集美大学《航海雷达与ARPA》试题集
航海仪器新题 已修改

二.雷达与ARPA1.【单选】下列说法中,——是正确的。
2.雷达误差在安装是已经矫掉,测量数据可直接使用3.虽然在安装时已经矫正过误差,但是还存在由图像扩展等因素引起的误差,也应修正。
4.雷达用的超高频买冲波,所以测量精度很高,不会有误差5.以上说法都对6.【单选】在ARPA中的一个主要参数TCPA用来表示——。
7.会遇距离8.会遇时间9.本船到最近会遇点的距离10.目标到最近会遇点的时间11.【单选】习惯上常将DCPA简称CPA,它表示预测目标到最接近本船的——12.时间13.距离14.位置15.方向16.【单选】人工标绘的前提条件是,在标绘期间——17.目标保速保向,本船保速18.目标保速保向,本船保向19.目标和本船都需保速保向20.目标和本船都不需保速保向21.【单选】ARPA的PPI之所以能实现高亮度显示是因为——22.加快径向扫描速率23.加快天线旋转速度24.采用非实时扫描方式25.提高了雷达的分辨力26.【单选】本船陀螺罗经有故障时,则——27.ARPA不能启动28.RADAR不能使用29.ARPA和RADAR均可照常使用30.ARPA的功能不执行31.【单选】本船计程仪有故障时,则——32.ARPA照常可使用33.RADAR不能使用34.RADAR照常可使用,但ARPA不能使用35.RADAR和ARPA都不能使用36.【单选】雷达向ARPA提供的基本信息是37.回波原始视频信号,触发脉冲、雷达天线角位置信号及船首线信号38.目标的位置信息,航向信息,速度信息39.目标的方位信息吗,目标距离信息,船首线信息40.触发脉冲信息,天线位置信息,航程信息41.【单选】在ARPA的PPI综合显示器上,每一被跟踪的目标将出现一根矢且,矢量的长度表示在设定的矢量时间内______42.目标的运行方向 B.目标的运动距离 C目标的运动速度 D 目标的运动数据43.【单选】当将模拟天线角位置信号变成数字信号时若要求最低位代表0.0880,那么,需用_____位二进制数字。
大学航海学考试(习题卷24)

大学航海学考试(习题卷24)第1部分:单项选择题,共98题,每题只有一个正确答案,多选或少选均不得分。
1.[单选题]在地图投影中,纬度渐长率是________ (A)将地球作为椭圆体而必然产生的B)将地球作为圆球体而必然产生的C)等角正圆柱投影必然存在的D)以上都是答案:C解析:2.[单选题]雾中用雷达测的他船在左前方6海里 ,无碰撞危险,同时听到雾号显似在左前方,你船应_________ 。
A)向右转向B)向左转向C)减速或停车D)保向、保速,继续观测答案:C解析:3.[单选题]()作为该时区的区时。
( )A)时区边界的地方平时B)世界时C)平时D)时区中线的地方平时答案:B解析:4.[单选题]高度差是 ______ 。
A)观测高度与计算高度之差B)六分仪高度与真高度之差C)真高度与计算高度之差D)六分仪高度与计算高度之差答案:C解析:5.[单选题]在大风浪中拖带航行应尽量采取______。
A)顶浪航行B)顺浪航行C)斜浪航行D)滞航方法答案:D解析:6.[单选题]某轮由赤道向北航行,无航行误差,计程仪改正率为0.0%,则1h后实际船位位于推算船位的_________(不考虑风流影响)。
A)北面B)南面C)同一点D)不一定答案:A解析:7.[单选题]渔船在捕捞作业时,应由_________值班。
A)船长B)船副C)水手D)船长、船副轮流答案:D解析:8.[单选题]在航海实际中,通常通过观测近距离(0.5nmile之内)一平直岸线来确定测距误差。
若发现笔直岸线在荧光屏上呈向扫描中心凸出的曲线,说明( )。
A)雷达测量距离大于实际距离B)雷达测量距离小于实际距离C)正常显示,无测距误差D)雷达显示器故障答案:B解析:9.[单选题]机动船甲与三艘机动船同时构成碰撞危险,其中一船为对遇,另外两船分别在左、右正横前,甲船应_________ 。
A)鸣一短声右转B)鸣二短声左转C)鸣三短声倒车D)鸣五短声继续航行答案:A解析:10.[单选题]两船避让责任和义务完全相同的是_________ 。
航海雷达与ARPA
CPA : closest point of approach 最接近点,至CPA 的距离TCPA : time to CPA 到达CPA 的时间PPC : possible point of collision 可能碰撞点PAD : predicted area of danger 预测危险区VRM : variable range marker 可移动距标,活动距标EBL : electronic beaning line 电子方位线STC : sensitivity time control 海浪干扰抑制FTC : fast time constant 雨雪干扰抑制AFC : auto frequency control 自动频率控制IR/RIC : radar interence cancel 同频雷达干扰抑制1.测距原理:因为超高频无线电波在空间传播时具有等速,直线传播的特性,并且遇到物标有良好的反射性,记录雷达脉冲波离开雷达的时间t1和无线电脉冲遇到物标反射回到天线的时间t2,则物标距离天线的距离S 可由下式求的:T C T T C S ∆=-=2)(212 2.提高雷达的测距精度注意事项:1.正确调节显示器控制面板上的各控制按钮,使回波饱满清晰。
2.选择包含所测物标的合适量程,使物标回波显示于1/2~2/3量程处。
3.应定期将活动距标与固定距标进行比对,进行校准。
4.活动距标应和回波正确重合,即距标圈内缘与回波前沿相切。
5.尽可能选用短脉冲发射工作状态,以减少回波外侧扩大效应。
3.提高雷达的测方位精度注意事项:1.正确调节各控钮,使回波饱满清晰。
2.选择合适量程,使物标回波显示于1/2~2/3量程区域,并注意选择图像稳定显示方式(如“北向上”)。
3.调准中心,减少中心差。
实现应垂直屏幕观测,以减少视差。
4.检查船首线是否在正确的位置上。
应校准罗经复示器、主罗经及船首线所指航向值三者是否一致。
大学航海学考试(习题卷5)

大学航海学考试(习题卷5)第1部分:单项选择题,共259题,每题只有一个正确答案,多选或少选均不得分。
1.[单选题]我国沿海左侧标的顶标特征为()。
( )A)红色罐形B)红色锥形C)绿色罐形答案:A解析:2.[单选题]使用六分仪测定已知高度H(m)的物标的垂直角α(‘),求距离(n mile)公式是:A)@B)@C)@D)@答案:B解析:3.[单选题]英版海图图式“ + ”或“”表示______A)@适淹礁B)@ 深度不明危险暗礁C)@ 已知深度危险暗礁D)@非危险暗礁答案:B解析:4.[单选题]在大圆海图上,大圆弧为直线,恒向线则为曲线;在北半球恒向线为________的曲线。
A)@凸向南极B)@ 凸向赤道C)@ 凸向北极D)@凸向任意方向答案:B解析:5.[单选题]直航船的首要义务为_________ 。
A)采取最有助于避碰的行动B)独自采取操纵行动以避免碰撞C)保向、保速D)密切注视让路船的行动答案:C解析:6.[单选题]在通常的航海图上,磁差资料一般刊印在________(A)向位圈(罗经花)上B)等磁差曲线上C)海图标题栏内D)A和答案:A解析:7.[单选题]差分GPS不能消除或减小( )。
A)多径效应B)星历表误差C)卫星钟剩余误差D)电离层折射误差答案:A解析:8.[单选题]关于雷达目标跟踪距离的局限性,下列说法错误的是( )。
A)应至少在3nmile、6nmile和12nmile量程上有效B)跟踪距离应至少延伸至12nmileC)跟踪的目标不在使用量程内时,依然保持跟踪D)跟踪目标进入3nmile后,雷达自动放弃对目标的跟踪答案:D解析:9.[单选题]真航向是__________A)真北和航向线之间的夹角B)真北和方位线之间的夹角C)陀罗北和航向线之间的夹角D)陀罗北和方位线之间的夹角答案:A解析:10.[单选题]以下关于杂波抑制的说法错误的是( )。
A)对影响雷达观测的强海浪干扰杂波应该使用STCB)在雨雪天气时,可以选用S波段雷达来减弱雨雪回波C)在同频干扰严重的区域,应尽量选择小量程D)宽脉冲比窄脉冲更能减弱海浪杂波的干扰答案:D解析:11.[单选题]船舶由深水进入浅水区,发生的现象下述哪项正确?A)旋回性提高,航向稳定性提高B)旋回性下降,航向稳定性下降C)旋回性提高,航向稳定性下降D)旋回性下降,航向稳定性提高答案:D解析:12.[单选题]某张墨卡托海图的基准纬度A)@等于该图的平均纬度B)@ 等于该图的最高纬度C)@ 等于该图的最低纬度D)@可能不在该图内答案:D解析:13.[单选题]AIS的主要功能有()。
雷达观测与标绘和雷达模拟器、ARPA习题集(新题库)
雷达观测与标绘和雷达模拟器一.判断题:1.船用雷达都是多普勒雷达。
2.船用雷达绝大多数是脉冲雷达。
3.船用雷达利用测量电磁波在天线与目标之问的往返时间来测距的。
4.船用雷达测距原理是测量电磁波在天线与目标之间的频率变化。
5.雷达发射机产生的射频脉冲功率大,频率非常高。
6.磁控管振荡产生周期性大功率的射频脉冲。
7.磁控管振荡产生周期性大功率的调制脉冲。
8.雷达接收机绝大多数都采用超外差式接收机。
9.雷达接收机都采用直放式接收机。
10.雷达电源都采用中频电源,频率范围在400-2000HZ之间。
1 1.雷达电源均采用中频电源,其频率在400—2000HZ之间变化。
12.雷达电源要稳定,一般要求在船电变化4-20%的情况下,中频电压输出变化应小于±5%。
1 3、雷达定时器产生周期性的射频脉冲,控制雷达的同步工作。
14.触发脉冲通过延时线延时,可以消除发射和扫描不同步引起的测距误差。
15.有磁控管电流那么天线上就有电磁波辐射。
16.磁控管上所加的是正向高压调制脉冲。
17.磁控管上所加的是负向高压射频脉冲。
18.实际操作中,我们通常依据是否有晶体电流来判断发射机工作是否正常。
19.一般说来,磁控管电流正常,则雷达发射机工作正常。
20.三分钟自动延时电路的作用是保护磁控管。
21.为了延长调制管的寿命,应在更换新管时对其进行老练。
22.雷达发射脉冲的持续时间取决于调制脉冲的宽度。
23.园极化天线可以有效抑制同频干扰。
24.园极化天线只在雨雪天时使用。
25.收发开关的作用是防止发射的大功率脉冲进入接收机,而使接收的微弱的回波信号进入发射机。
26.船用雷达天线是定向天线。
27.发现混频晶体连续烧坏,首先应检查收发开关。
28.由于波导内表面光洁度高,波导的变形并不会影响电磁波的传输。
29.雷达本机振荡器使用的元件有可能是微波混频晶体三极管。
30.雷达接收机中混频器输出的信号是中频信号。
31.混频晶体比较脆弱,为防高频辐射应放在屏蔽的锚管中保管。
大学航海学考试(习题卷28)
大学航海学考试(习题卷28)第1部分:单项选择题,共98题,每题只有一个正确答案,多选或少选均不得分。
1.[单选题]为了确切掌握锚链抛出或绞入的节数,必须在各节锚链上标记记号。
其标记法从第______节之间开始,重复第一与第二节及其它相应各节之间同样的方法进行标记。
A)5~6节B)6~7节C)7~8节D)4~5节答案:B解析:2.[单选题]若航向误差为1° ,当航行50海里后船位偏移量为________。
A)0.87海里B)1.7海里C)7/2海里D)3/4海里答案:A解析:3.[单选题]”此图标标识是( )。
A)雷达跟踪目标和AIS报告目标的关联目标B)雷达目标PADsC)被选雷达目标D)丢失雷达目标答案:A解析:4.[单选题]如果推算船位点(计算点)在天文船位圆之内,则高度差 Dh _____ 。
A)大于0B)小于0C)等于0D)无法确定答案:B解析:5.[单选题]现代雷达不包括下列哪个功能?( )A)磁控管工作时间的查看及修改B)磁控管工作状态参数查看解析:6.[单选题]我国沿海航行,发现一绿色杆形浮标,其上有一绿色锥形顶标,该标为()。
( )A)左侧标B)右侧标C)推荐航道左侧标D)推荐航道右侧标答案:B解析:7.[单选题]某轮顶流航行,船速15节,流速2节,2小:时后相对计程仪读数差为32.’0,计程仪改正率一10%,则该轮实际航程为_______A)@28.8B)@ 32.’8C)@ 24.8D)@35.’2答案:C解析:8.[单选题]引起船体发生总纵弯曲的主要原因是沿着船长方向每一点上:A)重力分布不平衡造成的B)浮力分布不平衡造成的C)压力分布不平衡造成的D)重力和浮力分布不平衡造成的答案:D解析:9.[单选题]根据雷达性能标准 MO MSC192(79)要求,雷达跟踪目标需要多长时间才能给出目标的预测运动?( )A)IminB)3minC)5minD)10min答案:B解析:10.[单选题]两机动船对驶最容易产生两船行动不协调的是_________ 。
《航海雷达与ARPA》复习题
《ARPA》复习题一.选择题第一章绪论1.1、在ARPA中的一个主要参数TCPA用来表示:A、会遇距离B、会遇时间C、最小会遇距离D、最小会遇时间2.2、在ARPA,本船与目标船之间碰撞危险的紧迫程度可用下列哪一种来表示。
A、CPAB、TCPAC、PPCD、PAD3.3、ARPA可提供的目标六个运动和避碰数据是:A、本船航向、航速、目标航向、航速、距离、方位B、本船航向、航速、目标航向、航速、CPA、TCPAC、目标相对航向、航速、距离、方位、CPA、TCPAD、目标真航向、真航速、距离、方位、CPA、TCPA4.4、习惯上,常将DCPA简称为CPA,它表示预测的目标到最接近本船的_______。
A、时间B、距离C、位置D、方向5、人工标绘的条件是,在标绘期间:A、目标保速保向,本船保速B、目标保速保向,本船保向C、目标和本船都需保速保向D、目标和本船都不需保速保向6、若目标船的R.M.L通过本船的MINCPA圈,则此目标为危险船,驾驶员应该_______。
A、立即下舵令,进行避让B、马上进行试操船,求得最佳避让方案,接着采取措施C、由于ARPA有误差,试操船又是一种数学模拟所以不要相信ARPAD、如果TCPA小于MINTCPA,则说明目标为非常危险船,应立即采取避让措施7、人工标绘中,设置CPA安全界限的依据是:A、当时的航行态势B、本船的吨位,速度机动性,装载等情况C、两船安全通过必须有一定距离D、以上各项8、若人工绘不能满足一定条件,则原先作的图作废,这些条件是:A、本船保速保向B、目标保速保向C、同时满足上述A、B二条D、作图过程中上述A、B二条不必同时满足9、在转向频繁的狭水道中航行,应选用的显示模式是:A、航向向上B、北向上C、船首向上D、随意10、使用雷达观测定位时最好选用:A、对水真运动显示B、对地真运动显示C、船首向上相对运动显示D、北向上相对运动显示11、在使用雷达进行标绘时,应该选用:A、北向上相对运动显示方式B、船首向上相对运动显示方式C、航向向上相对运动显示方式D、对水真运动方式12、在下述几种ARPA图像指向显示模式中,哪种说法不对?A、船首向上(HEAD UP)图像不稳B、北向上(NORTH UP)图像稳定C、航向向上(COURSE UP)图像稳定D、航向向上船首线始终指0度第二章 ARPA系统的组成及工作概况1、现在大多ARPA都采用:A、实时显示B、非实时显示C、由操作者按需选择D、由用户在购置时指定2、ARPA的PPI之所以能实现高亮度显示是因为:A、加快径向扫描速率B、加快天线旋转速度C、采用非实时扫描方式D、提高了雷达的分辨力3、在ARPA给出的下列绪数据中,操作者经常最关心的是:A、目标的距离、方位B、目标的航向、速度C、本船的航向、速度D、CPA、TCPA4、预置ARPA输入的信号和数据应是:A、由操作者任意确定预置内容B、预置本船航向、航速及安全判据数据C、预置本船航向数据D、预置本船航速数据5、使用ARPA功能前,操作者应做到:A、按正确步聚调整好雷达B、预置ARPA所需的输入信号和数据C、选好ARPA使用的量程D、上述各项都应做6、使用ARPA功能时,对航速数据的要求是:A、因避碰应用是主要的,故只要输入本船对水航速B、任何时候只需输入本船对地航速C、导航时输入对地航速,避碰时输入对水航速D、任意7、ARPA对传感器原始信号进行预处理的目的是:A、视频信号量化,抑制杂波B、罗经信号数字化C、计程仪信号数字化D、A+B+C8、用于ARPA系统中输入接口的主要用途是:A、放大传感器信号的幅度B、使输入到ARPA的各种传感器信号极性合适C、使各传感器模拟信号变成计算机可接受的数字信号D、使各传感器模拟信号匹配9、本船电罗经有故障时,则:A、ARPA不能启动B、RADAR不能使用C、ARPA和RADAR均可照常使用D、ARPA的功能不执行10、本船计程仪有故障时,则:A、ARPA照常可使用B、RADAR不能使用C、RADAR照常可使用,但ARPA不能使用D、RADAR和ARDA都不能使用11、在ARPA中,PAD的含义是在下述哪个条件下,两船可能发生碰撞的区域?A、目标船和本船均保向保速时B、目标船保向保速,本船保速时C、本船保向保速、目标船保速时D、目标船保向保速,本船保向时12、在ARPA中,若海区有风流时输入对水速度,则其显示的真矢量代表:A、长度为对水真速度,方向为船首向B、长度为对地速度,方向为航迹向C、长度为对水真速度,方向为航迹向D、长度为对地真运动,方向为船首向13、雷达向ARPA提供的基本信息是:A、回波原始视频信号,触发脉冲、雷达天线角位置信号及船首线信号B、目标的位置信息,航向信息,速度信息C、目标的方位信息,目标距离信息,船首线信息D、触发脉冲信息,天线位置信息,航程信息14、电罗经向ARPA提供的基本信息是:A、本船的航向信息B、目标的航向信息C、目标的相对方位信息D、目标的真方位信息15、计程仪向ARPA提供的基本信息是:A、目标的航速信息B、本船的航速信息C、本船的相对航速信息D、目标的航程信息16、对输入ARPA的原始视频信号预处理包括以下内容:A、抑制杂波和信号量化B、对原始信号进行放大C、A+B对D、A+B错17、在ARPA的PPI综合显示器上,每一被跟踪的目标将出现一根矢量,矢量的长度表示在设定的矢量时间内:A、目标的运动方向B、目标的运动距离C、目标的运动速度D、目标的运动数据18、被跟踪目标出现的矢量的终端表示经过设定的X分钟后,目标将到达的:A、方向B、距离C、时间D、位置19、当将模拟天线角位置信号变成数字信号时,若要求最低位代表0.088度,那么,需用多少位二进制数字:A、11位B、12位C、13位D、14位20、在狭水道中,本船和目标船机动频繁,这时:A、ARPA不再显示PPC或PADB、由于破坏了ARPA对PPC、PAD的计算准则,因而造成画面杂乱,报警频繁C、ARPA因PPC和PAD失效而不能正常工作D、ARPA图像与在开阔海域时一样21、ARPA的传感器包括:A、高质量船用雷达B、电罗径C、速度计程仪D、以上各项22、矢量型ARPA与PAD型ARPA相比,有下列哪种特点:A、检测目标的精度较高B、显示画面较清晰C、通过试操船才能求得安全航速和安全航向D、以上各项23、在ARPA中,若海区有风流时输入对地速度,则其显示的真矢量代表:A、长度为对水真速度方向为船首向B、长度为对地真速度,方向为航迹向C、长度为对水真速度,方向为航迹向D、长度为对地真速度,方向为船首向24、ARPA用于导航时,本船适用工作模式应为_______:A、真矢量B、相对矢量C、对水速度D、对地速度25、下列哪一种不是ARPA所需的原始输入信号?A、视频回波B、罗经航向C、电子方位线D、天线角位置26、ARPA在执行避碰功能时要输入________速度,导航功能输入____速度。
航海雷达与ARPA.
3.雷达为何采用中频电源 1)避免其他低频电源干扰 2)船电负载多,变化大,电压不稳 3)防止各类高频干扰(互相干扰,中频电源隔离久) (雷达电源克服上述问题,满足radar的要求,显然要满足一定的技术
要求,下面谈一谈这些技术指标。) 4.主要技术要求 1)船电变化±20%,中频电源输出电压变化±5%。(稳压,雷达的要
求) 2)能24小时连续工作,适应温差大,温度高,盐雾重的环境。(雷达
工作环境的要求) 3)中频电源频率为400~2000度。(量程的要求,因触发与中频电频率
同)
(电源之后,全机最基本的单元为触发(从显示器反向说明基本性), 本单元虽简单,但为全机时钟,很重要,下面分析之。)
第三节 雷达发射机
去天线
中频电源
触发脉冲产 生器
①
预调制器
去去 接显 收示 ② 机器
调制器 ③
磁控管 ④
低压 电源
自
动
发
延
射
时
开
开
关
关
收发机险丝 高压保险丝
中频电源
特高压
门
电源
开
关
去接收机
5)调制器波形: 波形好:主要指前沿陡,后沿陡,顶部平坦。 3:磁控营 1):磁控营的作用及输入输出信号 磁控营的作用:在调制器输出的负高压作用下,产生矩形调制的微 波振荡脉冲。
船电
起动器 整流器
保护电路
功放
中频电源
控制功率
控制频率
调压器
方波产生器
2.中频变流机组
1)基本原理及组成: 电动机带动发电机转动,使发出的电的频率和电压值,恰为雷达中频电源所需的
集美大学航海雷达与ARPA》试题集Word版
《航海雷达与ARPA》试题集一、选择题第一章雷达基本工作原理01012001(4)A船用雷达属于哪一种类型的雷达? ____A、脉冲B、多普勒C、连续波D、调频01012002(4) B船用雷达测距原理是测量电磁波在天线与目标之间的______。
A、传播速度B、往返传播时间C、传播次数D、往返传播时的频率变化01012003(6) B某径向扫描雷达的量程为24 n mile,那么其扫描线全长代表的时间为。
A、590.4 usB、295.2 usC、300.0 usD、600.0 us01012004(6) B雷达测得电波在天线与物标之间的往返时间为36.9us, 则该物标到本船的距离为。
A、6 n mileB、3 n mileC、4 n mileD、5 n mile01012005(5) D雷达的测距原理是利用电波的以下特性____A、在空间匀速传播B、在空间直线传播C、碰到物标具有良好反射性D、以上都是01012006(6) D雷达测方位原理是利用_____特性。
A、雷达天线定向发射和接收B、雷达天线360˙旋转C、雷达天线与扫描线同步D、以上都是01022001(5) A雷达发射机产生射频脉冲,其特点是_____。
A、周期性大功率B、周期性小功率C、连续等幅小功率D、连续等幅大功率01022002(5) C雷达之所以能够发射和接收共用一个雷达天线, 是因为.A、雷达天线是定向天线B、雷达天线是波导天线C、收发开关的转换作用D、雷达天线用波导传输能量01022003(4) B雷达天线其转速通常为.A、80转/分B、15-30转/分C、120转/分D、90转/分01022004(4) C雷达显示器为了得到完整的图像, 其荧光屏采用-A、短余辉B、中余辉C、长余辉D、超长余辉01022005(4) B雷达显示器是PPI显示器, 可以测得物标的二维数据,即A、距离和高度B、距离和方位C、大小和高度D、方位高度01022006(5) D雷达射频脉冲与物标回波相比.A、二者功率相同, 频率相同B、二者功率不同, 频率不同C、二者功率相同, 频率不同D、二者功率不同, 频率相同01022007(5) B雷达电源 .A、就是船电B、由船电转换而成C、是中频电源, 由高频用电设备转换而成D、A或B 01022008(4) C船用雷达发射机的任务就是产生一个功率较大的_____脉冲.A、连续波B、调频C、射频D、调幅01022009(4) D船用导航雷达使用的频率属于下列哪个波段? _____A、LB、XC、SD、X和S01022010(5) C雷达接收机一般都采用____式接收机.A、再生B、直放C、超外差D、阻容耦合01032001(5) C雷达电源应在船电电压变化----的情况下,输出的中频电位变化应小于5%.A、±10%B、±15%C、±20%D、±25%01032002(6) B简单判断雷达逆变器工作是否正常的方法是____A、用耳听不到振动声B、听到清晰均匀的振动声C、听到时断时续的振动声D、用手摸不发热01032003(4) B一般雷达电源都采用_____电源。
大学航海学考试练习题及答案311
大学航海学考试练习题及答案31.[单选题]东方位标的涂色为()。
( )A)上黑下黄B)上黄下黑C)黑黄黑横纹答案:C解析:2.[单选题]以天顶、天底为起、止点且通过西点的半个大圆称__________。
A)天体时圈B)天体垂直圈C)东圈D)西圈答案:D解析:3.[单选题]半圆方向60NE换算成圆周方向为____________(A)60B)120C)300D)060答案:D解析:4.[单选题]根据雷达性能标准 MO MSC192(79)要求,雷达跟踪目标3min后参数CPA的精度必须要达到多少?( )A)0.InmileB)0.2nmileC)0.3nmileD)0.4nmile答案:C解析:5.[单选题]船舶积载时,主要考虑的船舶强度为:A)局部强度B)纵强度C)纵强度和局部强度D)横强度和局部强度6.[单选题]某天体上中天时,其半圆方位角等于 ,位置角等于____。
A)0°/180°B)180°/ 180°C)0°/0°D)90°/180°答案:A解析:7.[单选题]天体上中天时,其位置角等于____ 。
A)0°或 180°B)180°或 90°C)90°D)0 °或 90°答案:A解析:8.[单选题]舷灯的水平显示范围为_________ 内。
A)115.5度B)从船的正前方到每一舷正横前22.5度C)从船的正前方到各自一舷正横后22.5度D)从船的正前方到各自一舷正横前22.5度答案:C解析:9.[单选题]某轮从(1030’S、11530’W)航行到(2030’S、13030’W),则应驶的恒向线航向为:A)@124.7B)@ 235.3C)@ 304.7D)@055答案:B解析:10.[单选题]墨卡托航法最可能出现较大误差是在:( )A)低纬度海区B)中纬度海区C)高纬度海区D)与纬度无关答案:C解析:A)从该物标的南方14海里所看到的形状B)从该物标的北方14海里所看到的形状C)从本船向南14海里所看到的形状D)从本船向北14海里所看到的形状答案:B解析:12.[单选题]下列叙述中 是错误的?A)磁差以真北为基准开始度量B)罗经差以真北为基准开始度量C)电罗经差以真北为基准开始度量D)自差以真北为基准开始度量答案:D解析:13.[单选题]雷达上的旁瓣回波位于真回波的( )。
航海雷达试卷答案
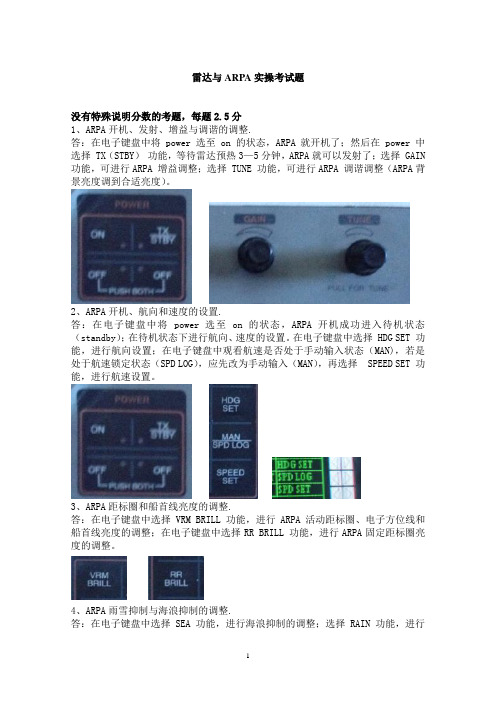
雷达与ARPA实操考试题没有特殊说明分数的考题,每题2.5分1、ARPA开机、发射、增益与调谐的调整.答:在电子键盘中将 power 选至 on 的状态,ARPA就开机了;然后在 power 中选择 TX(STBY)功能,等待雷达预热3—5分钟,ARPA就可以发射了;选择 GAIN 功能,可进行ARPA 增益调整;选择 TUNE 功能,可进行ARPA 调谐调整(ARPA背景亮度调到合适亮度)。
2、ARPA开机、航向和速度的设置.答:在电子键盘中将 power 选至 on 的状态,ARPA开机成功进入待机状态(standby);在待机状态下进行航向、速度的设置。
在电子键盘中选择 HDG SET 功能,进行航向设置;在电子键盘中观看航速是否处于手动输入状态(MAN),若是处于航速锁定状态(SPD LOG),应先改为手动输入(MAN),再选择SPEED SET 功能,进行航速设置。
3、ARPA距标圈和船首线亮度的调整.答:在电子键盘中选择 VRM BRILL 功能,进行ARPA活动距标圈、电子方位线和船首线亮度的调整;在电子键盘中选择RR BRILL 功能,进行ARPA固定距标圈亮度的调整。
4、ARPA雨雪抑制与海浪抑制的调整.答:在电子键盘中选择 SEA 功能,进行海浪抑制的调整;选择 RAIN 功能,进行雨雪抑制的调整。
5、ARPA量程与脉冲宽度的调整.答:在电子键盘中选择 RANGE 量程功能,进行ARPA量程的调整;选择 PULSE WIDTH 功能,进行脉冲宽度的调整(宽脉冲或窄脉冲)。
6、ARPA固定距标圈和活动距标圈的隐显.答:在电子键盘中选择RR BRILL 功能,进行ARPA固定距标圈的显隐的操作;在电子键盘中选择VRM功能,进行活动距标圈的显隐的操作。
7、ARPA背景亮度的调整.答:在电子键盘中选择 BACK GRND 功能,进行ARPA背景亮度的调整。
8、ARPA真运动与相对运动的切换.答:在电子键盘中选择 RM|TM 功能,进行ARPA真运动与相对运动的切换。
大学航海学考试(习题卷6)

大学航海学考试(习题卷6)第1部分:单项选择题,共259题,每题只有一个正确答案,多选或少选均不得分。
1.[单选题]英版海图(额定光力射程)上某灯塔的灯质为FL(2)4S49m24M,测者眼高为16米,则能见度为12海里时:该灯塔灯光的最大可见距离为_________A大于24n mileA)@小于24nB)@ 等于23nC)@ 小于23n答案:C解析:2.[单选题]国产索星卡和星图底板上标有 ______ 。
A)太阳的大概位置B)月亮的位置C)行星的位置D)金星的位置答案:A解析:3.[单选题]在船舶纬度和速度变化时,有关重新调整陀螺罗经的纬度误差和速度误差旋钮的说法正确的是( )。
A)根据船舶的瞬时纬度和航速进行调整B)每当纬度变化1°,航速变化1kn调整一次C)每当纬度至多变化5°,航速至多变化5km调整一次D)对纬度和航速的变化无具体要求第十节光纤罗经答案:C解析:4.[单选题]下列浮标中,反射雷达波较好的是( )。
A)球形浮标B)锥形浮标C)细枪形浮标D)柱形浮标答案:D解析:5.[单选题]静态相对定位精度达到厘米级的差分GPS是( )。
A)位置差分GPSB)伪距差分GPSC)载波相位差分GPSD)广域增强差分GPS答案:C解析:B)大小相等C)性质相同D)非铁磁校正器答案:D解析:7.[单选题]太阳真出没时,太阳真高度为__________,此时观测太阳下 边离水天线的高度约为__________太阳直径。
A)2/3,0B)2/3,-55′C)0,1/3D)0,2/3答案:D解析:8.[单选题]观察ECDS显示,设备显示的AIS目标③为( )。
A)休眠目标B)激活目标C)被选目标D)危险目标答案:D解析:C)10分钟;2分钟D)2分钟;30分钟答案:A解析:10.[单选题]太阳由南天半球运动到北天半球时,其轨道(黄道)与天赤道的交点称为____ 。
A)春分点B)冬至点C)秋分点D)夏至点答案:A解析:11.[单选题]“倍角法”和“四点方位法”是用来:A)@测定船位误差B)@ 船舶避险C)@ 求实际航迹向D)@测定船位答案:D解析:12.[单选题]某船真航向090,海区风N风转NW风,风力不变,则船舶风压差________。
大学航海学考试(习题卷9)

大学航海学考试(习题卷9)第1部分:单项选择题,共98题,每题只有一个正确答案,多选或少选均不得分。
1.[单选题]纬度是以______作为基准线计量的(A)赤道B)等纬圈C)格林经线D)测者经线答案:A解析:2.[单选题]AIS协助雷达避碰时也存在局限性,下列说法错误的是( )。
A)AIS图标标识会遮住弱小目标,影响观测B)AIS信息量大,界面复杂,增加了操作难度C)AIS也存在漏失目标的情况D)AIS目标没有试操船功能答案:D解析:3.[单选题]天体周日视运动中,不同赤纬的天体其周日视运动的周期是 。
A)相同B)赤纬低的天体周期短C)赤纬高的天体周期短D)不同答案:A解析:4.[单选题]太阳周年视运动的方向是____。
A)自东向西B)自西向东C)自北向南D)自南向北答案:B解析:5.[单选题]在雷达稳定跟踪目标的过程中,驾驶员改变了雷达杂波抑制状态,被跟踪目标( )。
A)可能发生目标交换B)可能发生目标丢失C)发生“角向肥大”现象D)出现假回波答案:B解析:6.[单选题]船舶定线制的主要内容之一是()。
( )A)分隔反向或接近反向的交通流B)分隔同向或接近同向的交通流C)分隔小角度交叉相遇的交通流D)分隔各转向点附近的交通流答案:A解析:7.[单选题]从雷达荧光屏上出现的海浪干扰回波中识别物标回波的主要依据是( )。
A)海浪回波强,物标回波弱B)海浪回波弱,物标回波弱C)海浪回波小,物标回波大D)物标回波稳定,少变化答案:D解析:8.[单选题]对水航程是__________(A)船舶在仅仅受到风的影响下的对水航程B)船舶在仅仅受到流的影响下的对水航程C)船舶在各种风流情况下的对水航程D)船舶在各种风流情况下的对地航程答案:C解析:9.[单选题]锚设备的检查保养分为:①日常检查保养;②特别检查保养;③定期检查保养。
A)①、②B)①、③C)②、③D)①、②、③答案:B解析:10.[单选题]自动舵的舵角调节旋钮是用来调节:A)开始工作的偏航角B)纠正偏航的舵角大小C)反舵角大小D)偏出一个固定舵角大小答案:B解析:11.[单选题]首柱按制造方法的不同,可分为:①钢板焊接首柱;②铸钢首柱;③混合型首柱。
航海雷达_简答题
1试述雷达测距、测方位原理利用电磁波特性:直线传播(微波波段)匀速传播(同一媒质中)反射特性(在任何两种媒质的边界面)测距:通过无线电信号往返时间的精确测量,并在雷达显示器内设置一个计时系统实现测距。
公式:s=(c*Δt )/2物理量:s 物标离天线的距离;c 电磁波在空间的传播速度,c=300m/us ;Δt 无线电波往返于雷达天线与物标之间的时间示意图:测方位:在天线缓慢旋转时测量反射信号的最大幅度,即当在某个方向收到物标回波时,只需记下此时的天线方向就可知道物标的方向了。
示意图:2.试画出船用雷达基本组成框图,并说明各部分的作用框图:1)触发电路:每隔一段时产生一个尖脉冲,同时送到发射机、接收机、显示器三部分,使它们同步工作。
(触发电路决定工作开始的时间)2)发射机:触发脉冲到来后,立刻产生一个大功率,微波波段,具有一定宽度345673.发射机由哪些部分组成?各部分作用是什么?船电⑴触发脉冲产生器:相当于时钟电路,使雷达各部分同步工作。
⑵调制器及预调制器:触发脉冲一到,预调制器输出具有一定宽度、一定幅度的正极性矩形控制脉冲去控制调制器,使调制器产生具有一定宽度、一定幅度的负极性高压矩形脉冲加到磁控管的阴极。
⑶磁控管振荡器:在调制脉冲的作用下产生超高频振荡,经波导送至天线向外辐射。
⑷发射机电源:高压电源部件保证磁控管再加高压前有3~5min的预热时间,保护磁控管阴极性能;低压电源部件为接收机提供除特高压外的所有交、直流电源。
4.磁控管正常工作的外部条件是什么?如何检查磁控管的好坏?⑴工作条件①灯丝加交流电压,加热阴极到一定温度使其发射电子;②阴极与阳极之间加高压。
工作时阴极接地,阳极上加负极性1万余伏的高压——调制脉冲;③输出负载阻抗匹配,保证功率和频率稳定。
⑵检查方法①未通电:万用表测灯丝电阻几Ω,再用兆欧表测阳极—阴极间绝缘电阻大于200ΜΩ;②通电:ⅰ检查磁控管电流值为规定值,磁控管工作正常。
航海雷达与ARPA
接收机
显示器
β 天线的辐 射方向 (很尖锐) 实际的 船首 线
船舶天线俯视图
5 控制雷达整机同步工作的是____。
A 电源 B 扫描电路 C 触发脉冲 D
收发开关
6 正常开启雷达,设雷达一切电压正常,但发射机 不工作,荧光屏上没有扫描线,应首先
查____。
A 各种保险丝 B 发射机 C 显示器 D 触
雷达电源应在船电电压变化____的情况 下,输出的中频电位变化应小于士5%。 A 士10% B 士15% C 士20% D 士25%
船用雷达需要的电源电压为: A直流11O伏 B交流22O伏 C交流380伏 D中频交流电
第三节 雷达发射机 一、主要组成及各部分作用
1:触发脉冲产生器: 产生触发脉冲,使雷达各部分同步工作。
(波长)
X波段 —(9300~9500)MHZ — 3cm (波长)
一万伏左右 矩形包洛
超高频振荡脉冲
磁控营 输入
载波(微波) 有几十个振荡周期, 周期个数,要保持 恒定。
磁控营 输出
5.4):工作状态判断: 磁控管正常工作时,
有稳定的阳极电流,所以; 能够输出稳定的大功率微 波,氖灯遇大功率微波辐 射会发亮。
阴极: 内含灯丝 (加热阴极)
微波输出装置
5.6):老练
“老练”是更换磁控管时, 为确保设备安全,要进行的一个 步骤。
什么是 “打火” 磁控管空腔内为真空,如果
空腔内有气体,高压会使气体电 离,就会有负离子飞向阳极,形 成阳极电流,这一现象称为“打 火”。
阳极
空腔
什么是 “老练”
气体一下子全部电离,就会 有大量负离子飞向阳极,形成很 大的阳极电流,会损伤阳极。
《ARPA》习题集

《ARPA》习题集一、选择题1、在转向频繁的狭水道中航行,应选用的显示模式是( )A.航向向上B.北向上C.船首向上D.随意2、使用雷达观测定位时最好选用( )A.对水真运动显示B.对地真运动显示C.船首向上相对运动显示D.北向上相对运动显示3、航向向上图像显示方式的优点是( )A.便于判别相遇船在本船的左舷还是右舷B.当航向为180°时,图像画面显得直观C.当本船改向时,首线偏离0°,但图像稳定D.A+B+C4、在使用雷达进行标绘时,应该选用()A.北向上相对运动显示方B.船首向上相对运动显示方式C.航向向上相对运动显示方式D.对水真运动显示方式5、在下述几种ARPA图像指向显示模式中,哪能种说法不对( )A.船首向上(HEAD UP )图像不稳B.北向上(NORTH UP)图像稳定C.航向向上(COURSE UP)图像稳定D.航向向上,船首线始终指0°6、ARPA可提供的目标六个运动和避碰数据指( )A.本船航向、航速、目标航向、航速、距离、方位B.本船航向、航速;目标航向、航速,CPA.TCPAC.目标相对航向、航速、距离、方位,CPA.TCPAD.目标相对航向、真航速、距离、方位,CPA.TCPA7、在ARPA中的一个主要参数TCPA用来表示( )A.会遇距离B.会遇时间C.最小会遇距离D.最小会遇时间8、在ARPA中,本船与目标船之间碰撞危险的紧迫程度可用下列哪一种来表示( )A.CPAB.TCPAC.PPCD.PAD9、ARPA对传感器原始信号进行预处理的目的是( )A.视频信号量化,抑制杂波B.罗经信号数字化C.计程信号数字化D.A+B+C10、对输入ARPA的原始视频信号预处理包括以下内容( )A.抑制杂波和信号量化B.对原始信号进行放大C.A+B对D.A+B错11、ARPA自动跟踪目标的过程是( )A.小波门------中波门-------大波门-------稳定跟踪B.中波门----大波门----小波门----稳定跟踪C.小波门----大波门------中波门-----稳定跟踪D.大波门---中波门-----小波门------稳定跟踪12、ARPA录取目标所饮食的内容是( )A.录取目标的初始位置B对录取目标连续自动跟踪 C.对录取目标进行计算和危险判断 D.以上各项13、人工录取目标的原则是( )A.首先录取船首方向,特别是右舷的近距离目标B.先近后远C.先正横后两舷D.以上各项14、ARPA自动录取目标的优点是( )A.首先录取船首方向,特别是右舷近距离目标B.自动清除不需要的目标C.录取目标速度快D.A+B+C15、ARPA自动录取中“限制区”的意义是( )A.优先录取区B.拒绝录取区C.自动录取区D.人工独录取区16、ARPA设置警戒圈自动录取方式后,目标信号第一次出现已在警戒圈内会( )A.自动报警,录取和跟踪B.自动报警,可立即人工录取C.不报警,只录取和跟踪D.不报警,不录取17、利用警戒圈进行自动捕捉时,ARPA能捕获的物标是---------的目标( )A.对本船有危险B.正在闯入警戒圈C.位于警戒圈内D.在警区圈外18、相对矢量方式适用于下列那种场合( )A.需要迅速作出正确的避让决策时B.需要快速判断本船与所有目标船有否碰撞危险时C.需要从屏上看清目标船真航向,真速度时D.需要从屏上看清本船真航向,真航速时19、真矢量显示方式适用于下列那种场合( )A.需要迅速作出正确的避让决策时B.需要快速判断本船与所有目标船有否碰撞危险C.需要从屏上估算出CPA.TCPA时D.需要从屏上看出目标是否发生了机动时20、在ARPA的PPI综合显示器上,每一被踊跃的目标将出现一根矢量,矢量的长度表示在设定的矢量时间的内( )A.目标的运行方向B.目标的运动距离C.目标的运动速度D.目标的运动数据21、被踊跃目标出现的矢量的终端表示经过设定的X分钟后目标将到达的( )A.方向B.距离C.时间D.位置22、判断目标是否机动,可根据( )A.目标真矢量变化B.目标尾迹C.时间D.本船航迹23、ARPA荧屏上端有一具大“T”显示,说明处于( )A.真运动状态B.相对运动状态C.试操船状态D.故障状态24、当ARPA进行试操船时,必须能够( )A.模拟本船避让后的效果B.本船真矢量线C. 有明确的试操船状态表示符D . A+B+C25、ARPA执行试操船时--------指示试操船航向( )A.相对矢量线 B .本船真矢量线 C. 电子方位线. B或C,但根据实际机型而定26、以下哪种报警属于ARPA工作报警( )A. 碰撞报警B.目标丢失报警C.捕捉目标总数超过一定数目报警D.都是27、以下哪种报警属于ARPA“系统报警”( )A.目标闯入警戒圈报警B.CPA,TCPA报警C.数据显示器故障报警D. A+B+C28、ARPA系统报警中级别最高的报警是-------报警( )A. CPA/TCPAB.电源故障C.接口故障D.数据显示故障29、1690荧屏显示被跟踪目标被一个闪烁的“△”套住,说明该目标的CPA和TCPA值( )A. CPA值小于所设定值 B .TCPA值小于所设定值 C.两者均小于所设定值 D.两者均大于所设定值30、不能过分信赖试操船的主要原因是ARPA没有考虑( )A. 计算误差 B .目标船改速改向 C .雷达很差 D .本船操纵性能31、ARPA在执行工作报警时,若同时出现一个以上报警情况,则只能按优先程序报警,下列哪种报警最优先( )A.目标丢失B. 目标闯入警戒区(圈)C. CPA和TCPA小于预置的安全界限D .目标航迹变化32、ARPA的自动报警功能存在局限性,造成漏警的目标可能是( )A.弱小目标B.突然出现的目标(如潜艇)C.超过录取容量而未被录取的目标D.以上三者都可能33、为提高ARPA自动录取目标的目的性和速度,当选用自动录取功能时,驾驶员可作下列哪种操作()A.设置优先区 B.设置导航线 C.设置限制区(线)或警戒区(圈)D.A,C均可34、近距离范围内目标发生急剧的方位变化,将可能使ARPA作产生下列哪种现象()A.目标交换B.目标丢失C.跟踪精度下降D.碰撞危险报警35、在ARPA中,目标船和本船是否存在碰撞危险的判据是()A.PPCB.PADC.MINCPA和MINTCPAD.目标船的相对运动线是否穿过本船36、在ARPA显示屏上,当本船首线穿过目标船的PAD时表示()A.目标船将从本船前方穿越,无碰撞危险B.本船与目标船有可能发生碰撞C.本船保速保向,与目标船一定碰撞D.目标船已从本船前方穿越,无碰撞危险37、在ARPA显示屏上出现二个PAD重叠,则表示()A.这二条目标船之间有碰撞危险B.这二条目标船和本船都存在碰撞危险C. 这二条目标船和本船均无碰撞可能D.以上三种说法都不对38、两个被跟踪的目标发生目标交换的条件是()A.两目标交会B.两目标对遇C.两目标同向行驶D.两目标靠近,使其回波同时进入跟踪窗内39、在ARPA中,PAD的含义是在下述哪个条件下,两船可能发生碰撞的区域()A.目标船和本船均保向保速时B.目标船保向保速,本船保速时C.本船保向保速,目标船保速时D.目标船保向保速,本船保向时40、ARPA设置CPA安全界限的依据是()Ⅰ、船舶具有一定的体积Ⅱ、两船安全通过必须有一定距离Ⅲ、设备本身的误差Ⅳ、海域开阔程度A.ⅠⅡⅢB. ⅡⅢⅣC.ⅠⅢⅣD. ⅠⅡⅣ41、PERRY CAS(II)在-----情况下,物标有可能产生两个PAD区()A.本船船速与物标船速相同B. 本船船速比物标船速快C.本船船速比物标船速慢D.A+B42、确定PAD图形的条件是本船保速目标保速保向,因而PAD适用于()A.船舶密度小的开阔海域B.船舶密度大的港口水域C.不出现PPC的场合D.因避让机动频繁的场合43、雷达向ARPA提供的基本信息是()A.回波原始视频信号,触发脉冲,雷达天线角位置信号及船首线信号B.目标的位置信息,航向信息,速度信息C.目标的方位信息,目标距离信息,船首线信息D.触发脉冲信息,天线位置信息,航程信息44、电罗经向ARPA提供的基本信息是()A.本船的航向信息B.目标的航向信息C.目标的相对方位信息D.目标的真方位信息45、计程仪向ARPA提供的信息是()A.目标的航速信息B.本船的航速信息C.本船的相对航速信息D.目标的航程信息46、现在很多ARPA都采用()A.实时显示B.非实时显示C.由操作者按需选择D.由用户在购置时指定47、某ARPA用相对运动,相对矢量显示模式,若荧光屏上仅有某一目标的尾迹与矢量线的方向不一致,则可说明()A.本船转向或变速了B.本船转向了C.目标船转向或变速了D.目标船转向了48、某ARPA用相对运动,相对矢量显示模式,若本船改向或变速,则在荧光屏上可见到()A.仅有某一目标的尾迹与矢量线方向不一致B.所有目标的尾迹与矢量线方向不一致C.屏上所有图像状态不变D. 屏上所有图像状态不变,仅有本船矢量线移动49、某ARPA用真运动,真矢量显示模式,若本船改向,则在荧光屏上可见到()A.所有矢量均变B.所有矢量均不变C.目标船矢量不变,本船矢量方向变D.目标船矢量长度不变,但方向变50、某ARPA用真运动,真矢量显示模式,当发现屏上某目标的矢量方向与尾迹不一致,而其他目标的矢量尾迹与方向仍保持一致时,则可说明()A.本船改向B.本船变速了C.该目标改向了D.该目标变速了51、某ARPA用相对运动,真矢量显示模式,若荧光屏上目标尾迹与矢量线方向不一致,则可说明()A.本船改向或变速了B.目标船改向或变速了C.本船或目标船均未改向或变速D.不能肯定是本船或是目标船改向或变速52、当ARPA发出碰撞危险报警时,则表明本船与目标船之间()A.立即发生碰撞B.CPA和TCPA值为零C.CPA或TCPA小于预设值D.CPA或TCPA均小于预设值53、当一被跟踪目标被取消跟踪后,在ARPA显示上将发生()A.目标的矢量和尾迹均消失B.目标的回波亮点消失C.目标的尾迹消失而矢量仍显示D.目标的矢量仍显示而尾迹消失54、当一被跟踪目标被录取跟踪后,在ARPA显示上将发生()A.目标丢失B.目标交换C.漏跟踪D.拒绝跟踪55、ARPA的跟踪窗(波门)的大小,在整个跟踪过程中()A.一直是固定不变的B.起始跟踪时大,稳定跟踪后小C. 起始跟踪时小,稳定跟踪后大D.其大小由操作者酌情选定56、在ARPA中,目标的历史航迹点一般是用来()A.判断目标是否有碰撞危险B.复核避让的目标是否让清C.估计跟踪的船是否机动D.核查本船采取的措施是否有效57、使用ARPA录取目标时应注意()A.人工录取和目标录取可任选B.按照先首向,近距,特别是右舷目标的录取原则C.自动录取存在最近距离的局限性D、以上各项58、为判断来船态势,可以利用的ARPA动态符只是()A.相对矢量B.真矢量C.可能碰撞点或预测危险区D.以上三项可酌情选定59、用ARPA矢量时间可调的功能,在估计碰撞危险时,下述哪种情况有碰撞危险()A.本船相对矢量与目标船相对矢量相交B.本船真矢量与目标船真矢量相交C.本船真矢量与目标真矢量的矢端重叠D. 本船相对矢量与目标船相对矢量的矢端重叠60、用PAD估计碰撞危险时,下述哪种情况有碰撞危险( )A.本船航向线与PAD相交 B.二个PAD重叠C.只要屏上出现PADD.PAD与本船相对矢量相交61、矢量时间可调的意义在于( )A.用相对矢量时,可预测目标位置B.用真矢量时,可预测目标及本船的位置C.便于直观判断碰撞的可能性D.以上三项都对62、使用ARPA试操船功能时,应特别注意( )A.此时显示的是模拟试操船的预测图像而非实际的航行态势图B.试操船要抓紧时间尽快完成C.试操船仅对跟踪的目标有效D.以上三项均应特别注意63、判断ARPA试操船效果的依据是()A.目标真矢量与本船真矢量不相交B.目标相对矢量不通过本船C.碰撞危险的警报解除D.PAD偏离本船航向线64、在ARPA对地真运动中,固定目标出现矢量的原因是()A.显示的本船航速与实际航速不等B.实际航速瞬时值不等C.已跟踪目标非点目标,其仅只漂移D. 上述三项65、本船真矢量与航向不一致的原因可能是()A.本船转向B.存在风流压差C.对地测速的参考目标选择不当D. 以上三项均可能66、在狭水道中本船和目标船机动频繁,这时()A.ARPA不再显示PPC或PADB.由于破坏了ARPA对PPC. PAD的计算准则,因而造成画面杂乱,报警频繁C.ARPA不能正常工作D.ARPA图象与在开阔海域一样67、ARPA具备报警系统,因此使用ARPA时,驾驶员的职责是()A.听到报警声立即去了望B.任何时候绝对不可忽视了望C.设置了安全判据后,驾驶员可离开岗位去处理其他业务D.以上三项均错68、若人工标绘不能满足一定条件,则原先作的图作废,这些条件是()A.本船保速保向B.目标保速保向C.同时满足上述A. B二条D.作图过程上述A. B二条不必同时满足69、ARPA的误差将直接影响避让行动的决断,ARPA的主要误差有()A.因为传感器及ARPA本身引入的和设备运动状态导致的设备误差B.因对雷达数据处理不精确引起的误差C.因人为因素导致的数据解析误差D.以上各项70、采用相对运动真矢量显示方式时,试操船是通过下列哪一项的观察来检查效果()A.目标船的真矢量变化B.本船的真矢量变化C.目标船的CPA和TCPA变化D.本船的相对矢量变化71、采用相对运动相对矢量显示方式时,试操船是通过下列哪一项的观察来检查效果的()A.本船的相对矢量变化B.本船的真矢量变化C.目标船的相对矢量变化D.将安全判据数值设置得大些,这样可以提高安全度72、利用ARPA录取目标功能时()A.自动录取方便、快速,因此应尽量选用自动录取B.手动录取速度虽慢,但可按需录取,因此应尽量选用手动录取C.自动录取目的性差又存在近距内限,因此一般不宜选用D.应根据航行环境态势,酌情选用录取模式73、本船电控罗经有故障时,则()A.ARPA不能启动B.RADAR不能使用C.ARPA和RADAR可照常使用D.ARPA的功能不执行74、本船计程仪有故障时,则()A.ARPA可照常使用B. RADAR不能使用C.RADAR照常可使用,但ARPA不能使用D. ARPA和RADAR都不能使用75、形成PPC的条件是()A.目标相对运动线通过本船B.目标保速保向C.本船保速D.以上各项76、一般在大海中,使用ARPA观察本船与目标船有无碰撞危险,通常选用下列哪种组合显示方式()A.相对运动,船首向上,真矢量显示方式B.相对运动,船首向上,相对矢量显示方式C.真运动,北向上,真运动显示方式D.真运动,北向上,相对矢量显示方式77、何时进行预制ARPA输入信号和数据的操作,下列哪种说法是正确的()A.雷达开机后B.打开ARPA计算机开关,等ARPA自检通过后C.ARPA开机后D.任何时候78、用于ARPA系统中输入接口的主要用途是()A.放大传感器信号的幅度B.使输入到ARPA的各种传感器信号极性合适C.使个传感器模拟信号变成计算机可接受的数字信号D.使各传感器信号匹配79、关于PPC,下列哪种说法是不正确的()A.PPC是当相对矢量穿过本船时,目标真矢量和本船航向线的交点B.PPC落在本船航向线上则有碰撞危险C.PPC是目标真矢量和本船真矢量的交点D.无PPC,则无碰撞危险80、关于ARPA的目标录取功能,下列哪种说法是不正确的()A.目标录取定义为需要跟踪目标的选择及其跟踪的开始B.目标录取的任务是目标初始距离,方位数据的录取并送入计算机C.目标录取可以有手动录取和自动录取二种方式D.一旦录取的操作完毕,该目标即被稳定跟踪81、当将模拟天线角位置信号变成数字信号时,若要求最低位代表0.088度,那么需用多少位二进制数字()A.11位B.12位C.13位D.14位82、在ARPA跟踪器中,目标实测位置是()A.检测到目标回波的波门的中心位置B.经过α-β滤波修正后的目标回波位置C.在波门内检测到的目标回波的重心位置D.A,B,C中的说法都不对83、在ARPA数据显示器上显示的目标位置是()A.检测到目标回波的波门的中心位置B.经过α-β滤波修正后的目标回波位置C.在波门内检测到的目标回波的重心位置D.A,B,C中的说法都不对84、在ARPA跟踪器中,新的波门位置是以下面哪个位置为中心设置的()A.从实测位置出发用实测速度预测的位置B.从实测位置出发用估值速度预测的位置C.从估值位置出发用估值速度预测的位置D.从估值位置出发用实际速度预测的位置85、各种型号ARPA的MOON值不同,因而检测性能也不同。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
《航海雷达与ARPA》试题集一、选择题第一章雷达基本工作原理01012001(4)A船用雷达属于哪一种类型的雷达? ____A、脉冲B、多普勒C、连续波D、调频01012002(4) B船用雷达测距原理是测量电磁波在天线与目标之间的______。
A、传播速度B、往返传播时间C、传播次数D、往返传播时的频率变化01012003(6) B某径向扫描雷达的量程为24 n mile,那么其扫描线全长代表的时间为。
A、590.4 usB、295.2 usC、300.0 usD、600.0 us01012004(6) B雷达测得电波在天线与物标之间的往返时间为36.9us, 则该物标到本船的距离为。
A、6 n mileB、3 n mileC、4 n mileD、5 n mile01012005(5) D雷达的测距原理是利用电波的以下特性____A、在空间匀速传播B、在空间直线传播C、碰到物标具有良好反射性D、以上都是01012006(6) D雷达测方位原理是利用_____特性。
A、雷达天线定向发射和接收B、雷达天线360˙旋转C、雷达天线与扫描线同步D、以上都是01022001(5) A雷达发射机产生射频脉冲,其特点是_____。
A、周期性大功率B、周期性小功率C、连续等幅小功率D、连续等幅大功率01022002(5) C雷达之所以能够发射和接收共用一个雷达天线, 是因为.A、雷达天线是定向天线B、雷达天线是波导天线C、收发开关的转换作用D、雷达天线用波导传输能量01022003(4) B雷达天线其转速通常为.A、80转/分B、15-30转/分C、120转/分D、90转/分01022004(4) C雷达显示器为了得到完整的图像, 其荧光屏采用-A、短余辉B、中余辉C、长余辉D、超长余辉01022005(4) B雷达显示器是PPI显示器, 可以测得物标的二维数据,即A、距离和高度B、距离和方位C、大小和高度D、方位高度01022006(5) D雷达射频脉冲与物标回波相比.A、二者功率相同, 频率相同B、二者功率不同, 频率不同C、二者功率相同, 频率不同D、二者功率不同, 频率相同01022007(5) B雷达电源 .A、就是船电B、由船电转换而成C、是中频电源, 由高频用电设备转换而成D、A或B 01022008(4) C船用雷达发射机的任务就是产生一个功率较大的_____脉冲.A、连续波B、调频C、射频D、调幅01022009(4) D船用导航雷达使用的频率属于下列哪个波段? _____A、LB、XC、SD、X和S01022010(5) C雷达接收机一般都采用____式接收机.A、再生B、直放C、超外差D、阻容耦合01032001(5) C雷达电源应在船电电压变化----的情况下,输出的中频电位变化应小于5%.A、±10%B、±15%C、±20%D、±25%01032002(6) B简单判断雷达逆变器工作是否正常的方法是____A、用耳听不到振动声B、听到清晰均匀的振动声C、听到时断时续的振动声D、用手摸不发热01032003(4) B一般雷达电源都采用_____电源。
A、低频B、中频C、高频D、直流01042001(6) A雷达定时器产生的脉冲是-----.发射机产生的脉冲是____A、触发脉冲, 射频脉冲B、发射脉冲, 视频脉冲C、触发脉冲, 视频脉冲D、发射脉冲, 触发脉冲01042002(5) C控制雷达同步工作的是----A、发射脉冲B、扫描方波脉冲C、触发脉冲D、固定距标脉冲01042003(6) D定时器产生的脉冲要同时送到___.A、发射机B、接收机C、显示器D、以上都是01042004(5) C雷达的定时脉冲延时的目的是____.A、提高距离分辨力B、提高方位分辨力C、提高测距精度D、提高测方位精度01052001(4) D有磁控管电流时, 下列哪项的结论是不恰当的.A、有特高压B、有特高压调制脉冲C、有触发脉冲D、肯定天线有辐射01052002(5) D判断雷达发射机工作是否正常的主要依据是.A、预游离电流B、晶体电流C、荧光屏上的噪斑D、磁控管电流01052003(5) B为延长雷达磁控管使用寿命,雷达的备用磁控管应.A、只在磁控管坏了时才使用B、经常轮换使用C、选一个好的备用管使用D、A和C01052004(5) B在雷达设备中, 三分钟自动延时电路的作用是A、保护显象管B、保护磁控管C、保护速调管D、使显示器与发射机同步工作01052005(6) D磁控管所需要的是脉冲.A、正向高压射频B、负向高压射频C、正向高压调制D、负向高压调制01052006(6) B当磁控管振荡器无灯丝电压时,在荧光屏上出现的故障现象是.A、有扫描线, 但无噪声信号B、有扫描线, 但无回波信号C、有回波信号, 但无船首线D、无扫描线01052007(5) B雷达磁控管在调制脉冲作用下产生发射脉冲, 该发射脉冲的峰值功率____,平均功率____。
A、很大, 很大B、很大, 很小C、很小, 很大D、很大, 稍小01052008(5) C雷达磁控管更换后, 第一次灯丝预热的时间应不少于.A、15分钟B、20分钟C、30分钟D、60分钟01052009(5) C雷达发射脉冲的持续时间取决于____A、延时线的调整B、3分钟延时电路的调整C、调制脉冲的宽度D、方波宽度的调整01052010(6) B刚性调制器的开关元件是____, 储能元件是____.A、充氢闸流管, 仿真线B、真空管, 电容C、收发开关管, 电容D、可控硅, 仿真线01052011(4) C船用雷达设备中, 加在磁控管阴阳极间的电压是____A、直流1万伏以上B、交流1万伏以上C、负矩形脉冲1万伏以上D、负尖脉冲1万伏以上01052012(5) B磁控管阴阳极间绝缘电阻应为____A、1KΩ左右B、200MΩ以上C、接近0ΩD、100KΩ左右01052013(4) B新磁控管在使用前必须“老练”____以上.A、3分钟B、30分钟C、300分钟D、30秒钟01052014(5) A用氖灯检查磁控管上的特高压正常, 但雷达无发射则说明____A、磁控管坏B、没有触发脉冲C、调制器坏D、以上都有可能01052015(4) B存放时, 两个磁控管之间的间隔距离至少为____厘米.A、10B、20C、30D、5001052016(5) C磁控管在通电工作时, 若磁控管电流指示电表指灯抖动, 可能的原因是____A、调制脉冲幅度太大B、磁控管已衰老C、磁控管内有打火现象D、磁控管特高压太高01052017(6) B雷达调制器的任务是: 在触发脉冲作用下, 产生____脉冲, 加到____.A、正高压矩形, 磁控管阳极B、负高压矩形, 磁控管阴极C、正高压锯形, 磁控管阳极D、正高压锯形, 磁控管阴极0105018(4) D船用雷达产生大功率高频脉冲的元件是____A、本机振荡器B、收发开关C、天线D、磁控管0105019(5) D船用雷达工作时, 存有不安全的因素,为此雷达设有保护人身安全的控制是_____。
A、高压延时触点B、门开关C、天线安全开关D、B+C01052020(4) B下列雷达器件中, 哪种器件在新安装后使用前需进行老练____A、速调管B、磁控管C、显像管D、闸流管01052021(5) C备用磁控管应该存放在____A、直接放在铁板上B、放在铁盒内C、放在木匣或塑料盒内D、A或B01052022(4) C下列器件中属于发射机的是____A、混频晶体B、收发开关C、调制管D、速调管01052023(5) D下列器件中不属于发射机的是____.A、仿真线B、磁控管C、三分钟延时电路D、中频放大器01062001(5) B为了减少雨雪干扰回波, 雷达天线可采用A、水平极化天线B、圆极化天线C、高速转动天线D、隙缝波导天线01062002(5) C在相同的天线水平尺寸时, X波段雷达比S波段雷达A、抗雨雪干扰能力强B、抗海浪干扰能力强C、方位分辨力好D、作用距离远01062003(4) B一般雷达天线每钟旋转一周.A、1秒B、3秒C、1分D、3分01062004(5) C雷达开机正常, 只有天线不转, 首先应检查天线____。
A、马达供电电路B、驱动马达绕组C、保险丝D、减速齿轮01062005(6) B造成雷达目标图像左右扩大的主要因素是____。
A、垂直波束宽度B、水平波束宽度C、脉冲宽度D、脉冲重复频率01062006(4) B船用雷达的船首信号产生于____。
A、天线收发开关B、船首线微动开关C、天线方位同步发送机D、B或C01062007(4) B当雷达天线改装时, 距离移动或高度改变较大时, 应重新调整____。
A、高压延时B、扫描延时C、扫描速率D、扫描线性01062008(5) B雷达的波导隙缝天线水平波束宽度, 将影响雷达____。
A、距离分辨力B、方位分辨力C、方位误差D、距离误差01062009(5) C波导扼流槽的作用:______A、防止水流入波导B、防止水流入发射机C、保持波导电气连续D、A+B01062010(6) D雷达使用园极化天线后, ____A、雨雪回波削弱B、对称物体回波削弱C、作用距离减少D、上述说法都正确01062011(5) B船用雷达天线应____用干净软布清洁一次.A、每月B、每半年C、每一年D、每两年01062012(4) C雷达的收发机与天线之间用来传输微波信号的是____A、同轴电缆B、波导管C、A或B均可D、A或B均不可01062013(4) D船用雷达天线的水平波束宽度约为____度.A、7B、5C、3D、101062014(4) C船用雷达天线的垂直波束宽度约为____度.A、7B、1C、22D、4501062015(5) D雷达发射机磁控管电流正常. 天线口没有辐射, 可能的原因是____A、波导管积水B、波导管破裂C、波导管严重变形D、以上都有可能01062016(6) A雷达天线的方向性系数是用来衡量天线的能量聚束能力的, 其值应当____A、大于1B、小于1C、等于1D、都可以01062017(5) B如果某雷达的天线水平波束宽度太宽, 则它的____A、距离分辨力差B、方位分辨力差C、测距精度差D、测方位精度一定高01062018(6) C雷达的垂直波束宽度大, 在恶劣天气时对探测目标影响是____A、可增加作用距离B、可减少海浪回波C、可减少波束内的目标丢失D、减少折射01062019(5) C要使雷达荧光屏上扫描线与天线同步旋转, 必须从天线系统中送信号到显示器, 它是____A、触发脉冲B、船首标志信号C、天线方位角信号D、目标回波信息01072001(5) A雷达收发开关衰老会引起雷达盲区____.A、增大B、减少C、不变D、时大时小01072002(4) A船用雷达的天线是收发共用的, 控制这转换的装置是____A、收发开关B、波导管.C、定时器D、方位同步接收机01072003(5) C雷达观测时, 如发现雷达盲区增加很大, 这种情况下应更换____A、反射速调管B、混频晶体C、收发开关管D、磁控管01072004(5) C雷达混频晶体连续烧坏, 应首先检查____A、磁控管B、速调管C、收发开关管D、晶体本身质量01072005(5) A在使用过程中, 需要调谐的收发开关是____A、窄带气体放电管B、宽带气体放电管C、固态收发开关D、以上都是01082001(5) B雷达混频晶体的正反向电阻比应为____A、1:1B、小于1:10C、大于1:20D、大于1:10001082002(4) C雷达接收机中混频器输出的信号是____A、本振信号B、视频回波信号C、中频信号D、射频回波信号01082003(6) D雷达本机振荡器使用的元件是____A、微波晶体三极管B、体效应二极管C、反射速调管D、以上都是01082004(6) D船用雷达接收机常用中频放大器的中频频率为____A、30M HZB、45M HZC、60M HZD、以上都是01082005(4) B实用雷达中, AFC电路通过控制____ 来保证混频输出的中频不变.A、发射频率B、本振频率C、谐振频率D、回波频率01082006(5) D雷达设备中用来产生小功率超高频等幅振荡的元件是____A、定时器B、调制器C、磁控管D、速调管01082007(4) C速调管是雷达设备中哪一部分的组件?A、发射机B、天线系统C、接收机D、显示器01082008(4) D雷达接收机输出的信号是____A、射频回波信号B、本振信号C、中频信号D、视频回波信号01082009(6) A雷达接收机中的反海浪干扰电路是用来____.A、调节接收机的近程增益B、调节回波脉冲强度C、改变海浪回波的极化D、改变发射脉冲强度01082010(5) A雷达接收机的输入信号频率等于____.A、磁控管发射频率B、发射频率加中频C、发射频率减中频D、脉冲重复频率01082011(4) A雷达说明书中所给出的噪声系数N的大小, 表示____的高低.A、接收机灵敏度B、发射机灵敏度C、A和B都对D、A和B都错01082012(5) D通常现代雷达接收机的通频带宽度为____兆赫.A、3-5B、5-8C、8-25D、3-2501082013(6) B雷达接收机通频带随____转换而改变, 在近量程采用____通频带.A、量程, 窄B、量程, 宽C、显示方式, 窄D、显示方式, 宽0102014(6) D使用STC旋钮, 会影响雷达的哪种使用性能?A、减少作用距离B、降低距离分辨力C、降低方位分辨力D、降低接收机近程灵敏度01082015(5) C对回波信号的放大倍数, 由雷达面板上的____控制.A、辉度B、调谐C、增益D、三者均可01082016(6) A雷达接收机的最小可分辨功率Prmin与噪声系数N之间的关系是____.A、正比关系B、反比关系C、平方根关系D、没有关系01082017(6) B雷达接收机中晶体电流正常可说明____.A、回波已到达接收机B、本振和混频晶体工作C、A+BD、仅说明本振是工作的01082018(6) D能表明雷达接收机工作是正常的, 下列哪个说法正确.A、有混频晶体电流B、有磁控管电流C、旋增益钮屏上噪斑有变化D、A+C01082019(6) C雷达接收机中晶体电流的大小能反映出____.A、回波信号的大小B、发射功率的大小C、本机振荡器功率的大小D、电源电压的大小01082020(5) C雷达接收机的前置视频放大器的作用是____.A、放大检波输出的视频信号B、放大检波输出的中频信号C、使电路前后匹配连接D、推动视频放大器01082021(5) D雷达接收机增益旋钮是控制____.A、荧光屏亮度电压B、磁控管电压C、速调管反射极电压D、前置中放与主中放的控制电压01082022(6) C在下列哪种情况下, 应对本振进行调谐.A、更换磁控管后B、更换速调管后C、A和B两者都要D、A和B两者都不必01082023(5) B为了增大接收机的动态范围, 中频放大器应使用____.A、线性放大器B、对数放大器C、A或BD、A和B都不行01082024(4) C下列组件中属于接收机的是.A、磁控管B、阴极射线管C、混频晶体D、调制管01082025(5) D下列组件中不属于接收机的是.A、仿真线B、距离扫描电路C、定时器D、以上都是01082026(5) B接收机前置中频放大器的主要作用是.A、放大中频信号B、抑制噪声, 提高信噪比C、两者都是D、两者都不是01082027(5) A接收机主中频放大器的主要作用是.A、放大中频信号B、抑制噪声, 提高信噪比C、两者都是D、两者都不是01092001(6) B使用雷达显示器中的“雨雪开关”将会。