计中,主要针对双容水箱进行了研究和仿真。
本文的主要内容包括:对水箱的特性确定与实验曲线分析,通过实验法建立了液位控制系统的水箱数学模型,设计出了串级控制系统,针对所选液位控制系统选择合适的PID算法。
用MATLAB/Simulink建立液位串级控制系统,调节器采用PID控制系统。
通过仿真比较了单回路液位控制系统和串级控制系统控制的不同之处,以及参数的整定及各个参数的控制性能的比较,对所得到的仿真曲线进行分析,总结了参数变化对系统性能的影响。
关键词:MATLAB;PID控制;串级控制;液位系统仿真More let water tank PID level control systemsimulationAbstractBecause single loop control system has not overcome some of the liquid level control issues, such as: big time delay, non-linear process, capacity lag and so on. So this design is proposed to solve these problems, the cascade control for single loop control system can't control problems were solved, meanwhile compared single loop control system and cascade control system differences.The graduation design topic is based on the MATLAB PID level control system simulation. In the design, I mainly responsible is double let water tank simulation. The main content of this article include: software MATLAB, the introduction and application of the simulation of use in Simulink problems that should be paid attention to. Grasp the basic ideas of PID control to be familiar with PID algorithm, PID parameters setting method. Water tank with the experimental curves to determine the characteristics, through the test method analysis level control system was established mathematical model, the water tank designed cascade control system for the selected level control; choose the appropriate control system PID algorithm. MATLAB/Simulink establishes level cascade control system, the regulator using fuzzy PID control system. Through the comparative simulation single loop level control system and a cascade control system control differences, and parameter setting and various parameters control performance comparison, application gets PID control algorithm is analyzed for simulation curve, summarizes the parameters on the system performance impact.Keywords: MATLAB;PID control; Cascade control; Level system simulation目录1 绪论 (1)1.1问题的提出及研究意义 (1)1.1.1 水箱控制系统研究的意义 (1)1.2PID控制算法的研究现状 (2)1.3PID控制的应用与发展 (2)1.4本次设计的主要工作 (3)2 MATLAB仿真概述 (4)2.1过程控制系统的MATLAB计算与仿真 (4)2.1.1 控制系统计算机仿真 (4)2.2控制系统的MATLAB计算与仿真 (4)3 PID控制简介及其整定方法 (7)3.1PID控制简介 (7)3.1.1 PID控制原理 (7)3.2PID控制算法 (8)3.2.1 位置型算法 (9)3.2.2 增量型算法 (9)3.3PID调节的各个环节及其调节过程 (10)3.3.1 比例控制与其调节过程 (10)3.3.2 比例积分调节 (11)3.3.3 比例积分微分调节 (12)3.4串级控制 (12)3.5串级控制系统的设计 (14)3.5.1 主回路的设计 (14)3.5.2 副回路的设计 (14)3.5.3 主、副回路的匹配 (15)3.6串级控制系统的工业应用 (16)3.6.1 用于克服被控过程较大的容量滞后 (16)3.7PID控制的特点 (16)3.8PID参数整定方法 (16)3.8.1 传统整定方法 (17)4 双容液位控制系统的建模 (19)4.1过程建模的方法 (19)4.1.1 机理法 (19)4.1.2 测试法 (19)4.1.3 阶跃响应法 (20)4.2分析多容过程的数学建模 (21)4.2.1 一阶单容上水箱特性 (21)4.2.2 二阶双容下水箱对象特性 (23)5 双容液位控制系统的仿真 (25)5.1被控对象的仿真模型 (25)5.2单回路控制系统的仿真 (25)5.3串级控制系统的仿真 (30)5.3.1 当副环采用PID调节时 (32)结论 (37)致谢 (38)参考文献 (39)1 绪论1. 1 问题的提出及研究意义大多数情况下,单回路控制系统能够满足工艺生产的基本要求。
【优秀毕设】双容水箱水位控制系统设计

摘要双容水箱液位控制系统是采用先进的控制算法完成对过程液位的控制的控制系统,它在饮料、食品加工、溶液过滤、化工生产等多种行业的生产加工过程中均有广泛应用。
在本设计中充分利用自动化仪表技术,计算机技术,通讯技术和自动控制技术,以实现对水箱液位的串级控制。
首先对被控对象的模型进行分析,并采用实验建模法求取模型的传递函数。
其次,根据被控对象模型和被控过程特性设计串级控制系统,采用动态仿真技术对控制系统的性能进行分析。
然后,设计并组建仪表过程控制系统,通过智能调节仪表实现对液位的串级PID控制。
最后,借助数据采集模块﹑MCGS组态软件和数字控制器,设计并组建远程计算机过程控制系统,完成控制系统实验和结果分析。
关键词:液位,模型,PID控制,仪表过程控制系统,计算机过程控制系统AbstractDouble tank water level control system is the use of advanced control algorithm of process liquid level control system, it is in the beverage, food processing, filtering solution, chemical production and other industries in the production process has been widely used. In the design of the full use of automation technology, computer technology, communication technology and automatic control technology, in order to achieve the water tank liquid level cascade control. Firstly, the object model is analyzed, and the experimental modeling method for model transfer function. Secondly, according to the controlled object model and the controlled process characteristic design of cascade control system, using dynamic simulation technology to the control system performance analysis. Then, design and construction process control instrumentation system, through the intelligent controller for liquid level cascade PID control. Finally, with the help of a data acquisition module, MCGS configuration software and digital controller, design and establishment of a remote computer process control system, complete control system experiment and result analysisKeywords:liquid level,model PID control,indicator process control system,computer process control system目录摘要 (Ⅰ)Abstract (Ⅱ)1 绪论 (1)2 被控对象建模 (2)2.1 水箱模型分析 (2)2.2 阶跃响应曲线法建立模型 (3)3 系统控制方案设计与仿真 (7)3.1 液位串级控制系统介绍 (7)3.2 PID控制原理 (7)3.3 系统控制方案设计 (10)3.4 控制系统仿真 (12)4 建立仪表过程控制系统 (17)4.1 过程仪表介绍 (17)4.2 仪表过程控制系统的组建 (19)4.3 仪表过程控制系统PID参数整定 (23)5 模拟计算机过程控制系统 (25)5.1 计算机过程控制系统硬件设计 (25)5.2 MCGS软件工程组态 (28)5.3 组态软件调试 (38)6 结论 (40)参考文献 (41)致谢 (42)附录 (43)1绪论双容水箱系统是一种比较常见的工业现场液位系统,在实际生产中,双容水箱控制系统在石油、化工﹑环保﹑水处理﹑冶金等行业尤为常见。
自动化专业论文 基于西门子PLC的双容水箱液位控制系统设计

基于西门子PLC的双容水箱液位控制系统设计摘要液位控制系统是PLC在工业控制中的重要应用,本文介绍了基于西门子PLC-200的双容水箱液位控制系统,对双容水箱进行了系统建模和控制方案设计,然后通过MATLAB工具对PID控制算法进行了仿振,验证了PID调节器对于液位的控制作用。
并利用现场相关的硬件设施配合组态王6.5.5软件进行上位机监控系统的开发,完成了对现场数据的采集、流程图画面制作、实时曲线显示等功能,以实现对液位的实时监测和控制。
仿真结果表示,该系统可有效解决双容水箱液位控制中存在的容量滞后问题。
最后,对全文所做的工作进行了总结,分析了不足之处,并对液位控制的前景进行了展望。
关键词:西门子PLC;双容水箱;组态王;PID控制AbstractLiquid level control system is an important application of PLC in industrial control, this paper introduces the double let water tank level control system which bases on Siemens PLC-200, it do the work of the system modeling and control designing for double-tank system. Then,PID control algorithm is simulated through MATLAB tool, to verify the effectiveness of the PID controller for level control function. And by using the related hardware facilities together with kingview 6.5.5 software for the development of PC monitoring and controlling system, it completes the function of collecting the flow chart, manufacturing field data, and showing real-time curve, etc, in order to realize the real-time monitoring and control of the liquid level. The results of simulation show that the system can effectively solve the problem of existing V olume lag in the double let water tank level control. In the end,it summarizes the whole work of this paper, analyzs the deficiency, and the prospect of liquid level control is discussed.Keywords:Siemens; double-tank system; kingview; PID control;摘要 (I)Abstract (II)第1章绪论 (6)1.1液位控制研究的背景及其意义 (6)1.2液位控制的研究现状 (8)1.3论文主要工作 (9)第2章系统建模和方案论证 (10)2.1系统建模 (10)2.1.1双容水箱水位的动态特性 (10)2.1.2双容水箱的飞升曲线 (11)2.2双容水箱串级调节系统 (13)2.3系统设计方案 (13)第三章 PID控制算法 (15)3.1PID调节器简介 (15)3.2PID控制原理 (15)3.3MATLAB仿真结果 (16)第四章系统硬件设计 (17)4.1液位控制系统的结构 (17)4.2液位控制系统的选型 (20)第五章基于组态王的双容水箱监控软件开发 (22)5.1组态王软件简介 (22)5.2双容水箱液位控制系统工程的组态设计 (22)结语 (31)参考文献 (32)致谢 (33)附录 (34)PLC程序梯形图 (34)主程序 (34)PID初始化 (36)第1章绪论1.1液位控制研究的背景及其意义当今工业生产发展很快,人们希望进一步提高生产过程自动化控制水平和获得更好的工业产品质量。
双容液位控制系统 建模及仿真

控制系统仿真实验报告双容液位控制系统2012/6/21目录一、实验目的和要求二、实验内容和原理三、主要仪器设备四、操作方法和实验步骤五、实验数据记录、处理以及结果分析1.液位控制系统的建模——机理法 (4)2.液位控制系统的建模——测试法 (5)2.1.对数据需要进行预处 (5)2.1.1.数据平滑 (5)2.1.2.数据去趋势 (6)2.1.3.数据滤波 (7)2.1.4.数据重采样 (7)2.2.经典时域辨识法——从阶跃响应求取传递函数模型 (7)2.2.1.AD——二阶对象传递函数 (8)2.2.2.AD2——一阶对象传递函数 (11)2.3.频域辨识法——从随机输入信号获得脉冲响应序列并转化为传递函数 (12)2.3.1.伪随机信号 (12)2.3.2.自相关函数(2个周期) (14)2.3.3.互相关函数 (14)2.3.4.脉冲响应序列 (16)2.3.5.Levy拟合 (18)2.3.6.Matlab辨识工具箱 (20)2.4.采用仿真的方法对模型进行验证 (22)2.4.1.时域辨识模型 (22)2.4.2.频域辨识模型 (23)2.4.3.工具箱辨识模型 (24)3.基于所建立的模型进行控制器设计 (24)3.1.串联校正环节 (24)3.1.1.系统频率特性计算 (26)3.1.2.串联校正装置传递函数的计算 (27)3.2.PID控制器 (37)3.2.1.PID参数整定 (37)3.2.2.连续系统PID控制器 (37)3.2.3.离散系统PID控制器 (48)3.2.4.PID控制器的鲁棒性 (52)3.3.用状态空间方法进行控制器设计 (57)3.3.1.状态空间 (57)3.3.2.极点配置方法 (58)3.3.3.LQG方法 (63)六、讨论、心得实验报告课程名称: 控制系统仿真实验 指导老师: 成绩:__________________实验名称: 实际对象的建模与仿真 实验类型: 同组学生姓名:一、实验目的和要求(必填) 二、实验内容和原理(必填)三、主要仪器设备(必填) 四、操作方法和实验步骤五、实验数据记录和处理 六、实验结果与分析(必填)七、讨论、心得一、 实验目的和要求1、 掌握根据输入输出数据建立对象模型的方法2、 掌握根据模型进行控制器设计的方法二、 实验内容和原理【实验内容】1、 根据输入输出数据建立对象的模型1) 对数据需要进行预处理,可以包括滤波、去稳态、去均值、去趋势(detrend,dtrend )、重采样(resample, idresamp )等;2) 从阶跃响应或方波响应求取传递函数模型;3) 从随机输入信号获得脉冲响应序列并转化为传递函数(注意需要辨识脉冲响应序列的个数覆盖过渡过程时间即可),与阶跃响应得到的模型进行对比;4) 采用仿真的方法对模型进行验证;(模型得到的输出与实际输出之间的对比)5) 如果数据足够多,可以采用不同的数据段分别建立模型进行验证。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
自动控制毕业设计双容水箱系统的建模、仿真与控制2015年 7月23日摘要自动控制课程设计是自动化专业基础课程《自动控制原理》和《现代控制理论》的配套实践环节,对于深入理解经典控制理论和现代控制理论中的概念、原理和方法具有重要意义。
本次课程设计以过程控制实验室双容水箱系统作为研究对象,开展了机理建模、实验建模、系统模拟、控制系统分析与综合、控制系统仿真等多方面的工作.课程设计过程中,首先进行了任务I即经典控制部分的工作,主要从系统模型辨识、采集卡采集、PID算法的控制、串联校正进行性能指标的优化、滞后控制等方面进行了设计。
然后,又进行了任务II即现代控制部分的工作,主要从系统模型的串并联实现、能控能观标准型实现、状态反馈设计、状态观测器设计、降维观测器设计等方面进行了深入的研究.最后选做部分单级倒立摆的内容,并对整个课程设计做了总结。
关键词:自动控制;课程设计;PID控制;根轨迹;极点配置;MATLAB;数据采集;经典控制;现代控制。
目录第1章引言 (1)1。
1 课程设计的意义与目的 (1)1.2 课程设计的主要内容 (1)1.3课程设计的团队分工说明ﻩ2第2章双容水箱系统的建模与模拟ﻩ32.1 二阶水箱介绍ﻩ32.2二阶水箱液位对象机理模型的建立ﻩ32。
3 通过实验方法辨识系统的数学模型的建立ﻩ72。
3.1用试验建模(黑箱)方法辨识被控对象数学模型ﻩ72.3。
2 通过仿真分析模型辨识的效果ﻩ82.4 物理系统模拟 (9)第3章双容水箱控制系统的构建与测试 (11)3.1 数据采集卡与数据通讯ﻩ113。
2 构建系统并进行开环对象测试.................................... 12第4章双容水箱的控制与仿真分析--经典控制部分......................... 144.1采用纯比例控制 (14)4.2采用比例积分控制................................. 错误!未定义书签。
4.3采用PID控制 .................................................... 2124.4串联校正环节ﻩ424.5采样周期影响及滞后系统控制性能分析ﻩ8第5章双容水箱的控制与仿真分析-—现代控制部分......................... 315.1状态空间模型的建立.. (31)5.2状态空间模型的分析ﻩ3335。
3状态反馈控制器的设计ﻩ45.4状态观测器的设计 (37)5.5基于状态观测的反馈控制器设计 (43)第6章基于状态空间模型单级倒立摆控制系统设计.......................... 486.1 单级倒立摆系统介绍. (48)6。
2状态空间模型的建立........................................... 496。
3能控能观性、稳定性的分析..................................... 525第7章总结ﻩ37。
1 课程设计过程的任务总结与经验收获 (53)57。
2 课程设计中的不足和问题分析ﻩ357.3 对课程设计的建议ﻩ35参考文献ﻩ4附录.................................................................. 55附录A:组员个人总结(一)............................................ 55附录B:组员个人总结(二) ........................................... 57第1章引言1。
1 课程设计的意义与目的自动控制课程设计是自动化专业基础课程《自动控制原理》和《现代控制理论》的配套实践环节,对于深入理解经典控制理论和现代控制理论中的概念、原理和方法具有重要意义.在平时的学习中,我们只是停留在理论学习的层面上,对一些知识点没有直观深刻的了解。
通过这次课程设计,我们能够对之前学过的知识进行更进一步的理解与应用,我们之前学过的知识得到巩固。
不仅如此,对于我们进行软件仿真和编写程序同样具有很好的指引作用,锻炼了我们这方面的能力。
总之,本次课程设计对于我们深入理解经典控制理论和现代控制理论中的概念、原理和方法具有重要意义,本次课程设计涉及了《自动控制原理》、《现代控制理论》、《控制系统仿真》、《系统辨识》等课程内容,将本专业的各项内容有机融合在了一起,增加了我们的专业知识的储备,提高了我们的学习能力。
1。
2 课程设计的主要内容任务I 经典控制部分二阶水箱液位对象机理模型的建立;通过实验方法辨识系统的数学模型的建立;二阶水箱系统的物理模拟;数据采集卡与数据通讯;开环对象特性测试;比例系数变换对系统闭环性能的影响;比例积分控制器对控制性能的影响;PID控制器对控制性能的影响;串联校正环节的设计与分析;采样周期影响分析、滞后系统控制性能分析;任务Ⅱ现代控制部分状态空间模型模型的建立、分析;状态反馈控制器的设计;状态观测器的设计;基于状态观测的反馈控制器设计;1.3课程设计的团队分工说明我们团队选取了16号水箱装置进行分析设计,具体分工如下所示.xxx:各部分的参数计算、编程实现及实际电路仿真。
xxx:电路的设计与各环节仿真运行结果分析,撰写报告。
第2章双容水箱系统的建模与模拟2。
1二阶水箱介绍过程实验室GK06是由两个水箱和一个调节器构成的,上下两个水箱由阀门控制开度,入口流量由调节阀的开度所决定,被控变量是下水箱的液位。
在本次课程设计中,首先选取GK06装置中的1#水箱和2#水箱串联组成的液位控制系统,选取控制变量为变频泵的频率,被控变量为2#水箱的液位。
针对上述系统首先建立被控对象模型,然后使用控制系统实验箱搭建电路,模拟水箱液位控制系统的被控对象,最后针对搭建的模拟对象设计控制系统,满足控制要求。
图1—1 双容水箱装置流程图图1-2 控制流程图2.2二阶水箱液位对象机理模型的建立(用机理建模(白箱)方法建立系统机理模型,对机理模型进行线性化) 从M ain Frm.cpp 里面找到本组的数据:1081=A 702=A 472=U 503=U控制作用为u ,控制调节阀的开度,从而影响第1个水箱的液位1H 和第2个水箱的液位2H 。
已知两个水箱的截面积是1A 、2A ,控制作用u 和调节阀管道上的流量之间的关系为:⎪⎪⎩⎪⎪⎨⎧===2331221211H u k Q H u k Q u k Q O iﻩ (2-1)其中,k 1=10 ,k 2=1.9 ,k 3=1。
65 上水箱1H =11.282951 下水箱=2H 13.223070根据物料平衡,列写关系表达式:111222232i dH A Q Q dt dH A Q Q dt y H ⎧=-⎪⎪⎨⎪=-⎪⎩= ﻩﻩ (2-2)ﻩ将(1)带入(2),得2233122*********)(1)(1H y H u k H u k A dtdH H u k u k A dt dH =⎪⎪⎩⎪⎪⎨⎧-=-=(2-3) 线性模型仿真对状态方程进行增量化,并在工作点处进行线性化a 。
先求出稳态时的关系式考虑到:ﻩ uu u H H H H H H ∆+=∆+=∆+=222111 (2—4)ﻩ ⎪⎪⎩⎪⎪⎨⎧===2331222111H u k Q H u k Q u k Q O (2-5) ⎩⎨⎧=-=-003221Q Q Q Q(2-6)则(4)和(5)式带入(6)有⎪⎩⎪⎨⎧=-=-02.583.8903.89102111H H H u (2—7) b . 将(5)带入(3),进而对微分方程中的各变量用相应的增量代替,有⎪⎪⎩⎪⎪⎨⎧∆+-∆+=∆+∆+-∆+=∆+)(1)())((1)(22331122221122111H H u k H H u k A dt H H d H H u k u u k A dt H H d (2—8) 即:⎪⎪⎩⎪⎪⎨⎧∆+-∆+=∆∆+-∆+=∆)(1)()(1)(22331122221122111111H H u k H H u k A dt H d H H u k u k u k A dt H d (2—9) c.为了将上述微分方程(10)进行线性化, 将11H H ∆+在1H 处展开成Tayl or 级数,只取到线性项:1111121H H H H H ∆+=∆+ (2—10)同理,将22H H ∆+在2H 处展开成Taylor 级数,只取到线性项:2222221H H H H H ∆+=∆+ (2-11)将(2—11)和(2—10)代入(2-9),则:⎪⎪⎩⎪⎪⎨⎧∆--∆+=∆∆--∆+=∆)2121(1)()21(1)(22332331122122221122122111111H H u k H u k H H u k H u k A dt H d H H u k H u k u k u k A dt H d (2-12) d.最后得到线性化的微分方程由(2—7)和(2-12),有:⎪⎪⎩⎪⎪⎨⎧∆-∆=∆∆-∆=∆)2121(1)()21(1)(223311222211221111H H u k H H u k A dt H d H H u k u k A dt H d (2-13) 令:221122U K H R = =0.0752398,33222U K H R = =0。
08815403 ;写成矩阵的形式:⎥⎦⎤⎢⎣⎡∆∆⎥⎥⎦⎤⎢⎢⎣⎡+⎥⎦⎤⎢⎣⎡∆∆⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡--=∆•d u Q u A A H H AR AR AR H 001k 11012121212 (2—14) 其中 01230633.0A 1121-=-R 01898689.01122=R A 注:1A 、2A 计算时要⨯10009259259.01=A k u 000925926.011=A ⎥⎦⎤⎢⎣⎡--=∴0162054.001898689.0001230633.0A ⎥⎦⎤⎢⎣⎡=00000925926.0009259259.0B []10=C []00=D此时,8815403.021==R K K2。
3通过实验方法辨识系统的数学模型的建立2。
3.1用试验建模(黑箱)方法辨识被控对象数学模型图2—1 二阶水箱的仿真模型 初始稳定 30%1y :13。
2230700t =1153s 加阶跃后稳定 35% 2y :17.980470 ’0t =2296s 774977.412=-=∆y y y ,5=∆U9549954.05774977.4y ==∆∆=U K 9099908.14.0=⨯∆y 81998160.38.0=⨯∆y123154.151330608.154.01−→−=∆⨯+y y , 1261'1=t s , 1080'11=-=t t t s047052.170430516.178.01−→−=∆⨯+y y ,1396'2=t s ,2430'22=-=t t t s7139.547861.10755.074.1)(16.22121221212121==⇒⎪⎪⎩⎪⎪⎨⎧-⨯=++=+T T t t T T T T t t T T )1)(1(21++=s T s T KG即 15.1623979.58979549954.0)17139.54)(17861.107(9549954.02++=++=s s s s G(2—15)2.3.2通过仿真分析模型辨识的效果图2-2 simul ink 仿真模型图2-3 仿真图像由图像可得,理论与实测的曲线基本一致,可知仿真效果较为理想。