汽车防抱死制动系统的滑模变结构控制器设计_刘柏楠
汽车防抱死制动系统的滑模变结构控制的开题报告
汽车防抱死制动系统的滑模变结构控制的开题报告1. 研究背景汽车防抱死制动系统(ABS)是一种安全装置,它能够防止车辆在制动时产生侧滑和打滑,并在保持驾驶稳定的同时有效地减少制动距离。
ABS采用了一些先进的控制技术,例如滑动模式控制(SMC),以解决其控制问题。
本研究旨在探讨ABS的滑模变结构控制以及其在汽车控制系统中的应用。
2. 研究目的本文研究的主要目的是探讨ABS的滑模变结构控制,并评估其在汽车控制系统中的效果。
具体研究目标包括:(1)介绍ABS的工作原理和特点;(2)详细介绍滑模变结构控制理论;(3)建立ABS的控制模型并进行仿真实验;(4)评估滑模变结构控制在ABS中的应用效果。
3. 研究内容3.1 ABS的工作原理和特点本研究将首先介绍ABS的工作原理和特点,包括ABS的控制框架、控制策略和主要组成部分。
3.2 滑模变结构控制理论滑模变结构控制是一种广泛应用于控制系统中的高级控制策略,它具有自适应和鲁棒性等优点,可以有效解决非线性系统失稳问题。
本研究将详细介绍滑模变结构控制理论,包括滑模面设计、滑模控制器设计和控制器参数的调节等。
3.3 ABS的控制模型及仿真实验基于ABS的控制框架和滑模变结构控制理论,本研究将建立ABS的控制模型,并进行仿真实验。
在仿真实验中,我们将通过对不同路面状态下的制动距离、侧滑角以及轮速等数据的收集和分析,来评估ABS滑模变结构控制的效果。
3.4 评估滑模变结构控制在ABS中的应用效果本研究的最后一个目标是评估滑模变结构控制在ABS中的应用效果。
通过收集并分析仿真实验数据,我们将评估滑模变结构控制在ABS中的控制效果,并与传统控制策略进行比较。
4. 研究意义本研究的意义体现在以下三个方面:(1)为汽车制造商提供一个新的解决方案,以提高汽车安全性能;(2)展示滑模变结构控制在汽车控制系统中的应用价值;(3)为进一步研究汽车防抱死制动系统提供了一种新的研究思路。
商用车RBF幂次滑模变ABS控制研究

商用车RBF幂次滑模变ABS控制研究李静;刘鹏;石求军;户亚威【摘要】针对商用车防抱死制动系统(ABS)的控制需求提出了商用车RBF幂次滑模变控制器;通过TruckSim软件建立了车辆多自由度动力学模型,同时通过Matlab/Simulink建立了RBF自适应调节的幂次滑模变控制器,通过RBF神经网络的自适应特性对滑膜变控制器的趋近率参数进行自适应调节;通过TruckSim与Matlab/Simulink联合仿真对ABS控制策略在高附着、低附着、对开路面工况下的制动控制进行了模拟与验证;仿真结果表明,在高附着、低附着、对开路面工况下制动时,该控制方法具有良好的控制效果.【期刊名称】《机械设计与制造》【年(卷),期】2018(000)011【总页数】5页(P158-162)【关键词】防抱死制动系统;滑模变控制;RBF神经网络;商用车【作者】李静;刘鹏;石求军;户亚威【作者单位】吉林大学汽车仿真与控制国家重点实验室,吉林长春 130022;吉林大学汽车仿真与控制国家重点实验室,吉林长春 130022;吉林大学汽车仿真与控制国家重点实验室,吉林长春 130022;吉林大学汽车仿真与控制国家重点实验室,吉林长春 130022【正文语种】中文【中图分类】TH16;U463.521 引言汽车防抱死制动系统(ABS)是指在汽车的制动过程中防止车轮抱死降低制动效能甚至引发侧滑危险的一种汽车安全装置。
配有ABS系统的汽车在制动时可以有效地防止车轮抱死拖滑,提高地面附着效果利用率,缩短制动过程中的制动距离并且能使汽车在制动的同时保持良好的转向能力。
目前,随着汽车的普及,防抱死制动系统已经作为提高汽车安全性的必备功能之一。
而随着中国交通运输的需求增加,商用车的保有量逐年上升,而商用车由于其不同于乘用车,其质心较高、质量较大、视野较为受限等原因,致使商用车的事故频频发生,针对于商用车行车安全性的研究逐渐受到人们的重视。
一种大型车辆防抱死控制器设计及仿真

具有8 个输入捕捉 / 输出比较 (c oc) [/ 通道 ,4 位或者2 l 个8 个 6
位的脉冲累加器 ( AD通道。当E T P C 模块运行时,l位的自由 6 定时器按照设定的时钟频率在¥ 00 F F 之间循环计时 , 0 0 S F F 当某个被 测信号的设定边沿到来时,输入捕捉逻辑立即将 自由
—
—
车 轮转速
制 动 力 矩
—
—
的实用和推广大大提 高了汽车 的主动安全性和操纵稳 定性 。
目前 ,我国轿车AB 已成为标准装备并实现国产化,而大 S 型车辆虽然也规定必须装备AB ,但大型车辆的AB 还主要依 S S
赖进 口。 因此 ,独立 自主研 发 高性 能 AB 产品 有 极大 的 市场 应 S
用 价值 。
-
地 面 制 动 力
, — — 风 阻
一
轮胎 滚动阻力
2 2 轮 胎Βιβλιοθήκη 型 .魔术公式是用三角函数的组合公式拟合轮胎试验数据 ,用
一
论文以某一国内客车为控制对象 ,以飞思卡尔新款 l位单 6
套形式相 同的公式就可以完整地表达轮胎的纵向力F 、侧向
力F 、回正 力矩 M 、翻 转 力 矩M 阻 力矩 M、 、 纵 向力 、侧 以及
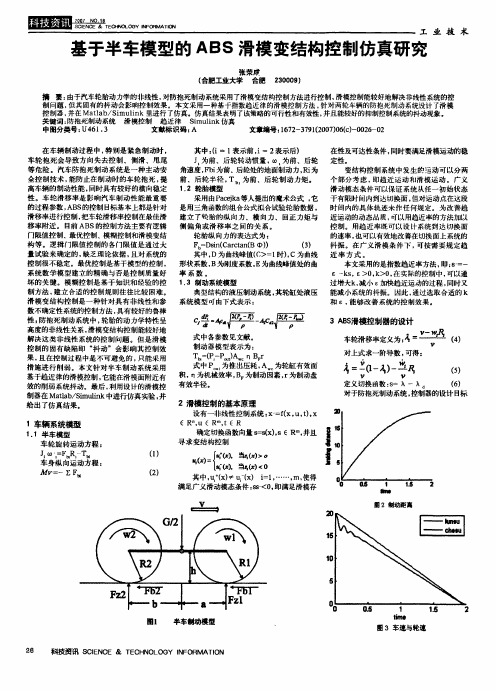
AB 控 制算 法 设 计要 求 ,由如 下 车体 、车轮 力 矩 平衡 式 和 滑移 S 率 定 义 式来 描 述 :
fm 一 u  ̄) t t
-
《 。 + + f曲。 ‘ 尺 R
l A= (v一∞R) /v
式中 册一 l4 / 汽车质量 图 1魔术公式轮胎模型原理 图 魔术公式的核心 内容是用三角函数的组合及一组 系数对轮 胎在静态载荷表现出的外特性 ,即轮胎纵 向力,横向力和回正
汽车ABS 系统模糊滑模变结构控制器的研究与设计
AUTOMOBILE DESIGN | 汽车设计汽车ABS系统模糊滑模变结构控制器的研究与设计李赫1 江薇21.吉林电子信息职业技术学院 吉林省吉林市 1320212.敦化职业技术学院 吉林省延边朝鲜族自治州 133700摘 要: A BS即防抱死制动系统对于汽车制动安全性能有重要影响,目前在实际应用中的ABS系统使用的绝大多数都是基于门限值的控制方法,由于实验条件有限,该方法受到数据的限制,无法达到很好的效果。
本文深入研究汽车防抱死机理以及变结构控制策略,并以此设计了滑模控制器,并在此基础上应用MATLAB软件实现了半实物仿真,取得很好效果。
关键词:防抱死制动系统;变结构控制策略;模糊滑模控制1 引言从80年代末起,一些高级轿车上开始安装ABS装置,随着汽车电控技术的不断发展,ABS装置现在己经成为轿车的必装部件,其基本功能就是通过传感器检测制动轮任意时刻的运动状态,并根据检测结果相应地调节制动器产生的制动力,从而防止车轮抱死,有利于汽车在制动时制动距离的缩短和方向稳定性的维持,使汽车行驶时的安全性得到保证。
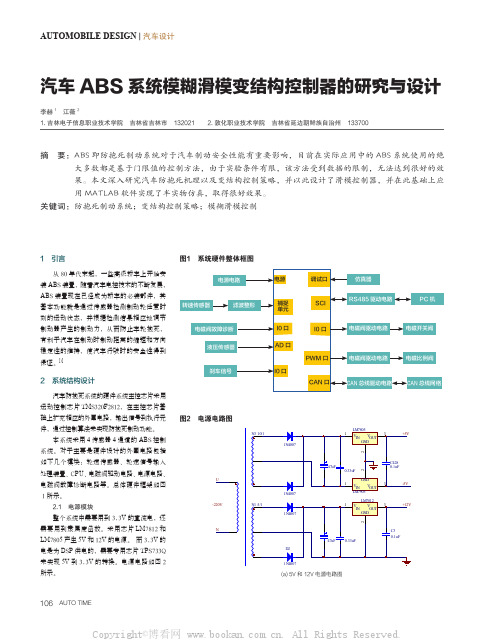
[1]2 系统结构设计汽车防抱死系统的硬件系统主控芯片采用运动控制芯片TMS320F2812,在主控芯片基础上扩充相应的外围电路,输出信号到执行元件,通过控制算法来实现防抱死制动功能。
本系统采用4传感器4通道的ABS控制系统。
对于主要是硬件设计的外围电路包括如下几个模块:轮速传感器、轮速信号输入处理装置、CPU、电磁阀驱动电路、电源电路、电磁阀故障诊断电路等。
总体硬件框架如图1所示。
2.1 电源模块整个系统中需要用到3.3V的直流电,还需要用到隶属度函数。
采用芯片LM7812和LM7805产生5V和12V的电源。
而3.3V的电是为DSP供电的,需要专用芯片TPS733Q 来实现5V到3.3V的转换。
电源电路如图2所示。
图1 系统硬件整体框图图2 电源电路图(a) 5V和12V电源电路图AUTOMOBILE DESIGN | 汽车设计时代汽车 为了减少干扰及匹配电压,采取光电隔离。
模糊滑模控制在ABS滑移率控制中的运用研究的开题报告

模糊滑模控制在ABS滑移率控制中的运用研究的开题报告一、选题背景随着汽车的普及和发展,ABS(防抱死系统)已成为汽车被广泛使用的一种基础系统之一。
ABS能够有效地提高汽车行驶时的安全性,减少发生车祸的概率。
然而,在实际使用中,ABS的控制算法需要不断地改进和优化,以满足不同的应用需求。
模糊滑模控制是一种高效、鲁棒、稳定的控制技术,在控制系统中有着广泛的应用。
其基础是从模糊控制和滑模控制两种方法中各自优点进行综合利用,以期达到更好的控制效果。
因此,将模糊滑模控制技术应用于ABS滑行率控制中,可以有效地提高ABS的控制精度和鲁棒性。
因此,本文选择模糊滑模控制在ABS滑移率控制中的运用作为研究对象,希望通过本次研究取得一定的成果,为ABS的控制算法的研究和发展做出一定的贡献。
二、研究目的本研究旨在探究模糊滑模控制在汽车ABS滑移率控制中的应用,提高其控制效果和鲁棒性,为实现更快、更准确、更安全的ABS控制算法提供一定的理论和实践支持。
三、研究方法和步骤本研究将采用理论分析和数值模拟相结合的方法进行。
具体步骤如下:1.研究ABS的滑移率控制算法,分析其优缺点和应用范围;2.研究模糊滑模控制理论,分析其基本原理和特点;3.将模糊控制和滑模控制相融合,建立模糊滑模控制模型,并进行数值仿真;4.对模糊滑模控制模型进行实验验证,分析模型的控制效果、鲁棒性和稳定性,并与传统滑移率控制算法进行比较分析;5.总结研究结果,提出改进建议和未来研究方向。
四、预期结果本研究预计能够通过应用模糊滑模控制技术,提高ABS的控制精度和鲁棒性,实现更快、更准确、更安全的控制效果。
同时,本研究还将探讨模糊滑模控制技术在汽车控制系统中的应用前景,并为其未来研究提供一定的参考和指导。
基于智能滑模控制的线控防抱死系统(ABS)研究的开题报告

基于智能滑模控制的线控防抱死系统(ABS)研究的开题报告一、研究背景与意义线控防抱死系统(ABS),是一种常见的汽车制动辅助系统,其作用是在车辆制动时防止车轮速度过快减缓,导致车轮抱死失控的情况出现,从而保证了行车安全。
传统的ABS采用PID等传统控制方法实现,但具有模型参数变化、外部干扰等问题,难以达到理想的控制效果。
因此,基于智能滑模控制的ABS研究就显得尤为重要。
智能滑模控制技术能够克服传统控制方法的缺陷,具有非线性自适应、鲁棒性强等特点。
因此,基于智能滑模控制的ABS研究不仅能提高ABS的精度和稳定性,还在未来的自动驾驶汽车中具有广泛的应用前景。
二、研究内容及方法本研究将基于智能滑模控制理论,研究线控ABS的控制方法和控制策略。
主要包括以下内容:1.分析ABS系统的工作原理和复杂性,绘制系统控制框图,确定控制目标和性能指标。
2.基于智能滑模控制理论,建立线控ABS的控制模型,设计ABS系统的智能控制器,并实现控制器的参数调节和优化。
3.通过仿真实验和实际实验相结合的方法,验证智能滑模控制方法的控制性能及稳定性,与传统控制方法相比较,评价其优劣。
三、预期成果及意义通过本研究,将能开发出一种基于智能滑模控制的ABS控制方法,该方法相比于传统的PID等控制方法,具有更高的自适应性和鲁棒性,能够更加准确地控制ABS系统的输出,提高系统的稳定性和控制精度。
在智能汽车研究领域,该方法还有广泛的应用前景。
四、研究计划及进度安排1.前期准备:对目前ABS的工作原理和控制方法进行系统学习和研究,以及各种智能滑模控制方法的分析。
2.中期计划:基于智能滑模控制理论,建立线控ABS的控制模型,设计ABS系统的智能控制器,并实现控制器的参数调节和优化。
3.后期计划:通过仿真实验和实际实验相结合的方法,验证智能滑模控制方法的控制性能及稳定性,与传统控制方法相比较,评价其优劣。
预计完成时间为12个月,具体进度安排如下:第1-3个月,阶段性成果:对ABS系统工作原理和控制方法进行学习;各种智能滑模控制方法的分析。
滑膜变结构控制在两轮不稳定小车系统中的应用

滑膜变结构控制在两轮不稳定小车系统中的应用
刘学超;屈胜利;孙弘;栗维克
【期刊名称】《航空计算技术》
【年(卷),期】2007(37)5
【摘要】将滑膜变结构控制应用于具有非线性及强扰动性的两轮不稳定小车系统.在给定系统的硬件结构及数学模型的基础上,设计出基于等速趋近律,指数趋近率和准滑动模态的变结构控制器.通过三种控制器与零极点控制器仿真比较,得出滑膜变结构控制可进一步削弱抖振,并验证其对外界干扰和系统参数变化不敏感性的优点.【总页数】4页(P42-44,48)
【作者】刘学超;屈胜利;孙弘;栗维克
【作者单位】西安电子科技大学,机电工程学院,陕西,西安,710071;西安电子科技大学,机电工程学院,陕西,西安,710071;西安电子科技大学,机电工程学院,陕西,西安,710071;西安电子科技大学,机电工程学院,陕西,西安,710071
【正文语种】中文
【中图分类】TP273
【相关文献】
1.往返小车及上卷小车在自动上卷系统中的应用 [J], 张俊;王宏博;张康
2.两轮不稳定小车系统中变结构控制器的设计及改进 [J], 孙泓;屈胜利;刘学超;栗维克
3.变结构控制在两轮平衡小车中的应用 [J], 张跃宝;屈胜利;赵勇;房立军
4.基于Lie理论对两轮不稳定小车的变结构控制 [J], 朱加辉;屈胜利;李炎昭;孙建勤
5.两轮不稳定小车系统中变结构控制器的设计及改进 [J], 刘学超;屈胜利;孙弘;栗维克
因版权原因,仅展示原文概要,查看原文内容请购买。
基于半车模型的ABS滑模变结构控制仿真研究
‘ , 一‘. 月‘. _I w ~种 种 种 二 - ‘ e ‘ 种 种 ‘一刁日公洲 卜 ‘二 - 目 二‘ ~ ,二二
_ 鹉
‘心
凤兀 万 二
P
. _ 反更 五 丁j
”‘ I P
’y 一
3 AB 滑模控制器的设计 S
式中各参数见文献。 制动器模型表示为:
车 滑 率 义 人= 轮 移 定 为
轮胎纵向力的表达式为:
在性及可达性条件, 同时要满足滑模运动的稳
定性。
变结构控制系 统中发生的运动可以分两 个部分考虑, 即趋近运动和滑模运动。广义 滑动模态条件可以保证系统从任一初始状态 于有限时间内到达切换面, 但对运动点在这段 时间内的具体轨迹未作任何规定。为改善趋 近运动的动态品质, 以用趋近率的方法加以 可
(3)
本文采用的是 指数趋近串方法, =一 即:5
5 一 。 0, , ks, > k>0 在实际的控制中, 可以通 过增大k , 。 减小 加快趋近运动的过程, 同时又 能减小系统的抖振。因此, 通过选取合适的k
和 ‘, 能够改善系统的控制效果。
1.3 制动系 统模型
典型结构的液压制动系统, 其轮缸处液压
N 0 . 18
工 业 技 术
SC 〔NCE & TEQ 于 《几OOY I叫 O日 F MAT1 N 0
对桥梁钢构件锈蚀 影响 的分析
蔡绪梅 ( 山东省潍坊市坊子区公路局)
门限值控制、 最优控制、 模糊控制和滑模变结 构等。逻辑门限值控制的各门限值是通过大 里试验来确定的, 缺乏理论依据, 且对系统的 控制很不稳定。最优控制是基于模型的控制, 系统数学模型建立的精确与否是控制质量好 坏的关键。模糊控制是基于知识和经验的控 制方法, 建立合适的控制规则往往比较困难。 滑模变结构控制是一种针对具有非线性和参 数不确定性系统的控制方法, 具有较好的鲁棒 性, 防抱死制动系统中, 轮胎的动力学特性呈 高度的非线性关系, 滑模变结构控制能较好地 解决这类非线性系统的控制问题。但是滑模 控制的固有缺陷即 “ 抖动”会影响其控制效 果, 且在控制过程中是不可避免的, 只能采用 措施进行削弱. 本文针对半车制动系统采用 基干趋近律的滑模控制, 它能在滑模面附近有 效的削弱系统抖动。最后, 利用设计的滑模控
汽车防滑刹车系统滑模变结构控制器设计
汽车防滑刹车系统滑模变结构控制器设计袁跃;宋锦春;武氏怀秋【摘要】Sliding-modevariable structure control has good rapidity and strong robustness,which is very suitable for the strong nonlinearity of anti-lock braking system. An improved exponential approach law of variable structure controller based on sliding mode method was proposed,aim at the high non-linearity of slid-proof braking system.In the control strategy,the most optimal slip rate is used as the objective function to design sliding surface of sliding mode controller, Which overcomes the weak robustness of"boundary layer method",the method used in the paper effectively diminishes the chatter of the Sliding-mode variable structure control and improves the quality of control.And the simulation results illustrate that anti-lock braking systemcan track the optimal slip ratio well,the brake efficiency is high and the control method is reasonable and effective.%滑模变结构控制具有较好的快速性和较强的鲁棒性,非常适合高度非线性的汽车防滑刹车控制系统.针对汽车防滑刹车系统中存在的高度非线性问题,设计了一种基于改进的指数趋近律的滑模变结构控制器,在控制策略中,以最佳滑移率为目标函数,设计了滑模控制器的滑模面,克服了"边界层法"弱鲁棒性的特点,有效的减小了滑模变结构控制算法中抖动的影响,提高了控制品质.仿真结果表明,汽车防滑刹车系统能够很好的跟踪最佳滑移率,刹车效率高,控制方法合理有效.【期刊名称】《机械设计与制造》【年(卷),期】2018(000)005【总页数】4页(P35-37,40)【关键词】防抱死制动系统;滑模控制;滑移率;指数趋近律【作者】袁跃;宋锦春;武氏怀秋【作者单位】东北大学机械工程与自动化学院,辽宁沈阳110819;东北大学机械工程与自动化学院,辽宁沈阳110819;东北大学机械工程与自动化学院,辽宁沈阳110819【正文语种】中文【中图分类】TH16;U4611 引言随着汽车科技的高速发展,汽车的行驶速度越来越高,对于汽车的行驶性能方面的安全要求也越来越高,尤其是紧急情况下的制动性能。
1127最终车辆工程专业毕业设计一览表
1127最终车辆工程专业毕业设计一览表车辆工程专业12届毕业设计(论文)一览表编号选题名称选题来源选题类型名称(本专业分类)学生姓名指导教师姓名职称1 多片湿式离合器及其试验装置设计生产实践底盘王俊郭新民荆崇波教授副教授2 柴油机冷EGR系统文丘里管的设计计算科学研究发动机李亚慧郭新民尹旭峰教授讲师3 轻型客车493发动机过热问题的分析改进生产实践发动机梁大伟郭新民尹旭峰教授讲师4 公交车后置发动机冷却系统性能改进研究生产实践发动机冯燕华郭新民尹旭峰教授讲师5 DA471QA发动机可变式配气机构的改进方案生产实践发动机刘洋郭新民尹旭峰教授讲师6 车用发动机冷却水泵驱动方式的改进研究生产实践发动机邹勋冠郭新民尹旭峰教授讲师7 柴油机冷EGR与传统EGR的对比分析研究科学研究发动机朱鼎郭新民尹旭峰教授讲师8 无轨有线电动轿车自动变线装置研究生产实践新能源邓宗云郭新民吴维教授讲师9 车用冷EGR自控冷却系统的研究科学研究发动机董志强郭新民吴维教授讲师10 轻型货车制动系统性能的改进研究生产实践底盘陈迪郭新民吴维教授讲师11 汽车修理厂气动抽油机的改进研究生产实践发动机施旭东郭新民吴维教授讲师12 比亚迪F3汽车制动系统的改进研究生产实践底盘彭泽明郭新民吴维教授讲师13 比亚迪双模混合动力车汽油机的选配研究科学研究发动机麦嘉锋郭新民吴维教授讲师14 EQ1044轻型货车前悬架的选配研究科学研究底盘旋楚平郭新民吴维教授讲师15 装载机冷却系统过热问题的改进研究生产实践发动机雷军军郭新民吴维教授讲师16 基于CATIA的汽车座椅调节机构的设计生产实践车身电器肖茂清陈思忠教授助教17 无障碍公交车踏板装置的设计生产实践车身电器彭晓嘉陈思忠杨延勇教授助教18 汽车前大灯弯道照明调节系统设计生产实践车身电器李嘉豪陈思忠杨延勇教授助教19 汽车胎压监测与自动加气装置设计科学研究底盘黄耀飞苑士华宋长森教授工程师20 线控电动四驱模型车的设计与制作生产实践底盘杨皓光苑士华宋长森教授工程师21 圆盘式磁流变液离合器设计科学研究底盘林伟雄苑士华邹浙湘助教22 基于Jeep wrangler越野车分动器结构设计科学研究底盘袁志苑士华邹浙湘教授助教23 电动汽车无线充电技术研究科学研究新能源矫延圣苑士华邹浙湘教授助教24 电动汽车充电站监控系统研究生产实践新能源林松江苑士华邹浙湘教授助教25 基于Freeform汽车造型设计自拟车身电器程成王宏甫邹浙湘教授助教26 客车骨架正面碰撞仿真与数值分析科学研究车身电器刘斌王宏甫邹浙湘教授助教27 汽车后桥防滑差速器及主减速器设计生产实践底盘周崇王宏甫邹浙湘教授助教28 驻车加热器内部燃烧室结构优化设计科学研究发动机王远平王宏甫邹浙湘教授助教29 高尔夫轿车涡轮增压器的应用研究自拟发动机黄汗青王宏甫文长海教授技师高30 现代叉车起重机构的选型设计自拟车身电器谭特王宏甫文长海教授高级技师31 现代悦动轿车后悬架选配研究自拟底盘张伟超王宏甫文长海教授高级技师32 电动微型乘用车车架结构设计生产实践车身电器徐冬张军文长海副教授高级技师33 随速液压助力转向系的应用研究自拟底盘陈永星王宏甫文长海教授高级技师34 五十铃发动机冷却风扇改进方案研究自拟发动机王宇晴王宏甫文长海教授高级技师35 广通纯电动客车(GTQ6117BEVB)电力驱动系统的优化设计科学研究新能源胡笑胡纪滨赖建生教授讲师36 广通混合动力客车(GTQ6117HEWG)电力驱动系统的优化设计科学研究新能源孟飞胡纪滨赖建生教授讲师37 电动助力转向传动机构的设计研究科学研究底盘甘泓泉胡纪滨周靖教授助教38 液压挖掘机的轻量化设计研究科学研究车身电器刘家钰胡纪滨周靖教授助教39 轿车天窗运动执行机构的优化设计与研究科学研究车身电器焦若冰胡纪滨周靖教授助教40 SUV车自动变速器换挡规律的研究科学研究底盘陈家海胡纪滨周靖教授助教41 基于虚拟样机技术的柴油机调速器设计与分析科学研究发动机罗峻山胡纪滨周靖教授助教42 汽车空气悬架系统导向机构设计与研究生产实践底盘黄诗玲胡纪滨周靖教授助教43 大众速腾双离合器结构设计生产实践底盘何旭然宋黎王思卓教授助教44 宝马120i万向传动装置设计生产实践底盘石光宋黎王思卓教授助教45 HF10汽车后桥总成设计生产实践底盘张春强宋黎王思卓教授助教46 基于单片机的柴油车排放处理系统研究科学研究发动机郑小朝宋黎王思卓教授助教47 汽车保险管理信息系统设计生产实践营销管理刘庄宋黎吴德旺助教48 汽车俱乐部会员管理信息系统设计生产实践营销管理林伟成宋黎吴德旺教授助教49 停车场管理信息系统设计生产实践营销管理吴钦雄宋黎吴德旺教授助教50 驾校学员管理信息系统设计生产实践营销管理刘小灏宋黎吴德旺教授助教51 汽车理赔管理信息系统设计生产实践营销管理梁永健宋黎吴德旺教授助教52 机场牵引车液力传动系统的匹配计算科学研究底盘钟钦财荆崇波周靖副教授助教53 轻卡驾驶室的人机工程学设计科学研究车身电器雷光典荆崇波周靖助教54 保时捷可变气门正时结构的设计研究科学研究发动机钟艺钊荆崇波周靖副教授助教55 旋转式立体停车位的设计自拟营销管理孙文明荆崇波王思卓副教授助教56 大众1.4TDSG变速器性能研究科学研究底盘何蔚明荆崇波王思卓副教授助教57 基于MC9S12DG128单片机的智能模型车系统研究科学研究车身电器陈志华荆崇波王思卓副教授助教58 轻型汽车用前独立悬架导向机构设计生产实践底盘张旭鹏陈思忠邹浙湘副教授59 电动汽车电池管理系统研究生产实践新能源徐兴石宝山邹浙湘副教授助教60 电动汽车车载充电系统设计科学研究新能源张蜀湘张军邹浙湘副教授助教61 基于车辆模型的半主动悬架系统设计生产实践底盘黄健王宇宁包凡彪副教授讲师62 混合动力车辆驱动系统研究与设计生产实践底盘陈锦坤王宇宁包凡彪副教授讲师63 汽车电池检测系统设计社会实践新能源朱俊文王宇宁包凡彪副教授讲师64 丰田皇冠制动器结构设计生产实践底盘周舟李江天包凡彪副教授65 捷达汽车膜片弹簧离合器总体结构设计生产实践底盘张东海李江天包凡彪副教授讲师66 机动车价格评估系统设计生产实践营销管理胡琪拓李江天包凡彪副教授讲师67 电动汽车高效混合动力系统设计生产实践新能源胡秋阳梁树林宋长森高工工程师68 大型电动客车空调系统设计与匹配生产实践新能源李静桦梁树林宋长森高工工程师69 中型电动汽车空调系统设计与匹配生产实践新能源彭亚楠梁树林高工工程师70 一体化电动助力转向系统设计生产实践新能源覃基铨江瑞华宋长森高工工程师71 电动汽车快速充电桩设计生产实践新能源曹耀云江瑞华宋长森高工工程师72 车用一体化电动螺杆气泵设计生产实践新能源余伟杰江瑞华宋长森高工工程师73 电动微型乘用车减速器设计科学研究底盘丁登太张军赖建生副教授讲师74 帝豪EC7驱动防滑控制系统优化设计与分析科学研究底盘聂郁星焦黎赖建生副教授讲师75 基于Matlab的汽车EBD控制策略影响因素仿真研究科学研究底盘庾楚勇焦黎副教授讲师76 CIVIC Hybrid IMA系统的优化仿真设计生产实践新能源谢振标焦黎赖建生副教授讲师77 电动车辆开关磁阻电动机控制策略研究与分析科学研究新能源李镇辉焦黎赖建生副教授讲师78 汽车4S店人才结构对企业发展的影响分析社会实践营销管理陈俊鹏付铁赖建生副教授讲师79 汽车4S店员工流失原因分析及对策研究社会实践营销管理郑泽鑫付铁赖建生副教授80 2011款普锐斯THS-Ⅱ系统的优化仿真设计生产实践新能源赖振志付铁赖建生副教授讲师81 车辆保险定损系统的设计生产实践营销管理付饶付铁赖建生副教授讲师82 基于云雀GHK7060型轿车浮动钳盘式制动器设计生产实践底盘颜其林唐先智邹浙湘讲师助教83 磁流变阻尼器建模及其仿真研究生产实践底盘林文杰唐先智邹浙湘讲师助教84 双行星排动力耦合器的设计与研究生产实践底盘杨晓畅唐先智讲师助教85 基于制动轨迹的汽车制动性能研究科学研究底盘肖恒良唐先智邹浙湘讲师助教86 工程机械传动实验台设计生产实践底盘刁彦超宋长森荆崇波工程师副教授87 电动汽车能源管理系统研究生产实践新能源罗庭天宋长森符兴锋工程师工程师88 基于MCS-51单片机的电动机控制系统设计生产实践新能源黄晓东宋长森符兴锋工程师工程师89 电动汽车高压安全性能研究生产实践新能源林广昌宋长森符兴锋工程师工程师90 丰田锐志动力系统改装生产实践发动机何锦路包凡彪讲师讲师91 丰田皇冠点火系统的故障分析与研究生产实践发动机符芳达包凡彪陈利娜讲师讲师92 丰田皇冠轿车驱动桥总体结构设计生产实践底盘谭智业包凡彪蔡云讲师讲师93 马自达睿翼悬架系统设计生产实践底盘杨贵柱包凡彪陈利娜讲师讲师94 MG6轿车制动性能计算与仿真生产实践底盘夏欢欢包凡彪陈利娜讲师讲师95 汽车巡航控制系统设计生产实践底盘黄志宏包凡彪陈利娜讲师讲师96 基于MCS-51单片机汽车倒车雷生产实践底盘关永豪包凡彪蔡云讲师讲师97 汽车胎压监测系统设计生产实践底盘李宇佳包凡彪蔡云讲师讲师98 发动机冷却风扇控制系统设计生产实践发动机龙钊包凡彪陈利娜讲师讲师99 基于信号频域分析的发动机电控系统设计生产实践发动机吴彬(3)包凡彪陈利娜讲师讲师100 凯越轿车电控空气悬架的选配研究自拟底盘廖智雄魏超文长海讲师高级技师101 捷达电控柴油喷射发动机的应用研究自拟发动机吴土权魏超文长海讲师高级技师102 轿车前大灯随动转向控制装置研究自拟车身电器林文达魏超文长海讲师高级技师103 捷达轿车空气悬架气压系统设计生产实践底盘洪杰李雪原吴德旺讲师助教104 捷达轿车发动机故障诊断专家系统设计生产实践发动机傅伟斌李雪原吴德旺讲师助教105 泊车辅助系统设计生产实践车身电器屈国庆李雪原吴德旺助教106 丰田4s店管理信息系统设计生产实践营销管理黎文莱黎长青吴德旺工程师助教107 汽车悬架试验台设计生产实践底盘肖越彬黎长青吴德旺工程师助教108 发动机拆装翻转台架液压系统设计生产实践底盘李志文黎长青吴德旺工程师助教109 电动观光汽车总体设计生产实践车身电器唐辉鹏黎长青吴德旺工程师助教110 驻车制动液压助力装置设计生产实践底盘蔡丰茂黎长青吴德旺工程师助教111 DABS10-5型变速器自动换档装置设计生产实践底盘詹婉玲符兴锋王思卓助教112 现代索纳塔轿车制动器设计生产实践底盘吴彬(1)符兴锋王思卓工程师助教113 大宇四轮驱动汽车自由轮毂结构设计生产实践底盘谢平符兴锋王思卓工程师助教114 基于89C51单片机的车用RFID系统设计社会实践车身电器廖佳虹符兴锋王思卓工程师助教115 基于日产帅客的房车改装设计生产实践车身电器赵金迪刘乐涛杨延勇工程师助教116 高度可调式安全带设计生产实践车身电器冯求舜刘乐涛杨延勇工程师117 汽车副仪表台的优化设计生产实践车身电器利仲达刘乐涛杨延勇工程师助教118 本田飞度两厢汽车后门的改进设计生产实践车身电器周泓泓刘乐涛杨延勇工程师助教119 电动微型乘用车电池箱结构设计生产实践新能源郭婷张军杨延勇副教授助教120 载货汽车车载传送带系统设计生产实践车身电器崔文郁张梦云杨延勇工程师助教121 汽车摩擦传动无级变速器设计生产实践底盘郭锐焕苑士华杨延勇教授助教122 电动车的仿生造型设计生产实践车身电器付鹏程张梦云杨延勇助教123 基于CAD的商用卡车造型设计的应用生产实践车身电器王裴张梦云杨延勇工程师助教124 SUV多功能行李箱的结构改进设计生产实践车身电器廖岭淞张梦云杨延勇工程师助教125 车载自行车自动升降装置的改进设计生产实践车身电器陈春潮张忠杨延勇工程师助教126 半挂车用全轮转向机构设计生产实践底盘山旭陈思忠杨延勇教授助教127 汽车前悬架仿真分析及优化方法研究科学研究底盘罗泽安周靖工程师助教128 轮式装载机虚拟设计与联合仿真研究科学研究底盘杜鹏张忠周靖工程师助教129 基于虚拟样机技术的自卸车举升机构设计科学研究车身电器梁世韬张忠周靖工程师助教130 麦弗逊式前悬架的改进设计研究科学研究底盘吴泓扬张忠周靖工程师助教131 液压盘式制动器的设计研究科学研究底盘梁昊瀚张忠周靖工程师助教132 轿车二次空气系统控制方案的自拟底盘谢祥秀彭增雄文长海实验师高级技师133 小轿车MT变速器设计生产实践底盘邓继春文长海苑士华高级技师教授134 索纳塔干式双离合器的设计计算自拟底盘蓝观胜彭增雄文长海实验师高级技师135 汽车保险诈骗成因分析及应对策略研究社会实践营销管理郑义志赖建生潘勤学讲师讲师136 载重汽车变速器设计生产实践底盘林聪赖建生苑士华讲师教授137 汽车噪声成因分析及消除策略生产实践发动机高冲赖建生潘勤学讲师138 汽车理赔流程的优化设计及效果分析社会实践营销管理林聪赖建生潘勤学讲师讲师。
ABS汽车防抱死制动系统设计

ABS汽车防抱死制动系统设计优秀设计摘要ABS系统可以显著提高或改善汽车紧急制动时的操控性和稳定性,缩短了制动距离,是一种新型的汽车电子控制产品,并得到了越来越广泛的应用。
本文以轿车为研究对象,展开对汽车ABS的研究。
主要完成了以下的工作:通过对单个车轮时的受力分析确定了影响车轮附着系数的主要因素;通过比较电磁感应式轮速传感器和霍尔效应传感器的性能优缺点,采用并设计了霍尔效应式轮速传感器;通过对控制结构的分析设计了以INTEL公司生产的80C196KC单片机为核心的实时控制系统,包括信号输入电路、控制输出电路、驱动电路等硬件部分;经比较各种控制方案,确定了“逻辑门限制法”作为控制方案,并选用加速度和滑移率的组合作为控制参数。
采用事件门限来计算车轮的转速。
本文通过学习比较根据所学只是设计了ABS控制系统。
从理论上实现了ABS 的控制功能,完成了设计要求。
在设计过程中对汽车制动理论和制动装置有了较为深入的了解,扩大了自己的知识面,自己解决问题的能力也得到了提高。
关键词:防抱死制动系统电子控制单元门限值滑移率轮速传感器ABSTRCTAnti-lock Braking System (ABS) is an important device to improve the active safety of vehicle. ABS can greatly improve steering control ability during the brake maneuver and shorten stopping distance. Today with the improvement of the vehicle speed, ABS is applied widely.With the car as the research object, the research on ABS hasbeen carried on. And a series of work were finished:The dynamic situation of wheel was analyzed. Then, the model of hydraulic ABS was built and assured main complication affect the wheeler appendiculate coefficient.By comparing the capability of electromagnetism rotate speed sensor with Houer rotate speed sensor, we chose the later, and have designed a sensor of this kind.Via analyse the control system structure, we have designed a real-time system with the singlechip 80c196kc produced by Intel company .It comprises with signal input, singlechip system, output, drive electro circuit and otherwise parts of hardware segment.After comparing the different projects of the controllers, the method of logic rate has been comfirmed, and the combination of acceleration and slippage rate as been chose as control parameters. The time gate method to calculate the wheel rotate speed was adopted.In this paper, based on the knowledge I have mastered, I designed a ABS system and realized the control function in theory, accomplished my assignment. I have gotten a in-depth understand of motorcar trig theory and equipment. It widen my knowledge scope, improved my ability of solving problems.Kyewords: ABS electronic control slippage gate rotate speed sensor目录1 防抱死制动系统概述 (1)1.1 ABS的功能 (1)1.2 防抱死制动系统的发展历史 (2)1.3 防抱死制动系统的发展趋势 (3)1.4 国内ABS系统研究的理论状态和具有代表的ABS产品公司 (5)2.1 制动时汽车的运动 (7)2.1.1 制动时汽车受力分析 (7)2.1.2 车轮抱死时汽车运动情况 (8)2.2 滑移率定义 (10)2.3 滑移率与附着系数关系 (10)2.4 制动时车轮运动方程 (12)2.5 采用防抱死制动的必要性 (13)2.6 防抱死制动系统的基本工作原理 (14)3 防抱死制动系统硬件设计 (18)3.1 防抱死制动系统的布置形式与组成 (18) 3.1.1防抱死制动系统的布置形式 (18) 3.1.2防抱死制动系统的基本组成 (21) 3.2 80C196KC最小系统 (23)3.2.1 CPU简介 (24)3.2.2 时钟电路设计 (28)3.3 防抱死制动系统轮速传感器选择 (29) 3.3.1霍尔传感器的设计 (32)3.3.2霍尔开关电路的选择 (32)3.3.3传感器齿盘的设计 (34)3.4 防抱死制动调压系统工作过程9 (35) 3.5 电源设计 (39)3.6 信号输入电路设计 (39)3.7 电磁阀驱动电路的设计 (40)3.8 泵电机驱动电路的设计 (43)3.9 ABS系统报警LED灯设计 (44)3.10 EPROM和RAM的扩展 (45)3.11故障诊断硬件电路设计 (47)3.12硬件抗干扰设计 (48)3.13车轮制动器的选择 (52)4.1 控制方案和控制参数的选取 (55)4.2 控制参数及其计算 (56)4.2.1门限减速度的求取 (56)4.2.2门限加速度的求取 (58)4.2.3路面识别技术 (58)4.2.4车身参考速度的确定 (58)4.3 控制过程 (62)4.4 程序设计 (65)5 结论与展望 (67)5.1 研究工作总结 (67)5.2 防抱死制动系统发展方向 (67)参考文献 (70)英文翻译 (68)附录 (77)致谢 (84)1 防抱死制动系统概述1.1 ABS的功能汽车ABS在高速制动时用来防止车轮抱死,ABS是英文Anti-lock Brake Syetem的缩写,全文的意思是防抱死制动系统,简称ABS。
基于模糊控制的车辆防抱死制动系统的研究的开题报告
基于模糊控制的车辆防抱死制动系统的研究的开题报告一、研究背景及意义车辆防抱死制动系统(Anti-lock Braking System,简称ABS)是现代汽车安全性能的重要组成部分。
其主要作用是在车轮即将发生抱死时,防止车轮抱死,保持车轮滚动,使车辆保持方向控制和制动效能。
随着汽车工业的飞速发展,ABS系统的研究已成为汽车工程领域的重要课题。
目前,国内外对ABS系统的研究大多采用传统的控制方法,其固有的不足在于容易受到外界干扰和参数变化等影响,影响系统的控制效果。
为此,需要采用一种更灵活、更鲁棒的控制方法,以提高ABS系统的控制性能和稳定性。
模糊控制是一种能够适应各种非线性系统和复杂动态系统的控制方法,其能够在系统参数存在不确定性的情况下,实现有效的控制。
因此,采用模糊控制方法来设计ABS系统,不仅能够提高系统的控制效果,而且能够有效地提高系统的鲁棒性和抗干扰能力。
本研究旨在基于模糊控制方法,设计一种车辆防抱死制动系统,以提高系统的控制性能和稳定性,为汽车工业的发展做出贡献。
二、研究内容和方法1. 研究反馈控制理论和模糊控制理论的基本原理和方法,分析两种方法的优缺点,确定采用模糊控制的理论基础。
2. 分析ABS系统的控制问题,建立车辆防抱死制动系统的数学模型,包括刹车系统建模和车辆动态特性建模。
3. 设计基于模糊控制的车辆防抱死制动系统的控制器,包括输入变量、输出变量的选择和控制规则的设计。
4. 建立基于Simulink的仿真平台,验证设计的ABS系统的控制器的控制效果和稳定性,并与传统的控制方法进行比较和分析。
5. 在实际车辆上进行测试和验证,分析系统的控制性能和稳定性,为提高ABS系统在实际应用中的性能和可靠性提供参考。
三、研究预期结果及意义本研究旨在采用模糊控制方法设计车辆防抱死制动系统,其预期结果包括:1. 建立基于模糊控制的车辆防抱死制动系统的控制器,实现对车辆防抱死制动系统的控制。
2. 建立基于Simulink的仿真平台,验证设计的ABS系统的控制器的控制效果和稳定性,并与传统的控制方法进行比较和分析,得出模糊控制方法在ABS系统控制中的优越性。
毕业论文(设计)汽车防滑刹车控制器硬件设计
本科毕业论文(设计)题目:汽车防滑刹车控制器硬件设计姓名: ______________________________________ 学号: ______________________________________ 专业: ______________________________________ 院系: ______________________________________ 指导老师: ___________________________________ 实习单位: ___________________________________ 完成时间: __________________________________XXXXXXX教务处制内容摘要随着现代电子技术的发展, 汽车的使用量在不断增加,人们对汽车的行车安全性也越来越重视,汽车防滑刹车控制系统是衡量汽车的安全性能一项重要指标,是防止车抱死的一种机电一体化系统。
汽车防抱死制动系统ABS是改善汽车主动安全性的重要装置,可以防止汽车在紧急刹车时出现的侧滑、跑偏、失去转向操纵能力等不利因素,缩短刹车距离,保证汽车安全制动。
本文首先介绍了国内外的ABS系统的发展现状,然后着重介绍了防抱死控制系统的基本构成及其特点,并详细讨论了防抱死控制器的工作原理,以及各个组成部分的结构及其原理,并根据其原理设计出一种汽车防滑刹车控制器的硬件部分。
关键词:防抱死制动系统;组成及工作原理;控制电路ABSTRACTAlong with the development of modern electronic technology, automobile usage increases, and the people for the automobile driving safety also pay more and more attention to, car antiskid brake control system to measure the safety performance of the car is an important index, is to prevent car lock of a kind of electromechanical integration system. Auto ant-ilock braking system is to improve the safety car ABS initiative the important device, can prevent car in the emergency brake arise when lateral spreads, running deviation and lose steering control ability, shorten the braking distance adverse factors, guarantee car safety brake. This paper firstly introduces the development status of the ABS system, then introduces the basic structure, antilock brake control system and its characteristic, and discussed in detail the working principle, antilock brake controller and component part of the structure and principle, and according to the principle designed an automobile antiskid brake system controller hardware parts.KEY WORDS :Anti-lock braking system; Composition and working principle; Control circuit目录第一章绪论................................................ .11.1 •国内外对防滑刹车控制器的研究背景 (1)1.2 本课题研究的意义............................................. .3第二章防滑刹车控制系统的布置形式及组成 (3)2.1常见ABS系统的布置形式 (4)2.2 ABS系统的组成结构 (5)轮速传感器 (6)电子控制单元ECU (6)制动压力调节装置....................................... ..7第三章防滑刹车控制系统的控制原理 (8)3.1汽车滑移率与附着系数 ....................................... (8)滑移率的定义............................................ .8附着系数............................................... .93.2汽车制动时受力分析 .............................................. .103.3 ABS的工作原理.................................................. .12第四章防滑刹车控制器的硬件设计........................ .144.1防滑控制单元单片机的选择 (16)4.2传感器的设计 (17)4.3 ABS电子控制器(ABSECU的设计................................ .174.4输入信号处理模块 (19)4.5制动压力调节装置的设计 (20)4.6输出控制电路 (22)第五章总结 (24)参考文献.................................................... (25)致第一章绪论随着人们生活水平的提高,家庭轿车越来越普及,因而越来越多的人考虑到汽车制动的安全性能,开始注意到与人生安全密切相关的设备,如ABS安全气囊等。
防抱死制动系统的滑模变结构控制初探

防抱死制动系统的滑模变结构控制初探
柴慧理
【期刊名称】《科学之友》
【年(卷),期】2007(000)016
【摘要】介绍了滑模变结构控制理论及方法,针对汽车防抱死制动系统设计了控制器,并在Matlab/Simulink环境下进行了仿真分析.
【总页数】2页(P23-24)
【作者】柴慧理
【作者单位】山西交通职业技术学院,山西,太原,030031
【正文语种】中文
【中图分类】O231.1
【相关文献】
1.汽车防抱死制动系统的滑模变结构控制器设计 [J], 刘柏楠;郭洪艳;余如;陈虹
2.防抱死制动系统的滑模变结构控制方法研究 [J], 孟杰;陈庆樟;张凯;卜双
3.基于最佳滑移率的防抱死制动系统的滑模变结构控制 [J], 惠有利;王志超
4.防抱死制动系统的滑模变结构控制初探 [J], 柴慧理
5.防抱死制动系统滑模变结构控制研究 [J], 刘显贵;彭聪
因版权原因,仅展示原文概要,查看原文内容请购买。
汽车防抱死制动系统设计研制答辩PPT

整体设计思路
首先对系统进行整体认识通过查阅大量文献我对防 抱死系统有了一个初步的了解理解了其工作原理对 各个部件的功能有了认识。其次防抱死制动系统ABS 的电子控制单元ECU的硬件电路和故障诊断电路进行 了设计。对所选用的器件和电路进行了分析。实践 表明控制电路能够满足ABS的实时性控制要求故障诊 断电路能够准确的检测出元器件故障为维修人员提 供便利。再次我又对防抱死系统进行系统软件的设 计。最后我对论文进行了总结展望了未来ABS 的发展 趋势。
在门限控制方案中,比较量的选择极为重要,也就是根据什么参数来控制 车,轮的滑移率在 20%左右。但是直接以滑移率作为比较对象时的汽车防 抱系统是一 个时变调节系统,其处理难度较大,不适于工程应用。经大 量试验表明:在制动过程中,车轮抱死总是出现在相当大的dw/dt的时刻, 因此预选一个角减速度门、限值、当实测的角减速度超过此门限值时,控 制器发出指令,开始释放制动轮缸、压力,使车轮得以加速旋转。再预选 一个角加速度门限值,当实测的角加速度超,过此门限值时,控制器发出 指令开始增加制动轮缸压力,使车轮减速旋转,以达到控制滑移率的目的 。
论文目的
防抱死制动控制系统(ABS)是在传统制动系统的基础上采用智 能控制技术在制动时自动调节制动力防止车轮抱死充分利用 道路附着力提高制动方向稳定性和操纵稳定性从而获得最大 制动力且缩短制动距离尽可能地避免交通事故发生的机电一 体化安全装置。本文根据防抱死制动控制系统的工作原理应 用汽车单轮运动的力学模型分析了制动过程中的运动情况。 采用基于车轮滑移率的防抱控制理论根据车速、轮速来计算 车轮滑移率。以MSP430F149 单片机为核心完成了输入电路、 输出驱动电路及故障诊断等电路设计阐述了ABS 系统软件各 功能模块的设计思想和实现方法完成了ABS 检测软件、控制 软件的设计。课题所完成的汽车防抱死制动控制系统己通过 模拟试验台的基本性能试验结果表明:汽车防抱死制动控制系 统的硬件电路设计合理可行软件所采用的控制策略正确、有 效系统运行稳定可靠善了汽车制动系统性能.基本能够满足汽 车安全制动的需要。
防抱死制动系统的滑模变结构控制初探
(0 1)
式中, C为待定 系数 , > 。求导得 : CO
口= S+ CS
式中: : 制动器效 能因数;
( 1 1)
一
2 3—
维普资讯
柴慧理 : 防抱死制动系统 的滑模变结 构控制初探
如果以滑移率|和其导数构成一相平面。 s 则切换线是斜率为
在 Maa /i l k环境下进行 了仿真 分析 。 tbSmu n l i 关键词 :防抱死制动 ; 滑模 变结构控制 ; 仿真 中图分类号 :O2 1 文献标识码 :A 3. 1 文章 编号 :10 — 1620 )8 0 2— 2 00 83 (o 7 — 03 0 0
汽车 防抱死 制 动系统 ( n —okBai yt 简称 A S A t l rk gS s m, i c n e B) 是一种机 、 液一体化装置 , 电、 它在传统制 动系统的基础上 , 采用 电子控制技术 , 以实现制动力 的 自动调节 , 防止制 动车 轮抱死 , 以获得最有效的制动效果 , 大大提高车辆的主动安 全性 。 在制动过程 中,轮胎与路面之间的垂直载荷 和附着系数都会 随许多因素而变化 ,其中车轮相对于路 面的运动状态对附着系数
0
\ ( 7 , , )
式中: : 单轮载荷 ; R: 车辆滚动半径 ;
制动力矩 ; 车辆速度 ; W: 车轮角速度 ; :车轮与地面的摩擦力 ; ,车轮转动惯量。 : 轮胎与路面 间纵 向滑移率定义为 : S 1R・ v = 一 / () 3 因此 。轮胎之间 的水平纵 向附着 系数 与纵向滑移率 S之
的影响就很大。如果车轮完全抱死 , 不但达不到最佳制动效果 , 而 且还会丧失转向能力和抵抗侧向力的能力 ,造成汽车制动时方 向
ABS滑模变结构控制器的设计及仿真
中 图 分 类 号 :U4 3 2 6. 5
文 献 标 识 码 :A
文 章 编 号 : 17 — 132 1 )2 0 1—4 6 1 25 (00 0 —0 0 0
0 引 言
目前汽车 A S的应用 中 ,对其性能 的要求越 B
来 越 高 .除 在 硬 件 设 计 方 面 提 高 制 动 防 抱 死 的 性
() 2 函数 切换 控 制
/ + / 4
、 Ui
、
三了s L , <U
能外 ,在 控制算法 上加 以改进 来提 高控制性 能显 得尤为 的重要 。滑模 变结构 控制 的独 特非线 性优 势使其被选择成 为 A S 制器 的控制 方法 ,在汽 B 控
车 A S 面 有 很 大 的发 展 空 间 。本 文 基 于 滑 模 变 B 方
实 际 应 用 中 , 制 力 总 是 受 到 限 制 的 。 另 外 , 统 控 系 的 惯 性 、切 换 开 关 的 时 间 空 间 滞 后 以及 状 态 检 测
( S X2 0 — 3 HL ) YJ C 0 9 0 3 J
读 硕 士研 究 生 , 究 方 向 为汽 车 A S控 制 器设 计 。 研 B 教 授 , 士 , 事 自动 控制 系统 、 车 电子 、 质 评 价方 面 的 研 究 。 博 从 汽 像
付天雷等:B A S滑模 变 结 构 控 制 器 的设 计 及 仿 真
的误差 . 特别对 于计算 机 的采样 系统 , 较长 的采样 时 间形 成 的 “ 准滑模 ” , 将 会在 光 滑 的滑动 模 等 都 态上叠 加一个 锯齿形 的轨迹 。在实际 中抖振 是存 在的, 人们可 以努力去 削弱抖振 的 幅度 , 但无 法完 全消除 。消除抖 振也就 消除 了滑模变结 构控 制 的
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
c1 1 . 280 1 0 . 857 0 1 . 197 3 0 . 194 6 0 . 050 0
c2 23 . 990 33 . 822 25 . 168 94 . 129 306 . 390
c3 0 . 520 0 0 . 347 0 0 . 537 3 0 . 064 6 0
根据已知的模型和参数,可通过求函数极值的方法得到不同路面条件下的使纵向附着系数最大的最 优滑移率,其值为 ln( c1 c2 ) - ln c3 ( 4) λd = c2
以汽车当前的滑移率与期望的最优滑移率之间的偏差为控制变量 ,设计滑模变结构控制器防止汽车在紧 急制动过程中轮胎的抱死。滑模变结构控制的主要思想是设计一个滑模面 ,再设计控制率,使被控系统 状态可快速到达滑模面上,并在滑模面上进行滑模运动直到稳定状态
· [13 ]
。对式( 3 ) 两边同时取导数可得 ( 6) ( 7) ( 8)
20
吉 林 大 学 学 报( 信 息 科 学 版)
第 33 卷
试验确定,调试比较困难。最优控制需要依赖精确的数学模型 ,所以很难在实际中应用。 模糊控制是基 [4 ] 于经验的控制方法,在实际应用中很难建立合适的控制规则 。PID( Proportion Integration Differentiation)
[5 ] 控制算法是工程中常使用的方法 ,便于调试,但不适用于高度非线性系统 。 滑模变结构控制对非线性 [6 ] 和参数不确定的系统具有很强的鲁棒性 ,但其固有的抖动会影响控制效果。笔者针对汽车防抱死系统
中存在的高度非线性问题,采用了滑模变结构控制器进行了研究,同时针对滑模变结构控制的抖动问 [7 ] 题,采用饱和函数代替控制率中符号函数的方法 解决。笔者基于汽车单轮模型设计了滑模变结构控制 器,并在环仿真平台上车辆的硬件上进行了仿真验证 。
1. 3
制动系统模型
制动器的制动力矩表达式
[11 ]
为 Tb = 1 2 πkprd 4 ( 5)
第1 期
刘柏楠,等: 汽车防抱死制动系统的滑模变结构控制器设计
21
其中 k 为制动能效因数,p 为制动管路压力,r 为制动盘的作用半径,d 为制动轮缸直径。
2
控制器设计
在载荷不变的情况下,汽车在制动过程中所受到的制动力与地面的附着系数成正比 ,即附着系数越 大其相应的地面制动力越大。通过实验测定,轮胎与地面之间的附着系数与轮胎的滑移率之间呈现非线 性的对应关系( 见图 2 ) 。 由图 2 可知,车辆在不同的 路面行驶时,轮胎与路面间的附着系数是不同的。 在 一种确定的路面条件下,最优滑移率对应该路面条件 下最大的纵向附着系数,此时对应的地面制动力最 大。因此,所设计的控制器要使车轮的滑移率平稳跟 踪确定路面条件下的最优滑移率,得到最大的地面制 动力。 针对轮胎与地面之间的附着系数和轮胎的滑移率 之间的高度非线性问题,考虑到滑模变结构控制器 ( SMC : Sliding Mode Controller ) 具有很好的鲁棒性和 [12 ] 抗干扰能力,并且不要求精确的系统模型 ,因此, 图 2 路面附着系数和滑移率之间的关系曲线 Fig. 2 The relation curve between the tireroad friction coefficient and sliding rate
Abstract : In the light of highly nonlinear problems existed in Antilock Braking System ,using error between the current sliding rate and the current road optimal sliding rate as the control value ,a sliding model variable structure controller is designed. We firstly established the model of the vehicle driving wheels,design a sliding mode variable structure controller and handle the chattering problem existed in the sliding mode controller. The method used by this paper effectively disminishes the chatter. In the end ,applying the designed sliding mode variable structure controller to veDYNA software to make hardwareintheloop simulation. The simulation result shows that the designed controller effectively prevents the lock of the vehicle wheels. Key words: control theory ; sliding rate; sliding mode control; hardwareintheloop
0
引
言
随着汽车工业的发展,人们对汽车速度的要求越来越高,因此对汽车安全性能的要求也越来越高, 尤其是在高速行驶时的制动性能 。当汽车在行驶过程中遇到例如紧急避障 、爆胎等紧急情况时,驾驶员 通常会猛踩制动踏板,以期获得最佳的制动力。然而这样会导致汽车轮胎抱死,使轮胎与地面间的滚动 [1 ] lock 摩擦变为滑动摩擦,轮胎的抓地力变为零,导致交通事故的发生 。 汽车防抱死系统 ( ABS: AntBraking System) 是针对此类问题而设计的一种主动安全装置 ,滑移率是汽车制动性能的一个重要过程参 [2 ] 数,即通过将汽车的实际滑移率控制在最佳滑移率附近 ,以得到最佳的制动性能 。 目前,针对 ABS 的 控制算法主要有逻辑门限值控制 、最优控制和模糊控制等
λ = f + hT r h = Jv x f = Fx 2 Rω R 2 vx - Jv x vx
设计的滑模变结构控制器的控制目标是使车辆实际滑移率实时跟踪当前路面条件下的最优滑移率 , 该控制目标是个跟踪问题,设 λ d 为跟踪的最优滑移率,则定义控制器的跟踪误差为 λe = λ - λd 面为 s1 = λ e = 0 对滑模面的两边同时取微分,并且考虑到滑模存在的条件,笔者采用等速趋近律 器,可得到 = f + hT - λ d ≤ - ηsgn( s) s ( 11 ) f 对函数 f 式( 11 ) 中,f 是非线性的而且存在时变参数,所以 f 的值无法精确得到。假设估计值函数 ^ 进行估计,并且估计误差的上界是已知函数 F 。估计误差函数 F 的引入有效降低了系统的非线性,但也 使控制存在了一定的误差,由于笔者主要是针对滑移率控制进行算法研究 ,不考虑实际系统中存在的干 扰因素,因此假设 F = 0 ,可以得到 ^ ( 12 ) f -f ≤F 综上,如果以驱动轮的制动力矩作为控制器的控制输入 ,可以得到滑模控制器的控制输入为 Tb = 1 des - ηsgn( s) ] [- ^ f +λ h ( 13 )
Design of Sliding Mode Variable Structure Controller for AntiLock Braking System
b b b LIU Bainan a, ,GUO Hongyan a, ,YU Ru a ,CHEN Hong a,
( a. State Key Laboratory of Automotive Simulation and Control ; b. College of Communication Engineering,Jilin University,Changchun 130022 ,China)
1
1. 1
系统பைடு நூலகம்模
车辆动力学建模
设计控制器所使用的车辆动力学模型是单轮模型 ( 见图 1 ) , 由于风阻和滚动阻力对制动过程的影响较小 ,所以笔者没有考虑, 对应的纵向动力学方程为 Fx = μx N x = - Fx mv
图 1 单轮车辆模型 Fig. 1 Singlewheel vehicle model
汽车防抱死制动系统的滑模变结构控制器设计
a, b a, b 刘柏楠 ,郭洪艳 ,余 a 如 ,陈
虹
a, b
( 吉林大学 a. 汽车仿真与控制国家重点实验室; b. 通信工程学院,长春 130022 )
摘要: 针对汽车防抱死系统中存在的高度非线性问题 ,以汽车当前的滑移率和当前路况下的最优滑移率之间的 偏差作为控制变量,设计了滑模变结构控制器 。在对汽车的驱动轮进行建模的基础上 ,设计了滑模变结构控制 器,并对滑模控制器中存在的抖动问题进行了处理 ,有效减小了因滑模变结构控制算法中抖动问题所带来的影 响。同时将该滑模变结构控制器应用于实车仿真软件 veDYNA 中进行了硬件环仿真实验 。 仿真结果表明, 该控制器可有效防止汽车轮胎抱死 。 关键词: 控制理论; 滑移率; 滑模控制; 硬件在环 中图分类号: TP273 文献标识码: A
[3 ]
。逻辑门限值控制器的各个门限值需要反复
0217 收稿日期: 2014基金项目: 国家自然科学基金资助项目 ( 91220301 ) 15144140756 ( Email ) 作者简介: 刘柏楠( 1989 — ) ,男,长春人,吉林大学硕士研究生,主要从事车辆稳定性控制研究,( Tel ) 86bainan123@ yeah. net; 陈虹( 1963 — ) ,女,浙江桐乡人,吉林大学教授,博士生导师,主要从事先进控制与系统仿真研 13578797009 ( Email) chenh@ jlu. edu. cn。 究,( Tel) 86-