粗茎秆作物切割器设计与仿真分析
玉米秸秆切碎还田机参数仿真优化与试验

第52卷㊀第2期2024年2月㊀㊀林业机械与木工设备FORESTRYMACHINERY&WOODWORKINGEQUIPMENTVol52No.2Feb.2024研究与设计玉米秸秆切碎还田机参数仿真优化与试验宋金库ꎬ㊀李㊀辉∗ꎬ㊀张㊀华ꎬ㊀刘小龙ꎬ㊀孙㊀伟ꎬ㊀陈扬洲ꎬ㊀王㊀帅ꎬ㊀袁永威(甘肃农业大学大学机电工程学院ꎬ甘肃兰州730070)摘㊀要:针对现有的玉米秸秆切碎还田机秸秆粉碎长度过长ꎬ在后续免耕播种中导致播种开沟器易堵塞的问题ꎮ采用正交试验设计方法ꎬ结合多体动力学软件RecurDyn和田间试验ꎬ以秸秆粉碎长度为试验指标ꎬ机具的行驶速度㊁偏心圆盘的转速㊁切碎刀杆的长度为试验因素ꎬ选用L27(313)正交表ꎬ通过虚拟仿真试验方法ꎬ仿真得出每种方案的试验结果ꎮ对试验结果通过极差分析和方差分析ꎬ得出秸秆切碎还田机最优参数组合:圆盘转速700r/min㊁机具行驶速度3km/h㊁刀杆长度为200mmꎮ田间重复试验表明ꎬ最优参数组合条件下秸秆粉碎长度达到49.2mmꎬ比虚拟仿真试验得出的秸秆粉碎长度(47.7mm)长1.5mmꎬ田间试验结果与仿真试验结果吻合度高ꎬ可以为同类型的玉米秸秆切碎还田机的设计提供参考ꎮ关键词:秸秆还田机ꎻ切碎长度ꎻRecurDyn仿真ꎻ正交试验ꎻ轨迹中图分类号:S224.3㊀㊀文献标识码:A㊀㊀文章编号:2095-2953(2024)02-0037-06SimulationoptimizationandexperimentofparametersformaizestrawchoppingandreturningmachineSONGJin ̄kuꎬLIHui∗ꎬZHANGHuaꎬLIUXiao ̄longꎬSUNWeiꎬCHENYang ̄zhouꎬWANGShuaiꎬYUANYong ̄wei(SchoolofMechanicalandElectricalEngineeringꎬGansuAgriculturalUniversityꎬLanzhouGansu730070ꎬChina)Abstract:Inresponsetotheproblemofexcessivestrawcrushinglengthinexistingmaizestrawchoppingandretur ̄ningmachinesꎬandtheproblemofcloggingofthefurrowopenerinsubsequentno-tillageseedingoperation.UsingtheorthogonalexperimentaldesignmethodꎬcombinedwithmultibodydynamicssoftwareRecurDynandfieldexperi ̄mentsꎬthestrawcrushinglengthwasusedastheindicatorsꎬandthemovingspeedoftheimplementꎬrotationspeedoftheeccentricwheelꎬandthelengthofthecuttingrodwereusedastheexperimentalindicators.TheL27(313)or ̄thogonaltablewasusedtosimulatetheexperimentalresultsofeachschemethroughvirtualsimulationtestingmethod.Throughrangeanalysisandvarianceanalysisoftheexperimentalresultsꎬtheoptimalparametercombinationwasde ̄terminedtobearotationspeedoftheeccentricwheelof700r min-1ꎬaimplementmovementspeedof3km h-1ꎬandacutterrodlengthof200mm.Fieldrepeatedexperimentsshowedthatundertheoptimalparametercombinationconditionsꎬthestrawcrushinglengthreached49.2mmꎬwhichis1.5mmlongerthanthestrawcrushinglengthof47.7mmobtainedfromvirtualsimulationexperiments.Theresultsoffieldexperimentsandsimulationexperimentsarehighlyconsistentꎬandthisresearchachievementcanprovidereferenceforthedesignofsimilartypesofmaizestrawchoppingandreturningmachines.Keywords:strawreturningmachineꎻchoppinglengthꎻRecurDynsimulationꎻorthogonaltestꎻtrajectory㊀㊀收稿日期:2023-11-22第一作者简介:宋金库ꎬ硕士研究生ꎬ研究方向为机械化保护性耕作技术及机具ꎬE-mail:1920099587@qq.comꎮ∗通讯作者:李辉ꎬ副教授ꎬ博士ꎬ主要从事马铃薯栽培技术及收获机具研究ꎬE-mail:112551866@qq.comꎮ林业机械与木工设备第52卷玉米秸秆年产量高ꎬ仅次于我国水稻秸秆的产量[1-2]ꎬ玉米秸秆是农业收获过程中产生的副产品ꎬ是农业生产活动中的宝贵资源[3]ꎬ玉米秸秆还田后可代替地膜保持土壤水分和养分[4-5]ꎬ改善土壤微生物群落功能ꎬ促进西北半干旱区马铃薯㊁冬小麦的生长以及水稻产量㊁品质的提高[6-9]ꎬ促进农业可持续发展ꎮ国内相关学者对秸秆还田机做了大量研究ꎬ现有秸秆还田机研究主要集中在切刀的结构㊁关键切割装置的结构㊁秸秆切割原理等方面[10]ꎬ如ZhaoJ等[11]以具有高效切割能力的东北蝗虫为研究对象对切刀结构进行创新设计ꎬ与传统的秸秆还田机相比可以降低切割功耗与提高玉米秸秆粉碎长度合格率ꎮ张茜等[12]采用离散元方法研究了切刀的结构参数对番茄秸秆切削效率㊁切割性能等的影响ꎮ研究表明等滑切角锯齿型刀片在切割过程中切割能耗最低ꎬ切割效率最高ꎮ郑智旗等[13]基于有支撑切割和滑切原理ꎬ利用滑切角式粉碎定刀和高速旋转的粉碎动刀设计了一种动定刀支撑滑切式秸秆粉碎装置ꎬ可降低功耗并提高秸秆粉碎长度合格率ꎮ刘伟光等[14]将粉碎锤爪㊁Y形粉碎刀结合起来ꎬ通过双排定刀与秸秆粉碎刀辊的配合改变支撑切割面积ꎬ进而设计了一种秸秆精细粉碎双排定刀还田机ꎮ王庆杰等[15]针对甩刀式和垂爪式秸秆还田机粉碎长度随机性较大的问题ꎬ基于四杆机构原理对关键切杆装置进行设计ꎬ设计的机具与甩刀式秸秆还田机相比ꎬ秸秆粉碎长度不合格率降低了5%ꎬ为北方一年两熟区玉米秸秆还田提供了一种新型装备ꎮ利用多体动力学进行机构运动轨迹分析已经很成熟ꎬ如王红松等[16]对捡拾装置的甩刀进行分析ꎬ甩刀的绝对运动是刀辊旋转和机具前进两种运动的合成ꎬ利用ADAMS分析了甩刀轨迹ꎬ确定了刀辊的最佳捡拾转速ꎮ国内相关学者也对刀辊旋转和机具前进运动合成的绝对运动进行了仿真分析ꎮ在西北半干旱地区免耕播种过程中ꎬ研究发现播种开沟器易堵塞ꎬ其原因是秸秆粉碎长度过长ꎮ所以采用正交试验设计方法ꎬ结合多体动力学软件RecurDyn和田间试验对玉米秸秆切碎还田机进行改进ꎬ以期为同类型的玉米秸秆切碎还田机的设计提供参考ꎮ1㊀总体结构与工作原理1.1㊀整机结构及工作原理玉米秸秆切碎还田机结构如图1所示ꎬ主要由压辊㊁动力传动系统㊁偏心圆盘㊁切杆㊁切刀㊁摇杆和机架组成ꎬ与拖拉机之间采用三点悬挂连接ꎮ拖拉机后置输出轴将动力经万向节㊁变速器传给切杆装置ꎮ机具作业时ꎬ压辊位于机具的最前端ꎬ将直立的玉米秸秆按机具的前进方向压倒㊁铺放ꎬ此时地面作为秸秆的支撑面ꎬ连杆(由切刀与切杆构成)在偏心圆盘的带动下做往复运动ꎬ将地面上以及埋在土壤中的玉米秸秆切碎成段ꎬ减少后续作业过程中产生的机具堵塞现象ꎮ图1㊀玉米秸秆切碎还田机结构示意图1.动力传动系统ꎻ2.偏心圆盘ꎻ3.切杆ꎻ4.压辊ꎻ5.切刀ꎻ6.摇杆ꎻ7.机架1.2㊀机具技术参数机具的技术参数如表1所示ꎮ表1㊀机具主要技术参数名称数值整机尺寸/mm1370ˑ710ˑ680整机质量/kg610配套动力/kW33工作幅宽/mm1700纯生产率/hm2 (m h)-10.42㊀关键零部件构成及仿真2.1㊀切碎刀杆装置构成切碎刀杆装置如图2所示ꎬ为曲柄摇杆机构包括偏心圆盘㊁切杆㊁切刀㊁摇杆和机架ꎬ为保证机具运行中的平衡ꎬ两偏心圆盘成180ʎ角安装ꎮ83第2期宋金库ꎬ等:玉米秸秆切碎还田机参数仿真优化与试验图2㊀切碎刀杆装置三维结构1.偏心圆盘ꎻ2.切杆ꎻ3.摇杆ꎻ4.机架2.2㊀多体动力学仿真模型的建立如图3所示ꎬ将SolidWorks中的模型另存为Pa ̄rasolid(∗.x_t)格式ꎬ将其导入到RecurDyn中ꎬ在RecurDyn中添加相应的移动副㊁旋转副和直线运动㊁圆周运动ꎮ通过整机与地面之间的移动副运动表达式控制机器的前进速度ꎬ通过圆盘与机架的旋转副运动表达式控制圆盘的角速度[17-18]ꎮ图3㊀RecurDyn仿真结果2.3㊀运动轨迹生成及分析仿真模型建立后ꎬ利用RecurDyn中对切刀端点路径的追踪(Trace)得到其轨迹ꎮ以圆盘转速700r/min㊁机具行驶速度3km/h㊁刀杆长度200mm为例得到机具运行的轨迹数据ꎬ如表2所示ꎮ如图4所示ꎬZ为切刀端点向前行进的坐标ꎬY为切刀上下行程的坐标ꎮ通过输出的坐标发现(YꎬZ)点呈周期性变化ꎬ切刀端点坐标(Marker)是相对于原点的ꎬ当Y为78.4mm(T=0.32s)㊁79.6mm(T=0.49s)时ꎬ切刀端点正好与地面接触ꎬ在一个周期内切刀切断秸秆3次ꎬ机具前进了(Z2-Z1)mmꎬ由上可得秸秆粉碎长度ꎮәZ=Z2-Z1n=492.9-349.83=47.7mm(1)表2㊀某个周期内的(YꎬZ)坐标时刻T/sZ向坐标/mmY向坐标/mm0.32349.8414578.3662840.33337.1271438.5243620.34312.0181921.496450.35302.9615767.6786130.36302.94361101.011430.37311.1328156.342430.38356.12429178.316960.39376.60605174.171450.40423.05271110.269090.41417.366561.2697060.42389.6876818.6480410.43380.494426.344470.44374.86988112.374440.45385.43407162.202030.46397.49192174.024020.47421.68113178.664430.48475.70892157.922890.49492.8578479.558541图4㊀切刀端点轨迹图3㊀试验设计为了进一步优化和考察机具关键参数的合理性ꎬ拟通过多体动力学仿真优化试验和田间验证试验优化机具参数ꎬ具体试验设计如下ꎮ3.1㊀试验因素㊁水平及指标选用圆盘的转速㊁刀杆的长度以及拖拉机的行驶速度作为试验因素ꎬ取机具正常作业速度3~5km/hꎬ其他试验因素及水平如表3所示ꎬ改变旋转副㊁移动93林业机械与木工设备第52卷副的运动关系式可以控制圆盘的转速㊁拖拉机的速度ꎬ至于刀杆的长度需要在SolidWorks中改变ꎬ将另存为Parasolid(∗.x_t)格式的模型再次导入到Re ̄curDyn中ꎬ再添加运动副以及运动ꎮ试验指标为秸秆粉碎长度әZꎬ在给定的范围内ꎬ粉碎长度越短ꎬ后续播种开沟器的堵塞问题就越少ꎮ以小麦的农艺要求为例ꎬ宽窄行种植中窄行为10~14cm[19-20]ꎬ秸秆粉碎后的长度不超过窄行行距的一半ꎬ所以将玉米秸秆粉碎后长度定为50mm最适宜ꎮ在设计该正交实验表时需考虑交互作用ꎬ某因素或某交互作用的影响是否真的存在ꎬ可以到方差分析进行显著性检验时再做结论[21]ꎮ表3㊀试验因素及水平水平因素Aꎻ圆盘转速/r min-1Bꎻ拖拉机行驶速度/km h-1Cꎻ切杆长度/mm170052702600320038004140㊀㊀选用L27(313)的正交表来进行虚拟仿真试验ꎬ试验结果如表4所示ꎮ表4㊀试验结果试验号因素试验结果1A2B3(AˑB)14(AˑB)25C6(AˑC)17(AˑC)28(BˑC)111(BˑC)2秸秆粉碎长度/mm111111111189.3211112222279.4311113333386.5412221112353.6512222223147.7612223331255.8713331113268.5813332221363.5913333332182.210212312311140.51121232312293.31221233123394.61322311232362.41422312313155.41522313121255.61623121233283.317231223113701823123122158.61931321321193.7203132213221102131323213386.82232131322355.52332132133149.9243213321125225332113232742633212131366.62733213212169.4K1-69.6197.1269.3970.9680.0971.8670.9276.3376.30K2-79.3054.2177.2873.2870.6476.1169.1873.8274.66K3-73.1070.6875.3477.7871.2874.0481.9171.8671.06R9.6942.917.896.829.454.2612.734.485.2404第2期宋金库ꎬ等:玉米秸秆切碎还田机参数仿真优化与试验3.2㊀试验数据分析根据极差分析和均值分析ꎬ在给定的范围内ꎬ由于秸秆粉碎长度越短越好ꎬ影响秸秆粉碎长度的优水平和因素主次顺序依次为B2㊁[(AˑC)2]2㊁A1㊁C2㊁[(AˑB)1]1㊁[(AˑB)2]1㊁[(BˑC)2]3㊁[(BˑC)1]3㊁[(AˑC)1]1ꎮ为了核实直观分析法的准确性ꎬ接下来对试验结果进行方差分析ꎮ从表5的结果可以得出因素B和交互作用(AˑC)2对试验指标的影响显著ꎮ为了确定因素A与C的优水平ꎬ做A与C的交互作用表如表6所示ꎬ因为在给定的范围内试验指标越小越好ꎬA1C2即为试验结果的最优值ꎮ综上所述ꎬ最优仿真试验选取A1B2C2ꎬ与第5号仿真试验中得到的最小秸秆粉碎长度(47.7mm)对应的因素组合一致ꎬ即圆盘转速700r/min㊁刀杆长度200mm㊁拖拉机行进速度3km/hꎮ表5㊀试验数据的方差分析表方差来源偏差平方和自由度F比F临界值显著性A433.4622.404.46B8435.47246.604.46∗(AˑB)1304.3221.684.46(AˑB)2216.5621.204.46C501.7022.774.46(AˑC)181.5220.454.46(AˑC)2857.8124.744.46∗(BˑC)190.6720.504.46(BˑC)2129.5120.724.46误差724.058表6㊀A和B对碎秸长度的交互效应因素C因素A水平1水平2水平3水平170.4795.4074.40水平263.5372.9075.50水平374.8369.6069.404㊀田间试验与分析为测定所优化机具的田间作业性能ꎬ2023年5月在甘肃农业大学通渭县旱作循环农业试验基地进行田间试验ꎬ该地区作物一年一熟ꎬ为典型的半干旱雨养农业区ꎬ试验地土壤类型为黄绵土ꎬ0~20cm深度内土壤含水率为13.8%ꎮ玉米品种为先玉335ꎬ玉米秸秆由基部向上数第二节平均直径为26.2mm[22]ꎬ平均含水率为5.8%ꎬ风干玉米整秆覆盖量为9000kg/hm2[23]ꎮ为了验证该工作参数的科学性与合理性ꎬ选取与最优试验结果相近的试验号ꎬ以表4的试验数据结果为依据选择试验5㊁23㊁24各做3次重复试验ꎬ试验结果如表7所示ꎮ秸秆粉碎长度的测试参照国家标准GB/T24675.6-2021«保护性耕作机械秸秆粉碎还田机»中的方法与规范ꎮ每组验证试验做3次ꎬ每次随机选取一个点ꎬ每点测定1mˑ1m面积内的秸秆粉碎长度ꎮ捡拾9个点的秸秆ꎬ每个点随机挑出5个粉碎秸秆进行长度测量并取其平均值ꎬ每组测试有3个点ꎬ对3个点的秸秆粉碎长度再取平均值ꎬ测试过程如图5ꎮ由表7的试验可知ꎬ秸秆粉碎长度最短的参数组合:圆盘转速700r/min㊁机具行驶速度3km/h㊁刀杆长度为200mmꎬ与正交试验分析一致ꎮ以此组合进行试验ꎬ秸秆粉碎长度为49.2mmꎮ表7㊀验证试验数据表A圆盘转速/r min-1B拖拉机行驶速度/km h-1C切杆长度/mm秸秆粉碎长度/mm700320049.2800320051.5800314052.3图5㊀田间试验5㊀结论利用RecurDyn仿真得出切碎刀杆装置的轨迹图ꎬ通过轨迹图可以计算出秸秆粉碎长度ꎮ然后以14林业机械与木工设备第52卷秸秆粉碎长度为试验指标ꎬ机具的行驶速度㊁偏心圆盘的转速㊁切碎刀杆的长度为试验因素设计正交试验得出每种参数组合的秸秆粉碎长度ꎮ因为在一定的范围内秸秆粉碎长度越短越好ꎬ根据对试验结果的分析得出影响秸秆粉碎长度的优水平和因素主次顺序依次为B2㊁[(AˑC)2]2㊁A1㊁C2㊁[(AˑB)1]1㊁[(AˑB)2]1㊁[(BˑC)2]3㊁[(BˑC)1]3㊁[(AˑC)1]1ꎬ方差分析得出因素B和交互作用(AˑC)2对试验指标的影响显著ꎬA与C的交互作用表得出A1C2即为试验结果的最优值ꎮ所以秸秆切碎还田机最优参数组合:圆盘转速700r/min㊁机具行驶速度3km/h㊁刀杆长度为200mmꎬ此时的秸秆粉碎长度为47.7mmꎮ田间试验表明秸秆粉碎长度最短为49.2mmꎬ与虚拟仿真试验47.7mm吻合度高ꎬ此时机具作业参数仍为A1B2C2ꎮ该机具研究可以为同类型的秸秆还田机的设计提供参考ꎮ参考文献:[1]㊀毕于运ꎬ王亚静ꎬ高春雨.中国主要秸秆资源数量及区域分布[J].农机化研究ꎬ2010ꎬ32(3):1-7.[2]㊀胡志超.全秸硬茬地高质顺畅机播关键技术研究[M].北京:中国农业科学技术出版社ꎬ2019.[3]㊀谢光辉ꎬ王晓玉ꎬ任兰天.中国作物秸秆资源评估研究现状[J].生物工程学报ꎬ2010ꎬ26(7):855-863.[4]㊀RuiLꎬShouxiCꎬYuweiCꎬetal.Mulchingoptimizeswaterconsump ̄tioncharacteristicsandimprovescropwaterproductivityonthesemi-aridLoessPlateauofChina[J].AgriculturalWaterManagementꎬ2021ꎬ254.[5]㊀YaweiLꎬShouxiCꎬYuweiCꎬetal.Effectsofmulchingonsoiltem ̄peratureandyieldofwinterwheatinthesemiaridrainfedarea[J].FieldCropsResearchꎬ2021ꎬ271.[6]㊀张乃文ꎬ韩晓增ꎬ朴勇杰ꎬ等.深翻和秸秆还田对土壤微生物群落功能多样性的影响[J].干旱地区农业研究ꎬ2022ꎬ40(3):178-185.[7]㊀李辉ꎬ常磊ꎬ韩凡香ꎬ等.旧膜及秸秆覆盖对西北旱地马铃薯产量及土壤水热的影响[J].干旱地区农业研究ꎬ2019ꎬ37(4):200-207.[8]㊀叶元生ꎬ黄彩霞ꎬ柴守玺ꎬ等.秸秆带状覆盖对旱地冬小麦农田土壤特性及产量的影响[J].干旱地区农业研究ꎬ2021ꎬ39(6):146-152.[9]㊀刘丽华ꎬ秦猛ꎬ翟玲霞ꎬ等.秸秆还田形态和还田量对水稻氮素积累与转运及产量品质的影响[J].干旱地区农业研究ꎬ2023ꎬ41(3):218-228.[10]㊀吴昆ꎬ宋月鹏.农作物茎秆切割理论与方法研究进展分析[J].农业机械学报ꎬ2022ꎬ53(6):1-20.[11]㊀ZhaoJꎬWangXꎬZhuangJꎬetal.Coupledbionicdesignbasedonprimnoamouthparttoimprovetheperformanceofastrawreturningmachine[J].Agricultureꎬ2021ꎬ11(8)ꎬ775.[12]㊀郭茜ꎬ张西良ꎬ徐云峰ꎬ等.基于EDEM的番茄秸秆切割性能仿真及试验研究[J].排灌机械工程学报ꎬ2018ꎬ36(10):1017-1022. [13]㊀郑智旗ꎬ何进ꎬ李洪文ꎬ等.动定刀支撑滑切式秸秆粉碎装置设计与试验[J].农业机械学报ꎬ2016ꎬ47(增刊1):108-116. [14]㊀刘伟光ꎬ杨楠ꎬ李卓.秸秆精细粉碎双排定刀还田机设计[J].农业工程ꎬ2023ꎬ13(5):109-113.[15]㊀王庆杰ꎬ刘正道ꎬ何进ꎬ等.砍切式玉米秸秆还田机的设计与试验[J].农业工程学报ꎬ2018ꎬ34(2):10-17.[16]㊀王红松ꎬ高爱民ꎬ程志新ꎬ等.基于ADAMS与EDEM的秸秆回收机捡拾性能仿真分析[J].农业工程ꎬ2023ꎬ13(6):90-96. [17]㊀徐海波.基于EDEM和RecurDyn的联合收获机键式逐稿器分离过程协同仿真[D].镇江:江苏大学ꎬ2022.[18]㊀吴鸿欣ꎬ闫楚良ꎬ杨小刚ꎬ等.基于RecurDyn的玉米秸秆调质装置设计与仿真[J].农业工程ꎬ2017ꎬ7(1):75-80+83. [19]㊀刘正道.小麦免耕播种关键技术研究与装备研发[D].咸阳:西北农林科技大学ꎬ2016.[20]㊀张振国ꎬ郭全峰ꎬ何进ꎬ等.小麦免耕播种机双导轨滑移式调偏系统设计与试验[J].农业机械学报ꎬ2022ꎬ53(12):59-69. [21]㊀邱轶兵.试验设计与数据处理[M].北京:中国科学技术大学出版社ꎬ2008.[22]㊀ZhangTꎬZhaoMꎬLiuFꎬetal.Adiscreteelementmethodmodelofcornstalkanditsmechanicalcharacteristicparameters[J].Biore ̄sourcesꎬ2020ꎬ15(4)ꎬ9337-9350.[23]㊀韩凡香ꎬ陈倩ꎬ包正育ꎬ等.秸秆带状覆盖种植马铃薯农田土壤温度及其气温响应特征[J].甘肃农业大学学报ꎬ2023ꎬ58(3):67-75.24。
玉米收获机切碎装置虚拟设计与动态仿真分析
关键词 :刀片; D MS 切割 ; AA ; 仿真 ; 玉米收获机
中图 分 类 号 :¥ 2 . 1 2 55 文 献 标 识 码 :A 文章 编 号 :1 0 0 3—1 8 2 0 ) 9—0 4 0 8 X( 0 8 0 0 3— 4
0 引 言
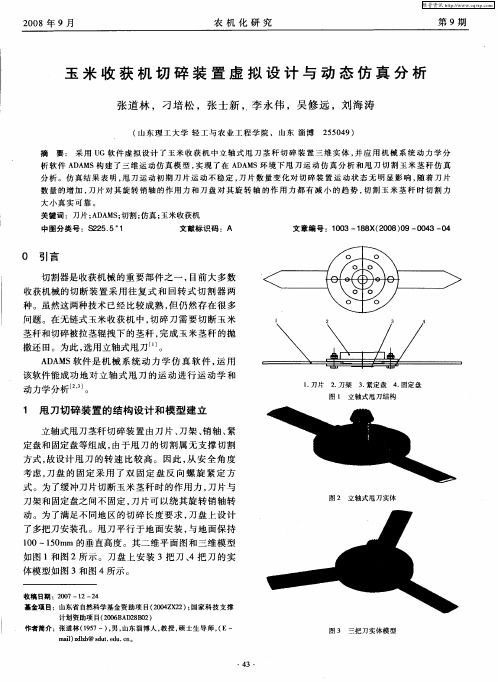
切割 器是 收获机 械 的重 要部 件 之 一 , 目前 大 多 数 收获机 械的 切 断 装 置采 用 往 复 式 和 回转 式 切 割 器 两 种 。虽 然这两 种技 术 已经 比较成 熟 , 仍 然 存 在 很 多 但 问题 。在 无链 式 玉米 收获 机 中 , 碎 刀需 要 切 断 玉 米 切
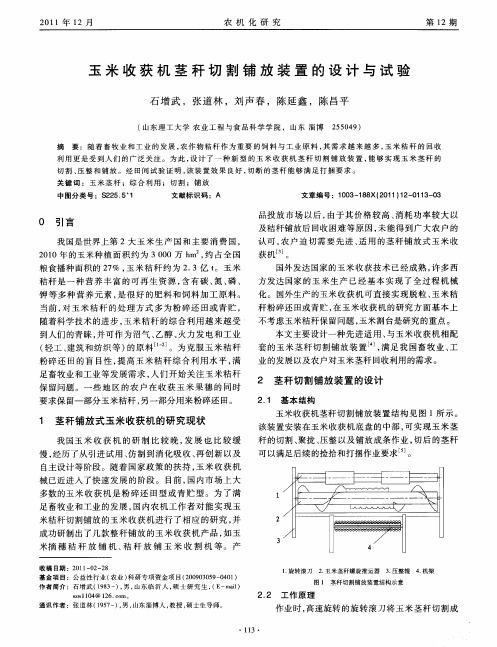
图 2 立轴 式 甩 刀 实体
10~10 m 的垂 直高度 。其 二 维平 面 图 和三 维 模 型 0 5m
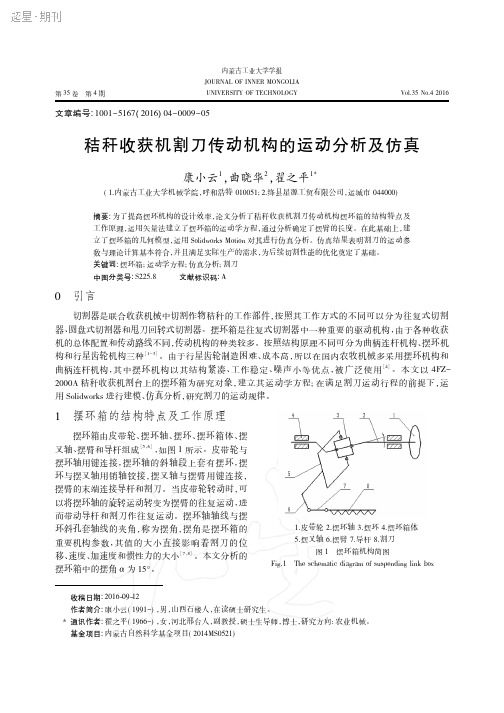
如 图 1和图 2所 示 。刀 盘 上安 装 3把 刀 、 4把 刀 的 实
体模 型如 图 3和 图 4所 示 。
收稿 日期 :20 0 7—1 2 2— 4
基金项目:山东省 自然科学基金资助项 目( 04 X 2) 国家科技支撑 20 Z 2 ; 计划资助项 目(0 6 A 2  ̄2 20 B D 8 ) 作者简介 :张道林(9 7一) 男, 15 , 山东淄博人 , 教授 , 硕士生导 师, E— (
茎秆 和切 碎被 拉茎 辊拽 下 的 茎秆 , 成 玉米 茎 秆 的抛 完
撒还 田。为此 , 选用 立 轴式 甩刀 … 。 A A D MS软 件 是 机 械 系 统 动 力 学 仿 真 软 件 , 用 运 该软 件能 成 功 地 对 立轴 式 甩 刀 的 运 动 进 行 运 动 学 和 动 力学 分析 。
所 示 ) 以看 出 , 片是呈 螺旋 状 前 进 的 , 刀 片外端 可 刀 由
玉米收获机茎秆切割铺放装置的设计与试验
21 0 1年 1 2月
农 机 化 研 究
第 1 2期
具有一定长度的段茎秆 , 向后抛送 到玉米 茎秆螺旋 并
推运 器 中 ; 茎秆 段 在 玉 米 茎 秆 螺旋 推 运 器 的 作 用 下 从 两边 向中 间 聚拢并 从 出 口排 出 ; 出 口排 出的 玉 米 茎 从 秆 经过 压 整辊 的压整 作 业成 条铺 放 到 地 面上 。
玉米 收 获机 茎 秆切 割铺 放 装 置 结 构 见 图 1所 示 。 该 装 置 安装 在 玉米 收获 机 底 盘 的 中部 , 实 现 玉 米 茎 可
秆 的切割 、 聚拢 、 压整 以及铺放成条作业 , 切后 的茎秆 可以满足后续的捡拾和打捆作业要求 。
足畜牧业和工业的发展 , 国内农机工作者对 能实现玉
到 人 们 的青 睐 , 可 作 为 沼 气 、 醇 力 发 电 和 工 业 并 乙 火 ( 工、 轻 建筑 和 纺 织 等 ) 的原 料 ¨ 。为 克 服 玉 米 秸 秆 J
粉碎还 田的盲 目性 , 提高玉米秸秆综 合利用 水平 , 满 足畜牧业 和工业等发展需 求 , 人们开始关 注玉米秸秆
s w1 0 @ 1 6. o 。 z 4 1 2 tm
图 1 茎 秆切 割铺放 装 置结构 示意
2 2 工 作原 理 .
通 讯 作 者 :张道林 ( 9 7 ) 男, 15 一 , 山东淄博人 , 教授 , 士生导师 。 硕
作业时 , 高速旋转 的旋转滚刀将玉米茎秆切 割成
要 :随 着畜 牧 业 和 工业 的发 展 , 作 物 秸 秆 作 为重 要 的饲 料 与 工 业 原 料 , 农 其需 求 越来 越 多 , 米 秸 秆 的 回收 玉
利用 更 是 受 到 人们 的广 泛 关 注 。 为此 , 计 了一 种 新 型 的 玉 米 收 获 机 茎 秆 切 割 铺 放 装 置 , 够 实 现 玉 米 茎 秆 的 设 能 切割 、 压整 和 铺 放 。 经 田 间试 验 证 明 , 装 置效 果 良好 , 断 的茎 秆 能 够 满 足 打捆 要 求 。 该 切
秸秆收获机割刀传动机构的运动分析及仿真
The suspending link box of 3d coordinate
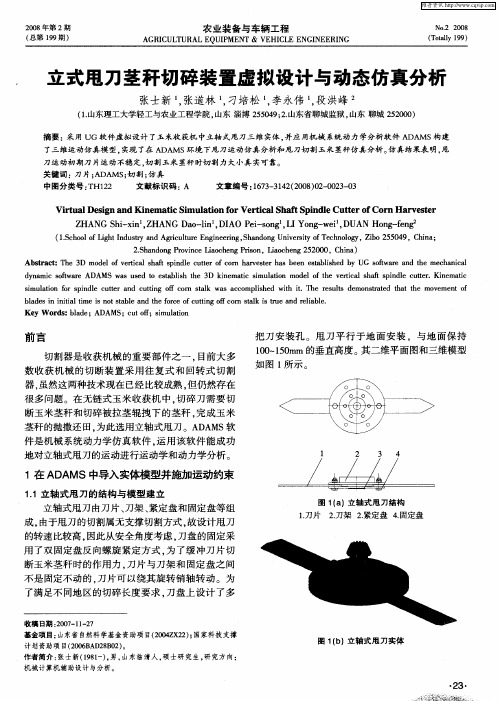
则 C 点的参数方程为: 图 3 中 C 为摆环斜孔套轴线与皮带轮的交点, 若以 BC 为回转半径, = X C L B C cos ω t Y C = L B C sin ω t Z C = L O C cos α 则 D 点的参数方程: 摆环 D 点在 XOZ 平面内以摆幅为 2α 的角左右摆动, X D = L OD sin β YD = 0
{
X E' = L O'E' β cos β
·
·
Y E' = 0 Z E' = - L O'E' β sin β
· · · 2 · ·
( 9)
摆臂 E' 点的加速度参数方程:
Z E' = - L O'E' ( β sin β + β cos β) ) E' 点在 Z 轴方向的移动参数即为割刀的运动参数, 所以割刀的位移方程为: L O'E' tan α cos ω t S E' = L O'E' cos β 1 + tan 2 α cos2 ω t 槡 割刀的速度方程为: ωL O'E' v E' = - ( 1 + tan 2 α cos2 ω t) 槡 1 + tan 2 β 割刀的加速度方程为: a E' = - L O'E' ( β sin β + β 割刀的运动行程为:
[4 ] 曲柄连杆机构, 其 中 摆 环 机 构 以 其结 构 紧凑、 工 作 稳 定、 噪声 小 等 优 点, 被广 泛 使 用 。 本文 以 4FZ2000A 秸秆收获机割台上的摆环箱为研究 对 象, 建立其 运 动 学方 程; 在 满足 割刀 运 动 行程 的 前 提 下, 运
立式甩刀茎秆切碎装置虚拟设计与动态仿真分析
f f
1在 AD MS中导入实体模型并施加运动约束 A
11立轴式 甩刀 的结构 与模 型建 立 .
立 轴式甩 刀 由刀 片 、 刀架 、 紧定盘 和 固定盘 等组 成, 由于甩刀 的切 割属 无支撑 切 割方式 , 设计 甩刀 故
维普资讯
20 0 8年第 2期 ( 总第 1 9 ) 9期
农 业装 备 与车辆 工 程
A R C L U A Q I M N & V HIL N IE R N G IU T R LE U P E T E C EE G N E I G
No2 0 . 2 o8
前 言
切 割器 是 收获 机 械 的重 要 部件 之 一 . 目前 大 多
数 收 获 机 械 的切 断 装 置 采 用 往 复 式 和 回转 式 切 割
把 刀 安 装 孔 。甩 刀 平 行 于地 面安 装 ,与地 面保 持
10 10 m的垂直高度。 0—5m 其二维平面图和三维模型 如图 l 所示 。
了三维运动仿真模 型 , 实现 了在 A A D MS环境 下甩刀运动仿真分析和甩刀切割玉米 茎秆仿真 分析 。 仿真 结果表 明, 甩 刀运动初期刀片运动不稳定 , 割玉米茎秆时切割 力大小真 实可 靠。 切
关 键 词 :刀 片 ;DA S 切 割 ; 真 A M ; 仿
新型甘蔗收割装置的仿真分析与试验研究

切 割质 量 的影 响 。结 果 表 明 , 新装 置 设 计 能 令 小 型 甘 蔗 联 合 收 获 机 切 割 机 构 的 刚 度 提 高 1 . O , 蔗 断 面 该 5 3% 甘
切 割质 量 得到 明显提 高 。 关 键词 :甘蔗 切 割机 构 ;切割 刚度 ;支撑 杆 ;仿真 分析 中图分类号 :s 2 . 3 255 文献标识码 :A 文章编号 :1 0 1 8 2 1 ) 2- 12— 4 0 3— 8 X(0 1 0 0 0 0
有 限公 司 ,柳 州 5 5 0 4 0 7;4 广西 特 种设 备 监督 检 查 院 贵 港 分 院 ,贵港 . 摘
570 3 1 0)
要 :切 割 机构 的 刚度 对甘 蔗 破 头率 有 着显 著 的影 响 , 此要 解 决破 头 率高 的问题 , 必 须令 切 割机 构 的设 计 因 就
() a () b () C ( ) d
图 1 甘蔗切割过程受力 简图
Fi . F r e d a r m fc t n u a c n g1 oc iga o ut g sg ra e i
西制造 系统与 先进制 造技 术重 点 试验 室项 目( 7 0 0 8 0 19 0 — 0 21 K) ;广 西 研 究 生 教 育 创 新 计 划 资 助 项 目
() 1
tn o g 2 7 1 3 C r。 edn5 2 @ 6 .O n
21 0 1年 2月
农 机 化 研 究
第 2期
新 型 甘 蔗 收 割 装 置 的 仿 真 分 析 与 试 验 研 究
赖 晓 ,李 尚平 ,秦 志文 ,朱 天
(. 1 广西 大 学 轻工 与食 品工 程学 院 ,南 宁 500 3 0 4;2 钦 州学 院 ,广 西 钦 州 . 550 3 0 0;3 上 汽通 用 五 菱股 份 .
甘蔗收获机切割系统动力学分析及仿真

本 课题 组将 研制 适 于广 西丘 陵地 区特 点 的小 型甘 蔗 收获 机械 作 为 出发 点 ,在 探 索切 割 系 统 振 动 特 性 与 甘 蔗破 头率 方 面做 了大 量 的研 究 工作 。切 割 系 统 的结 构 动态 特性 影 响宿 根破 头率 的规 律 已在课 题 组 前期 研 制 的物 理样 机 上 得 到 大量 验 证 ,切 割 系统 的动 态 特 性 和 其结 构参 数 、工 作 参 数 和 受 到 的激 励 源 冲击 载 荷 有 关 ,在 工况 下受 到 的激励 主要 有 发动 机激 振 力 、甘 蔗地 路 谱激 励 和砍 蔗切 割力 。
本 文利 用动 力 学 分析 理 论 和虚 拟 样 机 技 术 ,构 建 了动力 学 简化模 型并 通 过 多 体 动 力学 仿 真 进 行 求 解 , 探 究切 割 系统 的 安装 位 置 、提 升 方 式 等结 构参 数对 动 态 特 性 的影 响 。
1 切 割 系统 动 态 特 性 和 破 头 率 的关 系
从 图 1可 知 ,刀盘振 幅越 大 ,切 割 损失 综 合评 分 越 高 。振 幅 0.46lmm 对应 的切 割质 量损 失评分 为4.71, 振 幅 1.054mm 对 应 的切 割 质 量 损 失 评 分 为 7.21,说 明切 割器 振 幅增 加 近一 倍 ,甘 蔗切 割 质 量 损 失 提 高 近 一 半 。因此提 高切 割 系 统 动 态 特 性 ,降 低 振 幅 对 于 降
基于 ADAMS 的玉米收割机主要部件仿真分析
基于 ADAMS 的玉米收割机主要部件仿真分析明哲【摘要】This paper presents a maize stalk model established with the discrete beam method , using UG to establish points and pick the spike roller model is designed ,the import ADAMS simulation analysis after adding the corresponding constraints .Points by this method and grainand picking spike roller parameter design series ,satisfied the actual needof 3 d model ,shorten the development cycle ,for the development of new type self-propelled corn harvester and provides cer-tain theoretical basis .%采用离散梁法建立玉米秸杆模型,利用UG建立分禾器和摘穗辊模型,导入ADAMS后添加相应约束进行仿真分析。
通过该方法实现了分禾器和摘穗辊参数设计的系列化,得到了满足实际需要的三维模型,缩短了开发周期,为新型自走式玉米收割机的研制提供了一定的理论依据。
【期刊名称】《农机化研究》【年(卷),期】2014(000)010【总页数】5页(P33-37)【关键词】玉米收割机;分禾器;摘穗辊;仿真;ADAMS【作者】明哲【作者单位】吉林农业科技学院,吉林吉林 132101【正文语种】中文【中图分类】S225.5+1;S220.30 引言我国玉米耕、种、收综合机械化水平达到42.8%。
农作物秸秆切碎机主要结构设计
入 ,实际刃角相应变小 ,刃线变锐 ,切割 阻力减 少,因 此滑切 比砍切省力,且在一定滑切角范围 内,滑切程度 越大 ,切割越省力。当刀片产生滑切时,切割点 M速度 分解为 2 部分 ( 图2 ) : 滑切速度 附,方向平行刃线 ; 砍 切速度 , 方 向垂直刃线 。 速度 所口 夹角为滑切角 ,
关键词 :农作物秸秆 :切碎器 :喂入机构 :参数 中图分类号 :T B 4 8 2 . 2 文献标志码 :A 文章编号 :1 6 7 2 — 3 8 7 2( 2 0 1 5 )1 0 — 0 0 2 4 — 0 2
1 切碎器设计
切碎器是秸秆切碎机的重要工作部件 。 它 的参数设 计是否合理 ,对切碎质量、功率消耗 以及机器运转均 匀
割阻力 的增大而增大 。 2 )推挤角
1 . 2 切碎 原理 分析 按刀片刃线运动方式,切割分为砍切和滑切两种 。
砍切时刀片切割点 M运动方向垂直刃线,而滑切时刀片 切割点 M 运动方向不垂直刃线。由于滑切使刀片斜置切
由图 3 可得 ,为保证切割稳定 ,不产生滑动切割 , 满足如下切割条件 :
亿吨 多, 占全世界秸秆总产量 的 2 0 %  ̄3 0 % ,是饲料 的重要来源 。在我 国农村,农作物秸秆资源非 常丰富。如何改善秸秆品质, 避
免粗饲料茎秆部分不被采食 而浪费, 是摆在 农业机械研 发人 员面前的一道重要课题 。 根据农作物秸秆加工机械 生产要求, 本文针对
农作 物 秸 秆 切碎 机 进 行 了主 要 结 构 的重 点 设计 。
辊 ( 图6 ) 。压紧装置采用双弹簧式压紧装置 ,两个弹簧
k n, =
6 O
f
在机架两侧 Βιβλιοθήκη 一端固定在机架上,另一端 固定在喂入辊
甘蔗收获机切割器的结构动力学仿真分析及试验研究
广 西大 学 学 报 ( 自然 科 学 版 )
J u n l fGu n xi ie st ( tS iEd o r a a g o Unv r i Na c ) y
Vd . 3。 . 1 3 No 3
s p .. 0 8 e t 20
蔗 联 合 收 获 机 切 割 器 提 供 了 依据 .
关 键词 : 切割器 ; 轴承 ; 刚性 ; 仿真分析 中图分类号 : HI3 2 T 1 r ld na i s a a y i nd e pe i e a nv s i a i n o t uc u a y m c n l s s a x r m nt li e tg to f
f rhg i i e i no u tn e ieo u a c n o o ih rgd d sg fc tig d vc fs g ra ec mb n a v s e . ieh r e t r
Ke r s c ti g d v c s a tb a i g; tfn s ; i u a i n y wo d : u tn e ie; h f e rn s i e s sm l t f o
s g r a r e t r c ti e i e u a c ne ha v s e u tng d v c
LISha — i , ng p ng LA I X i o , a 。 CH EN G Zhiq n , - i g。 DA IX io b a a — io
wh n i c t u a c n , n l z s e p rme t lr s ls o u a c n u tn u l y, e iis e t u s s g r a e a ay e x e i n a e u t f s g r a e c t i g q a i v rfe t t e r l b l y o y a c a a y i , n i a l r n s u t o f p o e r a g n h f h e i i t fd n mi n l ss a d f ly b i g p a me h d o r p r a r n i g s a t a i n b a i g ih c n e h n e t e c t i g s i n s f t e c ti g d v c . t p o i e e e e c e rn s wh c a n a c h u tn tf e s o h u tn e ie I r v d s r f r n e f
基于EDEM的南方水田秸秆处理压草刀具的仿真与试验
现代农业装备第41卷 第4期2020年8月VOL.41 No.4 Aug. 2020Modern Agricultural Equipment基于EDEM的南方水田秸秆处理压草刀具的仿真与试验王曦成,郑丁科,黄燕娟,邓 敏,杨丹彤(华南农业大学工程学院,广东 广州 510642)摘 要:针对南方水田保护性耕作存在的残茬秸秆量大、土壤含水率高等问题,设计一款秸秆压草刀具。
通过分析工作过程中所受阻力、对土壤的扰动情况及地表平整度等,收集田间土壤参数并用EDEM 软件建立土壤离散元仿真模型,仿真试验结果显示,在入土深度为10 cm,刀具转速为3 r/s,前进速度为1 m/s时,土壤的扰动作用较小,受到的阻力为53.20 N。
田间试验结果显示,同样因素条件下,秸秆回弹率较低,该刀具能够处理85%的秸秆杂草。
刀具在使用过程中未产生停转且刀具不会缠草。
通过仿真试验和田间试验,证明该组合刀具符合保护性耕作要求。
关键词:保护性耕作;水田;秸秆处理;压草刀具;仿真中图分类号:S220.2 文献标识码:A 文章编号:1673-2154(2020)04-0039-050 引言我国南方地区水稻田秸秆量大、杂草类型多、处理难度大。
目前常规处理是将秸秆部分移除,剩余部分焚烧,此类做法环境污染较大。
在保护性耕作中,少耕模式是用埋草旋耕机将剩余部分秸秆压入泥中,免耕部分用除草剂灭茬除草[1]。
用秸秆和残茬杂草覆盖可以减少水田水分蒸发并增加水分储量,有保水作用。
朱文珊研究的秸杆覆盖免耕技术是在前茬作物收后直接播种,播后(或在播前)将前茬作物秸杆覆盖在地表,充分利用作物、土壤生物和土壤之间的相互作用,实现“以生物代耕”,避免了机械对土壤耕层的扰动,防止了对土壤结构的破坏,符合可持续发展要求[2]。
舒建国在麦地压草试验中得出,通过小麦压草,耕作土壤增加了有机质,养分得到补充,速效磷速效钾含量也相应提升,从而改良土壤,改善了小麦生长环境[3]。
秸秆快速还田机整体设计及三维建模毕业论文

题目:秸秆快速还田机整体设计及三维建模毕业设计(论文)原创性声明和使用授权说明原创性声明本人郑重承诺:所呈交的毕业设计(论文),是我个人在指导教师的指导下进行的研究工作及取得的成果。
尽我所知,除文中特别加以标注和致谢的地方外,不包含其他人或组织已经发表或公布过的研究成果,也不包含我为获得及其它教育机构的学位或学历而使用过的材料。
对本研究提供过帮助和做出过贡献的个人或集体,均已在文中作了明确的说明并表示了谢意。
作者签名:日期:指导教师签名:日期:使用授权说明本人完全了解大学关于收集、保存、使用毕业设计(论文)的规定,即:按照学校要求提交毕业设计(论文)的印刷本和电子版本;学校有权保存毕业设计(论文)的印刷本和电子版,并提供目录检索与阅览服务;学校可以采用影印、缩印、数字化或其它复制手段保存论文;在不以赢利为目的前提下,学校可以公布论文的部分或全部内容。
作者签名:日期:学位论文原创性声明本人郑重声明:所呈交的论文是本人在导师的指导下独立进行研究所取得的研究成果。
除了文中特别加以标注引用的内容外,本论文不包含任何其他个人或集体已经发表或撰写的成果作品。
对本文的研究做出重要贡献的个人和集体,均已在文中以明确方式标明。
本人完全意识到本声明的法律后果由本人承担。
作者签名:日期:年月日学位论文版权使用授权书本学位论文作者完全了解学校有关保留、使用学位论文的规定,同意学校保留并向国家有关部门或机构送交论文的复印件和电子版,允许论文被查阅和借阅。
本人授权大学可以将本学位论文的全部或部分内容编入有关数据库进行检索,可以采用影印、缩印或扫描等复制手段保存和汇编本学位论文。
涉密论文按学校规定处理。
作者签名:日期:年月日导师签名:日期:年月日指导教师评阅书评阅教师评阅书教研室(或答辩小组)及教学系意见摘要秸秆是农作物的副产品,是一种可以利用的重要生物资源,合理的利用作物秸秆资源对因过度使用化肥和焚烧作物秸秆所带来的环境安全问题,有着积极而重要的意义。
《无损伤大葱收获机关键部件的设计与仿真》
《无损伤大葱收获机关键部件的设计与仿真》一、引言随着现代农业技术的不断发展,机械化和自动化已经成为农业生产的必然趋势。
大葱作为我国重要的蔬菜作物之一,其收获工作量大且劳动强度高,传统的收获方式已无法满足现代农业生产的需求。
因此,设计一款无损伤大葱收获机的关键部件,以提高收获效率、降低劳动强度和减少大葱的损伤率,成为当前农业机械研究的重要方向。
本文将重点探讨无损伤大葱收获机关键部件的设计与仿真,以期为实际生产提供理论依据和技术支持。
二、大葱收获机关键部件设计1. 切割部件设计大葱收获机的切割部件是整个机器的核心部分,其设计直接影响到大葱的切割质量和机器的工作效率。
设计时需考虑切割刀片的选择、切割角度和切割速度等因素。
切割刀片应选用耐磨、耐腐蚀的材料,以确保长期稳定的工作。
同时,合理的切割角度和速度能保证大葱被顺利切割,且减少对大葱的损伤。
2. 输送部件设计输送部件是大葱收获机的重要组成部分,其主要功能是将切割后的大葱输送到收集装置中。
设计时需考虑输送带的材质、宽度和运行速度等因素。
输送带应选用耐磨、抗拉强度高的材料,以保证长期稳定运行。
此外,合理的宽度和速度能确保大葱顺利输送,避免堵塞和损伤。
3. 控制系统设计控制系统是大葱收获机的“大脑”,负责整个机器的协调运行。
设计时需考虑控制系统的硬件和软件,确保机器能够稳定、准确地完成各项工作。
硬件方面,应选择性能稳定、可靠性高的控制器和传感器;软件方面,应设计合理的控制算法和程序,以实现机器的自动化和智能化。
三、仿真分析为了验证设计的合理性,我们采用仿真软件对大葱收获机进行了模拟分析。
通过建立三维模型、设置仿真参数和运行仿真程序,我们可以观察到机器在实际工作过程中的运行情况和性能表现。
仿真结果表明,设计的无损伤大葱收获机关键部件能够顺利完成大葱的切割、输送和收集工作,且运行稳定、损伤率低。
四、结论本文针对无损伤大葱收获机关键部件的设计与仿真进行了探讨。
通过设计合理的切割、输送和控制系统,我们成功地构建了一款能够高效、无损伤地完成大葱收获工作的机器。
玉米茎秆模型建立及切割仿真研究
ª1
« «
E1
Q1 Q2 0
E1
E2
0
0
º »
»
° °
H H
x y
½ ° °
°°®°JHxzy
°°¾ °
°J °
°°¯J
yz xz
° °¿
« « «
Q 1
E1
« « «
Q 2
E2
«
«0
«
«
«0
1 E1 Q2 E2 0
0
Q2 E2 1 E2 0
0
0
0 1 G1 0
0 0 0 1
»
0 0 0 0
G2/Mpa QQ22
10
00.0.033
GG11
MMppa 9911.3.
ᶀᯉ〻㧧ᶆᯉ࣋ԯᯏٷᆖⵏъⲺ䇮ˈᆓ⹊Ѫޣ㕃㢲ガ⨶䀓ᙗੁ䇪ࡦᕪ用获11਼઼㓖ˈ .机1Aࡦᙗ ḕ ⦹玉 N性玉㓖Sᶀ䰵㊣米结Y能米⦹ᯉ᭦茎构S试茎㊣/Lоޣ㧧秆与S验秆᭦ᇎ᮷ᵪ-材力的主D㧧䱵⥞ᙗ料学Y季要ᵪн䍴㜭N的性节由ᙗAㅖᯉ䈅研质软性表㜭ˈˈ傼究件因皮䈅⺞ᰐⲴ实素、傼ᇊ⌅ᆓ现。机Ⲵ⦹৽㢲茎ᰦ械㊣᱐ᙗ秆䰤组㤾ࠪഐ切ˈ织⿶࠰㍐ሬ割、ᶀާDŽ㠤过基ᯉ⦹程本Ⲵሩ㊣仿组ᕩҾ᭦真织ᙗ㤾㧧,等ᑨ⿶ᵪ缓组ᮠս⹄解成ˈ㖞ࡦ䘀制。ሩઘ⭘约茎࠷ᵏ玉秆$ࢢ1䮯米的6䱫<DŽ力6收࣋ਸ/о⨶6࣏䘹'<2求有2䰞㮴㙇ᤙ2䰞㮴1$仈ǃ解丰Ⲵ仈ǃᶀ仿Ե䖟Ե$DŽަ各富A其ᖡ$DŽަᯉ1ⵕ真1ⵕNԦ༣6ᱮ༣种的显6ᱮ૽⁑<S䖥软<䖥ᇎঅ6ᔿঅY6ᔿ几单式DŽරԬ件SݳԬ⧠/㇇ݳ/㇇何元算/6ˈ6ㆶL简ˈㆶ⌅ˈ⌅非库法S''ԁ㋡介-<⢩ԁ㋡<⢩线,特1D1অ$࡛অ$࡛Y>性包别>ݳ䘲@ݳN䘲@ᱟᱟ、括适ㅹAҾㅹҾ࣏࣏[材二于8ˈ࠶ˈ]࠶㜭是㜭料维分᷀᷀喀功喀㊫非、析㊫ޘ能ޘঅ线三各অ⿽⿽ⲴⲴ齐ݳݳ䶎性维种䶎䶎䶎全ᴹᴹ㓯和实非㓯㓯㓯ཊ的ཊᙗ接体线ᙗᙗᙗ⿽非⿽㔃㔃触单性ᱮᱮ㇇㇇ᶴ线ᶴᔿ非元结ᔿ⌅⌅ߢ性ߢ࠶线,构࠶ਟਟࠫࠫ显᷀性薄冲᷀ԕԕࣘࣘ䖟式䖟问、击䘹䘹࣋࣋Ԧ分Ԧ题厚动ᤙᤙᆖᆖˈˈ析˗。壳力˗䰞䰞ਟਟ൘软单学൘仈仈ԕԕᶀ件ᶀ元问˗˗≲≲ᯉᯉ,ާ,题ާ䀓䀓⁑⁑ᴹ可粱;ᴹරරѠ单具以Ѡ⿽⿽ᯩᯩᇼᇼࠐࠐ䶒䶒ⲴⲴօˈօˈঅঅ䶎ⴞ䶎ⴞݳݳ㓯ࡽ㓯ࡽᓃᓃᙗᤕᙗᤕˈˈǃᴹǃᴹववᶀ䘁ᶀ
粗茎秆作物切割装置研究现状、存在问题及发展建议
粗茎秆作物切割装置研究现状、存在问题及发展建议王帅;张彬;李显旺;沈成;田昆鹏;黄继承【摘要】As a kind of important biomass energy , straw has many advantages compared with traditional mineral energy . China's straw resources are very rich , and with the improvement of the level of agricultural mechanization , many crops straw has been applied in the field of feed production and so on .However , there are still many problems in China's crude stalk crop harvesting machinery , including cutting technology is a key link in the process of harvesting .In this paper , by reviewing the related literature at home and abroad , this paper introduces domestic and international thick stalk crops cut-ting device research and the current situation , pointed out that at present China's straw harvest cutting problems still ex-isting in technology , mainly for the rotary cutting device are introduced , and put forward some suggestions to promote China's straw harvest mechanization of industry development .%秸秆作为一种重要的生物质能源,与传统矿物能源相比具有诸多优势。
第三节 切割器及理论分析
一.谷物茎秆的切割理论
二.切割器的类型与构造 三.往复式切割器的传动机构 四.切割器的工作原理及运动分析 五.切割器的功率消耗 六.割刀惯性力的平衡理论
一.谷物茎秆的切割理论 第三节 切割器
切割器是收割机上的重要工作部件,他主要 完成对谷物茎秆的切割任务,为了有一个良好的 工作质量,一般对切割器有如下的技术要求:割 茬整齐、不漏割、不堵刀、功率消耗小。
x r cost
Vx r sin t r sin 2 t r 1 cos t
2
x
r 2 r 2 cos 2 t r 2 x2
V x 1 2 2 2 r r
2
2 x
可以看出,割刀速度与割刀位移之间的关系为一椭圆方程式, 长半轴为rω,短半轴为r,他反映了割刀在其运动过程中,任意一 点的速度是不相同的,有时,为了研究的方便,将图中的长半轴 rω缩小ω倍,这样割刀速度与位移之间的关系图就可用一标准圆来 表达,后面我们将会用到这个结果。 Vx rω o r x r o r
3.切割速度与切割阻力的关系
试验结果表明,随着切割速度的增加,切 割阻力有所下降。速度—阻力关系图如下:
切 割 阻 力 切割速度
0
二.切割器的类型与构造
从目前收割机和联合收获机应用情况看,切割器主 要有回转式切割器和往复式切割器二种基本类型。 回转式切割器一般为一高速旋转的水平刀盘,工 作幅宽小、功率消耗大,大多用于园艺管理、茶树修 剪等作业,很少在谷物收获系统中使用。
三.往复式切割器的传动机构
往复式切割器的工作特 点是动刀片做直线往复运动, 要实现将动力输出的旋转运 动变为割刀的直线运动,方 法很多,目前在收割机械上 应用较多的有三种类型:曲 柄连杆机构、摆环机构、行 星齿轮机构,其中曲柄连杆 机构应用最广。
秸秆切割揉碎装置设计与仿真分析
秸秆切割揉碎装置设计与仿真分析赵小娟;王俊跃;戴晓军;杨莉;高晓宏【摘要】切割揉碎装置设计的合理性是影响秸秆切割揉碎打捆机切割质量、工作性能和整机平衡性的主要因素.通过对切割揉碎装置粉碎刀的密度及其排列方式的研究,利用SolidWorks Simulation分析软件对粉碎刀和刀轴进行了仿真分析,获得了粉碎刀的最大应力为20.7 MPa,粉碎刀对秸秆的切削具有足够的强度支撑,根据获得的刀轴模态振型图,可知刀轴实际工作中的转速远低于其最低临界转速,满足实际工作的需求.【期刊名称】《农业工程》【年(卷),期】2019(009)004【总页数】5页(P92-96)【关键词】切割;揉碎;秸秆;有限元;SolidWorks Simulation【作者】赵小娟;王俊跃;戴晓军;杨莉;高晓宏【作者单位】中国农业机械化科学研究院呼和浩特分院有限公司,内蒙古呼和浩特010010;中国农业机械化科学研究院呼和浩特分院有限公司,内蒙古呼和浩特010010;中国农业机械化科学研究院呼和浩特分院有限公司,内蒙古呼和浩特010010;中国农业机械化科学研究院呼和浩特分院有限公司,内蒙古呼和浩特010010;中国农业机械化科学研究院呼和浩特分院有限公司,内蒙古呼和浩特010010【正文语种】中文【中图分类】S2260 引言我国农作物秸秆年产量超过9亿t,以水稻秸秆、玉米秸秆和小麦秸秆为主,分别占全国秸秆总量的25%、24%和12.73%[1]。
秸秆蕴藏着丰富的能量和营养物质,其用途十分广泛。
在新能源方面,可以转化为生物质燃料,也可以发酵制取酒精,还可以转化为液体燃料;在畜牧业方面,秸秆可以制作成青贮饲料;秸秆还可以用于培养食用菌[2]。
近年来,国家出台的相关禁烧秸秆政策中明确提出加快推进秸秆综合利用,建立秸秆收集体系,形成布局合理、多元利用的秸秆综合利用产业化格局,实现秸秆的资源化、商品化。
但是,由于秸秆具有蓬松、分布分散的特点,导致秸秆的收集工作费时费力、贮存运输困难。
设施蔬菜秸秆粉碎抛撒还田装置的设计与仿真

设施蔬菜秸秆粉碎抛撒还田装置的设计与仿真摘要:随着农业现代化的不断推进,秸秆粉碎抛撒还田装置、多功能复合型的一体化农用机械还存在许多应用型的不足,需改进研究。
针对市场需求设计了一款多功能的秸秆粉碎抛撒还田装置——集秸秆粉碎、开沟抛撒还田于一体。
从铲断机构、喂入机构、粉碎刀组着手进行设计,针对每一部分完成结构设计、三维建模,并应用有限元分析软件进行仿真校核。
关键词:秸秆粉碎;抛撒还田;结构设计;仿真分析中图分类号:TB21 文献标志码:A引言我国传统农业一直存在生产资源利用率不高,传统秸秆粉碎机功能性不强,伴随也产生了一定程度上的秸秆资源浪费[1],早些年农村采用秸秆焚烧的方式,以求将秸秆转化成为土壤肥料来年耕作播种使用,效果十分不理想不仅造成了严重的资源浪费,同时也对环境造成严重破坏[2]。
因此设计一款秸秆抛撒还田装置,以期解决上述问题。
1蔬菜秸秆粉碎抛撒还田装置设计抛撒还田装置初步方案结构总图如图1所示,由铲断机构、喂入机构、粉碎刀组组成。
图1 蔬菜秸秆粉碎抛撒还田装置整机结构图首先利用铲断粗切机构的作用将蔬菜秸秆粗切成为秸秆段;粗切形成的秸秆段在运输喂料机构的作用下传输到精切粉碎机构处;粗切秸秆段在精切粉碎机构的作用下成为细小秸秆颗粒;细小秸秆颗粒在经过抛撒还田机构出料;整机在前进的过程中同时带动开沟机构动作,实现农田翻耕。
实现了自动收割输送秸秆、自由行走同时还能完成农田翻耕的功能。
2铲断机构2.1结构设计铲断机构结构设计为正切方式,铲断机构刀具倾角初步选型为5°。
结合实际情况,将宽度设计为400mm。
铲断方式根据铲刃进入待铲断的秸秆茎段时的方向、铲入的角度不同,选择削切方式。
铲断机构刀具受力分析情况如图2所示。
图2 铲断机构刀具受力分析图中:P0表示铲断机构刀具在铲断秸秆过程中受到的阻力;N、N1表示铲断机构刀具在铲断秸秆过程中刀具楔面受到的正压力;F1、F2为铲断机构刀具铲断过程中需要克服的摩擦阻力。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
[ Ab s t r a c t ]I n o r d e r t o a v o i d r e p e a t e d c u t t i n g a n d c u t t i n g l e a k a g e , a c u t t e r f o r t h i c k s t e m h a r v e s t i n g ma c h i n e w a s d e s i go n L o v o l I n t e na r t i o n l a He a v y I n d u s t r y C o . ,L t d,W e i f a n g Ci t y,S h a n d o n g P r o v i n c e 2 6 1 2 0 6,C h i n a ;
c op r c u t t e r c a n c o mp l e t e r u n n i n g ,c u t t e r r o t a t i n g a n d c u t t i n g .Re p e a t e d c u t t i n g a n d c u t t i n g t e a k a g e p h e n o me n o n i s e f e c t i v e l y a v o i d e d,t h e c u t t e r p a r a me t e s r a r e p r o v i d e d or f d e v e l o p me n t .
[ 摘要 ]为 了解决粗 茎秆作物切割 器的重割、 漏割等 问题 , 设计 了一种在粗 茎秆作物收获机 中使 用的切割器 , 并 通过虚拟样机技术对切割 器进行运动仿真。仿 真结果表明 , 粗 茎秆切 割器能够较好地完成行走、 刀盘旋转和切 割等功能 , 有效地避免 了重割 、 漏割等现象, 为切割器的研制提供参数 依据。 [ 关键词]粗 茎秆作物 ; 切割 器; 运动仿 真 [ 中图分类号 ] ¥ 2 2 5 . 5 [ 文献标 志码 ]A [ 文章编 号]1 6 7 3 — 3 1 4 2 ( 2 0 1 3 ) 0 6 — 0 0 1 7 — 0 4
复 式『 4 1 两种 。 邓 玲 黎等研 制 了圆盘式 玉米 茎秆 切 割
本是粗茎秆作物收获机 中关键的因素之一 。因此 对粗茎秆作物切割器进行 了设计与仿真研究 , 为 粗茎秆作物收获机提供理论依据。
3 . We i c h e n g N a n g u a n S u b d i s t r i c t , We i f a n g C i t y , S h a n d o n g P r o v i n c e 2 6 1 0 0 1 , C h i n a )
[ Ke y w o r d s ] t h i c k s t a l k c r o p s ; c u t t e r ;d e s i g n ; m o t i o n s i mu l a t i o n
0 引言
粗茎秆作物主要包括甘蔗 、 苎麻 、 玉米 、 高粱 、 芦 苇等 【 I 1 。 切 割 器 的结 构 形式 主要 是 圆盘式 [ 2 - 3 1 和 往
t h e mo t i o n o f t h e c u t t e r i s s i mu l a t e d t h r o u g h t h e v i r t u a l p r o t o t y p e t e c h n o l o g y . T h e s i mu l a t i o n r e s u l t s s h o w t h a t ,t he t h i c k s t a l k
De s i g n a n d S i m ̄a i f o n o n Cu t t e r o f Th i c k S t a l k Cr o p
X i e F u x i a n g , Y u Q i n g x i a 2 , Y a n X i a n g g u o 2 , Ma X i u p i n g ( 1 . We i f a n g U n i v e r s i t y , We i f a n g C i t y , S h a n d o n g P r o v i n c e 2 6 1 0 6 1 , C h i n a ;
第5 l 卷 第6 期
V0 l _ 5 l No .6
农业 装 备与 车辆 工程
A G R I C U L T U R A L E Q U I P ME N T&V E H I C L E E N G I N E E R I N G
2 0 1 3年 6月
J u n e 2 0 1 3
d o i : 1 0 . 3 9 6 9 / j . i s s n . 1 6 7 3 — 3 1 4 2 . 2 0 1 3 . 0 6 . 0 0 6
粗 茎秆作物切割器设计与仿真分析
解福祥 , 于庆 霞 , 闫象 国 , 马秀萍
( 1 . 2 6 1 0 6 1山东省 潍坊市 潍坊学院 ; 2 . 2 6 1 2 0 6山东省 潍坊市 福 田雷沃重工股份有 限公司 ; 3 . 2 6 1 0 0 1山东省 潍坊市 潍 城区南关街道办事处 )