60,80,90mm系列直流无刷电机
欧诺克 直流无刷驱动器 产品说明书
深圳市欧诺克科技有限公司Shenzhen ONKE Technology Co., Ltd.座机:*************27381841电话:邓先生135****7106陈先生139****0920邮箱:***************网 址 : 地址:广东省深圳市宝安区福海街道怀德翠湖工业园13栋稳定的质量是我们赖以生存的根本优质的服务是我们继续发展的前提客户的满意是我们唯一追求的目标产品画册Product gallery专业生产直流无刷驱动器、无刷电机及自动化控制系统深圳市欧诺克科技有限公司直流无刷驱动器目录匠心制造精益求精“一、公司介绍03二、直流无刷驱动器091. 驱动器介绍与型号说明092. BC、BC2无刷系列技术指标113. 驱动器应用领域194. 驱动器外设配件21 0102C O M P A N Y PROFILE以精密制造引领未来Leading the future with precision manufacturing公司简介Company Profile深圳市欧诺克科技有限公司成立于2010年,是一家专业研发生产伺服电机和驱动器的高新技术企业,公司技术力量雄厚,检测手段先进,欧诺克人本着不求最全,只求最精的信念,为生产出各类伺服电机、各类驱动器而不懈奋斗。
欧诺克人以鹰的精神,挑战尖端,生产出性价比的各类伺服电机和驱动器,以鹰的敏锐洞察力洞察市场,随时改进、创新来满足市场的需求。
深圳市欧诺克科技有限公司产品主要有:伺服驱动器、伺服电机、直流伺服驱动器,直流伺服电机,交流伺服驱动器,交流伺服电机,低压伺服驱动器,低压伺服电机,直线电机驱动器,DDR马达驱动器,音圈电机驱动器,直流无刷驱动器,直流无刷电机,Rs485,CANopen总线,EtherCAT总线,电子凸轮伺服系统,大功率伺服驱动器、大电流伺服驱动器,专用伺服驱动器和自动化控制系统,十年来凭借精湛的技术与国内国外众多知名企业公司建立了互利共赢的合作。
AXU系列
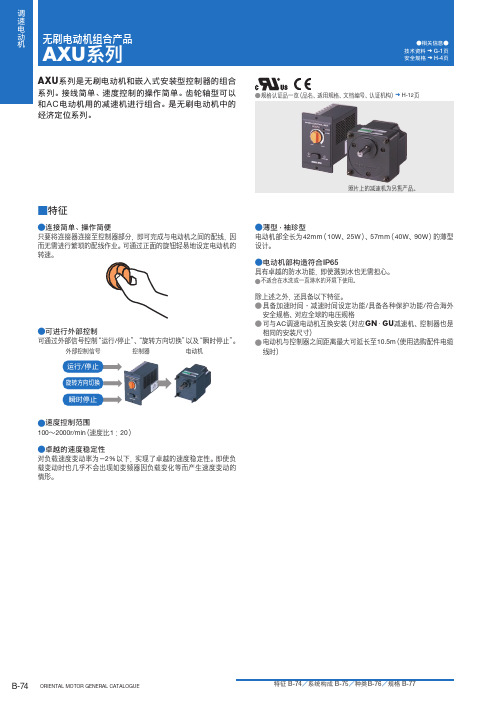
① 减速机安装尺寸 ② 齿轮轴型
③ 减速比
GN齿轮轴型 ④ GU齿轮轴型
2 :60mm 4 :80mm 5 :90mm
GN :GN齿轮轴型 GU :GU齿轮轴型
(例)25 :减速比1 :25 10X为仅限减速比为1 :10的中间减速机 K :GN-K减速机、RoHS指令符合品
另售 电动机转速表
SDM496
安装底座 SOL4M5
弹性 联轴器 MCL401010
电缆线
选
购
配 件
转速表
其他
安装
特性 B-78/外形图 B-81/连接 B-85/组合一览 B-87
客户咨询中心 : 400-820-6516 B-75
调 速 电 动
机 ■品名的阅读方法
●AXU 系列
AXU 4 25 A - GN
0.15 0.125 0.1
短时运行领域
额定转矩
转矩[N·m]
转矩[N·m]
连续运行领域
连续运行领域
0 0 100
1000 转速 [r/min]
2000
0 0 100
1000 转速 [r/min]
2000
AXU540A-GN/AXU540C-GN/AXU540S-GN AXU540A-A/AXU540C-A/AXU540S-A
KB :GU减速机(箱型)、RoHS指令符合品 KBH :GU减速机(高强度型)、RoHS指令符合品
■种类
● 电动机
输出 功率 10W
25W
40W
90W
电源电压
单相100-115V 单相200-230V 三相200-230V 单相100-115V 单相200-230V 三相200-230V 单相100-115V 单相200-230V 三相200-230V 单相100-115V 单相200-230V 三相200-230V
无刷直流电动机组合

EMC会因配线配置的情况而改变。请在组装至机 台上的状态下进行EMC的最终确认。 如需这项产品的EMC相关资料,请与本公司联系。
■适用规格相关数据
EMI EMS
Emission Tests Radiated Emission Test Immunity Tests Electrostatic Discharge Immunity Test Radiation Field Immunity Test Fast Transient/Burst Immunity Test Conductive Noise Immunity Test Power Frequency Magnetic Field Immunity Test
八极九槽无刷直流电动机

第1章绪论1.1 课题背景和选题意义低速大转矩电动机淘汰了笨重的减速机构,避免了减速机构带来的结构复杂、转动惯量大、效率降低、噪声增加、润滑油泄露、传动间隙、磨损维护频繁等各种不利影响。
因此这类直接驱动电动机作为传统电动机加减速器系统的替代产品得到了很大的重视,并己得到一定程度的应用.在各种各样的直接驱动电机中,与其它类型低速大转矩直接驱动相比,直接驱动永磁无刷电机具有更高的功率密度和转矩密度,具有更高的运行效率,因此更具应用前景。
低速大转矩永磁无刷电机尽管在结构和原理上等同于传统的高速永磁无刷电机,但随着现代科技的发展,人们对其性能要求发生了很大变化,如对转矩脉动要求严格,同时为适应目前的节能大背景,对其效率指标也提出了新的要求。
其次,由于该种电机体积较大,电机的有效材料消耗量大,如何提高该种电机的有效材料利用率是该种电机研制开发的一个重要课题。
过去,永磁无刷电机大多采用整数槽绕组的设计,近年分数槽绕组技术在无刷直流电动机上应用日益广泛,而且具有自己的一些特点。
与整数槽相比,无刷电机采用分数槽特别是采用每极每相槽数小于1的分数槽绕组甚至分数槽集中绕组有如下好处:1)在电机设计时,电机的齿部磁密应尽可能均匀,这样才可以充分利用电机的有效材料,充分利用电机的有效空间2)平均每极下槽数减少,以较少数目的大槽代替较多数目的小槽,有利于槽满率的提高、线圈周长和绕组端部缩短,使电动机绕组较少、铜损降低,进而提高电动机的效率、降低温升、降低时间常数、提高快速性、增加功率密度等。
3)增加绕组的短距和分布效应,改善电动势波形的正弦性。
每极每相槽数4)由于分数槽电机齿槽转矩频率较高,齿槽效应转矩幅值通常比整数槽绕组小,有利于降低振动和噪声5)分数槽绕组电机有可能得到线圈节距了=1的设计(集中绕组)。
每个线圈只绕在一个齿上,缩短了线圈周长和绕组端部伸出长度,减低用铜量;各个线圈端部没有重叠,不必设相间绝缘。
采用高性能的永磁材料,就可满足电机的尺寸、重量和性能之间的协调要求,多极磁路可减小磁扼,因而可减小电机的体积与重量,多相供电可以增加电机的电负荷,提高绕组的利用率。
BMU资料

轻松连接 电动机和驱动器。
电动机连接器属于可轻松穿过弹性导管及电缆 线固定头的小型尺寸。
电源与 I/O 连接器为 免螺丝型。
电源连接器、I/O连接器的连接,无需焊接及专用 压接工具。只需按下橙色按钮,插入导线即可。
使用一个开关实现 快速启动。
拨至[RUN]侧,电动机起动, 拨至[STAND-BY]侧,减速停止。 利用前面的运行开关可实现简单驱动。
1、2、3m 或未附属
组合产品价格范围 1,859∼2,873ݩ 1ɼ989∼3,095元 2,320∼3,694ݩ
下面介绍适用于速度控制的无刷电动机的特点。
无刷电动机上,无需使用通常被认为是 DC电动机缺点的刷子和整流子等机械 触点。 DC电动机使用刷子和整流子进行旋转, 因此,需要定期进行维护; 而无刷电动机使用霍尔IC(磁性传感器) 检测到的信号,利用驱动电路的晶体管的 ON/OFF进行旋转,因此,无需维护。
135
90
●装置的节能化
电 动 机 输 出 功 率 提 升 到1.3倍 的 同 时,电 动 机 损 耗降低约26%。是一种非常有助于装置实现节能 的电动机。
160
损耗减少26%
140
31
120
100
42
损耗
80
60 40
120
输出功率
1.3倍 90
输出功率
20
0 BMU系列
120W
三相电动机 90W
变频器控制 三相感应 电动机
AC调速 电动机
速度控制范围*
速度比
80∼4000r/min
1:50
200∼2400r/min
1:12
各类电机所对应碳刷型号及尺寸

13
30
24伏汽车暖风电机、风扇电机、发电机、24伏DC电机12V blower,ecm motor,alternator,24V DC motor
Cm8130
3.43
30
2.68
26.7
L
L
13
30
24伏暖风电机、风扇电机、交流发电机
24V blower motorengine cooling fan,altermator
Cm802
0.52
20
3.85
34.5
VL
L
19
25
12伏永磁减速起动机36伏助动车
12V pm starter,36 velectric bicycle
Cm1S
0.32
68
9
68
0.24
0.11
23
30
金属含量高,适用于接地装置和电镀生产线
High metal content grade for earthing and plaring applications
ET50S
62
60
1.65
10
2.9
0.13
12
50
ET80S
57
45
1.58
16
2.8
0.1
12
50
ET70S
50
43
1.62
15
2.8
0.11
12
50
适用于高速牵引电机、整流子困难的直流电机、工业吸尘器电机
traction motors and d.c.machines for difficut communtation
d.c. machines up to 40V,automobile starts and exciting slip rings of asynchronousm
电机型号大全 (2)
电机型号大全1. 直流电机1.1 直流有刷电机直流有刷电机是一种常见的电动机,在众多领域应用广泛。
以下是一些常见的直流有刷电机型号:•DC130-30:这款直流有刷电机具有高效率和高转矩的特点,适用于机器人、自动门、电动工具等领域。
•DC235-40:这款直流有刷电机体积小巧,功率高,适用于电动车、电动自行车等领域。
•DC320-50:这款直流有刷电机重量轻,适合用于玩具、模型等领域。
•DC500-60:这款直流有刷电机具有高速、高转矩和高效率的特点,适用于机械设备、自动化系统等领域。
1.2 直流无刷电机直流无刷电机是一种高效、低噪音、低维护的电动机。
以下是一些常见的直流无刷电机型号:•BLDC220-20:这款直流无刷电机具有高效率、长寿命和低噪音的特点,适用于家电、汽车等领域。
•BLDC260-25:这款直流无刷电机具有高转矩和低电磁干扰的特点,适用于航空模型、机器人等领域。
•BLDC310-30:这款直流无刷电机适用于无人机、机械手臂、智能家居等领域,具有高速、高转矩和高效率的特点。
•BLDC420-35:这款直流无刷电机适用于电动摩托车、电动汽车等领域,具有高效率和长寿命的特点。
2. 交流电机2.1 三相异步电机三相异步电机是一种常见的交流电机。
以下是一些常见的三相异步电机型号:•Y2-90L-2:这款三相异步电机适用于风机、泵、制冷设备等领域,具有启动转矩大、效率高的特点。
•Y2-100L-4:这款三相异步电机适用于机床、风机、水泵等领域,具有运行稳定、噪音低的特点。
•Y2-132M1-6:这款三相异步电机适用于风机、冷却装置等领域,具有结构紧凑、效率高的特点。
2.2 单相异步电机单相异步电机是一种常见的交流电机,通常用于家庭电器和轻载设备。
以下是一些常见的单相异步电机型号:•YY70-4:这款单相异步电机适用于洗衣机、插座风扇等领域,具有体积小、功率高的特点。
•YY90L-6:这款单相异步电机适用于空调、冷却设备等领域,具有低噪音、运行稳定的特点。
台邦无刷直流减速电机

无刷直流电动机 Brushless DC Motor
G
5
BLD(P) 40 - 220 GN - 30S
⑴⑵
⑶
⑷⑸
⑹
⑺
⑴ 企业代号 Enterprise Code
⑵ 座机号 Code
⑶ 电机型式 Motor type
⑷ 输出功率 Output Power ⑸ 电源电压 Voltage ⑹ 电机轴形状 Shape of motor shaft
运转电机后,用电阻法来测量时,线圈绕组温度的上升数值在 80°C 以下。 The temperature rise should be lower than 80°C measured by resistance method when the motor is working.
B 级 (130°C) B class (130°C)
我们的服务 : 售前服务: 我们为您的决策铺平道路 ·需求分析 ·负荷测试 ·模拟和测试
实施过程: 我们愿与您一同找出合适的解决方案 ·安装、整合 ·专业指导 ·认证
售后服务: 我们承担应该负有的责任 ·服务协议 ·维修 ·配件管理
索引
无刷直流减速电机
产品特征
01
直流电机的一般规格
01
型号的阅读方法
无刷直流电机由电动机主体和驱动器组成,是一种典型的机电 一体化产品,其以体积小、噪音低、效率高、调速范围广、稳态转 速误差小等特点,越来越被市场所推崇。
直流无刷马达特点 : 低温升 , 高效率 , 省电省能源 , 高速 , 低速 时都具有相同扭力 , 体积小 , 节省安装空间 , 低速度变动率 , 高速度 安定性 , 具备速度追踪补偿机能。宽广的高效率转速操作范围,十 分适合负载变化大,速度变化多的操作条件。马达内含温度侦测组 件,可以预防过负载使用,保护马达过热。
直流无刷电机基本参数
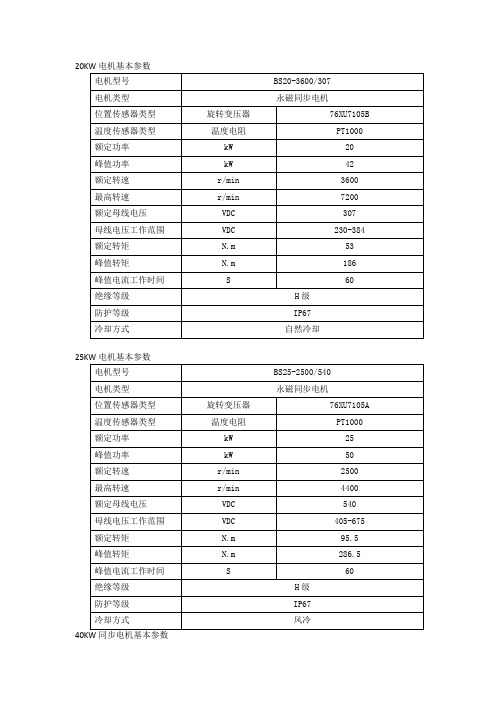
r/min
4400
额定母线电压
VDC
540
母线电压工作范围
VDC
405-675
额定转矩
N.m
95.5
峰值转矩
N.m
286.5
峰值电流工作时间
S
60
绝缘等级
H级
防护等级
IP67
冷却方式
风冷
40KW同步电机基本参数
电机型号
BS40-4500/540
电机类型
永磁同步电机
位置传感器类型
旋转变压器
76XU7103A
N.m
53
峰值转矩
N.m
186
峰值电流工作时间
S
60
绝缘等级
H级
防护等级
IP67
冷却方式
自然冷却
25KW电机基本参数
电机型号
BS25-2500/540
电机类型
永磁同步电机
位置传感器类型
旋转变压器
76XU7105A
温度传感器类型
温度电阻
PT1000
额定功率
kW
25
峰值功率
kW
50
额定转速
r/min
2500
温度传感器类型
温度电阻
PT1000
额定功率
kW
90
峰值功率
kW
180
额定转速
r/min
4911
最高转速
r/min
12000
额定母线电压
VDC
540
母线电压工作范围
VDC
405-675
额定转矩
N.m
175
峰值转矩
N.m
电机型号尺寸大全对照表
电机型号尺寸大全对照表在工业生产和日常生活中,电机是一种广泛应用的设备,用于驱动各种机械设备和家电产品。
为了方便选择和使用电机,人们需要掌握不同型号电机的尺寸信息。
本文将为您提供一份电机型号尺寸大全对照表,方便您在选购和使用电机时进行参考。
一、直流电机尺寸对照表直流电机是一种常见的电机类型,其尺寸信息通常以编号或型号进行表示。
以下是一份直流电机尺寸对照表供您参考:1. 直流电机型号:D-42尺寸:直径42毫米,长度60毫米,轴径8毫米2. 直流电机型号:D-60尺寸:直径60毫米,长度80毫米,轴径10毫米3. 直流电机型号:D-80尺寸:直径80毫米,长度100毫米,轴径12毫米4. 直流电机型号:D-100尺寸:直径100毫米,长度120毫米,轴径15毫米以上是一些常见的直流电机型号和尺寸信息,供您在选择和应用直流电机时进行参考。
二、交流电机尺寸对照表交流电机是另一种常见的电机类型,其尺寸信息也可通过型号进行区分。
以下是一份交流电机尺寸对照表供您参考:1. 交流电机型号:Y80-4尺寸:直径80毫米,长度112毫米,轴径14毫米2. 交流电机型号:Y90S-4尺寸:直径90毫米,长度155毫米,轴径19毫米3. 交流电机型号:Y100L1-4尺寸:直径100毫米,长度200毫米,轴径24毫米4. 交流电机型号:Y112M-4尺寸:直径112毫米,长度260毫米,轴径28毫米以上是一些常见的交流电机型号和尺寸信息,该对照表可供您在选用不同型号的交流电机时进行参考。
三、步进电机尺寸对照表步进电机是一种特殊类型的电机,其尺寸也有所不同。
以下是一份步进电机尺寸对照表供您参考:1. 步进电机型号:42BYGHW208尺寸:外径42毫米,长度48毫米,轴径5毫米2. 步进电机型号:57BYGH115尺寸:外径57毫米,长度56毫米,轴径6毫米3. 步进电机型号:86BYGH450B尺寸:外径86毫米,长度110毫米,轴径8毫米4. 步进电机型号:110BYGH550尺寸:外径110毫米,长度150毫米,轴径10毫米以上是一些常见的步进电机型号和尺寸信息,该对照表可供您在选择和应用步进电机时进行参考。
无刷直流电动机 BX 系列 说明书

无BX 系列相 关 情 报B-7BXFBL Ⅱ使用须知刷直流电动机新 产 品技术资料 ……………………………………………G-1其他相关介绍 ………………………………………H-1无刷直流电动机无刷直流电动机组合产品BX系列高性能·高功能的无刷直流电动机组合产品。
备有30W~400W高输出的种类。
在基本型的高性能之速度控制下,加上系统升级套件的组合之后,即可使用转矩控制功能、定位控制模式等。
■特征●广泛的速度控制范围·均匀转矩在30r/min~3000r/min广泛的可变速度控制范围内、发挥低速至高速的均匀转矩。
通过更高的起动转矩时可在起动、停止时,使用较大的转矩。
●卓越的速度稳定性其速度变动率为±0.05%(对负载)时,实现了高精度的速度控制。
此外,可在中高速时、大幅减低运行的不均匀现象。
●上下驱动时可控制速度使用带电磁制动电动机进行上下驱动(下降运行)时,仍可稳定的控制速度。
也可以通过驱动器进行自动控制电磁制动。
请注意∶ 上下驱动时,产生再生能量。
请务必使用另售的再生器。
●系统升级套件可提升性能加上另售的系统升级套件并经数字设定后,可大幅提高速度控制的功能与特性。
·扩大速度控制范围 3~3000r/min·改善速度变动率 对温度∶±0.05%(基本型∶±0.5%)·最多可设定8段速度数据(基本型∶2段)〈系统升级套件〉数据设定器OPX-1A●转矩限制功能使用系统升级套件,即可使用转矩限制功能。
对应用途或使用状况,转矩限制功能可控制电动机输出转矩。
●定位控制模式只需以系统升级套件设定数据,即可控制定位。
分辨率达0.72˚(500脉冲/1转)节,最多可设定6点的定位数据,其中可设定至2点为连续运行用。
此外,也可以设定机械原点返回、电原点返回运行。
■规格·CE标志●各类安全规格乃以电动机单体品名或驱动器单体品名申请取得认证。
电机的分类及功能特性
电机分类电机的种类1.按工作电源种类划分:可分为直流电机和交流电机。
1.1直流电动机按结构及工作原理可划分:无刷直流电动机和有刷直流电动机。
1.1.1有刷直流电动机可划分:永磁直流电动机和电磁直流电动机。
1.1.1.1电磁直流电动机划分:串励直流电动机、并励直流电动机、他励直流电动机和复励直流电动机。
1.1.1.2永磁直流电动机划分:稀土永磁直流电动机、铁氧体永磁直流电动机和铝镍钴永磁直流电动机。
1.1其中交流电机还可分:单相电机和三相电机。
2.按结构和工作原理划分:可分为直流电动机、异步电动机、同步电动机。
2.1同步电机可划分:永磁同步电动机、磁阻同步电动机和磁滞同步电动机。
2.2异步电机可划分:感应电动机和交流换向器电动机。
2.2.1感应电动机可划分:三相异步电动机、单相异步电动机和罩极异步电动机等。
2.2.2交流换向器电动机可划分:单相串励电动机、交直流两用电动机和推斥电动机3.按起动与运行方式划分:电容起动式单相异步电动机、电容运转式单相异步电动机、电容起动运转式单相异步电动机和分相式单相异步电动机。
4.按用途划分:驱动用电动机和控制用电动机。
4.1驱动用电动机划分:电动工具(包括钻孔、抛光、磨光、开槽、切割、扩孔等工具)用电动机、家电(包括洗衣机、电风扇、电冰箱、空调器、录音机、录像机、影碟机、吸尘器、照相机、电吹风、电动剃须刀等)用电动机及其它通用小型机械设备(包括各种小型机床、小型机械、医疗器械、电子仪器等)用电动机。
4.2控制用电动机又划分:步进电动机和伺服电动机等。
5.按转子的结构划分:笼型感应电动机(旧标准称为鼠笼型异步电动机)和绕线转子感应电动机(旧标准称为绕线型异步电动机)。
6.按运转速度划分:高速电动机、低速电动机、恒速电动机、调速电动机。
1、什么是直流电机?答:输出或输入为直流电能的旋转电机,称为直流电机2、什么是交流电机答:输出或输入为交流电能的旋转电机,称为交流电机。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
汉德保60mm系列直流无刷电机
外径为60mm的微型直流无刷电机
该系列的产品是为高转速和高输出功率独特的磁钢而设计的,且因为其无刷结构可获得较高的使用寿命。
通过集成的霍尔传感器,能便捷地调整转速。
还可通过安装方便、价格低廉的编码器改装为一个高性能伺服电机。
通过结构相同的行星齿轮箱,可获得更高的扭矩,从而进一步扩展功率范围。
按ISO9000建立的品质管理体系,保证了产品的高可靠性、高精确性、寿命长、低噪声、低发热等特点。
应用领域:自动门、送风设备、自动化设备、医疗器械等。
可根据用户需求选配编码器,行星减速机,齿轮减速机,制动刹车器等。
参数描述
2)工作电压,功率,输出力矩,出轴直径及机身长度等等均可根据用户需求订制;
外形图:
(该尺寸图设计时找我要图)
接线图:
(和56mm接线图一样)
80mm系列直流无刷电机
外径为80mm的微型直流无刷电机
该系列的产品是为高转速和高输出功率独特的磁钢而设计的,且因为其无刷结构可获得较高的使用寿命。
通过集成的霍尔传感器,能便捷地调整转速。
还可通过安装方便、价格低廉的编码器改装为一个高性能伺服电机。
通过结构相同的行星齿轮箱,可获得更高的扭矩,从而进一步扩展功率范围。
按ISO9000建立的品质管理体系,保证了产品的高可靠性、高精确性、寿命长、低噪声、低发热等特点。
应用领域:自动门、送风设备、自动化设备、医疗器械等。
可根据用户需求选配编码器,行星减速机,齿轮减速机,制动刹车器等。
参数描述
2)工作电压,功率,输出力矩,出轴直径及机身长度等等均可根据用户需求订制;
外形图:
(该尺寸图设计时找我要图)
接线图:
(和56mm接线图一样)
90mm系列直流无刷电机
外径为90mm的微型直流无刷电机
该系列的产品是为高转速和高输出功率独特的磁钢而设计的,且因为其无刷结构可获得较高的使用寿命。
通过集成的霍尔传感器,能便捷地调整转速。
还可通过安装方便、价格低廉的编码器改装为一个高性能伺服电机。
通过结构相同的行星齿轮箱,可获得更高的扭矩,从而进一步扩展功率范围。
按ISO9000建立的品质管理体系,保证了产品的高可靠性、高精确性、寿命长、低噪声、低发热等特点。
应用领域:自动门、送风设备、自动化设备、医疗器械等。
可根据用户需求选配编码器,行星减速机,齿轮减速机,制动刹车器等。
参数描述
2)工作电压,功率,输出力矩,出轴直径及机身长度等等均可根据用户需求订制;/
外形图:
(该尺寸图设计时找我要图)
接线图:
(和56mm接线图一样)。