GPS_GPRS设计建议ublox
uBlox-GPS开发使用说明
uBlox-GPS开发使用说明uBlox-6M GPS开发板使用手册2013-01-281417电子工作室/宇新电子版本更新说明版本修改日期修改说明V1.00 2012-12-28 初稿建立V2.00 2013-01-28 增加USB转串口接口、SPI接口前言A. 关于本手册本手册介绍了uBlox-6M开发板的硬件特性接口描述和连接使用方法。
同时对上位机软件的使用进行了详细的讲解。
如果用户需要了解更多的相关信息,请访问1417工作室论坛B. 版权声明本手册为开放手册,用户在保证手册内容完整性的前提下,可以自由转发C. 版本更新我们将会不定期对手册内容进行更新,更新说明会在手册的第2页中列出,请登录我们论坛中的“资料共享”专区,下载最新手册D. 意见反馈如果您发现手册中有不正确的地方,或者对手册内容更新有什么好的建议,请发送电子邮件至563216330@第一章产品说明1.1 产品简介1417工作室与宇新电子联合推出的uBlox系列产品uBlox-6M是一款高性价比的GPS开发板,为广大单片机、嵌入式和GPS爱好者提供一个高性能,稳定易用的GPS开发平台。
此开发板的GPS接收机采用世界顶级GPS厂商u-blox公司的NEO-6M模组,拥有世界先进的GPS 接收机技术。
开发板的硬件完全参照官方设计手册设计制作,经过长期测试和修改,最大限度地保证了接收信号的强度,使接收机的性能发挥到极限。
开发板接口简单,即插即用,可配合各种单片机和嵌入式开发板使用,同时配有上位机软件和参考代码1.2 功能特性高精度,高性能GPS接收机带有可充电后备电池,可实现热启动1秒钟快速定位TTL电平与CMOS电平的UART接口,方便连接各种处理器5V/1A DC直流电源输入1路RS232电平串口,1路USB2.0接口方便连接计算机,配有专业GPS测试软件电源和工作状态指示灯引出全部信号线,供开发测试使用1.3 应用领域汽车电子:民用车载GPS导航仪;物流车量追踪管理系统;车量防盗系统;城市智能交通管理系统等手持设备:智能手机,PDA,适用于个人旅游及野外探险的各种手持导航设备科学考查:地图测绘,水下地形测量,地质灾害监测工业农业:精细农业(无人耕种);工程机械控制;工程建筑测量;石油电力等行业对设施的管理和监测航空航海:飞机航路引导,船舶行驶导航1.4 GPS开发板配件清单名称数量说明uBlox-6M开发板1块NEO-6M主芯片GPS有源天线1块3米国产天线5V/1A直流电源1块给开发板提供电源交叉串口线1条用于连接计算机优质USB下载线1条用于连接计算机杜邦线4根用于连接其他开发板1.4.2 资料清单内容说明GPS测试程序(MCU)适用于51单片机的程序u-blox 手册u-blox原厂PDF手册GPS开发板用户手册开发板硬件介绍和使用说明GPS开发板原理图PDF格式原理图u-centerSetup-7.0.2.1 GPS测试评估软件,带USB驱动Google Earth 谷歌地球全球3D卫星地图导航软件PC版凯立德3D语音导航版串口调试助手V2.2 非常实用的串口工具1.5 GPS主芯片简介:(仅供参考)使用瑞士u-blox公司的 NEO-6M模组,第6代GPS接收机,搭载了高性能的50通道ublox 6技术,超过100万个有效相关器32通道采集引擎的处理能力使得模组可进行大规模并行搜索。
《基于GPS与GPRS的车辆防盗系统的设计与实现》范文

《基于GPS与GPRS的车辆防盗系统的设计与实现》篇一一、引言随着科技的发展和人们生活水平的提高,汽车已经成为现代生活中不可或缺的交通工具。
然而,汽车盗窃问题依然存在,给人们的财产安全带来了极大的威胁。
为了有效解决这一问题,本文提出了一种基于GPS与GPRS的车辆防盗系统。
该系统利用全球定位系统(GPS)和通用分组无线服务(GPRS)技术,实现对车辆的实时监控和远程控制,有效提高车辆的安全性。
二、系统设计1. 硬件设计本系统主要由GPS模块、GPRS模块、中央处理单元、电源模块、传感器模块等组成。
其中,GPS模块用于实时获取车辆位置信息,GPRS模块用于实现远程通信,中央处理单元负责数据处理和指令执行,电源模块为系统提供稳定的电源,传感器模块则负责检测车辆的状态信息。
2. 软件设计软件部分主要包括数据处理、通信协议、控制算法等模块。
数据处理模块负责接收GPS和传感器模块的数据,进行解析和存储。
通信协议模块负责与远程服务器进行数据传输和指令交互。
控制算法模块则根据接收到的指令和数据,对车辆进行远程控制。
三、系统实现1. GPS定位模块实现GPS定位模块通过接收来自GPS卫星的信号,实时获取车辆的位置信息。
本系统采用高灵敏度GPS芯片,提高了信号接收的稳定性和准确性。
同时,通过GPS数据处理算法,将位置信息转换为经纬度、速度、方向等数据,为后续的远程控制和报警提供依据。
2. GPRS通信模块实现GPRS通信模块负责与远程服务器进行数据传输和指令交互。
本系统采用TCP/IP协议进行通信,保证了数据传输的稳定性和可靠性。
同时,通过GPRS网络,实现了对车辆的远程监控和控制。
3. 中央处理单元实现中央处理单元负责数据处理和指令执行。
本系统采用高性能的微处理器,能够快速处理来自GPS和传感器模块的数据,并根据接收到的指令,对车辆进行远程控制。
同时,通过与GPRS模块的配合,实现了对车辆的实时监控和报警功能。
ublox LEA4H GPS实例制作
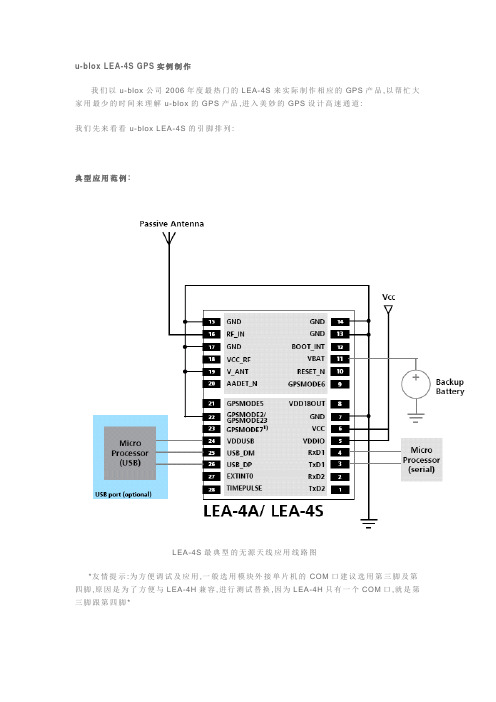
u-blox LEA-4S GPS实例制作我们以u-blox公司2006年度最热门的LEA-4S来实际制作相应的GPS产品,以帮忙大家用最少的时间来理解u-blox的GPS产品,进入美妙的GPS设计高速通道:我们先来看看u-blox LEA-4S的引脚排列:典型应用范例:LEA-4S最典型的无源天线应用线路图*友情提示:为方便调试及应用,一般选用模块外接单片机的COM口建议选用第三脚及第四脚,原因是为了方便与LEA-4H兼容,进行测试替换,因为LEA-4H只有一个COM口,就是第三脚跟第四脚*模块的第22脚接地请改用0欧姆电阻,如果该线路替换成LEA-4H时,第22脚请悬空(即可不装0欧姆电阻)以上图示中,VCC为3V供电,对电源要求纯正稳定,纹波系数为不能大于50mV,备用电池为SII的可充电锂电MSP621u-blox 无源天线GPS版本参考外观图(声明:上图版权属于u-blox公司所有,在此仅为引用参考之目的,由于版权关系,我们不提供上图相应的PCB及接线方式文件,敬请读者见谅)GPS模块电源供电的处理及其重要性由于LEA-4S/4H/4S-1系列高感GPS,灵敏度实在是太高,甚至可以在弱信号环境接受到微弱的反射信号从而应用于恶劣环境导航,当然,u-blox有自己的一套GPS算法,可以在强信号滤除这些影响精度的干扰或反射信号,所以在弱信号环境,虽然能收到信号,但是这些信号往往包含反射及折身信号,往往飘移及误差也会加大,但我们从现实出发,客户在室内定位能够收到一个精度不高但是可以定位的信号往往比普通GPS模块不能收到任何信号感觉肯定要好!但高灵敏度模块捕获能力的同时对电源部分或其它RF部分引起的干扰也是极为敏感,在通常很多客户的电源来自于DC/DC的情况下,出现的奇怪现象是可以接受到16个全部通道的绿色信号,这些并非GPS信号,而是由于干扰或杂波引起,并不是模块本身的问题,出现这样的原因,客户需要自己找出干扰源或电源部分的影响.我们建议客户在使用这些模块的电源上能够进行妥善的电源处理,例如电源前面加上精工的3V LDO,LOD有两个优势,一个是可以提供给模块一个稳定的电源,保证后部分模块工作不会因为电源电压引起的变化而引起电源阻抗的变化,若电源电压变化的同时将会导致电源的内阻稳定性劣变,也会影响到模块性能的发挥,二来好的LDO可以滤除不纯净的前端信号,可以进行有效的降噪,虽然效率不及DC/DC,但我们认为是有必要加入LDO的.LDO的压差越小,消耗的内部功率就会越小,而且有利于LDO本身的温度控制,比较理想的是LDO前级是在4V左右输入,后级3V输出,模块部分150mA已经足够,但对于GPS模块而言,一般情况下,在模块冷启动到模块完全稳定工作时的功率消耗会是平时功耗的1.5-2倍左右的功耗.电源应该加上电感及电容阻成的多重滤波网络,按照最高级别的RF标准设计.GPS天线的选择及使用无源天线推荐使用18*18*4以上级别(例如25*25*4的陶瓷天线效果在性能及体积方面往往为表现最佳),我们发现,同种类型越大尺寸的天线往往更容易获得高的灵敏度,例如军用的GPS,为了获得最高级别的灵敏度效果,GPS天线的尺寸足有脸盆大小,真是叫人汗颜!不过发现目前最好的GPS天线类型仍属于平板陶瓷天线,唯一遗憾的是它相对有些方向性及尺寸有些偏大,用超小尺寸贴片型无源天线的客户要特别小心了,由于天线的信号过于微弱可能会导致整机灵敏度不高的问题!要特别注意从天线端口到RF_IN的引脚之间的PCB连线高频阻抗匹一定要进行50欧姆阻抗匹配,要特别注意高频布线原则,就是天线部分尽可以少受到其它无线RF的干扰.否则会极大的影响到整机的灵敏度,另外无源天线本身信号较弱,RF_IN端的天线输入端走线需要尽量的短,否则会牺牲一定的灵敏度,在RF_IN附件的铺地应该采取均匀的铺地过孔包围RF_IN的设计设计,以保证良好的屏蔽效果,过孔应加绿油以更加强屏蔽外界对其的干扰,在足够空间的情况下可以对其进行金属屏蔽罩处理.无源天线由于会受到整外壳的影响会产生一定的频率偏差,往往需要天线厂家进行相应的调校,以便达到最好的工作状态,事实证明,在有效调整整机的无源天线的匹配情况下,可以最大限度的发挥出无源天线本身的灵敏度.无源或有源天线后部的PCB接地,则是越大越好,对灵敏度将会产生一定的影响,例如我们常用的车载GPS,往往是整个天线吸在车顶,而车顶相当于一个大的接地反射面,往往会取得非常好的灵敏度.事实证明,无源天线后部不同的接地面积也反映了不同的灵敏度,自然是铺地面积越大的板子,灵敏度越高,所以在一般情况下应该尽量增加天线后部PCB的铺地面积,同时无源天线应该尽量摆放于后部PCB接地的正中央.天线部分引线应该尽量的避免靠近电源及模块部分,例如以上的RF_IN脚的线路应该避免太近于GPSMODE5或是其它数字部分线路,否则会有部分干扰影响灵敏度!同时天线走线的外围最好能进行细的密包地过孔设计,阻止其它杂波干扰.有源天线由于陶瓷天线已经在外壳并已进行过调效匹配,所以使用相对简单,并且由于有源天线内部有经过LNA的放大,即使RF_IN走线稍长,影响也比相对较小,适合于较高灵敏度的场合,对于实际制作将会降低相应的难度,而事实上,成功的无源天线跟有源天线的灵敏度是极为接近的,如果灵敏度相差太大不能简单的认为无源天线灵敏度不够,而只能说是无源天线要设计得棒实在是太难!至于LNA,对LNA的选择是非常严格的,除了放大倍数之外最主要还是噪声系数,因为在放大有效信号的同时会同内部噪音一起放大!如果噪音太大,会极大的影响到GPS灵敏度的发挥.不好的LNA对天线部分有极大的影响.所以各位天线厂家在选择LNA的时候千万不能因为省MONEY而失去重要的参数性能.整机强调性噪比的重要性对于整机的设计而言,模块接地与数字接地应该严格区分并单点接地,对于提高整机的性噪比有一定的影响,要特别注意RF_IN的影响,不要被有源高速器件如高速SD卡/CPU所干扰,对于PMP或手机面言,背光灯所用的高压LED驱动干扰最为严重,要加强屏蔽,以减少对RF 部分的影响,机器内部的各种各样的电磁反射/折射会严重的影响机器的灵敏度,除了天线的选择之外,良好的EMI处理是保证设计成功的关键之一.对于GPS而言,要收到一颗星的信号是相当于大海捞针般不易,技术含量金之高,是其它通讯设备无法比拟的,在这里我们强调信噪比,很多客户不能够理解为什么信噪比会极为重要?例如在你住在古老的村庄里,晚上睡觉的时候能够听到1公里之外布谷鸟发出的"咕咕"的声音,布谷鸟的声音有多大呢?会跟我们人的喊话声音是相差不大的,甚至于远处青蛙的叫声相信你一定是听得清晰明了,以至于爱失眠的你半夜无法入睡.反而言之,如果你站在大街上,如火车站,呼啸的火车穿流不息,在这种情况下,恐怕就是有人跟你面对面10米大声吼叫,你也无法知道他说话的内容,因为他的声音全被噪音给掩盖了,我们无法分辩出来相应的内容.但青蛙的叫声,或是布谷鸟的声音或是人声,简单来说是基本相同的音量,为什么会出现这种情况,原因是在噪音太大的环境里无效的噪声将有效信号全给掩盖掉了.反而言之,越是微弱的信号,越需要"掉在地上一根针也能听到"的理想环境才能够分辩,纯静纯静,再纯静,这就是GPS对信噪比要求极高的精髓,也是技术金含量最高原因之所在,所以你也能顺畅理解为什么GPS模块对电源及RF要求高的真正原因了,你也能够准确理解低噪LNA价钱贵的原因了.GPS模块软件算法处理的重要性而且,而对大海捞针般捕获到的信号,你还需要分辩信号的真伪及取舍.为什么会有信号的真伪呢?例如,GPS同时收到两个信号,一个来自于直接的天空卫星直接的信号,信号没有经过任何处理,而另一个信号是经过反射折射之类的信号,信号质量已经劣化,导致误差加大,GPS模块需要提练相应的直接信号.如何辩别这些信号的不同这点是所有GPS厂商设计的秘密,也是顶级GPS与低档GPS本质的区别,也是精度不同的真正原因所在,u-blox敢于从2001年开始认为自己的模块达到了2.5米的精度要求,与瑞士人与生俱来的精度运算及精密滤波处理是分不开的,u-blox的GPS基本上等同于瑞士的钟表,卓而不凡,对精度及品质要求异常严格.至于取舍,又是一个难以处理的问题了,GPS同时会收到很多的信号,例如同时收到9颗星,它会不会全部直接用于导航呢?答案是不会,它只会从其中挑选信号质量最好的四颗用于导航,它会把9颗星的信号全部进行四颗一组,四颗一组这样的组合运算,然后挑选其中最完美的一组做为最终采纳的信号,这其中又牵涉到了一个组合算法的问题,究竟哪个算法是最完美的,哪种算法能够让精度达到最高?这点不仅要有良好的理论基础,同时还要有长时间的观察细致的实践,这又是GPS设计厂商的一个不公开的秘密武器了.u-blox能够精确的从这些组合当中挑选最好的真实信号进入后期处理,这些都是一般的GPS厂商无法做到的.以上线路图当中介绍的是典型最简单的应用及部分GPS模块的基本原理,上面的线路图就是一个最简单的UART电平输出的GPS系统,或是可以跟PC用USB连接了.*友情提示:u-blox的模块内置USB驱动目前是支持32位操作系统win98/2000/XP/2003,其它操作系统有可能不支持,待验证*LEA-4S/4H的USB连接接线图注意,如果是直接跟USB连接,还要注意电源部分的处理,推荐使用增加SII的S-1112B30M 3V LDO,80db的高纹波抵制率:LEA-4S USB接口线路图LEA-4S的有源天线供电电路两例我们通过以上电路看出,LEA-4S对有源天线支持,主要是对RF_IN端进行了3V电源的供应,给有源天线的提供LNA放大器所需要的电压,R_BIAS电阻推荐使用10欧姆,若使用有源天线,我们推荐使用25*25*4的3V有源天线.u-blox LEA-4S封装尺寸图OK,至此,相信大家对u-blox的GPS模块有了一个简单清晰的认识了吧.3000公里移动目标之后GPS模块的冷启动之前忽略跟大家交代的一个事情则是关于GPS模块的冷启动的问题GPS模块在出厂的时候是没有星历存储在里面的,但是如果是客户做出来的成品GPS,在做成样品送给客户之前往往会做一些相应的实际测试,这个时候模块内部就会保存当前的星历参数,然后这些产品在发出来给客户之后,有些客户可能是在海外,机器在启动后由于自动寻找上一次测试地点的GPS星历,星历参数肯定是不同的,由于无法及时辨认当地的GPS 信号而出现长时间无法定位的问题,我们在此要特别提醒客户,超过3000公里之后,一定要增加相应的指令对机器进行冷启动,清除当前的星历参数,重新定位,否则机器会出现长时间无法定位的问题,用单片机如何实现冷启动的方式可以参见以下文章:u-blox公司GPS模块的波特率修改及与单片机接口参数应用如果是没有MCU控制的客户,则需要对备份电源进行放电及GPS内部星历参数进行清空处理系统综合设计的重要性往往一个系统的设计,面临到EMI电磁兼容性,良好的天线部分设计,及跟模块配套的PCB 设计,都会对最终的产品产生不可估量的影响,如果您的产品设计有问题,将会彻底的影响到模块性能的发挥,或是出现各种异象情况,我们不能简单的例如灵敏度,异常情况出现,飘移太大等等将所有出现的问题归咎于模块本身的原因,例如u-blox的模块经过类似于奔驰法拉利这样的客户严格测试,模块是不可能出现这种荒谬的问题,经过调查发现,绝大多数的客户在设计当中出现不可回避的问题或是对于RF产品不熟悉而产生的错误观念的设计,好的产品设计不仅需要参考到专家提供的各种各样的正确的意见,还需要进行长期的基础性的研究及摸索,u-blox就是在历经风风雨雨过程当中成长起来的公司,对于RF部分,不能抱轻敌的态度,或是过于自信的处理,各种各样的问题需要实践及理论影响相互结合,才能最大限度发挥模块的优势.全世界90%以上的厂商采用GPS模块模式,但国内的情形就不同,很多人询问GPS芯片制作方案及软件GPS技术,甚至一度有GPS厂商简单到以为用GPS芯片做成模块到了今天类似于MP3拿起铬铁焊好就OK的程度了,言称已经完全掌握了"成熟的掌握了相应模块生产技术,可以极好的控制成本",以下结合实际为大家分析以下两种讨论最多的方案的不可行性,供各位在GPS领域的同仁位参考:芯片GPS方案的不可行性研究现在网上越来越多的呼声来讨论采用GPS芯片方案来做GPS,成本的优势自然是可以降低,可是绝大多数厂商过高估计了自身RF设计能力,往往没有能够意识到其中的风险:1:大多数公司不具备相应顶尖的RF工程设计师,一个真正合格的GPS模块设计工程师需要有5年甚至更长时间的RF设计经验2:对于软硬件配合的开发,尤其是关键的源代码,是掌握在极少数如u-blox这样的上游厂商手里,想要自行开发,十分的困难,除非能得到厂商的支持3:不具备合格的测试条件,对动辄几百万(入门级)的测试设备,一般的厂商也无法承受4:不具备相应的硬件加工条件,品质无法控制,例如u-blox投入巨资的X光全自动探测系统及全自动生产线,还有u-bolx投入巨资独家开发的GPS软硬件全自动检测系统,全世界仅有两三家工厂能够有实力投资采用,模块出厂后在客户产品使用中可能出现的不良品小于100万分之50(50ppm),平均无故障使用寿命为每天24小时,365天不间断连续使用超过16年,99%的厂商是无法进行这样的品质管理控制的,一度有厂商因为品质问题倒闭的先例不乏少数经过两次X光检测之后,u-blox公司的在生产过程中的经过严格检测之后不良品率低于千分之二(不良品将会当成废品处理)成为行业最高标准.5:模块不易升级,开发周期长,一般需要四到六个月以上,一旦开发完成,而且必须大批量生产半年或一年以上才能够有效的回收投资成本,可是现有的产品更新换代快,几乎是每年都要有换代,而芯片生产而言即使有更好的平台,也是较难以更换的6:自行设计生产GPS风险极大,有过不少失败的案例,即使能生产出来GPS模块,即使能够使用,与例如u-blox这样原厂设计,原厂生产的模块还是具备相当大的性能技术品质差距,基本上可以认为是相对成本较低的模块=相对性能较低的模块,事实上,就等于压缩了银两来采购低一个档次的模块,其结果往往投入了巨大的投资及人力并不能达到理想的程度,低质的产品对于要求较高的行业,显然是不用考虑的,只会在低档产量极大纯粹关心价格,且可以忽略所带来的技术问题的才会考虑这样的构想奉劝不具备相应的实力的中小型企业,建议放弃芯片设计途径,还是以采购模块为现状,在大量产能的前提下,完全可以通过议价方式来降低成本,与其投入这些费效比低且投资巨大的产业,不如将这些人力物力投资在现有的新产品研发上,各家专注自已的强项,成品的利润是绝对高于零部件的.当然对于具备条件的公司,有稳定的订单,有强大的RF研发能力,有良好的财力背景,也还是有可能性的,不过这样的公司依我们之见在国内尚属极少数,用凤毛麟角来形容是再合适不过了.软件GPS方案的不可行性研究关于网上讨论热烈的软件GPS技术,就是依附于系统的主CPU ARM9完成GPS软件的运算,我们也是坚决投不赞成票的,原因如下:1:软件GPS目前还是处于初始阶段,没有得到足够的认可,技术层面存在相应的不足,相应的太多技术问题没有得到解决2:软件GPS需要硬件的支持,GPS软件跟相应的程序硬件一块在ARM9共用运算会有相应的冲突及影响,会占用部分极为紧张的ARM9资源3:软件GPS无论是精度还是灵敏度,启动时间等在其它各项性能参数,还不足以达到实用化的程度,更不用谈到可以用于实际导航,换而言之,它现有的情况是只能呆在实验室里供研究4:除了成本低之处,对RF处理部分要求极高,在目前的天线技术没有得到长足的情况下,软件GPS的表现会让人十分的沮丧,RF对厂商的处理依然是不可跨越的沟鸿.到今天为止,也没有任何GPS公司用软件GPS形成批量生产效应,或许是在未来的五年后,有可能实现,但是在近期,我们面对应用的现实,现阶段必须以采购模块为现实.总结及建议我们最熟悉的一句俗话便是"没有金刚钻,不揽瓷器活",GPS是个技术含量极高,风险极大,对产品设计,研发及生产,测试都有一系列苛刻的要求,可目前的现状却是很多企业明明手里只握着刚出炉的铜钻或是铁钻来招揽瓷器活儿,这结果往往是可想而知了,不是打击这些企业的信心,而是目前确确实实是能把GPS模块或替代方案做出来的公司,做得好的真是少之又少,极为罕见!我们所讨论的只是讲清楚目前的行业现状罢了.GPS产品的设计时间是多长?恐怕没有一个具体的结论,因人而异,因公司而异,很多人一拍屁股说,用GPS模块加根天线,一个月足矣,反正我们是没有见过,也不敢相信连GPS原理都不是太了解的公司,一个从来没有作何经验的公司,能够一个月把GPS做好,实在是太轻视了GPS整机技术力量的难度.纵观GPS的天线选型,方案论证,模块选型,元器件实验评估,前期评估测试,具体设计,前期GPS测试,GPS样品测试,调试,GPS环境测试,GPS认证,GPS EMI测试,EMI优化,GPS软件兼容性评估,GPS路测,GPS仪器测试,GPS小批量试产,GPS中批量试产,GPS方案改进,这些,不是都需要投入巨大的人力物力及时间来得以保证实现吗?一个真正负责任的公司,一个真正有一定品质保证的公司,一个真正可以长期发展生存的公司,是不会拿自己的声誉来当儿戏,更不会选择没有品牌意识,品质差,返修率高,技术支持不到位的产业公司成为其长期合作伙伴的.价格确实是重要的一个环节,我们从来不讳忌我们的产品价格定位,因为u-blox产品定位本身就是可以认可产品质量及服务的公司,选择u-blox是基于长期合作考虑的理由,当然也其他公司更便宜的产品线,但是我们也要计算其中的隐性成本:使用这些小公司的产品应用于你的产品当中你能确信设计是没有缺陷的吗?你能确保你的产品整机达到技术要求吗?你能对自己的产品有十分的了解并抱有一定的信心吗?对你提供技术支持的工程师能够满足现有的技术支持要求吗?你能够对自己的产品保证不会出现退货及返修的情形吗?最后的一个问题是最难回答的,选择不符合技术指标及质量的产品,轻则失去整个市场,失去所有客户的信赖,重则令到整个公司倾家荡产,这个可能性有多大?可能性虽然不是多,但是类似案例是一直有听说,我们能够评估风险机率的就是自己对这个产品究竟了解有多少.。
车辆实时定位方案

车辆实时定位方案随着物联网技术的发展, 实时定位系统广泛应用于车辆管理、路况监控、紧急救援等领域。
本文将介绍一种车辆实时定位的方案,详细说明其设计过程、原理以及实现方法。
方案概述本方案采用GPS定位技术,结合GPRS/4G网络通信,实现车辆的实时定位。
具体实现流程如下:1.车辆装有GPS设备,以及SIM卡。
2.GPS设备获取车辆的位置信息,并通过GPRS/4G网络上传至服务器。
3.服务器接收到GPS数据后,进行解析和计算,得到车辆的实时位置。
4.用户通过Web或移动端的应用程序,查询车辆的位置信息。
设计原理GPS定位技术是本方案的核心。
GPS(Global Positioning System) 全球卫星定位系统,是一种卫星导航系统,由美国政府运营。
该系统由一组卫星、地面控制站以及用户接收设备组成。
通过GPS设备接收到卫星发射的位置信号,就能够确定设备的位置。
GPS定位的优点是定位精度高、覆盖面广,可以全球范围内进行位置定位。
本方案采用GPS模块与单片机相结合的硬件设计,用MCU(Micro Control Unit)来采集GPS数据。
MCU通过串口中断方式接收GPS发送的NMEA协议格式数据,并通过GPRS/4G网络上传到云服务器。
服务器解析接收到的GPS数据,并得到了定位信息,即车辆的实时位置。
实现方法硬件部分1.GPS模块:采用U-blox公司的GPS模块进行定位。
2.单片机:采用STM32F103C8T6单片机进行数据采集。
3.SIM卡:使用3G/4G通信模块,需要插入支持GPRS/4G通信的SIM卡。
4.电源:使用汽车电瓶或者另加电源模块进行供电。
软件部分1.GPS模块驱动程序:根据U-blox公司提供的硬件接口手册来编写GPS模块的驱动程序。
2.数据上传程序:将GPS数据通过GPRS/4G网络上传至服务器。
3.服务器数据解析程序:解析上传的GPS数据,并把解析的数据存储在数据库中。
4.用户查询程序:Web或移动端应用程序,用于查询车辆的位置信息。
U-Blox芯片GPS 模块的UBX协议解析与配置
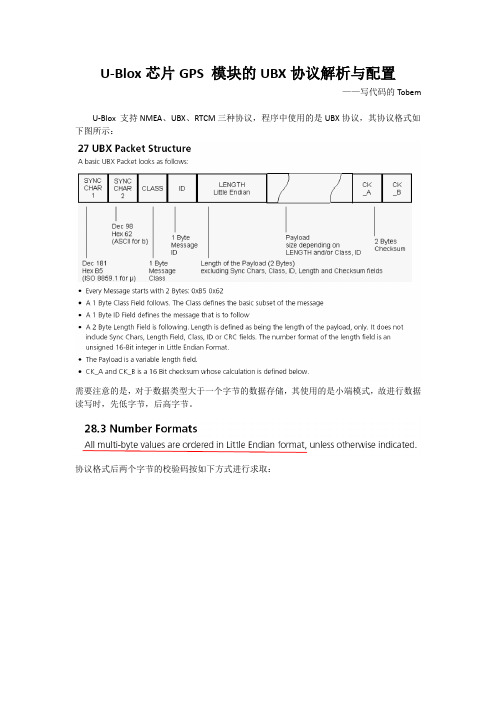
U-Blox芯片GPS 模块的UBX协议解析与配置——写代码的TobemU-Blox 支持NMEA、UBX、RTCM三种协议,程序中使用的是UBX协议,其协议格式如下图所示:需要注意的是,对于数据类型大于一个字节的数据存储,其使用的是小端模式,故进行数据读写时,先低字节,后高字节。
协议格式后两个字节的校验码按如下方式进行求取:GPS进行使用前,需进行初始化配置,主要涉及串口通信配置,将设置写入eeprom中,GPS 的更新频率、要进行转换读取的数据包等:switch(packet_count){case 1:{//配置GPS UBX协议输出,波特率为38400packet_count++;}break;case 2:{//命令存储在eeprom中packet_count++;}break;case 3:{//配置gps更新频率为4hz,导航更新为4hz,采用utc时间packet_count++;}break;case 4:{UBX_CFG_MSG_Encode(NAV_POSLLH); //配置所需数据包packet_count++;}break;case 5:{UBX_CFG_MSG_Encode(NAV_STATUS); //配置所需数据包GPS_Encode_Index = 0;packet_count++;}break;case 6:{UBX_CFG_MSG_Encode(NAV_SOL); //配置所需数据包packet_count++;}break;case 7:{UBX_CFG_MSG_Encode(NAV_VELNED); //配置所需数据包packet_count++;}break;}GPS的配置以命令形式进行,主要参考手册中的CFG的相关指令。
下面以配置GPS UBX协议输出为例,进行GPS配置命令的说明://通信协议配置void UBX_CFG_PRT_Encode(u16 Protocol_out,u32 Baudrate) //只配置输出模式和波特率(占四个字节) {write_two_byte_to_GPS_Encode_Buffer(0X0001); //目标串口1write_two_byte_to_GPS_Encode_Buffer(0X0000);write_two_byte_to_GPS_Encode_Buffer(0X08D0);write_two_byte_to_GPS_Encode_Buffer(0X0000);//配置波特率,先低字节,后高字节write_byte_to_GPS_Encode_Buffer(Baudrate%256);write_byte_to_GPS_Encode_Buffer((Baudrate%(0XFFFF+1))/256);write_byte_to_GPS_Encode_Buffer((Baudrate%(0XFFFFFF+1))/(0XFFFF+1)); write_byte_to_GPS_Encode_Buffer(Baudrate/(0XFFFFFF+1));write_two_byte_to_GPS_Encode_Buffer(0X0001); //协议输入默认为UBXwrite_two_byte_to_GPS_Encode_Buffer(Protocol_out); //输出协议格式write_two_byte_to_GPS_Encode_Buffer(0X0000);write_two_byte_to_GPS_Encode_Buffer(0X0000);}前面说到数据类型大于一字节的数据,其按小端模式进行存储,因此先写低字节,后写高字节://写2字节到编码缓存void write_two_byte_to_GPS_Encode_Buffer(u16 value){GPS_Encode_Buffer[GPS_Encode_Index++]=value; //先写低字节GPS_Encode_Buffer[GPS_Encode_Index++]=(value>>8); //后写高字节}GPS的频率配置如下,根据手册,导航频率参数设置似乎不对:UBX_CFG_RATE_Encode(250,250,Time_source_UTC); //gps测量为4hz,导航为4hz,采用utc时间程序中使用串口7中断进行GPS数据的接收,一旦还接收到数据,就将定时器7的计数清零,定时器7设置为100ms中断,假如100ms内没有数据接收到,且接收缓冲区的首地址内容非空,则认为接收完成。
gps定位器方案
GPS定位器方案1. 简介GPS定位器是一种利用全球定位系统(GPS)技术,通过卫星接收和处理等方式来确定地理位置的设备。
随着GPS技术的发展和成熟,GPS定位器在各个领域得到广泛应用,包括汽车导航、物流追踪、户外运动等。
本文将介绍一种基于GPS技术的定位器方案,涵盖了硬件设备、软件平台和数据处理等方面。
通过阅读本文,您将了解到如何设计和实现一种高效可靠的GPS定位器。
2. 硬件设备2.1 GPS芯片GPS芯片是GPS定位器的核心部件,用于接收和处理卫星信号,并计算出设备的地理位置信息。
常见的GPS芯片有u-blox、Quectel等品牌,选择一款功能强大、性价比高的GPS芯片对于定位器的性能至关重要。
2.2 天线天线用于接收卫星信号,提供稳定和准确的定位效果。
一般采用陶瓷天线或陶瓷贴片天线,其具有小巧、轻便、抗干扰等特点,适合于GPS定位器的应用场景。
2.3 电池电池是GPS定位器的能源来源,选择容量适当的电池可以保证设备的长时间使用。
此外,还需考虑电池的充电方式和电池寿命等因素,以确保定位器的持久稳定运行。
2.4 控制电路控制电路是GPS定位器的主要控制部件,负责接收GPS芯片和其他外设的数据,并进行处理和控制。
通常采用微处理器、MCU等控制器,具有高性能和低功耗的特点。
3. 软件平台3.1 嵌入式操作系统嵌入式操作系统是GPS定位器软件的基础,负责系统的运行管理和资源分配等。
常见的嵌入式操作系统有FreeRTOS、uC/OS-II等,选择一款稳定可靠的嵌入式操作系统对于系统的高效运行至关重要。
3.2 定位算法定位算法是GPS定位器软件的核心部分,用于对卫星信号进行解析和计算,从而得出设备的地理位置。
常见的定位算法有卡尔曼滤波算法、最小二乘算法等,选择适合项目需求的定位算法可以提高定位的准确性和稳定性。
3.3 数据通信数据通信是GPS定位器与外部设备进行数据交互的方式。
常用的数据通信方式包括GSM、GPRS、3G、4G等,选择合适的数据通信方式可以实现实时数据传输和远程监控等功能。
《基于GPS与GPRS的车辆防盗系统的设计与实现》范文

《基于GPS与GPRS的车辆防盗系统的设计与实现》篇一一、引言随着科技的发展和人们生活水平的提高,汽车已经成为人们日常生活中不可或缺的交通工具。
然而,车辆盗窃问题依然存在,给车主带来了巨大的经济损失和安全隐患。
为了解决这一问题,本文提出了一种基于GPS与GPRS的车辆防盗系统,旨在通过先进的科技手段提高车辆的防盗性能,保护车主的财产安全。
二、系统设计1. 硬件设计本系统主要由GPS模块、GPRS模块、控制单元和电源等部分组成。
其中,GPS模块用于定位车辆位置,GPRS模块用于实现远程通信,控制单元负责处理数据并发出指令,电源则提供系统所需的电能。
(1)GPS模块:采用高精度GPS芯片,能够实时获取车辆的位置信息。
(2)GPRS模块:采用GPRS通信技术,实现远程数据传输和指令控制。
(3)控制单元:采用高性能微处理器,负责处理GPS和GPRS模块的数据,并根据预设的规则发出指令。
(4)电源:采用车载电源供电,保证系统在车辆行驶过程中的稳定运行。
2. 软件设计软件设计包括操作系统、数据处理和通信协议等部分。
(1)操作系统:采用嵌入式操作系统,保证系统的稳定性和可靠性。
(2)数据处理:通过算法对GPS和GPRS模块的数据进行处理,提取出车辆的位置信息和其他相关数据。
(3)通信协议:采用标准的通信协议,保证系统与远程服务器之间的数据传输和指令控制的可靠性。
三、系统实现1. 定位功能实现通过GPS模块实时获取车辆的位置信息,并将数据传输给控制单元。
控制单元对数据进行处理后,通过GPRS模块将位置信息发送至远程服务器。
远程服务器对位置信息进行解析和存储,实现车辆的实时定位。
2. 报警功能实现当车辆发生异常情况(如被非法移动、非法启动等)时,系统会发出报警信号。
控制单元接收到报警信号后,会通过GPRS 模块将报警信息发送至车主的手机或电脑等设备上,提醒车主及时处理。
3. 远程控制功能实现车主可以通过手机或电脑等设备远程控制车辆的开关锁、断油断电等功能。
ublox f9p参数

ublox f9p参数u-blox F9P是一种高精度GPS技术,主要用于测量和定位,其参数和配置可以根据应用和需求进行调整和定制。
这篇文档将介绍u-blox F9P的一些关键参数及其解释和配置方法。
1. 位置精度位置精度是指GPS信号接收器确定其当前位置的准确程度。
在u-blox F9P中,位置精度通常表示为CEP(圆形误差概率)。
CEP值表示在一定时间内,接收器可以在其精度圆内发现95%的时间。
因此,CEP值越小,位置精度越高。
u-blox F9P的位置精度可以通过调整接收器的天线高度,增加接收器的GPRS数量和减少多路径影响来提高。
2. 精度评估高精度定位系统需要评估当前的定位精度,并为下一步精度评估做好准备。
u-blox F9P提供多种评估指标,包括位置可靠性,垂直精度保持,水平误差估计,时间同步等。
这些指标可以帮助用户评估当前的精度,并决定是否需要调整配置。
3. 数据频次u-blox F9P的速度和位置数据频次是指GPS频率,通常为1HZ。
用户可以根据应用需求提高或降低速度数据频次。
频次越高,精度越高,采样时间越短。
频次越低,成本更低,但采样时间更长,精度更低。
用户需要在应用需求和成本之间做出权衡。
4. 坐标系坐标系是指地球表面坐标系统,用于确定GPS接收器的准确位置。
UBlox F9P支持多个坐标系,包括WGS84和ETRS89等。
用户应选择适合其应用程序和地理位置的最佳坐标系。
5. 时钟精度时钟精度是指GPS信号接收器用于测量时间的准确程度。
u-blox F9P的内部时钟精确度可以在软件中确认,也可以根据实际应用要求进行调整。
高精度应用程序可能需要更精确的时钟精度,而低成本应用程序可能需要较高噪声时钟精度来节省成本。
6. 天线类型u-blox F9P支持各种天线类型,例如内置天线,外置天线和芯片天线等。
不同的天线类型适用于不同的应用程序,例如室内或室外环境,防水要求等。
用户应选择适合应用程序和需求的最佳天线类型。
u-blox公司产品波特率修改和与单片机接口参数应用
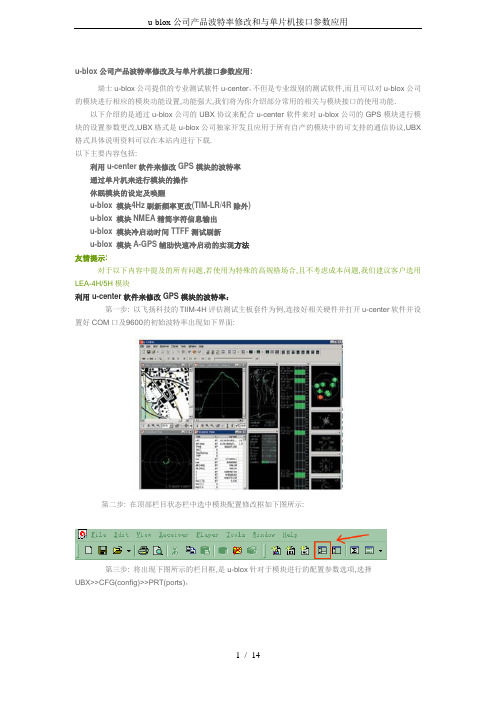
u-blox公司产品波特率修改及与单片机接口参数应用:瑞士u-blox公司提供的专业测试软件u-center,不但是专业级别的测试软件,而且可以对u-blox公司的模块进行相应的模块功能设置,功能强大,我们将为你介绍部分常用的相关与模块接口的使用功能.以下介绍的是通过u-blox公司的UBX协议来配合u-center软件来对u-blox公司的GPS模块进行模块的设置参数更改,UBX格式是u-blox公司独家开发且应用于所有自产的模块中的可支持的通信协议,UBX 格式具体说明资料可以在本站内进行下载.以下主要内容包括:利用u-center软件来修改GPS模块的波特率通过单片机来进行模块的操作休眠模块的设定及唤醒u-blox 模块4Hz刷新频率更改(TIM-LR/4R除外)u-blox 模块NMEA精简字符信息输出u-blox 模块冷启动时间TTFF测试刷新u-blox 模块A-GPS辅助快速冷启动的实现方法友情提示:对于以下内容中提及的所有问题,若使用为特殊的高规格场合,且不考虑成本问题,我们建议客户选用LEA-4H/5H模块利用u-center软件来修改GPS模块的波特率:第一步: 以飞扬科技的TIIM-4H评估测试主板套件为例,连接好相关硬件并打开u-center软件并设置好COM口及9600的初始波特率出现如下界面:第二步: 在顶部栏目状态栏中选中模块配置修改框如下图所示:第三步: 将出现下图所示的栏目框,是u-blox针对于模块进行的配置参数选项,选择UBX>>CFG(config)>>PRT(ports),默认的波特率是9600,如上图所示你可以根据需要修改相应的波特率在下拉菜单中进行选择,例如我们计划选用通信波特率为57600,请在Baudrate中选择57600,并请按底部的SEND按钮对模块进行命令发送:第四步: 选择完新的波特率之后,我们再在主栏目中选择当前选择新的波特率57600进行实时通信,如下图所示:第五步: 我们现在已经使用了新设置的57600的波特率进行通信,但如果要掉电保存在模块的FLASH 当中还需要对当前的信息进行操作,下次模块断电启动后便可从模块的FLASH(或E2PROM)当中读取新设置的波特率了,请选择栏目框当中的: UBX>>CFG(config)>>CFG(configuration)选项中, 墨认为: save current configuration 选项,这是进行保存设置的选项然后我们再次在底部的状态栏再次选择SEND对模块进行保存指令的发送好棒,我们的波特率设置就完成了,现在再重新启动u-center软件,你会发现现在通信已经是新设置的波特率了.关于以上波特率适合于u-blox模块系列的修改事宜:不过,我们的设置是钟对于飞扬科技的TIM-4H板为例,因为u-blox的模块的存储器分为几种:ROM版本,例如LEA-4S/4A,TIM-4S/4A系列E2PROM版本,如新出的LEA-4S-1,TIM-4S-18M Flash的版本,如LEA-4H/4P/LH/LP,TIM-4H/4P/LH/LPE2PROM版本及FLASH版本是可以通过u-center软件来完成配置及修改,但ROM版的如LEA-4S/4A及TIM4S/4A系列,内部是没有FLASH的,而这几个版本在中国为大多数客户选用,而且将涉及到调整波特率的问题,那么改变参数的方法如下:第一种方式需要通过外围的引脚定义接线来硬件配置波特率及启动参数等相对较常用的配置,这些内容可以参考u-blox的原厂的模块PDF文档第二种方式是每次在机器一开始运行时,便选用单片机来对模块进行控制,给模块的串口通信端发送相应的代码来控制不同的波特率,关于用单片机来控制当前模块的通信波特率,请参考以下章节:通过单片机来进行模块的操作现在客户更关心的问题是怎么样利用单片机或其它系统来对模块进行操作,最常见的就是对模块进行冷启动什么情况下进行冷启动呢?一是客户客观的需要,二是有时比如在信号特别差的地方,很久都没有办法收到GPS信号,有时转换地点也不行,这时候选用冷启动运行新的搜星定位反而会令到启动速度更快,在这种情况之下有些客户便选择冷启动让模块重新查找星系定位,设置方法如下:第一部: 在状态栏当中选择: UBX>>CFG(config)>>Startup option以在Startup option中,将会有热启动,温启动,冷启动三个选项,分别对应三种不同的启动方式,我们选择三种模式就会发现在蓝色框当中的16进制代码会发生相应的变化,注意蓝色框当中的红色框,那段代码是对模块启动控制三种方式的16进制代码,这些代码将是我们利用单片机对模块进行控制所需要用到的内容第二步:我们选中红色栏目当的内容,将红色框内的16进制代码通过单片机对模块的UART通信端口进行发送,发送三种不同的代码就可以通过单片机来控制GPS模块的热启动,温启动,冷启动三个状态了.好了,到这里大家对使用获取的代码来控制u-blox公司的GPS模块有一定的概念了,我们再回过来讲比较复杂的开机冷启动时配置ROM版本的LEA-4A/4S及TIM-4A/4S的波特率问题:关于用单片机控制ROM版本的LEA-4A/4S及TIM-4A/4S模块波特率的实例:第一步: 在状态栏当中选择: UBX>>CFG(config)>>PRT(ports),在Baudrate中选择不同的参数就会有不同的波特率,注意蓝色方框的代码变化第二步: 选择需要的波特率,提取蓝色方框中的红色框内的16进制代码,用单片机对模块的UART端口进行数据发送,上面谈到是在机器冷启动的时候便开始发送,模块便开始在当前的波特率下进行通讯工作.另外,若是以蓝牙等形式没有单片机等相连的直接发送模块的方式,也需要使用波特率设置,可以用上页中提到的用硬件外接跳线的方式设置波特率.休眠模块的设定及唤醒接下来我们再补充一下大家关心的休眠模式的设定:我们找到UBX--->CONFIG--->FXN(Fix Now Mode)1. 在如下设置窗口,设置参数,具体各个参数的作用,请参看我们的系统集成手册62~65示意图解释。
u-blox GPS硬件制作实例
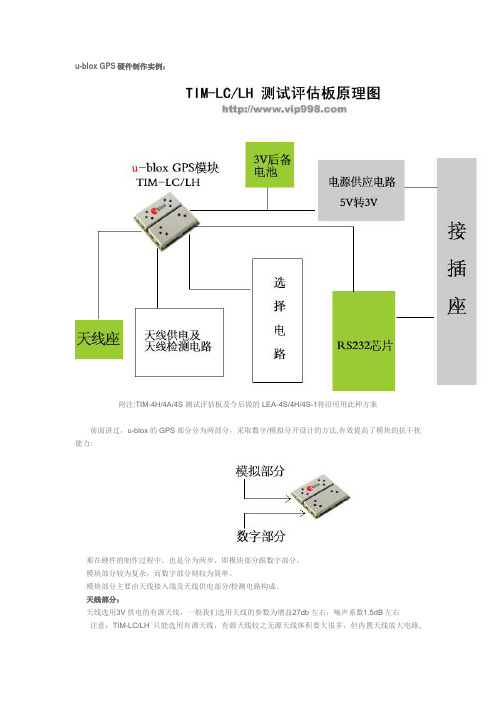
u-blox GPS硬件制作实例:附注:TIM-4H/4A/4S测试评估板及今后做的LEA-4S/4H/4S-1将沿用用此种方案前面讲过,u-blox的GPS部分分为两部分,采取数字/模拟分开设计的方法,有效提高了模块的抗干扰能力:那在硬件的制作过程中,也是分为两步,即模块部分跟数字部分。
模块部分较为复杂,而数字部分则较为简单。
模块部分主要由天线接入端及天线供电部分/检测电路构成。
天线部分:天线选用3V供电的有源天线,一般我们选用天线的参数为增益27db左右,噪声系数1.5dB左右注意:TIM-LC/LH只能选用有源天线,有源天线较之无源天线体积要大很多,但内置天线放大电路,在同轴馈线中已经包括3V供电,有源天线其实就是普通的陶瓷无源天线加上一个低噪声的LNA及滤波器,但LEA-4H/4S TIM-4H/4S的u-blox第四代产品已经支持有源及无源天线了.天线的做法及原理想当复杂,有源天线内核更是技术含量较高,由于涉及到硬件调试及高频,我们只能外购成品的天线,上图展示了两种天线的情况,左图为内核图片,右图为成品,选购时要注意天线的供电电压(u-blox是用3V的天线)及信噪比及增益等等.有源天线一般为水平放置,若需要其它角度的应用,则需要做更多的考虑,一般而言认为螺旋天线的方向性比平板天线要好,但我们测试时发现该种天线灵敏度不如水平放置的平板天线,会有3~5dbm的差距.天线接入模块较为复杂,从GPS有源天线天线接收的信号频率高达1.57524G,属于微波范围,故PCB 设计较为复杂,需要满足天线座到模块RF_IN端的阻抗匹配为50欧姆,相关设计可由专业RF工程师完成,相关软件可以从安捷伦网站下载专业RF仿真设计软件APPCAD进行高频线路铜箔宽度,长度,板材厚度等的计算,也可以点击以下链接高速下载:安捷伦公司出品的APPCAD软件Appcad的使用方法是安装完之后,选择Passive Circuits>>Microstrip:之后出现如下画面:选择线宽,板材厚度,长度,频率,材质等等,然后按Calculate Z0(F4)进行计算并调整,使Z0=50欧姆.对于没有实际RF经验的朋友建议选用测试评估板进行抄板,抄板时注意板材厚度,板材选择及铜箔线路宽度,若无实际把握,还需制作不同版本的RF线路进行软件测试评估灵敏度。
u-blox-GPS系统测试评估教案资料

这里将详细介绍以飞扬科技的u-blox公司GPS OEM评估测试开发板系统测试评估:u-blox GPS系统测试评估u-blo x测试评估软件简介:瑞士u-blox公司提供的专业测试软件为u-center,功能强大完善,可以测试数百种专业GPS功能,如星数,收星质量,及星空分布等各种各样的参数,同时内置模块软件升级功能,u-center软件被公认为目前全球在易用性,高精确性,功能完美性最完美的GPS专业测试软件,成为全球其它GPS厂商必备之测试软件,绝大部分可测试指标范围均能达到军用专业GPS测试标准.u-center软件的界面:COM口状态指示器:安装u-cneter软件之后,请连接TIM-LC/LH/4H的测试评估系统的USB端口或RS232端口,如果是RS232端口,还需要连上附件包中的USB转DC的专用供电线,软件底部状态栏为:连接USB硬件后,若正常工作则显示当前界面使用的COM口及波特率,状态指示灯将闪烁黄色信号,波特率指示灯将闪烁绿色信号,若硬件连接正确,COM口选择错误而波特率选择正确,波特率指示灯将不闪烁为灰色状态,若COM口选择正确而波特率选择错误码率,则波行率指示灯开始红色信号,如下图所示若USB或串口硬件连接无误,则请在COM选项中选择正确的COM口接口,或是在接多个外设GPS信号的情况下进行不同切换选择,利用我们的测试评估套件,可以一次同时测试多达三个GPS硬件系统:波特率的选择:TIM-LC/LH/4H测试评估板的默认波特率值为9600 接收卫星信号质量主界面:*此截图使用硬件为TIM-LH评估测试板,COM口测试,测试地点于阳台* 图中SV栏显示收星的质量,以db数来表示,右边菜单可以显示经纬度及高度等信息,具体内容如下:收星过程中,绿色信号表示收星信号已经完全到达GPS模块处理,若为蓝色信号则表示GPS尚在星历下载当中,若为红色则表示信号太弱,无法有效接受.收星的个数及db数成为主要的测试指标,一般而言,平面坐标定位需要三颗卫星,而进行高度海拨的三维定位则需要四颗及以上的卫星.相关主栏目菜单切换为图形选择方式,以选择不同的工作界面具体参考u-blox原厂手册:以下三个按钮可以切换查看相关的输出NEMA/UBX二进制及文本格式,格式具体含义请参考u-blox英文文档,u-blox GPS的UBX格式详细资料详见于评估资料包附件包软件内。
DIY设计之用开源单片机设置GPS+谷歌地图定位
DIY设计之用开源单片机设置GPS+谷歌地图定位
自己喜欢和驴友出游也喜欢和出海钓鱼,给自己做了个定位的黑匣子,给
大家分享一下!
实现功能:当你出门在外遇到困难时打开,硬件将通过手机卡上网,将个人
定位位置发到一个指定的IP 上,用我的谷歌地图软件来显示。
定位精度为0.5 米左右,也就是说我的两次定位分别显示了两个点,也就是
我们家窗子的宽度,民用的这个级别感觉不错,感觉也怪危险,坐等战斧。
板子做好后,又做了小板进行232 串口电平转换,可以用来监控串口的数据。
可以在调试时,将芯片间的通信数据用电脑测试到。
下图是用瑞士UBLOX 提供的软件进行模块测试的图片。
下图为VB 版的谷歌地图定位软件:
支持两种定位方式:
一是测试GPS 模块时,直接从串口经232 测试小收到定位数据,在地较上显示。
二是将电脑ip 写入单片机,单片机拔号上网,经GPRS 模块将数据传递到电脑上来。
前提是电脑是在线的。
下图为定位效果显示:天线我是放在阳台的,这个精度还可以,但时间久了
会有5 米左右的偏差。
tips:感谢大家的阅读,本文由我司收集整编。
仅供参阅!。
gps定位解决方案

篇一:GPS定位器常见问题及解决方式
GPS定位器常见问题及解决方式
问:通太短信发送指令到设备,什么缘故没有回答信息?
答:可能由以下几方面因素而致使:
一、设备无信号或断电关机,拨打设备上的SIM卡号,看是不是有正常的接通声音;
二、检查卡是不是开通短信功能;
3、检查卡上存储的短信,是不是太多;
卡欠费,GPRS效劳到期或套餐转变。
详情咨询SIM卡运营商(例:移动:1008六、联通:10010),卡是不是欠费,是不是开通了上网功能,上网功能是不是生效,套餐是不是有变更,若是是移
动的SIM卡,确认好GPRS接入点是不是是cmnet。
附:设备离线后假设不是以上情形,若是是GT02A,可尝试以下指令,按顺序发送 FACTORY,666666# (恢复出厂设置,回答OK表示成功),
答:若是显现该现象,不用疑心,请勿必检查一下安装线路是不是有问题。电压是不是超过设备的最大电压范围。因为,若是线接错,或电压太高时,车
辆熄火静止时,低电压,设备会工作。车辆点火行驶时,电压太高,会导至设备不工作。因此在平台上看见车辆静止时,显示在线(“静止”状态)
。车辆一行驶就离线,没有行驶轨迹。
问:爱车安如安在海外,港、澳、台等地利用?
是不是断电,供电电压、电流是不是在设备的额定电压、电流范围内。
2.设备无信号。
通过拨打设备内的SIM卡号,若是提示无法接通、不在效劳区,确实是这种情形。尽可能将车停在信号条件较好的环境。安装位置不要过于封锁,
不要有金属物摭挡,尽可能靠上安装。 (在地下车库、隧道、偏远闭塞等无信号的区域,会致使设备离线)
问:登岸密码忘了,提示“账号或密码错误”如何办?
答:若是您的登岸密码忘了,能够找销售给您设备的经销商,重置一下密码。密码被重置后,会自动恢复为 123456 经销商:登入系统后,点击“业务中心”,在屏幕左侧的客户列内外,找到要重置密码的客户名称,在名称上点击右键,会显现一个菜单,菜单上有“重
ublox协议格式

ublox协议格式(原创实用版)目录1.UBLOX 协议概述2.UBLOX 协议的结构和格式3.UBLOX 协议的应用4.UBLOX 协议的优势和局限性正文【1.UBLOX 协议概述】UBLOX(Ultra-Wideband Localization)协议是一种基于超宽带技术的室内定位协议。
该协议主要通过分析接收到的信号强度来确定设备在室内空间中的位置。
相较于传统的 GPS 定位技术,UBLOX 协议在室内定位方面具有更高的精度和稳定性。
【2.UBLOX 协议的结构和格式】UBLOX 协议的数据报文结构主要包括同步码、设备 ID、信道信息、距离信息和校验码等部分。
其中,同步码用于实现接收端与发送端的同步;设备 ID 用于区分不同的设备;信道信息用于表示当前接收的信道;距离信息用于表示设备与基站之间的距离;校验码用于检测数据传输过程中的错误。
【3.UBLOX 协议的应用】UBLOX 协议广泛应用于室内定位领域,如智能家居、工业自动化、医疗健康等。
借助 UBLOX 协议,各类设备可以实现高精度、高稳定性的室内定位,从而为用户提供更加便捷、智能的服务。
【4.UBLOX 协议的优势和局限性】UBLOX 协议的优势主要体现在以下几个方面:1.高精度:相较于传统的 GPS 定位技术,UBLOX 协议在室内定位方面具有更高的精度。
2.高稳定性:由于 UBLOX 协议不受室外环境因素的影响,因此在室内环境下具有较高的稳定性。
3.低功耗:UBLOX 协议的传输速率较低,因此设备的功耗也相对较低。
然而,UBLOX 协议也存在一些局限性,例如:1.传输速率有限:由于 UBLOX 协议的传输速率较低,因此不适用于对传输速率要求较高的应用场景。
2.设备成本较高:相较于传统的 GPS 定位技术,UBLOX 协议的设备成本较高。
gps gprs方案

GPS GPRS方案1. 导言本文档将介绍GPS(全球定位系统)与GPRS(通用分组无线服务)方案的结合应用。
首先将简要介绍GPS和GPRS的基本原理与工作方式,然后详细探讨将两者融合的方案,分析其应用领域和优势。
最后,将对GPS GPRS方案的实施流程和注意事项进行说明。
2. GPS基本原理与工作方式GPS是一种基于卫星的导航系统,由美国国防部研发,主要用于全球定位和定时。
GPS系统由一组卫星组成,这些卫星围绕地球轨道运行,向地面发送信号。
接收器通过接收来自多个卫星的信号并计算时间差,从而确定接收器的位置。
GPS系统具有高精度和全球覆盖的特点,广泛应用于汽车导航、船舶、飞行器和户外活动等领域。
3. GPRS基本原理与工作方式GPRS是一种无线通信技术,用于将数据传输到移动设备。
它建立在GSM(全球系统移动通信)网络之上,通过蜂窝网络实现数据传输。
GPRS采用分组交换的方式,将数据分割为多个小数据包,并通过蜂窝网络传输到目标设备。
GPRS具有高速传输、低成本和灵活性的优势,广泛应用于互联网接入、远程监控和远程设备管理等领域。
4. GPS GPRS方案的融合将GPS与GPRS融合应用可以实现实时位置追踪和远程数据传输的功能。
通过将GPS模块与GPRS模块相结合,可以将定位数据通过GPRS网络传输到远程服务器。
远程服务器可以解析接收到的数据,并在地图上显示设备的位置。
这种方案可广泛应用于车辆定位、物流管理、安防监控和户外运动等领域。
融合GPS和GPRS的方案具有以下优势:•实时定位:GPS提供高精度的位置信息,结合GPRS实时传输,可以实现对设备位置的准确追踪。
•远程监控:通过远程服务器和云平台,用户可以实时监控设备的位置和状态,提高管理效率。
•报警和安全:结合GPS和GPRS,可以实现设备离开指定区域时的报警功能,并保障设备的安全。
•数据分析:融合GPS和GPRS的数据可以进行深度分析,提供更多有价值的信息和统计数据。
u-blox6GPS模块

u-blox 6 GPS模块1 硬件描述1.2 结构图1 u-blox 6 模块结构由两个功能部分组成:射频(RF)和基带(Baseband)部分。
RF前端包括输入匹配元件、SAW(声表面波)带通滤波器、u-blox 6 RF-IC(带集成的LNA)和频率源。
基带部分,包括u-blox 6基带处理器、RTC晶体振荡器和附加的元件如:用于扩展编程和灵活性的可选FLASH内存1.3 电源管理1.3.1 电源连接u-blox6接收器有三个电源脚:VCC、V_BCKP和VDDUSB。
l VCC:主电源主电源接到VCC脚。
在运行期间,u-blox 6 GPS模块的消耗的电流变化非常大,特别是节电模式的时候。
系统电源应该能提供短时的峰值电流。
当从备份模式切换到正常模式或者启动时u-blox6模块先给内核域的内部电容充电,这时会产生一个很大的电流,对于低功耗的应用,使用节电或备份模式,电源或在模块输入的低ESR电容担负着这个充电电流。
l V_BCKP:备份电源在VCC失去的时候,实时时钟和备份RAM的供电通过V_BCKP脚。
这个备份电源使得u_blox6接收器能够以若启动或温启动方式(取决于VCC掉电的时间长度)从掉电中恢复过来,可以保持配置信息存储在备份RAM中不丢失。
如果无备份电池连接,接收器上电的时候会执行冷启动。
如果无备份电池,V_BCKP脚应该连接到GND。
只要VCC维持对u-blox6接收器的供电,备份电池就不会为RTC和备份RAM供电,这样可以节省电池消耗,见图2。
此时RTC和BBR的供电来自于VCC脚。
应当避免在V_BCKP脚上的高阻:在从主电源切换到备份电源期间,一个短时电流峰值能在这个脚上引起较大的电压降,这可能会出现问题。
图2备份电池和电压l VDD_USB:USB接口电源在LEA-6和NEO-6中,VDD_USB电源提供给USB接口,如果不使用USB接口,VDD_USB脚必须连接到GND。
uBloxGPS开发使用说明

uBlox-6M GPS开发板使用手册2013-01-281417电子工作室/宇新电子SBAS:WAAS,EGNOS,MSAS,GAGAN 启动时间:冷启动29 sec热启动<1 sec辅助启动<1 sec首次定位时间:<1 sec最大更新速率:<4Hz灵敏度:冷启动-144dBm跟踪灵敏度-160dBm捕获灵敏度-160dBm定位精度:Auto < 2.5mSBAS < 2m定时精度:RMS 30ns99% <60ns极限速度:500m/s运行温度:-40~85℃封装尺寸:16 ×12.2 ×2.4 mm1.5.3电气性能:工作电压: 2.7V~3.6V功耗:全速模式135mW 3.0VECO 模式129mW 3.0V备用电池: 1.4V~3.6V,25uA1.5.4接口协议:串行接口: 1 UART1 USB V2.0 全速12Mbit/s1 SPI其他接口: 1 时间脉冲输出1 外部中断输入协议:NMEA,UBX二进制1.5.5 芯片引脚引脚定义:第二章 开发板硬件介绍2.1 实物图2.2 结构布局开发板尺寸:35*65mm天线SMA 座电源开关电源指示灯5V 转3.3V 芯片 1117I2C 接口 USB 接口80mA 自恢复 保险 DC5V 插座 USB 选择 MS621充电电池uBlox-6M 装配孔PPS 指示灯 DB9 孔座: RS232 主要接计算机或单片开发板CMOS 串口接口,譬如:ARM 2440TTL 串口 接口 5V 的单片机 SPI 接口 TX 指示灯 RX 指示灯2.3 接口说明2.3.1 接口说明表标号名称说明1 NEO-6M主芯片NEO-6M主芯片2 电源输入DC5V输入2.3.2 I/O接口表第三章上位机软件使用说明3.1 连接方式3.2 使用串口调试助手1.打开光盘中的串口调试助手软件(uartassist.exe),根据自己电脑的实际串口选择串口号,默认的是COM1(我电脑的串口号是COM4)波特率:9600校验位:NONE数据位:8停止位:1设置好串口属性后,点击“打开”按钮,打开串口。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
GPS:1、Pin7:从EMI考虑,如果不使用USB接口,请将pin7接地。
2、去掉
R1,J1的Pin2直接与RF_IN相连。
3、请注意串口不要接反,GPS的TXD接MCU 的RXD,GPS的RXD接MCU的TXD。
4、pin22:如果不接备用电池可以将此处接到LEON-G100的pin2处,我们模块的pin2输出为2v。
5、pin23:给pin23供电的电源要满足①电压范围2.7~3.6v②纹波小于50mv③最大电流大于
100mA。
OK
GPRS:1、请确认PWR_3V8满足供电要求:①VCC范围为3.35V~4.5V,典型值
3.8V。
②峰值电流≥2.5A。
③Drop<400mV,不能有undershoot和overshoot。
④工作频率最好>1Mhz,至少要≥600Khz。
2、pin26~pin29:出于debug目的,如果不使用,建议增加测试点。
3、为了方便模块更新版本,在靠近模块端的TXD 和RXD上增加测试点。
4、请注意串口不要接反,G100的TXD接MCU的TXD,G100的RXD接MCU的RXD。
5、ESD9R3.3ST5G-0402适合于1.5G频点,未在GSM频点验证过。
建议参考下面一段做设计。
在布板时,如果LEON-G100和NEO-6M如果在同一块板上。
要求放在同一面,不然会存在二次回流焊的问题。
这是UBLOX给我的建议,你考虑一下。