光机电一体化设备(DLMCS-675)
仪器科学与技术 光机电一体化-概述说明以及解释

仪器科学与技术光机电一体化-概述说明以及解释1.引言1.1 概述概述光机电一体化是集光学、机械和电子技术于一体的综合性科学与技术领域。
它通过将光学器件、机械结构和电子控制系统相互结合,实现光学信号的发射、传输、接收和处理。
光机电一体化技术的兴起,受益于现代科技的快速发展和多学科交叉的需求,已经在众多领域中得到广泛应用。
在传统的仪器科学中,光学、机械和电子技术往往是独立发展的。
光学技术用于光学器件的设计与制造,机械技术用于仪器的结构和运动控制,电子技术用于信号的处理和控制。
然而,随着科技的进步和发展,单一技术能力已经无法满足现代仪器的需求。
光机电一体化技术的出现,将这三个独立的技术融合在一起,构建了全新的仪器设计和制造模式。
采用光机电一体化技术的仪器具有多重优势。
首先,光学器件、机械结构和电子控制系统的紧密结合,使得仪器的整体性能得到提升。
光学元件的高精度制造和机械结构的精密定位,可以达到更高的测量精度和稳定性。
其次,光机电一体化技术的应用,往往能够实现仪器的小型化和便携化。
光学器件的微型化和电子控制系统的集成,使得仪器更加紧凑,便于携带和使用。
此外,光机电一体化技术还能够提高仪器的自动化程度和智能化水平,提高工作效率和减少人工操作。
光机电一体化技术目前已在多个领域得到广泛应用。
例如,在激光技术领域,光机电一体化系统可以实现激光源的稳定输出和调控,广泛应用于医疗、材料加工、通信等领域。
在光学测量领域,光机电一体化技术提供了更高精度、更快速的光学测量方案。
在生命科学领域,光机电一体化技术的应用可以帮助实现生物分子的探测和分析。
总之,光机电一体化技术的发展,为多个领域带来了新的机遇和挑战。
本文将从光机电一体化的定义和意义、应用领域、发展前景以及面临的挑战和解决方案等方面进行探讨。
通过深入研究光机电一体化技术的应用场景和发展趋势,以期为相关研究和应用提供有价值的参考和思路。
随着科技的不断进步和发展,光机电一体化技术必将在更多领域中发挥重要作用,推动仪器科学与技术的进一步发展。
光机电一体化实训装置操作流程
光机电一体化实训装置操作流程1.打开光机电一体化实训装置的电源开关。
Turn on the power switch of the integrated training device for optoelectronics.2.等待实训装置系统自检完成。
Wait for the training device system self-check to complete.3.选择需要进行实训的光机电一体化实验项目。
Select the optical-electrical integration experiment project for training.4.准备相关的光学元件和电子元件。
Prepare the relevant optical and electronic components.5.将光学元件安装到实训装置的光路系统中。
Install the optical components into the optical path system of the training device.6.连接电子元件到实训装置的电路系统中。
Connect the electronic components to the circuit system of the training device.7.调整光学元件的位置和角度。
Adjust the position and angle of the optical components.8.检查电子元件的连接是否正确。
Check if the electronic components are connected correctly.9.打开实训装置的控制软件。
Open the control software of the training device.10.设置实验参数和目标数值。
Set the experimental parameters and target values.11.开始运行光机电一体化实验项目。
光机电一体化

肝脏组织。
3D打印技术的前景
一本名为《经济学人》的杂志曾经将这种技术 列入第三次技术范围。“伟大发明所能带来的 影响,在当时那个年代都是难以预测的, 1750年的蒸汽机如此,1450年的印刷术如此, 1950年的晶体管也是如此。而今,我们仍然 无法预测,3D打印将在漫长的时光里如何改 变这个世界。”
光机电一体化产品的组成
光机电一体化产品的组成包括4个部分,本体 结构、传感器、控制器、驱动装置。
如果把光机电一体化产品比做一个人,则计 算机就是它的头脑,传感器就是它的五官, 软件就是使躯体(机械本体)能发挥效能的 手段,所以,光机电一体化产品就是具有头 脑和五官,能够感知外界环境的变化,并根 据这种变化作出响应的机器或机构。
柔性化,智能化
光机电一体化技术使得电子装置能按照人的意 图进行自动控制、自动检测、信息采集及处理、 调节、修正、补偿、自诊断、自动保护直至自 动记录、显示、打印工作结果。通过改变程序、 指令等软件内容而无需改动硬件部分就可变换 产品的功能,使机械控制功能内容的确定和变 化趋向“软件化” 和“智能化”。
3D打印简史
1986年,Charles Hull开发了第一台商业3D印刷机。 1993年,麻省理工学院获3D印刷技术专利。 2019年,美国ZCorp公司从麻省理工学院获得唯一授权并开始开发3D打
印机。 2019年,市场上首个高清晰彩色3D打印机Spectrum Z510由ZCorp公司
研制成功。 2019年11月,世界上第一辆由3D打印机打印而成的汽车Urbee问世。 2019年6月6日,发布了全球第一款3D打印的比基尼。 2019年7月,英国研究人员开发出世界上第一台3D巧克力打印机。 2019年8月,南安普敦大学的工程师们开发出世界上第一架3D打印的飞
最新光机电一体化

光机电一体化探析光机电一体化技术的发展现状及热点姓名:摘要:简述了光机电一体化产品的组成和特点,综述了国内外光机电一体化技术的发展现状,分析了光机电一体化技术的未来发展热点。
关键词:光机电一体化技术组成特点发展现状发展热点一.引言光机电一体化技术的概念萌芽可追溯到德国提出的精密工程技术,是在现代光学技术与机电一体化技术基础上发展起来的一门新兴交叉学科,是综合当前光学、机械学、电子学、信息处理与控制等领域中最新技术的一种群体技术,是诸多高新技术产业和高新技术装备的基础。
其技术水平直接反映了一个国家现代科技和现代工业的发展水平,也是国家综合实力的重要体现。
二.光机电一体化产品的组成光机电一体化产品一般由机械本体、传感器、接口、微处理器和执行机构等5部分组成。
如果把光机电一体化产品比做一个人,则计算机就是它的头脑,传感器就是它的五官,软件就是使躯体(机械本体)能发挥效能的手段,所以,光机电一体化产品就是具有头脑和五官,能够感知外界环境的变化,并根据这种变化作出响应的机器或机构。
三.光机电一体化产品的特点3.1体积小,易操作光机电一体化技术通过采用电力电子器件或用电子装置进行相关动作控制,使得产品机械结构大大简化。
可以灵活方便地按需控制和改变生产操作程序,任何装置的动作可由预设的程序一步一步控制实现,甚至实现操作全自动化和智能化。
3.2反应快,精度高电子技术的采用使得反馈控制水平提高,运算速度加快,通过电子自动控制系统可精确按预设动作,其自行诊断、校正、补偿功能可减少误差,达到靠单纯机械方式所不能实现的工作精度。
同时,由于机械传动部件减少,机械磨损及配合间隙等引起的误差也大大减小。
因此,光机电一体化产品应用领域宽,适用面广,易于满足各种需要。
3.3柔性化,智能化光机电一体化技术使得电子装置能按照人的意图进行自动控制、自动检测、信息采集及处理、调节、修正、补偿、自诊断、自动保护直至自动记录、显示、打印工作结果。
光机电一体化课件

国外的发展状况
美国、德国、日本等工业发达国家相继将光机电一体化列为国家 高技术重点发展目标,目前工业发达国家光机电一体化的应用已 十分广泛。从国外发达国家光机电一体化产业的发展来看,出现 了以下发展趋势: (1)技术发展迅速:光电子技术、数控技术与传统制造业进一 步融合,已成为带动整个制造业发展的动力和源泉。 (2)市场不断拓展:产品由单纯的装备类向装备类、消费类并 举的方向发展,与人民生活不断靠近,且呈现高速度、多领域的 发展态势。 (3)产业相互融合:结构不断调整,行业不断融合,涌现了一 批新的产业领域和经济增长点。
光机电一体化的基本概念
光机电一体化技术的概念萌芽可追溯到德国提 出的精密工程技术 ,精密工程技术定义为光、 机、电一体化的综合。
精密工程技术一定程度上说明了光机电一体化 的含义。
光机电一体化
一般认为,光机电一体化技术是在现代光学技术与机 电一体化技术基础上发展起来的一门新兴交叉学科, 是综合当前光学、机械学、电子学、信息处理与控制 等领域中最新技术的一种群体技术。
肝脏组织。
光机电一体化
3D打印技术的前景
一本名为《经济学人》的杂志曾经将这种技术 列入第三次技术范围。“伟大发明所能带来的 影响,在当时那个年代都是难以预测的, 1750年的蒸汽机如此,1450年的印刷术如此, 1950年的晶体管也是如此。而今,我们仍然 无法预测,3D打印将在漫长的时光里如何改 变这个世界。”
3D打印技术实际上是一系列快速原型成型技术的统 称,其基本原理都是叠层制造,由快速原型机在X-Y 平面内通过扫描形成工件的截面形状,而在Z坐标间 断地作层面厚度的位移,最终形成三维制件。目前市 场上的快速成型技术分为3DP 技术、FDM熔融层积成 型技术、SLA立体平版印刷技术、SLS选区激光烧结、 DLP激光成型技术和UV紫外线成型技术等。
OME光机电一体化

OME光机电一体化是多学科领域综合交叉的技术密集型系统工程,包含了机械技术、计算机与信息处理技术、系统技术、自动控制技术、传感与检测技术、伺服传动技术和光电技术。
光机电一体化是传统工业被微电子技术逐步渗透过程形成的一个新概念,是微电子技术、机械技术相互交融的产物,是集多种技术于一体的新兴交叉学科。
光机电一体化的发展和进步有赖于相关技术发展和进步,其主要发展方向有数字化、智能化、模块化、网络化、人性化、微型化、集成化、带源化和绿色化。
数字化的实现便于远程操作、诊断和修复,产品的虚拟设计与制造将大大提高设计制造的效率,节省开发费用。
赋予光机电产品一定的智能,使它具有人的判断推理、逻辑思考、自主决策能力。
例如在CNC数控机床上增加了人机对话功能,设置了智能I/O通道和智能工艺数据库,给使用、操作和维护带来了极大的方便。
人工智能技术、神经网络技术及光纤技术等领域取得的巨大进步,为光机电一体化技术开辟了发展的广阔天地。
大量的智能化光机电一体化产品不断涌现。
现在,“模糊控制”技术已经相当普遍,甚至还出现了“混沌”控制的产品。
研制和开发具有标准机械接口、动力接口、环境接口的光机电一体化产品单元是一项复杂和有前途的事情。
如研制具有集减速、智能调速、电机于一体的动力装置单元,具有视觉、图像处理、识别和测距等功能的控制单元,以及能完成典型操作的装置。
利用标准单元迅速开发出新的产品,也可扩大生产规模。
这需要制定各项标准,以便各部件、单元的匹配和链接。
光机电一体化产品模块化的发展促进了新产品的开发,品种不断增多,花样不断翻新,缩短了开发周期。
以驱动为核心的驱动模块单元,以伺服为核心的运动控制模块单元,以两根导线把各功能单元连接起来的总线或现场总线等,已形成了标准化的产品。
目前在世界范围内研制的微光机电系统主要包括空间光调制器、光盘读取头、微机械光开关、光衰减器、光扫描器以及光谱仪等。
其中微机械光开关具有串话小、插入损耗小、消光比高、对波长和偏振不敏感、稳定性好、造价低等优点,在光纤通信和光纤测试系统中具有广阔的应用前景。
光机电一体化简介

光机电一体化的应用与构成
精密激光切割机是利用激光技术和数控技术设计而成的一种切 割和打孔专用设备,具有激光功率稳定,光束模式好,峰值功 率高,高效率、低成本、安全、稳定、操作简便等特点。 整机由精密切割激光器、精密激光切割头、激光电源、冷却系 统、激光指示定位系统、导光系统、CNC控制系统、气体控 制系统、精密二维工作台、同轴监视系统等组成。适用于金属 或非金属板材、管材进行非接触切割打孔,特别适合不锈钢板, 铁板,硅片,陶瓷片,金刚石等材料的切割打孔。 广泛应用于机床、交通运输机械、冶金机械、电子、电器业、 电机制造业、汽车制造业、通讯、广播及信息业、航空、航天 工业、石油、化工工业、石材、塑料及橡胶制品等行业。
光机电一体化的发展
光机电一体化的发展
• 光机电一体化的发展方向
光机电一体化是机械、微电子、光 光机电一体化是机械、微电子、 学、控制、计算机、信息处理等多 控制、计算机、 学科的交叉融合,其发展和进步有 学科的交叉融合, 赖于相关技术发展和进步,其主要 赖于相关技术发展和进步, 发展方向有数字化、智能化、模块 发展方向有数字化、智能化、 化、网络化、人格化、微型化、集 网络化、人格化、微型化、 成化、带源化和绿色化。 成化、带源化和绿色化。
动力
传感器
计算机
执行机构
人机交流
光机电一体化的应用与构成
光机电一体化的运用
1 光机电一体化在设计中的运用 (1)信息处理技术 ) (2)传感器检测技术 ) (3)设计步骤 ) 2 光机电一体化在制造中的运用 (1)传感器检测技术 ) (2)激光加工技术 ) ①激光加工 ②金属表面的激光强化 ③激光快速成型 ④激光金属塑性成形
光机电一体化的发展
• 美国政府已将光子学定为国家发展的重点,认为光子学对 国家安全与经济竞争有这深远的意义和潜力,并把光子学 列为当前20项关键技术之一。为此,美国已建立了若干个 光子学技术中心。德国政府已确定光子学是在21世界初对 保持德国在国家市场上先进地位至关重要的九大关键技术 之一。澳大利亚集中了10个重要单位的力量成立了光子联 合研究中心,重点开拓信息技术和新产品。光电子产业是 21世纪市场潜力巨大,产值迅猛增长的高新技术支柱产业。 例如,光电子产业在全世界的产值:2007年世界光电子 产业总值达3150亿美元,据美国光电子产业振兴协会的 报告预测,2010年全球光电子产业总值将达到4500亿美 元。
光机电一体化技术及其应用

光机电一体化技术及其应用学部:班级:姓名:学号:一.引言光机电一体化技术是诸多高新技术产业和技术装备的基础,同时也是微电子技术、控制技术、计算机技术、光学技术与机械技术等领域的相互交叉与融合的产物。
光机电一体化技术及其应用培养具备机械设计基础知识与应用能力,能在工业生产第一线从事机械制造领域内的设计制造、应用研究、运行管理和经营销售等方面工作的应用型高级工程技术人才。
它包括产品和技术两方面:光机电一体化产品是集光学、机械、微电子、自动控制和通信技术于一体的高科技产品,具有很高功能和附加值;光机电一体化技术是指其技术原理和使光机电一体化产品得以实现,使用和发展的技术。
二.光机电一体化产品--光标阅读器1.光标阅读器产生的背景现在,由于计算机处理速度,效率,可靠性飞速提高。
然而计算机处理数据却往往是从高速收集原始数据开始,这就需要找出一个能与之相适应数据收集和输入系统,即解决数据进入计算机的"瓶颈"问题。
而光标阅读器就是解决上述问题的途径之一,它作为一种光机电一体化高速数据录入设备,具有高速、高效和准确等特点。
2.工作原理光标阅读器利用光电传感器高速采集信息卡上的涂写信号的有无,根据光电变换原理,把光信号转换为电信号,由处理器对信号进行判断处理和识别。
它可识别人们在信息卡上限定位置的涂写状态,用有和无两种状态来确定该位置是被涂写还是未被涂写。
光标阅读器涉及光学原理、计算机技术、光电转换、数据处理和识别、精密机械等方面,其结构主要由机械传动,光电传感器、微处理器、控制面板以及处理,控制、识别软件等部分组成。
3.组成部分分析(1)光电传感器光电传感器由发光管(LED)和光敏管(PT)组成。
发光管是光源,常用半导体红外管,它体积与晶体灯相似。
当加上电压时,就从一端的窗口发出光线。
光敏管是接收红外光的器件,外形与发光管类似,当加上电压并有光照射到窗口时,电路中电流就发生变化,电流大小随照射光的强弱而变化。
如何理解光机电一体化

如何理解光机电一体化S100300366刘博机械制造及自动化提纲*1光机电一体化的内涵*2光机电一体化中的关键技术-3光机电一体化的测试阶段-4五大元素和四大原则-5国外研究现状及发展趋势-6国内研究现状及发展趋势-7我对光机电一体化技术的理解1光机电一体化的内涵.光机电一体化的含义[1]光机电一体化技术是由机械技术与激光-微电子等技术揉合融汇在一起的新兴技术。
光机电一体化是一个总的技术指导思想,它不仅体现在一些机电一体化的单机产品之中,而且贯穿于工程系统设计之中。
从简单的单台光机电一体化产品,到现代工业中的柔性加工系统;从简单的单参数显示,到复杂的多参数、多级控制;从机械零部件连续自动热处理生产线,到各种现代高速重型机械自动化生产线等,光机电一体化技术都有不同层次、覆盖面很广的应用领域。
对于工程系统,需成套地进行开发和制造。
对于光机电一体化单机产品(设备),应采用简繁并举、高低级并存的多层次发展途径。
可发展功能附加型的低级产品;也可发展功能替代型的中级产品;还可发展机电融合型的高级产品,成为前所未有的新一代产品。
2光机电一体化的关键技术光机电一体化的关键技术分为6个组成部分:分别是机械技术,计算机与信息技术,系统技术,自动控制技术,传感检测技术,伺服传动技术[2]。
伺服传动技术包括电动、气动、液压等各种类型的传动装置,伺服系统是实现电信号到机械动作的转换装置与部件、对系统的动态性能、控制质量和功能有决定性的影响。
传感检测技术传感检测技术是系统的感受器官,是实现自动控制、自动调节的关键环节。
其功能越强,系统的自动化程序就越高。
现代工程要求传感器能快速、精确地获取信息并能经受严酷环境的考验,它是机电一体化系统达到高水平的保证。
机械技术机械技术是机电一体化的基础,机械技术的着眼点在于如何与机电一体化技术相适应,利用其它高、新技术来更新概念,实现结构上、材料上、性能上的变更,满足减小重量、缩小体积、提高精度、提高刚度及改善性能的要求。
光机电一体化实训系统技术方案(纯方案,6页)
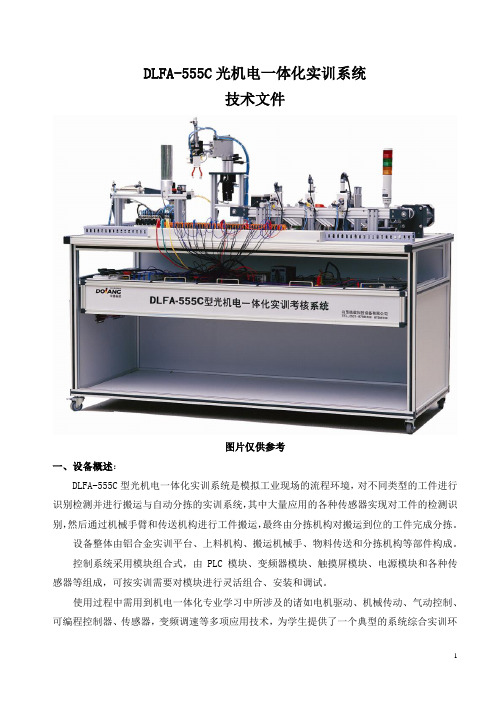
DLFA-555C光机电一体化实训系统技术文件图片仅供参考一、设备概述:DLFA-555C型光机电一体化实训系统是模拟工业现场的流程环境,对不同类型的工件进行识别检测并进行搬运与自动分拣的实训系统,其中大量应用的各种传感器实现对工件的检测识别,然后通过机械手臂和传送机构进行工件搬运,最终由分拣机构对搬运到位的工件完成分拣。
设备整体由铝合金实训平台、上料机构、搬运机械手、物料传送和分拣机构等部件构成。
控制系统采用模块组合式,由PLC模块、变频器模块、触摸屏模块、电源模块和各种传感器等组成,可按实训需要对模块进行灵活组合、安装和调试。
使用过程中需用到机电一体化专业学习中所涉及的诸如电机驱动、机械传动、气动控制、可编程控制器、传感器,变频调速等多项应用技术,为学生提供了一个典型的系统综合实训环境,使学生掌握的各项专业知识得到全面、综合地加深巩固并灵活应用。
DLFA-555C型光机电一体化实训考核系统用于教学,可按工作过程导向,工学结合的模式规划教学活动,完成以下工作任务:1. 气动系统的安装与调试项目:选用该系统配置的单出杆气缸、单出双杆气缸、旋转气缸等气动执行元件和单控电磁换向阀、双控电磁换向阀和磁性开关等气动控制元件,可完成下列气动技术的工作任务:★气动方向控制回路的安装;★气动速度控制回路的安装;★摆动控制回路的安装;★气动顺序控制回路的安装;★气动机械手系统的安装;★气动系统安装与调试;2. 电气控制电路的安装和PLC程序编写项目:选用该系统配置的PLC模块、变频器模块和指令开关、传感器等,可完成下列PLC应用技术工作任务:★电动机正反转控制电路的连接与控制程序编写;★电动机调速控制电路的连接与控制程序编写;★气动方向控制程序编写;★气动顺序动作控制程序编写;★气动机械手控制程序编写;★皮带输送机控制程序编写;★机电一体化设备控制程序编写;★自动生产线控制程序编写。
3. 机电设备安装与调试项目选用该系统配置的机电一体化设备部件、PLC模块、变频器模块和指令开关、传感器等,可完成下列机电设备安装和机电一体化技术的工作任务:★传动系统同轴度的调整;★皮带输送机的安装与调整;★搬运机械手设备安装与调试;★物件分拣设备的安装与调试;★送料设备的安装与调试;★自动生产线设备安装与调试。
光机电一体化实训考核系统技术方案(纯方案,9页)
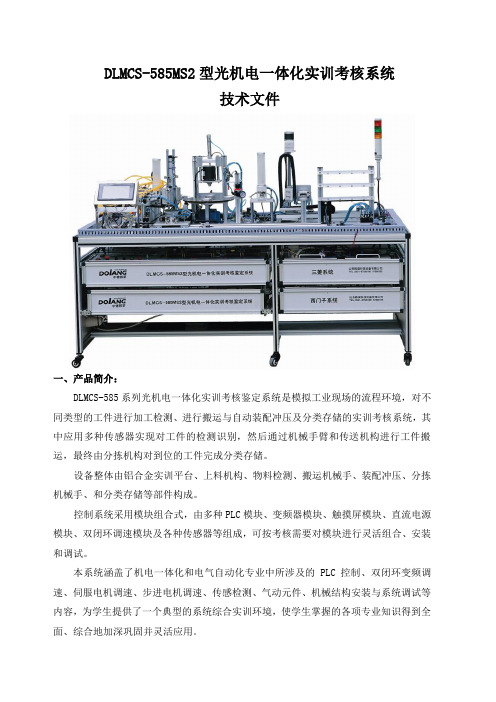
DLMCS-585MS2型光机电一体化实训考核系统技术文件一、产品简介:DLMCS-585系列光机电一体化实训考核鉴定系统是模拟工业现场的流程环境,对不同类型的工件进行加工检测、进行搬运与自动装配冲压及分类存储的实训考核系统,其中应用多种传感器实现对工件的检测识别,然后通过机械手臂和传送机构进行工件搬运,最终由分拣机构对到位的工件完成分类存储。
设备整体由铝合金实训平台、上料机构、物料检测、搬运机械手、装配冲压、分拣机械手、和分类存储等部件构成。
控制系统采用模块组合式,由多种PLC模块、变频器模块、触摸屏模块、直流电源模块、双闭环调速模块及各种传感器等组成,可按考核需要对模块进行灵活组合、安装和调试。
本系统涵盖了机电一体化和电气自动化专业中所涉及的 PLC 控制、双闭环变频调速、伺服电机调速、步进电机调速、传感检测、气动元件、机械结构安装与系统调试等内容,为学生提供了一个典型的系统综合实训环境,使学生掌握的各项专业知识得到全面、综合地加深巩固并灵活应用。
图系统模块示意图二、产品特点:1、该实训考核系统融典型机电一体化设备机械部件安装、气动系统的安装与调试、电气控制电路的安装、PLC 编程、机电设备安装与调试、自动控制系统安装与调试于一体,满足实训教学和竞赛的需要。
2、该实训考核系统采用控制单元模块化,执行单元模块化。
控制模块为三菱PLC 模块/西门子PLC模块、三菱变频器模块/西门子变频器模块、双闭环调速模块、伺服驱动及伺服电机模块、步进驱动及步进电机模块等模块;被控对象为送料单元模块、加工检测单元模块、搬运单元模块、装配单元模块、分类存储单元模块。
3、可自由组合系统控制及被控对象模块,完成简单或复杂的实训考核内容。
4、增加双闭环调速模块供拖动直流电机调速用,也可作为可调直流电源使用。
三、技术性能:1、交流电源:三相五线 AC380V±10% 50Hz;2、温度:-10℃~40℃;环境湿度:≤90%(25℃);3、外形尺寸:约1900mm×900mm×1220mm(长×宽×高)4、整机容量:≤5KVA四、系统基本配置:该系统配置了可编程控制器(PLC)、变频器系统、气动系统、传感器、机械手、送料器、存储货架系统等实训部件。
光机电一体化技术与应用
光机电一体化技术与应用前言:光机电一体化是在激光技术与微型计算机为代表的微电子技术迅发展,向机电工业领域迅猛渗透,与机电技术深度结合的现代工业的基础上,综合应用机械技术,微电子技术,信息技术,自动控制技术,传感控制技术,电力电子技术,接口技术及软件编程技术等群体技术,从系统的观点出发,根据系统功能部件和优化组织结构部件,以智能,动力,结构,运动和感知组成要素为基础,在高功能,高质量、高精度、高可靠性、低能耗意义上实现多种技术功能复合的系统工程技术。
光机电一体化技术是指其技术原理和使光机电一体化产品得以实现、使用和发展的技术。
激光以其特有的单色性、方向性及相干性,在军事上得到了日益广泛的应用,如用于激光测距、激光雷达、激光制导、激光武器和激光对抗等领域。
激光在经济方面的意义主要在于其使用的广泛性,从短期和中期的观点来看,就市场应用中的重要作用,激光系统总的世界市场划分为例,二极管激光器、二极管泵浦固体激在许多应用领域,激光器应用系统成为市场竞争力的一个主要手段。
1光机电一体化技术的发展1.1 激光的原理早在1916年已被著名的美国物理学家爱因斯坦发现,1958 年,美国科学家肖洛和汤斯发现了一种神奇的现象:当他们将氖光灯泡所发射的光在一种稀土晶体上时,晶体的分子会发出鲜艳的、始终会聚在一起的强光。
根据这一现象提出了,“激光原理”自从1960年美国修斯公司实验室一位从事红宝石荧光研究的年轻人梅曼用红宝石棒首次观测出激光,之后制造出第一台激光器以后,激光作为一门新颖科学技术发展极快。
苏联科学家尼古拉·巴索夫于1960年发明了半导体激光器。
半导体激经过无十多年的发展,人们对激光并不陌生,如激光开到可自动止血,激光灯、激光打印、激光美容等。
1.2 人们生活在高度现代化的今天.光机电一体化技术得到迅猛发展,在民用工业和军事领域得到广泛地应用,光机电技术在现代化水利建设中也得到了充分的应用。
据美国高级军事专家调查,以光机电一体化技术为支撑的高技术武器系统,2光机电一体化的应用2.1我是一名材料类专业的学生,所以在此我来介绍光机电一体化在材料方面的应用。
THJDME型光机电一体化实训考核装置指导书新版
目录第一章 THJDME-1型光机电一体化实训考核装置 (2)一、外观 (2)二、概述 (2)三、特点 (2)四、技术参数 (3)五、系统组成 (3)六、实训项目 (3)七、注意事项 (4)第二章 THJDME-1型光机电一体化实训考核装置机构说明 (5)一、整机工作流程 (5)二、工作原理 (5)三、送料机构 (6)四、机械手搬运机构 (7)五、物料传送和分拣机构 (8)六、气动原理 (9)七、气缸、气爪、电控阀使用 (9)第三章 THJDME-1型光机电一体化实训考核装置电气控制说明 (12)一、电气电路组成 (12)二、模块说明及示意图 (12)三、端子接线图 (13)四、变频器的基本使用 (14)五、系统控制实训 (19)六、三菱PLC控制原理图 (22)七、西门子PLC控制原理图 (23)八、欧姆龙PLC控制原理图 (24)附录一:THJDME-1型光机电一体化实训考核装置元件接线图 (25)附录二:THJDME-1型光机电一体化实训考核装置装配图 (26)第一章 THJDME-1型光机电一体化实训考核装置一、外观二、概述本实训装置是针对机电一体化实训考核教学的要求而研发的;它集PLC控制、变频调速控制、机械手控制、位置检测与控制、物料输送及分拣控制于一体的实训考核装置..通过传感器信号采集;PLC编程;对电磁阀、直流电机、交流电机等进行复杂的开关量控制、位置控制及时序逻辑控制;实现物料提升、故障报警、气动机械手搬运、皮带机输送、物料分拣等功能..该实训考核装置适合于机械制造及自动化、机电一体化、自动化、电气工程等专业的机电设备安装与调试、可编程控制技术、电气控制技术、自动控制技术、机电传动与控制、机电一体化技术、计算机控制技术、检测与转换技术等课程的专业知识模块的单项实训项目的教学;同时可进行机电一体化设备、气动系统、自动控制系统的综合技能训练..三、特点1.光机电一体化实训考核装置由型材实训台、物料提升机构、气动机械手、物料输送及分拣机构、PLC模块、变频器模块、按钮模块、电源模块、各种传感器和I/O接口板等组成..整体结构采用开放式和拆装式设计;学生可以自由组装和调试送料检测机构、物料搬运机构、物料分拣机构和自动生产线等机电一体化实训设备..2.该装置融机械结构组装、气动应用、电气控制、电机控制、传感检测、可编程控制技术于一体;综合性强..3.PLC模块、变频器模块、按钮模块、常用装置模块等可任意调换和组合;进行机电设备安装与调试、PLC控制程序的编写与运行、变频器调速系统的组装与调试、PLC控制系统的安装与调试、光机电一体化设备的组装与调试等专业知识与技能的实训教学..4.该实训考核装置PLC模块的I/O 端子、变频器的接线端子、各常用模块与PLC的连接端子;均与安全插座连接;使用带安全插头的导线进行电路连接;各指令开关、光电开关、传感器和指示元件的电路;则通过端子排进行连接..插拔线连接电路与端子排连接电路相结合;既保证学生基本技能的训练、形成和巩固;又保证电路连接的快速、安全可靠..四、技术参数1.输入电源:三相四线或三相五线~380V±10% 50Hz2.工作环境:温度-10℃~40℃相对湿度≤85%25℃海拔<4000m3.装置容量:≤1.0kVA4.外形尺寸:120cm×72cm×120cm5.安全保护:具有漏电压、漏电流保护;安全符合国家标准五、系统组成1.光机电一体化实训考核装置由型材实训台、物料提升机构、气动机械手、物料输送及分拣机构、PLC模块、变频器模块、按钮模块、电源模块、各种传感器、物料、I/O接口板和气管等组成..2.电源模块由三相电源总开关带漏电和短路保护、熔断器、单相电源输出、三相电源输出、电源插座、开关电源提供DC24V等组成..3.按钮模块由急停按钮、转换开关、复位按钮、自锁按钮、指示灯等组成..4.变频器模块由欧姆龙3G3JV-AB004变频器及接线柱组成..5.PLC模块可选用西门子或三菱或欧姆龙系列的可编程控制器;其中西门子主机为CPU224AC/DC/RLY 内置数字量I/O14路数字量输入/10路数字量输出+数字量扩展模块EM2238路数字量输入/8路数字量输出;三菱主机为FX1N-40MR-001 内置开关量I/O24路开关量输入/16路继电器输出;欧姆龙主机CPM2AH-40CDR-A 内置开关量I/O24路开关量输入/16路继电器输出;机箱内装有24V/5A的开关电源为系统提供直流电源..6.物料提升机构由单出杆气缸、电磁阀、磁性开关、警示灯、直流减速电机、机械结构件等组成..7.气动机械手机构由单出杆气缸、双出杆气缸、旋转气缸、气爪、磁性开关、缓冲阀、电磁阀、机械结构件等组成..8.物料输送及分拣机构由三相交流电机、皮带、单出杆气缸、磁性开关、电磁阀、电感式传感器、电容式传感器、光电传感器、机械结构件等组成..六、实训项目1.气动技术应用实训气动方向控制回路、摆动控制回路、气动系统安装与调试等2.自动检测技术使用实训光电传感器的应用、电容传感器的应用等3.可编程控制器编程实训PLC基本指令应用、PLC功能指令的应用等4.变频器应用实训变频器参数设置、变频运行操作等5.电气与PLC技术应用实训电动机起停控制、电动机调速控制、皮带输送机控制等6.自动控制技术教学与实训工作流程控制等7.机电一体化及电气设备安装技术应用实训接近开关应用、传动装置同轴度的调整、传感器安装与位置调整、上料装置的安装与调试、皮带输送机的安装与调整、物件分拣设备的安装与调试、机械手的自动控制、皮带输送机的自动控制、自动生产线的安装与调试、机电一体化设备的自动控制等8.系统维护与故障检测实训七、注意事项1.使用时先将气泵打开;运行一段时间后自动关闭..将实训平台上的导气管接入气泵中..2.本实训平台PLC单元带有DC24V直流电源输出端子;上电后检查电源输出是否正常..3.将三相交流电源通过三相电源线连到模型上;打开空气开关;即可给模型电源模块上电..4.接线完毕;检查无误后;才可通电;严禁带电插拔..5.实训始终;模型上要保持整洁;不可随意放置杂物;特别是导电的工具和多余的导线等;以免发生短路等故障..6.实训完毕;应及时关闭电源开关;并及时清理实训台面;整理好连接导线并放置规定的位置..7.若发生不能上电;请检查电源模块上保险丝是否完好..8.若不能排除故障请联系售后服务;在无把握时请勿随意改动模型结构..第二章 THJDME-1型 光机电一体化实训考核装置机构说明一、 整机工作流程有手机械手臂旋转和机械手放物料机械手抓料二、 工作原理按下启动按扭SB1后;系统正常标志绿色指示灯亮;PLC 启动送料电机驱动放料盘旋转;物料由送料槽滑到物料提升位置;物料检测光电传感器开始检测;如果送料电机运行4秒钟后;物料检测光电传感器仍未检测到物料;则说明送料机构已经无物料;这时停机并报警;同时红色指示灯亮..当物料检测光电传感器检测到有物料;将给PLC 发出信号;由PLC 驱动上料单向电磁阀上料;机械手臂伸出手爪下降抓物料;然后手爪提升臂缩回;手臂向右旋转到右限位;手爪下降将物料放到传送带上;传送带输送物料;传感器则根据物料性质金属和非金属;分别由PLC 控制相应电磁阀使气缸动作;对物料进行分拣..最后机械手返回原位重新开始下一个流程..按下停止按钮SB2;系统停止;绿色指示灯灭;上料单元及机械手立即复位;传送带传送完最后一个物料后停止..三、送料机构物料滑槽放料转盘提升气缸驱动电机磁性传感器物料检测传感器提升台1.放料转盘:转盘中共放两种物料;一种金属物料、一种非金属物料..2.驱动电机:电机采用24V直流减速电机;转速10r/min;转矩30kg/cm;用于驱动放料转盘旋转..3.物料滑槽:放料转盘旋转;物料互相推挤趋向入料口;物料则从入料口顺着滑槽落到提升台上..4.提升台:将物料和滑槽有效分离;并确保每次只提升一个物料..5.物料检测传感器:物料检测为光电漫反射型传感器;主要为PLC提供一个输入信号;如果有物料在提升台上;就会驱动提升气缸提升物料;如果运行中;光电传感器没有检测到物料并保持4秒钟;则让系统停机然后报警..6.磁性传感器:用于气缸的位置检测..检测气缸伸出和缩回是否到位;为此在前点和后点上各一个;当检测到气缸准确到位后将给 PLC发出一个信号..磁性传感器接线时注意..蓝色接GND;棕色经过负载接PLC输入端..棕色接“+”;蓝色接“-”..7.提升气缸:提升气缸使用的是单向电控气阀..当电控气阀得电;物料提升台上升;当电控气阀断电;则物料提升台下降..四、 机械手搬运机构1.整个搬运机构能完成四个自由度动作;手臂伸缩、手臂旋转、手爪上 下、手爪紧松..2.手爪提升气缸:提升气缸采用双向电控气阀控制;气缸伸出或缩回可任意定位..3.磁性传感器:检测手爪提升气缸处于伸出或缩回位置..接线注意棕色接“+”、蓝色接“-”..4.手爪:抓取物料由单向电控气阀控制;当单向电控气阀得电;手爪夹紧磁性传感器有信号输出;指示灯亮;单控气阀断电;手爪松开..5.旋转气缸:机械手臂的正反转;由双向电控气阀控制..6.接近传感器:机械手臂正转和反转到位后;接近传感器信号输出..接线注意棕色接“+”、蓝色接“-”、黑色接输出..7.双杆气缸:机械手臂伸出、缩回;由双向电控气阀控制..气缸上有装有两个磁性传感器;检测气缸伸出或缩回位置.. 接线注意棕色接“+”、蓝色接“-”..8.调速阀:调节旋转气缸的转动速度和力度;同时也可调节提升气缸的伸缩速度和力度.. 9.缓冲器:旋转气缸高速正转和反转到位时;起缓冲速作用..双杆气缸磁性传感器接近传感器缓冲器手爪提升气缸磁性传感器手爪旋转气缸安装支架调速阀五、 物料传送和分拣机构1.落料光电传感器:检测是否有物料到传送带上;并给PLC 一个输入信号..接线注意棕色接“+”、蓝色接“-”、黑色接输出..2.落料口:物料落料位置定位..3.金属料槽:放置金属物料..4.塑料料槽:放置非金属物料..5.电感式传感器:检测金属材料;检测距离为2~5mm 接线注意接“+”、蓝色接“-”、黑色接输出棕色..6.电容式传感器:用于检测非金属材料;检测距离为3~8mm 接线注意接“+”、蓝色接“-”、黑色接输出棕色..7.三相低速电动机:驱动传送带转动;由变频器控制.. 8.推料气缸:将物料推入料槽;由单向电控气阀控制..电容式传感器 电感式传感器传送带三相低速电动机塑料料槽金属料槽落料口 推料一气缸 推料二气缸支架 落料光电传感器六、 气动原理本装置气动主要分为两部分:1.气动执行元件部分有单出杆气缸、单出双杠气缸、旋转气缸..2.气动控制元件部分包括单控电磁换向阀、双控电磁换向阀、磁性限位传感器..七、 气缸、气爪、电控阀使用1.气缸示意图注:气缸的正确运动使物料到达相应的位置;只要交换进出气的方向就能改变气缸的伸出缩回运动;气缸两侧的磁性开关可以识别气缸是否已经运动到位..2.双向电磁阀示意图接气管气缸缩回限位 气缸伸出限位棕色“+”;蓝色“—”调速阀注:双向电控阀用来控制气缸进气和出气;从而实现气缸的伸出、缩回运动.. 3.单向电磁阀示意图单向电磁阀示意图注:单向电控阀用来控制气缸单向运动;实现气缸的伸出、缩回运动..与双向电控阀区别在双向电控阀初始位置是任意的可以控制两个位置;而单控初始位置是固定的只能控制一个方向..气动接头气动接头驱动线圈驱动线圈驱动线圈4.气动手爪控制示意图:注:上图中手爪夹紧由单向电控气阀控制;当电控气阀得电;手夹紧.当电控气阀断电后;手爪张开..第三章 THJDME-1型光机电一体化实训考核装置电气控制说明一、电气电路组成本装置电气部分主要有电源模块、按钮模块、可编程控制器模块、变频器模块、三相减速电动机、接线端子排等组成..所有的电气元件均连接到接线端子排上;通过接线端子排连接到安全插孔;由安全接插控连接到各个模块;提高实训考核装置的安全性..二、模块说明及示意图1.公用模块电源模块:三相电源总开关带漏电和短路保护、保险丝..单相电源插座用于给外部设备供电;模块之间电源采用安全导线连接..按钮模块:提供多种不同功能的按钮和指示灯DC24V..变频器模块:欧姆龙3G3JV-AB004控制传送带电机转动..所有功能端全部引出..2.可选模块PLC模块:1三菱主机为FX1N-40MR-001内置开关量I/O24路开关量输入/16路继电器输出;2西门子主机为CPU224AC/DC/RLY内置数字量I/O14路数字量输入/10路数字量输出+数字量扩展模块EM2238路数字量输入/8路数字量输出;3欧姆龙主机CPM2AH-40CDR-A 内置开关量I/O24路开关量输入/16路继电器输出;机箱内装有24V/5A的开关电源为系统提供直流24V电源..三、端子接线图四、变频器的基本使用1、实训目的通过完成变频器使用实训;掌握3G3JV系列变频器的参数设置和使用方法..2、实训内容1.参数设置2.端子排控制电机运行3、实训步骤3.1系统上电3.1.1把220V电源线接到变频器电源插座上..3.1.2 将电源开关打开;变频器上电..3.2 变频器使用3.2.1设置变频器为端子排操作模式;检测电机运行状态..根据以上设置步骤;设置下列参数a恢复变频器为工厂设置值..n01=8 恢复到出厂设定n32=0.1 电机额定电流b V/F 模式设定n10=255 最大电压n11=50.0 最大电压频率n13=220 中间输出频率电压n14=0.0 最低输出频率n15=1 最低输出频率电压c V/F 运转指令选择n02=1 控制电路的端口区控制有效n05=1 控制电路的端口区控制n06=1 控制台的STOP/RESET键无效n16=1.0 加速时间n17=1.0 减速时间n21=50.0 运行频率以上各参数的详细含义请查看光盘中PDF文档说明完成设置后按“确定”键;使“FREF”灯点亮..3.3连接导线3.3.1根据下表所示;连接实训导线..3.3.2导线连接完成后;按下“S1”自锁按钮;变频器启动;以n1.07设置的频率百分比运行;调节变频器旋钮可调整输出频率..4.变频器端子功能表5.变频器标准接线图五、系统控制实训1、实训目的通过完成综合控制实训;掌握顺序控制、左移指令的综合运用..2、实训内容完成综合控制实训;观察系统运行情况..3、实训步骤3.1系统上电3.1.1把380V电源线接到电源插座上..3.1.2将空气开关打到“开”位置;系统电源模块上电..3.1.3PLC模块、变频器模块需要供电时;通过安全护套线接入交流220V电源..3.1.4装置平台上系统需要供电时;由PLC模块提供DC24V电源..平台接线区;三处直流供电区需短接..3.2系统连线:根据下表所示;连接实训导线3.2编制程序3.2.1根据使用的PLC主机;在上位机上运行相应的编程软件..3.2.2下载程序到PLC中;将PLC至“RUN”状态..4、控制要求按下启动按扭SB1后;系统正常标志绿色指示灯亮;PLC启动送料电机驱动放料盘旋转;物料由送料槽滑到物料提升位置;物料检测光电传感器开始检测;如果送料电机运行4秒钟后;物料检测光电传感器仍未检测到物料;则说明送料机构已经无物料;这时停机并报警;同时红色指示灯亮..当物料检测光电传感器检测到有物料;将给PLC发出信号;由PLC驱动上料单向电磁阀上料;机械手臂伸出手爪下降抓物料;然后手爪提升臂缩回;手臂向右旋转到右限位;手爪下降将物料放到传送带上;传送带输送物料;传感器则根据物料性质金属和非金属;分别由PLC控制相应电磁阀使气缸动作;对物料进行分拣..最后机械手返回原位重新开始下一个流程..按下停止按钮SB2;系统停止;绿色指示灯灭;上料单元及机械手立即复位;传送带传送完最后一个物料后停止..5.系统运行样例程序;参考配套技术光盘..附录一:THJDME-1型光机电一体化实训考核装置元件接线图附录二:THJDME-1型光机电一体化实训考核装置装配图。
光机电一体化技术的应用

1引言现代机械系统已发展成为光、机、电、磁、声、热、液、气、算于一体的技术系统。
在20世纪70年代,微电子技术曾引起新技术领域的深刻变革,机电一体化技术就是在微电子技术向机械工业领域渗透过程中逐渐形成并发展起来的一门独立的综合性交叉学科,经过几十年的发展,设计的机电一体化的内涵和外延得到不断地丰富和拓宽。
从最初的机械电子化、机械电脑化而发展到光机电一体化、机械智能化和微机械化阶段。
从20世纪90年代开始,光机电一体化技术引导着一场新的变革,光机电一体化是由光学、微电子、信息和机械及其他相矢技术交叉与融合而构成的综合性高新技术,是诸多高新技术产业和高新技术装备的基础。
从加工系统到医疗仪器、从家用电器到军事装备都离不开它。
信息・材料、能源、空间、海洋等高科技领域的技术发展和产业化、传统产业的技术改造、武器装备的现代化都要用到光机电一体化技术。
光机电一体化技术的特征是在机电一体化概念的基础上强调了光、光电子、激光和光纤通讯等术的作用,属于21世纪应用领域更为宽阔的机电一体化技术。
世界各国高新技术及其产业竞争的焦点正从微电子产业转向光电子信息产业,光机电一体化产业已经成为21世纪最具魅力的朝阳产业,光机电一体化技术产业以其特有的技术带动性、融合性和广泛适用性成为高新技术产业中的主导产业,将成为新世纪经济发展的重要支柱。
,目前国际上产业结构在不断进行调整,使各行业不断融合和协调发展,在提升传统产业的作用中,光机电一体化技术具有高度创新性在不断渗透性和增值性。
2光机电一体化技术在热动专业中的应用2.1光机电一体化系统应用背景红外测温仪广泛应用于电力,炼钢等行业,运用红外诊断技术对设备进行检测。
红外诊断技术对电气设备的早期故障缺陷及绝缘性能做出可靠的预测,使传统电气设备的预防,性试验维修(预防试验是50年代引进前苏联的标准)提高到预知状态检修,这也是现代电力企业发展的方向。
特别是现在大机组、超高电压的发展,对电力系统的可靠运行,尖系到电网的稳定,提出了越来越高的要求。
光机电
1-1光机电一体化的概念光机电一体化的概念萌芽可以追溯到德国提出的精密工程技术,精密工程技术定义为光、机、电一体化的综合技术。
一般认为,光机电一体化是由光学、机械学、微电子学、信息处理与控制和软件等各种相关技术交叉融合而构成的群体技术。
光机电一体化是在机电一体化的基础上引入光学技术而形成的一门新技术。
1-2光机电一体化的组成与实例为光机电一体化的组成,它大体包括4个部分,本体结构、计算机控制器、驱动装置、传感器。
本体结构:光机电一体化产品所有功能的支撑结构,完成系统的结构功能控制器:a.由计算机和输入输出口组成;b.控制系统分类:开环系统和闭环系统;c.控制算法:在控制其中完成。
传感器:将被测对象的状态转化为电信号的装置执行装置:a.按照控制器发出的指令,将电信号转换为机械能 b.驱动装置的类型:电动、气动、液动1.3光机电一体化的特点小型化、轻型化;知识密集;柔性化、智能化;高精度、多功能;可靠性高1.5光机电一体化的发展趋势微电子学、光学、计算机与控制技术的每一个新的进步都会极大的推动光机电一体化的发展。
未来的光机电一体化技术将朝着微型化、智能化、模块化、数字化、网络化、集成化的方向发展。
2章传感器与信号处理1.本章所讲的各种传感器的原理。
(1)位移传感器:①电位器:将直线位移、转角等机械量转换成电阻变化,在电位器两固定端加上电源电压后,则在电位器电刷处就可以得到电压的变化。
②感应同步器:感应同步器是用电磁感应原理来测量直线位移和角位移的传感器。
③光电编码器:被测量位置发生变化时,电刷与编码盘的位置随之变化,则电刷可得到随码盘而变化的电流,从而测出被测量的位移量。
④光栅:利用莫尔条纹现象将机械位移或模拟量转变为数字脉冲的精密测量装置。
常见的光栅分为长光栅和圆光栅两种,分别用于测量直线位移和角位移。
光栅根据制造方法和光学原理的不同分为以下两种:透射光栅,在磨制的光学玻璃或玻璃表面感光材料的涂层上刻有光栅或纹,利用光的透射现象进行检测。
光机电一体化设备操作流程
光机电一体化设备操作流程下载温馨提示:该文档是我店铺精心编制而成,希望大家下载以后,能够帮助大家解决实际的问题。
文档下载后可定制随意修改,请根据实际需要进行相应的调整和使用,谢谢!并且,本店铺为大家提供各种各样类型的实用资料,如教育随笔、日记赏析、句子摘抄、古诗大全、经典美文、话题作文、工作总结、词语解析、文案摘录、其他资料等等,如想了解不同资料格式和写法,敬请关注!Download tips: This document is carefully compiled by theeditor. I hope that after you download them,they can help yousolve practical problems. The document can be customized andmodified after downloading,please adjust and use it according toactual needs, thank you!In addition, our shop provides you with various types ofpractical materials,such as educational essays, diaryappreciation,sentence excerpts,ancient poems,classic articles,topic composition,work summary,word parsing,copy excerpts,other materials and so on,want to know different data formats andwriting methods,please pay attention!1. 设备启动前的准备检查设备的各个部件是否完好,包括机械部分、电气部分和光学部分。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
DLMCS-675光机电一体化实训系统
技术文件
图片仅供参考
一、产品概述
DLMCS-675光机电一体化实训系统,它的命名中,5代表5种电机(三相异步电动机,他励直流电机,直流电机,步进电机,伺服电机),7代表7中传感器(电感式,光电式,电容式,光纤式,温度传感器PT100,脉冲编码器,微动开关),6代表6个模块(环形输送,加工检测,
装配,加热,搬运,仓储)。
设备提供丰富的传感器类型和电机种类,基本涵盖了工业现场当中用到的控制类型。
PLC采用双系统,西门子系统与三菱系统,也概括了现在现场应用当中的主流品牌。
本设备能够最大限度的将工业现场还原给同学,让同学更多地了解工业现场的设备环境。
设备整体由铝合金实训平台、环形送料单元、加工检测单元、搬运单元、装配单元、加热单元、分类存储单元等部件构成。
控制系统采用模块组合式,由多种PLC模块、变频器模块、触摸屏模块、电源模块、闭环调速模块、步进控制模块、伺服控制模块组成,可按考核需要对模块进行灵活组合、安装和调试。
本系统涵盖了机电一体化和电气自动化专业中所涉及的PLC 控制、闭环直流调速、伺服电机调速、步进电机脉冲控制、传感器检测、气动元件、机械结构安装与系统调试等内容,为学生提供了一个典型的系统综合实训环境,使学生掌握的各项专业知识得到全面、综合地加深巩固并灵活应用。
1
由DL-ZLTS
和DL-CSFD
挂箱组成
图系统模块示意图
二、设备特点
1、该实训考核系统融典型机电一体化设备机械部件安装、气动系统的安装与调试、电气控制电路的安装、PLC 编程、机电设备安装与调试、自动控制系统安装与调试于一体,满足实训教学和竞赛的需要。
2、该实训系统控制模块为PLC模块、变频器模块,双闭环调速模块、伺服驱动及伺服电机模块、步进驱动及步进电机模块等模块;被控对象为送料单元模块、加工检测单元模块、搬运单元模块、装配单元模块、分类存储单元模块。
3、可自由组合系统控制及被控对象模块,完成简单或复杂的实训考核内容。
2
4、增加双闭环调速模块供拖动直流电机调速用,也可作为可调直流电源使用。
5、网络性:RS485实现1:N网络,RS232通迅实现人机互换,USB通迅实训上位机与下位机管理层通迅
三、技术参数
1、交流电源:单相AC220V±10% 50Hz
2、温度:-10℃~40℃;环境湿度:≤90%(25℃)
3、外形尺寸:2450mm×910mm×1380mm(长×宽×高)
4、整机容量:≤1KVA
5、气源压力:0.6Mpa
6、步进电机:两相,额定电压DC24V,步距角1.8°
7、伺服电机:额定电压AC220V,400W
8、三相异步电动机:额定电压AC380V,80W,减速比1/50
9、他励直流电机:额定电压DC220V,80W,1400rpm
10、传感器输出方式:NPN
11、丝杠螺距:5mm 行程:1100mm
3
4
12、涡轮蜗杆减速机减速比:1/40 四、主要系统配置
该系统配置了可编控制器(PLC )、变频器、气动系统、传感器、机械手、送料器、存储货架系统等实训部件。
整个系统为模块化结构的开放式实训平台,实训模块可根据不同的实训要求进行组合,配置了不同品牌的(PLC )模块和变频器模块。
系统的控制部分采用可编程控制器(PLC )作为控制系统的核心,执行机构由气动电磁阀-气缸构成的气压驱动系统实现整个系统的自动运行,并完成物料的分拣。
整个实训考核系统的模块之间连接方式采用安全导线连接,以确保实训和考核安全。
电气控制模块配置 序号
名称
主要元件及规格 单位
数量
备注
1
PLC 模块
FX3U-48MR FX3U-485-BD
FX3U-8EX FX3U-3A-ADP
个
1
配双头国标电源线
D1-3 10A250V )
2
PLC 模块DL-FX3U32T01
FX3U-32MT+FX3U-485-B
D
个
1
3 PLC 模块DL-FX3U32R01
FX3U-32MR+FX3U-485-B
D
个 1。