使用GA-PID方法电动助力转向系统优化的设计(EPAS)
电动助力转向系统
第1章绪论1.1电动助力转向系统概述随着科学技术的飞速发展,汽车各方面的性能都有了很大的发展,但同时人们对汽车的性能也有了更高的要求。
为了取得更好的汽车性能,充分利用机械和电子两方面的优势,提供机电一体化的解决方案,日益被业界人士推崇为有效的应对策略。
虽然汽车是机械技术的完美再现,但是由于机械技术在短期内不会再有很大的突破,而电子技术正越来越体现出其相对而言更优越的地方,所以研制机、电相结合的汽车相关部件正成为当前的主要趋势。
转向系统作为汽车的一个重要组成部分,也同样顺应这样的发展趋势。
就目前而言,应当说也已经找到了比较完美的解决方案。
汽车助力转向系统是用于改变或保持汽车行驶方向的专门机构。
其作用是使汽车在行驶过程中能够按照驾驶员的意图,适时地改变其行驶方向,能与行驶系统配合共同保持汽车持续稳定地行驶。
汽车方向盘助力系统经历了从机械助力到液压助力(hydraulic Power steering HPS)再到电子液压助力系统(electric hydraulic power steering EHPS)这三个阶段的演变。
经过多年的探索,电动助力转向(Electric Power Steering ,简称EPS)作为一种全新的动力转向模式走入了业界的视野,并且很快成为动力转向系统研究与开发的的热点。
由于电动助力转向系统相对于液压动力转向系统有着诸多的优点,因此电动助力转向系统及其相关配套的部件的研究与开发正愈来愈备受各主要汽车生产企业的青睐。
电动助力转向系统(EPS,Electric Power Steering)是未来转向系统的发展方向。
该系统由电动助力机直接提供转向助力,省去了液压动力转向系统所必需的动力转向油泵、软管、液压油、传送带和装于发动机上的皮带轮,既节省能量,又保护了环境。
另外,电动助力转向系统还具有调整简单、装配灵活以及在多种状况下都能提供转向助力的特点。
正是因为由于有了这些优点,电动助力转向系统作为一种新的转向技术,部分取代了液压动力转向系统(Hydraulic Power Steering,简称HPS)。
盘点汽车底盘五大新技术介绍及应用

盘点汽车底盘五大新技术介绍及应用一、 ESP(ESC、VSC)电子稳定控制系统技术介绍:ESP的英文全称是Electronic Stability Prog ram,中文意思是“电子稳定控制系统”。
也可称作ESC或VSC。
ESP主要是在紧急情况下对车辆的行驶状态进行主动干预,它整合了ABS和TCS的功能,并且增加横摆扭矩控制——防侧滑功能,可以防止车辆在高速行驶转弯或制动过程中失控。
如图1左侧所视,车辆前轮侧滑,车辆出现转向不足。
此时,VSC系统通过制动器对内后轮施加一定的制动力,由此产生一个逆时针的力矩,改进车辆转向能力。
如图1右侧所视,车辆后轮侧滑,出现车辆甩尾和过度现象。
此时,VSC系统通过制动器对外前轮施加一定的制动力,由此产生一个顺时针的力矩,保证车辆的稳定性。
ESP系统主要在大侧向加速度、大侧偏角的极限工况下工作。
它利用控制左右两侧车轮制动力或驱动力之差产生的横摆力矩来防止出现难以控制的侧滑现象,保证车辆的路径跟踪能力,提高了车辆在高速行使时的安全性。
研究估计ESP降低了30%-50%的轿车单车致命事故和50%-70%的SUV单车致命事故。
技术应用情况:2008年全球的VSC装配率达到33%当今在欧洲和美国,每两辆新乘用车和轻型商用车就有一辆装配了ESP。
美国和欧洲的立法者最近都做出决定,要求强制装配ESP。
2011年9月起,美国所有4.5吨以下车辆都必须装配ESP。
2014年11月起,欧洲所有乘用车和轻、中、重型车辆都要求装配ESP。
在2008年,我国只有约11%的新车装配了ESP。
随着今年国内车市新车型的不断推出,目前我国20万元以上新车配备ESP的比率大幅提高,像别克新君越[综述图片论坛]、新天籁[综述图片论坛]、雅阁[综述图片论坛]八代等都装配了ESP。
相信随着我国车市的进一步发展,电子稳定控制系统一定会如同当今的ABS一样,成为我国汽车的一个标准安全配置。
二、 TCS 牵引力控制系统技术介绍:TCS的英文全称是 Traction Control System,中文意思是“牵引力控制系统”。
P-Eps(PinionElectricPowerSteering)齿轮式电动助力转向系统
P-Eps (Pinion Electric Power Steering) 齿轮式电动助力转向系统EPS,电动助力转向。
也可以叫EPAS。
其最大优点是可以随速控制助力,在低速时提供较大助力,保证轻便转向;在高速时减小助力,提供驾驶员足够的路感。
EPS只在转向时发挥作用,因此不像液压转向会一直对发动机造成额外负担,从而减小油耗,同时没有不可回收件,更加绿色,从各方面满足环保的需求。
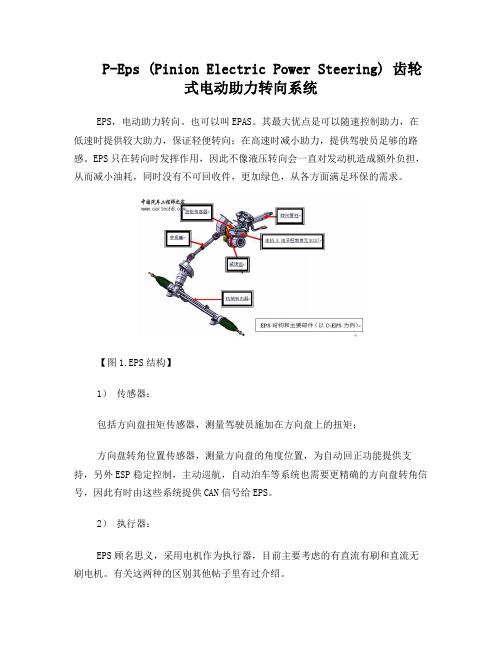
【图1.EPS结构】1)传感器:包括方向盘扭矩传感器,测量驾驶员施加在方向盘上的扭矩;方向盘转角位置传感器,测量方向盘的角度位置,为自动回正功能提供支持,另外ESP稳定控制,主动巡航,自动泊车等系统也需要更精确的方向盘转角信号,因此有时由这些系统提供CAN信号给EPS。
2)执行器:EPS顾名思义,采用电机作为执行器,目前主要考虑的有直流有刷和直流无刷电机。
有关这两种的区别其他帖子里有过介绍。
3)减速机构:电机输出的扭矩经过减速机构加载到转向系统上。
形式有蜗轮蜗杆式,循环球式,差动轮系和摇臂机构等等,前两者比较常见,也跟EPS的形式有关(参见EPS分类)。
4)电子控制单元:EPS的电子控制单元可以跟车上其他部件通信,处理传感器信号,通过程序计算出需要的助力大小,并转换成控制信号输出给驱动电路,驱动电动机输出扭矩。
5)转向机构:跟常规转向机构类似。
EPS的分类:主要分3大类,根据电机在转向机构中耦合位置和方式的不同。
1) C-EPS转向柱式(Column Electric Power Steering):直接在转向柱上安装,可以从常规转向改进而来,简单,成本低;缺点是噪音大,振动不好控制,会直接传到方向盘上,传递扭矩也较小。
2) P-EPS小齿轮式(Pinion Electric Power Steering):结构较紧凑,且提高了系统的刚度;但电子部分工作环境差(安装位置距离前桥近),要求耐温,防水,抗干扰等性能高,提高了成本。
参考基于ga的pid参数调整
目录摘要:------------------------------------------------------------------------------------------------------3 ABSTRACT--------------------------------------------------------------------------------------------------4 第一章绪论-------------------------------------------------------------------------------------------- 51.1 课题研究背景-----------------------------------------------------------------------------------51.2 PID参数调整方法综述-----------------------------------------------------------------------61.3 本文主要研究内容--------------------------------------------------------------------------- 14 第二章PID控制及其MATLAB仿真---------------------------------------------------------- 152.1 引言---------------------------------------------------------------------------------------------152.2 PID控制的基本原理------------------------------------------------------------------------ 152.3 模拟PID控制及其MATLAB仿真----------------------------------------------------- -162.4 数字PID控制及其MATLAB仿真------------------------------------------------------ 182.4.1 位置式PID控制算法------------------------------------------------------------------182.4.2 增量式PID控制算法------------------------------------------------------------------192.5 小结-------------------------------------------------------------------------------------------- 20 第三章遗传算法------------------------------------------------------------------------------------223.1 引言-------------------------------------------------------------------------------------------- 223.2 遗传算法概述-------------------------------------------------------------------------------- 223.2.1 遗传算法的发展史-----------------------------------------------------------------------223.2.2 遗传算法的概念--------------------------------------------------------------------------243.2.3 遗传算法的特点--------------------------------------------------------------------------253.2.4 遗传算法的基本用语--------------------------------------------------------------------253.1.5 遗传算法的研究方向--------------------------------------------------------------------263.3 遗传算法的工作原理------------------------------------------------------------------------273.4 遗传算法的模式定理----------------------------------------------------------------------- 333.5 小结-------------------------------------------------------------------------------------------- 34 第四章遗传算法工具箱-------------------------------------------------------------------------- -354.1 引言-------------------------------------------------------------------------------------------- 354.2 遗传算法工具箱结构------------------------------------------------------------------------354.3 遗传算法工具箱通用函数------------------------------------------------------------------374.4 小结---------------------------------------------------------------------------------------------43 第五章基于GA算法参数调整的PID控制系统---------------------------------------------445.1 引言-------------------------------------------------------------------------------------------- 445.2 基于GA算法参数调整的PID控制系统的结构----------------------------------------445.3 基于GA算法参数调整的PID控制系统的仿真----------------------------------------465.3.1 基于GA算法参数调整的PID控制系统的具体实现---------------------------465.3.2 5.3.2 仿真研究与结果分析---------------------------------------------------------- 495.4 小结---------------------------------------------------------------------------------------------51第六章总结与展望----------------------------------------------------------------------------------526.1 总结---------------------------------------------------------------------------------------------526.2 展望---------------------------------------------------------------------------------------------53致谢------------------------------------------------------------------------------------------------------54参考文献------------------------------------------------------------------------------------------------55 附录------------------------------------------------------------------------------------------------------56基于GA的PID参数调整摘要PID控制已有80余年历史,由于其算法简单、鲁棒性好和可靠性高,被广泛应用于工业过程控制,尤其适用于可建立精确数学模型的确定性控制系统。
电动助力转向ECU激励信号系统设计-开题报告

学Hale Waihona Puke 姓名 指导教师姓名系部 职称
汽车与交通工程学 院
教授
从事 专业
专业、班级 车辆工程 是否外聘 □是■否
题目名称
汽车电动助力转向 ECU 激励信号系统设计
一、课题研究现状、选题目的和意义 (一)研究现状
随着社会生活水平提高和消费者需求多样化,现代汽车的性能和配置不断地提高,增加了汽 车工程测试的复杂程度。汽车工程测试中,经常需要测量多种信号并进行分析,如车速、转向盘 转角、横摆角速度、侧倾角、俯仰角、横向加速度、纵向加速度、车体变形、电压、电流、温 度、CAN 总线信号、油液压力、真空度等。一方面,汽车工程测试不断向着多物理量、高精度、 大数据量、自动化的方向发展,另一方面,传统仪器由于功能固化、数据处理及分析能力差、存 储数据量少等原因,越来越难以满足现代化汽车测试的需要。为了方便 ECU 的开发与测试,除 了真实的汽车环境外,往往还需要些模拟的汽车环境用于 ECU 实验室阶段的开发和测试。汽 车电动助力转向 ECU 激励信号系统的开发主要使用各种信号模拟系统产生各种真实的电动助 力转向信号(例如方向盘扭矩信号和车轮车速信号)来驱动 ECU 的正常工作。而现在 ECU 激 励信号系统还利用了 VI 公司的 LABVIEW 虚拟仪器技术,开发上位机操作界面,通过 USB 与 数据采集卡连接,上位机可以很好的实现系统各种信号的显示和控制。
四、进度安排 (1)熟悉任务书,了解相关信息,准备资料,填写开题报告:第 1~2 周(2 月 28 日~3 月 13 日) (2)信号理论分析:第 3~4 周(3 月 14 日~3 月 27 日) (3)信号激励系统硬件选择与接口设计:第 5~6 周(3 月 28 日~4 月 10 日) (4)信号激励系统软件设计:第 7~13 周(4 月 11 日~5 月 22 日) (5)实验分析:第 14 周(5 月 23 日~5 月 29 日) (6)毕业设计评阅、审核及修改不足:第 15~17 周(5 月 30 日~6 月 12 日)
电动助力转向系统分析

国内汽车厂商起步较晚,但开发速度很快,在轿车EPS系统开发上 已有成果。2002年北斗星汽车在国内首次安装进口的EPS带动了电动 助力转向系统的研究和开发,国内学者才开始研制开发汽车EPS产品, 我国的EPS控制系统的研究与开发工作尚处在起步阶段,少数高校和 研究机构从事该课题的研究,主要处于实验室研发阶段。
2、EPS系统的国内外研究状况及关键技术
2.1、EPS系统的国内外研究状况 2.2、EPS系统的关键技术
2.1、EPS系统的国内外研究状况
2.1、EPS系统的国内外研究状况
在国外,EPS系统首先是在小排量轿车上发展起来的。上世纪80 年代初期,日本铃木公司首次在其Cervo轿车上安装了EPS系统,随 后还应用在其Alto车上。此后,EPS在日本得到迅速发展。出于节能 环保的考虑,欧、美等国的汽车公司也相继对EPS进行了开发和研究。 虽然比日本晚了10年时间,但是欧美国家的开发力度比较大,所选择 的产品类型也有所不同。 在此之后,电动助力转向系统得到迅猛发展。日本的大发汽车公 司、三菱汽车公司、本田汽车公司、NSK和Koyo公司、美国的 Delphi汽车系统公司、TRW公司,德国的ZF公司、英国的Lucas公司 都相继研制出各自的EPS。在世界汽车行业中,EPS的年增长量达到 130万~150万套。目前,国外中型以上的货车和中级以上的轿车上几 乎都广泛采用这一技术装置。
4.2、EPS系统的结构类型
4.2、EPS系统的结构类型
电动助力转向根据作用位置的不同主要有三种结构。这三种结构 分别是对转向轴助力式、齿轮助力式和齿条助力式。
1.转向轴助力式:转向轴助力式电动助力转向机构的电动机布置 在靠近方向盘的下方,通过蜗轮蜗杆机构和转向轴链接。
2.齿轮助力式:齿轮助力式电动助力转向机构的电动机布置在 与转向器主动齿轮相连接的位置,再通过驱动主动齿轮实现助力作用。 3.齿条助力式:齿条助力式电动助力结构的动机和减速机构等 布置在齿条处,并直接驱动齿条实现助力。
汽车ESP硬件在环仿真试验台搭建毕业论文

汽车ESP硬件在环仿真试验台搭建毕业论文目录第1章绪论11.1选题意义与背景11.1.1汽车电子产品的开发方法与硬件在环仿真11.1.2车身电子控制与汽车主动安全的发展与研究21.1.3本文研究的主要容21.2硬件在环仿真基础理论21.2.1硬件在环仿真的概念31.2.2硬件在环仿真的开发背景与优点31.2.3硬件在环仿真的形式与组成部分31.3汽车防抱死制动系统(ABS)61.3.1 ABS的基本工作原理61.3.2 ABS硬件在环仿真的实现81.4汽车电子稳定性程序(ESP)81.4.1 ESP的基本工作原理81.4.2 ESP硬件在环仿真的实现方法101.5本文研究容14第2章试验台的硬件建设142.1 试验台硬件系统总体方案142.1.1 ABS/ ESP的比较142.2.2 ESP的硬件在环仿真实验台方案142.2 Dspace实时仿真系统152.3 液压控制单元172.4 制动系统与操纵系统182.5 传感器182.6 信号采集电路192.6.1 限幅电路202.6.2 滤波电路202.6.3 隔离电路212.6.4 信号采集电路212.7 实验台架222.8 其他硬件23第3章试验台的软件建设233.1 车身二自由度操纵稳定性数学模型243.2 车辆两轮三自由度直线行驶数学模型283.2.1 车身模型293.2.2 轮胎模型313.2.3 动力传动系模型323.2.4 车辆两轮三自由度数学模型353.3 车辆四轮七自由度数学模型353.3.1 车身模型363.3.2 轮胎模型443.3.3 动力传动系模型463.3.4 制动器模型483.3.5 车辆四轮七自由度数学模型49第4章仿真结果分析504.1 基于Matlab/Simulink的离线仿真504.1.1 模型参数设定504.1.2 油门控制车辆直线加减速工况仿真514.1.3 制动轮缸压力控制车辆直线加减速工况仿真55 4.1.4 转向角控制车辆稳态转向工况仿真564.2 基于Dspace的实时仿真614.2.1 Matlab/Simulink与Dspace的无缝连接614.2.2 无I/O接口的实时仿真624.2.3 有I/O接口的实时仿真654.2.4 仿真结果分析68第5章全文总结与工作展望68致谢69参考文献69附录71第1章绪论1.1选题意义与背景1.1.1汽车电子产品的开发方法与硬件在环仿真近年来,人们对提高汽车的动力性和经济性以与降低排放的呼声越来越强,同时对汽车的安全性和舒适性的要求也越来越高,这种趋势促进了汽车技术,尤其是汽车控制技术的发展。
汽车电动助力转向系统硬件设计

汽车电动助力转向系统硬件设计摘要:绿色环保背景下电动汽车被提出,电动汽车结构与传统汽车差异较大,其中电动助力转向系统更是具备环保、节能等特性,因此,在对其进行设计时,应注重其与传统转向系统的差异,并着重注意硬件设计。
本文以汽车电动助力转向系统构成为基础,继而提出汽车电动助力转向系统的硬件设计,以供参考。
关键词:电动汽车;转向系统;硬件设计引言:近几年,电动助力转向系统(EPAS)发展迅速,国外已有全新或改进的系统投入使用。
从长远来看,为中小型车配备电动助力转向系统是汽车转向系统发展的一个重要趋势,国内对电动助力转向系统的研究也很重要。
但由于种种原因,国内的研究大多集中在电动助力转向系统的动力学分析和建模上,尚未针对电动助力转向系统种的硬件设计进行探究,为此,有必要在未来发展中对其展开深入剖析。
一、汽车电动助力转向系统构成电动助力转向系统符合现代汽车机电一体化的设计思想,主要由以下部件组成:电子控制单元(FCU)、速度和扭矩传感器、伺服电机、驱动机构和转向柱部件。
关键是电子控制单元,它在很大程度上决定了电动助力转向的控制效率。
电动转向系统的具体支持是:在车辆启动或低速时操作方向盘并将其安装在转向柱上。
扭矩传感器不断检测作用在转向柱上的扭矩,并向电子控制系统发送信号和速度信号。
处理器计算并处理输入信号以确定辅助扭矩的大小和方向,从而控制发动机的电流和方向,并最终为驾驶员提供辅助转向动力。
在如今车流密集化环境内,针对更多不同水平的驾驶人群, 汽车的操纵设计显得尤为重要,如果车速超过某个阈值或发生错误,EPAS将退出支持模式,转向系统将切换到手动转向模式[1]。
二、汽车电动助力转向系统硬件设计1.电机设计(1)EPS系统控制电路的分层设计。
嵌入式EPS系统硬件主要包括整车点火信号、功率监测、扭矩角传感器、转速传感器、负载传感器信号处理、辅助电机驱动和电流反馈、A/D转换、电磁离合器驱动等模块,系统通信和系统错误诊断。
新能源汽车电子转向自动控制系统优化设计
F-5718HB3401 1.8 0.95 3.7 3.1
2.2
1.04
2.2 同步带传动设计
同步带转动在设计过程中,已知传动比 i 为 2;电机最
大输出静转矩为 2.8N·m;最大转向负载力矩为 2.3 N·m;
主动转速 n1 为 300r/min;同步带中心距 a 为 330m。因此, 同步带功率计算方法如式(1)所示。
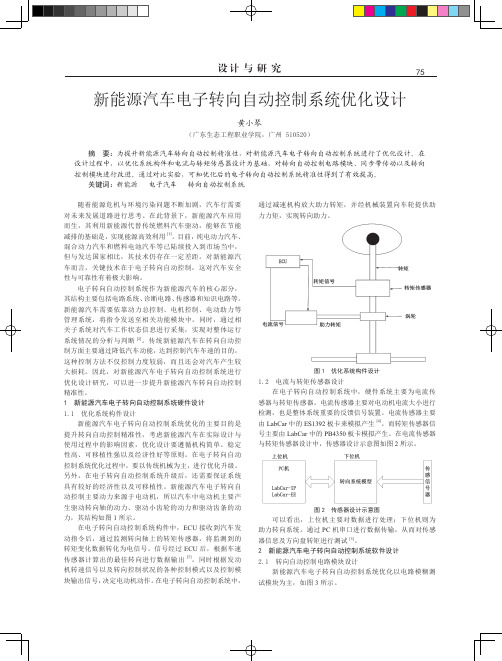
在电子转向自动控制系统构件中,ECU 接收到汽车发 动指令后,通过监测转向轴上的转矩传感器,将监测到的 转矩变化数据转化为电信号。信号经过 ECU 后,根据车速 传感器计算出的最佳转向进行数据输出 [3]。同时根据发动 机转速信号以及转向控制状况的各种控制模式以及控制模 块输出信号,决定电动机动作。在电子转向自动控制系统中,
通过减速机构放大助力转矩,并经机械装置向车轮提供助 力力矩,实现转向助力。
图 1 优化系统构件设计 1.2 电流与转矩传感器设计
在电子转向自动控制系统中,硬件系统主要为电流传 感器与转矩传感器。电流传感器主要对电动机电流大小进行 检测,也是整体系统重要的反馈信号装置。电流传感器主要 由 LabCar 中的 ES1392 板卡来模拟产生 [4]。而转矩传感器信 号主要由 LabCar 中的 PB4350 板卡模拟产生。在电流传感器 与转矩传感器设计中,传感器设计示意图如图 2 所示。
图 2 传感器设计示意图 可以看出,上位机主要对数据进行处理;下位机则为 助力转向系统。通过 PC 机串口进行数据传输,从而对传感 器信息及方向盘转矩进行测试 [5]。 2 新能源汽车电子转向自动控制系统软件设计 2.1 转向自动控制电路模块设计 新能源汽车电子转向自动控制系统优化以电路模糊测 试模块为主,如图 3 所示。
型号
新能源快速功率调节PID算法的应用和优化
新能源快速功率调节PID算法的应用和优化作者:周岳来源:《科技风》2021年第01期摘要:随着能源转型的不断推进,新能源接入比例不断提高,为保证送端大电网的稳定,大电网要求各新能源场站能够迅速调节全站功率输出。
由于新能源设备的响应特征差异较大,可能存在响应滞后、调节速度限幅等问题,传统PID算法难以获得稳定高效的调节效果。
本文为解决上述问题,使用前馈、动态积分参数、不完全微分等方式改进PID算法,使用遗传算法整定调节参数,优化PID控制器对不同设备的调控能力,加快新能源场站输出功率的调节速度、稳定性和抗干扰能力,提高电能质量和供电可靠性。
关键词:PID算法;动态积分参数;功率控制;新能源发电最近十五年以来,随着世界各国常规化石能源供应不确定性问题和节能减排形势的日益严峻,绿色可再生能源和环保型低碳经济越来越受到重视。
随着市场需求和技术的发展,风电、光伏等装机容量也迅速增大。
尤其最近十年,中国光伏和风电装机容量的增长极为迅速,并已于2010年年底超越美国成为全球风电装机容量第一的国家,于2016年超越德国成为光伏发电量世界第一的国家。
我国各个地区新能源装机量都有大幅度增加,尤其是西北地区,新能源装机总量已经超过35%,新能源渗透率不断升高,挤占了常规水电、火电等具备转动惯量的常规能源[1]。
因风电、光伏不具备快速频率响应能力,电网频率控制特性的结构性问题也愈发明显。
为解决上述问题,西北、华中、南网等各个区域电网,陆续推行新能源场站快速频率响应功能的应用工作。
目前对新能源场站的要求为利用有功控制系统或其他装置来实现系统的功率调节,以实现快速频率响应(一次调频)功能,功率于频率的关系满足频率-功率下垂特性曲线。
本文从改善传统PID控制功率控制的稳定性出發,考虑实际新能源设备的响应特性,对PID控制算法进行优化,以实现新能源场站输出功率的快速稳定控制。
一、新能源场站的功率控制(一)新能源设备的响应特性各个新能源设备厂家的设备响应特性有所差异,对于全站功率控制而言,一般可将设备简化为带少量纯滞后的一阶线性模型。
基于PID算法的移动机器人转向系统研究
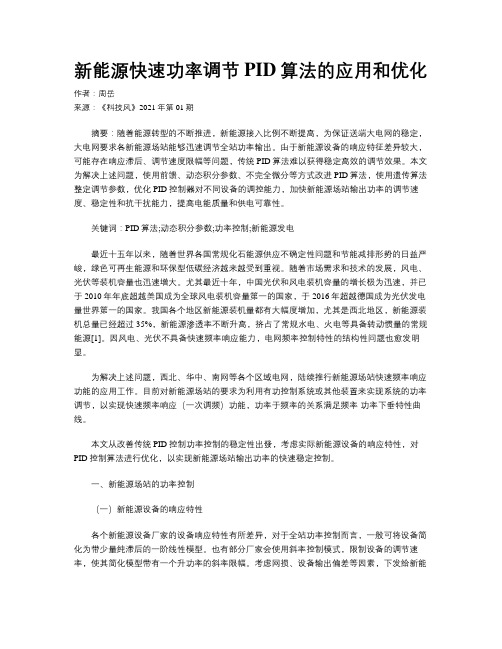
基于PID算法的移动机器人转向系统研究作者:周华春董子琦来源:《环球市场》2019年第25期摘要:本文针对传统的智能机器人转向系统存在转向反应慢,耗费时间长,精度差,不方便维护等缺点提出一种基于PID算法的移动机器人转向系统研究,该转向系统主要由舵机,直流电机,ARM处理核心,转向系统框架等组成。
其转向原理通过舵机pid闭环控制系统实现机器人转向,可以解决传统机器人转向精度差,反应慢等问题。
关键词:智能机器人;转向系统;PID算法;舵机在现代企业生产技术不断提高的过程中,越来越多的企业在产品物流管理,产品仓库管理过程中感觉到人手严重不足,在这些方面的管理力不从心。
如果能将智能机器人与物流管理结合起来,将对这些公司的物流管理与运输,生产环节的管理,设备的管理与维修都将起到积极的作用。
一、系统整体结构设计本移动机器人转向系统主要由框架与内部集成电路构成,考虑到机器人系统需要进行不断移动,本系统采用蓄电池作为系统电源,这样解决了常规机器人系统对电源的限制,同时需要将蓄电池固定在机器人内部框架上。
同时该机器人系统还需要处理中心,本系统采用具有ARM内核的stm32f407vet6单片机作为系统的处理器,该处理器频率为168Mhz,同时具有较大容量RAM与EEPROM,具有速度快,价格便宜,稳定性高等特点。
同时该机器人转向系统还需要直流电机与舵机,直流电机安装在后轮用于驱动机器人前进,舵机用于机器人前轮转向。
控制电路用于驱动直流电机,晶振用于提供系统时钟,其总体结构图如图1所示。
二、ARM处理核心设计在进行移动机器人转向系统设计时,我们首先要正确的选择项目的处理器,处理器的选择对于系统而言很重要,如果处理器选的正确合适的话,那么处理器应用这个系统后,系统就会经济,而且工作可靠;如果选择的系统处理器不合适的话,就会造成项目的经济浪费,甚至严重影响处理器应用系统的正常运行,甚至设计出来后根本就达不到预先设计的目标。
使用GA-PID方法电动助力转向系统优化的设计(EPAS)
使用GA-PID 方法电动助力转向系统(EPAS )的优化设计M.K Hassan a *1, N.A.M. Azu bir b, Nizam .H.M.I c, S.F Tohad,2, B.S.K.K Ibrahime,3摘要在现代汽车中,电动助力转向系统(EPAS )正逐步取代传统的转向系统。
EPAS 系统的主要优点是可以减少能源消耗。
本文讨论了使用GA-PID 算法与传统的PID 方法相比来实现节能减排的潜力。
将电刷直流电动机安装在转向柱上,向驾驶员提供辅助转矩,这种配置被称为C-型EPAS 系统。
结果表明与PID 控制器相比,GA-PID 控制器能够最大限度地减少能源消耗。
关键词:电子助力转向系统(EPAS ),C-型EPAS ,GA-PID ,电动汽车。
命名法J m B m K bKaK m L R J s K s B s M r G Rs Tc Td Tas θ m θ电机转动惯量 电机阻尼 电机电动势常数电机扭矩电机刚性 电机电感电机电阻 方向盘的转动惯量 转向刚性 机架阻尼架和车轮总成质量 电机的齿轮比齿轮半径 传感器测量扭矩驱动力矩 辅助转矩方向盘角度 电机的旋转角度1. 前言电池容量的限制一直是电动汽车(EV )的一个主要问题。
因此,一些研究人员已经作出了努力,强调能源效率在每个电动汽车系统中的重要性。
电动汽车将不再使用机械转向系统与液压助力转向系统(HPAS )。
这是由于必需连续地从电池输出电能,以使得液压泵保持压力。
并且它的液压系统也需要定期的维护。
与之相比,电动助力转向系统仅在转动方向盘时消耗的电能。
电动助力转向系统也没有液体介质,机械部件少,更少的容错,最重要的是更加环保[1-3]。
一个典型的的EPAS 系统需要以转向扭矩车速和道路状况作为输入参数,通过辅助电机提供实时协助扭矩 [4]。
它可以在各种工作条件下提供最佳的转向感觉。
有三种类型的EPAS 系统已被广泛使用:转向柱式(C-EPAS ),小齿轮式(P-EPAS )和齿条式(R-EPAS )。
汽车电动助力转向系统硬件设计
收稿日期:2003-11-03 作者简介:李书龙(1979-),男,河南唐河人,东南大学机械工程系硕士研究生,主要从事机电一体化方面的研究。
◇计算机应用◇汽车电动助力转向系统硬件设计李书龙,许 超,杨 智(东南大学机械工程系,江苏南京210096)摘 要:介绍了电动助力转向(EPAS )系统的构成与工作机理,给出了基于80C552的电动助力转向系统的硬件总体框架介绍,并重点介绍了电动助力转向系统的电动机功率驱动电路和保护电路的设计,对所设计硬件系统的台架实验情况进行了介绍与分析。
最后展望了电动助力转向系统设计的发展趋势。
关键词:汽车;电动助力转向(EPAS );单片机;硬件中图分类号:U463.42;T M921.54+1 文献标识码:A 文章编号:1001-4551(2004)01-0005-04H ardw are Design of the E lectric Pow er Assisted Steering SystemLI Shu 2long ,X U Chao ,Y ANG Zhi(Department o f Mechanical Engineering ,Southeast Univer sity ,Nanjing 210096,China )Abstract :The constituents and its operational mechanism of electric power assisted steering system are introduced shortly ,and its hardware framew ork based on the 80C552is presented on the whole ,then the power driver circuit of direct current m otor ,the main component of the electric power assisted steering system ,and circuit to protect the m otor are discussed in detail ,the ex 2periment on the system is introduced and analyzed.Finally the development tendency of the electric power assisted steering system design is expected.K ey w ords :autom obile ;electric power assisted steering (EPAS );single 2chip microcomputer ;hardware1 引 言汽车电动助力转向(Electric P ower Aided Steer 2ing ,EPAS )系统的发展很快,国外不断有新的或改良的系统投入使用。
基于多变化转矩的汽车电动助力转向电机电流跟踪控制
基于多变化转矩的汽车电动助力转向电机电流跟踪控制敖德根;米根锁【摘要】针对汽车电动助力转向(EPS)系统电机实时操控的问题,提出将自适应滑模控制算法应用于汽车EPS系统中,通过设计PID控制器、滑模控制器及自适应滑模控制器来分析验证自适应滑模控制器的优势,最后通过建立汽车转向系统数学模型,并在多变化转矩条件下进行仿真验证.仿真结果表明,PID控制器控制的实际电流与目标电流误差较大,且在不同变化的转矩下,电流跟踪性能较差;滑模控制器控制的实际电流跟随性能较好,但抖振较大;自适应滑模控制器不仅可以提高实际电流与目标电流的吻合度,还可以削弱滑模控制抖振,使汽车在不同方向盘转矩和车速下的电机电流跟踪能力得到改善.%Aiming at the problem of real-time manipulating of motor in vehicle EPS system,an adaptive sliding mode control algorithm was proposed and applied to the vehicle EPS system.The advantages of adaptive sliding mode controller were verified by the design of PID controller,sliding mode controller and adaptive sliding mode controller.Finally,the mathematical model of the vehicle steering system was established,and the simulation was carried out under the condition of varied torque.The simulation results showed that the error between the actual current and the target current was larger with the PID controller,and the current tracking performance was poor under different torque.The performance of the sliding mode controller was better,but the chattering was larger.Adaptive sliding mode controller not only could improve the degree of agreement between the actual current and the target current,but also could reduce the chattering of the sliding modecontrol.The motor current tracking ability of the vehicle was improved under different steering wheel torque and vehicle speed.【期刊名称】《电机与控制应用》【年(卷),期】2017(044)003【总页数】8页(P46-53)【关键词】汽车电动助力转向系统;电流跟踪;多变化转矩;自适应滑模控制【作者】敖德根;米根锁【作者单位】兰州交通大学自动化与电气工程学院,甘肃兰州 730070;兰州交通大学自动化与电气工程学院,甘肃兰州 730070【正文语种】中文【中图分类】TM301.2随着汽车工业的快速发展,汽车电动助力转向(Electric Power Steering,EPS)系统已逐渐代替了传统的液压系统。
电动助力转向综合前馈和模糊PID反馈的电流控制算法
2010年8月农业机械学报第41卷第8期DO I :10.3969/.j issn .1000-1298.2010.08.003电动助力转向综合前馈和模糊PID 反馈的电流控制算法*吕 威 郭孔辉 张建伟(吉林大学汽车动态模拟国家重点实验室,长春130025)=摘要> 针对电动助力转向中的电流跟随控制问题,通过建立系统数学模型,分析系统型别,研究了常规P ID 控制和模糊P ID 控制在电流控制中的不足,采用前馈和反馈综合控制的思想,提出了综合前馈和模糊P I D 反馈的电流控制算法。
通过实验对比表明,前馈和模糊P I D 反馈的综合控制方法可显著提高电流跟随控制的稳定性、快速性和准确性。
关键词:车辆 电动助力转向 电流跟随 前馈控制 模糊P ID 控制中图分类号:U 46114文献标识码:A文章编号:1000-1298(2010)08-0010-06Feed-for ward I ntegrated w ith Fuzzy PID FeedbackCurrent Control A l gorith m i n E lectric Power Steeri ngL W ei Guo Konghui Zhang Ji a n w e i(State K ey Labora t ory of Au t om obile Dyna m ic S i m u l ation,J ilin Universit y,Changchun 130025,China )Abst ractIn order to so l v e the current track i n g contr o l proble m i n e lectric pow er steeri n g (EPS),the syste mm athe m aticalm odelw as established and the syste m type w as ana l y zed,d isadvantages o f the conventi o na l PI D control and fuzzy PI D controlw ere stud ied .Usi n g the feed -for w ard and feedback i n tegrating contro l theory ,a feed -f o r w ard control integ rated w it h fuzzy PI D feedback contro l algo rithm was pr oposed .Experi m ent co m parisons sho w ed that the proposed algo rithm could sign ificantly i m prove the syste m stability ,response rapidity and fo llo w i n g accuracy i n current contr o l of electric po w er steeri n g syste m.K ey w ords V ehic le ,E lectr i c pow er steering ,Current follo w i n g ,Feed -fo r w ard contro,l Fuzzy PI Dcon tro l收稿日期:2010-01-06 修回日期:2010-02-26*国家/8630高技术研究发展计划资助项目(2006AA 110103)作者简介:吕威,博士生,主要从事汽车底盘电子控制研究,E -ma i :l l w asc@l 126.co m引言电动助力转向系统(e l e ctric po w er steeri n g ,简称EPS )是一种采用电动机来辅助驾驶员转向的力矩伺服系统,其核心是电动机控制。
基于GA的自适应PID在直冷机组背压控制的应用
基于GA的自适应PID在直冷机组背压控制的应用白建云;曲燕;李永茂;冯赓;张润元【摘要】Against the dynamic characteristics of non-linear,time-varying,multivariable and large delay in the direct air-cooling back pressure control system of coal-fired power plant.In this paper,the genetic algorithm is applied to PID parameter tuning to form a parameter adaptive PID control strategy based on genetic algorithm(GA).Combined with the mathematical model of back pressure control system for a 300 MW direct air-cooling unit,the results show that the control algorithm is less than the conventional PID control in overshoot,the adjustment time is short,and in the case of object model parameters change,have shown good dynamic performance and steady state performance,with strong adaptive ability.%针对目前燃煤电厂直接空冷背压控制系统具有的非线性、时变、多变量、大迟延等动态特性,文中将遗传算法运用于PID参数整定中,形成基于遗传算法GA的参数自适应PID控制策略,并结合某300MW直接空冷机组背压控制系统数学模型进行仿真.仿真结果表明,该控制算法较常规PID控制具有超调量小、调节时间短的特点,并在对象模型参数改变的情况下,都表现出较好的动态性能和稳态性能,具有较强的自适应能力.【期刊名称】《自动化与仪表》【年(卷),期】2018(033)002【总页数】5页(P77-81)【关键词】遗传算法;背压控制系统;直接空冷机组;自适应【作者】白建云;曲燕;李永茂;冯赓;张润元【作者单位】山西大学自动化系,太原 030013;山西大学自动化系,太原 030013;山西平朔煤矸石发电有限公司,朔州 036800;山西大学自动化系,太原 030013;山西平朔煤矸石发电有限公司,朔州 036800【正文语种】中文【中图分类】TP273在燃煤电厂运行控制中,直接空冷机组的背压是一个极其重要的参数,对背压控制的好坏直接关系到机组的安全经济运行。
大学生方程式赛车后轮转向梯形优化及仿真
大学生方程式赛车后轮转向梯形优化及仿真张祥勃;何耀华【摘要】Compared with the traditional two-wheel steering car,the four-wheel steering car at low speed to the radius of the smaller,with better flexibility,at high speed to avoid obstacles to control the stability of the response better,with better security,can improve the handling of the car.The design combined with the rules required for the rear wheels of the car to select the rocker steering gear,and match the corresponding steering ing the Matlab software to Akemann angle relationship as the expected function,the use of non-linear function of the post-steering trapezoid to ing Simulink to control the target,the proportional control method is used to determine the relationship between the front and the back,and the simulation of the angular step response of the four-wheel steering car and the front wheel only.The optimization and simulation results show that the rear wheel steering trapezoid achieves the desired target and has practical significance for the design of the four wheel steering car.%与传统的两轮转向赛车相比,四轮转向赛车在低速时转向半径更小,具有更好的灵活性;在高速时回避障碍物的操纵稳定性响应更好,具有更好的安全性,能够提高赛车的操纵性.该设计结合规则要求对赛车后轮选择摇块式转向器,并匹配了相应的转向梯形.利用Matlab 软件以阿克曼转角关系为期望函数,利用非线性函数对后转向梯形进行优化.利用Simulink以零化侧偏角为控制目标,利用比例控制方法确定前后转角关系,对不同车速下四轮转向赛车和仅前轮转向赛车的角阶跃响应情况进行对比仿真研究.优化及仿真结果表明,本后轮转向梯形达到预期目标,对四轮转向赛车设计具有实际指导意义.【期刊名称】《自动化与仪表》【年(卷),期】2017(032)012【总页数】7页(P48-54)【关键词】大学生方程式赛车;后轮转向梯形;摇块式转向器;阿克曼转角;比例控制法;Matlab/Simulink【作者】张祥勃;何耀华【作者单位】武汉理工大学汽车工程学院,武汉430070;现代汽车零部件技术湖北省重点实验室,武汉430070【正文语种】中文【中图分类】U463.45大学生方程式汽车大赛(FSAE)由各国的汽车工程师协会举办,参赛成员为本科生和研究生,其中中国大学生电动方程式可以允许博士生参加,但不得超过3人。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
使用GA-PID 方法电动助力转向系统(EPAS )的优化设计M.K Hassan a *1, N.A.M. Azu bir b, Nizam .H.M.I c, S.F Tohad,2, B.S.K.K Ibrahime,3摘要在现代汽车中,电动助力转向系统(EPAS )正逐步取代传统的转向系统。
EPAS 系统的主要优点是可以减少能源消耗。
本文讨论了使用GA-PID 算法与传统的PID 方法相比来实现节能减排的潜力。
将电刷直流电动机安装在转向柱上,向驾驶员提供辅助转矩,这种配置被称为C-型EPAS 系统。
结果表明与PID 控制器相比,GA-PID 控制器能够最大限度地减少能源消耗。
关键词:电子助力转向系统(EPAS ),C-型EPAS ,GA-PID ,电动汽车。
命名法J m B m K bKaK m L R J s K s B s M r G Rs Tc Td Tas θ m θ电机转动惯量 电机阻尼 电机电动势常数电机扭矩电机刚性 电机电感电机电阻 方向盘的转动惯量 转向刚性 机架阻尼架和车轮总成质量 电机的齿轮比齿轮半径 传感器测量扭矩驱动力矩 辅助转矩方向盘角度 电机的旋转角度1. 前言电池容量的限制一直是电动汽车(EV )的一个主要问题。
因此,一些研究人员已经作出了努力,强调能源效率在每个电动汽车系统中的重要性。
电动汽车将不再使用机械转向系统与液压助力转向系统(HPAS )。
这是由于必需连续地从电池输出电能,以使得液压泵保持压力。
并且它的液压系统也需要定期的维护。
与之相比,电动助力转向系统仅在转动方向盘时消耗的电能。
电动助力转向系统也没有液体介质,机械部件少,更少的容错,最重要的是更加环保[1-3]。
一个典型的的EPAS 系统需要以转向扭矩车速和道路状况作为输入参数,通过辅助电机提供实时协助扭矩 [4]。
它可以在各种工作条件下提供最佳的转向感觉。
有三种类型的EPAS 系统已被广泛使用:转向柱式(C-EPAS ),小齿轮式(P-EPAS )和齿条式(R-EPAS )。
它基本上是表示辅助马达的安装位置。
C-EPAS 通常是配备在负载为6kNm 的紧凑型轿车上。
这三种类型的EPAS 系统的负载要求列于表1中。
表 1: EPAS 的载荷要求EPAS 类型 汽车尺寸 负载C-型 小 6 kN P-型 中 8 kN R-型大12 kNEPAS 系统的主要组成部分是电动马达。
所选电动马达应具有提供扭矩平滑并且波动小,高效率,低惯量,容错能力和最小的封装尺寸和重量[5]。
EPAS 的马达可以使用各种类型的电机例如直流电动机、无刷直流电动机和永磁同步电机[6]2. 转向柱式电动助力转向系统(C-EPAS )的原理Fig1为典型的C-EPAS 结构的示意图。
该系统由转向转矩传感器,车速传感器,ECU ,电机和辅助机构如齿轮箱和齿轮齿条组成。
当系统启动时,驱动转矩信号和车辆速度信号被发送到ECU 。
根据辅助增压曲线这两个信号将被用来计算出最佳的辅助转矩。
升压曲线通常表示为一张图表,因为它是非线性的并且受到多种因素影响。
实时的车速和方向盘扭矩之间的关系为),(speed c a V T B i 。
控制器的主要作用是产生一个精确的电流监测电机。
电动助力转向系统可分为四个子系统是:(1)转向柱和驱动转矩(2)辅助电动机(3)道路条件和(4):齿条和小齿轮。
每一个子系统都由方程(1)〜(9)中一个式子表示。
按照图2所示的模型使用MA TLAB / Simulink 进行仿真。
Fig2的C-EPAS 的数学模型根据牛顿运动定律运行。
转向柱,驱动扭矩:s J s ∙∙θ+s B s ∙θ+c T =d T (1)d T =(s θ∆-s θ)(p K +i K s1+d K s ) ( 2) c T =s K (s θ-srR x ) (3) 辅助电机型号:m J m ∙∙θ+m B m ∙θ=m T -a T (4)m T =a K a i (5)U=R a i +L a i +b K m ∙θ (6)a T =G m K (m θ-GsrR x ) (7) I=a i +w K w θ (8)),(speed c a V T B i =;B=提高曲线(查表) 道路条件和摩擦:t F =w J r x ∙∙+w B r x ∙+w K r x +C w F sign(r x ∙) (9)齿条和小齿轮的位移:r M r x ∙∙+r B r x ∙-s c R T =saR T -TR F (10) 在这个模拟中所使用的所有参数,均参照引用[4]。
在本文中, BCGA-PID 作为闭环结构实施。
比较增压曲线所要求电机的输入电流与电机的实际的输入电流。
3. 遗传算法遗传算法[6]是基于自然选择和遗传学的一种通用的优化算法,它被用来解决人口问题。
一个来自问题的目标函数的适应值,被分配到人口的每个成员。
个人认为代表着更好的解决方案,获得更高的适应能力,从而使他们能够存活更多的后代。
从初始随机人口开始连续几代的人口的遗传繁殖,交叉和变异产生更好的解决方案。
GA 重复上述步骤,直到符合预定标准。
在遗传算法中,所有的变量都必须被编码为二进制数字(基因)和二进制数字的集合形成一个字符串(染色体),这被称为二进制编码GA (BCGA )的表示。
经过操纵BCGA ,最终的二进制数字解码为原始的实数。
遗传算法维护一组称为人口的染色体来探讨搜索空间和解决问题。
在每一代,对每一个染色体的适应性进行评估,以衡量它与预定义的目标函数所得解决方案的近似程度。
在BCGA 中遗传性状经过交叉和变异,产生一些新的性状的种群。
重复该过程,直到找到了解决办法或达到最大迭代次数。
,可以在GA 的机制中发现更多细节[6]。
影响遗传算法的性能有四个重要参数:(一)人口规模,(二)的世代数,(三)交叉率,及(iv )突变率。
较大的人口规模(即数百个染色体)和一个大型的世代数(千股)提高获得全局最优解的可能性,但大幅增加处理时间[7]。
在BCGA 中交叉用于生产新的染色体。
两条染色体交换他们的遗传信息,产生新的染色体。
交换点是随机的。
最简单的交叉形式是单点交叉。
在BCGA 中变异算子的突概率是随机的,m P 保证了任何给定的字符串搜索的概率永远不会是零。
它也作为一个安全网,通过选择和交叉恢复可能会丢失的良好的遗传物质。
二进制突变翻转选取的突变位点的位点处的位的值。
因为突变一般是均匀地施加到整个人口的字符串,所以在一个给定的二进制字符串中一个以上的点突变是可能的。
4. PID 控制器PID 控制器是一个通用的控制机制,广泛应用于工业控制系统。
由于其成本低,维护费用低廉,以及控制器的设计和运行更简单,常规PID 控制已被广泛地用于例如化学和造纸工业中,其中约97%的控制器具有PID 结构[8]。
[9]该控制器的广泛使用导致了寻找PID 控制器的参数最佳值的研究试验,如经典的基于试验和错误和极点配置PID 控制器的参数整定规则。
可惜的是PID 控制器的增益已经难以准确地调整,因为许多工厂的问题往往很复杂,如更高的顺序,时间延迟和非线性[18]。
整定PID 控制器的经典技术有以下缺点:(一)过多的规则设定的收益,(二)缺乏动态的闭环响应,(三)难以处理非线性过程,及(四)数学控制设计的复杂性[12]。
为了克服这些困难,各类常规PID 控制器如自整定智能PID 控制器最近被开发用以改善传统方法整定的PID 控制器参数[13,14,15]。
因此,BCGA 的优化方法,可以在一个闭环的环境,调整参数并且降低振荡,如在fig3所示。
所需的设定点和实际输出之间的差作为误差:其中,y (t )是EPAS 的实际电流的y (t )是预测的EPAS 的电流。
均方误差(MSE )的定义用来形成优化过程的目标函数。
换句话说,参数应使估计的MSE 收敛到零。
式中,N= 1000表示的数据点的数量。
有一些标准的目标函数常被用以评估过程的作用。
在这些标准的目标函数中,MSE 的目标函数是最重要的,被定义为式(14)[16]。
该目标函数最初走红的估计问题,考虑未知参数的无偏估计量[17]的。
所考虑的目标函数的平方的函数,这是评价为超过所述数据集的均值,并最小化,以优化所考虑的造型设计。
因此,MSE 作为目标函数。
他们使用MSE 作为目标函数的研究的作品中使用计算智能优化的有[18,19]。
5. 结果与讨论主要的重点是两个不同的PID 和GA-PID 控制算法减少的能源消耗。
在fig4所示的控制方案的辅助马达的结构。
机架的运动是一个概括的驱动扭矩,辅助电机减去道路和摩擦模型。
被建模为在方程(9)中的道路和摩擦。
初步测试,以证明所有参数PID控制器和纠正在fig5所示的功耗EPAS系统的潜力。
PID 控制器只提供了良好的控制信号,并能够相应地控制电流。
仿真完成45公里每小时的车辆速度和一个分布式的随机数,表示驱动器的扭矩。
PID控制器是能够控制所需的辅助电机电流。
然而,PID参数的定义,使用试验和错误的方法,这是一个非常耗时的过程。
因此,通过引入BCGA优化的PID可使调谐过程便利。
BCGA所有的PID参数,而不是更快的调整。
BCGA这样在第3节中描述的算法可以制成:个人在人群中随机初始化的搜索空间。
评估目标函数的人口重复套用到个体的适应值使用随机普遍抽样进行竞争性选拔,套用遗传算子产生新的解决方案:交叉突变在种群中评估解决方案直到满足收敛准则BCGA上面描述的技术用于GA-PID控制器的调谐EPAS系统。
的特征参数,使用的BCGA 示于表2。
GA-PID的控制策略,如在图6中所示,已经证明,没有太大的不同控制器上的输出的比较为PID。
但近距离观察表明,它稍微产生了更好的控制性能。
GA-PID,PID参数列于表3。
表2: 用于BCGA参数化建模的特性参数特征项目迭代次数50个数50变量数 3 (Kp, Ki 和Kd)代差(新创造的个体数)0.8选择SUS重组概率0.8变异概率1/3 (变量数目)表3:PID和GA-PID参数GA-PID方法平均消耗的能耗降低13%,在fig7所示的PID。
仿真完成与40 km / h的车速和一个随机的驱动程序的转矩。
GA-PID也能保留突然下降了驾驶员的扭矩发生时的功耗。
这有助于使用PID控制器的平均功耗增加。
另一种测试是当车速增加,进行使用斜坡函数斜率1公里每小时,转矩是一种随机信号。
使用GA-PID的功耗平均降低75%,相比图8所示的PID。
当一个快速的驱动程序的施加转矩时,随车速增加的功率消耗增加显着与PID控制器。
然而,进一步的分析在停车场的车辆速度是零的情况下,驾驶的扭矩和快速变化来说明的功率消耗,例如,有许多工作要做。