控制工程midterm-test
控制工程实验报告
控制工程实验报告1. 引言控制工程是一门研究如何通过设计和操作系统来达到预期目标的学科。
实验是控制工程学习过程中重要的一部分,通过实验可以加深对控制理论的理解,提高实际操作能力。
本实验报告旨在总结和分析在进行控制工程实验时所遇到的问题和解决方法。
2. 实验背景本次实验旨在研究单输入单输出(SISO)的控制系统。
通过建模、设计和实施控制器,我们将探讨如何使系统达到期望的性能指标。
在实验过程中,我们使用了控制工程中常用的方法和工具,如PID控制器、校正方法和稳定性分析等。
3. 实验目标本实验的主要目标是设计一个PID控制器来控制一个特定的系统,使其满足给定的性能要求。
具体目标如下: - 理解PID控制器的原理和工作方式; - 利用实验数据建立系统的数学模型; - 利用系统模型设计优化的PID控制器; - 分析和评估实验结果,判断控制系统的稳定性和性能。
4. 实验过程实验分为以下几个步骤: ### 4.1 建立系统模型首先,我们需要对所控制的系统进行建模。
使用传感器收集系统的输入和输出数据,并通过系统辨识方法分析这些数据,得到系统的数学模型。
常用的辨识方法包括最小二乘法和频域分析法。
4.2 设计PID控制器基于系统模型的分析,我们可以设计PID控制器。
通过调整PID控制器的参数,如比例增益、积分时间常数和微分时间常数,我们可以优化控制系统的性能。
4.3 实施控制器将设计好的PID控制器实施到实际系统中。
在实验中,我们需要将传感器和控制器与被控对象连接,并配置合适的控制策略。
4.4 性能评估通过收集系统的输入和输出数据,并利用系统模型进行仿真和分析,我们可以评估控制系统的性能。
常见的评估指标包括超调量、上升时间和稳态误差等。
5. 实验结果与分析根据实验数据和分析结果,我们得到了以下结论: - PID控制器可以有效地控制被控对象,使其稳定在期望值附近; - 通过适当调整PID控制器的参数,我们可以优化控制系统的性能; - 预测模型与实际系统存在一定差异,可能需要进一步改进和校正。
控制工程实验-第6章

Kpls i0m G (s)G (0)
用静态位置误差系数表示的单位阶跃输入
下的稳态误差为
1
ess 1 K p
K, 0型系统 Kpls i0m G (s)G (0) , I型或 I型 高系 于
ess11Kp
11K, 0,
0型系统 I型或高 I型于 系统
• 如果单位反馈控制系统前向通道中没有包 含积分环节,那么它对阶跃输入的响应中 包含稳态误差。
及稳态误差的方法。
6.2.1 误差传递函数与稳态误差
对于下图所示的单位反馈控制系统,
输入引起的系统误差传递函数为
e(s)X E i((ss))1G 1(s)1G c(s)
则
E(s) 1 1G(s)
Xi(s)
如果系统稳定,根据终值定理,可计
算稳态误差
1 e ss e( ) ls i0s m (E s) ls i0s m 1 G (s)X i(s)
本节的要点:
掌握有干扰时的稳态误差计算方法。
s1G 2 G (2 s()G s)1 H ssH sN s
根据终值定理,干扰引起的稳态偏差为
则干扰引起ss的lt稳 i 态m 误(t)差为ls i0s m (s)
ess
ss
H 0
干扰引起的稳态误差也可以这样来求:
由于干扰产生的输出全是系统误差,因此, 干扰引起的稳态误差等于干扰产生的稳态 输出乘以(-1)。
静态速度误差系数
系统对单位斜坡(速度)输入的稳态误差是
essls i0m s1G 1(s)s12s1 G (s)
定义静态速度误差系数为
Kv
limsG(s) s0
用静态速度误差系数表示的单位速度输入下
计算机控制—史密斯预估器编程
东南大学能源与环境学院实验报告课程名称:实验名称:院(系):专业:姓名:杨康学号:实验室:实验组别:同组人员:实验时间:年月日评定成绩:审阅教师:目录一.实验目的 (3)二.实验内容 (3)三.实验步骤 (3)四.实验分析 (12)实验二 Smith预估控制实验指导书一实验目的通过实验掌握Smith预估控制的方法及程序编制及调试。
二实验内容1.Smith预估控制系统如图所示,图一对象G(S)= K·e-τs / (1+TS),K = 1, T1 = 10 s , τ = 5 s ,1Wc(z)采用数字PI控制规律。
2.对象扰动实验画出U(t) = u0·1(t)时,y(t)曲线。
3.Smith预估控制(1)构造Wτ(S),求出Wτ(Z)。
(2)整定Wc(s)(按什么整定?)(3)按图仿真,并打印曲线。
(4)改变Wτ(S)中K,τ(对象不变),进行仿真比较,观察它们对调节过程的影响。
三实验步骤1、对象扰动实验(1)差分方程如附录。
(2)源程序如下:#include"iostream.h"#include"math.h"#include"fstream.h"void main(){fstream outfile("data1.xls",ios::out);double t;double u0;cout<<"请输入采样周期:";cin>>t;cout<<"请输入阶跃幅值:";cin>>u0;double ee=pow(2.718,(-t/10.0));int N;int i;double u[100],y[100];for(i=0;i<100;i++){u[i]=u0;y[i]=0.0;}N=1+5/t;for(i=N;i<100;i++){y[i]=(1-ee)*u[i-N]+y[i-1]*ee;}for(i=0;i*t<100;i++){cout<<y[i]<<'\t';}for(i=0;i*t<100;i++){outfile<<i*t<<'\t';}outfile<<'\n';for(i=0;i*t<100;i++){outfile<<y[i]<<'\t';}outfile.close();}(3)输出结果:当采样周期T=1,阶跃幅值为1时:Y(t)输出数据:0 0 0 0 0 0 0.0951532 0.181252 0.259159 0.3296520.393438 0.451154 0.503379 0.550634 0.593392 0.6320820.667091 0.698768 0.727431 0.753367 0.776835 0.798070.817284 0.83467 0.850402 0.864637 0.877517 0.8891720.899717 0.909259 0.917894 0.925706 0.932776 0.9391720.94496 0.950197 0.954936 0.959224 0.963104 0.9666150.969792 0.972666 0.975267 0.97762 0.97975 0.9816770.98342 0.984998 0.986425 0.987717 0.988886 0.9899430.9909 0.991766 0.99255 0.993259 0.9939 0.99448 0.9950060.995481 0.995911 0.9963 0.996652 0.996971 0.9972590.99752 0.997756 0.997969 0.998162 0.998337 0.9984960.998639 0.998768 0.998885 0.998991 0.999087 0.9991740.999253 0.999324 0.999388 0.999446 0.999499 0.9995470.99959 0.999629 0.999664 0.999696 0.999725 0.9997510.999775 0.999796 0.999816 0.999833 0.999849 0.9998630.999876 0.999888 0.999899 0.999908 0.999917阶跃响应曲线如下:图二2、Smith预估控制(1)差分方程见附录:(2)源程序如下:#include"iostream.h"#include"math.h"#include"fstream.h"void main(){fstream outfile("data1.xls",ios::out);double t,kp,ki;int t1,k;cout<<"请输入Wt(s)中的K:";cin>>k;cout<<"请输入Wt(s)中的迟延时间t:";cin>>t1;cout<<"请输入采样周期:";cin>>t;cout<<"请输入PI调节器的参数kp:";cin>>kp;cout<<"请输入PI调节器的参数ki:";cin>>ki;double ee=pow(2.718,(-t/10.0));int N,N1;int i;double r[100],e1[100],e2[100],cm[100],q[100],u[100],y[100];for(i=0;i<100;i++){r[i]=1.0;e1[i]=0.0;e2[i]=0.0;u[i]=0.0;y[i]=0.0;cm[i]=0.0;q[i]=0.0;}N=1+5/t;N1=t1/t;cout<<N<<'\t'<<N1<<endl;for(i=0;i<100;i++){if(i==0){e1[i]=r[i];cm[i]=0;q[i]=0;e2[i]=e1[i]-q[i];u[i]=kp*e2[i]+ki*e2[i];}if(i>0&&i<N1){e1[i]=r[i]-y[i-1];cm[i]=ee*cm[i-1]+k*(1-ee)*u[i-1];q[i]=cm[i];e2[i]=e1[i]-q[i];u[i]=u[i-1]+kp*(e2[i]-e2[i-1])+ki*e2[i];if(i>=N){y[i]=(1-ee)*u[i-N]+y[i-1]*ee;}}if(i>=N1){e1[i]=r[i]-y[i-1];cm[i]=ee*cm[i-1]+k*(1-ee)*u[i-1];q[i]=cm[i]-cm[i-N1];e2[i]=e1[i]-q[i];u[i]=u[i-1]+kp*(e2[i]-e2[i-1])+ki*e2[i];if(i>=N){y[i]=(1-ee)*u[i-N]+y[i-1]*ee;}}}for(i=0;i*t<100;i++){cout<<y[i]<<'\t';}for(i=0;i*t<100;i++){outfile<<i*t<<'\t';}outfile<<'\n';for(i=0;i*t<100;i++){outfile<<y[i]<<'\t';}outfile.close();}(3)输出结果:以下所涉及到的采样周期均为T=1,PI控制器的参数均为Kp=1,Ki=1;当Smith预估器中的K=1,延迟时间τ=5时(即与对象的特性完全符合):Y(t)输出数据:0 0 0 0 0 0 0.190306 0.421441 0.663641 0.8917551.08676 1.23639 1.37128 1.47104 1.5311 1.549551.52761 1.46956 1.38931 1.29344 1.18983 1.085670.987246 0.89981 0.828799 0.776983 0.745653 0.7345240.741955 0.765251 0.801257 0.846217 0.896223 0.947450.996402 1.04011 1.07631 1.1035 1.1209 1.12848 1.126831.11708 1.10079 1.07973 1.05581 1.03093 1.00680.984919 0.966463 0.952253 0.942744 0.938032 0.937890.941816 0.949101 0.958895 0.970279 0.982333 0.9941951.00511 1.01448 1.02186 1.02698 1.02978 1.030321.02882 1.02561 1.02108 1.01569 1.00987 1.004060.998627 0.993893 0.990086 0.98735 0.985745 0.9852490.985771 0.987163 0.989238 0.991783 0.994581 0.997421.00011 1.0025 1.00445 1.0059 1.0068 1.00715 1.0071.00641 1.00547 1.00428 1.00293 1.00155 1.000220.999027 0.998028 0.997269 0.996773扰动曲线如下:图三当Smith预估器中的K=1,延迟时间τ=2时(即与对象的特性不完全符合):Y(t)输出数据如下:0 0 0 0 0 0 0.190306 0.421441 0.663641 0.9279711.21095 1.50619 1.810532.08577 2.31463 2.489892.60123 2.63889 2.59562 2.46564 2.25095 1.958931.59989 1.18774 0.740093 0.277571 -0.176632 -0.598368-0.963966 -1.25121 -1.44044 -1.51579 -1.4662 -1.28642-0.977633 -0.547714 -0.0112532 0.610765 1.29164 1.999962.700933.358 3.934554.39588 4.71103 4.854644.80862 4.56351 4.11952 3.48712 2.68715 1.750360.716479 -0.367272 -1.44817 -2.47036 -3.37751 -4.11571-4.63639 -4.89916 -4.87439 -4.54543 -3.91026 -2.98249-1.79168 -0.38278 1.18524 2.8415 4.5062 6.09408 7.518558.69603 9.55045 10.0176 10.0494 9.61689 8.713477.35632 5.58704 3.47109 1.09587 -1.43244 -3.99312-6.45626 -8.68888 -10.5616 -11.9554 -12.7687 -12.9234-12.3704 -11.0941 -9.11507 -6.49149 -3.31832 0.2752394.13026 8.06445 11.88 15.3731 18.3435扰动曲线如下:图四当Smith预估器中的K=2,延迟时间τ=2时(即与对象的特性不完全符合):Y(t)输出数据如下:0 0 0 0 0 0 0.190306 0.385225 0.546344 0.7250840.920371 1.11455 1.30834 1.46909 1.59338 1.692661.7608 1.79027 1.78227 1.73766 1.66147 1.560211.43778 1.29949 1.15302 1.00558 0.863901 0.7341210.621319 0.529913 0.463425 0.423874 0.411896 0.4269230.467201 0.529943 0.611457 0.707298 0.812552 0.9221031.03084 1.13389 1.22683 1.30585 1.36793 1.410941.4337 1.43598 1.41848 1.38278 1.33121 1.266721.19274 1.11298 1.03127 0.951381 0.876845 0.8108160.75594 0.714253 0.687116 0.675179 0.67838 0.6959770.726605 0.768367 0.818936 0.875681 0.935797 0.9964341.05484 1.10845 1.15505 1.19281 1.22037 1.236891.24206 1.23609 1.21971 1.19405 1.16064 1.12131.07804 1.03296 0.988182 0.945705 0.907359 0.8747110.849012 0.831146 0.82161 0.820506 0.82755 0.8421020.863208 0.889656 0.920041 0.952835 0.986462 1.01937扰动曲线如下:图五四实验分析当系统是特征方程中含有纯迟延项的时候,系统的闭环稳定性事下降的,当迟延时间τ比较大的时候,系统就会不稳定。
内模控制和Smith预估器
第五节 Smith 预估控制Smith 预估控制方法是在1957年由Smith 提出来的,其特点是预先估计被控系统在基本扰动下的动态特性,然后用预估器进行补偿,力图使被延迟的被控制量超前反映到控制器中,使控制器提前动作,从而显著地减小系统的超调量,同时加速系统的调节过程。
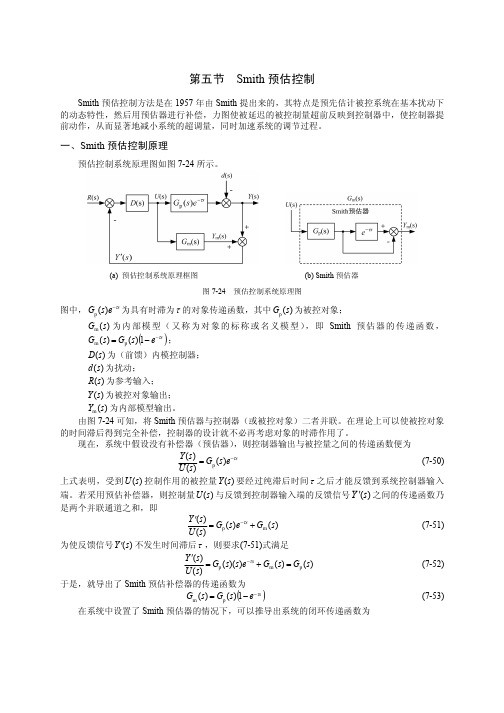
一、Smith 预估控制原理预估控制系统原理图如图7-24所示。
(a) 预估控制系统原理框图 (b) Smith 预估器图7-24 预估控制系统原理图 图中,s e s G τ−)(p 为具有时滞为τ的对象传递函数,其中)(p s G 为被控对象;)(m s G 为内部模型(又称为对象的标称或名义模型),即Smith 预估器的传递函数,()s e s G s G τ−−=1)()(p m ;)(s D 为(前馈)内模控制器;)(s d 为扰动;)(s R 为参考输入;)(s Y 为被控对象输出;)(m s Y 为内部模型输出。
由图7-24可知,将Smith 预估器与控制器(或被控对象)二者并联。
在理论上可以使被控对象的时间滞后得到完全补偿,控制器的设计就不必再考虑对象的时滞作用了。
现在,系统中假设没有补偿器(预估器),则控制器输出与被控量之间的传递函数便为 s e s G s U s Y τ−=)()()(p (7-50) 上式表明,受到)(s U 控制作用的被控量)(s Y 要经过纯滞后时间τ之后才能反馈到系统控制器输入端。
若采用预估补偿器,则控制量)(s U 与反馈到控制器输入端的反馈信号)(s Y ′之间的传递函数乃是两个并联通道之和,即)()()()(m p s G e s G s U s Y s +=′−τ (7-51) 为使反馈信号)(s Y ′不发生时间滞后τ,则要求(7-51)式满足)()())(()()(p m p s G s G e s s G s U s Y s =+=′−τ (7-52) 于是,就导出了Smith 预估补偿器的传递函数为()s e s G s G τ−−=1)()(p m (7-53) 在系统中设置了Smith 预估器的情况下,可以推导出系统的闭环传递函数为)()(1)()()1)(()(1)()(1)1)(()(1)()()()(p p p p p p s G s D e s G s D e s G s D e s G s D e s G s D e s G s D s R s Y s s s s+=−++−+=−−−−−ττττ (7-54) 由上式可以明显看出,在系统的特征方程中,已经不含有s e τ−项。
《自动控制原理》部分中英文词汇对照表(英文解释)

《自动控制原理》部分中英文词汇对照表AAcceleration 加速度Angle of departure分离角Asymptotic stability渐近稳定性Automation自动化Auxiliary equation辅助方程BBacklash间隙Bandwidth带宽Block diagram方框图Bode diagram波特图CCauchy’s theorem高斯定理Characteristic equation特征方程Closed-loop control system闭环控制系统Constant常数Control system控制系统Controllability可控性Critical damping临界阻尼DDamping constant阻尼常数Damping ratio阻尼比DC control system直流控制系统Dead zone死区Delay time延迟时间Derivative control 微分控制Differential equations微分方程Digital computer compensator数字补偿器Dominant poles主导极点Dynamic equations动态方程EError coefficients误差系数Error transfer function误差传递函数FFeedback反馈Feedback compensation反馈补偿Feedback control systems反馈控制系统Feedback signal反馈信号Final-value theorem终值定理Frequency-domain analysis频域分析Frequency-domain design频域设计Friction摩擦GGain增益Generalized error coefficients广义误差系数IImpulse response脉冲响应Initial state初始状态Initial-value theorem初值定理Input vector输入向量Integral control积分控制Inverse z-transformation反Z变换JJordan block约当块Jordan canonical form约当标准形LLag-lead controller滞后-超前控制器Lag-lead network 滞后-超前网络Laplace transform拉氏变换Lead-lag controller超前-滞后控制器Linearization线性化Linear systems线性系统MMass质量Mathematical models数学模型Matrix矩阵Mechanical systems机械系统NNatural undamped frequency自然无阻尼频率Negative feedback负反馈Nichols chart尼科尔斯图Nonlinear control systems非线性控制系统Nyquist criterion柰奎斯特判据OObservability可观性Observer观测器Open-loop control system开环控制系统Output equations输出方程Output vector输出向量PParabolic input抛物线输入Partial fraction expansion部分分式展开PD controller比例微分控制器Peak time峰值时间Phase-lag controller相位滞后控制器Phase-lead controller相位超前控制器Phase margin相角裕度PID controller比例、积分微分控制器Polar plot极坐标图Poles definition极点定义Positive feedback正反馈Prefilter 前置滤波器Principle of the argument幅角原理RRamp error constant斜坡误差常数Ramp input斜坡输入Relative stability相对稳定性Resonant frequency共振频率Rise time上升时间调节时间 accommodation timeRobust system鲁棒系统Root loci根轨迹Routh tabulation(array)劳斯表SSampling frequency采样频率Sampling period采样周期Second-order system二阶系统Sensitivity灵敏度Series compensation串联补偿Settling time调节时间Signal flow graphs信号流图Similarity transformation相似变换Singularity奇点Spring弹簧Stability稳定性State diagram状态图State equations状态方程State feedback状态反馈State space状态空间State transition equation状态转移方程State transition matrix状态转移矩阵State variables状态变量State vector状态向量Steady-state error稳态误差Steady-state response稳态响应Step error constant阶跃误差常数Step input阶跃输入TTime delay时间延迟Time-domain analysis时域分析Time-domain design时域设计Time-invariant systems时不变系统Time-varying systems时变系统Type number型数Torque constant扭矩常数Transfer function转换方程Transient response暂态响应Transition matrix转移矩阵UUnit step response单位阶跃响应VVandermonde matrix范德蒙矩阵Velocity control system速度控制系统Velocity error constant速度误差常数ZZero-order hold零阶保持z-transfer function Z变换函数z-transform Z变换。
《控制工程基础》实验指导书(8学时)
《控制工程基础》实验指导书机械与车辆学院2013实验一matlab软件使用一、实验目的1.掌握MATLAB软件使用的基本方法;2.熟悉MATLAB的数据表示、基本运算和程序控制语句;3.熟悉MATLAB程序设计的基本方法。
4.学习用MATLAB创建控制系统模型。
二、实验原理1.MATLAB的基本知识MATLAB是矩阵实验室(Matrix Laboratory)之意。
MATLAB具有卓越的数值计算能力,具有专业水平的符号计算,文字处理,可视化建模仿真和实时控制等功能。
MATLAB的基本数据单位是矩阵,它的指令表达式与数学,与工程中常用的形式十分相似,故用MATLAB来解算问题要比用C,FORTRAN等语言完相同的事情简捷得多。
当MATLAB 程序启动时,一个叫做MATLAB 桌面的窗口出现了。
默认的MATLAB 桌面结构如下图所示。
在MATLAB 集成开发环境下,它集成了管理文件、变量和用程序的许多编程工具。
在MATLAB 桌面上可以得到和访问的窗口主要有:命令窗口(The Command Window):在命令窗口中,用户可以在命令行提示符(>>)后输入一系列的命令,回车之后执行这些命令,执行的命令也是在这个窗口中实现的。
命令历史窗口(The Command History Window):用于记录用户在命令窗口(The Command Windows),其顺序是按逆序排列的。
即最早的命令在排在最下面,最后的命令排在最上面。
这些命令会一直存在下去,直到它被人为删除。
双击这些命令可使它再次执行。
要在历史命令窗口删除一个或多个命令,可以先选择,然后单击右键,这时就有一个弹出菜单出现,选择Delete Section。
任务就完成了。
工作台窗口(Workspace):工作空间是MATLAB用于存储各种变量和结果的内存空间。
在该窗口中显示工作空间中所有变量的名称、大小、字节数和变量类型说明,可对变量进行观察、编辑、保存和删除。
华中科技大学-自动控制理论基本实验
实验十一二阶系统的模拟与动态性能研究 (3)【实验原理】 (3)【实验目的】 (4)【仿真结果】 (4)【实验设备】 (5)【实验步骤】 (5)【实验结果分析】 (6)【实验思考题】 (8)实验十二二阶系统的稳态性能研究 (11)【实验原理】 (11)1、三角波的产生电路 (11)2、实验使用的系统的分析 (14)【实验目的】 (15)【实验设备】 (15)【实验步骤】 (15)1、阶跃响应的稳态误差: (15)2、斜坡响应的稳态误差 (16)【仿真结果】 (17)【面包板预实验】 (19)1、三角波波形测试 (19)2、稳态响应测试 (19)阶跃响应 (20)斜坡响应 (24)【实验结果】 (25)2、三角波波形测试 (25)2、稳态响应测试 (25)阶跃响应 (26)斜坡响应 (30)【实验思考题】 (31)实验十四线性控制系统的设计与校正 (33)【实验目的】 (33)【实验原理】 (33)【仿真结果】 (35)【实验设备】 (36)【实验步骤】 (37)【注意事项】 (37)【实验结果】 (37)【实验思考题】 (38)实验十六控制系统极点的任意配置 (40)【实验目的】 (40)【实验原理】 (40)【仿真结果】 (42)【实验设备】 (43)【实验步骤】 (43)【注意事项】 (43)【面包板预实验】 (44)【实验结果】 (45)【实验思考题】 (46)实验十一 二阶系统的模拟与动态性能研究【实验原理】二阶系统可用图1所示的模拟电路图来模拟:图 1 二阶系统模拟电路图系统框图为 RCs1--2R R R 2+RCs 1-R(s)C(s)+++-图 2 系统框图简化得)(22R R 2Cs R R 2++RCs 1-R(s)C(s)++2)(Cs 2s C R 22222+++-R R R(s)C(s)由此得传递函数表达式若ζ=0,若ζ=1,若要使ζ<1,需要将R 短路,将调整至6.3k Ω由K 、T 越大超调量越大;K 越大,T 越小,无阻尼自然震荡频率越大。
控制工程实验

实验一二阶系统阶跃响应一、实验目的1.研究二阶系统的特征参数,阻尼比ζ和无阻尼自然频率ωn对系统动态性能的影响。
定量分析ζ和ωn与最大超调量Mp和调节时间t S之间的关系。
2.进一步学习实验系统的使用方法3.学会根据系统阶跃响应曲线确定传递函数。
二、实验仪器1.EL-AT-III型自动控制系统实验箱一台2.计算机一台三、实验原理1.模拟实验的基本原理:控制系统模拟实验采用复合网络法来模拟各种典型环节,即利用运算放大器不同的输入网络和反馈网络模拟各种典型环节,然后按照给定系统的结构图将这些模拟环节连接起来,便得到了相应的模拟系统。
再将输入信号加到模拟系统的输入端,并利用计算机等测量仪器,测量系统的输出,便可得到系统的动态响应曲线及性能指标。
若改变系统的参数,还可进一步分析研究参数对系统性能的影响。
2. 域性能指标的测量方法:超调量Ó%:1)启动计算机,在桌面双击图标 [自动控制实验系统] 运行软件。
2) 检查USB线是否连接好,在实验项目下拉框中选中实验,点击按钮,出现参数设置对话框设置好参数,按确定按钮,此时如无警告对话框出现表示通信正常,如出现警告表示通信不正常,找出原因使通信正常后才可以继续进行实验。
3)连接被测量典型环节的模拟电路。
电路的输入U1接A/D、D/A卡的DA1输出,电路的输出U2接A/D、D/A卡的AD1输入,将两个积分电容连在模拟开关上。
检查无误后接通电源。
4)在实验项目的下拉列表中选择实验二[二阶系统阶跃响应] 。
5)鼠标单击按钮,弹出实验课题参数设置对话框。
在参数设置对话框中设置相应的实验参数后鼠标单击确认等待屏幕的显示区显示实验结果6)利用软件上的游标测量响应曲线上的最大值和稳态值,代入下式算出超调量:Y MAX - Y∞Ó%=——————×100%Y∞T P与T P:利用软件的游标测量水平方向上从零到达最大值与从零到达95%稳态值所需的时间值,便可得到T P与T P。
自动控制原理英文词汇表

1automation 自动化1closed-loop 闭环1open-loop 开环1feedback反馈1closed-loop feedback control system 闭环反馈控制系统1open-loop control system 开环控制系统1negative feedback 负反馈1positive feedback 正反馈1control system控制系统1complexity of design 设计复杂性1design 设计1design gap设计差距1engineering design 工程设计1feedback signal 反馈信号1flyball governor飞球调节器1multivariable control system 多变量控制系统1optimization 优化1plant 对象1process过程1productivity 生产率1risk 风险1robot机器人1specifications 指标说明1synthesis 综合1system 系统1trade-off折中2actuator 执行机构/执行器2assumptions 假设条件2block diagrams框图2characteristic equation 特征方程2transfer function 传递函数2closed-loop transfer function 闭环传递函数2open-loop transfer function 开环传递函数2damping阻尼2damping ratio 阻尼系数/阻尼比2critical damping 临界阻尼2damping oscillation 阻尼振荡2DC motor直流电机2differential equation 微分方程2error误差2error signal 误差信号2final value终值2final value theorem 终值定理2homogeneity齐次性2Laplace transform 拉普拉斯变换2linear approximation 线性近似2linear system线性系统2linearized线性化的chterm translation2linearization线性化2Mason loop rule梅森回路规则2Mason formula梅森公式2natural frequency固有频率/自然频率2necessary condition必要条件2overdamped过阻尼的2poles极点2zeros零点2principle of superposition叠加原理2reference input参考输入2residues留数2signal-flow graph信号流图2simulation 仿真2steady state稳态2s-plane s平面2Taylor series泰勒级数2time constant时间常数2underdamped欠阻尼的2unity feedback单位反馈3canonical form标准型3diagonal canonical form对角标准型/对角线标准型3discrete-time approximation离散时间近似3Euler's method欧拉方法3fundamental matrix基本矩阵3input feedforward canonical form输入前馈标准型3Jordan canonical form约当标准型3matrix exponential function矩阵指数函数3output equation输出方程3phase variable canonical form相变量标准型3phase variable相变量3physical variables物理变量3state differential equation状态微分方程3state space状态空间3state variables状态变量3state vector状态向量/状态矢量3state of a system系统状态3state-space representation状态空间表示/状态空间表达式3state variable feedback状态变量反馈3time domain时域3time-varying system时变系统3time-invariant system时不变系统/非时变系统3transition matrix转移矩阵4closed-loop system闭环系统4complexity复杂度4components组件4direct system直接系统4disturbance signal扰动信号4error signal误差信号4instability不稳定性4loss of gain增益损失4open-loop system开环系统4steady-state error稳态误差4system sensitivity系统灵敏度4transient response暂态响应/瞬态响应4steady-state response稳态响应5acceleration error constant,Ka加速度误差常数,Ka5position error constant,Kp位置误差常数,Kp5velocity error constant,Kv速度误差常数,Kv5design specifications设计要求5domainant roots主导极点5optimum control system最优控制系统5peak time峰值时间5percent overshoot百分比超调/超调量5maximum percent overshoot最大超调量5performance index性能指标5rise time 上升时间5settling time 调整时间5test input signal测试输入信号5tyoe number型数5unit impulse单位脉冲6absolute stability绝对稳定性6auxiliary polynomial辅助多项式6marginally stable临界稳定6relative stability相对稳定性6Rooth-Hurwitz criterion Rooth-Hurwitz判据/劳斯-赫尔维茨判据6stability稳定性6stable system稳定系统7angle of departure出射角7angle of the asymptotes渐近角7asymptote渐近线7asymptote centroid渐近中心7breakaway point分支点7dominant roots主导极点7locus轨迹7logarithmic sensitivity对数灵敏度7number of separate loci根轨迹的段数7parameter design参数设计7PID controller PID控制器7proportional plus derivative (PD) controller比例加微分(PD)控制器7proportional plus integral (PI) controller比例加积分(PI)控制器7root contours根等值线7root locus根轨迹7root locus method根轨迹法7root locus segments on the real axis实轴上的根轨迹段7root sensitivity根灵敏度8all-pass network全通网络8bandwidth带宽8Bode plot Bode图/波德图8break frequency截止频率8corner frequency转折频率8decade十倍频程8Decibel/dB分贝8Fourier transform Fourier变换/傅里叶变换8Fourier transform pair Fourier变换对/傅里叶变换对8frequency response频率响应8Laplace transform pair拉普拉斯变换对8Logarithmic magnitude对数幅值8Logarithmic plot对数坐标图8maximum value of the frequency response频率响应的最大值8minimum phase transfer dunction最小相位传递函数8nonminimum phase system非最小相位系统8polar plot极坐标图8resonant frequency谐振频率8transfer function in the frequency domain频域传递函数9Cauchy's theorem Cauchy定理9closed-loop frequency response闭环频率响应9conformal mapping保角映射9contour map围道映射9gain margin增益裕度/增益裕量9logarithmic (decibel) measure对数(分贝)度量9Nichols chart Nichols图9Nyquist stability criterion Nyquist稳定判据/奈奎斯特稳定判据9phase margin相角裕度/相位裕度9principle of the argument幅角原理9time delay时滞10cascade compensation network串联校正网络10compensation校正10compensator校正装置10deadbeat response最小拍响应10design of a control system控制系统设计10integration network积分网络10lag network滞后网络10lead network超前网络10lead-lag network超前滞后网络10phase lag compensation相角滞后校正10phase lead compensation相角超前校正10phase-lag network相角滞后网络10phase-lead network相角超前网络10prefilter前置滤波11command following给定跟踪11controllability matrix能控性矩阵11controllable system能控系统11detectable能检测11estimation error估计误差11full-state feedback control law全状态反馈控制律11internal mode design内模设计11Kalman state-space decomposition Kalman状态空间分解/卡尔曼状态空间分解11linear quadratic regulator线性二次型调节器11observable system能观系统11observability matrix能观性矩阵11observer观测器11optimal control system最优控制系统11pole assignment极点配置11separation principle分离原理11stabilizable能镇定11stabilizing controller镇定控制器11state variable feedback状态变量反馈12additive perturbation加性摄动12complementary sensitivity function补灵敏度函数12internal model principle内模原理12mulplicative perturbation乘性摄动12process controller过程控制器12robust control system鲁棒控制系统12robust stability criterion鲁棒稳定判据12root sensitivity根灵敏度12system sensitivity系统灵敏度12three-mode controller三模态控制器12three-term controller三项控制器13amplitude quantization error幅值量化误差13backward difference rule后向差分规则13digital computer compensator数字计算机校正装置13digital controll system数字控制系统13forward rectangular integration前向矩形积分13microcomputer微型计算机13minicomputer小型计算机13digital PID controller数字PID控制器13precision精度13sampled data采样数据13sampled-data system采样数据系统13sampling period采样周期13stability of sampled-data system采样数据系统的稳定性13z-plane z平面13z-transform z变换13zero-order hold零阶保持13zero-order holder零阶保持器。
温度大时滞串级—Smith预估控制系统建模与仿真
温度大时滞串级—Smith预估控制系统建模与仿真作者:张程张卓来源:《科技视界》2016年第08期【摘要】本文针对大时滞系统在控制过程中存在的容量滞后较大、调节作用不及时、干扰比较频繁和动态偏差量大等常见问题,建立了温度大时滞串级-Smith预估控制系统的数学模型,该模型有效地改善了系统性能,解决了温度控制品质难以提高的问题。
以典型温度大时滞控制系统——聚合釜温度控制系统为例,通过引入串级-Smith预估控制以改善系统性能,提高温度控制品质。
根据聚合釜温度控制系统的一般特性,进行了聚合釜温度控制系统的系统模型建立和控制器参数整定,并通过MATLAB/Simiulink进行了仿真分析。
实验结果表明,相对于单回路PID控制和串级PID控制系统,采用串级-Smith预估控制系统可以明显改善聚合釜温度控制系统的品质,大幅度降低了大时滞系统中由于容量滞后对系统动态性能的影响,使系统具有更优的动态特性和鲁棒性。
【关键词】大时滞;Smith预估;PID;仿真分析【Abstract】Aiming at common problems of Large time-delay system in control process, such as large capacity lag regulation is not timely, frequent interference and large amount of dynamic deviation, this paper establishes the temperature delay cascade-Smith predictive control system mathematical model. The model can effectively improves the system performance, and solves the problem of difficult to improve the temperature control quality. In this paper, the typical temperature control system with delay-polymerization kettle temperature control system as an example. By introducing the cascade-Smith control to improve system performance and improve the quality of temperature control. According to the general characteristics of polymerization kettle temperature control system, the system model of the temperature control system of polymerization reactor is established and the tuning of the controller, and simulation analysis by MATLAB/Simiulink. Experimental results show that compared with single loop PID control and cascade PID control system, using cascade Smith predictive control system can significantly improve the polymerization kettle temperature control system of quality, greatly reduces the large time delay system due to the capacity of lag effects on the dynamic performance of the system, the system has better dynamic performance and robustness.【Key words】Large time delay; Smith predictor; PID; Simulation analysis0 引言在工业生产过程中,具有时滞特性的控制对象是非常普遍的。
2020控制工程原理实验报告
(理工类)课程名称:控制工程原专业班级:17机械设计制造及其自动化(1)学生学号: 1704021025 学生姓名:吴林凌所属院部:机电工程学院指导教师:刘祥建20 19 ——20 20 学年第二学期金陵科技学院教务处制实验项目名称:Matlab软件使用及典型控制系统建模实验学时: 2 同组学生姓名:实验地点: C306 实验日期: 2020.5.5 实验成绩:批改教师:批改时间:一、实验目的和要求目的:1. 学习 Matlab 的数据表示、基本运算和程序控制语句。
2. 学习用 Matlab创建控制系统模型。
要求:1. 掌握 Matlab 软件使用的基本方法。
2. 掌握用 Matlab产生系统的传递函数模型。
3. 记录程序和运行结果。
二、实验仪器和设备电脑、Matlab软件三、实验过程(1)用Matlab 软件显示如下传递函数的有理多项式模型和零极点增益模型。
(2)用Matlab 软件显示如下传递函数方框图的有理多项式模型和零极点增益模型。
四、实验数据1、实验内容(1)程序及结果记录。
程序有理多项式模型>>num=[12,24,0,20],den=[2 4 6 22];>>sys=tf(num,den)num=[1,3,2,1,1],den=[1,4,3,2,3,2];sys1=tf(num,den)sys=zpk(sys1) 零极点增益模型2、实验内容(2)程序及结果记录。
程序有理多项式模型num1=10;den1=[1,2,0];num2=[5,7];den2=[1,4,2,5];[num,den]=series(num1,den1,num2,den2);sys=tf(num,den)num1=10;den1=[1,2,0];num2=[5,7];零极点增益模型den2=[1,4,2,5];[num,den]=series(num1,den1,num2,den2);sys=tf(num,den)sys1=zpk(sys)实验项目名称:系统时间响应分析仿真实验学时: 2 同组学生姓名:实验地点: C306实验日期: 2020.5.7 实验成绩:批改教师:批改时间:一、实验目的和要求1. 学习瞬态性能指标的测试方法(σ、ts、tp)。
控制工程基础要点回顾控制工程基础

E0 (s) Z2 (s) Ei (s) Z1(s) Z2 (s)
对于LRC电路系统,有:
Z1(s) Ls R,
Z2
(s)
1 Cs
LRC电路系统的传递函数:
1
E0 (s) Cs Ei (s) Ls R
1
LCs2
1 RCs 1
Cs
串联元件的传递函数-负载效应
由基尔霍夫定律,有:
几乎等于CD零(s),/ D因(s)此扰动量
当 G1(s)G2(s的)H增(s)益增大时,
C趋R (近s) /于D(s) 。 1/ H (s)
任何闭环系统,当反馈传递 函数H(s)=1时,系统的输入 量和输出量将趋于相等。
扰动作用下的闭环系统误差传递函数(1)
扰动作用下的闭环系统误差传递函数(2)
举例2:实际物理系统方块图的绘制(5)
要点回顾(1)
➢ 系统的微分方程与传递函数
➢ 机械系统(平移系统、旋转系统):牛顿力学定律 ➢ 电气系统(无源网络、有源网络):基尔霍夫电路定律
➢ 系统的方块图与化简
➢ 闭环系统的方块图及其传递函数 ➢ 参考输入和扰动共同作用下的系统输出与误差表达式 ➢ 实际物理系统方块图的绘制
举例1:系统方块图简化(1)
相加点前移
举例1:系统方块图简化(2)
举例2:系统方块图简化
举例3:系统方块图简化
举例4-6:系统方块图简化
要点回顾(2)
➢ 劳斯(代数)稳定判据及其应用
➢ 闭环控制系统的特征方程与劳斯代数稳定判据 ➢ 闭环控制系统的稳定性及特定参数的取值范围 ➢ 闭环控制系统的临界稳定振荡频率及特定参数取值
扰动作用下的闭环系统误差传递函数(3)
要点回顾(1)
控制工程基础控制系统的频率法分析(2)(控制工程基础)PPT课件
2020/11/23
第八讲 控制系统的频域分析(2)
7
系统开环对数幅频特性的绘制(4)
2. 积分环节:
G2( j)
1
j
对数幅频特性: 与0dB线交于=1rad/s,斜率 为-20dB/dec的直线;
相频特性: -90 °的水平线;
2020/11/23
低频段的斜率为-20NdB/dec(N为串联的积分环节数)。
低频渐近线(斜率为-20NdB/dec的直线)在=1时, L=20lgK,K为系统的开环增益。
在转角频率处,渐近线的斜率要发生变化:
每经过一个惯性环节的转角频率,斜率变化-20dB/dec; 每经过一个振荡环节的转角频率,斜率变化-40dB/dec; 每经过一个比例微分环节的转角频率,斜率变化+20dB/dec; 每经过一个二阶微分环节的转角频率,斜率变化+40dB/dec;
1 j
G3( j ) 1
j 3
G4
(
j
)
1
1 j
2
G5 ( j ) 1
j
1 ( j )2
22
2020/11/23
第八讲 控制系统的频域分析(2)
6
系统开环对数幅频特性的绘制(3)
1. 比例环节:
G1(j)7.5
对数幅频特性: L1()=20lg7.5=17.5 dB 为17.5dB的水平线。
曲线进行修正。
2020/11/23
第八讲 控制系统的频域分析(2)
14
开环系统对数相频特性的绘制
系统的相频特性可以用各环节相频特性 叠加的方法绘制。
工程上,往往用分析法计算各系统相频 特性上的几个点,然后连成曲线。
机械控制工程实验报告
试验一数学模型的Matlab 描述一、实验目的①掌握Malab 中数学模型的三种表现形式 ②掌握三种模型之间的转换方法③掌握复杂传递函数的求取方法④了解复杂系统表现形式及建模方法二、实验要求①在Matlab 中实现三种数学模型的描述②实现三种数学模型之间的转换③写出试验报告三、实验内容Matlab 中数学模型主要有三种形式: 传递函数分子/分母多项式、传递函数零极点增益模型和状态空间模型。
它们各有特点, 有时需要在各种模型之间进行转换。
(1)已知系统传递函数652272)(234+++++=s s s s s s G问题1:在Matlab 中表示出该模型。
问题2: 将其转换成零极点增益型。
(2)已知系统的传递函数2)1)(2()(++=s s s s G 问题1:在Matlab 中表示出该模型。
问题2: 将其转换成状态空间型。
3、已知连续系统∑(A, B, C, D )的系数矩阵是:⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=400140002A ,⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=101B , []011=C ,]0[=D问题1:在Matlab 中表示出该模型。
问题2: 将其转换成分子分母多项式型。
4.用Matlab 表示传递函数为)2)(356)(13()1(5)(2322++++++++=s s s s s s s s s G的系统试验二利用Matlab分析时间响应一、实验目的①掌握impulse函数、step函数和lsim函数的用法②掌握利用三种函数求解系统的时间响应③掌握Matlab中系统时域性能指标的求解方法④了解simulink中系统动态模型的建立方法二、实验要求①用impulse、step和lsim函数对线形连续系统的时间响应进行仿真计算。
②在对系统进行单位阶跃响应的基础上, 求取系统时域性能指标。
③写出试验报告。
三、实验内容(1)impulse函数、step函数和lsim函数的说明Impulse函数step函数lsim 函数(2)求系统二阶系统44.24)()()(2++==s s s R s C s φ的单位脉冲响应、单位阶跃响应、正弦()2sin(t u π=)响应。
控制工程基础-控制系统的频率法分析(3)(控制工程基础)

右半圆。
2021/7/17
.
16
奈氏判据(3)-闭环系统稳定的充分必要条件
设Z为被Cs包围的F(s)的零点数,即闭环系统的右极点数,P为被Cs包围的 F(s)的极点数,即开环右极点数,Cs通过F(s)映射到F平面上的轨迹为CF, k为CF顺时针方向包围原点的次数(在F平面上)。
奈氏判据(5)-与Cs2相应的部分CF曲线
在s平面的Cs2上: slim Rje (~)
在F平面上:
R
22
K m (szj)
F(s)|slimRej R
1
j1
n
(spi)
i1
slimRej
R
一般n>m:
F(s)| sl
i
mRej
1
R
若n=m,则: F(s)|slim Rje1K
2021/7/17
.
30
关于奈氏稳定判据的说明(2-3)
奈氏围线包围了除原点以外的整个右半s平面。 对开环传递函数为G(s)H(s)的N型系统(N1),奈
氏稳定判据可叙述为: 如果G(s)H(s)在右半s平面上有P个极点,则闭环系统
稳定的充分必要条件为s顺时针通过修改后的奈氏围线 时, G(s)H(s)轨迹逆时针方向包围(-1,j0)点P次。 对于N型最小相位系统,闭环系统稳定的充分必要条 件为,当s顺时针通过修改后的奈氏围线时, G(s)H(s) 轨迹不包围(-1,j0)点。
2021/7/17
.
24
关于奈氏稳定判据的说明(1)
由于奈氏图在为正及为负时是对称于实轴的,因 此通常仅画它的为正的部分。
对于开环稳定的系统,只要(-1,j0)不被奈氏图 所包围即可判断闭环系统是稳定的。
进行测验的英语短语
进行测验的英语短语英语老师讲完一个单元后,就会让我们进行测验,以确保我们确实掌握到了那一单元的相关知识。
下面就由店铺为大家带来关于进行测验的英语短语集锦,希望大家能有所收获。
关于进行测验的相关短语1. The subject should be examined in every aspect possible.这个问题要尽可能在所有方面进行测验.2. There will be a test on this next week.下周五将对这个进行测验.3. The teacher tests us every week.老师每周都要对我们进行测验.4. Testing with POMS and 8 SQ, the emotion pattern ofplayers at different levels may be identified.用《心境状态量表》(POMS) 和《8种状态问卷》(8SQ)进行测验,发现了不同水平运动员的不同的情绪模式.5. Students in their classes have to take many quizzes, a midterm exam, and a final exam.他们班里的学生要进行测验、期中考试和期末考试.6. They also give tests, greadworkgrade work , provide lecratory assistance, laboratory assistance andwith students who need help.他们也会进行测验、评定等级、提供试验协助以及帮助那些需要帮助的学生.7. The teacher will test the class on spelling today.今天,老师要对这个班进行一次拼写测验.8. Our teacher set us a stiff test in English.老师对我们进行了很难的英语测验.9. They are having a quiz now.他们正进行小测验.10. We have a dictation every English class.每次上英语课我们都进行听写测验.11. The teacher set the class a comprehension test.老师对全班同学进行了一次理解力测验.12. OK everybody, today we're going to do a physical fitness test, which will soon sort out the men from the boys!大家注意, 今天我们要进行体能测验, 选出真正的男子汉!13. When might you need to give blood for a personality test?什么时候你要进行一个血型测验?14. I'm going to have a physics quiz tomorrow.明天我们将进行物理测验.15. How do you give a hearing test to an elephant?如何对大象进行听力测验呢 ?关于进行测验的相关例句研究员们对女性一个生理周期内的六天进行测验,时间持续六个生理周期或者直到妇女怀孕。
Smith预估控制
东南大学能源与环境学院实验报告课程名称:计算机控制及系统实验名称:Smith预估控制院(系):能源与环境学院专业:热能与动力工程姓名:学号:0301110实验室:金智楼实验时间:2014 年04月07 日评定成绩:审阅教师:一 实验目的通过实验掌握Smith 预估控制的方法及程序编制及调试。
二 实验内容1. Smith 预估控制系统如图所示,对象G(S)= K ·e-τs/ (1+T 1S),K = 1, T1 = 10 s , τ = 5 s ,Wc(z)采用数字PI 控制规律。
2.对象扰动实验画出U(t) = u0·1(t)时,y(t)曲线。
3.Smith 预估控制(1) 构造W τ(S),求出W τ(Z)。
(2) 整定Wc(s)(按什么整定?) (3) 按图仿真,并打印曲线。
(4) 改变W τ(S)中K ,τ(对象不变),进行仿真比较,观察它们对调节 过程的影响。
三 实验步骤 1.拟订实验方案(1)、对象扰动实验,G(S)离散化,采用后向差分1()()()(1)sY s K e G s U s T s τ-•==+ 令 11z s T --= 则有:y(k)u(k)=K ∙e −τTlnz 1+T1T(1−Z −1)整理得:11()(1)()TKu k N T y k y k T T -+-=+ 其中 N Tτ=#include<iostream.h>#include<math.h> #include<iomanip.h>#include<fstream.h>void main(){ofstream ofile("d:\\21.xls");ofile<<"T"<<'\t'<<"u[k]"<<'\t'<<"y[k]"<<'\n';double u0,T,T1=10,a,b,t=5,k=1;double u[100],y[100];int N,i;cout<<"输入采样周期T:\n";cin>>T;cout<<"输入扰动阶跃值u0:\n";cin>>u0;a=exp(-T/T1);b=k*(1-a);N=int(t/T);cout<<'\n';cout<<"T"<<'\t'<<"u[k]"<<'\t'<<"y[k]"<<'\n';cout<<'\n';cout<<0<<'\t'<<0<<'\t'<<0<<'\t'<<'\n';for(i=0;i<100;i++){if(i==0)u[i]=0;elseu[i]=u0*1;if(i<=(N+1))y[i]=0;elsey[i]=b*u[i-(N+1)]+a*y[i-1];ofile<<i*T<<'\t'<<u[i]<<'\t'<<y[i]<<'\n';cout<<i*T<<'\t'<<u[i]<<'\t'<<y[i]<<'\n';}ofile.close();}(2)、Smith 预估控制按照Smith 的控制,构造1(1)()(1)(1)Ts s t K e W s e s T s τ---=-+对其离散化得:1111()(1)1Nt b z W z z a z---=-- 其中 11TT a e -=, 11(1)b K a =- N Tτ≈取整数。