电子动力转向系统的研究与设计
电动助力转向系统设计论述
提 供 辅 助 动 力 ,并 通 过 电 子 控 制 单 元 等 相 关 硬 件 电路 ,进 行 数 字 信 号 采 集 、脉 宽 调 制 输 出等 ,然 后 根 据 单 片机 相 关 指 令 对 电
动 机 进 行 实时 控 制 ,并 最 终 由机 械 传 动 装 置 实现 助 力 转 向 。 阐述 了电 动 助 力 转 向 系统 的 工 作 原 理 和 结 构 特 点 ,使 用 ARM7
已 经 充 分 体 现 了 它 的 优 势 ,这 是 模 拟 系 统 无 法 达 到 的 。 目 在 检 测 到 汽 车 点 火 信 号 有 效 后 ,当转 向轴 转 动 时 ,扭 矩 传 感
前 ,以 32位 处 理 器 作 为 高 性 能 嵌 入 式 系 统 开 发 的 核 心 是 嵌 器 将 检 测 到 的 转 矩 和 转 角 信 号 输 出 至 电 子 控 制 单 元 ECU,
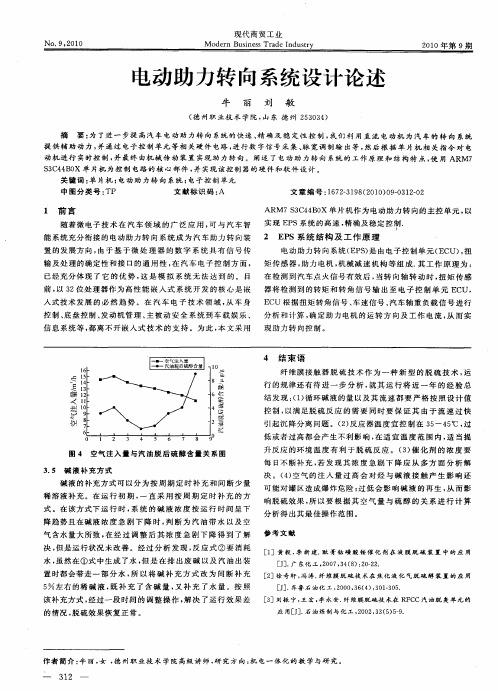
稀 溶 液 补 充 。在 运 行 初 期 ,一 直 采 用 按 周 期 定 时 补 充 的 方 式 。 在 该 方 式 下 运 行 时 ,系 统 的 碱 液 浓 度 按 运 行 时 间 呈 下 降 趋 势 且 在 碱 液 浓 度 急 剧 下 降 时 ,判 断 为 汽 油 带 水 以 及 空
升 反 应 的 环 境 温 度 有 利 于 脱 硫 反 应 。 (3)催 化 剂 的 浓 度 要 每 日不 断 补 充 ,若 发 现 其 浓 度 急 剧 下 降 应 从 多 方 面 分 析 解 决 。 (4)空 气 的 注 入 量 过 高 会 对 烃 与 碱 液 接 触 产 生 影 响 还 可 能 对 罐 区造 成 爆 炸 危 险 ;过 低 会 影 响 碱 液 的 再 生 ,从 而 影 响 脱 硫 效 果 ,所 以 要 根 据 其 空 气 量 与 硫 醇 的 关 系 进 行 计 算 分 析 得 出 其 最 佳 操 作 范 围 。
汽车电动助力转向机构的设计讲解

汽车电动助⼒转向机构的设计讲解汽车电动助⼒转向机构的设计引⾔在汽车的发展历程中,转向系统经历了四个发展阶段:从最初的机械式转向系统(Manual Steering,简称MS)发展为液压助⼒转向系统(Hydraulic Power Steering,简称HPS),然后⼜出现了电控液压助⼒转向系统(Electro Hydraulic Power Steering,简称EHPS)和电动助⼒转向系统(Electric Power Steering,简称EPS)。
装配机械式转向系统的汽车,在泊车和低速⾏驶时驾驶员操纵负担过于沉重,为了解决这个问题,美国GM公司在20世纪50年代率先在轿车上采⽤了液压助⼒转向系统[1]。
但是,液压助⼒转向系统⽆法兼顾车辆低速时的转向轻便性和⾼速时的转向稳定性,因此在1983年⽇本koyo公司推出了具备车速感应功能的电控液压助⼒转向系统。
这种新型的转向系统可以随着车速的升⾼提供逐渐减⼩的转向助⼒,但是结构复杂、造价较⾼,⽽且⽆法克服液压系统⾃⾝所具有的许多缺点,是⼀种介于液压助⼒转向和电动助⼒转向之间的过渡产品。
到了1988年,⽇本Suzuki公司⾸先在⼩型轿车Cervo上配备了Koyo公司研发的转向柱助⼒式电动助⼒转向系统;1990年,⽇本Honda 公司也在运动型轿车NSX上采⽤了⾃主研发的齿条助⼒式电动助⼒转向系统,从此揭开了电动助⼒转向在汽车上应⽤的历史。
第1章概述1.1电动助⼒转向的优点与传统的转向系统相⽐,电动助⼒转向系统最⼤的特点就是极⾼的可控制性,即通过适当的控制逻辑,调整电机的助⼒特性,以达到改善操纵稳定性和驾驶舒适性的⽬的。
作为今后汽车转向系统的发展⽅向,必将取代现有的机械转向系统、液压助⼒转向系统和电控制液压助⼒转向系统[2]。
相⽐传统液压动⼒转向系统,电动助⼒转向系统具有以下优点:(1)只在转向时电机才提供助⼒,可以显著降低燃油消耗传统的液压助⼒转向系统有发动机带动转向油泵,不管转向或者不转向都要消耗发动机部分动⼒。
电动转向系统开发与研究

二 、 S 系 统 原 理 简 京汽 车 集 团有 限 公 司技 术 中心 , 计 所 , 程 师 。 男 17 南 设 工 张 金 华 : , 9 8年 生 , 京汽 车 集 团有 限 公 司技 术 中心 , 计 所 , 理 工 程 师 。 男 17 南 设 助
电 子 电力 化 的助 力 系 统 创 造 r条 件 。 这 就是 电动 助
力 转 向 系 统 E S( lcr o rS e r g) 是 在 P E e ti P we tei c n ,
E S 系统 的 基 础 上 发 展 起 来 的 新 型 助 力 系统 。 CP E S在 性 能 环 保 等 很 多 发 面 比传 统 的 HP P S优 越 很 多 , 也 使 E S随 着 电 子 技 术 的 不 断 发 展 , 子 技 这 P 电 术 在 汽 车 上 的 应 用 也 越 来 越 广 泛 , 使 得 电动 转 向 这
电机 的 安 装 位 置 也 不 同 。 前 轴 负 倚 较 小 时 , 当 电机 及 减 速 装 置 与 转 向 轴 相 连 ( 之 为 转 向 助 力 式 ) 当 前 称 ;
轴 负荷 中 等 时 , 电机 及转 向 器 与 转 向 小 齿 轮 相连 ( 称 之 为小齿 轮助 力式 )当前轴 负荷 较大 时 , ; 电机 及 减 速 器 则 与 转 向 器 齿 条 轴 相 连 ( 之 为 齿 条 轴 助 力 称 式 ) 对 于 转 向辅 助 力 式 和 小 齿 辅 助 力 式 E S系 统 , 。 P 采 用 的 减 速 器 通 常 为 双 级 圆柱 齿 轮 式 , 轮 蜗 杆 式 蜗 或 双 排 行 星 齿 轮 式 ; 齿 条 轴 助 力 式 EP 而 S系统 通 常 采 用 的球 螺 旋 减速 机 构 。E S系统 的 方 向盘 转 矩 传 P
电动助力转向系统控制方案的设计与匹配研究

置
( 4 )
() 5 () 6 () 7
F - a  ̄ k, M -j fd / .F =
其中,y a 珥为前, , 后轮侧偏角; 口为质心侧偏角; 为汽车速 “
度 ; , 为前, 回正力矩 ; J为前, 轮侧偏 刚度 ; d为 后轮 J} I , } 后 , r
哆 c8 = , o 一 s 西
( 1 )
质心到前后轴的距离; 为横摆角速度。
到简化后的模型如图2 所示。以转向小齿轮为分析对象进行受 力分析, 得到如下动力学方程 :
, + ( ) 一 , = 一 一
() 8
其中。 为前轮及转向器齿轮转动惯量 ; 为电动机作用
角不超过 4~ 。 , 。5时 可认为侧偏力与侧偏角 成线性关 系。同时 ,
ቤተ መጻሕፍቲ ባይዱ
电动助力转 向系统是一个机械子 系统和电气子系统 相互 前面所建立的转向模型也要求轮胎侧偏特性处于线性范围内, 因此,所建轮胎模型认为轮胎的侧偏力与侧偏角成线性关系: 结合、 相互作用的系统, 同时也是汽车操纵的一个子系统, 要想
2 hc rs 妣 f S t 。0c o . e P
5
2
● ● ● ●。. ‘ ・ ・ ・ ‘ - _ ‘ ‘ o ● ●寺 ● ● o o o ● ● o o ● ● ・o ● ・o ・ ・0 -. ・0 ● o o o 6 o ● ● ● ●- ・ ● , ● ● o
S u yo o t l n thf ree ti p we s i e t eig t d f nr d mac o lcr o ra ss d se r c oa c t n
汽车电动助力转向控制系统的研究与开发

1绪论 1 E S 绍 1 P 介 E S由扭 矩 传感 器 、速度 传感 器 、转 向角传 感 器、 电子控 制装 置、 电 P 动 机 、离 合器 、减 速 器 和 齿 轮 齿 条 转 向机 构 等 组 成 。 其工作是 由检 测传感装 置将所需信 息输入控制 单元, 再由控 制单元对 这些 信 号进行运算 后得到…个 与行驶情 况相适 应的力矩, 最后 发 出指令 使 电动 机工 作 。 1 P 优点 2 E S ES P 具有 以下优点 : 1 节约 了能源 消耗 () () 2 对环 境无 污染 () 3 增强 了转 向 跟 随性 ( ) 4 改善 了回正特 性 ( ) 5 提高 了操纵 稳定性 ( ) 统结构 简单 。 6系 2 E S系统 总体 设计 P 2 1 P 的设计 总体框 架 E S 汽车在 启动或 发动机运 行 时, 如果 驾驶 员操纵汽 车方 向盘 , 此时在 方向盘 下侧的 扭矩传 感器会产 生 ~个与扭 矩成正 比的 电信号 。此时通 过主控 芯片 的 A 模块来 对其进 行采样 并且对 汽车 的发动 机的信 号 以及 车速 信号进行 采集测 D 量它们的频 率信 号( 设计 中不涉及 ) 同时对驱 动 电路 获取 电机的 电流信 号, 本 , 这 样可 以获得负载 的大 小。然后 通过预 设在 主控芯 片 内的控制 算法对 所获得 的汽 车 信 号进 行 处 理、计 算来 得 到需 给 出 目标的 电流 值 。然后 该值 通 过计 算 公式转 换成对应 的 P M 号 的占空 比值给驱 动芯 片传输 P M W信 W 信号 。 当驱 动 芯片 T3 0 D 4 收到 P M信号后, w 驱动 上 F 臂的两 对 一M S E 管 , 电机提 供 桥 OFT 给
m tr o o .U i g F e s a e s M 9 1 D 1 8 o t o c p a d d i e h p T 3 0 T t c i v ri e i c t F n l y c m l t a o e t e n s n r e e l ’ C S 2 G 2 c n r l hi n r v r c i D 4 S o a h e e d v c r ui . i a l , o p e e a c r p w r s e ri g
汽车电动助力转向系统研究现状及趋势

(5)提高了操纵稳定性。当驾驶员转动转向盘一角度,然后松开时,EPS系统能够自动调整使车轮回正。同时还可利用软件在最大限度内调整设计参数以获得最佳的回正特性。而在传统的液压控制系统中,要改善这种特性必须改造底盘的机械结构,实现起来很困难。
(6)系统结构简单,占用空间小,布置方便。由于该系统具有良好的模块化设计,所以不需要对不同的系统重新进行设计、试验、加工等,不仅节省了费用,也为设计不同的系统提供了极大的灵活性,而且更易于生产线装配。相对于液压助力转向系统,EPS没有油泵、油管和发动机上的皮带轮,使得设计该系统时有更大的余地,而且该系统的控制模块可以和齿轮齿条设计在一起或单独设计,发动机部件的空间利用率极高。
转向柱助力式电动助力转向器(C-EPS)的助力电机固定在转向柱的一侧,通过减速增扭机构与转向轴相连,直接驱动转向轴助力转向(图2)。这种形式的电动助力转向系统结构简单紧凑、易于安装。现在多数EPS就是采用这种形式。此外,C-EPS的助力提供装置可以设计成适用于各种转向柱,如固定式转向柱、斜度可调式转向柱以及其它形式的转向柱。但由于助力电机安装在驾驶舱内,受到空间布置和噪声的影响,电机的体积较小,输出扭矩不大,一般只用在小型及紧凑型车辆上。
由于技术、制造和维修成本等原因,目前汽车转向系统仍以液压助力的HPS(包括 ECHPS、EHPS)为主。线控转向系统由于成本高以及现有法规限制等原因,在近期很难在车辆上装配。EPS具有节能与环保等诸多优点,EPS取代HPS是今后一段时间内汽车转向系统发展的趋势。
从EPS控制策略的发展趋势来看,今后控制信号将不再仅仅依靠车速与扭矩信号,而是根据转向角、转向速度、横向加速度、前轴重力等多种信号进行与汽车特性相吻合的综合控制,以获得更好的转向路感。目前已经开始这方面的研究。
电动助力转向系统的研究及延伸.doc22222

目录前言 (3)第一章概述 (7)1.1 汽车转向系统 (7)1.2 汽车转向系统的发展历史 (7)1.3 电动助力转向系统优点 (8)1.4 电动助力转向系统无功损耗研究的重要性 (9)1.5电动助力转向系统及发展趋势 (9)第二章电动助力转向系统结构 (11)2.1 控制器 (12)2.2 传感器 (12)2.3 助力电机 (13)第三章电动助力转向系统的控制策略及验证 (15)3.1 电动助力转向系统的控制策略 (15)3.2电动助力转向系统的控制策略试验验证 (19)第四章以飞度车为例说明电动助力转向系统工作原理及故障诊断 (24)4.1 广州本田飞度轿的电动助力转向系统工作原理 (24)4.2 电动助力转向系统的诊断 (27)第五章电动助力转向系统无功耗的探讨 (28)5.1 电动助力转向系统的能耗现状 (28)5.2电动助力转向系统的能耗途径分析 (28)5.3无功损耗指标的研究 (32)5.4电动助力转向系统节能方法的探讨 (33)第六章电动助力转向系统得技术发展趋势 (35)6.1舒适性功能 (35)6.2 安全功能 (36)第七章未来的转向系统----线控转向系统 (39)7.1线控转向系统的结构和工作原理 (39)7.2.线控转向系统的优点 (40)7.3 汽车线控转向系统的关键技术 (41)7.4 线控转向系统可靠性问题 (41)7.5 汽车线控转向技术的前景展望 (42)第八章基于线控转向系统技术——对无线转向系设想 (44)8.1 技术基础 (44)8.2 现实模型 (44)第九章结束语 (47)参考文献 (48)附件部分第一部分EPS系统试验设备彩照 (49)第二部分外语翻译(欲称霸全球的小型汽车公司) (50)第三部分外语翻译原文 (55)前言汽车自19世纪末诞生至今100余年的时间,汽车工业从无到有,以惊人的速度发展,在人类近代文明史写下了的重要篇章。
汽车是数量最多、最普及、活动范围最广、运输量最大的现代化交通工具。
汽车电动助力转向系统的设计
毕业设计(论文)题目汽车电动助力转向系统的设计专业学号学生指导教师答辩日期 20**年12月28日毕业设计(论文)任务书说明:请同学们下载后,上述五页与论文使用同材质纸张打印,此页不必打印。
目录摘要 (I)Abstract (II)第1章绪论 (1)1.1 汽车转向系统简介 (1)1.1.1 转向系的设计要求 (1)1.2 EPS的特点及发展现状 (2)1.2.1 EPS与其他系统比较 (2)1.2.2 EPS的特点 (2)1.2.3 EPS在国内外的应用状况 (3)1.3 本课题的研究意义 (4)第2章电动助力转向系统的总体组成 (5)2.1 电动助力转向系统的机理及类型 (5)2.1.1 电动助力转向系统的机理 (5)2.1.2 电动助力转向系统的类型 (7)2.2 电动助力转向系统的关键部件 (9)2.2.1 扭矩传感器 (9)2.2.2 车速传感器 (9)2.2.3 电动机 (9)2.2.4 减速机构 (10)2.2.5 电子控制单元 (10)2.3 电动助力转向的助力特性 (11)第3章电动助力转向系统的设计 (12)3.1 对动力转向机构的要求 (12)3.2 齿轮齿条转向器的设计与计算 (12)3.2.1 转向系计算载荷的确定 (13)3.2.2 齿轮齿条式转向器的设计 (14)3.2.3 齿轮齿条转向器转向横拉杆的运动分析 (22)3.2.4 齿轮齿条传动受力分析 (24)3.2.5 齿轮轴的强度校核 (24)第4章转向传动机构的优化设计 (29)4.1 结构与布置 (29)4.2 用解析法求内、外轮转角关系 (30)4.3 转向传动机构的优化设计 (32)4.3.1 目标函数的建立 (32)4.3.2 设计变量与约束条件 (33)4.4 研究结论 (36)结论 (37)致谢 (39)参考文献 (40)附录1 (41)附录2 (46)摘要汽车转向系统可按转向的能源不同分为机械转向系统和动力转向系统两类。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
摘要电动助力转向系统(Electric Power Steering System,简称EPS),是汽车工程领域的热门课题之一。
本文在研究了电动助力转向系统工作原理的基础上,设计开发了EPS的电子控制单元ECU (Electronic Control Unit)的硬件电路和相应的控制软件框图。
本文详细分析了电动助力转向系统电子控制单元的功能,研究开发了以89c51单片机为微处理器的电子控制单元。
控制单元具有实时数据信号采集和系统控制功能,根据采集的数据信号,确定电动机输出的目标电流,利用PWM脉宽调制技术,通过H桥式电路控制电动机的输出电流和转动方向,实现助力转向功能。
在研制了实验用ECU装置后,开发了相应的控制软件。
控制软件分为控制策略的实现和数据信号采集与分析两部分。
整个软件系统采用了模块化的设计思想。
在数据信号采集与控制部分,设计了系统主程序、A/D采集程序、车速信号采集程序和PWM控制程序。
本文所设计的EPS电子控制单元性能稳定,结构合理,与整车匹配性能好,可保证EPS实现良好的转向助力效果。
关键词电动助力转向电子控制单元单片机控制策略AbstractElectric Power Steering System (EPS) is one of the focuses research in automotive engineering.This paper is based on the principles of EPS to study the operation, designed and developed the Electronic Control Unit (ECU) and the soft ware diagram of the ECU.The thesis Considers the functions of the electronic control unit of EPS, studied and developed the hardware that adopted 89c51as its microprocessor. The control unit was able to realize real-time data/signal acquisition and system control. The target current of motor output could be determined by the obtained data; and utilizing the Pulse-Width Modulation (PWM) technology, power could be provided to the steering system by controlling the output current and rotation direction through H-bridge circuit.The software program, which was divided into the realization of control strategy and the acquisition&control of data/signal, was developed in modular after thedesign of experimental ECU was completed. And the main program, A/D acquisition program, speed signal acquisition program and PWM control program are developed in the second part.The result showed that the electronic control unitdesigned was with stable performance, appropriate structure and excellent matchingcondition, and the excellent power steering effect could be ensured by EPS.Key words: Electric Power Steering System (EPS) Electronic Control Unit Single-Chip Microprocessor Control Strategy目录1 引言 (1)1.1汽车电动助力转向系统的特点 (1)1.2电动助力转向系统国内外的研究现状 (2)1.3EPS的发展趋势和急待解决的核心技术 (2)1.4本课题研究的目的与意义 (3)2 电动助力转向系统方案确定及其工作原理 (4)2.1电动助力转向系统的工作原理 (5)2.2电动助力转向系统的数学模型 (7)2.3电动助力转向系统的主要部分 (11)3 电动助力转向系统的硬件设计 (16)3.1电子动力转向系统控制器的总体结构 (16)3.2控制器微处理芯片的选择 (17)3.3控制器输入通道的设计 (20)3.4控制器输出通道的设计 (23)3.5系统供电电源电路设计 (28)3.6系统硬件抗干扰措施 (28)4 电子动力转向系统的软件设计 (30)4.1EPS.的控制策略 (30)4.2电子动力转向系统各功能模块的软件设计 (32)5 总结 (38)参考文献 (39)致谢 (40)附录 (41)1 引言1.1 汽车电动助力转向系统的特点由于动力转向系统具有转向操纵灵活、轻便、并可吸收路面对前轮产生的冲击等优点,自20世纪50年代以来在各国汽车上开始普遍应用。
现今液压助力转向器(HPS)是以内燃机作为动力的汽车助力转向器的主流。
但是传统的HPS需要持续的能量消耗,降低了汽车的燃油经济性。
同时其复杂的液压系统具有助力特性不可调整、污染环境、维修不便等缺点。
20世纪80年代开始研究的汽车上电能为动力的电动助力转向系统(EPS)。
和HPS相比,它具有更为突出的优点:1.EPS能在各种行驶工况下提供最佳助力,减少由路面不平所引起的对转向系统的扰动,改善汽车的转向特性,减少汽车低速行驶时的转向操纵力,提高汽车高速行驶时的转向稳定性,进而提高汽车的主动安全性。
并且可通过设置不同的转向手力特性来满足不同对象使用的需要。
2.提高了汽车的燃油经济性。
液压动力转向系统需要发动机带动液压油泵,使液压油不停地流动,浪费了部分能量。
相反电动转向系的EPS需要转向操作时才需要电机提供的能量,是真正的―按需供能型‖(on demand)系统。
装有电动转向系统的车辆和装有液压助力转向系统的车辆对比实验表明,在不转向情况下、装有电动转向系统的车辆燃油消耗降低2.5%;在使用转向情况下,燃油消耗降低了5.5% 。
]1[3.增强了转向跟随性。
在EPS中,电动机与助力机构直接相连以使其能量直接用于车轮的转向。
这样增加了系统的转动惯量,电机部分的阻尼也使得车轮的反转和转向前轮摆振大大减小。
因此转向系统的抗扰动能力大大增强。
和HPS相比,旋转力矩产生于电机,没有液压助力系统的转向迟滞效应,增强了转向车轮对转向盘的跟随性能。
4.该系统由电动机直接提供转向助力,在停车时,也可获得最大的转向动力。
同时省去了液压动力转向系统所必需的动力转向油泵、软管、液压油、密封件、传送带和装于发动机上的皮带轮等,其零件比HPS大大减少,因而其质量更轻、结构更紧凑,在安装位置的选择方面也更容易,装配自动化程度更高,维修更简单。
5.EPS没有液压回路,不存在渗油的问题,减少了对环境的污染。
同时由于液压油在低温时的粘度很大,存在低温时必须有个加温的过程,而EPS可以在零下40℃很好的工作,基本上不存在受温度影响的问题。
6.在未来10-15年推出的纯电动汽车或者燃料电池汽车等汽车上由于没有的传统意义上的内燃机,因此必须考虑安装EPS。
7.电动转向还可有各种安全保护措施和故障自诊断功能。
使用可靠,维修方便。
由此可见,EPS和HPS相比,是一项紧扣现代汽车时代发展主题的高新技术,必将逐步取代现有的机械转向系统、液压助力转向系统和电控液压助力转向系统。
1.2 电动助力转向系统国内外的研究现状国外从1979年就开始研究电动式电子控制动力转向系统,1988年日本铃木公司首先在其CER车上装备了电动式EPS。
同年,美国通用公司也在某些型号的汽车上装备了电动式EPS。
1993年,本田汽车公司首次将电动助力转向系统装备于大批量生产的、在国际市场上同法拉利和波尔舍竞争的爱克NSX跑车上;同年,在欧洲市场销售的一种经济型轿车-菲亚特帮托也将美国德尔福公司生产的电控助力转向系统作为标准装备。
随后,国外很多公司和机构介入了电动式EPS的研究和开发工作。
美国的TRW公司,日本的三菱公司、KOYO公司,德国的ZF公司都相继研制出了电动式EPS。
经过二十几年的发展,EPS技术已日趋完善,其应用范围正从最初的微型轿车向普通轿车和商用客车方向发展。
EPS产品在2002年才有国内企业进行研制开发,目前已经知道的有10多家科研院校正在研制中,如清华大学、吉林大学、江苏大学、天津大学、合肥工业大学等,另外还有10多家转向企业和10多家配套企业也在研制中。
从市场应用来看,国内已装有EPS产品的汽车主要为1.3L-1.6L的轿车(主要是电动机的功率所致)。
如重庆长安的奥拓、安徽的奇瑞、南京菲亚特、广州本田飞度、昌河北斗星等。
但是,由于国产汽车各车型技术的实际情况以及使用条件的特殊性,国外的EPS与国产汽车的匹配以及实用性还存在问题,至今还没有与国产汽车相协调匹配的、且具有自主知识产权的EPS,仅仅在近几年才开展EPS的技术研究,可获得的技术资料较少,目前尚处于技术攻关阶段。
1.3 EPS的发展趋势和急待解决的核心技术首先,EPS的应用范围将会进一步拓宽,将作为标准件装备在汽车上,并将在动力转向领域占据主导地位。
目前,在全世界汽车行业中,电动转向系统每年正以9%-10%的增长速度发展,年增长量达130万至150万套,估计至2005年,该产品的产量将由目前的150万套增长到800万套,2007年将达到1140万套。
按此速度发展,用不了几年的时间,电动转向将会完全占领轿车市场,并向微型车、轻型车和中型车扩展。
尽管EPS已达到了其最初的设计目的,但仍然存在一些问题急待解决,比如提高现有应用的EPS系统性能的可靠性、降低生产成本等。
其中,进一步改善电动机的性能是下一步努力的一个主要方向。
电动机本身的性能及其与电动助力转向系统的匹配都将影响到转向操纵力、转向、路感等问题。