山地果园双轨运输机的应用研究
7YGS_45型自走式双轨道果园运输机设计与实验_邢军军
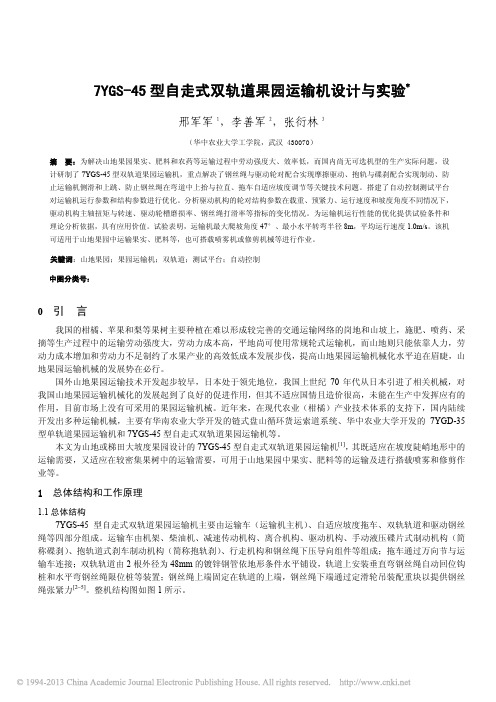
7YGS-45型自走式双轨道果园运输机设计与实验*邢军军1,李善军2,张衍林3(华中农业大学工学院,武汉 430070)摘要:为解决山地果园果实、肥料和农药等运输过程中劳动强度大、效率低,而国内尚无可选机型的生产实际问题,设计研制了7YGS-45型双轨道果园运输机,重点解决了钢丝绳与驱动轮对配合实现摩擦驱动、抱轨与碟刹配合实现制动、防止运输机侧滑和上跳、防止钢丝绳在弯道中上抬与拉直、拖车自适应坡度调节等关键技术问题。
搭建了自动控制测试平台对运输机运行参数和结构参数进行优化。
分析驱动机构的轮对结构参数在载重、预紧力、运行速度和坡度角度不同情况下,驱动机构主轴扭矩与转速、驱动轮槽磨损率、钢丝绳打滑率等指标的变化情况。
为运输机运行性能的优化提供试验条件和理论分析依据,具有应用价值。
试验表明,运输机最大爬坡角度47°、最小水平转弯半径8m,平均运行速度1.0m/s。
该机可适用于山地果园中运输果实、肥料等,也可搭载喷雾机或修剪机械等进行作业。
关键词:山地果园;果园运输机;双轨道;测试平台;自动控制中图分类号:0引 言我国的柑橘、苹果和梨等果树主要种植在难以形成较完善的交通运输网络的岗地和山坡上,施肥、喷药、采摘等生产过程中的运输劳动强度大,劳动力成本高,平地尚可使用常规轮式运输机,而山地则只能依靠人力,劳动力成本增加和劳动力不足制约了水果产业的高效低成本发展步伐,提高山地果园运输机械化水平迫在眉睫,山地果园运输机械的发展势在必行。
国外山地果园运输技术开发起步较早,日本处于领先地位,我国上世纪70年代从日本引进了相关机械,对我国山地果园运输机械化的发展起到了良好的促进作用,但其不适应国情且造价很高,未能在生产中发挥应有的作用,目前市场上没有可采用的果园运输机械。
近年来,在现代农业(柑橘)产业技术体系的支持下,国内陆续开发出多种运输机械,主要有华南农业大学开发的链式盘山循环货运索道系统、华中农业大学开发的7YGD-35型单轨道果园运输机和7YGS-45型自走式双轨道果园运输机等。
山地果园双轨软索运输机械化技术的研发
山地果园双轨软索运输机械化技术的研发开发与研究山地果园双轨软索运输机械化技术的研发宜昌市夷陵区农机技术推广站郑祖江田开凤刘进汤先锡摘要:运用i'r'型槽钢开口对向安装,凹凸地型运用圆弧与切线的原理,分节设计载重拖车,加装失控自动刹车装置.解决了山地果园运输的技术问题,并建成了我国第一条山地果园双轨软索运输机械化线路,提供了我国山地果园运输机械化的模式.关键词:山地果园;机械化;技术夷陵区地处三峡,东与江汉平原相望,西与鄂西山区相连,地势由东向西逐渐升高,形成了东部岗地,西部山区的地形地貌,东部岗地虽然不高,但是坡度陡削,西部山区更是山高坡陡,多数山地坡度在60.左右,行走非常困难.夷陵区虽然地理环境不佳,但具有种植优质蜜柑得天独厚的土壤和环境气候,被纳入全国柑桔优势区域规戈0范围.全区现有优质柑桔2万hm,年产量达到30万t,综合经济收入4.5亿元,是夷陵区三大主要支柱产业之一,是夷陵区人民农村发展,经济增收的主要来源之一.2005年,夷陵区委,区政府提出了建设全国知名的"桔都茶乡"的战略思想,促进了柑桔产业的迅速发展,产量快速增加,规模不断增大.面对迅速发展的柑桔产业和连续增加的柑桔产量,对山地果园的运输能力要求越来越多.由于近年来农村劳动力向其它行业的转移,农村劳动力结构的变化,山地果园的种植环境致使山地果园运输越来越困难,果品上山或下山成为柑桔生产的重大难题,运输工人越来越少,工资连年快速攀升.因此,研究开发山地果园运输机械化技术就显得非常紧迫了.1开发山地果园运输机械化技术的目的开发山地果园运输机械化技术,是为了更好地促进柑桔产业化的发展,为把夷陵区建设成为全国知名的"桔都茶乡"服务,为建设社会主义的新农村服务.(1)开发山地果园的运输机械化生产技术,提高山地果园的机械化生产程度,引导其它农机技术深入到山地果园的生产过程中,开展机械化服务,降低生产成本. (2)降低山地果园的劳动强度,特别是从山地果园中的作业道向主干道的运输,完全由机械化运输方式代替,体现柑桔生产"以人为本"的人性化作业方式.(3)具有可观的经济效益,山地果园运输机械化技术能达到建设成本低,使用费用低,安全可靠,明显降低柑桔生产成本,增加柑农经济收入.2山地果园双轨软索运输机械化的设计和技术路线双轨软索运输机械化原则上解决了山地果园上下的纵向运输.在建设中,考虑人工横向采运距离的方便,一般果园以lOOm横向距离建设一条运输线,左右辐射横向距离50m,双轨软索运输线的长度以人行作业道为准,使其具有最佳的经济效益.(1)采用双轨"【"型槽钢开口相对安装,以确保运输车车轮在"["型槽内运动,而不会受到地形或双轨路线的变化造成脱轨,保证运输车的正常运行.(2)根据果园坡地变形差异,为尽量减少工程量,降低建设成本.轨道地面安装采用14×350mm螺杆,△角铁与轨道安装,螺杆用于调整"["钢轨的平面和双轨之间的平面与平行.湖北农机化》2008年第5期囝开发与研究(3)设计分体式载货拖车,并根据我国果品装载箱54×38×31(mm)的尺寸标准,结合对凹型地区牵引软索与拖车前沿,顶端滑轮的角度,单个拖车载货平面尺寸为54×2+38x2(mm),设计前后轴距为30×2(mm).(4)凹凸路面轨道设计圆弧变形,为尽量减少施工成本,在进行路面整理时,把凹凸路面整理成圆弧形.根据圆弧与切线的相关原理,拖车轮在"『"型槽钢内运行的最小圆弧半径R≥18m.3拖车的设计(1)拖车按照54×2+38×2果品标准箱的尺寸制造分节式拖车,每个拖车4箱2层装载,安装防侧倾,后倾栏杆,每组设计单个拖车3~4节,可运载800~1000kg.(2)为方便多种坡度或地形使用,拖车设置无级调节机构,使载货平面能随坡度进行调平,保证载货稳定和重量中心点靠前,并能在不同坡度的线路上使用.(3)在拖车的前轴上安装意外自动刹车装置,当钢丝绳失去作用时,弹簧拉动三角垫块嵌入前轮与"『"型轨道之间,实施自动停车.4山地果园双轨软索运输机械化动力与软索的选择山地果园的运输大多在60.左右的坡度进行,且坡度长,预计上升拉动质量为750kg,坡长100m,上升坡度为60.,钢丝绳与滑轮的夹角为8.时.采用匀速成上升速度为28rrds的电动卷扬机,经过计算,与拉力匹配的电动机的功率P应为FU=IO06.9W.在实际选择电动机时,应该考虑超过100m以上运距囫《湖北农机化》2008年第5期的需要有一定的超载保险.同时由于电动机动力输出轴与卷扬轮轴受减速箱的尺寸影响,中间的空间距离应有容纳200In钢丝绳的空间,并按4倍比例预留超负荷空间,选用5kW电动卷扬机,配用拉力大于1000kg的钢丝绳.~≥5山地果园双轨软索运输机械化的后续研究和解决的技术问题山地果园双轨软索运输机械化技术的开发和线路建设,由于后期使用费用低,使用年限长,因此具有良好的经济效益.为了使该项技术更完善,仍需要对以下技术进行研究.(1)山地果园双轨软索运输机械化技术因其使用的地理环境和较长的线路,使上下两端的操作联系受到影响,后续研究工作要解决怎样使山地果园双轨软索运输机械化操作统一协调.(2)研究山地果园横向运输的技术方法,与山地果园双轨软索运输机械化相配套,实现山地果园纵横向的完全机械化运输系统.(3)开拓思维领域,开发与山地果园双轨软索运输机械化相匹配的其它技术,使山地果园由纯生产型向生产与旅游观光型发展.(收稿日期:2008—09—28)。
山地果园中农业机械的应用
关键词:山地果园;农业机械;技术推广;智能化1基本情况昆明市西山区现有果园1190.1公顷,不同于北方地势平坦的果园,南方地区果园多依托山坡地建设,可以称之为山地果园,主要种植苹果、桃、梨等果树[1]。
根据《昆明市西山区“十四五”高原特色都市现代农业发展规划(2021—2025年)》,西山区农村发展将重点围绕“四园”(都市菜园、都市果园、都市花园、都市乐园)建设工程,全力打造高原特色都市现代农业核心示范区。
其中“都市果园”的定位也对果园发展提出了更高的要求,要打破传统种植方式,实现机械化、智能化的种植生产。
1)乡村振兴政策推动农业机械化发展。
2021年1月4日,《中共中央国务院关于全面推进乡村振兴加快农业农村现代化的意见》提出:强化现代农业科技和物质装备支撑,提高农机装备自主研制能力,支持高端智能、丘陵山区农机装备研发制造,加大购置补贴力度,开展农机作业补贴。
在政策支撑下,农业机械将纵向延伸到农村基层、横向覆盖到农业生产各方面。
可以预见,在国家深入开展乡村振兴科技支撑行动中,对农业机械的研发和推广将更为重视,为果园引入农业机械提供了重要契机。
2)果园发展农业机械基础条件成熟。
首先,果园土地连片,便于农业机械作业。
承包经营的模式经过历年发展,果园原有面积小、地块散、坡度大的问题得到改善,逐渐形成规模化、集约化、商品化生产模式,土地向专业大户、合作社流转,扩大了果园生产规模,使农业机械连片作业更具可操作性,机械替代人力更具可行性。
其次,果园购置农业机械资金充足,一方面果园自身经营能带来可观收入,经营户敢于投入更多资金购置农业机械;另一方面国家给予的农业机械购置补贴力度越来越大,一定程度上减轻了购置经济压力。
总体来看,果园现有基础条件完全能满足发展农业机械化的要求。
3)劳动力短缺,人力成本上升倒逼发展农业机械化。
劳动力资源的稀缺和用工成本的大幅提升给果园经营带来了极大压力,倒逼果园经营户全力引入农业机械替代人工种植。
丘陵山地田间轨道运输机应用效益分析
丘陵山地田间轨道运输机应用效益分析
湖北省农机局付汉强彭仪万芹曾明
湖 北 是 全 国 水 果 生 产 大 省 ,也 是 茶 叶 种 植 大 省 和 出 口 大 省 。全 省 果 园 面 积 为 6 3 3 万 亩 (lhm 2= 1 5 亩 ),7jC果总产 量 近 5 9 4 万 t ,产 值 约 2 2 0 亿 元 ,茶 园 总 面 积 超 过 4 5 5 万 亩 ,茶 叶 产 量 超 过 2 5 万 t ,综 合 产 值 突 破 4 0 0 亿 元 。受地 理 和 气 候 因 素 的 影 响 ,果 园 、茶园大都位于山地和丘陵地区, 因 不 具 备 筑 路 条 件 或 建 路 成 本 过 高 ,难 以 形 成 完 善 的 交 通 运 输 网 络 ,导 致 施 肥 、喷 药 、采 摘 等 生 产 过 程 中 的 运 输 劳 动 强 度 大 ,劳 动 力 成 本 高 。当 前 ,劳 动 力 不 足 和 劳 动 力 成 本 增 加 已 成 为 制 约 果 茶 产 业 发 展 的 重 要 原 因 ,为 实 现 果 茶 生 产 全 程 全 面 、高 质 高 效 机 械 化 ,解 躲 茶 生 产 机 械 化 “最 后 一 公 里 ”问 题 ,助 力 产 业 扶 贫 ,提 高 丘 陵 山 地 运 输 机 械 化 水 平 势在必行。 1 运输机发展历程和应用情况
田 间 轨 道 运 输 机 ,尤 其 是 雜 运 输 机 ,安 装 受 地 形 地 貌 限 制 较 小 ,不 需 要 开 辟 专 用 线 路 ,能 有 效 解 决 农 田 基 础 觀 建 设 中 对 山 体 、植 被 和 原 有 生 态 环 境 破 坏 的 难 题 ,促 进 农 业 生 产 绿 色 高 效 发 展 。同 时 ,从 调 研 情 况 看 ,目前山区果茶业 面 临 的 已 不 仅 仅 是 工 钱 高 的 问 题 ,而 是 再 高 的 工 钱 也 请 不 到 人 的 问 题 ,村 里 年 轻 的 壮 劳 力 都 出 去 打 工 了 ,S卩使有年轻 人 ,也 干 不 来 这 个 苦 差 事 ,年 纪 大 的 人 背 一 天 柑 橘 下 山 ,要 休 息 一 个 星 期 身 体 才 能 恢 复 ,没 人 愿 意 干 。如 果 没 有 好 的 解 决 方 法 ,若 干 年 后 ,相 当 数 量 的 果 园 会 荒 废 掉 。
单轨和双轨运输机在果园中的应用
未来发展方向
32
未来发展方向
国际市场拓展
为了进一步拓展应用领域和市场空间,未来的单轨和双轨运输机将积极开拓国际市场。通 过加强国际交流与合作,提升我国农业装备的国际影响力和竞争力
综上所述,单轨和双轨运输机在果园中的应用前景广阔,未来将迎来更多的发展机遇和挑 战。政府、企业和研究机构应加强合作,加大研发投入,推动技术创新和应用拓展,为农 业现代化的发展贡献力量。同时,还应加强人才培养和国际交流,提升我国农业装备的整 体水平和国际竞争力
x
在设计和制造过程中,应 注重节能减排、降低噪音 和减少对土壤的压实
此外,对于废旧设备和部件的 回收和再利用也应引起重视, 以实现资源的可持续利用
01
经济效益与果园管理效率
经济效益与果园管理效率
单轨和双轨运输机的应用不仅提高了果 园管理的效率,还带来了显著的经济效 益
通过减少人力成本、提高运输效率、降 低果园运营成本等方式,可以增加果园 的产出和收益
智能化与自动化:未来的单轨和双轨运输机将更加智能化和自动化,能够自主 完成更多任务,减少人工干预。例如,通过搭载传感器和AI技术,运输机可以 自动识别果园环境,规划最优路径,自主完成采摘、运输、投放等作业
多功能集成:未来的单轨和双轨运输机将不仅仅局限于运输功能,而是会集多 种功能于一身。例如,除了运输,还可以进行施肥、喷药、灌溉等作业,成为 果园管理的得力助手
通过优化设计、选用低成本材料、提高生产 效率等方式降低制造成本;通过合理的运营 管理、定期维护和保养,降低运营和维护成 本;通过提高运输机的使用效率和功能集成 ,提高经济效益
37
面临的挑战与应对策略
3. 地形适应性及环境适应性
挑战
不同地区的果园地形和环境条件差异较大, 对单轨和双轨运输机的适应性和稳定性提出 了较高要求
山地农业果园运输机械化分析与优化的研究
花卉窑背景下风景园林专业课程与人才培养模式的改革研究”(GH170461)。
参考文献[1]陈停停.提升地方性院校的核心竞争力[J].北京联合大学学报:人文社会科学版,2006.[2]文彤,陈曼芳.地方院校园林专业人才培养模式特色探讨[J].农业科技信息:现代园林,2008(10):70-71.收稿日期:2019-10-14作者简介:郑馨(1977-),女,汉族,吉林长春人,副教授,博士研究生,主要从事寒地城乡景观生态修复与规划设计、城乡景观理论的研究工作。
山地农业果园运输机械化分析与优化的研究吴彦哲1梁洲辅2(1.福建农林大学交通与土木工程学院福建省福州市闽侯县350100 2.南宁师范大学环境与生命科学学院广西省南宁市530001)摘要:农业要发展,不能停滞于人工作业。
从事劳动者老龄化,年轻人不愿从事农业生产工程中的体力劳动,出现断层现象。
重视并发展农业机械化,用机械化来提高作业效率,降低人工作业成本、减轻农户作业强度和难度,加快农业现代化进程,已成为了一个趋势。
本文对山地农业运输机械化进行分析与优化。
关键词:农业;机械化;轨道车;山地果园运输中图分类号:TU986文献标识码:A文章编号:1005-7897(2019)22-0298-02图1投入设备前后具体成本对比1绪论农业机械化是指农活操作由使用人畜力转移为使用机械,手工劳动被机械操作所取代的过程,是农业现代化的重要组成部分。
中国支柱性产业是农业,然而其机械化率却不足20%[1]。
反观,欧美等却早已实现农业机械化转化,并渐渐向专业化和智能化发展。
农业的机械化率高低与生产效率的高低、成本的少多等等息息相关[2]。
农业机械化的目的在于改善农业生产经营条件,不断提高农业的生产技术水平和生产效率,其结果是在保证并提高生产效率的基础上将农民从繁重的体力劳动中解放出来。
目前,我国提高农业机械化率已经成为了一种趋势。
而我国农业运输量占农业总劳动量50%左右,特别山区农业占有60%~70%之高[3]。
一种应用于山地果园双轨运输机的安全制动装置[实用新型专利]
![一种应用于山地果园双轨运输机的安全制动装置[实用新型专利]](https://img.taocdn.com/s3/m/29697a0e9b89680202d825dc.png)
专利名称:一种应用于山地果园双轨运输机的安全制动装置专利类型:实用新型专利
发明人:欧阳玉平,姜飞,欧阳爱国,龚思惠,胡军,李传鑫,钟浩,张馨月,朱慧东
申请号:CN201620979364.3
申请日:20160830
公开号:CN206050789U
公开日:
20170329
专利内容由知识产权出版社提供
摘要:一种应用于山地果园双轨运输机的安全制动装置,它包括制动杆(1)、摩擦夹头(2)、支撑横梁(3)、限位槽(4)、滑槽(5)、支撑杆(6)、滑动头(7)、弹簧(8)、车架(9)、拉头移动板(10)、钢丝绳连接块(11)、载物架底板(12)、护栏(13)、护栏档柱(14),所述车架(9)通过防翻轮连接导轨,所述车架(9)通过铰链连接载物架底板(12),所述载物架底板(12)左右两侧设有竖直的护栏(13),本实用新型能在牵引钢丝绳断裂时,快速的将双轨运输机制动停止,有效的保证山地果农的生命财产的安全,大大提高了山地果园双轨运输机的安全性。
申请人:华东交通大学
地址:330000 江西省南昌市昌北经济开发区双港路
国籍:CN
更多信息请下载全文后查看。
果园电动双轨运输机启停控制的研究与试验

第55卷㊀第1期河南农业大学学报Vol.55㊀No.12021年㊀㊀2月Journal of Henan Agricultural UniversityFeb.㊀2021收稿日期:2020-06-08基金项目:国家重点研发计划项目(2017YFD0700903-2);湖南省重点研发计划项目(2018NK2063,2019NK2141);湖南省科技厅青年基金项目(2020JJ5234);湖南省教育厅优秀青年基金项目(20B292)作者简介:胡文武(1984 ),男,湖南湘乡人,讲师,博士研究生,主要从事农业生产智能控制理论与技术研究㊂通信作者:吴帆(1995 ),男,江苏淮安人,助理讲师,硕士;蒋蘋(1970 ),男,四川古蔺人,教授,博士㊂引用:胡文武,吴帆,蒋蘋,等.果园电动双轨运输机启停控制的研究与试验[J].河南农业大学学报,2021,55(1):73-79.DOI :10.16445/ki.1000-2340.20210122.020果园电动双轨运输机启停控制的研究与试验胡文武1,吴帆1,2,蒋蘋1,罗亚辉1,石毅新1,胡江银1(1.湖南农业大学机电工程学院,湖南长沙410128;2.湘潭生物机电学校,湖南湘潭411100)摘要:以主动安全防护为出发点,以牵引钢缆运动过程中的受力情况为分析对象,针对电动双轨运输机在启动与停车时沿轨道方向加速度对缆绳存在较大惯性冲击㊁容易破坏限位行程开关等问题,在分析缆绳伸缩影响因素与双轨运输机在启停状态下的加速度变化情况基础上,通过结合电动液压马达,以加速度为控制目标,采用爬坡启动阶梯控制㊁爬坡停车与下坡启动直接控制㊁下坡停车增量式PID 控制的多模式柔性启停控制策略,在满足控制响应性同时,降低缆绳的冲击载荷,缩短下坡停车距离㊂试验证明,在900kg 整备质量下,通过多模式柔性启停控制,爬坡启动加速度相比直接启动峰值降低93%㊂下坡停车阶段时,停车位移缩短4.5cm ,实现了下限位传感器的保护,从而实现对果园牵引式电动双轨运输机的主动安全防护,达到设计预期目标㊂关键词:主动安全;双轨运输机;PID ;多模式柔性启停控制中图分类号:S229.1㊀㊀㊀㊀㊀㊀㊀文献标志码:A文章编号:1000-2340(2021)01-0073-07Research and experiment on starting and stop contronl system oforchard electric double track transportHU Wenwu 1,WU Fan 1,2,JIANG Pin 1,LUO Yahui 1,SHI Yixin 1,HU Jiangyin 1(1.Electromechanic Engineering College,Hunan Agricultural University,Changsha 410128,China;2.Xiangtan Biology and Mechatronics School,Xiangtan 411100,China)Abstract :This study takes active safety protection as the starting point,and takes the force situation oftraction steel cable as the analysis object.Aiming at the problems of large inertia impact on cablecaused by acceleration along track direction during start-up and stop of electric double track transport,and being easy to damage limit travel switch,based on the analysis of influencing factors of cable ex-tension and acceleration change of double rail transport under start-up and stop state,and combinedwith the electric hydraulic motor,taking acceleration as the control target,the multi-mode flexible start-up and stop control strategies were adopted,including climbing start-up step control,climbing stop and downhill start-up direct control,and downhill parking incremental PID control to meet thecontrol responsiveness,reduce the impact load of the cable and shorten the downhill parking distance.The test results show that under the condition of 900kg curb weight,the starting acceleration of climb-ing is reduced by 93%compared with the peak value of direct starting by multi-mode flexible start and stop control.In the downhill parking stage,the parking displacement is shortened by 4.5cm,which realizes the protection of the lower limit sensor,thus realizing the active safety protection of the orchardtraction electric double track transport,and achieving the design goal.Key words :active safety;double track transport;PID;multi mode flexible start stop control74㊀河㊀南㊀农㊀业㊀大㊀学㊀学㊀报第55卷㊀㊀中国南方多丘陵山地,起伏变化的山地㊁梯田使得农机作业环境恶劣,为解决类似桔园㊁油茶林等经济作物的农资,农产品特别是农机作业设备上下山问题,国内一些研究机构研制了各种类型的丘陵山区果园运输机械[1-18]㊂其中,果园运输机的安全防护是研究的重点内容之一㊂在果园运输机被动安全防护研究方面,李学杰[19]研制了钢丝绳的防脱装置,其主要是为预防钢丝绳断开或脱落等引起的载物车向下溜车,通过挡块与轨道立柱的硬阻拦,实现断绳后的停车保护㊂欧阳玉平等[20]研制了纯机械结构的断绳制动装置,断绳制动装置安装在运输机的车架上,由制动杆和上㊁下连接杆组成,制动杆在牵引钢丝绳断裂瞬间,利用自身重力作用向下转动,使得阻拦杆与轨道横梁形成整体,实现运输机的阻拦㊂姜飞[21]开展了牵引式果园运输机断绳制动锁钳优化设计,优化后在350kg载重下进行断绳制动,制动锁钳表面没有出现明显损坏,表现出良好的耐撞性能㊂被动安全防护方面,李震等[22-23]和卢加纳等[24-25]以山地果园钢丝绳牵引式货运机为研究对象,针对该运输机在上㊁下运送货物时碰撞行人㊁障碍物等突发状况,研制出2种基于超声波的避障系统㊂当检测到运输机前方设定距离范围内出现障碍物时,制动器抱闸制动㊂欧阳玉平等[26]利用扫描电镜开展了果园运输机钢丝绳损伤机理研究,得出钢丝断裂是在塑性变形与磨损的共同影响下达到疲劳断裂的结果㊂现有果园运输机的被动安全防护研究以被动安全防护为主体,普遍采用强制停车模式,对轨道支架㊁横梁以及车架存在较大的冲击,且存在二次危害的潜在风险,而主动安全防护集中在障碍物自动停车等方面,对缆绳防冲击断绳主动安全防护的研究较少㊂本研究在电动液压站牵引的纯电动超大坡度电动双轨果园运输机平台上,以降低钢缆冲击力与升缩位移为研究目标,针对运输机上坡启动㊁上坡停止㊁下坡启动㊁下坡停止4个关键状态的加速度情况,分析了钢丝缆绳的受力情况,提出分段不同控制模式的柔性控制技术,可有效地缩短停车位移量,降低缆绳的冲击力㊂1㊀平台系统设计1.1㊀双轨运输机硬件平台整机采用24V/200Ah的铅蓄电池为整机提供电能,利用4kW的电动液压站作为动力源,货箱箱体设计尺寸2.2mˑ1.6mˑ0.5m(长ˑ宽ˑ高),车体自重500kg㊂车体安装液压绞盘,通过运输机本体收放缆绳实现在轨道内的上下移动,并采用断绳保护装置,实现断绳状态下的紧急停车制动,运输机采用遥控操作方式进行操作,整机设计0.1m㊃s-1的移动速度,可满足在50ʎ范围内的陡坡环境下运输需求,其运输机如图1所示㊂图1㊀超大坡度果园电动轨道运输机Fig.1㊀Super slope orchard electric track transport设备安装于湖南省湘潭湘乡市栗山镇西山村的湖南省适机田土改造试验示范基地,相对现有轨道运输机械,该运输机具有较大的货箱,更大的承载质量,便于体积大㊁质量较大的农机设备的运输与转移,实现农机的上山作业㊂其轨道间距为1m,轨道长度为45m,坡度为40ʎ,试验载重为400kg,运输机通过行程开关与轨道极限位置挡块,通过行程开关判断运输机是否运行至轨道极限位置,从而实现双轨运输机实现自动停车保护,如图2所示㊂图2㊀自动停车保护装置Fig.2㊀Automatic stop protection device 行程开关采用三洲集团ME-8108型带金属滚轮自复位开关,调节角度45ʎ,调节摆臂长度为第1期胡文武,等:果园电动双轨运输机启停控制的研究与试验75㊀10cm(极限长度)㊂钢丝缆绳采用10mm 防旋转多股油绳,钢丝绳为19股,每股含7根钢丝,钢丝破断拉力总和为4990kg,额定拉力为2000kg㊂双轨运输机通过D /A 数据转换功能完成1~4V 模拟电压范围的液压站电机转速的采集,从而实现液压泵排量调节与液压绞盘转速㊁运输机加速度的调控㊂该部分采用模块化设计,控制箱㊁液压站㊁动力电池集成于一体,构建集成式控制动力站,其动力站外观如图3所示㊂图3㊀集成动力站Fig.3㊀Integrated power station由于整机质量较大,本研究采用在车架上安装TDK 公司MPU6050六轴倾角模块所制的倾角传感器,配合STC15W4K48S4处理器检测加速度变化,实现拉力相对增加量的检测,有效解决了数据检测的便利性㊁系统稳定性㊁快速响应性与耐用性问题㊂MPU6050六轴倾角模块加速度检测范围为ʃ2g,采样频率为200Hz,采用内建DMP(DigitalMotion Processing)对倾角数据信息进行直接处理,加速度分辨率为0.004m㊃s -2㊂1.2㊀控制系统硬件设计如图4所示,控制系统主要由自制控制器㊁电机控制器㊁加速度传感器㊁拉力传感器㊁倾角传感器等组成㊂其中控制器的CPU 为宏晶科技公司的STC8A8K64S4A12,配备了16通道的开关量控制㊁8通道的A /D㊁D /A 以及无线通信232㊁485通信功能;电机控制器的CPU 与控制器相同,并配备8通道的PWM 控制㊁232通信调试通道与485通信通道,通过电机控制器控制其电机转速调节液压泵的出油量从而改变速度;倾角传感器的主控芯片为宏晶科技公司的STC15W4K48S4,倾角芯片为MPU6050,同时配备了485通信功能,通过RS485串口与控制器通信㊂图4㊀控制系统框图Fig.4㊀Control system block diagram2㊀钢丝缆绳状态分析与试验钢缆在轨道运输机运动过程中,随运动状态的变化而呈现受力变化,在此,首先对运输机运动状态与钢丝缆绳的伸缩㊁受力状况进行分析并获取相关原始试验数据㊂2.1㊀钢丝缆绳伸缩状态分析钢缆在运输机运行过程中,受力的作用,会产生3个阶段的状态变化㊂第一阶段为结构伸长,结构伸长值与钢丝绳的类型和结构㊁负载的大小㊁系统运动频率和次数有密切关系㊂对应本系统所用的钢丝绳,理论结构最大伸长值大约为总长的3%~5%,在转运机爬坡与下坡过程中,受设备自重的影响,通过预张拉力基本可以消除,第二阶段为弹性伸长,钢丝绳基本遵循虎克定律[19],钢丝缆绳的受力的拉升量计算S 为:S =LH Eb =900ˑ45000ˑsin 407000ˑ79.5=56mm (1)式中:S 为钢丝绳伸长量,mm;L 为施加的载荷,kg;由于坡道存在,L =G ˑsin β,其中β为对应地形的坡度角度值,(ʎ);H 为钢丝绳长度,mm;E 为钢丝绳弹性模量,kg㊃mm -2,b 为钢丝绳截面积,mm 2㊂由于液压阀采用开关阀,常规控制方法使得轨道运输机获得较大的加速度,导致缆绳受加速度惯性力叠加,将进一步影响缆绳的伸长量㊂在静态拉伸过程中,同步完成第三阶段伸长,即卷扬机内缆绳将进一步收缩,以消除卷扬机内残余拉力,导致缆绳的进一步延伸㊂在后期,则满足能量守恒定律,进入震荡运行期,直到轨道摩擦力将能量全部消耗殆尽㊂76㊀河㊀南㊀农㊀业㊀大㊀学㊀学㊀报第55卷在分析钢丝绳伸缩状态的基础上,对钢丝绳受力状态进行分析㊂钢丝绳受力情况如图4所示㊂图5㊀钢缆的受力分析Fig.5㊀Stress analysis of steel cable如图5所示,对应坡道角度为β,定义平行轨道朝上加速度为正,平行轨道朝下的运行阻力f 为正,a 为采集的加速度绝对值,根据运输机上坡启动㊁上坡停车㊁下坡启动㊁下坡停车4个状态,获得钢丝绳拉力F 如式(2)所示:F 4ˑ1=1111-111-1-111-1éëêêêêêùûúúúúúˑGᶄma f éëêêêêùûúúúú(2)式中:Gᶄ=mg ˑsin β㊂2.2㊀改进前试验数据获取与分析在改进前进行试验获取相关数据用于后期试验对比,数据采集过程中,运输机整备质量为900kg,液压站工作于额定转速(3200r㊃min -1),通过电磁阀开关实现液压卷扬机的正反转,采集上坡启动加速度㊁上坡停止加速度㊁下坡启动加速度㊁下坡停车加速度,对应加速度-采样次数曲线图,如图6 图9所示㊂爬坡启动的理论加速度α如式(3):α=v t -v 0t =0.1-014/200=1.428m㊃s -2(3)式中:α为爬坡启动的理论加速度,m㊃s -2;v t 为稳定后的行驶速度,m㊃s -1;v 0为初始速度,m㊃s -1;t 为对应加速时间t =n /f ,其中n 为加速度数据的采样次数,f 为采样频率,Hz㊂测试数据的结果与理论预期基本吻合,验证了采用加速度传感器进行检测的可行性㊂通过分析图6曲线可知,在上坡启动过程中,0~0.15s 卷扬机起始加速过程需要克服摩擦阻力与重力分量,钢丝绳绷紧,运输机处于静止状态㊂0.15s 后,当拉力>阻力后,运输机加速到额定运行速度,使得加速度达到1.428m ㊃s -2,进入平稳运行状态㊂图6㊀上坡启动加速度曲线Fig.6㊀Starting acceleration curve ofuphill图7㊀上坡停止加速度曲线Fig.7㊀Acceleration curve of uphill stop通过图7可知,在上坡停车过程中,钢丝缆绳存在一定的震荡运动,受机体重力分量平行于坡面㊁方向与加速度方向反向影响,加速度绝对值最大为0.4m㊃s -2,其加速度数值弹性震荡2次㊂图8㊀下坡启动加速度曲线Fig.8㊀Starting acceleration curve of downhill分析图8可知,在下坡启动过程中,与爬坡启动类似,但受重力方向与加速度方向一致,体现加速度值相比爬坡偏大,加速度绝对值最大为0.49m㊃s -2,无震荡状态发生㊂第1期胡文武,等:果园电动双轨运输机启停控制的研究与试验77㊀图9㊀下坡停止加速度曲线Fig.9㊀Acceleration curve of downhill stop通过图9可知,在下坡停止过程中,重力分量与加速度叠加,加速度最大达到0.88m㊃s-2,导致钢丝绳有较大长度的位移,且发生了4次震荡运动,在触碰接近开关后,实测停车位移量达到10cm,行程开关会受到破坏㊂通过分析可以看出,启停状态对钢丝缆绳的拉力有一定的影响,其中,上坡启动加速度对钢丝绳拉力影响最大,但下坡停车在触碰行程开关后的第一次朝下运动位移对钢丝绳的位移影响较大,因此,确定以降低加速度对钢丝绳影响㊁下限位行程开关极限位移为控制目标的柔性停车控制技术㊂2.3㊀运输机柔性启停控制的基本原理根据现场安装的限位传感器机械尺寸,传感器的轨道对应位移量为最大为86mm,下限位行程开关呈30ʎ安装,柔性控制位移量以该参数为极限尺寸参数㊂系统的控制策略分为4个部分,爬坡启动阶段,由于无线遥控指令的解码有效最短周期为0.1s,启动停止切换最短时间周期为0.2s,已经接近启动所需的过渡时间0.215s,不需要考虑控制的延时影响,因此,该阶段控制采用阶梯控制策略,分定速控制阶段与变速控制2个阶段,如式(4)-式(5):v=0.02m㊃s-1㊀㊀(a=0)(4)v=0.02+0.01t㊀㊀(a>0)(5)第一阶段,通过固定的液压站控制电压输入实现定速控制(试验获得对应0.02m㊃s-1移动速度下的液压站控制电压为2.24V),消除钢丝绳的残余延伸,此时,整机处于停止状态㊂在检测到加速度后,缆绳拉紧运输机开始移动,运输机移动速度与卷扬机速度一致,进入第二阶段,采用受控加速度控制策略,整机加速度受液压卷扬机控制,对应加速度为0.01m㊃s-2㊂在上行停车第一个震荡周期中,加速度方向平行轨道向下,降低了缆绳拉力值,且位移量值符合能量守恒定律,在整机质量较大的情况下,位移量明显低于86mm,满足控制需求.㊂因此,该阶段采用直接停机操作方式㊂下坡启动时,从式(3)分析可知,在加速阶段缆绳所受拉力低于匀速运动状态,无需关注停车位移,所以,该部分采用直接启动控制策略㊂下坡停止时,对应ma与Gᶄ方向一致,但与阻力方向相反,控制策略主要关注停车位移量(防止破坏限位行程开关)㊂对应运输机的位移,采用对加速度进行时域积分方式获得位移量㊂根据加速度获得t时刻的速度,如式(6):v(t)=v(0)+ʏt0a(t)d t(6)式中:v(t)为当前的速度值,m㊃s-1;v(0)为稳定后的行驶速度,其中v(0)值为0.1,m㊃s-1;ʏt0a(t)d t 为对加速度积分㊂对应速度积分,获得当前位移值,如式(7):d(t)=d(0)+ʏt0v(t)d t=ʏt0(v(0)+ʏt0a(t)d t)=0.1ʏt0d t+ʏt0a(t)d t(7)式中:d(0)初始位移值为0,m㊂对应总位移量S1㊁加速度a,如式(8)和式(9):S1=d(t)+LH Eb(8)a=(mg sinβ-f-F)/m(9)式中:F为钢丝绳拉力,f为摩擦力㊂对于公式(8)进行约束计算,其限制S2最大值为60mm,低于极限位移86mm,代入数据可以获得α=0.078m㊃s-2,由此,对轨道运输机的位移控制转换成对加速度值的控制㊂3㊀试验与分析为获得良好的控制效果,系统采用PID控制算法[20]实现对车体运行加速度的控制,从而实现柔性停车,其控制原理如图10所示㊂试验通过RS485接口与PC机通信采集加速度数据,数据传输速率为200Hz,通信波特率为78㊀河㊀南㊀农㊀业㊀大㊀学㊀学㊀报第55卷115200b㊃s-1㊂移动距离检测采用卷尺测量挡板到达车架距离的变化量实现停车移动距离的测量㊂图10㊀PID控制逻辑图Fig.10㊀PID control logic diagram试验评价标准:由于上坡停车㊁下坡启动对缆绳拉力㊁行程开关损坏没有影响,试验仅对上坡启动与下坡停车2个阶段进行数据测试,以最大加速度值评价爬坡启动控制性能,以震荡频率和最大位移量评价下坡停车柔性控制性能㊂通过上坡启动测试试验,获得900kg整备质量的上坡启动测试数据曲线图,如图11所示㊂图11㊀负载900kg上坡启动加速度曲线Fig.11㊀Starting acceleration curve of900kg uphill从图11可以看出,由于卷扬机的拉升力矩足够大,可以有效克服机体重量与摩擦力的双重作用㊂前阶段,卷扬机低速收缩缆绳,卷扬机以0.02 m㊃s-1的线速度转动,拉力不足以克服运输机的摩擦阻力与重力分量,运输机处于停止状态,当拉力与摩擦力及运输机重力分量平衡后,卷扬机以较低的加速度直接拉动运输机,在单个采样周期内,即完成了加速运动,实现了加速度的直接提升,加速度提升与卷扬机后期加速度一致,达到稳定的0.01m㊃s-2,未出现加速度突变,相比硬启动方式,启动加速度降低了93%,有效地降低了加速度对缆绳拉力的叠加㊂下坡停车PID控制参数调整采用临界比例法进行参数整定,调试过程中,采用外部给定信号模拟行程开关停车信号方式,防止行程开关由于挡块极限位置限制导致行程开关损坏㊂首先对K p值从0.5开始,以0.1步长递增,在Kp=1.2时加速度开始0.078m㊃s-2以为中心进入临界震荡状态,对应震荡加速度曲线如图12所示㊂图12㊀临界比例度参数整定曲线Fig.12㊀Critical scale parameter setting curve从图12可以看出,在比例度1.2时,即比例系数K p=1.2时,系统进入震荡状态,震荡周期为0.52s,第一次朝下运动到加速度为0时间为0.96 s,对应位移量实测为76mm,但最大加速度值达到0.104m㊃s-2㊂根据PID临界震荡调节法规则式(10),在获得临界震荡周期T k,对应比例系数K p基础上,代入数据,能够获取实际控制参数K p=2,T i=0.26s, Td=0.065s㊂Kp=1.76Ti=0.5T kTd=0.125T kìîíïïïï(10)式中:K p为控制器放大系数,T i为控制器积分时间常数,T d为控制器微分时间常数㊂通过整定参数对系统进行实际调试测试,加速度曲线图如图13所示㊂图13㊀柔性控制后的加速度曲线Fig.13㊀Acceleration curve after flexible control由图13可知,PID算法在下坡停车的第一个周期内有效的控制的下坡道加速度,并在0.25s左右有效的控制运输机达到设定的0.078m㊃s-2的预设加速度,并在0.7s左右到达最大位移位置,其实测最大位移为5.5cm,相比无柔性控制下缩短4.5cm,震荡第1期胡文武,等:果园电动双轨运输机启停控制的研究与试验79㊀次数1.5次后停止,总运动时间为0.94s㊂4 结论本研究以果园电动双轨运输机的主动安全防护为研究出发点,针对牵引钢缆在工作过程中存在的启停冲击㊁拉升伸缩导致启停状态升缩不受控制等问题,分析钢丝缆绳在上坡启动㊁上坡停止㊁下坡启动㊁下坡停止4种状态下的受力状态,以加速度数据为分析对象,提出爬坡启动采用阶梯控制策略㊁爬坡停车与下坡启动采用直接控制策略㊁下坡停车采用增量式PID控制的多模式柔性启停控制方法,在整备质量900kg情况下,上坡启动加速度降低93%,在下坡停车加速度为0.078m㊃s-2情况下,其实测最大位移为5.5cm,相比无柔性控制下缩短4.5cm,使得运输机下行停车位移相对下限位行程开关位移极限位移处于安全范围内㊂多模式柔性启停控制方法有效地降低了加速度对缆绳的冲击,控制下坡停车位移,防止对下限位传感器的破坏,提升了系统的主动安全防护性能㊂参考文献:[1]㊀张兴义,隋跃宇.土壤压实对农作物影响概述[J].农业机械学报,2005,36(10):161-164.[2]㊀杨洲,李雪平,李君,等.果园钢索牵引悬挂式货运系统关键部件设计[J].农业工程学报,2014,30(7):18-24.[3]㊀刘斌,尹红征,毕庆生,等.中国农业信息网络技术体系的建立及发展刍议[J].河南农业大学学报,2000,33(2):184-188.[4]㊀洪添胜,苏建,朱余清,等.山地橘园链式循环货运索道设计[J].农业机械学报,2011,42(6):108-111. [5]㊀李善军,邢军军,张衍林,等.7YGS-45型自走式双轨道山地果园运输机[J].农业机械学报,2011,42(8):85-88.[6]㊀朱余清,洪添胜,吴伟斌,等.山地果园自走式履带运输车抗侧翻设计与仿真[J].农业机械学报,2012,43(S1):19-23.[7]㊀LI S J,XING J J,ZHANG Y L,et al.Construction of7YGS-45type orchard transport automatic control testplatform[J].Advanced Materials Research,2011,1169:1396-1401.[8]㊀XING J J,LI S J,ZHANG Y L.Main parameters calcu-lation and performance test of7YGS-45type self-pro-pelled dual-track orchard transport[J].Advanced Mate-rials Research,2012,1742:232-237.[9]㊀张俊峰,李敬亚,张衍林,等.山地果园遥控单轨运输机设计[J].农业机械学报,2012,43(2):90-95. [10]王宝山,王淼森,王万章,等.高地隙履带车转向性能试验[J].河南农业大学学报,2017,51(3):335-340.[11]罗瑜清,洪添胜,李震,等.山地果园电动单轨运输机控制装置的设计[J].西北农林科技大学学报(自然科学版),2016,44(3):227-234.[12]吴帆,蒋蘋,胡文武,等.牵引式作业机具自动调平控制系统的研究[J].河南农业大学学报,2020,54(3):439-445.[13]洪添胜,苏建,朱余清,等.一种可移动式山地果园货运系统:CN102806918A[P].2012-12-05. [14]KUNIHISA M,OSAMU S,OSAMU K,et al.New tech-nologies and systems for high quality citrus fruit produc-tion,labor-saving and orchard construction in mountainareas of Japan[J].Journal of Mountain Science,2005,2(1):59-67.[15]张俊峰,张唐娟,张衍林.山地橘园遥控牵引式无轨运输机的设计[J].湖北农业科学,2012,51(10):2111-2113.[16]文韬,洪添胜,朱余清,等.山地果园索道张紧调节自动控制装置的设计[J].农业工程学报,2011,27(6):128-131.[17]刘杰,张衍林,张闻宇,等.山地果园无动力运输机设计[J].华中农业大学学报(自然科学版),2017,36(1):117-122.[18]胡江银,孙松林,胡文武,等.电动双轨山地运输车机械结构设计[J].时代农机,2018,45(9):233-236. [19]李学杰.自走式山地果园单轨运输机的研制[D].武汉:华中农业大学,2013.[20]孟亮,张衍林,张闻宇,等.遥控牵引式无轨山地果园运输机的设计[J].华中农业大学学报(自然科学版),2015,34(4):125-129.[21]姜飞.牵引式果园运输机断绳制动锁钳优化设计与性能分析[D].南昌:华东交通大学,2018. [22]李震,洪添胜,卢加纳,等.山地果园牵引货运机的障碍物测控装置及其测控方法:CN102259625A[P],2011-11-30.[23]李震,卢加纳,洪添胜.山地果园钢丝绳牵引货运机超声波避障系统[J].农业机械学报,2011,42(10):116-120.[24]卢加纳,洪添胜,冯瑞珏,等.山地果园钢丝绳牵引货运机避障系统的研制[C].中国农业工程学会2011年学术会论文集,重庆:2011:474-479. [25]卢加纳,李震,洪添胜.山地果园牵引式货运机避障系统的设计与试验[C],中国农业机械学会青年学术年会,2011.[26]欧阳玉平,孙晗,洪添胜,等.果园运输机钢丝绳损伤机理的扫描电镜研究[J].电子显微学报,2019,38(2):159-164.[27]吴刚,胡胜飞,魏洋,等.预应力高强钢丝绳加固桥梁动静态力学性能的测试分析[J].公路交通科技,2009,26(1):66-76.(责任编辑:蒋国良)。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
山地果园双轨运输机的应用研究
现代机械化运输在山地果园作业中的作用日益重要。
山地果园的地形复杂多变,普通的轮式、履带式运输机不适宜在该地形工作,而轨道运输则能适用于山地果园起伏变化的地形,现今国内外学者针对上述情况,研制出依靠于轨道运行的单轨、双轨山地果园运输机。
目前,双轨运输机已经进入产业化阶段,利用双轨运输机在山坡地进行运输,近些年来取得了一定的进展和成果,与此同时,在山地果园双轨运输机发展进程中,尚存一些技术方面的问题有待继续研究。
标签:山地果园;双轨运输机;机械化;应用推广
引言
由于山地特殊的地形特点,在果园运输中,传统人力运输、拖拉机运输等运输方式无法高效展开。
传统柑橘的种植缺乏規划且立地条件差,柑橘树生长在难以形成较为完善交通运输网络,甚至是呈陡坡梯田状的山地上[1]。
这导致常规运输车难以在山地果园推广使用,并对成熟柑橘果实运输造成较大的困难[2-3]。
我国人口趋于老龄化、年轻劳动力向城市迁移等情况,直接导致了山地果园产业人力资源的匮乏。
山地果园运输的困难以及劳动力的短缺,让我国山地果园轨道化运输成为解决问题的关键,而双轨运输机相对于单轨运输机在运行过程中具有更好的稳定性。
在当下劳动力欠缺,轮式运输车污染排放严重且运输机器笨重的情况下,为了提高山地果农的运输效率与经济效益,降低果农的劳动强度与生产成本,国内外学者对山地果园双轨运输机进行了广泛的研究。
文章旨在通过对国内外学者在山地果园双轨运输机的研究现状进行分析,总结出当下存在的问题并提出解决方案和未来研究方向。
1 国外研究现状
20世纪60年代以来,国外果园机械化进程快速发展,欧美国家尤其是美国的果园机械化发展程度较高,果园运输机种类丰富。
欧美国家果园多为平坦地形,因此欧美国家以研制轮式运输机为主。
在果园运输方面,韩国果农的果园里安装了多条单轨运输线,用来运输各种各样的物资,如果实、农药和化肥等,两端有装置可实现自动停车功能,操作简单且方便。
日本富士トレラ制作所株式会社根据日本的实际情况研发了轮式运输机,有便于操作的搬运台,其定位装置使稳定性与灵活性得以提高[4]。
ヤンマ株式会社研发的多功能轮式农用运输机,采用无级变速和液压自卸装置[5]。
与我国南方丘陵地带地形相似,日本对此研制出了双轨式运输机,用于山坡地果园运输。
日本的双轨运输机轨道两端各自有一个驱动滚筒,在轨道两端通过钢丝绳对运输机施加预紧拉力,利用滚筒对钢丝绳的摩擦力驱动运输机上下行驶。
该双轨运输机的运行过程平稳,可靠性高且投入成本较低。
但其轨道没有设
定角度,所以只适用于较小坡度的直线运输。
运输机的载重可达250kg,最大爬坡角度为35°,运行速度为1.2m/s。
目前其研究方向是将运输机轻简化、灵活化,让果园运输机能更好地在山地丘陵等地形稳定运行[6]。
2 国内研究现状
近年来国内在山地果园双轨运输机的设计研究上取得较大的进步,其研究从最初的实用性,过渡到安全性,现逐步向安全实用性的方向发展。
国内学者针对双轨运输机各个方面进行研究,多种创新技术被相继提出,双轨运输机的安全性能更是受到了重视,比如,双轨运输机的断绳制动技术在不断改进。
为防止断绳事故的发生,欧阳玉平及其团队研制了一种纯机械结构的断绳制动装置[7]。
制动杆在牵引绳断裂瞬间,利用自身重力向下转动,顶住轨道横梁,使运输机及时制动。
纯机械制动装置的反应速度快,相比于电子制动装置,它的制造成本低,结构更为简单。
徐宁及其团队针对断绳点处在距离制动杆较远位置的情况,设计了一种摩擦制动的装置[8]。
松绳或断绳时,在复位弹簧作用下,移动杆的缺口与支撑杆重合,此时,支撑杆下压,摩擦片与轨道接触,实现紧急制动。
运输机在运行时,钢丝绳容易出现乱序现象,严重时钢丝绳堆积缠绕在一起,偏离滚筒,驱动装置失效,运输机失去控制,产生安全隐患。
对此,欧阳玉平等利用卷扬机滚筒转动提供驱动力并配备钢丝绳松脱自动张紧装置,实现钢丝绳在卷扬机滚筒上有序紧凑的排列[9]。
国内双轨运输机安全性能方面技术的应用,在一定程度上避免了事故的发生,为安全生产作出了巨大的贡献。
3 问题与展望
近几年来,国内双轨运输机的研究发展取得一定的成绩,如华南农业大学研制的固定式双轨运输机,华中农业大学研制的自走式大坡度双轨运输机,还有一些公司企业根据山地地形研制出的新型的运输机,在部分地区的果园已经投入使用,并获得一定的成绩。
果园运输机的机械化进程发展快速,但由于发展过程中受地形、技术、成本等多种因素的限制,果园运输机械化还有很大的发展空间和前景。
目前山地果园双轨运输机在使用过程中,依然存在一些问题:(1)目前机械设备比较沉重,使得在山地的搬运过程变得困难;(2)在坡度较大的山地运输时存在翻车的安全隐患;(3)除了收获季节以外,运输机的日常使用率低等等。
综合考虑以上问题,根据国内外发展现状,为了进一步提高山地果园机械化水平,加快其机械化发展速度,笔者认为,未来山地果园轨道运输机的发展可从以下几个方面进行研究:(1)对运输机结构等方面进行优化设计,实现运输机的轻简化。
在运输机功能完整,安全性能得到保障的情况下,通过对运输机的结构进行分析,结合实验测试,合理选用运输机的材料、部件等,设计出更为轻便的车身和动力系统,降低运输机整体结构质量,增强零件的总体性能,达到轻简化的目的。
运输机的安装、拆卸过程能够节省更多的人力物力,提高了运输机的可操作性。
(2)运输机的轨道、车身可拆装。
轨道设计为3米一节,利用螺栓让节与节之间稳固相连。
轨道的可拆装使轨道轻简便携,能够在不同地方进行铺设,大大增强了果园运输的灵活性。
传统的运输机车身结构一体化,在搬运过程中机
械沉重且占用大量空间。
新型结构可拆装的运输机,在车身的护栏、支架、载货板之间都可以进行拆卸和组装,让农户使用和搬运过程变得简单、方便;设计简单易懂的运输机操作、安装、拆卸流程,对农户进行详细培训,做到相关知识的普及,让农户能够掌握运输机的基本操作,为山地果园机械化进程的发展打好基础。
(3)提高运输机的安全性能。
在断绳制动方面做到进一步精确化,在保证断绳时制动杆能实现制动功能的情况下,还要排除下坡时可能出现因短暂松绳而造成制动杆的误制动问题;对防翻轮的结构进行优化设计,使运输机在轨道上发生重心偏移时能够更好地防止出现侧翻事故;车身前端考虑添加弹簧避震装置,在大坡度行驶时能够让车轮同时与轨道接触,减轻运输过程中车身震荡。
这些安全装置和措施大大提高了运输机的安全性能。
(4)注重开发果园运输机的多功能使用。
轨道运输机除了可以运载果物以外,还能推广到搭载农药、果园喷雾、灌溉和剪枝等方面的应用。
将运输机融入到果园作业当中,提高运输机的利用率。
从而能够有效降低果农的劳动强度和生产成本,进一步提高工作效率和经济效益,这样对于山地果园轨道运输机的推广应用具有积极的推动作用。
山地果园双轨运输机的研究还有很多方面的进展,在科技飞速发展的今天,我们有理由相信,双轨运输机将朝着自动化和智能化的方向发展,在果园生产劳动中发挥更大的作用。
参考文献
[1]洪添胜,杨洲,宋淑然,等.柑橘生产机械化研究[J].农业机械学报,2010,41(12):105-110.
[2]沈兆敏,柴寿昌.中国现代柑橘技术[M].北京:金盾出版社,2008:19-22.
[3]中国柑橘学会.中国柑橘产业[M].北京:中国农业出版社,2008:17-21.
[4]株式会社富士トレラ作所.管理作:日本,2006345740
A[P].2006-12-28.
[5]ヤンマ株式会社.多目的搬:日本,201111677A[P].2011-01-20.
[6]李敬亚.山地果园单轨运输机的研制[D].武汉:华中农业大学,2011.
[7]欧阳玉平,洪添胜,苏建,等.山地果园牵引式双轨运输机断绳制动装置设计与实验[J].农业工程学报,2014,30(18):22-28.
[8]徐宁,欧阳玉平,洪添胜,等.山地果园单向牵引式双轨运输机摩擦制动装置设计与试验[J].广东农业科学,2015(5):127-132.
[9]欧阳玉平,洪添胜,苏建,等.山地果园牵引式双轨运输机排绳装置的设计[J].华中农业大学学报,2014,33(5):123-129.。